Robo3x-1.1 1 Property of Penn Engineering, Vijay Kumar and Ani Hsieh Video 5.1 Vijay Kumar and Ani Hsieh

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Robo3x-1.1 1Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.1Vijay Kumar and Ani Hsieh
Robo3x-1.1 2Property of Penn Engineering, Vijay Kumar and Ani Hsieh
The Purpose of Control
• Understand the “Black Box”
• Evaluate the Performance
• Change the Behavior
Output/ Response
Input/Stimulus/ Disturbance
System or Plant

Robo3x-1.1 3Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Anatomy of a Feedback Control System
Sensor
ControllerActuatorGas Pedal
OutputVehicle Speed
InputDesired Speed
Disturbance
+++-

Robo3x-1.1 4Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Twin Objectives of Control
• Performance
• Disturbance Rejection

Robo3x-1.1 5Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Learning Objectives for this Week
• Linear Control
• Modeling in the frequency domain
• Transfer Functions
• Feedback and Feedforward Control

Robo3x-1.1 6Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Frequency Domain Modeling
• Algebraic vs Differential Equations
• Laplace Transforms
• Diagrams

Robo3x-1.1 7Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Laplace Transforms
Integral Transform that maps functions from the time domain to the frequency domain
with

Robo3x-1.1 8Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Example
Let , compute

Robo3x-1.1 9Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Inverse Laplace Transforms
Integral Transform that maps functions from the frequency domain to the time domain

Robo3x-1.1 10Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Example
Let , compute

Robo3x-1.1 11Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Laplace Transform Tables
http://integral-table.com/downloads/LaplaceTable.pdf

Robo3x-1.1 12Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.2Vijay Kumar and Ani Hsieh

Robo3x-1.1 13Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Generalizing
Given
How do we obtain ?
Robo3x-1.1 14Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Partial Fraction Expansion
Case 1: Roots of D(s) are Real & Distinct
Case 2: Roots of D(s) are Real & Repeated
Case 3: Roots of D(s) are Complex or Imaginary

Robo3x-1.1 15Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 1: Roots of D(s) are Real & Distinct
Compute the Inverse Laplace of

Robo3x-1.1 16Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 2: Roots of D(s) are Real & Repeated
Compute the Inverse Laplace of

Robo3x-1.1 17Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 3: Roots of D(s) are Complex
Compute the Inverse Laplace of

Robo3x-1.1 18Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.3Vijay Kumar and Ani Hsieh

Robo3x-1.1 19Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Using Laplace Transforms
Given
➢ Solving for x(t)1. Convert to frequency domain
2. Solve algebraic equation
3. Convert back to time domain

Robo3x-1.1 20Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Properties of Laplace Transforms

Robo3x-1.1 21Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Summary
Laplace Transforms
• time domain <-> frequency domain
• differential equation <-> algebraic equation
• Partial Fraction Expansion factorizes “complicated” expressions to simplify computation of inverse Laplace Transforms

Robo3x-1.1 22Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Example: Solving an ODE (1)
Given with
, and .
Solve for .

Robo3x-1.1 23Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Example: Solving an ODE (2)

Robo3x-1.1 24Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.4Vijay Kumar and Ani Hsieh

Robo3x-1.1 25Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Controller Design
OutputInput
Disturbance
++Input +- Controller

Robo3x-1.1 26Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Controller Design
Output
Disturbance
++Input +-
Controller

Robo3x-1.1 27Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Controller Design
OutputInput
Disturbance
+++- Controller
System

Robo3x-1.1 28Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Controller Design
Controller OutputInput
Disturbance
+++-
System

Robo3x-1.1 29Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Transfer Function
Relate a system’s output to its input1.Easy separation of INPUT, OUTPUT,
SYSTEM (PLANT)
2.Algebraic relationships (vs. differential)
3.Easy interconnection of subsystems in a MATHEMATICAL framework
Robo3x-1.1 30Property of Penn Engineering, Vijay Kumar and Ani Hsieh
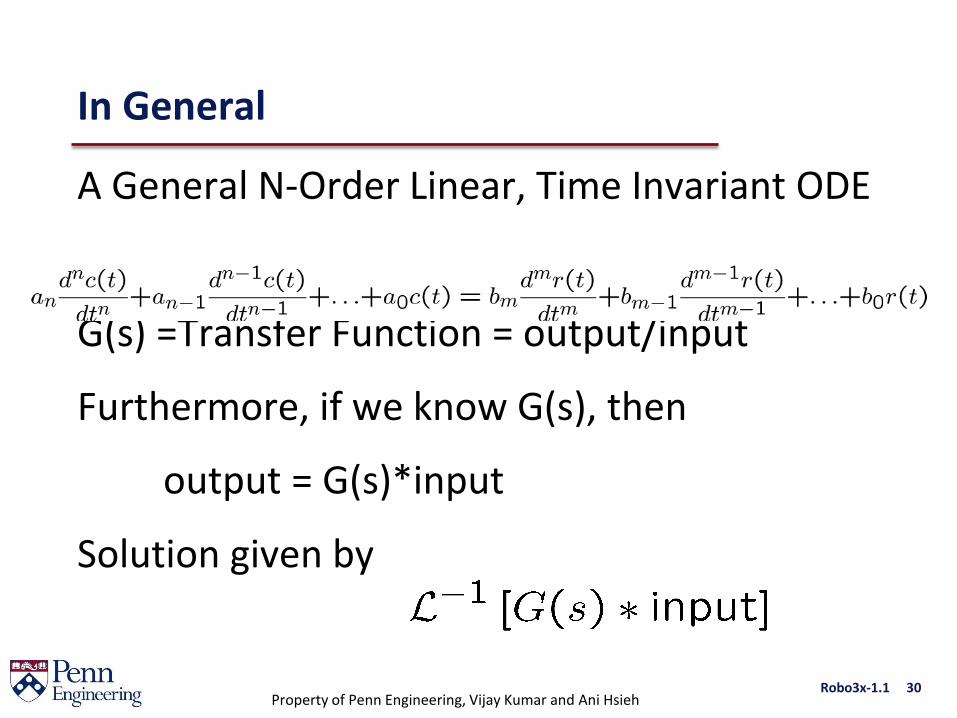
In General
A General N-Order Linear, Time Invariant ODE
G(s) =Transfer Function = output/input
Furthermore, if we know G(s), then
output = G(s)*input
Solution given by

Robo3x-1.1 31Property of Penn Engineering, Vijay Kumar and Ani Hsieh
General Procedure
Given and desired performance criteria
1. Convert
2. Analyze
3. Design using
4. Validate using
5. Iterate

Robo3x-1.1 32Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Underlying Assumptions
Linearity1. Superposition
2. Homogeneity
System
System
B/c the Laplace
Transform is Linear!

Robo3x-1.1 33Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.5Vijay Kumar and Ani Hsieh

Robo3x-1.1 34Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Characterizing System Response
Given
How do we characterize the performance of a system?
• Special Case 1: 1st Order Systems
• Special Case 2: 2nd Order Systems

Robo3x-1.1 35Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Poles and Zeros
Given
Poles
Zeros
Example:

Robo3x-1.1 36Property of Penn Engineering, Vijay Kumar and Ani Hsieh
First Order Systems
In general
Let U(s) = 1/s, then
As such,
Therefore,

Robo3x-1.1 37Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Characterizing First Order Systems
Given with U(s) = 1/s

Robo3x-1.1 38Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Characterizing First Order Systems
Time Constant –
Rise Time –
Settling Time –

Robo3x-1.1 39Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Second Order Systems
Given, and U(s) = 1/s
Possible Cases1. r1 & r2 are real & distinct2. r1 & r2 are real & repeated3. r1 & r2 are both imaginary4. r1 & r2 are complex conjugates

Robo3x-1.1 40Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 1: Real & Distinct Roots
Overdamped response
Robo3x-1.1 41Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.6Vijay Kumar and Ani Hsieh

Robo3x-1.1 42Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 2: Real & Repeated Roots
Critically damped response
Robo3x-1.1 43Property of Penn Engineering, Vijay Kumar and Ani Hsieh
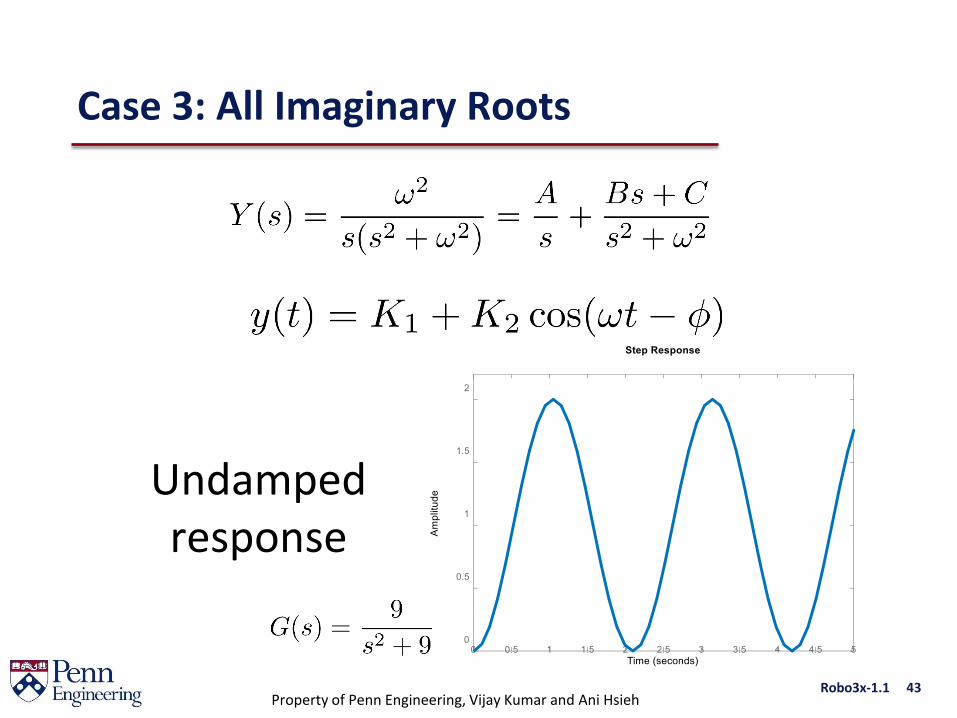
Case 3: All Imaginary Roots
Undamped response

Robo3x-1.1 44Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Case 4: Roots Are Complex
Underdamped response

Robo3x-1.1 45Property of Penn Engineering, Vijay Kumar and Ani Hsieh
A Closer Look at Case 4
Exponential Decay(Real Part)
Sinusoidal Oscillations(Imaginary Part)

Robo3x-1.1 46Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Summary of 2nd Order Systems
Given, and U(s) = 1/s
Solution is one of the following:
1. Overdamped: r1 & r2 are real & distinct
2. Critically Damped: r1 & r2 are real & repeated
3. Undamped: r1 & r2 are both imaginary
4. Underdamped: r1 & r2 are complex conjugates
Robo3x-1.1 47Property of Penn Engineering, Vijay Kumar and Ani Hsieh
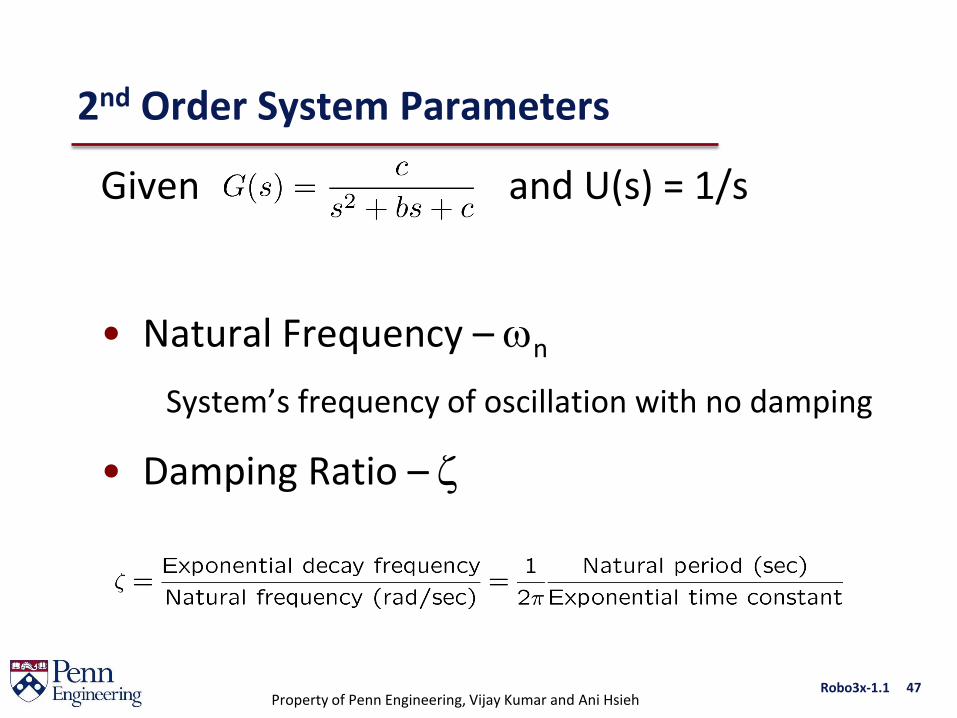
2nd Order System Parameters
Given and U(s) = 1/s
• Natural Frequency – n
System’s frequency of oscillation with no damping
• Damping Ratio –

Robo3x-1.1 48Property of Penn Engineering, Vijay Kumar and Ani Hsieh
General 2nd Order System
Given and U(s) = 1/s
• When b = 0
• For an underdamped system

Robo3x-1.1 49Property of Penn Engineering, Vijay Kumar and Ani Hsieh
General 2nd Order Systems
Second-order system transfer functions have the form
with poles of the form
Example: For
Compute , n, and s1,2?

Robo3x-1.1 50Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.7Vijay Kumar and Ani Hsieh
Robo3x-1.1 51Property of Penn Engineering, Vijay Kumar and Ani Hsieh
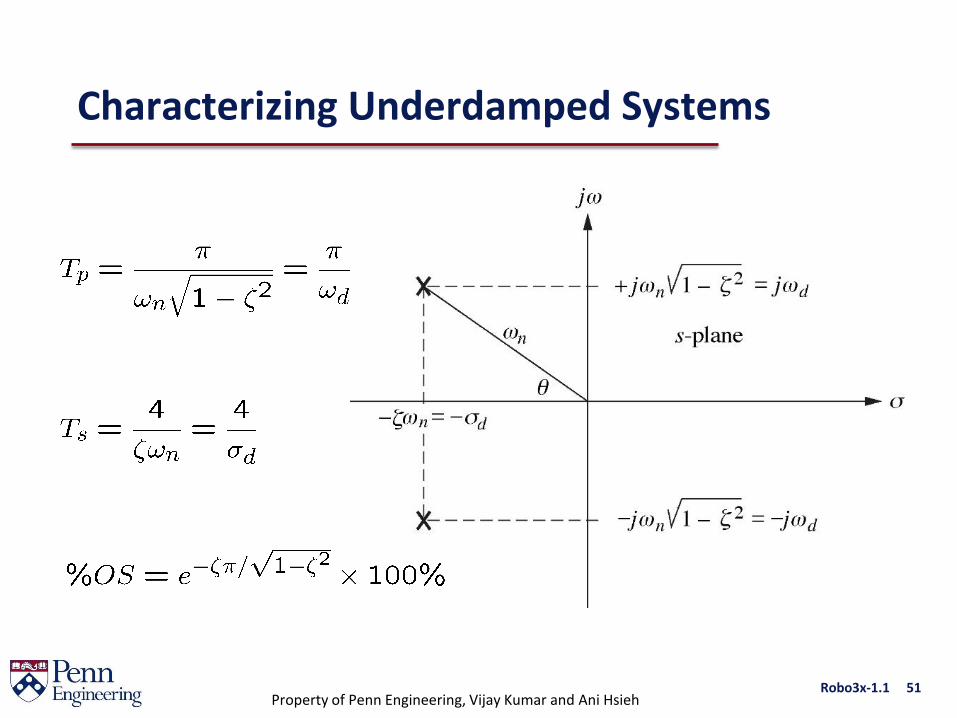
Characterizing Underdamped Systems

Robo3x-1.1 52Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Peak Time
123
321
Same Envelope
32
1
Motion of
poles

Robo3x-1.1 53Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Settling Time
2 1Same Frequency
Motion of
poles
1
2
2 1

Robo3x-1.1 54Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Overshoot
Motion of
poles
1
12
23
3
Same Overshoot
12
3

Robo3x-1.1 55Property of Penn Engineering, Vijay Kumar and Ani Hsieh
In Summary
s-plane

Robo3x-1.1 56Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.8Vijay Kumar and Ani Hsieh

Robo3x-1.1 57Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Independent Joint Control
In general,
n-Link Robot Arm generally has ≥ nactuators
Single Input Single Output (SISO)
Single joint control

Robo3x-1.1 58Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Permanent Magnet DC Motor
• Picture Here
Basic Principle
Source: Wikimedia Commons

Robo3x-1.1 59Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Electrical Part
Armature Current
Back EMF
Motor Torque
Torque Constant

Robo3x-1.1 60Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Mechanical Part
Actuator DynamicsGear ratio

Robo3x-1.1 61Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Combining the Two
Correction: the Kb terms should be Km

Robo3x-1.1 62Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Two SISO Outcomes
Input Voltage – Motor Shaft Position
Load Torque – Motor Shaft Position

Robo3x-1.1 63Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.9Vijay Kumar and Ani Hsieh

Robo3x-1.1 64Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Two SISO Outcomes
Input Voltage – Motor Shaft Position
Load Torque – Motor Shaft Position
Assumption: L/R << Jm/Bm

Robo3x-1.1 65Property of Penn Engineering, Vijay Kumar and Ani Hsieh
2nd Order Approximation
Divide by R and set L/R = 0
In the time domain
Robo3x-1.1 66Property of Penn Engineering, Vijay Kumar and Ani Hsieh
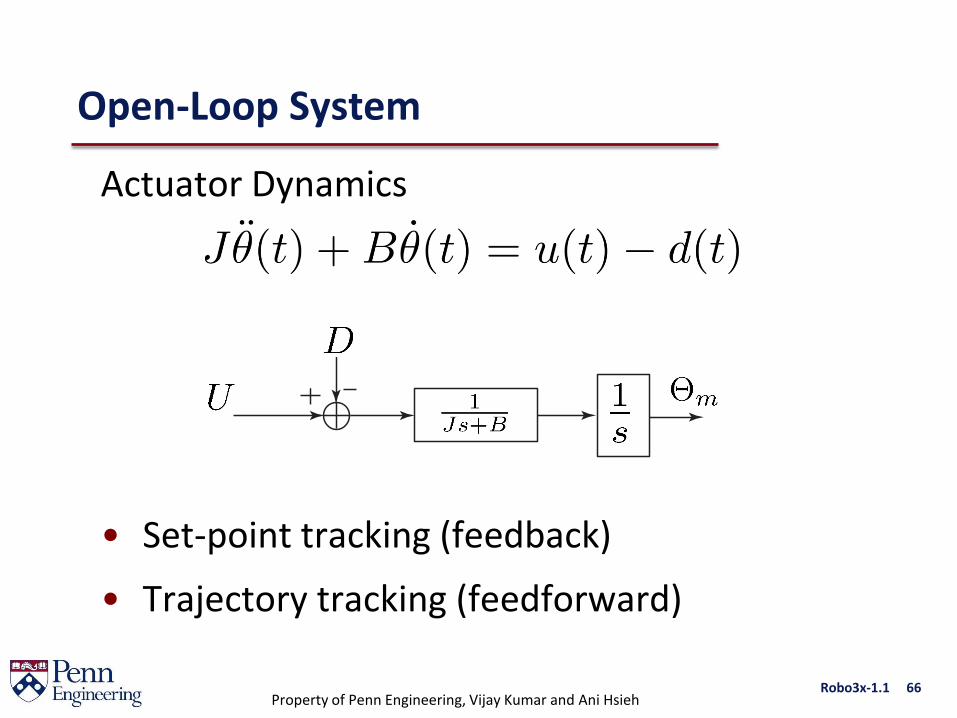
Open-Loop System
Actuator Dynamics
• Set-point tracking (feedback)• Trajectory tracking (feedforward)

Robo3x-1.1 67Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Our Control Objectives
• Motion sequence of end-effector positions and orientations (EE poses)
• EE poses Joint Angles Motor Commands
• Transfer function
• Three primary linear controller designs:• P (proportional)• PD (proportional-derivative)• PID (proportional-integral-derivative)

Robo3x-1.1 68Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Set-Point Tracking
The Basic PID Controller

Robo3x-1.1 69Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Proportional (P) Control
• Control input proportional to error
• KP – controller gain
• Error is amplified by KP to obtain the desired output signal

Robo3x-1.1 70Property of Penn Engineering, Vijay Kumar and Ani Hsieh
P Control of Vehicle Speed
Example: Cruise Control
Desired linear speed
Control input proportional to error
X
Y
q
v
vehicle wheel speed
Robo3x-1.1 71Property of Penn Engineering, Vijay Kumar and Ani Hsieh
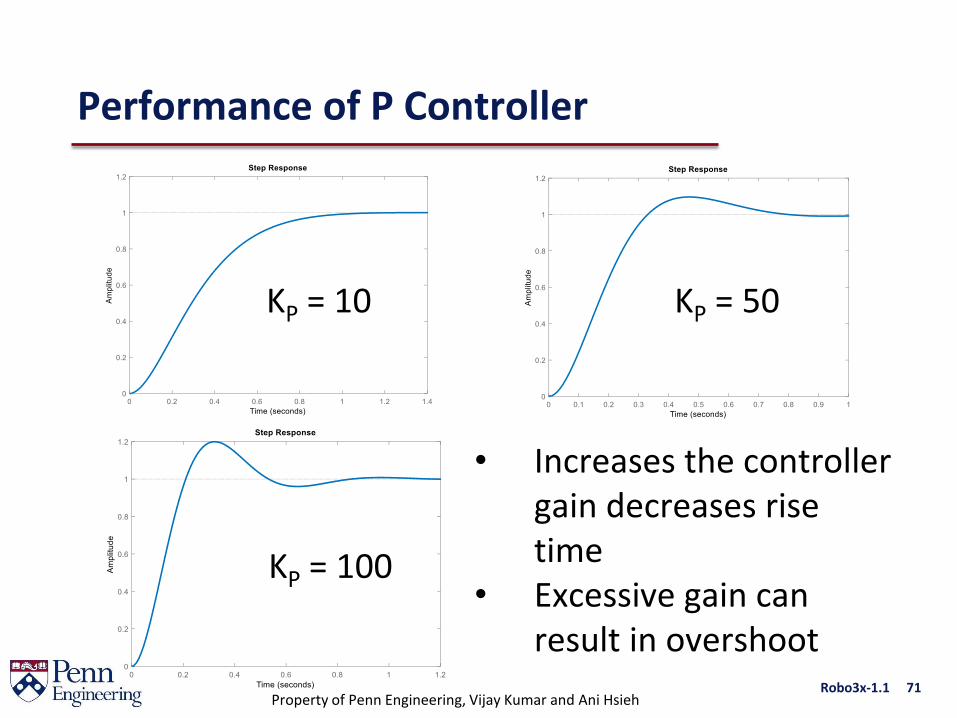
Performance of P Controller
KP = 10 KP = 50
• Increases the controller gain decreases rise time
• Excessive gain can result in overshoot
KP = 100

Robo3x-1.1 72Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.10Vijay Kumar and Ani Hsieh

Robo3x-1.1 73Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Proportional-Derivative (PD) Control
• Control input proportional to error AND 1st
derivative of error
• Including rate of change of error helps mitigates oscillations

Robo3x-1.1 74Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Performance of PD Controller
KP = 10KD = 1
KP = 10KD = 3
Decreases rise time
KP = 500KD = 10
KP = 500KD = 50
Reduces overshoot & Settling
Time

Robo3x-1.1 75Property of Penn Engineering, Vijay Kumar and Ani Hsieh
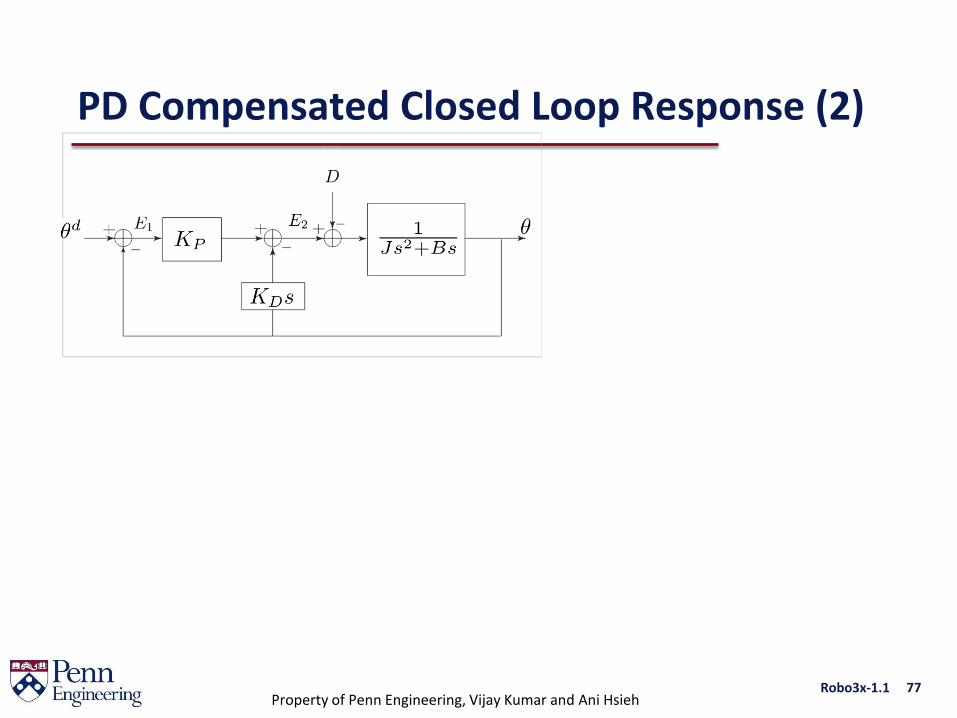
PD Control of a Joint
Closed loop system given by
w/

Robo3x-1.1 76Property of Penn Engineering, Vijay Kumar and Ani Hsieh
PD Compensated Closed Loop Response (1)
Robo3x-1.1 77Property of Penn Engineering, Vijay Kumar and Ani Hsieh
PD Compensated Closed Loop Response (2)

Robo3x-1.1 78Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Picking KP and KD
Closed loop system
w/
Design Guidelines
• Critically damped w/
• Pick and

Robo3x-1.1 79Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Performance of the PD Controller
Assuming and
Tracking error is given by
At steady-state

Robo3x-1.1 80Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.11Vijay Kumar and Ani Hsieh

Robo3x-1.1 81Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Proportional-Integral-Derivative (PID) Controller
• Control input proportional to error, 1st
derivative AND an integral of the error
• The integral term offsets any steady-state errors in the system

Robo3x-1.1 82Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Performance of PID Controller
KP = 10KD = 3
KP = 10KD = 3KI = 1
KP = 10KD = 3KI = 50
• Eliminates SS-Error• Increases overshoot &
settling time

Robo3x-1.1 83Property of Penn Engineering, Vijay Kumar and Ani Hsieh
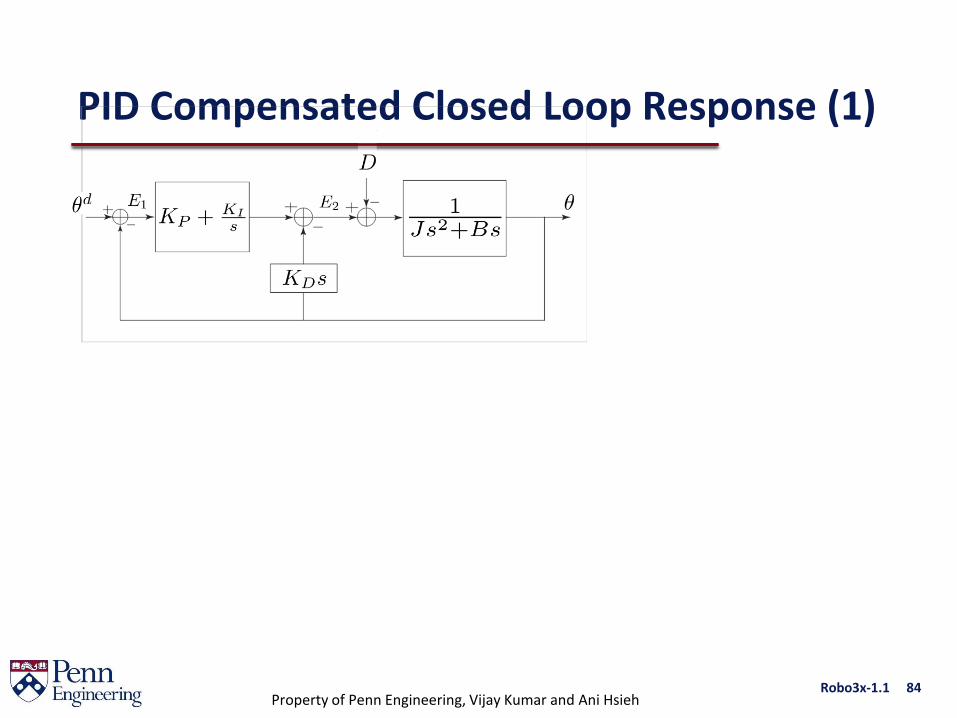
PID Control of a Joint
Closed-loop system is given by
w/
Robo3x-1.1 84Property of Penn Engineering, Vijay Kumar and Ani Hsieh
PID Compensated Closed Loop Response (1)

Robo3x-1.1 85Property of Penn Engineering, Vijay Kumar and Ani Hsieh
PID Compensated Closed Loop Response (2)

Robo3x-1.1 86Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Picking KP, KD, and KI
Closed loop system
w/
Design Guidelines
• System stable if KP, KD, and KI >0
•
• Set KI = 0 and pick KP, KD, then go back to pick KI w/ in mind
Robo3x-1.1 87Property of Penn Engineering, Vijay Kumar and Ani Hsieh
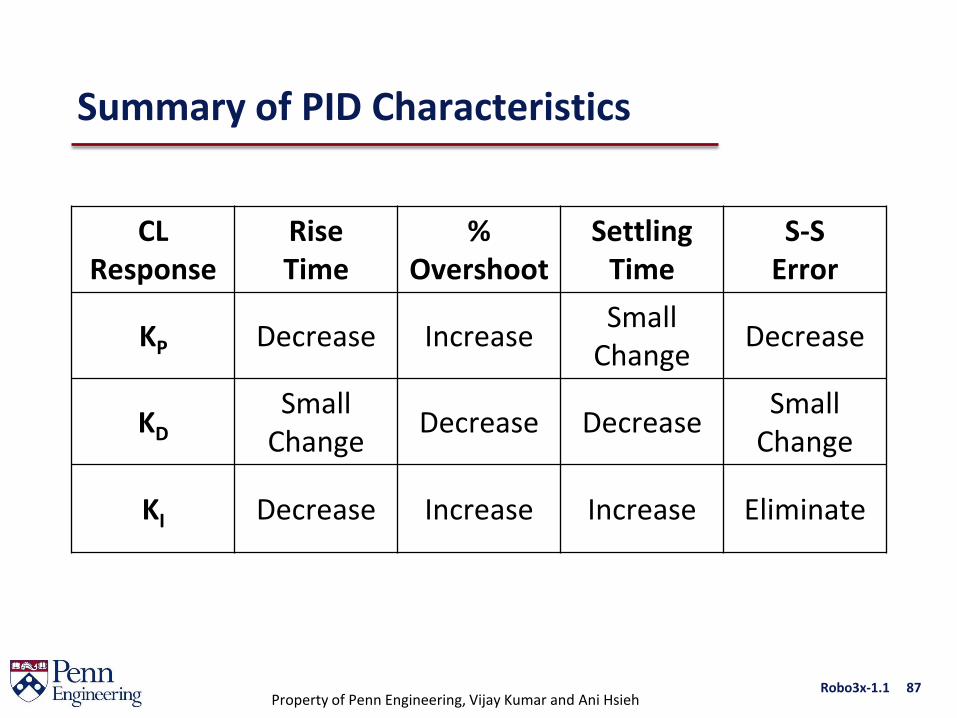
Summary of PID Characteristics
CLResponse
RiseTime
%Overshoot
SettlingTime
S-SError
KP Decrease Increase Small Change Decrease
KDSmall
Change Decrease Decrease Small Change
KI Decrease Increase Increase Eliminate

Robo3x-1.1 88Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Tuning Gains
• Appropriate gain selection is crucial for optimal controller performance
• Analytically (R-Locus, Frequency Design, Ziegler Nichols, etc)
• Empirically
• The case for experimental validation• Model fidelity
• Optimize for specific hardware
• Saturation and flexibility

Robo3x-1.1 89Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Feedforward Control
• Motion sequence of end-effector positions and orientations (EE poses)
• What if instead of , we want ?
Robo3x-1.1 90Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 5.12Vijay Kumar and Ani Hsieh

Robo3x-1.1 91Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Closed Loop Transfer Function (1)

Robo3x-1.1 92Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Closed Loop Transfer Function (2)
Robo3x-1.1 93Property of Penn Engineering, Vijay Kumar and Ani Hsieh
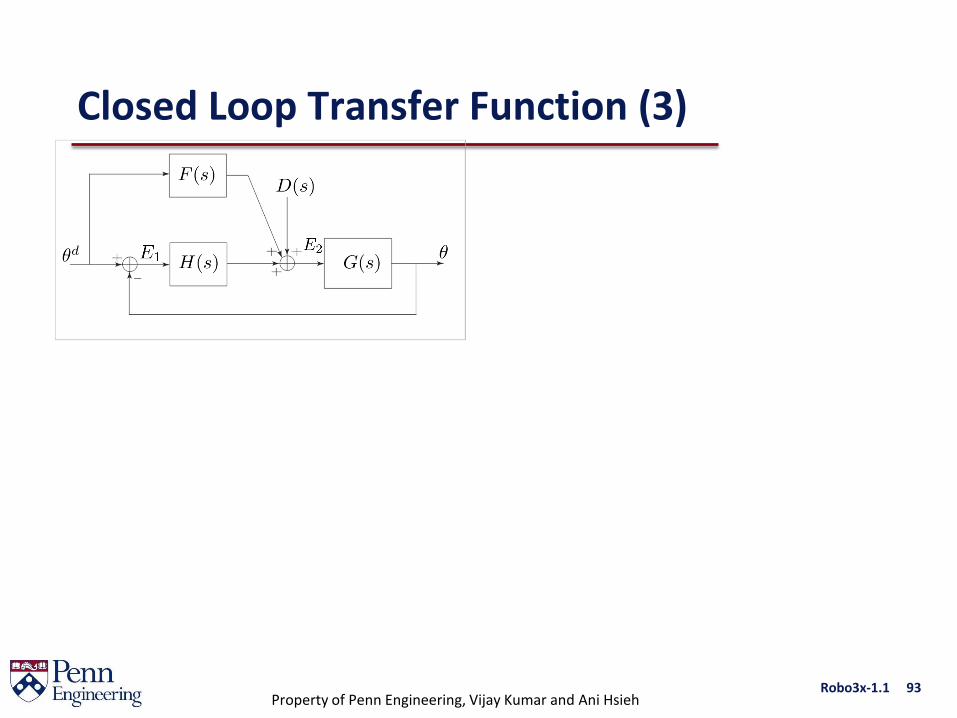
Closed Loop Transfer Function (3)

Robo3x-1.1 94Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Picking F(s)
Closed loop transfer function given by
Behavior of closed loop response, given by roots of
H(s) and F(s) be chosen so that
Robo3x-1.1 95Property of Penn Engineering, Vijay Kumar and Ani Hsieh
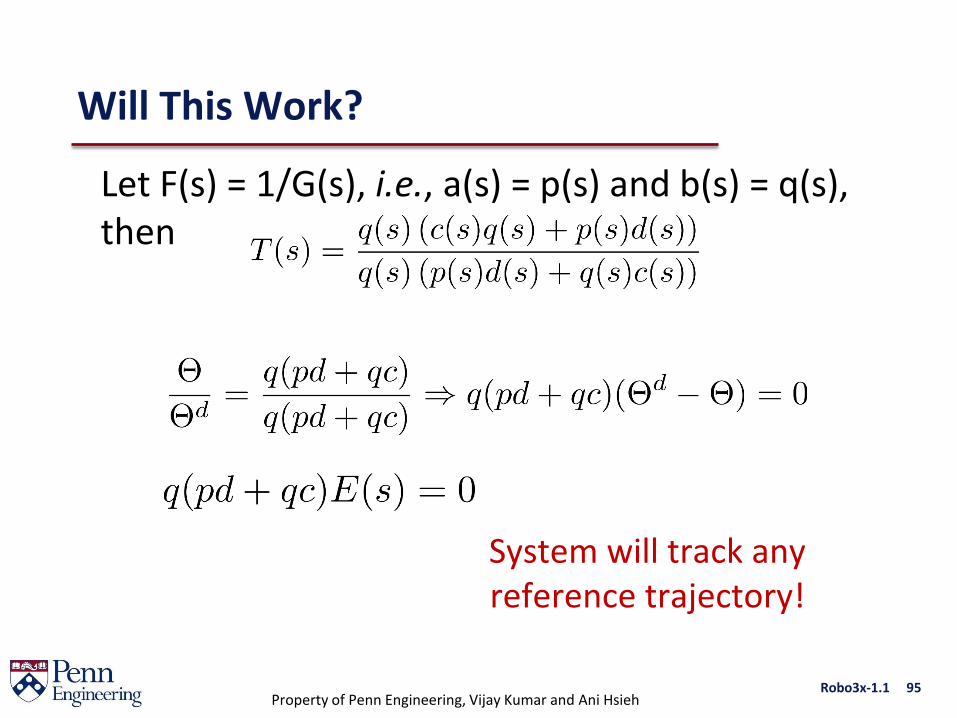
Will This Work?
Let F(s) = 1/G(s), i.e., a(s) = p(s) and b(s) = q(s), then
System will track any reference trajectory!

Robo3x-1.1 96Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Caveats – Minimum Phase Systems
Picking F(s) = 1/G(s), leads to
• Assume system w/o FF loop is stable
• By picking F(s) = 1/G(s), we require numerator of G(s) to be Hurwitz (or
)• Systems whose numerators have roots with
negative real parts are called Minimum Phase

Robo3x-1.1 97Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Feedforward Control w/ Disturbance
Assume: D(s) = constant w/
Pick F(s) = 1/G(s) =
Note the following:

Robo3x-1.1 98Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Tracking Error
Control law in time domain
System dynamics w/ control + disturbance

Robo3x-1.1 99Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Overall Performance
Related Documents











