REFORZAMIENTO SÍSMICO DE NAVES INDUSTRIALES CON VIGAS SAN ANDRÉS Dr. Roberto Aguiar Falconí Centro de Investigaciones Científicas, Escuela Politécnica del Ejército. Correo electrónico: [email protected] Natalia Bermeo Carrera de Ingeniería Civil, Escuela Politécnica del Ejército. RESUMEN Los arriostramientos se consideran generalmente como elementos secundarios en la configuración de estructuras, sin embargo estos tienen un papel importante dentro del comportamiento del conjunto estructural. En el presente artículo, se encuentra el cálculo para el arriostramiento "VIGA SAN ANDRÉS", constituido por entramados dispuestos en forma de cruz, que se localizan en los extremos de las naves industriales y la solución planteada para este tipo de viga es como el de una celosía. Los cálculos se realizaron mediante programas de CEINCI-LAB, que permiten obtener los desplazamientos y fuerzas de la estructura frente a un sismo. ABSTRACT The braces are generally considered as secondary elements in shaping structures, but these have an important role in the behavior of the structural assembly. This article is the calculation for the bracing "SAN ANDRÉS BEAM", consisting of lattices arranged in a cross, which are located at the ends of the industrial buildings and the proposed solution for this type of beam is like a lattice. The calculations were performed using CEINCI-LAB’s programs, which can obtain the displacements and forces of the structure in an earthquake.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

REFORZAMIENTO SÍSMICO DE NAVES INDUSTRIALES CON VIGAS SAN ANDRÉS
Dr. Roberto Aguiar Falconí Centro de Investigaciones Científicas, Escuela Politécnica del Ejército. Correo electrónico: [email protected] Natalia Bermeo Carrera de Ingeniería Civil, Escuela Politécnica del Ejército.
RESUMEN
Los arriostramientos se consideran generalmente como elementos secundarios en la
configuración de estructuras, sin embargo estos tienen un papel importante dentro del comportamiento del conjunto estructural.
En el presente artículo, se encuentra el cálculo para el arriostramiento "VIGA SAN
ANDRÉS", constituido por entramados dispuestos en forma de cruz, que se localizan en los extremos de las naves industriales y la solución planteada para este tipo de viga es como el de una celosía.
Los cálculos se realizaron mediante programas de CEINCI-LAB, que permiten obtener
los desplazamientos y fuerzas de la estructura frente a un sismo.
ABSTRACT
The braces are generally considered as secondary elements in shaping structures, but these have an important role in the behavior of the structural assembly.
This article is the calculation for the bracing "SAN ANDRÉS BEAM", consisting of lattices
arranged in a cross, which are located at the ends of the industrial buildings and the proposed solution for this type of beam is like a lattice.
The calculations were performed using CEINCI-LAB’s programs, which can obtain the
displacements and forces of the structure in an earthquake.

Segundo Encuentro de Investigación
Científica desde las Aulas2
1. INTRODUCCIÓN
La humanidad a lo largo de la historia ha usado diversos materiales dentro de la
construcción, dentro de los cuales está el acero; este presenta ventajas tanto en sus características (alta resistencia, uniformidad, durabilidad, ductilidad), como en la rapidez de montaje, convirtiéndolo en un material optimo y de gran acogida en el medio constructivo por su diversidad de usos.
Dentro de las estructuras metálicas desarrolladas ampliamente en nuestro medio están
las naves industriales, que son instalaciones que cubren grandes claros con el fin de generar espacios sin existencia de apoyos intermedios, dada la alta peligrosidad sísmica y las condiciones propias de nuestra región han dejado ver los efectos sobre las construcciones de este tipo, cuando no se realiza un correcto diseño. A continuación algunas imágenes de daños típicos de estas estructuras:
Figura 1. Pandeo general de las correas por empuje de viento en el muro hastial a barlovento (Rosario -Argentina).
Figura 2. Pandeo de las correas por empuje de viento en el muro hastial y succiones localizadas (Rosario -Argentina).

Dr. Roberto AguiarNatalia Bermeo
3
Figura 3. Estructura metálica de 320 m2 sin tensores o diagonales (Valle de los Chillos).
Figura 4. Nave industrial de 1000 m2 sin tensores o diagonales (Sector Parque de los Recuerdos y 10 de Agosto - Quito).
La amenaza sísmica existente en el lugar donde se desarrollan las edificaciones no es
sujeto de modificación por parte del hombre1, pero si podemos disminuir la vulnerabilidad de estructuras mediante métodos sistemáticos de reforzamiento como las vigas San Andrés.
1 CRISAFULLI, Francisco Javier. Diseño sismorresistente de construcciones de acero. Santiago, ILAFA, pág. 3

Segundo Encuentro de Investigación
Científica desde las Aulas4
2. MARCO TEÓRICO
Se presenta el marco teórico para el análisis sísmico de estructuras con masas puntuales en las que se desprecia el momento de inercia de la masa. 2.1. Matriz de Masas
La matriz de masas se halla evaluando la energía cinética “T”, que es igual a la energía cinética de traslación más la energía cinética de rotación y queda expresada de la siguiente forma:
. (1)
Donde “m” es la masa, “V” es la velocidad lineal de traslación, “J” es el momento de inercia de la masa y “θ.2”es la velocidad angular. Aguiar (2012).
Las naves industriales utilizan una cubierta liviana (eternit, deck metálico etc.) y se debe
realizar el análisis usando el modelo con piso flexible, que concentra las masas en cada junta como se puede observar en la figura 5. En la parte izquierda, se numeran los grados de libertad con los cuales se determinara la matriz de rigidez de la estructura y en la parte derecha podemos observar la ubicación de las masas. Para este modelo se considera que todos los elementos son totalmente flexibles, es decir tenemos tres grados de libertad por nudo (desplazamiento en “x”, “y”, “z”).
Figura 5. Grados de libertad para análisis estático y dinámico. Modelo de masas puntuales en nudos.
Dentro de la numeración de los grados de libertad se empieza con el sentido “x”, luego el sentido “y” y finalmente las rotaciones de los nudos. Las coordenadas principales son los desplazamientos horizontales y verticales; las coordenadas secundarias son los giros, en la parte central de la figura 5, se indican las coordenadas principales.
Para el modelo de masas puntuales en las juntas, la forma de la matriz de masas es la
siguiente:
(2)

Dr. Roberto AguiarNatalia Bermeo
5
…
(3)
El valor de “m” se determina mediante el siguiente procedimiento: - Calculamos los pesos de cada elemento que conforma la estructura.
(4)
Donde “A” es el área de la sección transversal, “ ” peso específico del material y “L” longitud del elemento.
- Calculamos el peso total de la estructura al realizar una sumatoria de los pesos parciales de
los diferentes componentes de la misma, tales como mampostería, material de cubierta y carga de mantenimiento.
- Finalmente la masa puntual, es el peso en función del área cooperante de cada nudo fraccionado para el valor de la gravedad.
(5)
2.2. Matriz de Rigidez de un elemento en coordenadas locales
Al considerar como sistema P - p de un elemento el presentado en la figura 6, en donde
no se incluyen los desplazamientos como cuerpo rígido. A éste sistema se denomina por didáctica sistema 1, el vector “p” mide las deformaciones con el siguiente formulario:
(6)
(7)
(8)
Figura 6. Sistema de coordenadas en el sistema 1.
L

Segundo Encuentro de Investigación
Científica desde las Aulas6
Por otro lado la matriz de rigidez para elementos de sección constante en los cuales se
considera el efecto de corte es:
0
0
0 0
(9)
(10)
Donde “β” es el factor de forma por corte de la sección, “E” es el módulo de elasticidad
del material, “I” inercia a flexión de la sección transversal, “G” módulo de corte, “A” área del elemento y “L” longitud del elemento.
Como la matriz de rigidez está asociada al sistema 1 se ha colocado el subíndice 1 en
dicha matriz. Ahora se quiere calcular la matriz de rigidez para un elemento lineal en el cual se incluyan las deformaciones como cuerpo rígido. Por lo tanto el nuevo sistema P* - p* será el indicado en la figura 7. Por didáctica se ha colocado el asterisco debido a que se va a calcular la nueva matriz de rigidez por medio de la matriz de transformación de coordenadas “T”.
Figura 7. Coordenadas locales de un elemento.
Al sistema de coordenadas del elemento de la figura 7, se denomina sistema 2 y el significado de cada una de las deformaciones es el siguiente:
p1*: Es la componente de desplazamiento axial del nudo inicial del elemento. p2*: Es la componente de desplazamiento transversal del nudo inicial del elemento. p3*: Es la rotación de la elástica en el nudo inicial del elemento. p4*: Es la componente de desplazamiento axial del nudo final del elemento. p5*: Es la componente de desplazamiento transversal del nudo final del elemento. p6*: Es la rotación de la elástica en el nudo final del elemento.
La convención de signos positiva de las deformaciones en el sistema de coordenadas 2
es la que se indica en la figura 7. A este sistema se denomina “Coordenadas Locales”. Evidentemente la matriz que relaciona las cargas P* con los desplazamientos p* es la
L

Dr. Roberto AguiarNatalia Bermeo
7
matriz de rigidez de un elemento k*. En efecto se tiene que:
(11)
Calculamos k* mediante la determinación de una matriz de paso de las coordenadas del
sistema 1 al sistema 2, a ésta matriz se denomina “T”, definida de la siguiente manera:
(12) El sistema viejo de coordenadas es el sistema 1 y el sistema nuevo de coordenadas el
sistema 2. Para el cálculo de la matriz “T” se construyen deformadas elementales en el sistema nuevo y se mide en el viejo. A la matriz “T” que se ha obtenido y que permite pasar de los resultados del sistema 1 al sistema 2 se le denomina T1-2 y está definida así:
0 1 0 0
0 0 0 1 1 0 0 1 0 0
(13)
Para calcular la matriz de rigidez en el nuevo sistema de coordenadas k* se debe realizar
el siguiente triple producto matricial Tt1-2 k1 T1-2. A la matriz de rigidez en coordenadas locales se
ha denominado k2, luego:
(14) El resultado obtenido luego de esta operación es:
0 0 0 0
0 0
0 0
0 0 0 0
0 0
0 0
(15)
2.3. Matriz de rigidez de un elemento en coordenadas globales En forma general se puede indicar que las coordenadas locales se miden axial y
transversal al eje del elemento, en cambio las coordenadas globales miden en forma horizontal y vertical en consecuencia éstas últimas tienen la misma orientación que las coordenadas de la estructura.

Segundo Encuentro de Investigación
Científica desde las Aulas8
Figura 8. Coordenadas locales y globales de un elemento.
En la figura 8, se tiene un elemento inclinado que forma un ángulo “α” con la horizontal,
a la izquierda se indica el sistema de coordenadas locales y a la derecha el sistema de coordenadas globales.
En la figura 8 se ha utilizado el asterisco para definir las coordenadas globales del elemento. Esto se lo hace porque se va a emplear la transformación de coordenadas para calcular k* que posteriormente se va a denominar k3 ya que al sistema de coordenadas globales se denomina sistema 3.
La matriz de paso del sistema 2 al sistema 3 se denomina T2-3, resultando que ésta matriz es:
0 0 0 0 0 0 0 0
0 0 1 0 0 00 0 0 00 0 0 00 0 0 0 0 1
(16)
Con ésta notación se realiza el siguiente producto matricial que conduce al cálculo de k3.
(17)
2.4. Matriz de Rigidez
Para calcular la matriz de rigidez de la estructura, se debe determinar la rigidez de cada elemento que compone la misma mediante la ecuación N° 17.
Luego se halla la matriz de rigidez de cada pórtico, mediante ensamblaje directo de la
matriz de rigidez de cada miembro, la misma que se debe condensar en base al número de grados de libertad principales (horizontal y vertical). Finalmente se calcula la matriz de rigidez total al ensamblar la matriz de rigidez de los pórticos.

Dr. Roberto AguiarNatalia Bermeo
9
2.5. Condensación de la Matriz de Rigidez
En la figura 9, se presenta un pórtico tipo para nuestro análisis, en la parte izquierda podemos observar los grados de libertad y en el otro extremo en cambio tenemos las coordenadas principales a las cuales vamos a condensar la matriz de rigidez.
Figura 9. Coordenadas “a” y “b” del pórtico tipo.
El cálculo para condensar la matriz de rigidez, parte de la ecuación básica de análisis estático que relaciona el vector de cargas generalizadas “Q”, con el vector de coordenadas generalizadas “q”, por medio de la matriz de rigidez “K” y está definida mediante la siguiente ecuación:
(18)
El vector de cargas generalizadas “Q”, como el vector de coordenadas generalizadas “q”, están particionados como se muestra a continuación:
(19)
(20)
Reemplazamos los anteriores valores en la ecuación básica de análisis estático, quedándonos una matriz de rigidez de la estructura de la siguiente forma:
(21)
Luego procedemos a condensar a las coordenadas “a”, para lo cual 0 obteniendo finalmente:
(22)

Segundo Encuentro de Investigación
Científica desde las Aulas10
2.6. Valores Propios
Para calcular los valores propios partimos de la ecuación descrita más adelante, donde “λ” es el valor propio y “ø” es el vector propio. La ecuación tiene soluciones “ø” distintas de cero, solamente si el determinante de la matriz de coeficientes es nulo.
0 (23)
| | 0 (24)
Resolviendo la ecuación obtenemos un polinomio donde encontramos las diferentes raíces de “λ”.
0 (25)
El siguiente paso es calcular las frecuencias de vibración y los periodos.
√ (26)
(27)
2.7. Modos de Vibración
Cada uno de los valores propios, está asociado a un modo de vibración, los cuales nos indican la forma cómo va a responder la estructura y son adimensionales. Por ejemplo para el cálculo del primer modo de vibración se tiene:
0 (28)
Figura 10. Modos de vibración ilustrativos.

Dr. Roberto AguiarNatalia Bermeo
11
2.8. Viga San Andrés
Esta clase de viga es un tipo de arriostramiento, que mejora el comportamiento del conjunto estructural, dándonos una respuesta adecuada frente a eventos sísmicos. Dentro del caso de las naves industriales, se han empleado arriostramientos en los planos de cubierta dispuestos en cruces de San Andrés, los cuales absorben empuje y limitan las longitudes de pandeo. El modelo de cálculo resuelve este arriostramiento como una armadura, conformada por los perfiles, correas y diagonales.
Figura 11. Esquema nave industrial con viga San Andrés.
Las armaduras o celosías son elementos que tienen únicamente deformaciones axiales y su sistema de coordenadas es el indicado en la figura 12.
Figura 12. Sistema de coordenadas elemento transversalmente rígido.
PÓRTICOS
ENTRAMADO LATERAL
PILAR
TENSORES
CORREAS
L L

Segundo Encuentro de Investigación
Científica desde las Aulas12
En la figura 12, el sistema de la izquierda tiene:
(29)
(30)
Calculamos k* que se ha denominado k2 para ello se tiene:
(31)
Para calcular T1-2 se tiene que:
(32)
Los elemento con los que estamos trabajando son I = ∞, en consecuencia no trabajan a flexión; de donde la matriz T1-2 tiene los siguientes valores.
1 0 1 0 (33)
Al aplicar la ecuación N° 31 tenemos:
0 0 0 0 0 0
0 0 0 0 0 0
(34)
2.8.1. Matriz de rigidez de un elemento en coordenadas globales
La matriz de paso de coordenadas locales a coordenadas globales en armaduras planas es:
0 0 0 0
0 0 0 0
(35)
Para hallar la matriz de rigidez en coordenadas globales k3 se realiza la siguiente operación:
(36)

Dr. Roberto AguiarNatalia Bermeo
13
(37)
Se calcula la matriz de rigidez total “K” luego de un proceso de ensamblaje de cada una de las matrices de rigidez de los elementos de la celosía, mientras que el vector de cargas generalizadas “Q” resulta de la fuerza sísmica total repartida en la viga San Andrés y el vector de coordenadas generalizadas “q” se determina mediante:
\ (38)
El vector de deformaciones en coordenadas globales “p”, se obtiene al ensamblar “q” en “p” por medio del vector de colocación y para hallar las acciones de los elementos en coordenadas globales “PG”, debemos multiplicar la matriz de rigidez de miembro con las deformaciones “p”.
(39)
Las acciones de los elementos en coordenadas locales “PL”, se determina mediante:
(40)
(41)
2.9. Coeficiente Sísmico
De acuerdo al NEC-11, el coeficiente sísmico “c” se halla con la siguiente ecuación:
(42)
Donde “I” es el coeficiente de importancia, “Sa” coeficiente de la aceleración de la gravedad para el período fundamental, “R” factor de reducción de las fuerzas sísmicas por disipación de energía, “ p” factor de irregularidades en planta y “ e” factor de irregularidades en elevación. 3. ESTRUCTURA DE ANÁLISIS
A continuación, vamos a describir algunos parámetros necesarios para el análisis de la estructura objeto de nuestro estudio.
3.1. Zona sísmica
La estructura está localizada en la región sierra de Ecuador, específicamente en la ciudad de Quito donde la aceleración sísmica es de 0.4 g, como se puede apreciar en el gráfico.

Segundo Encuentro de Investigación
Científica desde las Aulas14
Figura 13. Ecuador, zonas sísmicas para propósitos de diseño.
El valor del factor de zona “Z” 2 está en función de la zona sísmica adoptada, esto se puede apreciar de mejor manera en el siguiente cuadro:
Tabla 1. Valores del factor Z en función de la zona sísmica adoptada.
ZONA SÍSMICA I II III IV V VI VALOR FACTOR “Z” 0.15 0.25 0.30 0.35 0.40 ≥ 0.50 CARACTERIZACIÓN DE LA AMENAZA SÍSMICA
Intermedia
Alta
Alta
Alta
Alta
Muy Alta
3.2. Tipo de Perfil de Suelo
La estructura está implantada sobre un perfil de suelo tipo “C”, cuya descripción se halla detallada en la página 35 del NEC 11 “Peligro sísmico y requisitos de diseño sismo resistente”.
2 NEC-11 (NORMA ECUATORIANA DE LA CONSTRUCCIÓN 2011). “PELIGRO SÍSMICO Y REQUISITOS DE DISEÑO SISMO RESISTENTE”. (pág. 9-23).

Dr. Roberto AguiarNatalia Bermeo
15
3.3. Factor de Reducción “R”
A fin de trabajar con espectros inelásticos, utilizamos un valor de reducción de las fuerzas sísmicas “R” de:
4
3.4. Materiales y Propiedades
La estructura de acero, con lámina delgada y cubierta de eternit, está conformada por los siguientes elementos:
Tabla 2. Área e inercia de elementos adoptados.
ELEMENTO
DIMENSIONES
USO
ÁREA (cm2)
INERCIA (cm4)
Tubo estructural cuadrado.
10 cm/10 cm/3 mm Conformación de vigas y columnas
11.41 176.95
Varilla 16 mm Diagonales 2.01 5.14 Perfil “C” 50 cm/25 cm/3 mm Correas 2.70 9.70
3.5. Solución con Vigas San Andrés Primera Opción
Esquema
Figura 14. Geometría de la nave y descripción de elementos.
3
6
3
3
CORREA CON PERFIL "C" 50 cm / 25 cm / 3 mm
1,5
3
DIAGONALES Ø 16 mm
TUBO CUADRADO 10cm/10cm/3mm

Segundo Encuentro de Investigación
Científica desde las Aulas16
Figura 15. Implantación de cubierta y descripción de elementos.
Figura 16. Numeración de los grados de libertad.
3 3 3
3,35
3,35
1,68
3,35
1,68
1,5 3 3 1,5
TUBOCUADRADO 10/10/3
DIAGONALES Ø 16 mm
CORREA PERFIL "C" 50/25/3
3
6
3
3
3
1,5

Dr. Roberto AguiarNatalia Bermeo
17
Matriz de Rigidez Pórticos
Pórtico Transversal Interior
Pórtico Transversal Exterior
3
31,
5
3 3
31,
5
3
3
31,
5
3 3
31,
5
3

Segundo Encuentro de Investigación
Científica desde las Aulas18
Pórtico Longitudinal Interior o de Cumbrero
Pórtico Longitudinal Exterior
3
4.5
3 3 3
4.5
3 3
9 9
3
3
3 3 3
3
3 3

Dr. Roberto AguiarNatalia Bermeo
19
Masas y Períodos de Vibración
Tenemos los siguientes valores de masas para los distintos nudos.
Tabla 3. Valores de masas puntuales.
MASA VALOR m = 0.0185815
m1 = 0.0264867 m2 = 0.0276630 m3 = 0.0423943
Figura 17. Distribución masas puntuales.
Tabla 4. Valores de períodos de vibración.
PERÍODO VALOR PERÍODO VALOR PERÍODO VALOR PERÍODO VALOR 1 0.9381 10 0.0163 19 0.0093 28 0.0075 2 0.4181 11 0.0132 20 0.0085 29 0.0074 3 0.4181 12 0.0132 21 0.0085 30 0.0074 4 0.2759 13 0.0103 22 0.0077 31 0.0062 5 0.2759 14 0.0103 23 0.0077 32 0.0062 6 0.2632 15 0.0102 24 0.0077 33 0.0062 7 0.2632 16 0.0102 25 0.0075 34 0.0062 8 0.0339 17 0.0094 26 0.0075 35 0.0061 9 0.0336 18 0.0093 27 0.0075 36 0.0061
3
6
3
3
3
1,5

Segundo Encuentro de Investigación
Científica desde las Aulas20
Desplazamientos Elásticos e Inelásticos
Tabla 5. Desplazamientos elásticos obtenidos.
Tabla 6. Desplazamientos inelásticos obtenidos.
DESPLAZAMIENTO INELÁSTICO
VALOR (m)
DESPLAZAMIENTO INELÁSTICO
VALOR (m)
DESPLAZAMIENTO INELÁSTICO
VALOR (m)
1 0.0000 13 0.0225 25 0.0000 2 0.0000 14 0.0225 26 0.0000 3 0.0000 15 0.0225 27 0.0000 4 0.0001 16 0.0225 28 0.0000 5 0.0000 17 0.2147 29 0.0000 6 0.0001 18 0.2147 30 0.0005 7 0.0001 19 0.2147 31 0.0005 8 0.0000 20 0.2147 32 0.0000 9 0.0001 21 0.0225 33 0.0000 10 0.0000 22 0.0225 34 0.0000 11 0.0000 23 0.0225 35 0.0000 12 0.0000 24 0.0225 36 0.0000
Deriva Global
21.47450
. %
DESPLAZAMIENTO ELÁSTICO
VALOR (m)
DESPLAZAMIENTO ELÁSTICO
VALOR (m)
DESPLAZAMIENTO ELÁSTICO
VALOR(m)
1 0.0000 13 0.0056 25 0.0000 2 0.0000 14 0.0056 26 0.0000 3 0.0000 15 0.0056 27 0.0000 4 0.0000 16 0.0056 28 0.0000 5 0.0000 17 0.0537 29 0.0000 6 0.0000 18 0.0537 30 0.0001 7 0.0000 19 0.0537 31 0.0001 8 0.0000 20 0.0537 32 0.0000 9 0.0000 21 0.0056 33 0.0000 10 0.0000 22 0.0056 34 0.0000 11 0.0000 23 0.0056 35 0.0000 12 0.0000 24 0.0056 36 0.0000

Dr. Roberto AguiarNatalia Bermeo
21
Fuerzas Laterales
Tabla 7. Fuerzas laterales obtenidas.
FUERZA LATERAL VALOR (T) FUERZA LATERAL VALOR
(T) FUERZA LATERAL VALOR (T)
1 0.0000 13 0.0542 25 0.0000 2 0.0000 14 0.0770 26 0.0000 3 0.0000 15 0.0770 27 0.0000 4 0.0000 16 0.0542 28 0.0000 5 0.0000 17 0.0665 29 0.0000 6 0.0000 18 0.1019 30 0.0004 7 0.0000 19 0.1019 31 0.0004 8 0.0000 20 0.0665 32 0.0000 9 0.0000 21 0.0542 33 0.0000 10 0.0000 22 0.0770 34 0.0000 11 0.0000 23 0.0770 35 0.0000 12 0.0000 24 0.0542 36 0.0000
0.8624
61.6
Coeficiente Sísmico
∑ 0.86243.1333 0.2752
Viga San Andrés
Figura 18. Esquema viga San Andrés y distribución fuerza puntual.
1.10 m 1.10 m
3.00
m
1.10 m 1.10 m
DIAGONALES 16 mm
1.10 m 1.10 m

Segundo Encuentro de Investigación
Científica desde las Aulas22
Figura 19. Numeración de nudos y elementos de la viga.
Figura 20. Numeración de los grados de libertad de la viga.
A continuación se escriben los valores para desplazamientos elásticos e inelásticos de la viga:
Tabla 8. Desplazamientos elásticos obtenidos.
DESPLAZAMIENTO ELÁSTICO
VALOR (mm)
DESPLAZAMIENTO ELÁSTICO
VALOR(mm)
DESPLAZAMIENTO ELÁSTICO
VALOR(mm)
1 -0.0018 9 0.0018 17 0.0000 2 -0.0787 10 -0.0787 18 -0.1448 3 -0.0014 11 0.0090 19 -0.0045 4 -0.1223 12 -0.0165 20 -0.1300 5 0.0000 13 0.0079 21 -0.0079 6 -0.1376 14 -0.0842 22 -0.0842 7 0.0014 15 0.0045 23 -0.0090 8 -0.1223 16 -0.1300 24 -0.0165
1.10 m 1.10 m 1.10 m 1.10 m
3.00
m
1.10 m 1.10 m
1.10 m 1.10 m 1.10 m 1.10 m
3.00
m
1.10 m 1.10 m

Dr. Roberto AguiarNatalia Bermeo
23
Tabla 9. Desplazamientos inelásticos obtenidos.
DESPLAZAMIENTO INELÁSTICO
VALOR (mm)
DESPLAZAMIENTO INELÁSTICO
VALOR(mm)
DESPLAZAMIENTO INELÁSTICO
VALOR(mm)
1 -0.0070 9 0.0070 17 0.0000 2 -0.3147 10 -0.3147 18 -0.5793 3 -0.0057 11 0.0360 19 -0.0179 4 -0.4892 12 -0.0661 20 -0.5202 5 0.0000 13 0.0314 21 -0.0314 6 -0.5503 14 -0.3370 22 -0.3370 7 0.0057 15 0.0179 23 -0.0360 8 -0.4892 16 -0.5202 24 -0.0661
Tabla 10. Desplazamientos inelásticos en nudos.
Después tenemos los valores de las fuerzas finales, en quince miembros de la viga:
Tabla 11. Fuerzas finales en miembros.
ELEMENTO NUDO INICIAL NUDO FINAL 1 125.8174 0.0000 -125.8174 0.0000 2 10.0443 0.0000 -10.0443 0.0000 3 13.9439 0.0000 -13.9439 0.0000 4 13.0340 0.0000 -13.0340 0.0000 5 13.9439 0.0000 -13.9439 0.0000 6 10.0443 0.0000 -10.0443 0.0000 7 125.8174 0.0000 -125.8174 0.0000 8 95.6277 0.0000 -95.6277 0.0000 9 -68.3981 0.0000 68.3981 0.0000 10 57.6999 0.0000 -57.6999 0.0000 11 -40.7156 0.0000 40.7156 0.0000 12 25.8639 0.0000 -25.8639 0.0000 13 -6.9413 0.0000 6.9413 0.0000 14 -6.9413 0.0000 6.9413 0.0000 15 25.8639 0.0000 -25.8639 0.0000
CORDÓN INFERIOR CORDÓN SUPERIOR NUDOS 2 y 6 3 y 5 4 8 y 14 9 y 13 10 y 12 11
DESP. VERT. ↓ (mm)
0.3147 0.4892 0.5503 0.0661 0.337 0.5202 0.5793

Segundo Encuentro de Investigación
Científica desde las Aulas24
3.6. Solución con Vigas San Andrés Segunda Opción
Básicamente en esta opción modificamos la distribución de las diagonales en el plano del techo y se muestra a continuación.
Esquema
Figura 21. Geometría de la nave y descripción de elementos.
Figura 22. Implantación de cubierta y descripción de elementos.
3
6
3
3
1,5
3
DIAGONALES Ø 16 mm
TUBO CUADRADO 10cm/10cm/3mm
CORREA CON PERFIL "C" 50 cm / 25 cm / 3 mm
3 3 3
3,35
3,35
1,68
3,35
1,68
1,5 3 3 1,5
TUBOCUADRADO 10/10/3
DIAGONALES Ø 16 mm
CORREA PERFIL "C" 50/25/3

Dr. Roberto AguiarNatalia Bermeo
25
Matriz de Rigidez Pórticos
Los resultados en cuanto a matrices de rigidez, no varía dado que seguimos trabajando con un sistema de 36 grados de libertad.
Figura 23. Numeración de los grados de libertad.
Masas y Períodos de Vibración
Tenemos los siguientes valores de masas para los distintos nudos.
Figura 24. Distribución masas puntuales.
3
6
3
3
3
1,5
3
6
3
3
3
1,5

Segundo Encuentro de Investigación
Científica desde las Aulas26
Tabla 12. Valores de masas puntuales.
MASA VALOR m = 0.0182169
m1 = 0.0261221 m2 = 0.0269337 m3 = 0.0416651
A continuación se muestran los periodos obtenidos:
Tabla 13. Valores de períodos de vibración.
PERÍODO VALOR PERÍODO VALOR PERÍODO VALOR PERÍODO VALOR 1 0.9293 10 0.0161 19 0.0092 28 0.0075 2 0.4154 11 0.0131 20 0.0084 29 0.0074 3 0.4154 12 0.0131 21 0.0084 30 0.0074 4 0.2739 13 0.0103 22 0.0076 31 0.0062 5 0.2739 14 0.0102 23 0.0076 32 0.0062 6 0.2603 15 0.0101 24 0.0076 33 0.0061 7 0.2603 16 0.0101 25 0.0075 34 0.0061 8 0.0337 17 0.0093 26 0.0075 35 0.0061 9 0.0334 18 0.0093 27 0.0075 36 0.0061
Desplazamientos Elásticos e Inelásticos
Tabla 14. Desplazamientos elásticos obtenidos.
DESPLAZAMIENTO ELÁSTICO
VALOR (m)
DESPLAZAMIENTO ELÁSTICO
VALOR(m)
DESPLAZAMIENTO ELÁSTICO
VALOR(m)
1 0.0000 13 0.0055 25 0.0000 2 0.0000 14 0.0055 26 0.0000 3 0.0000 15 0.0055 27 0.0000 4 0.0000 16 0.0055 28 0.0000 5 0.0000 17 0.0532 29 0.0000 6 0.0000 18 0.0532 30 0.0001 7 0.0000 19 0.0532 31 0.0001 8 0.0000 20 0.0532 32 0.0000 9 0.0000 21 0.0055 33 0.0000 10 0.0000 22 0.0055 34 0.0000 11 0.0000 23 0.0055 35 0.0000 12 0.0000 24 0.0055 36 0.0000

Dr. Roberto AguiarNatalia Bermeo
27
Tabla 15. Desplazamientos inelásticos obtenidos.
DESPLAZAMIENTO INELÁSTICO
VALOR (m)
DESPLAZAMIENTO INELÁSTICO
VALOR(m)
DESPLAZAMIENTO INELÁSTICO
VALOR(m)
1 0.0000 13 0.0222 25 0.0000 2 0.0000 14 0.0222 26 0.0000 3 0.0000 15 0.0222 27 0.0000 4 0.0001 16 0.0222 28 0.0000 5 0.0000 17 0.2127 29 0.0000 6 0.0001 18 0.2127 30 0.0005 7 0.0001 19 0.2127 31 0.0005 8 0.0000 20 0.2127 32 0.0000 9 0.0001 21 0.0222 33 0.0000 10 0.0000 22 0.0222 34 0.0000 11 0.0000 23 0.0222 35 0.0000 12 0.0000 24 0.0222 36 0.0000
Deriva Global
21.27450 . %
Fuerzas Laterales
Tabla 16. Fuerzas laterales obtenidas.
FUERZA LATERAL
VALOR (T)
FUERZA LATERAL
VALOR (T)
FUERZA LATERAL
VALOR (T)
1 0.0000 13 0.0531 25 0.0000 2 0.0000 14 0.0762 26 0.0000 3 0.0000 15 0.0762 27 0.0000 4 0.0000 16 0.0531 28 0.0000 5 0.0000 17 0.0655 29 0.0000 6 0.0000 18 0.1013 30 0.0004 7 0.0000 19 0.1013 31 0.0004 8 0.0000 20 0.0655 32 0.0000 9 0.0000 21 0.0531 33 0.0000 10 0.0000 22 0.0762 34 0.0000 11 0.0000 23 0.0762 35 0.0000 12 0.0000 24 0.0531 36 0.0000
0.8516

Segundo Encuentro de Investigación
Científica desde las Aulas28
141.93
Coeficiente Sísmico
∑ 0.85163.0821
0.2763
Viga San Andrés
Figura 25. Esquema viga San Andrés y distribución fuerza puntual.
Figura 26. Numeración de nudos y elementos de la viga.
3.35 m
3.00
m
DIAGONALES 16 mm
3.35 m
3.00
m
3.35 m 3.35 m
Dr. Roberto AguiarNatalia Bermeo
29
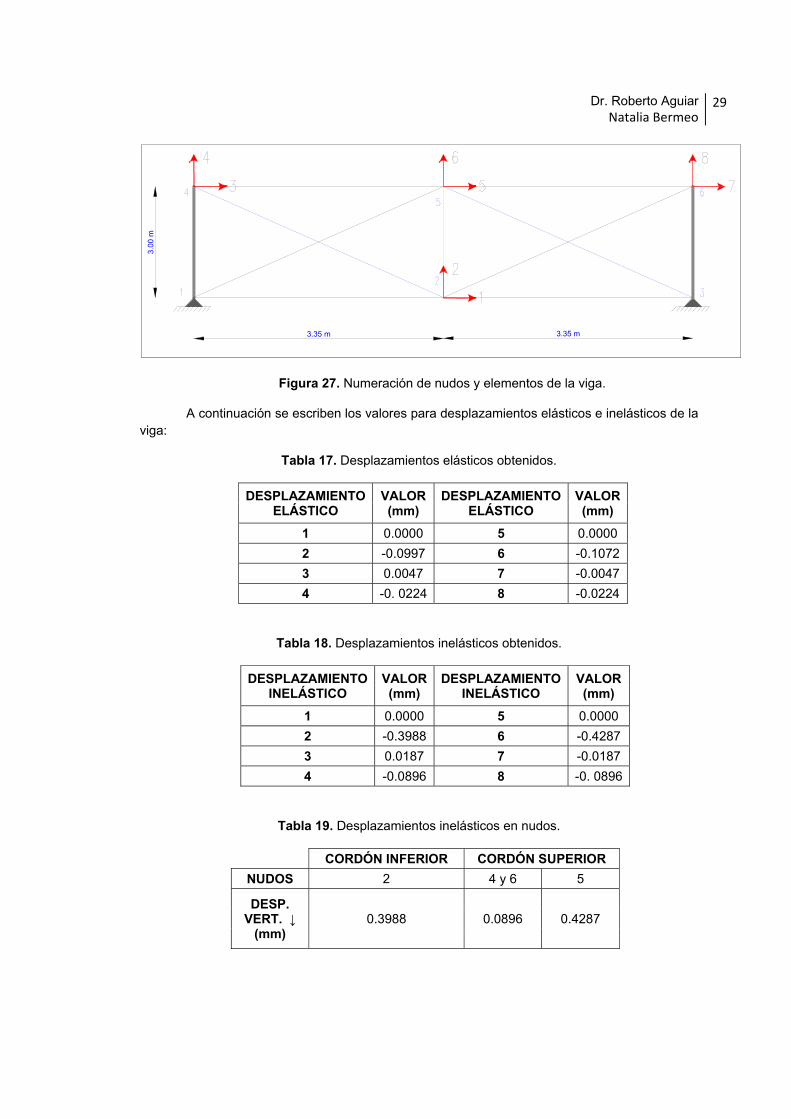
Figura 27. Numeración de nudos y elementos de la viga.
A continuación se escriben los valores para desplazamientos elásticos e inelásticos de la viga:
Tabla 17. Desplazamientos elásticos obtenidos.
DESPLAZAMIENTO ELÁSTICO
VALOR (mm)
DESPLAZAMIENTO ELÁSTICO
VALOR (mm)
1 0.0000 5 0.0000 2 -0.0997 6 -0.1072 3 0.0047 7 -0.0047 4 -0. 0224 8 -0.0224
Tabla 18. Desplazamientos inelásticos obtenidos.
DESPLAZAMIENTO INELÁSTICO
VALOR (mm)
DESPLAZAMIENTO INELÁSTICO
VALOR (mm)
1 0.0000 5 0.0000 2 -0.3988 6 -0.4287 3 0.0187 7 -0.0187 4 -0.0896 8 -0. 0896
Tabla 19. Desplazamientos inelásticos en nudos.
CORDÓN INFERIOR CORDÓN SUPERIOR NUDOS 2 4 y 6 5
DESP. VERT. ↓
(mm) 0.3988 0.0896 0.4287
3.00
m
3.35 m 3.35 m

Segundo Encuentro de Investigación
Científica desde las Aulas30
Después tenemos los valores de las fuerzas finales, en cada miembro de la viga:
Tabla 20. Fuerzas finales en miembros.
ELEMENTO NUDO INICIAL NUDO FINAL 1 170.4641 0.0000 -170.4641 0.0000 2 57.0682 0.0000 -57.0682 0.0000 3 170.4641 0.0000 -170.4641 0.0000 4 63.6031 0.0000 -63.6031 0.0000 5 -42.7721 0.0000 42.7721 0.0000 6 -42.7721 0.0000 42.7721 0.0000 7 63.6031 0.0000 -63.6031 0.0000 8 0.0000 0.0000 0.0000 0.0000 9 0.0000 0.0000 0.0000 0.0000 10 31.8631 0.0000 -31.8631 0.0000 11 31.8631 0.0000 -31.8631 0.0000
4. CONCLUSIONES:
Los problemas estructurales de las naves industriales empiezan con su diseño, dado que se realizan planteamientos en cuanto a materiales y a la conformación de los mismos que no cumplen con la normativa vigente.
Se ha podido palpar que un buen número de este tipo de construcciones no utiliza arriostramientos, lo que puede desembocar en una falla generalizada frente a eventos de gran magnitud.
El uso de arriostramientos dentro de la configuración de las naves industriales mejora notablemente el comportamiento estructural, dado que nos permiten disminuir los desplazamientos que se generan frente a eventos sísmicos.
El desplazamiento que se genera en la estructura, depende directamente de la cantidad, distribución y del tipo material que conforman los arriostramientos.
Los desplazamientos obtenidos con la viga San Andrés, en la primera opción son menores en un 21%, a los obtenidos en la segunda opción, tomando como referencia el nudo del cumbrero.
Para alcanzar el mismo valor de desplazamiento en el punto de referencia (cumbrero) se deben tomar en cuenta la participación de las diagonales en el primer modelo.
En los dos modelos de viga San Andrés, se puede apreciar valores muy bajos de desplazamientos, debido a que se rigidiza ampliamente la estructura.

Dr. Roberto AguiarNatalia Bermeo
31
5. REFERENCIAS:
Aguiar R., (2004), Análisis matricial de Estructuras, Centro de Investigaciones Científicas.
Escuela Politécnica del Ejército. Tercera Edición, 550 p., Quito. Aguiar R., (2012), Dinámica de Estructuras con CEINCI-LAB, Centro de Investigaciones
Científicas. Escuela Politécnica del Ejército. Segunda Edición, 550 p., Quito. NEC-11 (Norma ecuatoriana de la construcción 2011), “Peligro sísmico y requisitos de
diseño sismo resistente”, pág. 9-23. NEC-11 (Norma ecuatoriana de la construcción 2011), “Peligro sísmico y requisitos de
diseño sismo resistente”, pág. 35-36.
Related Documents











