VieVS User Workshop 14 – 16 September, 2011 Vienna VIE_LSM Kamil Teke and Johannes Böhm

VieVS User Workshop 14 – 16 September, 2011 Vienna VIE_LSM Kamil Teke and Johannes Böhm.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

VieVS User Workshop
14 – 16 September, 2011
Vienna
VIE_LSM
Kamil Teke and Johannes Böhm

2VieVS User Workshop 2011
Introductionvie_lsm is a module of VieVS, which estimates geodetic parameters with least squares adjustment from VLBI observations.
Estimated parameters are: quadratic polynomial coefficients of clocks (offset in cm, rate in cm/day,
and quadratic term in cm/day2) plus continuous piecewise linear offsets (CPWLO) of clocks in cm,
zenith wet delay (ZWD) CPWLO in cm, troposphere north and east gradients CPWLO in cm, Earth orientation parameters (EOP) CPWLO in mas and ms, TRF coordinates of antennas in cm (CPWLO or one offset per session), CRF coordinates of sources as CPWLO in mas.
Since, the standard deviations of observations are so small, 1 cm added before weights are formed. Weight matrix of observations is diagonal (units are in 1/cm2). Currently, no down weighting is applied due to elevation angles of the observations.

3VieVS User Workshop 2011
Introductionestimates constrained (relative or absolute) to zero with a large or a small standard deviation (loose or tight). This is due to connect the parameters which have no observation in the corresponding estimation interval.
Realistic standard deviations should be assigned to the constraints. If not then outlier observations in small number in an estimation interval will cause unrealtistic estimates.
offset(t+1) - offset(t) = 0 ± mc_rel relative constraintsExample: mc_rel = 30 mas/day Xpol CPWLO relative constraints are loose.mc_rel = 0.001 mas/day Xpol CPWLO relative constraints are tight.
offset(t) = 0 ± mc_abs absolute constraintsExample:mc_abs = 2 mm Troposphere east gradients absolute constraints are loose.mc_abs = 0.01 mm Troposphere east gradients absolute constraints are tight.

VieVS User Workshop 2011 4
Continuous piece-wise linear offset functions (CPWLO)
11 2 1
2 1
( )i
t tx x x x
t t

VieVS User Workshop 2011 5
1 1
( ) ( ) i
i
xt t
x x x
2 2
( ) ( ) i
i
xt t
x x x
1 1
1 ji
j j
t tx
x t t
2 1
ji
j j
t tx
x t t
1j jt t t
1,2x are the estimated offsets of a parameter at epochs jt and 1jt e.g. ΔUT1 is the estimated parameter at epochs 15:00 and 16:00 UTC
Partial derivatives of the delay model w.r.t. a sub-daily parameter to be estimated at consecutive epochs

VieVS User Workshop 2011 6
LS Adjustment
6
bc is a zero vector(due to NNT and NNR conditions
(1). (15).A A sm A sm
(1). 0
0 (15).
H sm
H
H sm
0
T T THA PA H P H C
NC
T TH
c
A Poc H P ochb
b
design matrix of real observation equations
design matrix of pseudo-observation equations (constraints)
x N b 0 ( ) / ( )T TH H H obs constr unkm v Pv v P v n n n
parameter vector (estimates)
0xK m N variance-covariance matrix of the estimates

VieVS User Workshop 2011 7
VLBI clock error2
0 1 0 2 0( ) ( ) ( )polyclk t t t t t quadratic polynomial for
each clock
11 2 1
2 1
( ) ( )CPWLOclk
t tt x x x
t t
CPWLO for each clock e.g. at each UTC integer hour (t1 and t2)
( ) ( ) ( )poly CPWLOclk clk clkt t t total clock error at epoch t

VieVS User Workshop 2011 8
Modeling clock breaks

VieVS User Workshop 2011 9
Troposphere delay
6
0
10 ( ) ( )tropH
trop h wN s N s ds
( , ) ( ) ( ) ( ) cot( ) cos( ) sin( )trop h w w n eZHDm ZWDm m G G
reduced from observations a priori to the adjustment
estimated estimatedestimated

VieVS User Workshop 2011 10
VIE_LSM GUIs

VieVS User Workshop 2011 11
VIE_LSM GUIs
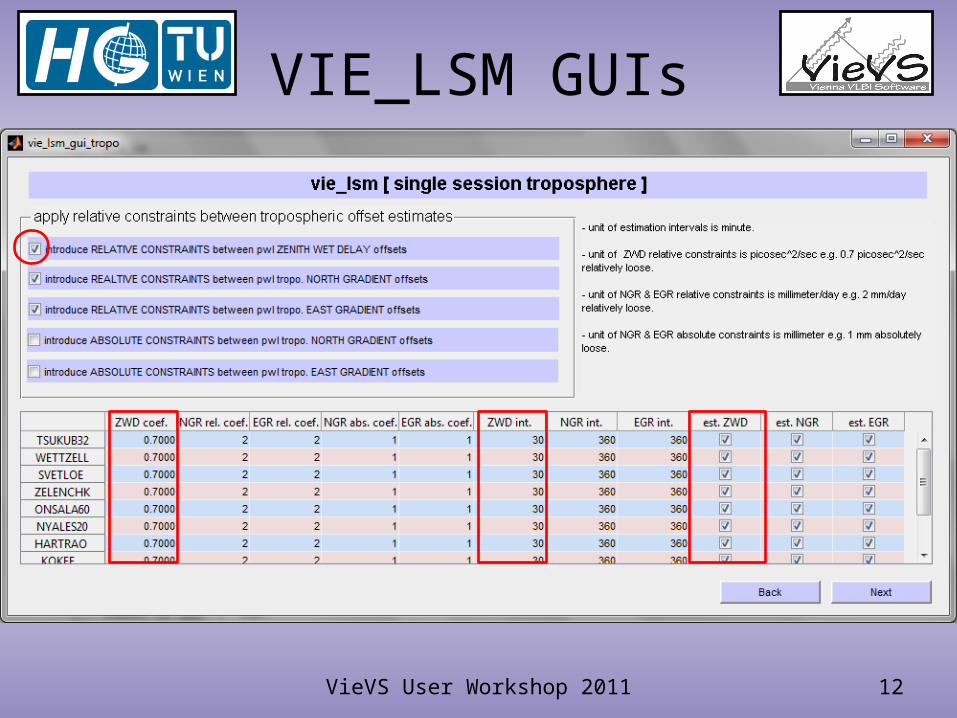
VieVS User Workshop 2011 12
VIE_LSM GUIs

VieVS User Workshop 2011 13
VIE_LSM GUIs

VieVS User Workshop 2011 14
VIE_LSM GUIs

VieVS User Workshop 2011 15
VIE_LSM GUIs

VieVS User Workshop 2011 16
VIE_LSM GUIs

VieVS User Workshop 2011 17
VIE_LSM GUIs

VieVS User Workshop 2011 18
VIE_LSM GUIs

VieVS User Workshop 2011 19
VIE_LSM GUIs

VieVS User Workshop 2011 20
VIE_LSM GUIs
Hana will talk
about this GUI

VieVS User Workshop 2011 21
Thank you so much for your attention!
Related Documents











