
University of Tehran 1 Microprocessor System Design IO Applications Omid Fatemi ([email protected])
Jan 02, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


University of Tehran 2
Outline
• LCD
• Stepper motor
• ADC and DAC
• Sensors
• PC parallel port

University of Tehran 3
New LCDs Interfacing
• Lower prices
• Display numbers, characters, graphics
• Integrated refreshing controller
• Ease of programming

University of Tehran 4
Pin Description

University of Tehran 5
Command Codes
University of Tehran 6
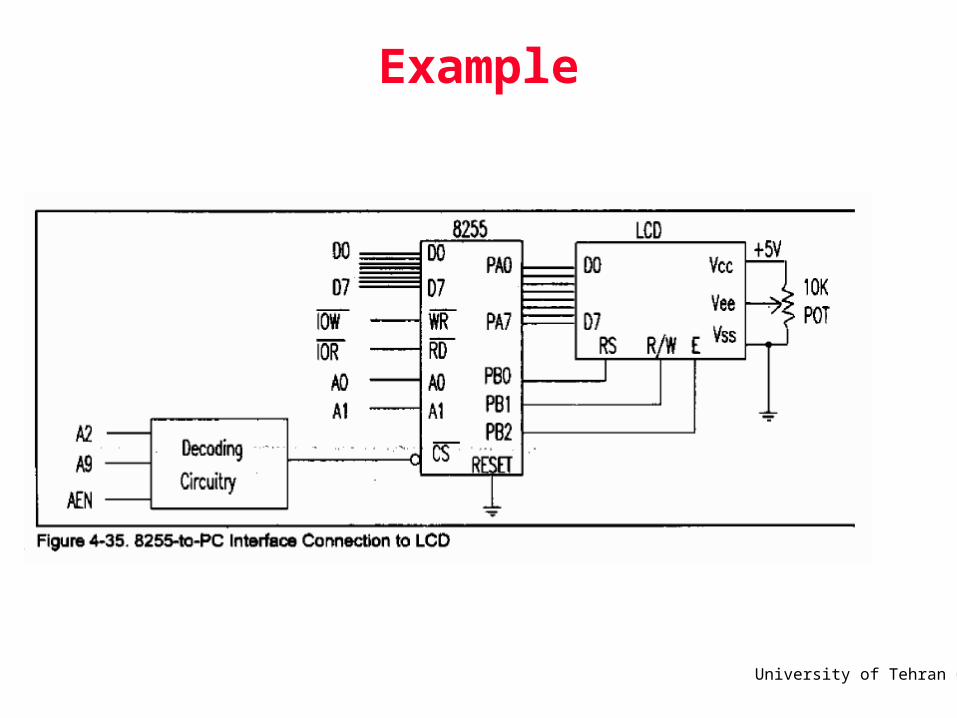
Example
University of Tehran 7
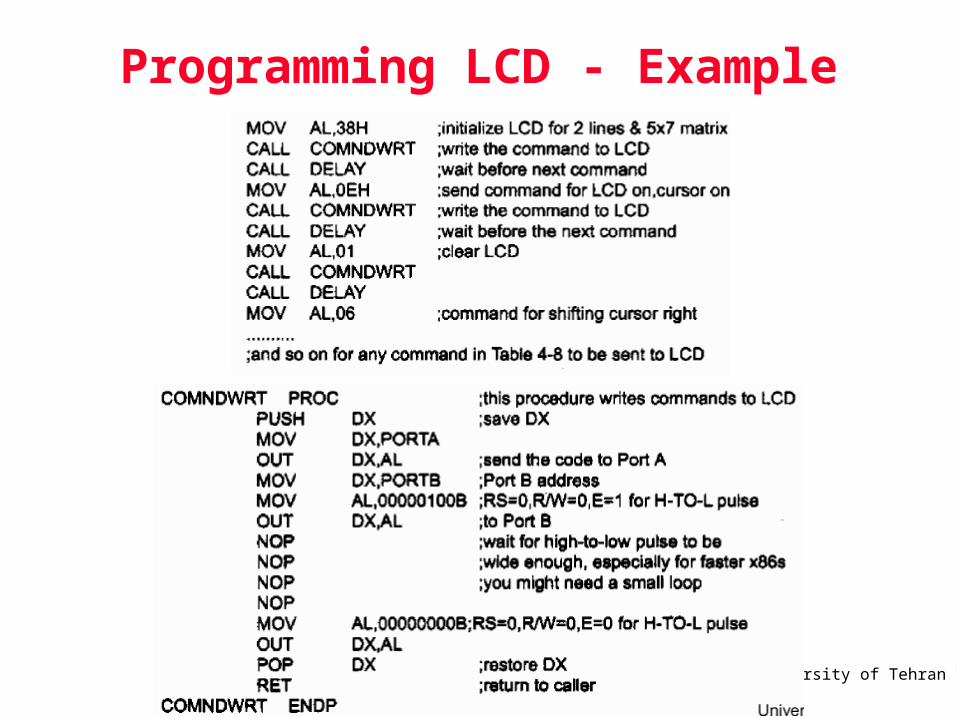
Programming LCD - Example

University of Tehran 8
Sending Data
University of Tehran 9
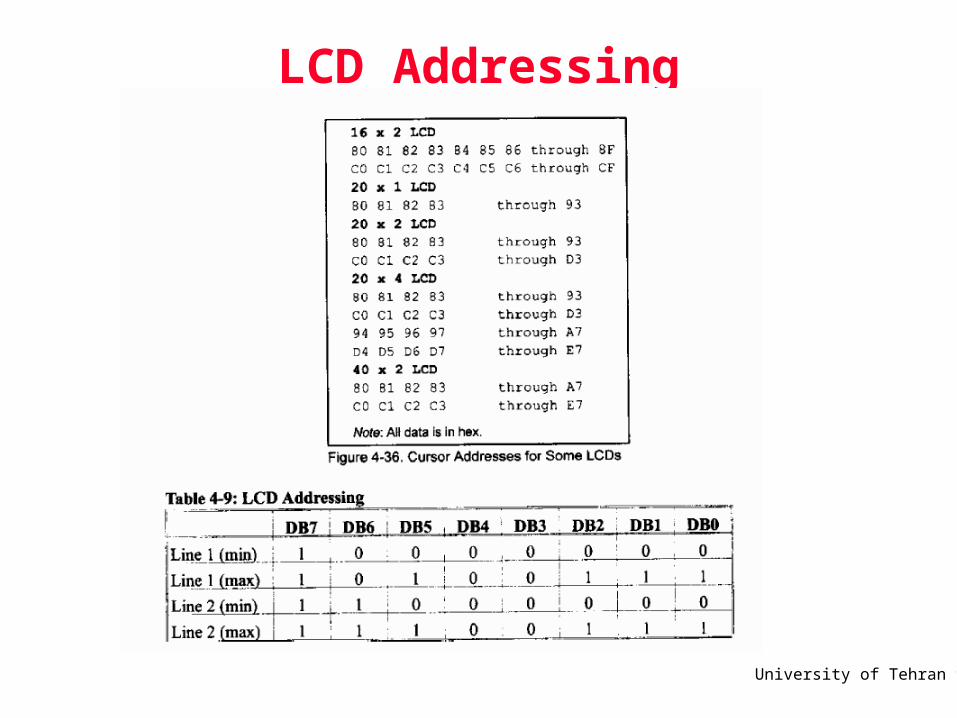
LCD Addressing
University of Tehran 10
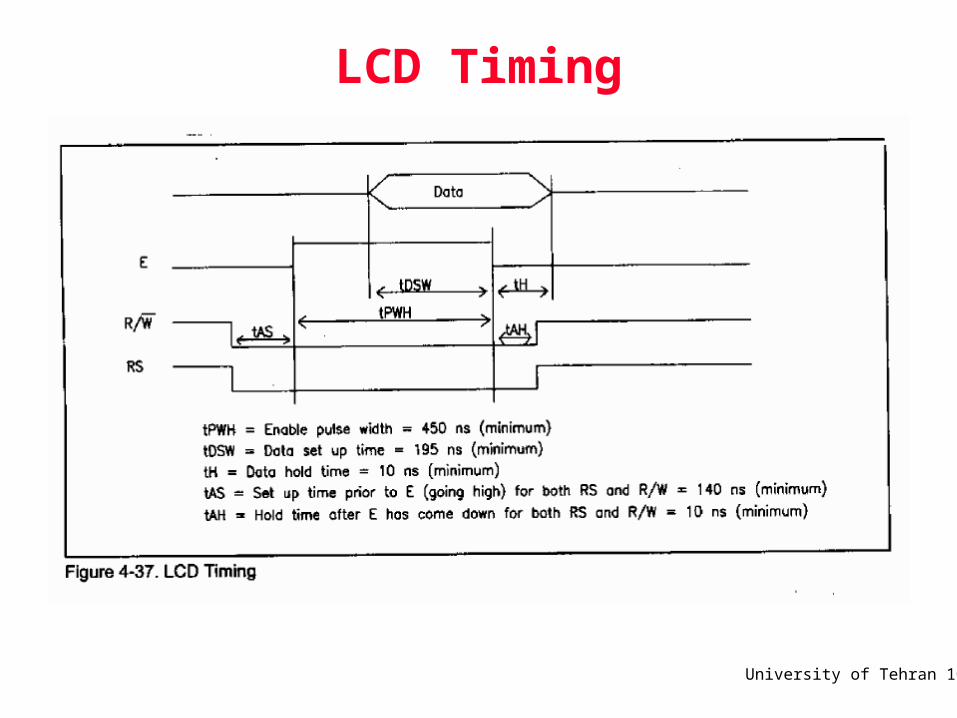
LCD Timing
University of Tehran 11
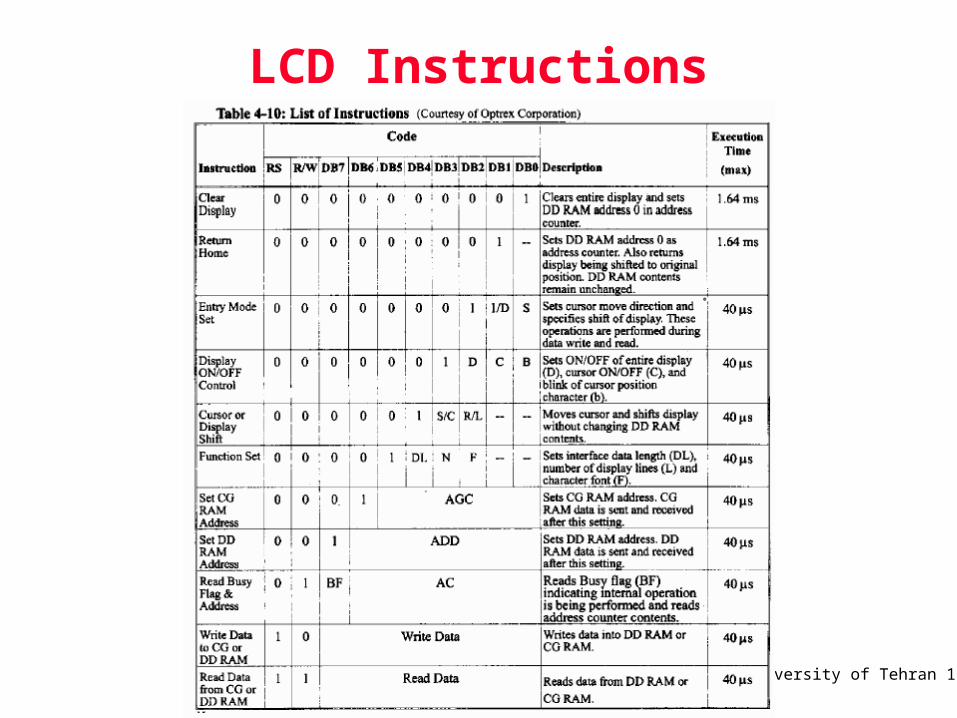
LCD Instructions
University of Tehran 12
Stepper Motors
• more accurately controlled than a normal
motor allowing fractional turns or n
revolutions to be easily done
• low speed, and lower torque than a
comparable D.C. motor
• useful for precise positioning for robotics
• Servomotors require a position feedback signal for control
University of Tehran 13
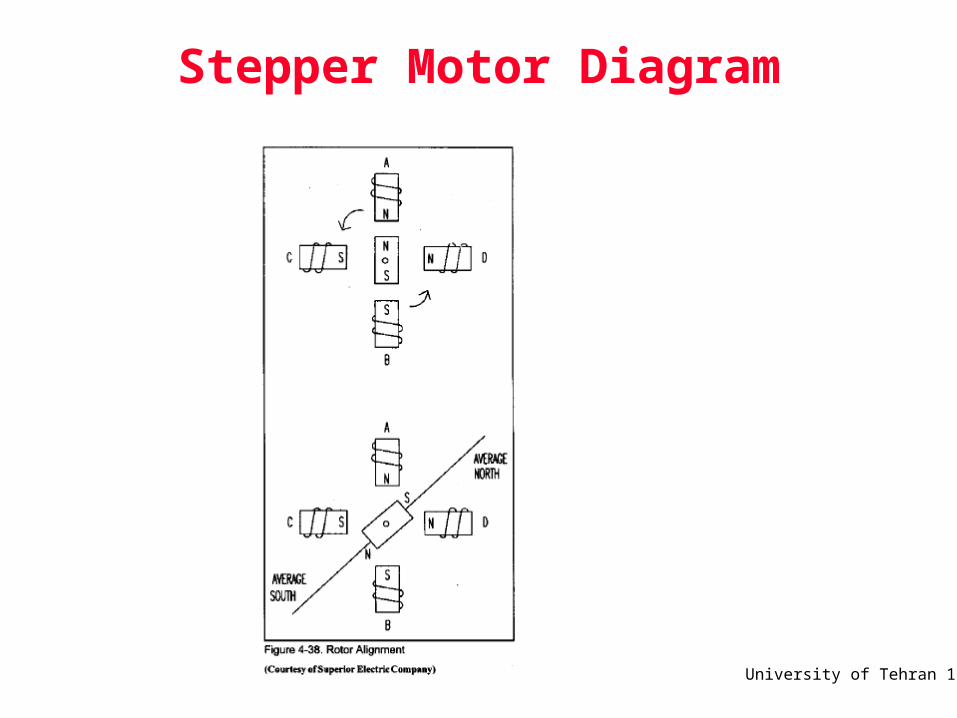
Stepper Motor Diagram
University of Tehran 14
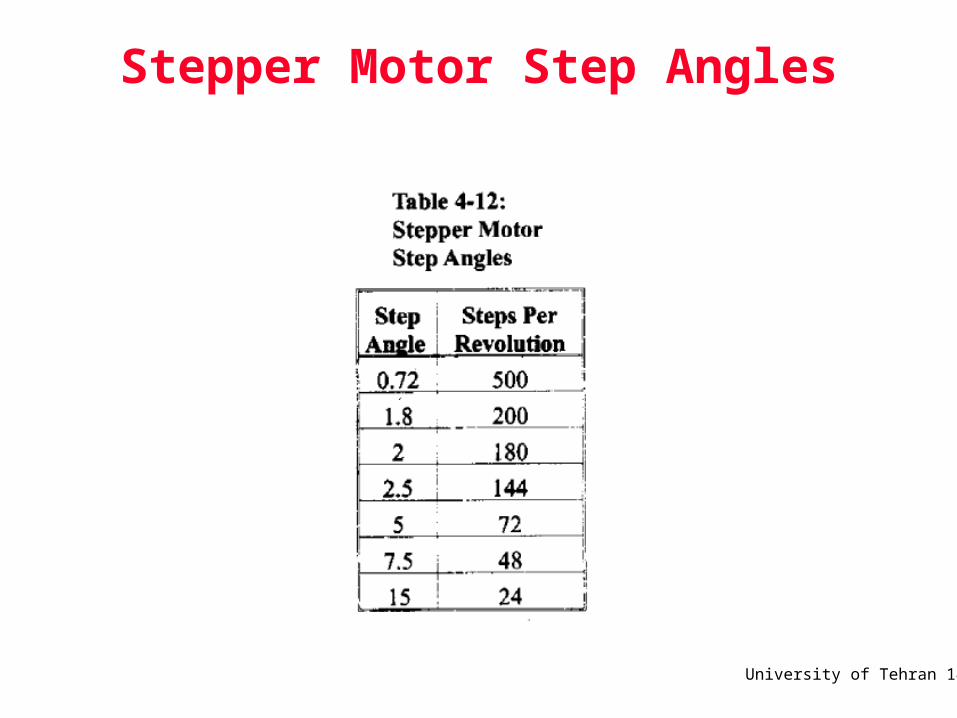
Stepper Motor Step Angles

University of Tehran 15
Terminology
• Steps per second, RPM
– SPS = (RPM * SPR) /60
• Number of teeth
• 4-step, wave drive 4-step, 8-step
• Motor speed (SPS)
• Holding torque
University of Tehran 16
Stepper Motor Types
– Variable Reluctance
– Permanent Magnet
University of Tehran 17
Variable Reluctance Motors

University of Tehran 18
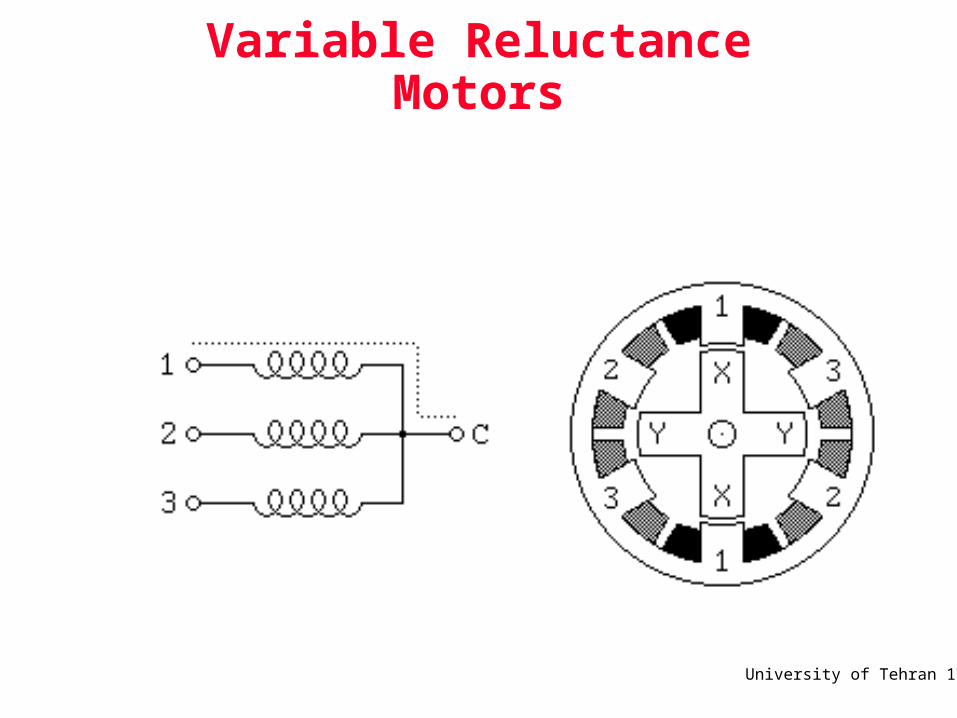
Variable Reluctance Motors
• This is usually a four wire motor – the common wire goes to the +ve supply and the windings are stepped through
• Our example is a 30o motor
• The rotor has 4 poles and the stator has 6 poles
• Example

University of Tehran 19
Variable Reluctance Motors
• To rotate we excite the 3 windings in sequence– W1 - 1001001001001001001001001 – W2 - 0100100100100100100100100 – W3 - 0010010010010010010010010
• This gives two full revolutions

University of Tehran 20
Unipolar Motors
University of Tehran 21
Unipolar Motors
• To rotate we excite the 2 windings in sequence– W1a - 1000100010001000100010001 – W1b - 0010001000100010001000100 – W2a - 0100010001000100010001000– W2b - 0001000100010001000100010
• This gives two full revolutions

University of Tehran 22
Basic Actuation Wave Forms

University of Tehran 23
Unipolar Motors
• To rotate we excite the 2 windings in sequence– W1a - 1100110011001100110011001 – W1b - 0011001100110011001100110 – W2a - 0110011001100110011001100 – W2b - 1001100110011001100110011
• This gives two full revolutions at 1.4 times greater torque but twice the power
University of Tehran 24
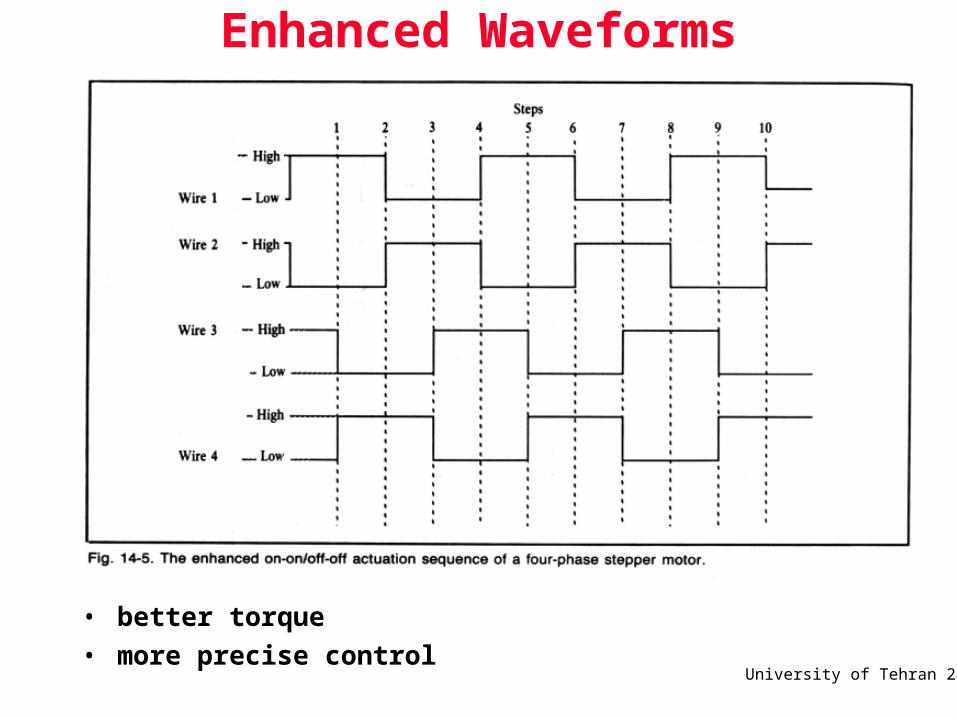
Enhanced Waveforms
• better torque
• more precise control
University of Tehran 25
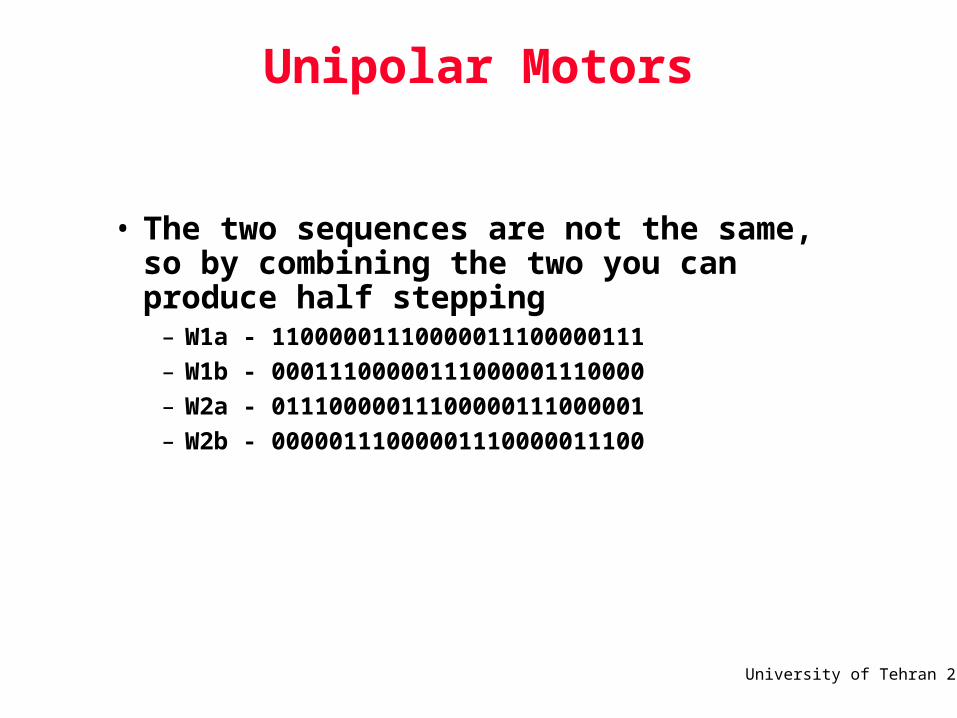
Unipolar Motors
• The two sequences are not the same, so by combining the two you can produce half stepping– W1a - 11000001110000011100000111 – W1b - 00011100000111000001110000 – W2a - 01110000011100000111000001 – W2b - 00000111000001110000011100

University of Tehran 26
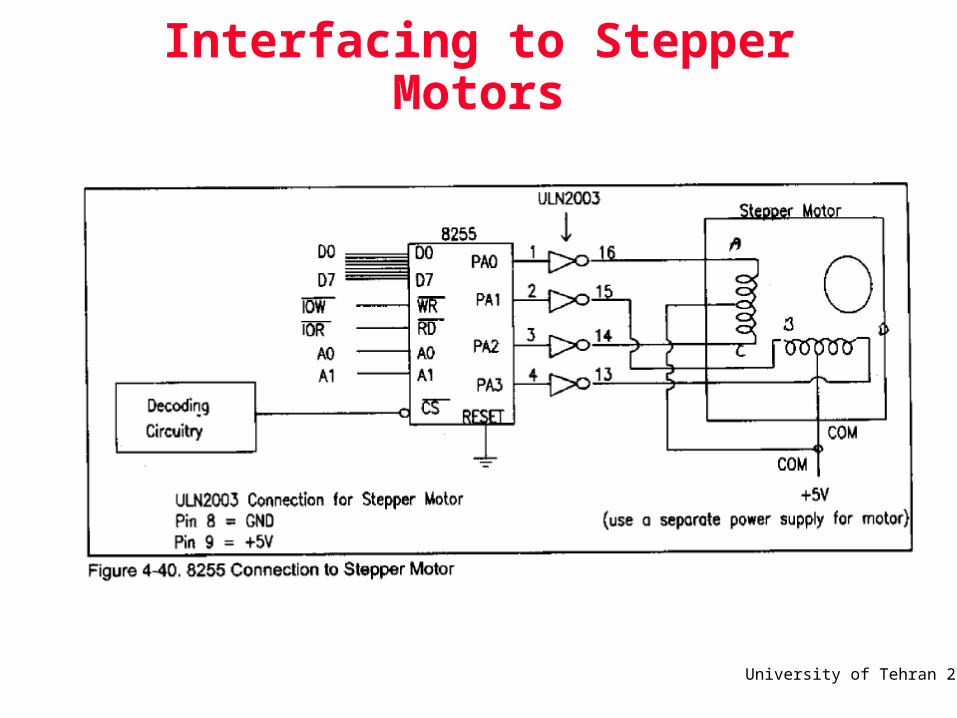
Motor Control Circuits
• For low current options the ULN200x family of Darlington Arrays will drive the windings direct.
University of Tehran 27
Interfacing to Stepper Motors
University of Tehran 28
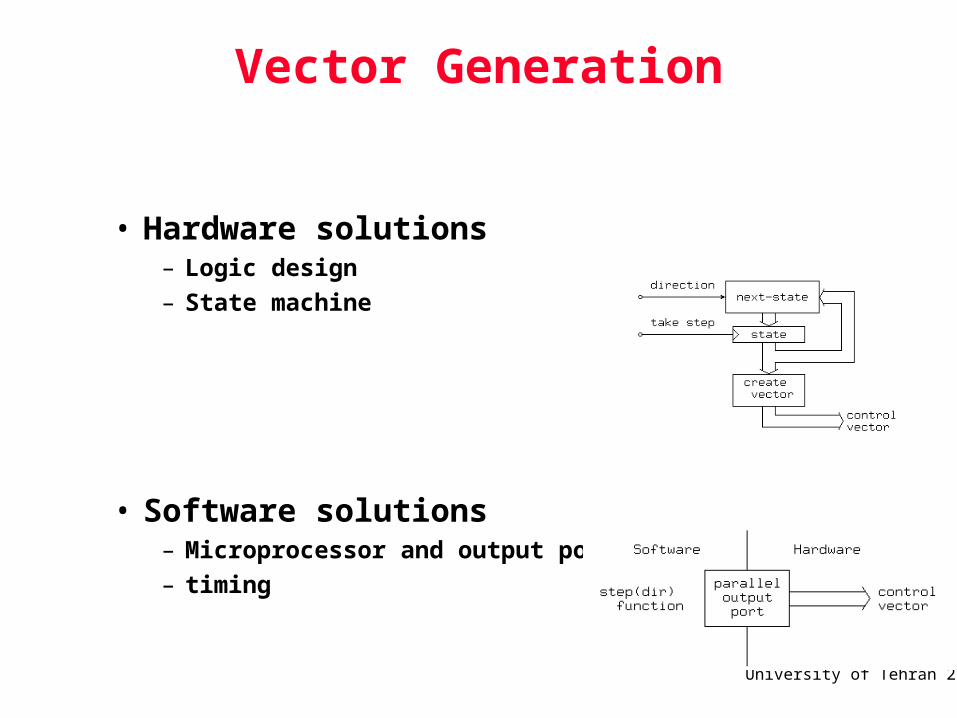
Vector Generation
• Hardware solutions– Logic design
– State machine
• Software solutions– Microprocessor and output ports
– timing
University of Tehran 29
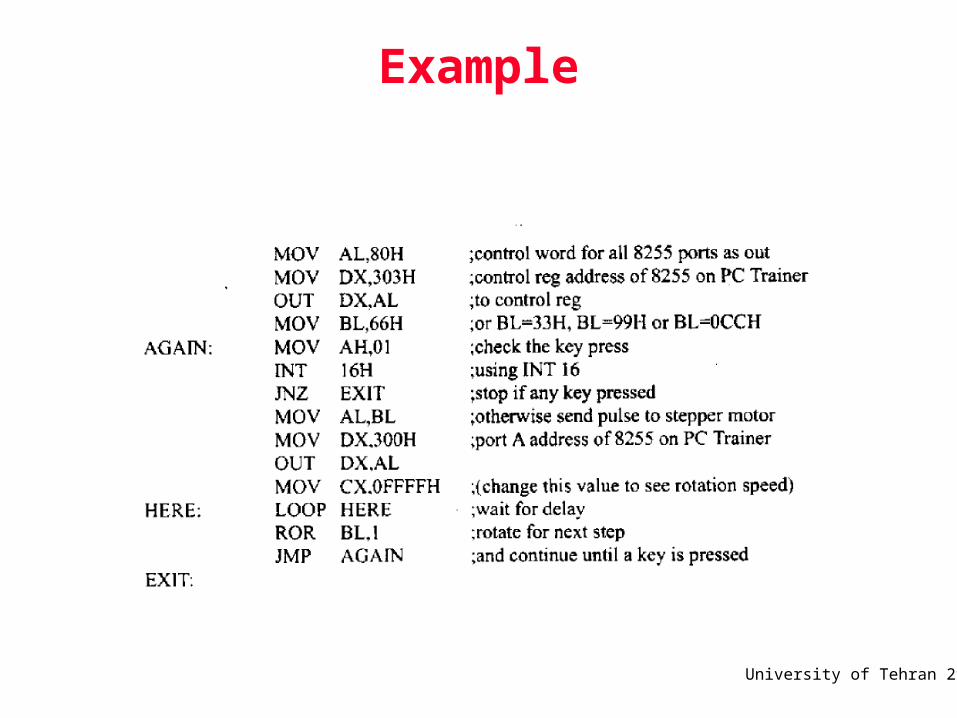
Example

University of Tehran 30
Digital to Analog Converter

University of Tehran 31
Example – Step Ramp

University of Tehran 32
Analog to Digital
University of Tehran 33
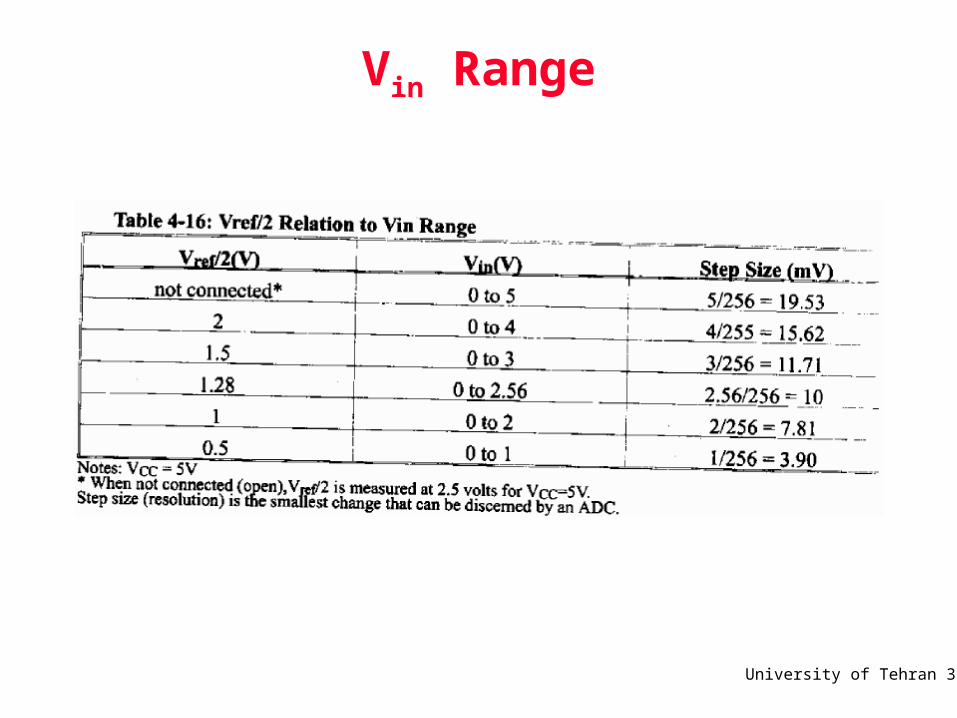
Vin Range

University of Tehran 34
Timing
University of Tehran 35
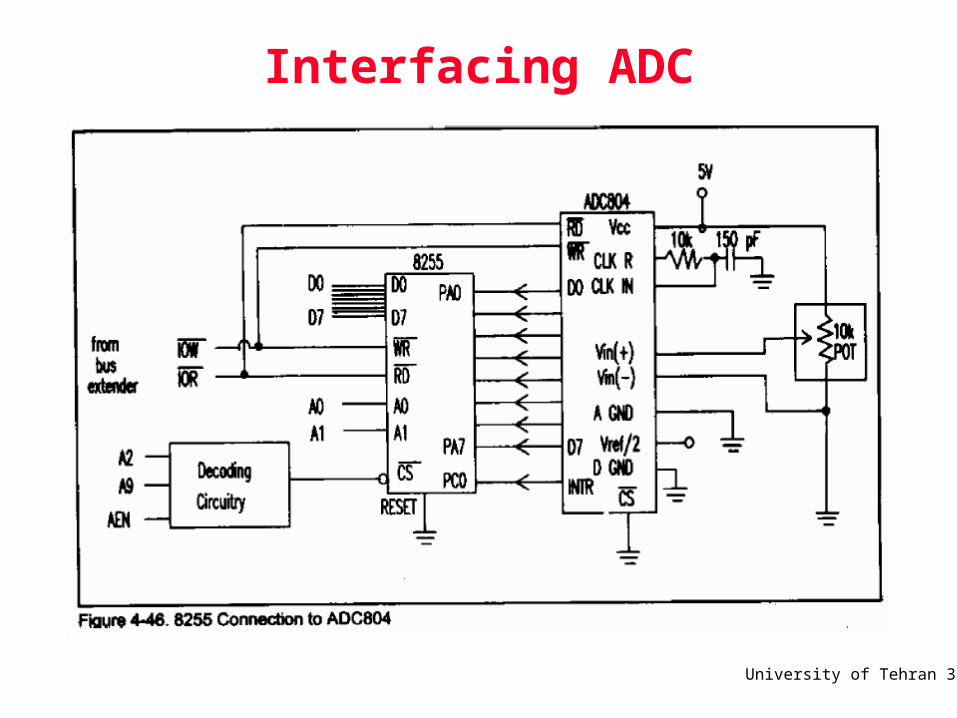
Interfacing ADC
University of Tehran 36
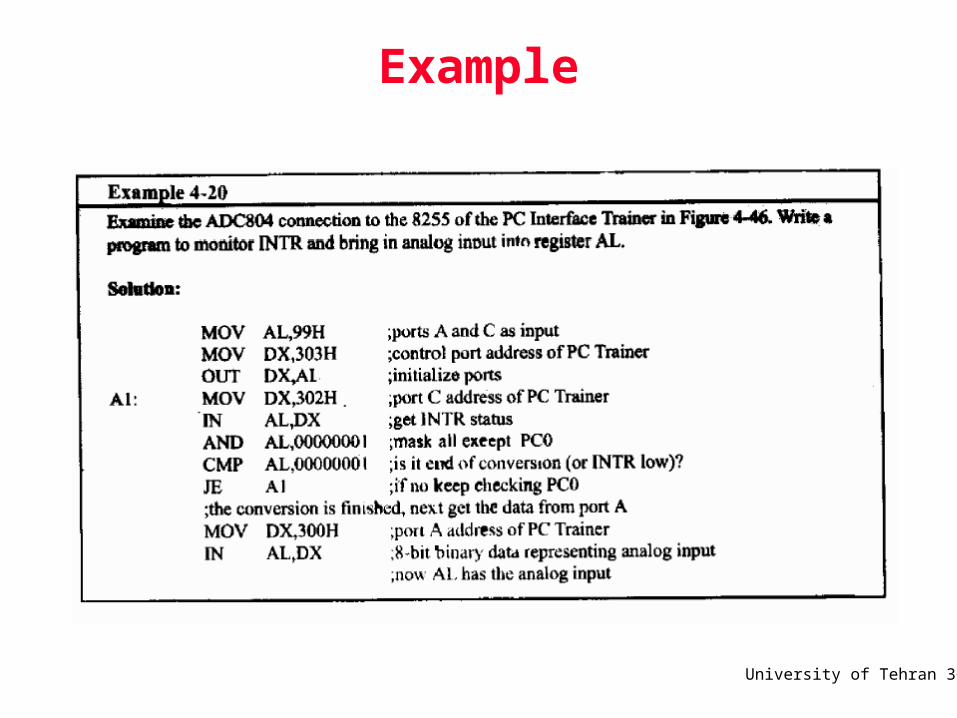
Example

University of Tehran 37
Temperature Sensor

University of Tehran 38
Printer Connection
University of Tehran 39
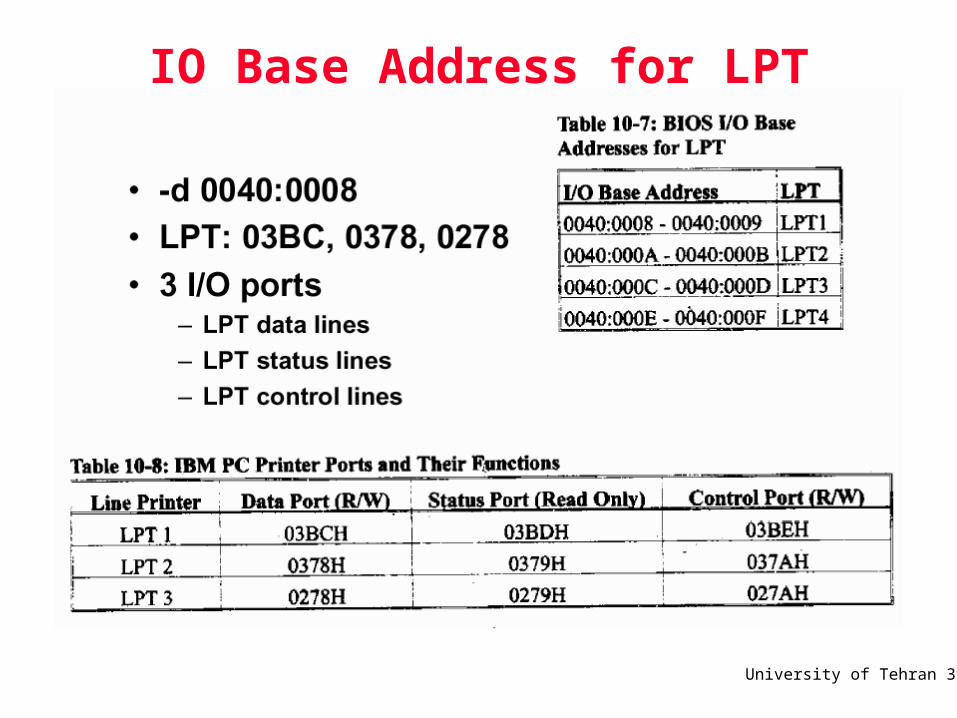
IO Base Address for LPT

University of Tehran 40
Printer’s Ports
University of Tehran 41
Selected Problems (Ch. 4)
Related Documents











