Vapor compression refrigeration cycle for electronics cooling – Part II: gain-scheduling control for critical heat flux avoidance Juan Catano a,⇑ , Fernando Lizarralde b , Tiejun Zhang c , John T. Wen d,e,f , Michael K. Jensen d , Yoav Peles d a Emerson Climate Technologies, Inc., 1675 West Campbell Road, Sidney, OH 45365, USA b Dept. of Electrical Engineering, Federal University of Rio Janeiro, P.O. Box 68504, Rio de Janeiro, 21945/970 RJ, Brazil c Mechanical Engineering Program, Masdar Institute of Science and Technology, P.O. Box 54224, Abu Dhabi, UAE d Dept. of Mechanical, Aerospace, & Nuclear Engineering, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USA e Dept. of Electrical, Computer, & Systems Engineering, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USA f Center for Automation Technologies and Systems, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USA article info Article history: Received 20 August 2012 Received in revised form 13 March 2013 Accepted 29 June 2013 Available online xxxx Keywords: Vapor compression cycle Electronics cooling Critical heat flux Feedback control Gain-scheduling control abstract This paper addresses the feedback control of a vapor compression cycle for electronics cooling at different operating conditions including near the critical heat flux (CHF) condition. The control objective is to maintain the temperature of the heated wall below a safe threshold during large transient heat loads. The lumped-parameter model developed for this system is used to design the control strategy. Our exper- imental testbed is used for evaluation and validation. Linear controller design is applied based on the lin- earization about specific operating points. The controllers are tuned to achieve good robustness margins to guard against nonlinearity and other modeling errors. When the system traverses through multiple operating points, a gain-scheduling approach is used to switch between the controllers. For heat load changes which would lead to CHF, a dual-input gain-scheduling controller, using both expansion valve and compressor speed, is designed using the evaporator wall temperature as the feedback variable as well as the scheduling variable. Comparison between open-loop and closed-loop experiments for the same operating conditions shows that a 80 °C rise in the wall temperature is avoided with the gain- scheduling controller. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction Vapor compression cycles (VCC) are a promising solution for cooling high-heat-flux electronic systems [1–5]. Among their attractions are high heat transfer coefficients achieved through two-phase boiling, low temperatures of the cooling fluid, and the possibility to cool multiple heat sources using a single refrigeration loop. There are also concerns, however, including increased cost, condensate build-up, and the need for systems level control to bal- ance efficiency and performance [6]. Control of the flow conditions at the exit of the evaporator is considered a requirement for VCC to be a practical solution to electronic cooling [7–9]. Most of the re- search for high-heat-flux electronics cooling focuses on enhancing the heat transfer coefficient at the device level. Less attention has been given to maintaining high heat transfer coefficients during transient operation and the efficient removal of heat at the systems level. Some control-theoretic analysis of VCCs for traditional cooling systems, e.g., air conditioning and chillers, has emerged over the past decade [10–14], but application to high transient heat flux situation is still lacking. In contrast to traditional VCCs, VCC for electronics cooling faces imposed heat flux as the boundary condition at the evaporator as opposed to an imposed inlet temperature difference. For the for- mer reaching the critical heat flux (CHF) condition could cause large and sudden rise in temperature leading to device burnout. The boiling process in the evaporator achieves high heat transfer coefficient, however, when the imposed heat flux reaches the CHF, liquid is replaced by vapor at the heated interface resulting in a sudden and severe drop in heat transfer coefficient [15]. To avoid such catastrophic situation, the exit of the evaporator must be maintained in the two-phase (liquid–vapor) regime. Therefore, the addition of a heated accumulator or other type of system mod- ification is needed to protect the compressor. The control objective for traditional VCCs involves increasing efficiency by controlling the degree of superheat or maintaining the temperature of the secondary fluid in the evaporator within specified limits [16,14,12]. For electronic cooling, the control objective involves regulating the temperature of the electronic de- vice [17,4] while satisfying constraints such as the CHF avoidance in the evaporators. This paper presents a gain-scheduling approach 0017-9310/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.ijheatmasstransfer.2013.06.074 ⇑ Corresponding author. Tel.: +1 937 494 7734; fax: +1 937 498 3342. E-mail address: [email protected] (J. Catano). International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx Contents lists available at ScienceDirect International Journal of Heat and Mass Transfer journal homepage: www.elsevier.com/locate/ijhmt Please cite this article in press as: J. Catano et al., Vapor compression refrigeration cycle for electronics cooling – Part II: gain-scheduling control for critical heat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.1016/j.ijheatmasstransfer.2013.06.074

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx
Contents lists available at ScienceDirect
International Journal of Heat and Mass Transfer
journal homepage: www.elsevier .com/locate / i jhmt
Vapor compression refrigeration cycle for electronics cooling – Part II:gain-scheduling control for critical heat flux avoidance
0017-9310/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.ijheatmasstransfer.2013.06.074
⇑ Corresponding author. Tel.: +1 937 494 7734; fax: +1 937 498 3342.E-mail address: [email protected] (J. Catano).
Please cite this article in press as: J. Catano et al., Vapor compression refrigeration cycle for electronics cooling – Part II: gain-scheduling control forheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.1016/j.ijheatmasstransfer.2013.06.074
Juan Catano a,⇑, Fernando Lizarralde b, Tiejun Zhang c, John T. Wen d,e,f, Michael K. Jensen d, Yoav Peles d
a Emerson Climate Technologies, Inc., 1675 West Campbell Road, Sidney, OH 45365, USAb Dept. of Electrical Engineering, Federal University of Rio Janeiro, P.O. Box 68504, Rio de Janeiro, 21945/970 RJ, Brazilc Mechanical Engineering Program, Masdar Institute of Science and Technology, P.O. Box 54224, Abu Dhabi, UAEd Dept. of Mechanical, Aerospace, & Nuclear Engineering, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USAe Dept. of Electrical, Computer, & Systems Engineering, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USAf Center for Automation Technologies and Systems, Rensselaer Polytechnic Institute, 110 8th Street, Troy, NY 12180, USA
a r t i c l e i n f o
Article history:Received 20 August 2012Received in revised form 13 March 2013Accepted 29 June 2013Available online xxxx
Keywords:Vapor compression cycleElectronics coolingCritical heat fluxFeedback controlGain-scheduling control
a b s t r a c t
This paper addresses the feedback control of a vapor compression cycle for electronics cooling at differentoperating conditions including near the critical heat flux (CHF) condition. The control objective is tomaintain the temperature of the heated wall below a safe threshold during large transient heat loads.The lumped-parameter model developed for this system is used to design the control strategy. Our exper-imental testbed is used for evaluation and validation. Linear controller design is applied based on the lin-earization about specific operating points. The controllers are tuned to achieve good robustness marginsto guard against nonlinearity and other modeling errors. When the system traverses through multipleoperating points, a gain-scheduling approach is used to switch between the controllers. For heat loadchanges which would lead to CHF, a dual-input gain-scheduling controller, using both expansion valveand compressor speed, is designed using the evaporator wall temperature as the feedback variable aswell as the scheduling variable. Comparison between open-loop and closed-loop experiments for thesame operating conditions shows that a 80 �C rise in the wall temperature is avoided with the gain-scheduling controller.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Vapor compression cycles (VCC) are a promising solution forcooling high-heat-flux electronic systems [1–5]. Among theirattractions are high heat transfer coefficients achieved throughtwo-phase boiling, low temperatures of the cooling fluid, and thepossibility to cool multiple heat sources using a single refrigerationloop. There are also concerns, however, including increased cost,condensate build-up, and the need for systems level control to bal-ance efficiency and performance [6]. Control of the flow conditionsat the exit of the evaporator is considered a requirement for VCC tobe a practical solution to electronic cooling [7–9]. Most of the re-search for high-heat-flux electronics cooling focuses on enhancingthe heat transfer coefficient at the device level. Less attention hasbeen given to maintaining high heat transfer coefficients duringtransient operation and the efficient removal of heat at the systemslevel. Some control-theoretic analysis of VCCs for traditionalcooling systems, e.g., air conditioning and chillers, has emerged
over the past decade [10–14], but application to high transient heatflux situation is still lacking.
In contrast to traditional VCCs, VCC for electronics cooling facesimposed heat flux as the boundary condition at the evaporator asopposed to an imposed inlet temperature difference. For the for-mer reaching the critical heat flux (CHF) condition could causelarge and sudden rise in temperature leading to device burnout.The boiling process in the evaporator achieves high heat transfercoefficient, however, when the imposed heat flux reaches theCHF, liquid is replaced by vapor at the heated interface resultingin a sudden and severe drop in heat transfer coefficient [15]. Toavoid such catastrophic situation, the exit of the evaporator mustbe maintained in the two-phase (liquid–vapor) regime. Therefore,the addition of a heated accumulator or other type of system mod-ification is needed to protect the compressor.
The control objective for traditional VCCs involves increasingefficiency by controlling the degree of superheat or maintainingthe temperature of the secondary fluid in the evaporator withinspecified limits [16,14,12]. For electronic cooling, the controlobjective involves regulating the temperature of the electronic de-vice [17,4] while satisfying constraints such as the CHF avoidancein the evaporators. This paper presents a gain-scheduling approach
critical
2 J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx
to control a VCC operating near the CHF condition. Gain-schedulingcontrol is a popular nonlinear control strategy which uses a familyof linear models to represent a nonlinear system over its entireoperating range [18,19]. These linear models are obtained from lin-earizations of the nonlinear plant at different equilibrium points.Linear controllers are designed for these linear systems and arecombined by using a ‘‘scheduling’’ variable [20]. These controllersare tuned to ensure good robustness margins (gain and phase mar-gins) for nonlinearity and other model errors. We choose gain-scheduling control for CHF avoidance under varying heat loadsdue to its simplicity and ability to deal with nonlinearity. Morecomplex methods such as model predictive control [21,22] are alsoviable candidates, but tuning such controllers for robustness isgenerally much more challenging. In our context, we considertwo operating regimes: away from CHF where the control objectivemay be systems efficiency or temperature regulation as describedin [23], and near CHF where the control objective should be CHFavoidance through reduction of evaporator exit quality, possiblyat the sacrifice of efficiency. As the evaporator wall temperaturewill rise when the system approaches the CHF condition, we willuse this variable as the scheduling variable. We apply both
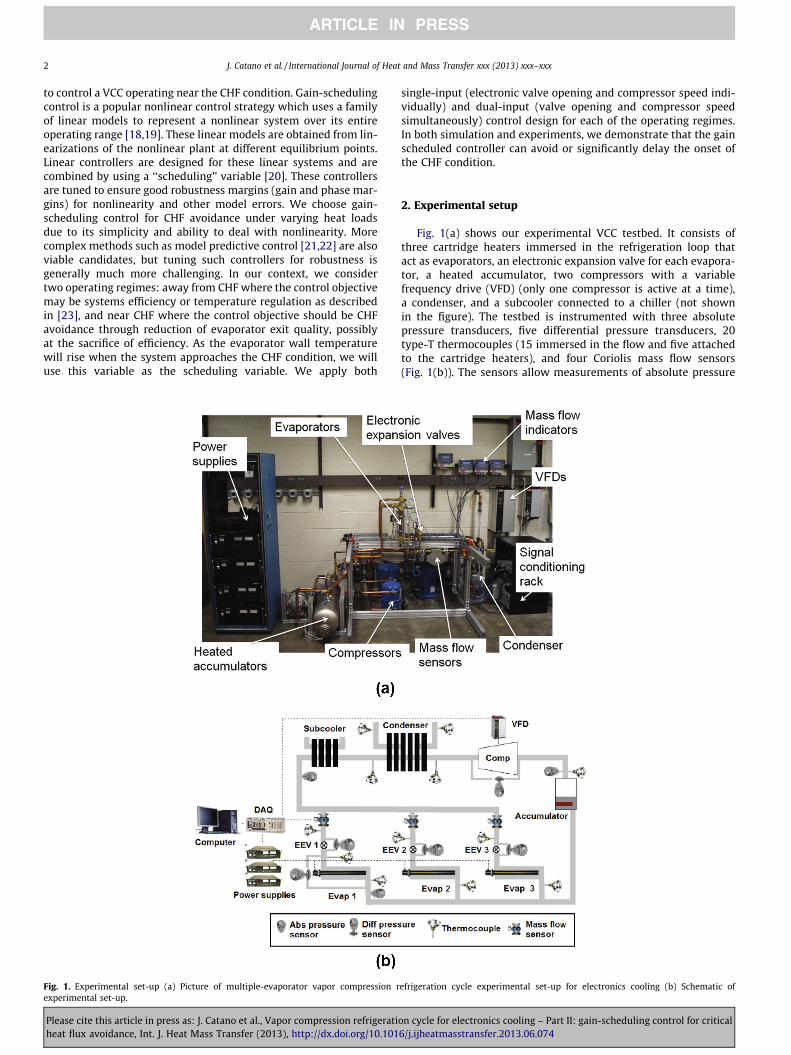
Fig. 1. Experimental set-up (a) Picture of multiple-evaporator vapor compression rexperimental set-up.
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
single-input (electronic valve opening and compressor speed indi-vidually) and dual-input (valve opening and compressor speedsimultaneously) control design for each of the operating regimes.In both simulation and experiments, we demonstrate that the gainscheduled controller can avoid or significantly delay the onset ofthe CHF condition.
2. Experimental setup
Fig. 1(a) shows our experimental VCC testbed. It consists ofthree cartridge heaters immersed in the refrigeration loop thatact as evaporators, an electronic expansion valve for each evapora-tor, a heated accumulator, two compressors with a variablefrequency drive (VFD) (only one compressor is active at a time),a condenser, and a subcooler connected to a chiller (not shownin the figure). The testbed is instrumented with three absolutepressure transducers, five differential pressure transducers, 20type-T thermocouples (15 immersed in the flow and five attachedto the cartridge heaters), and four Coriolis mass flow sensors(Fig. 1(b)). The sensors allow measurements of absolute pressure
efrigeration cycle experimental set-up for electronics cooling (b) Schematic of
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074

J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx 3
and temperature at the inlet and outlet of each main component(compressor, condenser, expansion valves, and evaporators). Theaccuracy of the temperature, pressure, and mass flow rate are±0.3 �C, ±0.3 % full scale, ±2 % of measurement, respectively. Thecontrol variables used for feedback control are the compressor fre-quency, x, and expansion valve opening, Av. The evaporator heatload, qe, accumulator heat load, qa, mass flow rate of the coolingwater in the condenser, and temperature of the chiller may all beadjusted to simulate different operating conditions. Additional de-tails of the experimental setup may be found in [23].
Fig. 2. SISO controller with valve opening control only.
3. Feedback control
Excessive temperature rise could lead to poor performance ordamage of high power electronics components [24,17]. Therefore,our primary control objective is to maintain the evaporator walltemperature, Twe, at a specified setpoint in the presence of heatload disturbances. Other system outputs that may be used as thefeedback variable include flow temperature at the evaporator exit,Te, mass flow rate, _m, and the evaporator wall heat transfer coeffi-cient, He. As described in [25], the transfer function from Av to Te
undergoes sign change of its DC gain when the evaporator exittransitions from two-phase to superheated flow, complicating thecontrol design. It is also difficult to detect the onset of CHF usingTe since it will only show a transition at xe = 1 which is too latefor the detection of the dry-out condition. _m may be an attractiveintermediate output variable to address the nonlinear valve char-acteristics. However, it cannot be reliably measured due to flashingin the sensor, and the controller would need to rely on estimated _m[23]. Similarly, He cannot be directly measured, the controllerwould need to rely on a model based estimate.
We will first consider the controller design when CHF is not aconcern. A proportional-integral (PI) control is designed based ona linearization of the nonlinear model presented in [26]. The line-arization is performed at an equilibrium known a priori to be suf-ficiently far from the CHF condition. We will consider single-input/single-output (SISO) controller design using Av and x,respectively. Then we will apply both inputs together in a dual-in-put/single-output (DISO) design.
3.1. Linearization
The equilibrium condition for linearization is chosen as
Av ¼ 5%; x ¼ 60Hz; qe ¼ 800W; qa ¼ 300W ð1Þ
based on the nominal AHRI ratings [27] and the fact it is far fromthe CHF as predicted by the model [26]. Linearization of the nonlin-ear model at this operating point gives the following input/outputtransfer function:
DTwe ¼NvðsÞDðsÞ DAv þ
NwðsÞDðsÞ Dxþ NqðsÞ
DðsÞ Dqe ð2Þ
where
DðsÞ¼ ðsþ0:1921Þðsþ0:1729Þðsþ0:04302Þðsþ0:122Þðsþ0:004258ÞNv ðsÞ¼�0:0146ðsþ0:1899Þðsþ0:1061Þðs2þ0:02556sþ2:331�10�4ÞNwðsÞ¼�1:18�10�4ðsþ0:1911Þðsþ0:0595Þðsþ0:01099ÞNqðsÞ¼1:03�10�4ðsþ0:192Þðsþ0:171Þðsþ0:0441Þðsþ0:01163Þ:
Note that the state dimension is 6 but there is an uncontrollablemode since Pc and Pe cannot be independently controlled. The sym-bol D in front of the variables means the deviation from the equilib-rium operating condition. The open loop poles show considerableseparation indicating time scale separation of the underlying
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
dynamics (temperature evolution is much slower than vapor qual-ity and pressure dynamics).
The controllable inputs, Av and x, both have physical limits thatneed to be included in simulation and controller implementation.While there are model-based constrained optimization techniques,such as model predictive control, that could explicit address suchlimits, such methods require the complete model, and the robust-ness is more difficult to evaluate. Instead, we will apply classicallinear control design, with input saturation and anti-windup [28]to address input saturation. For Av the practical operational rangeis 4–15%, where below 4% the valve behavior is highly nonlinearand small changes in valve opening have significant effects bothin pressure drop and mass flow rate. Above 15%, the flow is chokedand changes in valve opening have negligible effects on pressuredrop or mass flow rate. The limits in compressor frequency weregiven by the manufacturer at 45 to 75 Hz.
3.2. Wall temperature control with only valve input
We first consider using the expansion valve alone to regulatethe wall temperature, i.e., using DAv as the control variable and
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074
4 J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx
Dqe as the disturbance input. Using Matlab SISO toolbox and therobust response time tuning method, the controllers is designed as
CAv ¼ �0:3811 1þ 154s
� �ð3Þ
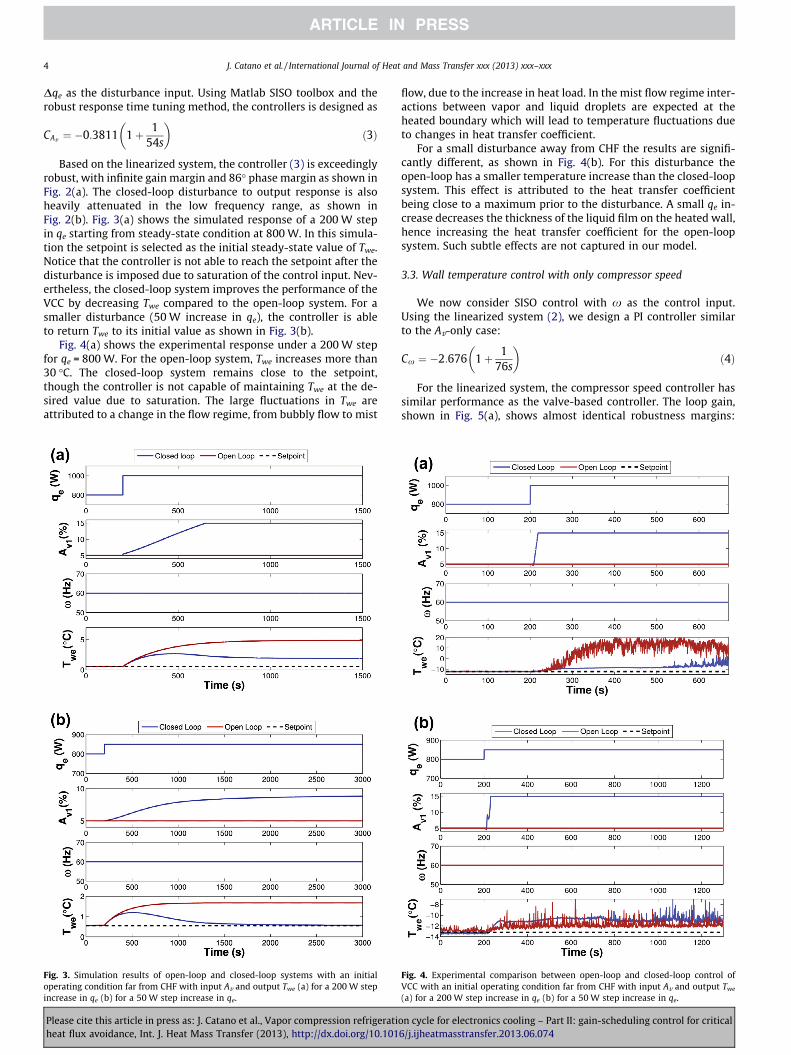
Based on the linearized system, the controller (3) is exceedinglyrobust, with infinite gain margin and 86� phase margin as shown inFig. 2(a). The closed-loop disturbance to output response is alsoheavily attenuated in the low frequency range, as shown inFig. 2(b). Fig. 3(a) shows the simulated response of a 200 W stepin qe starting from steady-state condition at 800 W. In this simula-tion the setpoint is selected as the initial steady-state value of Twe.Notice that the controller is not able to reach the setpoint after thedisturbance is imposed due to saturation of the control input. Nev-ertheless, the closed-loop system improves the performance of theVCC by decreasing Twe compared to the open-loop system. For asmaller disturbance (50 W increase in qe), the controller is ableto return Twe to its initial value as shown in Fig. 3(b).
Fig. 4(a) shows the experimental response under a 200 W stepfor qe = 800 W. For the open-loop system, Twe increases more than30 �C. The closed-loop system remains close to the setpoint,though the controller is not capable of maintaining Twe at the de-sired value due to saturation. The large fluctuations in Twe areattributed to a change in the flow regime, from bubbly flow to mist
Fig. 3. Simulation results of open-loop and closed-loop systems with an initialoperating condition far from CHF with input Av and output Twe (a) for a 200 W stepincrease in qe (b) for a 50 W step increase in qe.
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
flow, due to the increase in heat load. In the mist flow regime inter-actions between vapor and liquid droplets are expected at theheated boundary which will lead to temperature fluctuations dueto changes in heat transfer coefficient.
For a small disturbance away from CHF the results are signifi-cantly different, as shown in Fig. 4(b). For this disturbance theopen-loop has a smaller temperature increase than the closed-loopsystem. This effect is attributed to the heat transfer coefficientbeing close to a maximum prior to the disturbance. A small qe in-crease decreases the thickness of the liquid film on the heated wall,hence increasing the heat transfer coefficient for the open-loopsystem. Such subtle effects are not captured in our model.
3.3. Wall temperature control with only compressor speed
We now consider SISO control with x as the control input.Using the linearized system (2), we design a PI controller similarto the Av-only case:
Cx ¼ �2:676 1þ 176s
� �ð4Þ
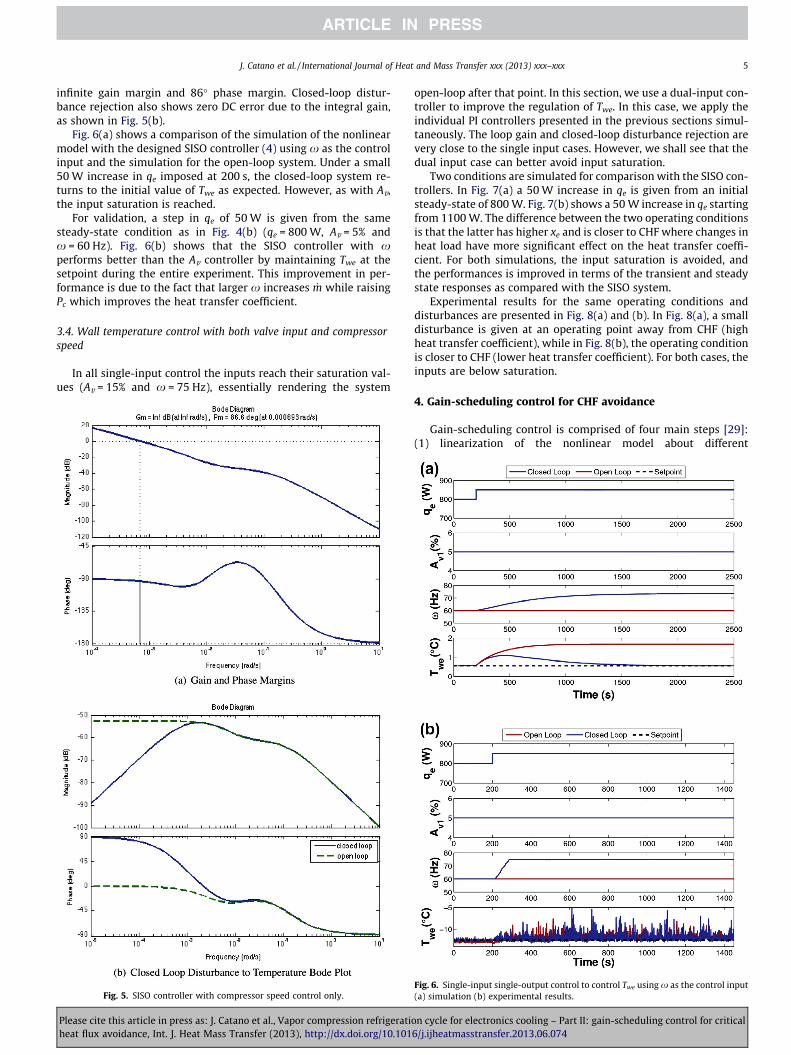
For the linearized system, the compressor speed controller hassimilar performance as the valve-based controller. The loop gain,shown in Fig. 5(a), shows almost identical robustness margins:
Fig. 4. Experimental comparison between open-loop and closed-loop control ofVCC with an initial operating condition far from CHF with input Av and output Twe
(a) for a 200 W step increase in qe (b) for a 50 W step increase in qe.
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074
J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx 5
infinite gain margin and 86� phase margin. Closed-loop distur-bance rejection also shows zero DC error due to the integral gain,as shown in Fig. 5(b).
Fig. 6(a) shows a comparison of the simulation of the nonlinearmodel with the designed SISO controller (4) using x as the controlinput and the simulation for the open-loop system. Under a small50 W increase in qe imposed at 200 s, the closed-loop system re-turns to the initial value of Twe as expected. However, as with Av,the input saturation is reached.
For validation, a step in qe of 50 W is given from the samesteady-state condition as in Fig. 4(b) (qe = 800 W, Av = 5% andx = 60 Hz). Fig. 6(b) shows that the SISO controller with xperforms better than the Av controller by maintaining Twe at thesetpoint during the entire experiment. This improvement in per-formance is due to the fact that larger x increases _m while raisingPc which improves the heat transfer coefficient.
3.4. Wall temperature control with both valve input and compressorspeed
In all single-input control the inputs reach their saturation val-ues (Av = 15% and x = 75 Hz), essentially rendering the system
Fig. 5. SISO controller with compressor speed control only.
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
open-loop after that point. In this section, we use a dual-input con-troller to improve the regulation of Twe. In this case, we apply theindividual PI controllers presented in the previous sections simul-taneously. The loop gain and closed-loop disturbance rejection arevery close to the single input cases. However, we shall see that thedual input case can better avoid input saturation.
Two conditions are simulated for comparison with the SISO con-trollers. In Fig. 7(a) a 50 W increase in qe is given from an initialsteady-state of 800 W. Fig. 7(b) shows a 50 W increase in qe startingfrom 1100 W. The difference between the two operating conditionsis that the latter has higher xe and is closer to CHF where changes inheat load have more significant effect on the heat transfer coeffi-cient. For both simulations, the input saturation is avoided, andthe performances is improved in terms of the transient and steadystate responses as compared with the SISO system.
Experimental results for the same operating conditions anddisturbances are presented in Fig. 8(a) and (b). In Fig. 8(a), a smalldisturbance is given at an operating point away from CHF (highheat transfer coefficient), while in Fig. 8(b), the operating conditionis closer to CHF (lower heat transfer coefficient). For both cases, theinputs are below saturation.
4. Gain-scheduling control for CHF avoidance
Gain-scheduling control is comprised of four main steps [29]:(1) linearization of the nonlinear model about different
Fig. 6. Single-input single-output control to control Twe using x as the control input(a) simulation (b) experimental results.
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074

Fig. 7. Simulation of open-loop and dual-input control of Twe for a 50 W step changein qe (a) for moderate xe (b) for high xe.
Fig. 8. Experimental results for open-loop and dual-input control of Twe for a 50 Wstep change in q (a) for moderate x (b) for high x .
6 J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx
equilibrium points, (2) linear controller design at each equilibrium,(3) scheduling of the controllers based on the scheduling variableand (4) evaluation of the global controller performance (usuallyby extensive simulation [30]). It is important for the schedulingvariable to capture the nonlinearities of the system [31]. It is alsodesirable that the scheduling variable varies slowly to have smoothtransitions between controllers and to guarantee stability of theentire system. For the VCC control, we choose Twe as the schedulingvariable because it is directly affected by the dryout condition andcan be measured (i.e., not requiring a model or subject to theestimation error, as in the case of exit quality, xe). For the controllerimplementation, Twe is filtered by a low pass filter to removesensor noise and a dead-zone is applied to avoid undesired rapidcontroller switching. The drawback of using Twe is that it maynot be able to catch the CHF condition, which may occur suddenly,in time. To address this issue, we set the transition condition be-tween the controllers at a temperature lower than the expectedTwe at the full onset of CHF to avoid getting close the CHF condition.This temperature is system-dependent and will be a function offluid properties, evaporator geometry and operating conditions.For the current system the transition was determined empiricallythrough manual tuning.
We set the scheduling based on the following condition whichindicates that the system is approaching the dryout condition
Twe > 35�C; _Twe > 0: ð5Þ
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
Under this condition, a controller designed at an equilibrium pointat the onset of CHF is implemented. Otherwise, a controller de-signed at an equilibrium point away from the CHF condition is ap-plied. Currently, only two controllers (away and near dryout) areused since the purpose is to demonstrate that the controller canprevent CHF. For other operating conditions, additional controllerscould be designed and included in the gain-scheduling scheme.
For the equilibrium condition near CHF, a steady-state condi-tion was found just before xe reached xcrit. To obtain this condition,simulations are performed by imposing small steps in qe until thedryout condition is identified. The equilibrium condition corre-sponded to Av = 6%, x = 60 Hz, qe = 1312.7 W and qa = 300 W. Thetransfer function of the linearized system is of the same form as(2), with parameter values given by
DðsÞ¼ ðsþ22:57Þðsþ0:1948Þðsþ0:08248Þðsþ0:02198Þðsþ0:005242ÞNvðsÞ ¼�0:02108ðsþ13:53Þðsþ0:1873Þðsþ0:095Þðsþ0:02414ÞNwðsÞ¼�0:02508ðsþ0:1956Þðsþ0:07187Þðsþ0:0145ÞNqðsÞ¼1:01�10�4ðsþ20:79Þðsþ0:1948Þðsþ0:0819Þðsþ0:01849Þ:
Using the same methodology for the controller design as before, thefollowing PI controllers are obtained:
CAv ¼ �0:2214 1þ 167s
� �ð6Þ
e e e
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074

Fig. 9. Dual-Input CHF avoidance controller.
Fig. 10. Experimental demonstration of CHF avoidance using dual-input gain-scheduling control and comparison with open-loop system.
Fig. 11. Comparison between dual-input gain-scheduling control and single PIcontrol for CHF avoidance.
J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx 7
Cx ¼ �2:987 1þ 136s
� �ð7Þ
The loop gain and closed-loop disturbance to temperature Bodeplots are shown in Fig. 9(a) and (b), respectively. The robustnessmargins remain excellent: infinite gain margin and 64� phase mar-gin. However, the bandwidth is increased by an order of magnitude,which means the controller is much more aggressive. This is chosenby design for the system to quickly react to avoid getting into theCHF onset.
For the experimental validation, a disturbance known to lead toCHF for the open-loop system (by using the nonlinear model) isimposed. Fig. 10 shows the comparison between the open-loopand closed-loop experiments. For the open-loop experiment, the50 W pulse causes a temperature rise of more than 80 �C. Thegain-scheduling control is capable of bringing Twe back to its equi-librium before the temperature run-off. The temperature rise forthe controlled system is less than 10 �C and the temperaturereaches the setpoint after 140 s. Note that, the closed-loop systemreaches a new equilibrium after qe returns to its initial value sinceAv and x now have different values than the initial steady-state
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
condition. The wall temperature Twe is about the same as prior tothe disturbance. The control system automatically adjusts thevalve opening and compressor speed so that the new operatingpoint corresponds to the same Twe for the higher input heat load,qe. Note that the higher compressor speed means that this operat-ing point is less efficient. This trade-off between efficiency androbustness is not surprising, as the new equilibrium correspondsto a larger xavail resulting in better disturbance rejection property(with respect to qe). It is possible to add another loop to adjustthe operating point to minimize energy consumption while pre-serving robustness. An extremum seeking approach [32] has beenpresented in [23].
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074

8 J. Catano et al. / International Journal of Heat and Mass Transfer xxx (2013) xxx–xxx
To validate the use of gain-scheduling controller a single PI con-troller, tunned near CHF (Eqs. (6) and (7)), is tested for the samedisturbance as the gain-scheduling control. The results are pre-sented in Fig. 11. The experiment was interrupted once it was clearthis single PI controller was not able to avoid CHF. x reaches itssaturation point with a monotonically increasing Twe and furtheropening of Av proves ineffective in decrease Twe.
5. Conclusions
This paper shows the simulation and experimental results ofthe temperature control of a refrigeration system with imposedheat flux. The control variables are the valve opening and compres-sor speed. Proportional-Integral controllers are designed based onlinearized model and shown to be effective at regulating the evap-orator wall temperature in the presence of fluctuating heat load,away and near CHF. For CHF avoidance, gain-scheduling controlis used based on the wall temperature measurements. We demon-strate that the controller is able to avoid the rapid temperature rise(by 80 �C) due to the heat load increase. Currently under develop-ment are the application of multivariable robust control and exten-sion to the multi-evaporator case.
Acknowledgments
This work is supported primarily by the Office of NavalResearch (ONR) under the Multidisciplinary University ResearchInitiative (MURI) award N00014-07-1-0723 ‘‘System-LevelApproach for Multi-Phase, Nanotechnology-Enhanced Cooling ofHigh-Power Microelectronic Systems’’, and in part by ONR AwardN00014-13-1-0189, the National Science Foundation (NSF) SmartLighting Engineering Research Center (EEC-0812056), and theCenter for Automation Technologies and Systems (CATS) under ablock Grant from the New York State Empire State DevelopmentDivision of Science, Technology and Innovation (NYSTAR).
References
[1] N.S. Ashraf, H.C. Carter III, K. Casey, L.C. Chow, S. Corban, M.K. Drost, A.J. Gumm,Z. Hao, A.Q. Hasan, J.S. Kapat, L. Kramer, M. Newton, K.B. Sundaram, J. Vaida,C.C. Wong, K. Yerkes, Design and analysis of a meso-scale refrigerator, in: Int.Mech. Eng. Congr. Exposition, Nashville, TN, 1999.
[2] W.A. Little, Recent advances in low cost cryogenic coolers for electronics, in :Proc. 16th IEEE SEMI-THERM Symp., 2000.
[3] P.E. Phelan, J. Swanson, F. Chiriac, V. Chiriac, Designing a mesoscale vapor-compression refrigerator for cooling high-power microelectronics, in: ITHERM2004: the Ninth Intersociety Conf. Therm. Thermomech. Phenom. Electron.Syst., Las Vegas, NV, 2004.
[4] A. Heydari, Miniature vapor compression refrigeration system for activecooling of high performance computers, in: ITHERM 2002: the EighthIntersociety Conf. Therm. Thermomech. Phenom. Electron. Syst., San Diego,CA, 2002.
[5] A.A. Sathe, E.A. Groll, S.V. Garimella, Optimization of electrostatically actuatedminiature compressor for electronics cooling, Int. J. Refrig. 32 (2009) 1517–1525.
[6] J.W. Peeples, Vapor compression cooling for high performance applications,Electron. Cooling Mag. 7 (3) (2001) 16–24.
Please cite this article in press as: J. Catano et al., Vapor compression refrigeratiheat flux avoidance, Int. J. Heat Mass Transfer (2013), http://dx.doi.org/10.101
[7] S. Trutassanawin, E.A. Groll, S.V. Garimella, L. Cremaschi, Experimentalinvestigation of a miniature-scale refrigeration system for electronicscooling, IEEE Trans. Compon. Packag. Technol. 29 (3) (2006) 678–687.
[8] S.V. Garimella, A.S. Fleischer, J.Y. Murthy, A. Keshavarzi, R. Prasher, C. Patel, S.H.Bhavnami, R. Venkatasubramanian, R. Mahajan, Y. Yoshi, B. Sammakia, B.A.Myers, L. Chorosinski, M. Baelmans, P. Sathyamurthy, P.E. Raad, Thermalchallenges in next-generation electronic systems, IEEE Trans. Compon. Packag.Technol. 31 (4) (2008) 801–815.
[9] J. Lee, I. Mudawar, Implementation of microchannel evaporator for high-heat-flux refrigeration cooling applications, J. Electron. Packag. 128 (2006) 18–27.
[10] B.P. Rasmussen, A. Alleyne, Gain scheduled control of an air conditioningsystem using the youla parameterization, in: American Control Conf.,Minneapolis, MN, 2006.
[11] G. Trystram, D. Leducq, J. Guilpart, Non-linear predictive control of a vapourcompression cycle, Int. J. Refrig. 29 (2006) 761–772.
[12] G. Diaz, Controllability of cross-flow two-phase heat exchangers, Int. J. Heatand Mass Transfer 50 (2007) 4559–4567.
[13] J.-L. Lin, T.-J. Yeh, Control of multi-evaporator air-conditioning systems forflow distribution, Energy Convers. Manage. 50 (2009) 1529–1541.
[14] M.S. Elliot, B.P. Rasmussen, A model-based predictive supervisory controllerfor multi-evaporator hvac systems, in: American Control Conf., St. Louis, MO,2009.
[15] J.G. Collier, J.R. Thome, Convective Boiling and Condensation, third ed., OxfordScience Publlication, New York, NY, 1996.
[16] X.-D. He, H.A. Asada, A new feedback linearization approach to advancedcontrol of multi-unit hvac systems, in: American Control Conf., Denver, CO,2003.
[17] G.F. Goth, D.J. Kearney, U. Meyer, D.W. Porter, Hybrid cooling with cyclesteering in the ibm eserver z990, IBM J. Res. Dev. 48 (3/4) (2004) 409–423.
[18] J.S. Shamma, M. Athans, Massachusetts Institute of Technology, Laboratory forInformation, and Decision Systems, Analysis of gain scheduled control forlinear parameter-varying plants. LIDS-P. Laboratory for Information andDecision Systems, Massachusetts Institute of Technology, 1988.
[19] D.J Leith, W.E. Leithead, Survey of gain-scheduling analysis design, Int. J.Control 73 (2000) 1001–1025.
[20] K.J. Astrom, B. Wittenmark, Adaptive Control, second ed., Addison-WesleyLongman Publishing Co., Inc., Boston, MA, USA, 1994.
[21] M. Morari, J.H. Lee, Model predictive control: past, present and future, Comput.Chem. Eng. 23 (4–5) (1999) 667–682.
[22] M.S. Elliot, B.P. Rasmussen, Model-based predictive control of a multi-evaporator vapor compression cooling cycle, in: American Control Conf.,Seattle, WA, 2008.
[23] J. Catano, Dynamic modeling and advanced control of vapor compressioncycles for electronics cooling, Ph.D. thesis, Department of Mechanical,Aerospace and Nuclear Engineering, Rensselaer Polytechnic Institute, 2011.
[24] R.R. Schmidt, B.D. Notohardjono, High-end server low temperature cooling,IBM J. Res. Dev. 46 (6) (2002) 739–751.
[25] J. Catano, T. Zhang, Y. Peles, M.K. Jensen, J.T. Wen, Experimental identificationof evaporator dynamics for vapor compression refrigeration cycle duringphase transition, in: ITHERM 2010: the 12th Intersociety Conf. Therm.Thermomech. Phenom. Electron. Syst., Las Vegas, NV, 2010.
[26] T. Catano, T.J. Zhang, J.T. Wen, M.K. Jensen, Y. Peles, Vapor compressionrefrigeration cycle for electronics cooling – part I: Dynamic modeling andexperimental validation, Int. J. Heat Mass Transfer, (2013), http://dx.doi.org/10.1016/j.ijheatmasstransfer.2013.06.075.
[27] Heating Air-Conditioning and Refrigeration Institute. Performance rating ofpositive displacement refrigerant compressors and compressor units. ANSI/AHRI Standard 540 (formerly ARI Standard 540), 2004.
[28] G.F. Franklin, J.D. Powell, A. Emami-Naeini, Feedback Control of DynamicSystems, third ed., Addison-Wesley, 1994.
[29] W.J. Rugh, J.S. Shamma, Research on gain scheduling, Automatica 36 (10)(2000) 1401–1425.
[30] B.P. Rasmussen, Dynamic modeling and advanced control of air conditioningand refrigeration systems. Ph.D. thesis, Department of Mechanical Science andEngineering, University of Illinois at Urbana-Champaign, 2005.
[31] J. Gao, H.M. Budman, Design of robust gain-scheduling pi controllers fornonlinear processes, J. Process Control 15 (7) (2005) 807–817.
[32] M. Krsti, H.-H. Wang, Stability of extremum seeking feedback for generalnonlinear dynamic systems, Automatica 36 (4) (2000) 595–601.
on cycle for electronics cooling – Part II: gain-scheduling control for critical6/j.ijheatmasstransfer.2013.06.074
Related Documents











