Underwater Localization with Time-Synchronization and Propagation Speed Uncertainties Roee Diamant, Lutz Lampe

Underwater Localization with Time- Synchronization and Propagation Speed Uncertainties Roee Diamant, Lutz Lampe.
Dec 18, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Underwater Localization with Time-Synchronization and Propagation Speed Uncertainties
Roee Diamant, Lutz Lampe
Brief overview on underwater communication
Localization in the underwater acoustic channel
Suggested localization protocol
Future work
Outline
Motivations Most underwater activities require underwater communications [1]
Cables are heavy, deployment is expensive. Solution: wireless information transmission through the ocean
Wireless communication: Radio (30Hz-300Hz, very high attenuation) Optical (short distances, pointing precision)
Large body of relevant applications [2]: Ocean exploration warning systems, pollution control Military underwater surveillance Underwater oil exploration
Challenges of UWAC Fast time-varying frequency-selective channel
Large Doppler shift and Doppler spread
Power attenuation increase with frequency
Ambient noise decreases with frequency
Half duplex communication
Slow propagation speed
Limited signal bandwidth
[3]
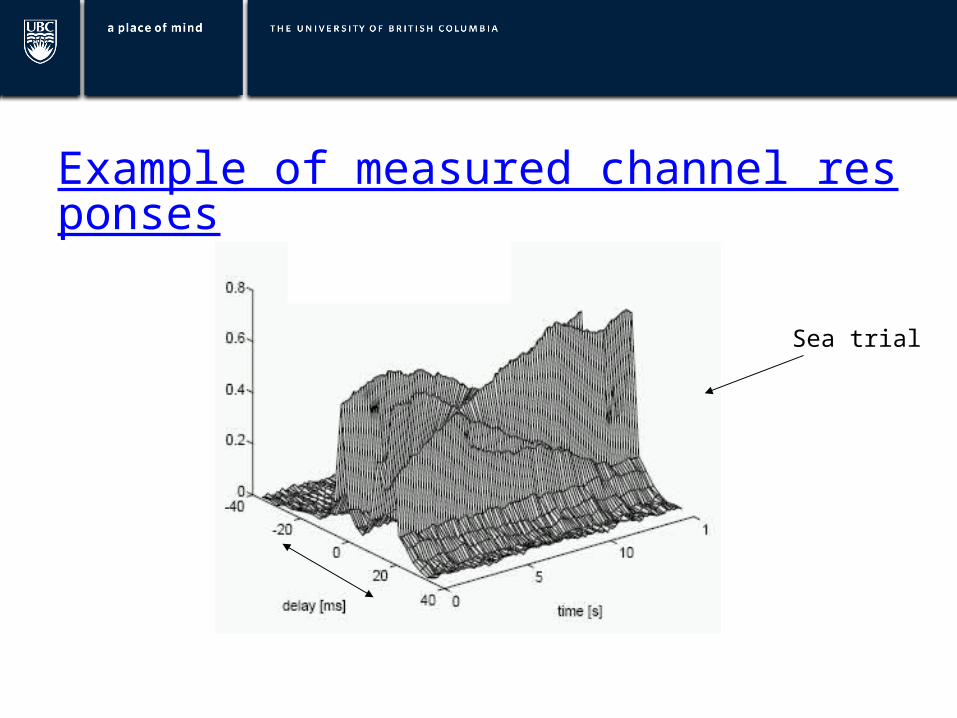
Example of measured channel responses
Sea trial
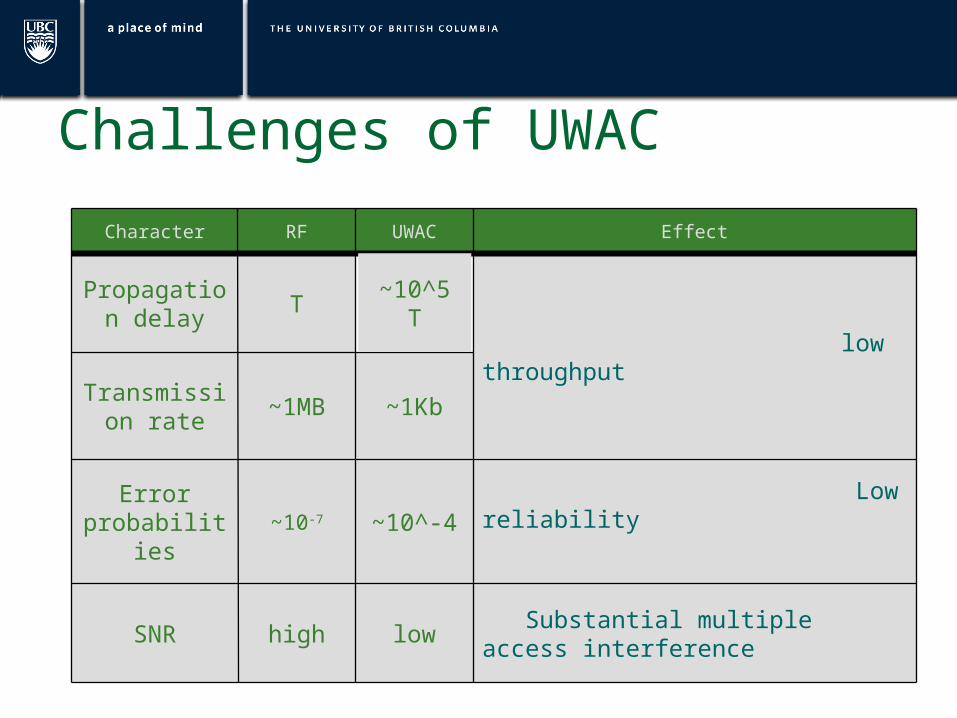
Challenges of UWAC
Character RF UWAC Effect
Propagation delay T
low throughputTransmission
rate ~1MB ~1Kb
Error
probabilities~10-7 ~10^-4
Low reliability
SNR high low Substantial multiple access interference
~10^5 T

Localization in UWAC Networks: GPS is only used by surface nodes [4] Accurate attenuation models are hard to find [3]
Propagation speed is an unknown parameter [5]
Network nodes are not time-synchronized
Nodes permanently move in the channel
Joint time-synchronization and location estimation where the propagation speed is an unknown variable

Brief overview on underwater communication
Localization in the underwater acoustic channel
Suggested localization protocol
Future work
Outline

System Model Network of L anchor nodes at known time-varying locations
At least one unlocalized node at time-varying location
Nodes are not time-synchronized such that
Unlocalized node has INS system to self evaluate its location
Self-evaluated locations are not accurate but are used to accurately measure movements for a short period of time
ypi
xpi ll ,, ,
Anchor node index
Location index yn
xn jj ,
lllm ostt
Node’s m time
Node’s l time SkewOffset
2'
2
'',yn
yn
xn
xnnn jjjjd x
nxn
yn
yn
nn jj
jj
'
'',tan
Location index
m

System Model (2) Propagation delay is
where is the unknown propagation speed within
The objective is to estimate at the end of a localization window with duration
c
22pd,
1 yp
yn
xp
xnpn ljlj
cT
sec15601420 mc
yN
xN jj ,
W

Available MeasurementsaplT ,
anR
bnT '
bplR ',
We assume that time-of-arrival (ToA) measurements are affected by i.i.d white Gaussian noise
time
Unlocalized node
Anchor node

Problem Formulation
xn
xn
yn
yn
nn
yn
yn
xn
xnnn
lpn
yp
yn
xp
xnpnl
jj
jj
jj
jjjjd
ljljc
TyN
xN
'
'',
2
'
2
'',
l2pd
p',n'l,bp'l,l
bn'
l1pd
pn,l,apl,l
an
,,
22pd,,
,
tan)4(
)3(
o+)-T+(Rs=T)2(
o+)+T+(Ts=R)1(
1560c1420:s.t
1min
Given pnl ,,R,R,T,T,l,l bpl,
an
bpl,
apl,
yp
xp
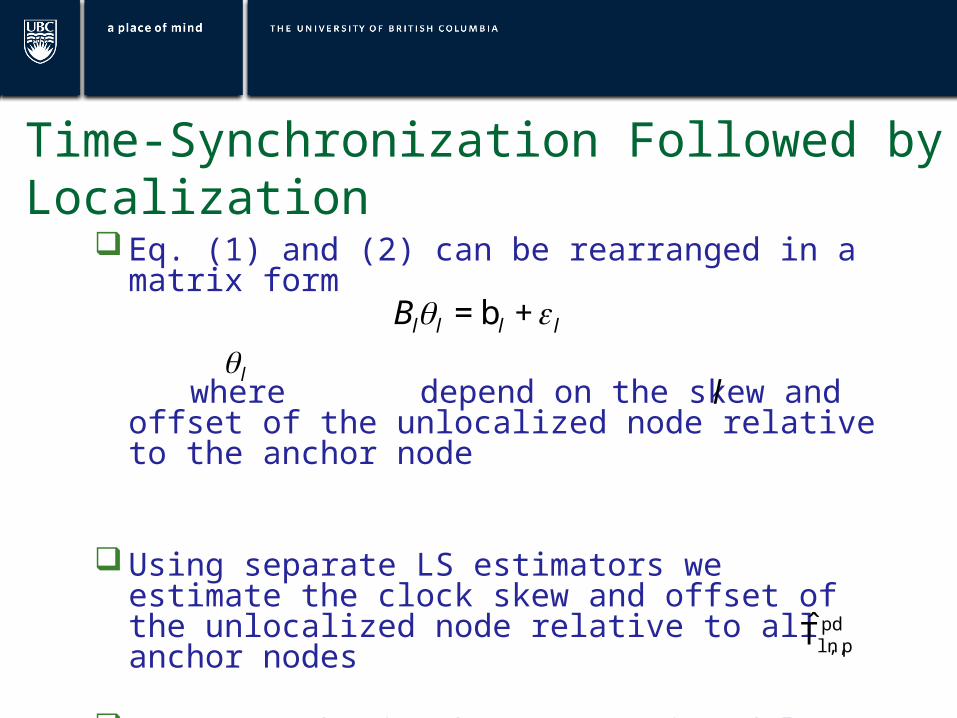
Time-Synchronization Followed by Localization
Eq. (1) and (2) can be rearranged in a matrix form
where depend on the skew and offset of the unlocalized node relative to the anchor node
Using separate LS estimators we estimate the clock skew and offset of the unlocalized node relative to all anchor nodes
Next, we obtain the propagation delay at all points,
llllB +b=
l
pdpn,l,T
l

Localization Motion vectors can be represented as
We get the following Eq.
)(tan1
d=
n'n,2
n'n,n'n,
)tan(= n'n,n'n,n'n,
','
','
2
''
2
''pd
',',
22pd,,
)4(
)3(
1ˆ)2(
1ˆ)1(
nnyn
yn
nnxn
xn
yp
yn
xp
xnpnl
yp
yn
xp
xnpnl
jj
jj
ljljc
T
ljljc
T
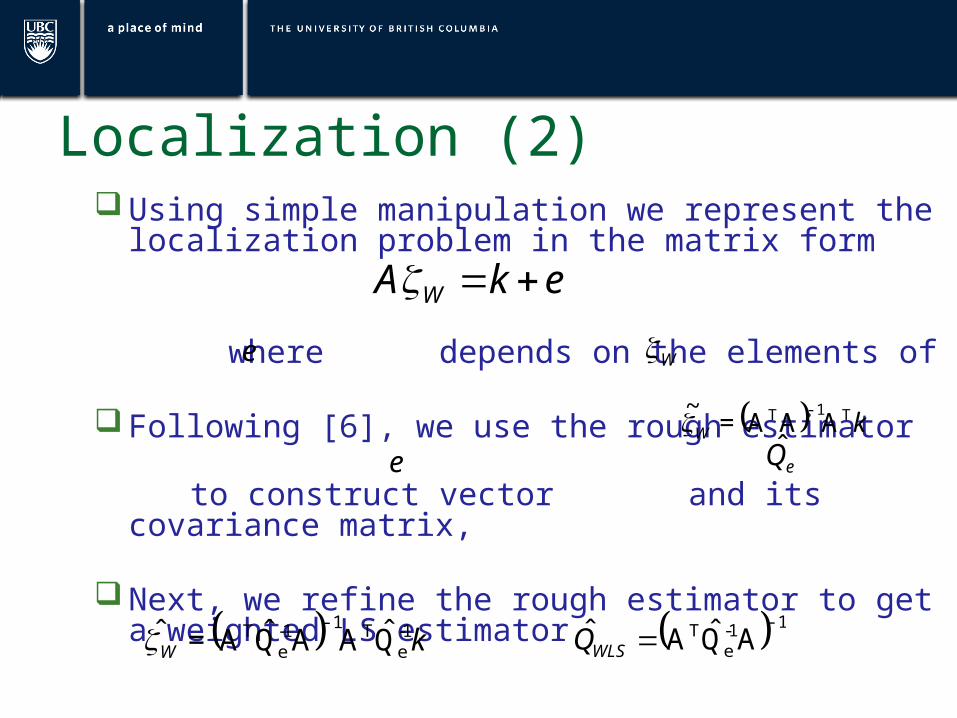
Localization (2) Using simple manipulation we represent the localization
problem in the matrix form
where depends on the elements of
Following [6], we use the rough estimator to construct vector and its covariance matrix,
Next, we refine the rough estimator to get a weighted LS estimator
ekA W
W
kWT-1T AAA=
~
e
eQ
kW1-e
T-11-e
T QAAQA=
e
-11-e
T AQAˆ WLSQ

Localization (3)
Finally, we represent the inner connection between the variables of (related by the motion vectors) in
to estimate
Refinement step: use to construct Then, is used instead of the rough LS estimator
y=jG N
y1-WLS
T-11-WLS
TN QGGQG=j
W
Nj
W
W W~

Flow ChartOnline measurements:
ToA and INS
Initial processing:ToA noise mitigation, motion vectors
Time synchronization for each anchor : Estimate skew and offset
Estimate propagation delay
Localization :Rough LS estimatorConstruct error covariance matrixWLS estimatorUtilize inner connection, WLS estimator
Iterativerefinement

Simulation Results Simulations were performed using 2 anchor nodes and an
unlocalized node, moving at random speed and directions
To simulate errors, we added i.i.d Guassian noise to ToA measurements, and motion vectors
Anchor nodes offset and skew where generated as i.i.d Guassian noise
Results were compared to the simple multileteration method and a benchmark method (joint protocol) [6]. Reference methods are given nominal propagation speed of 1500m/sec

Localization Simulation Results
All nodes time-synchronizedSound speed known
All nodes are time-synchronizedSound speed is unknown
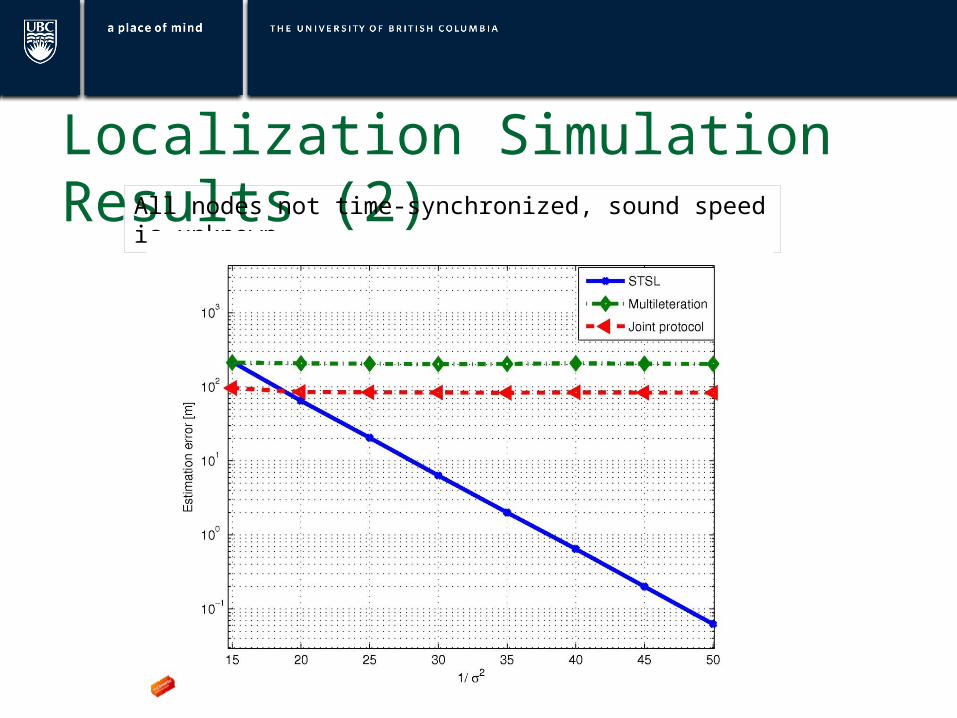
Localization Simulation Results (2)All nodes not time-synchronized, sound speed is unknown

Trial Sea

Sea Trial Four vessels: three anchors and one unlocalized node, each
deployed transceiver at 10m depth Vessels moved freely with ocean current Achieved localization accuracy ~10m (compared with GPS
positioning of the vessels)

Summary and future work We suggested a heuristic algorithm for UWAL
The algorithm compensates time-synchronization and sound-speed uncertainties
Extension of this work will include formalization of the Cramér–Rao bound for the considered problem, propagation speed estimation using localization and results from the sea trial
Follow-up research will be continuous tracking of already localized nodes
[1] M.Chitre, S.Shahabodeen, and M.Stojanovic, “Underwater acoustic communications and networking: Recent advances and future challenges,” in Marine Technology Society Journal, vol. 42, no. 1,2008, pp.103–116
[2 ]W. Burdic, Underwater Acoustic System Analysis. Los Altos, CA, USA: Peninsula Publishing, 2002.
[3 ]Stojanovic and J. G. Proakis, Acoustic (underwater) Communications in Encyclopedia of Telecommunications. Hoboken, NJ, USA: John Wiley and Sons, 2003
[4 ]Lee, P. Lee, S. Hong, and S. Kim, “Underwater navigation system based on inertial sensor and doppler velocity log using indirect feedback kalman filter,” in Journal of Offshore and Polar Engineering, vol. 15, no. 2, jun 2005, pp. 88–95
[5 ]Tan, R. Diamant, W. Seah, and M. Waldmeyer, “A survey of techniques and challenges in underwater localization,” Accepted for Publication in the ACM Journal of Ocean Engineering
[6 ]J. Zheng and Y. Wu, “Localization and time synchronization in wireless sensor networks: A unified approach,” in
IEEE Asia Pacific Conf. on Circuits and Sys., Macao, China, Nov. 2008
[7 ]S. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory. Englewood Cliffs, NJ: Prentice-Hall, 1993.
Bibliography
Related Documents











