UNDERWATER COMMUNICATION THROUGHT MAGNETIC INDUCTION (MI) by Sana Ramadan Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia October 2017 © Copyright by Sana Ramadan, 2017 .

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

UNDERWATER COMMUNICATION
THROUGHT MAGNETIC INDUCTION (MI)
by
Sana Ramadan
Submitted in partial fulfilment of the requirements
for the degree of Master of Applied Science
at
Dalhousie University
Halifax, Nova Scotia
October 2017
© Copyright by Sana Ramadan, 2017
.

ii
TABLE OF CONTENTS
LIST OF TABLES ...................................................................................................................................................... iii
LIST OF FIGURES .................................................................................................................................................... iv
ABSTRACT ................................................................................................................................................................... v
LIST OF SYMBOLS USED ...................................................................................................................................... vi
ACKNOWLEDGEMENTS ..................................................................................................................................... viii
CHAPTER1 INTRODUCTION ............................................................................................... 1
CHAPTER2 MI COMUNICATION .................................................................................................................... 3
2.1 Related Work ..................................................................................................................................................... 3
2.2 Background ......................................................................................................................................................... 4
CHAPTER3 METHODOLOGIES .......................................................................................... 8
3.1 The Magneto Inductive Channel................................................................................................................. 8
3.1.1 The Magneto Inductive Transmitter ........................................................................................................ 8
3.1.2 The Magneto Communications Channel .............................................................................................. 11
3.1.3 The Magneto -Inductive Receiver ........................................................................................................... 21
3.2 Channel with Noise ........................................................................................................................................ 22
3.2.1 Thermal Noise .................................................................................................................................................. 15
3.2.2 Atmospheric Noise ......................................................................................................................................... 15
3.3 Channel Capacity ............................................................................................................................................ 16
CHAPTER4 RESULTS AND DISCUSSION .......................................................................... 18
4.1 MI Channel ........................................................................................................................................................ 18
4.2 Channel Attenuation ..................................................................................................................................... 21
4.3 Channel Noise .................................................................................................................................................. 26
4.4 Up-link and Downlink Operation ............................................................................................................. 30
CHAPTER5 CONCLUSION ............................................................................................................................... 43
BIBLIOGRAPHY ....................................................................................................................................................... 46

iii
LIST OF TABLES
Table 1 The boundary conditions of the near field, transition zone, and far-field ........... 17
Table 2 The results of reaching maximum distance for different frequencies in both
fresh and sea water .................................................................................................... 30
Table 3 Channel Characteristic-Seawater ..................................................................... 33
Table 4 Channel Characteristic-Fresh water ................................................................. 33
Table 5 Capacity calculations for Seawater MI communication .................................. 37
Table 6 Capacity calculation for Fresh water MI communication ................................ 38
Table 7 Channel characteristics (flat attenuation)-Seawater ......................................... 41
Table 8 Channel characteristics (flat attenuation)-Fresh water ..................................... 42
Table 9 Flat attenuation downlink (SNR)-Seawater (Example1) ................................. 43
Table 10 Flat attenuation downlink (SNR)-Fresh water (Example1) ........................... 44
Table 11 Flat attenuation uplink and downlink (SNR)-Seawater (Example2) ............. 47
Table 12 Flat attenuation uplink and downlink (SNR)-Fresh water (Example2) .......... 48
iv
LIST OF FIGURES
Figure 1 Inductive transmitter and receiver [4] .................................................................................. 12 Figure 2 Magnetic moment [5] ............................................................................................................. 13 Figure 3 Model of a magneto-inductive communication system .................................................... 16 Figure 4 Illustration of a loop antenna at the transmitter side .......................................................... 18 Figure 5 Illustration of the second loop at the receiver ..................................................................... 21 Figure 6 Skin depths as a function of frequency and conductivity for both seawater and fresh
water ................................................................................................................................................. 26 Figure 7 Induced received voltage as a function of frequency for different separation distances
between Tx and Rx ......................................................................................................................... 27 Figure 8 Induced voltages for a coaxial receiver loop as a function of frequency for different
separation distances between Tx and Rx ....................................................................................... 28 Figure 9 Distance and frequency dependent attenuation of the magneto-inductive signal for a
typical value of σ=4S/m for seawater .......................................................................................... 29 Figure 10 Illustration the channel attenuation in seawater with σ = 4s/m and in fresh water
with σ = 0.01s/m .......................................................................................................................... 31 Figure 11 System transfer function Hf with different penetration depths for both seawater and
fresh water ........................................................................................................................................ 32 Figure 12 SNR for various communication ranges and different penetration depths. ................. 35 Figure 13 SNR for seawater, figure shows two conditions when Fkϕ < 0.5, and Fkϕ > 2 ...... 36 Figure 14 Example 1 on uplink and downlink communications ..................................................... 39 Figure 15 Flat attenuation uplink (SNR)-Seawater (Example1)...................................................... 41 Figure 16 Flat attenuation uplink (SNR)-Fresh water (Example1) ................................................. 42 Figure 17 Flat attenuation downlink (SNR)-Seawater (Example1) ................................................ 44 Figure 18 Flat attenuation downlink (SNR)-fresh water (Example1) ............................................. 45 Figure 19 Example 2 for uplink and downlink communication ...................................................... 46 Figure 20 SNR comparison for up-link and downlink operation .................................................... 49

v
ABSTRACT
Wireless Underwater Communication Networks (WUCNs) have recently become a hot
topic of research due to applications such as mine detection, navigation, and pollution
monitoring. One-third of the earth’s surface is covered by water, making it a challenging
environment for communications. Acoustic waves are currently the most common
technology used in underwater communications, but this approach suffers from large
attenuation and propagation delays. Less commonly used are electromagnetic waves (EM),
which experience range limitations in water, and optical waves, which encounter
scattering. In this thesis, we will focus on magnetic induction-based communication.
Magnetic induction (MI) has several advantages compared to the commonly used acoustic,
EM, and optical communication methods. For instance, MI does not suffer from multi-path
fading or scattering, and the signal propagation delay is negligible. We will roughly
estimate the achievable range, operation frequencies, bandwidth, path loss, capacity and
distortions of the MI in conductive media such as water.
vi
LIST OF SYMBOLS USED
𝛿 Skin depth
휀 Electrical permittivity or dielectric constant
휀0 Electrical permittivity of free space ≈ 8.85 × 10−12 𝐹𝑚−1
휀𝑟 Relative permittivity
𝜆 Wavelength
𝜇 Magnetic permeability
𝜇0 Magnetic permeability of free space ≈ 4𝜋 × 10−7 𝐻𝑚−1
𝜇𝑟 Relative permeability
𝜌 Mass density
𝜎 Electrical conductivity
𝜙 Specific aperture (merit factor)
𝜔 Angular frequency, 𝜔 = 2𝜋𝑓
𝐵 Flux density
𝑐 Speed of light, ≈ 3 × 108 𝑚/𝑠
f Frequency
𝐹𝑎 Atmospheric noise temperature
𝐹𝑘 Atmospheric noise
𝐻 Magnetic field
𝑘 Boltzmann constant, ≈ 1.38 × 10−23𝐽𝑘−1
𝑘0 Wave number for free space
𝑚𝑑 Magnetic moment

vii
𝑁 Noise voltage or power
𝑆 Signal voltage or power
𝑇 Temperature [K]
𝑇𝑎 Atmospheric noise temperature
𝑍0 Wave impedance of free space, 𝑍0 = √𝜇0
0

viii
ACKNOWLEDGEMENTS
I would like to express my appreciation to my supervisor Schlegel who has
cheerfully answered my queries, provided me with materials, checked my
examples, assisted me in a myriad way with the writing and helpfully
commented on earlier drafts of this project. Also, I am very grateful to my
family and friends for their support throughout the production of this project.

CHAPTER1 INTRODUCTION
Traditional wireless networks that use EM suffer from high path loss, which limits their
communication range. To increase the EM range, a large antenna is used for low
frequencies, but this is unsuitable for small underwater vehicles. Optical waves experience
multiple scattering, limiting the application of optical signals to short-range distances.
Additionally, the transmission of optical signals requires a direct line of sight, which is
another challenge for mobile underwater vehicles and robots [10]. Radio waves suffer from
large attenuation and their range is limited to skin depth, which is associated with water
conductivity. Seawater has high conductivity, but the salinity and physical properties of
each type of seawater differ. Seawater measures around 4 S/m, whereas for pure water,
typical values range between 0.005 and 0.01 S/m [4].
Acoustic waves are widely used in underwater communication because they can travel long
distances. However, acoustic signals suffer from low bandwidth and data rates as well as
large propagation delays because the sound speed equals 1500 m/s [10]. Magnetic
induction (MI), however, is a promising solution for underwater short-range
communication.
MI technology has already proved to be a useful tool for underwater exploration. Due to
the high velocity of MI propagation, frequency offsets due to the Doppler effect are
negligible. Time-varying magnetic induction, generated by a primary coil or loop and
sensed by a secondary coil or loop, is the fundamental basis for magneto-inductive
communications. Transformers consisting of two coils positioned very close to each other
are the most common application of magnetic induction.

10
Ideally, total power is transferable from one coil to another. However, a regular magneto-
inductive communication system featuring a large distance between primary and secondary
coils rapidly experiences a power drop to a very small fraction. For this reason, coils are
usually asymmetric, meaning that the transmitter coils are large and heavy, whereas the
receiving coils are tiny and light [2]. A steering current drives the primary coil which
generates a reactive magnetic field and makes MI communication possible. By using such
a method, the energy stays local and is not transferrable at large distances that typical radio
waves can propagate. Thus, because the receiving signal strength will experience a rapid
decline over communication distance, it pushes MI communications out of the running as
an alternative to regular wireless communications.
MI communication has the potential to be used for underwater communications, as less
power loss occurs in comparison to electro-magnetic (EM) radio waves, which are rapidly
absorbed in water. From a theoretical communication perspective, MI channels do not
differ significantly from other electro-magnetic communication channels, and our
approach is generally standard in communication theory. However, there are some
differences between MI and RF communications, one of which is focusing on different
physical characteristics of the environment when developing practical channel models for
MI communications.
11
CHAPTER2 MI COMMUNICATION
MI communications use low-frequency modulation to enable reliable communication in
areas where traditional radio-frequency (RF) communications fails. These environments
include areas with a high concentration of conductive elements, through highly reflective
barriers such as the surface of water and communicating through the earth. So far, MI
communications has been limited to short ranges and low data rates but shows promise for
providing high-data throughput at short ranges. The communication scenario provides
unique opportunities and challenges. Additionally, given the nature of MI, it has not been
fully explored, which means that current systems operate far below capacity.
2.1 Related Work
Magnetic induction was first introduced as an underwater tool in [6], which featured a high-
speed link over a short range. In [8] and [1], underwater magneto-inductive networks were
analyzed using mutual coupling. Developing a model for magneto-inductive
communication was addressed in [7] by demonstrating the coupling between the coils in
the near field. In [3], a narrow bandwidth of a few KHz was reported because of the high
Q-factor (quality factor) of the magnetic coils. To expand the bandwidth [3], the front-end
resonant frequency was modulated in [14]. In [10], tuned resonant circuits (narrowband)
or unturned circuits (wideband) were applied to achieve high efficiency. Most of the
literature, such as [13], [9] and [12], demonstrates channel modeling from an end-to-end
perspective. So, for example, they focus not only the channel medium but also

12
on the characteristics of the transceiver and the coils. In this study, we focus on the channel
as a medium.
2.2 Background
“Near field magnetic induction system is a short-range wireless physical layer that
communicates by coupling a tight, low-power, non-propagating magnetic field between
devices. The concept is for a transmitter coil in one device to modulate a magnetic field
which is measured by means of a receiver coil in another device” [4]
In magneto inductive communications system, the distance of coils is usually larger, and
transferred power drops off sharply to a very small fraction, so the coils should be
asymmetric, which the transmitter coil being heavy and large, and the receiver coils being
light and small. We are working in conductive media such as water, where the electrical
conductivity 𝜎 leads to energy dissipation of the material because of the eddy current
which generates strong secondary field. Electrical conductivity gives a measure of a
material’s ability to conduct an electric current.
Figure 1 Inductive transmitter and receiver [4].

13
The principle of magnetic induction is the current in the primary coil (transmitter) generates
magnetic field then the magnetic field induces current in to secondary coil (receiver).
Magnetic flux is a general term associated with a field that is bound by a certain area. So,
magnetic flux is any area that has a magnetic field passing through it. Electron has a
magnetic dipole moment. It's close to an electric dipole moment because it generates a
magnetic field that behaves similarly to an electric dipole field (falls off like 1 /r3). The
lowest order moment possible in magnetism that obeys Maxwell's equations is the dipole
moment.
Figure 2 Magnetic moment [5].
According to Figure 2 When the current (I) traveling around the edge of a loop of cross
sectional area (A=𝜋𝑟2,where 𝑟 is the loop radius), the magnetic moment will produce. The
physics formula for calculating the dipole moment of a flat current carrying loop of wire
is:
𝑚𝑑 = 𝑁𝐼𝐴 (1)
14
where 𝐼 is the current (Amperes) in the 𝑁 turns, 𝐴 is the area (m2) of the loop, and 𝑁 is the
number of windings in the coil. The magnetic dipole moment (𝑚𝑑 ) is a vector whose
direction is perpendicular to A and determined by the right-hand rule. Thus, the unit of
magnetic moment is (A m2).
From (2), magnetic moment can be increased by increasing either𝑁, 𝐼, 𝐴. However, by
increasing 𝑁 leads to more coupled core loss, as well as by increasing𝐼, resulting more
power losses (𝐼2𝑅), also, increasing cross section area 𝐴, can lead to increase diameter and
large antenna size is not practical for most applications. To increase magnetic field
strength 𝐻, magnetic moment 𝑚𝑑 could be enhanced by using magnetic permeability of
the coil, given as,
𝑚𝑑 = 𝜇𝑒𝑁𝐼𝐴 (2)
Magnetic permeability 𝜇 determines the extent of magnetization obtained by the material
in the presence of an external magnetic field and denoted by 𝜇 = 𝜇0𝜇𝑒, where 𝜇0 is the
permeability of free space, while 𝜇𝑒 is relative permeability of material, which various
depending upon material type.
Clearly that magnetic moment depends on the number of turns, however the magnetic
moment in relation to the mass and diameter, it is independent of the number of turns. For
example, if we considering two magnetic loops A and B, loop A has 100 turns of wire,
carrying a current of 4 A, with resistor 2Ω. we will compare loop A with loop B, where
loop B has 500 turns and assuming both of loops have an identical mass.so loop B will
15
have five times the length of wire and resistance will be 25 times greater that is because
five times greater due to length and another five times greater due to small cross section
area. So, to get the same magnetic moment as loop A, it needs only 1/5 of the current (i.e.
0.8 A). Resulting in power dissipation 𝐼2𝑅 for loop A is 32w as well as for loop B is 32w.
The magnetic field strength =𝑚𝑑
4𝜋𝑟3 , at a coaxial point at distance 𝑟 from the loop antenna
is proportional to the magnetic moment and decreases with the third power of 𝑟. Magnetic
field strength can be increased by increasing magnetic moment.

16
CHAPTER3 METHODOLOGIES
The methodologies we are adapting here quite standard in the field of communication
theory.
3.1 The Magneto Inductive Channel
The MI channel fundamentally includes the MI transmitter, the magnetic channel in
conductive media, and the MI receiver. These are shown in the block diagram in Figure 3
and discussed individually below.
Figure 3 Model of a magneto-inductive communication system.
3.1.1 The Magneto Inductive Transmitter
An inductive loop is the most practical and efficient way to generate a magnetic field [2].
The magnetic field from the loop antenna falls into the following three regions: the near
field region, in which the field is described by quasi-static equations and there is no
significant radiation as the electric and magnetic fields are in phase quadrature; the far
field, which represents the region where the electric and magnetic fields are in phase and
where

17
the magnetic field peels off as a propagating electro-magnetic wave; and the transition
region, which is located between the near and far field regions [2].
Table 1 Showing the boundary conditions of the near field, transition zone, and far-
field.
As we can see from Table 1 boundary conditions of the three regions using two common
measures (wavenumber |𝒌𝟎|and skin depth 𝜹), where is the 𝑻 the ratio of distance to skin
depth, given as 𝑻 =𝐫
𝛅 and 𝒌𝟎 =
𝟐𝛑𝐟
𝐜. We are primarily interested in the near field, for which
𝐫 < 𝛅 and
T =r
δ< 1 (3.1)
where r is the operating distance and T is skin depth numbers.
The magnetic near-field decays with the inverse cube of the distance. According to the Biot
– Savart Law, the magnetic field from a small element is proportional to (1
𝑟3).
𝑩 =𝝁𝟎
𝟒𝝅∫ 𝑰
𝒅𝑰×𝒓
𝒓𝟑 (3.2)
where 𝐵 is the flux density and 𝐼 is the current (see Figure 4).
Properties
Near–field
approximation
Transition region
approximation
Far-field
approximation
Skin depth 𝑇 ≪ 1 𝑇2 ≪ 1 𝑇 ≫ 1
Wave number 𝑘0𝑟 ≪ 1 (𝑘0𝑟)2 ≪ 1 𝑘0𝑟 ≫ 1

18
Figure 4 Illustration of a loop antenna at the transmitter side.
The magnetic field strength for induction at a distance r from the loop antenna is
proportional to the magnetic moment and decreases with the third power of 𝑟, given by
H =md
4πr3 (3.3)
where 𝑚𝑑 is the magnetic moment for a circular loop antenna given by
𝒎𝒅 =𝒅𝒕
𝟒√𝑴
𝝈
𝝆√𝒑 = 𝝓𝒕√𝒑 (3.4)
𝑝 is the dissipated power, and 𝜙𝑡 is the antenna merit factor, given by
𝝓𝒕 =𝒅𝒕
𝟒√𝑴
𝝈
𝝆 . (3.5)
In the above, 𝜙𝑡 depends on the mass 𝑀of the coil, the diameter𝑑𝑡, the electrical properties
of the wire material, which are the conductivity 𝜎 , and the material density 𝜌 . These
parameters are collected in the antenna merit factor 𝜙𝑡, which has dimensions m2/√Ω. The
magnetic moment also depends on the dissipated power 𝑝, but does not depend on the
number of turns [3].
19
For example, consider a portable induction loop antenna, where the diameter is 1m and
mass is 0.6 Kg. If we take into account that the loop is made from copper √𝜎
𝜌 =8m/Kg√Ω,
the magnetic moment is 50 Am2 with a power dissipation of 10 w.
The 𝐻-field is directly proportional to the loop current. Hence, since the power loss in the
antenna (which is due to ohmic resistance) is also directly proportional to the loop current,
there is no fundamental preference of frequency [2].
3.1.2 The Communications Channel
Communication through conductive media such as seawater is possible only over distances
of a few skin depths. The skin depth gives a measure of the penetration of magnetic field
into a given medium. The magnetic field decays with distance into the medium, and this
decay of the field is expressed by the skin depth, given by [3]
𝜹 = √𝟐
𝝎𝝁𝝈 (3.6)
where:
𝜇 = 4𝜋 × 10−7 𝑁 𝐴−2⁄ (Magnetic permeability in vacuum)
𝜔 = 2𝜋𝑓 (Angular frequency)
𝜎 : Electrical conductivity in siemens/meter
The penetration of the magnetic field into the conductive medium obeys Maxwell’s
equations:
△× 𝑯 = (𝒋𝝎𝜺 + 𝝈). (Ampere’s law) (3.7)
20
Electromagnetic waves in a vacuum obey a standard type of partial differential equation
(PDE) called the "wave equation". However, in a conductive medium, where the angular
frequency is much less than sigma/epsilon, they obey a different type of partial
differential equation, known as the "diffusion equation".
If ω ≪ σ ϵ,⁄ the propagation equation of the magnetic field turns into the diffusion
equation, which means diffusion properties of electromagnetic waves are mainly
dependent on the conductivity and propagation behavior of the wave is an important aspect
of time.
△𝟐 𝑯 = 𝒋𝝎𝝁𝝈𝑯. (3.8)
The magnetic field is attenuated according to the skin depth. In a good conductor with
(𝜎
𝜔≫ 1) , such as seawater, a large skin depth attenuation is experienced. If we assume
an operating frequency of 1 MHz, the skin depth for seawater is 0.25m with a wavelength
of 1.6m. This means the frequency within the LF (30-300 kHz) or the VLF (3-30 kHz)
bands would be the most optimal, as skin depth is inversely proportional to the square root
of the frequency used.
A basic model for the magnetic field penetration consists of a cubic distance attenuation
combined with an exponential absorption loss given by [2]
|𝑨(𝝎, 𝒓)| =𝐐(𝐓)
𝟒𝛑𝐫𝟑 . (3.9)
The attenuation Q(T) represents the exponential medium losses at a rate of 8.7 dB per skin
depth. It is frequency-dependent, since δ is frequency-dependent and has general low-pass
characteristics. It is given by
𝑄(𝑇) = 2𝑒−𝑇√𝑇2 + (1 + 𝑇)2. (3.10)

21
The total absorption is the combination the cubic distance attenuation of (3.9) and the
exponential absorption loss in (3.10).
3.1.3 The Magneto -Inductive Receiver
A receiver for magneto -inductive communications basically consists of a secondary loop
antenna that is coupled with the first loop antenna [3].
Figure 5 Illustration of the second loop at the receiver.
The induced voltage in a receiver coil via Faraday's law due to the AC magnetic flux
density produced by a magnetic dipole source as a function of frequency, distance and
material parameters, is given by
𝑼(𝒇) = 𝟐𝝅𝒇𝝁𝑯𝝓𝒓 (3.11)
where 𝐻 is the magnetic field component at the receive loop and 𝜙𝑟is the receiver antenna
loop merit factor. The induced voltage also depends on magnetic permeability 𝜇 = 𝜇𝑒𝑓𝑓𝜇0,
where 𝜇0 is the magnetic permeability of free space ≈ 4𝜋 × 10−7 Hm-1, and 𝜇𝑟 = 1
because most of the materials are not ferromagnetic.

22
In a good conductor with (𝜎
𝜔≫ 1), and if the communication range is within the near field,
(𝑇 ≪ 1), the optimal frequency for a given distance r is given by
𝑓 =𝑇2
𝜋𝑟2𝜇𝜎 . (3.10)
by substituting (3.12) in (3.11) to derive the induced voltage in a coaxial receiver loop as
Uinduced ≈ ϕ√Rmd
2πσ .
1
r5 T2 Q(T) . (3.11)
As the frequency goes to zero, the skin depth 𝛿 becomes large and T→ 0 so the induced
voltage tends to zero. This is due to the lack of magnetic induction at frequency 0.
Likewise, at a high frequency, 𝛿 becomes small and T → ∞ so e−T → 0. As a result, there
is no signal because of the greater degree in skin depth attenuation [3].
3.2 Channel with Noise
The term ‘noise’ refers to unwanted electrical signals that are always present in electrical
systems. Signal transmission through any channel suffers from additive noise, which can
be generated internally by the components such as resistors and solid-state devices used to
implement the communication system. This is called thermal noise. Such noise can also be
generated externally as a result of interference from other channel users. Noise is one of
the limiting factors in a communication system because when noise is added to the signal,
it is impossible to transmit a near infinite amount of information over a finite bandwidth
communication system.
23
3.2.1 Thermal Noise
Thermal noise is generated due to the random movement of electrons inside the volume of
conductors or resistors even in the absence of electric field. If the noise at the receiver is
purely thermal, its normalized noise power spectral density is given by:
𝑁(𝑓) = 4𝑘𝑇 (3.14)
where k = 1.38 × 10−23 J/K is Boltzmann’s constant, and T is the receiver temperature in
Kelvin [2].
3.2.2 Atmospheric Noise
Atmospheric noise is a collective term of all noise sources that are not local thermal. A
typical example of atmospheric noise is receiver noise. It may be caused by the electrical
activity in the atmosphere as well as by man-made electrical disturbances. In lower
frequency ranges, ambient noise is picked up by the antenna, especially if the antenna is at
the surface and dominates over thermal noise. Therefore, it is preferable to use a noise
model that is analogous to the thermal noise. In the following, we define the atmospheric
noise power density as
𝑁(𝑓) = 4𝑘𝑇𝐹𝑎(𝑓) 𝑅𝑟 𝑅 ⁄ (3.15)
where Rr is the radiation resistance of the antenna, R is the ohmic resistance of the receiver
coil, and 𝐹a is the atmospheric noise temperature given by

24
𝐹𝑎(𝑓) =6𝜋
𝑘02
𝑍0𝐻2
4𝑘𝑇 (3.16)
where k0 is the wave number and is equal to k0 =2πf
c (where 𝑐 is the speed of light) and
Z0 is the impedance of free space. Z0 also equals the ratio of the electric field component
to the magnetic field component Z0 =|E|
|H| and is approximately 377 Ohm.
We can use (3.16) to deliver the atmospheric noise as a function of frequency and
atmospheric noise temperature in the following
𝐹𝑘 = √𝐹𝑎𝑍0𝑘0
4
6𝜋 (3.17)
20𝑙𝑜𝑔𝐹𝑘 = 10𝑙𝑜𝑔𝐹𝑎 + 40𝑙𝑜𝑔𝑓 − 294.147 (3.18)
3.3 Channel Capacity
Long before wireless communication dominated our daily lives, research had established
fundamental limits on the rate at which we could communicate over wireless channels. One
of the most important theorems is the Shannon capacity theorem, which sets an upper
bound on how fast we can transmit information over a particular wireless link. There is no
way to exceed this theoretical upper bound, but we can get close to it.
The Shannon capacity formula for a flat channel with white Gaussian noise is given by
𝒄 = 𝒘𝒍𝒐𝒈𝟐(𝟏 +𝒔
𝑵) (3.19)
where w is Bandwidth in (Hz) , and 𝑆
𝑁 is the signal –to- noise ratio.

25
The capacity is directly proportional to the bandwidth. If we have a wider bandwidth to
communicate, we can send more data. This is important because we will look at how
bandwidth is allocated in terms of different frequency bands.
We can generalize instances of frequency-dependent signals and noise spectral powers
𝑆(𝑓) and 𝑁(𝑓) in the following way:
𝑐 = ∑ △ 𝑓 log (1 +𝑆(𝑓1+𝑖△𝑓)△𝑓
𝑁(𝑓1+𝑖△𝑓)△𝑓)𝑁
𝑖=0 → ∫ log (1 +𝑆(𝑓)
𝑁(𝑓))
𝑓2
𝑓1𝑑𝑓 (3.20)
where f1 is the lower band edge, f2=f1+𝑁𝛿f is the upper band edge, and f2-f1=w is the
channel bandwidth.

26
CHAPTER4 RESULTS AND DISCUSSION
In this study, all the graphs are done by using Matlab software and some of our results are
summarized into tables.
4.1 MI Channel
Frequency should be as low as possible to avoid eddy current which produce strong
secondary field. skin depth is frequency dependent (3.6), so in Figure 6 will show the
skin depth as a function of frequency for seawater (𝜎 = 4𝑆/𝑚) and fresh water (𝜎 =
0.01𝑆/𝑚).
Figure 6 Skin depths as a function of frequency and conductivity for both seawater and
fresh water.
Frequency (Hz)10
110
210
310
410
5
skin
de
pth
(m
)
10-1
100
101
102
103
104
skin depth vs. Frequency - for different conductivity
conductivity=4S/mfresh waterconductivity=0.01S/m
27
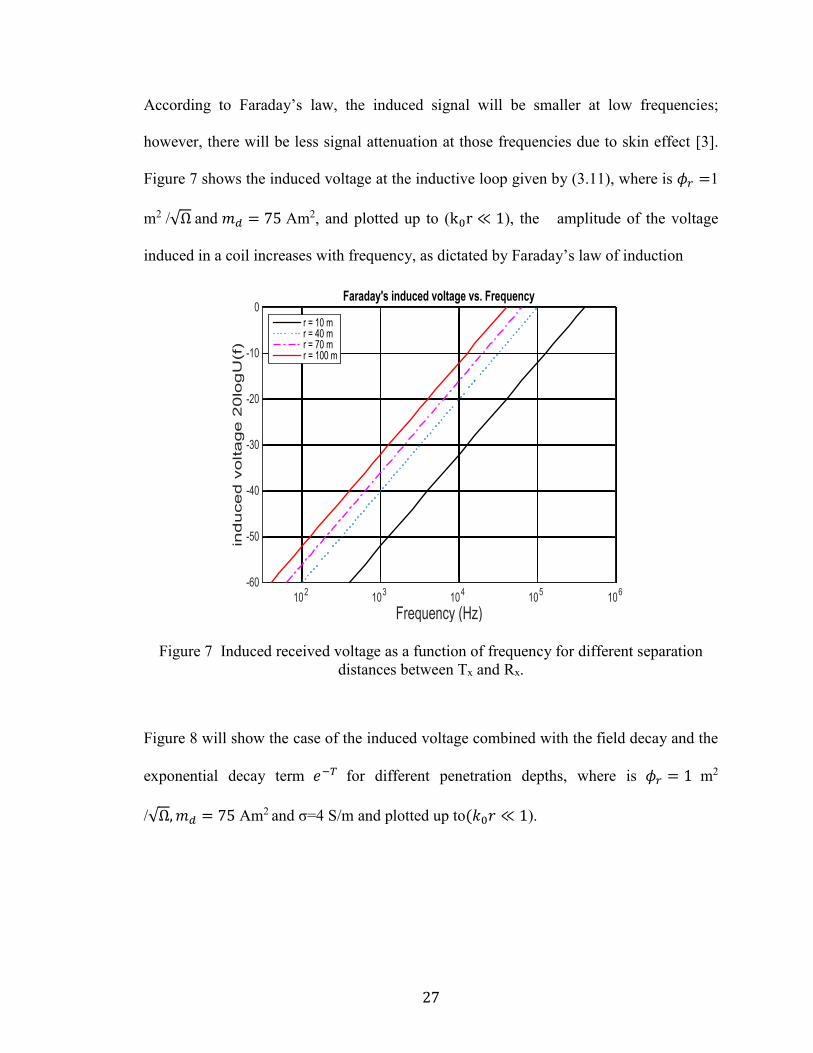
According to Faraday’s law, the induced signal will be smaller at low frequencies;
however, there will be less signal attenuation at those frequencies due to skin effect [3].
Figure 7 shows the induced voltage at the inductive loop given by (3.11), where is 𝜙𝑟 =1
m2 /√Ω and 𝑚𝑑 = 75 Am2, and plotted up to (k0r ≪ 1), the amplitude of the voltage
induced in a coil increases with frequency, as dictated by Faraday’s law of induction
Figure 7 Induced received voltage as a function of frequency for different separation
distances between Tx and Rx.
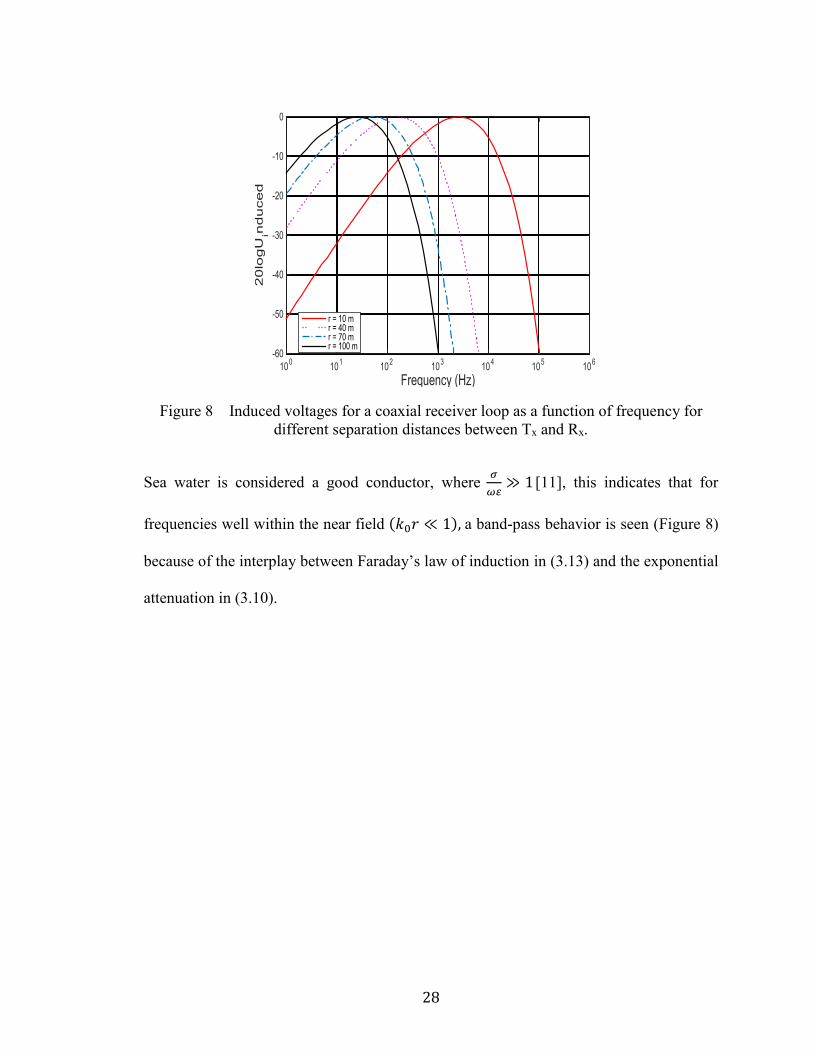
Figure 8 will show the case of the induced voltage combined with the field decay and the
exponential decay term 𝑒−𝑇 for different penetration depths, where is 𝜙𝑟 = 1 m2
/√Ω, 𝑚𝑑 = 75 Am2 and σ=4 S/m and plotted up to(𝑘0𝑟 ≪ 1).
Frequency (Hz)10
210
310
410
510
6
ind
uce
d v
olta
ge
20
log
U(f)
-60
-50
-40
-30
-20
-10
0Faraday's induced voltage vs. Frequency
r = 10 mr = 40 mr = 70 mr = 100 m
28
Figure 8 Induced voltages for a coaxial receiver loop as a function of frequency for
different separation distances between Tx and Rx.
Sea water is considered a good conductor, where 𝜎
𝜔≫ 1 [11], this indicates that for
frequencies well within the near field (𝑘0𝑟 ≪ 1), a band-pass behavior is seen (Figure 8)
because of the interplay between Faraday’s law of induction in (3.13) and the exponential
attenuation in (3.10).
Frequency (Hz)10
010
110
210
310
410
510
6
20
log
Uin
duced
-60
-50
-40
-30
-20
-10
0
r = 10 mr = 40 mr = 70 mr = 100 m
29
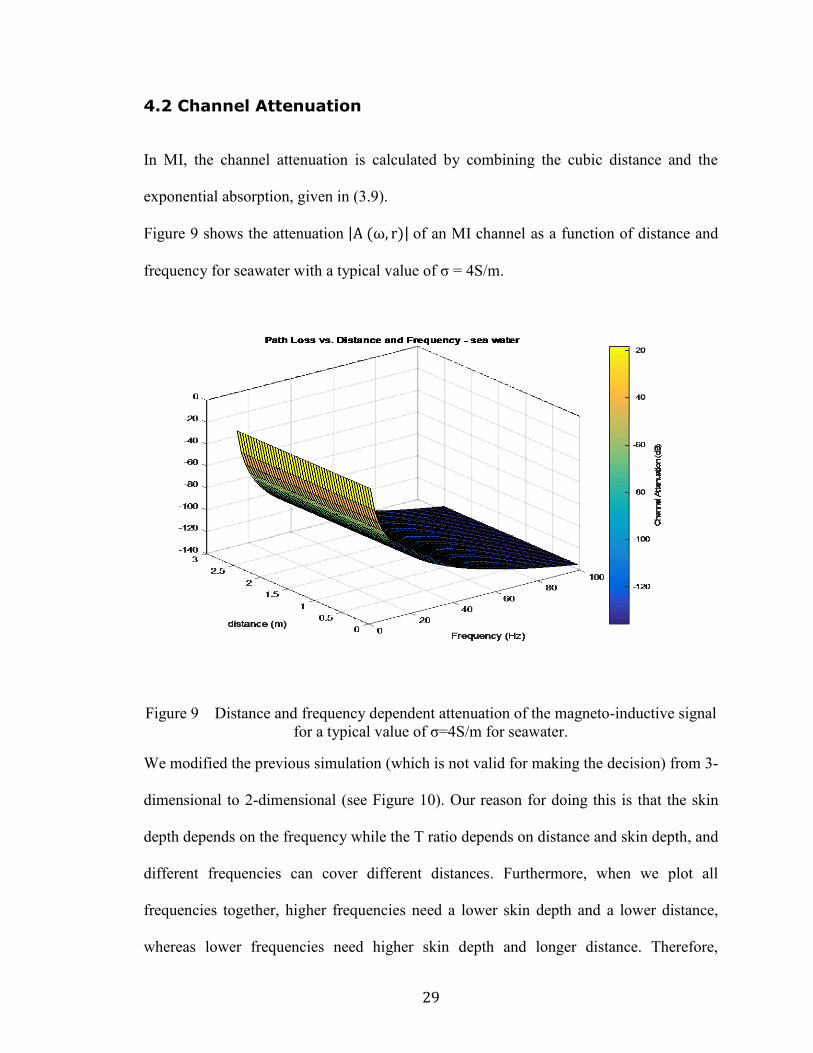
4.2 Channel Attenuation
In MI, the channel attenuation is calculated by combining the cubic distance and the
exponential absorption, given in (3.9).
Figure 9 shows the attenuation |A (ω, r)| of an MI channel as a function of distance and
frequency for seawater with a typical value of σ = 4S/m.
Figure 9 Distance and frequency dependent attenuation of the magneto-inductive signal
for a typical value of σ=4S/m for seawater.
We modified the previous simulation (which is not valid for making the decision) from 3-
dimensional to 2-dimensional (see Figure 10). Our reason for doing this is that the skin
depth depends on the frequency while the T ratio depends on distance and skin depth, and
different frequencies can cover different distances. Furthermore, when we plot all
frequencies together, higher frequencies need a lower skin depth and a lower distance,
whereas lower frequencies need higher skin depth and longer distance. Therefore,

30
integrating both high and low frequencies in the same plot and ensuring that all are “near-
field” regions means that we should stick to the simulation of the lowest distance, which
can be accessed by the highest frequencies. Thus, we changed the code and performed the
simulation for different frequencies over a distance that can meet near-field criteria.
The simulations in Table 2 were done using the MATLAB script “SkinDepth -
Equ_88_v2.m” and all results are stored in the “MI figures” folder. Table 2 reflects the
essence of these results, showing the maximum distance reachable in seawater and fresh
water for different frequencies. It is worth noting that the 𝑇 ratio is set at 𝑟 < 0.2𝛿 in order
to ensure that the simulations and results are in the near field. There is a possibility to obtain
better distance if we compromise the ratio 𝑇 with higher values.
Table 2 The results of reaching maximum distance for different frequencies in both
fresh and sea water, and in the near-filed region (𝐓=0.2).
f =
1
(Hz)
f =
10
(Hz)
f =
100
(Hz)
f =
1,000
(Hz)
f =
10,000
(Hz)
f =
100,000
(Hz)
f =
120,000
(Hz)
f =
140,000
(Hz)
Max depth
penetration in
Seawater (m)
50 16 5 1.6 0.5 0.16 0.14 0.13
Max depth
penetration in
Fresh water
(m)
1000 320 100 32 10 3.3 2.9 2.7
The maximum frequency for staying in the near-filed in fresh water is around 145 kHz,
since increasing the frequency might push 𝑇 out of near field. However, the maximum
frequency for staying in near-field for sea water could be more than 1 MHz or higher, as
sea water does not have the limitation of fresh water; however, the range will be reduced
and cannot be considered as an option for communication.

31
Figure 10 Illustration the channel attenuation in seawater with 𝝈 = 𝟒𝒔/𝒎 and in fresh
water with 𝝈 = 𝟎. 𝟎𝟏𝒔/𝒎.
The proper range for communication under water could be achieved at lower frequencies,
but the attenuation is too great and an acutely sensitive receiver might be needed. If we set
the maximum attenuation to -60 dB, the best option for communication will be frequencies
up to 10 kHz, The achievable communication range is around 10 meters for fresh water
and around 10 Hz with achievable distances of around 5 meters in sea water (These results
are observable from the MI figures named s1, f1, s10, f10, s1000, f1000, etc. located in MI
figures folder).
By studying the simulations in this phase, we can verify the fact that the channel has a
strong low-pass characteristic, especially at larger distances.
In terms of channel attenuation, simulations in Figure 11 show the result for both sea and
fresh water. The antenna merit factor product equals 100, inclusive, in that 𝜙𝑡 = 100 m2
/√Ω and 𝜙𝑟 = 1 m2 /√Ω, with reference transmit power of 1 W.
Distance (m)0 2 4 6 8 10 12
att
enu
atio
n (
dB
)
-100
-50
0
50
100
150Path loss Vs distance and Frequency
10Hz
10 KHz
SeaWater
FreshWater

32
Figure 11 System transfer function 𝑯(𝒇) with different penetration depths for both
seawater and fresh water.
In Figure 11, for both seawater and fresh water, atmospheric noise refers to atmospheric
noise temperature. The reference power is also 1 w (0 dBW). It should be noted that the
optimal transmission range depends on the received SNR, which itself depends on the
transfer function as a distance dependent factor (more distance, more attenuation) and the
transmitter power. We can see this by looking at Figure 11 and setting the first necessity
as a channel with a flat bandwidth. Tables 4 and 5 reflect the details of the channel
bandwidth over different ranges of communications for sea and fresh water, respectively.
The bandwidth has been calculated using Figure 11. The -3dB bandwidth occurs when the
channel attenuation drops for 3dB from its value at f=1KHz. So, for example, for seawater
with a communication range of 100m, the attenuation at f=1Hz is -101.5 dB. Thus, the -
3dB bandwidth occurs when the attenuation drops an extra 3dB(-101.5 –3 = -104.5 dB).
The point (around 10 Hz) can be found in Figure 10. By performing the same calculations
for all frequencies in both seawater and fresh water, the results would be as shown in Tables
Frequency (Hz)10
010
110
210
310
410
510
6
H(d
B)
-300
-250
-200
-150
-100
-50
0Transfer Function (Channel)-Sea Water and Fresh Water
100m200m300m400m500mAtmospheric Noise
SeaWater
FreshWater

33
4 and 5. The channel attenuation is considered the channel attenuation at -3dB point, which
is 3dB less than the attenuation at f=1 Hz.
Table 3 Channel Characteristic-Seawater.
Communication Range
(m)
Bandwidth
(Hz)
Channel Attenuation
(dBW)
100 10 -101.5-3=-104.5
200 2 -115.9-3=-118.9
300 <1 -127.3-3=-130.3
400 <1 -137.6-3=-140.6
500 <1 -147.3-3=-150.3
Table 4 Channel Characteristic-Fresh water.
Communication Range
(m)
Bandwidth
(Hz)
Channel Attenuation
(dBW)
100 100000 -99.01-3=-102.1
200 10000 -108.1-3=-111.1
300 2000 -113.4-3=-116.4
400 900 -117.1-3=-120.1
500 800 -120.1-3=-123.1
As we can see by comparing Tables 3 and 4, a very good bandwidth could be achieved in
fresh water communication.

34
4.3 Channel Noise
The signal-to-noise ratio (SNR) is an important coefficient to determine a system’s
performance. The SNR at the receiver loop given by
𝑆
𝑁|
𝑡ℎ𝑒𝑟𝑚𝑎𝑙+𝑎𝑡𝑚𝑜𝑠ℎ𝑒𝑟𝑖𝑐
=𝜔𝜇𝐻
√4𝑘𝑇𝐵𝜙 √1 + (𝜙𝐹𝑘)2⁄ . (4.1)
In (4.1), we can clearly see that there are two conditions to calculate the SNR. First, if the
antenna is too small (which means the merit factor 𝜙 is extremely small), the thermal noise
dominates over the atmospheric noise and the atmospheric part of the noise can be ignored.
Second, if the antenna is very large, the specific aperture will be large. Atmospheric noise
must be taken into account because it has a strong effect on system performance.
1) When 𝐹𝑘𝜙 <1
2 , the SNR will approximately be given by
𝑆
𝑁|
𝑡ℎ𝑒𝑟𝑚𝑎𝑙+𝑎𝑡𝑚𝑜𝑠ℎ𝑒𝑟𝑖𝑐
≈𝜔𝜇𝐻
√4𝑘𝑇𝐵𝜙 . (4.2)
2) When 𝐹𝑘𝜙 > 2, the SNR is given by
𝑆
𝑁|
𝑡ℎ𝑒𝑟𝑚𝑎𝑙+𝑎𝑡𝑚𝑜𝑠ℎ𝑒𝑟𝑖𝑐
≈𝜔𝜇𝐻
√4𝑘𝑇𝐵𝐹𝑘⁄ . (4.3)
From (4.3), we note that the SNR is independent of the merit factor 𝜙.

35
Figure 12 demonstrates the SNR (4.1) by considering both thermal and atmospheric noise
for various communication ranges and different distances. The assumption of the antenna
merit factor is 50 m2 /√Ω and the reference transmit power is 1 W.
Figure 12 SNR for various communication ranges and different penetration depths.
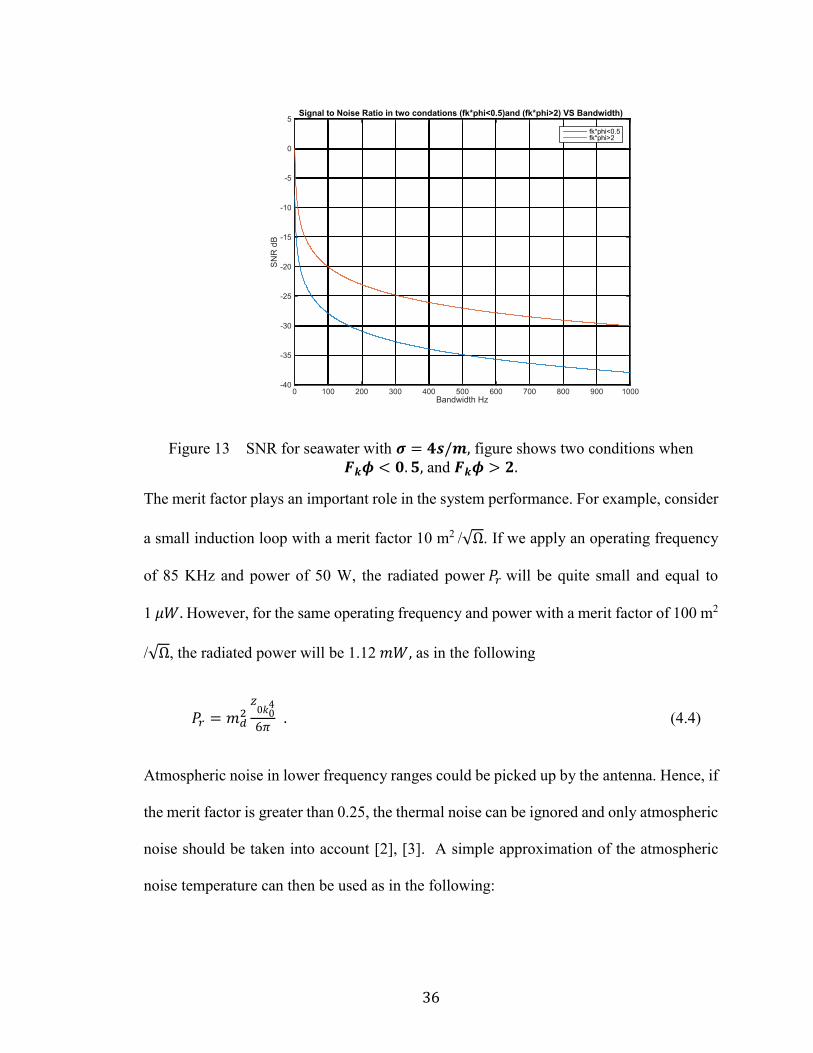
Figure 13 shows the SNR for various communication ranges. Both (4.2) and (4.3) use a
merit factor of 50 m2 /√Ω, and reference transmitter power of 100 W. With the factor √𝜌
𝜎=
117.
Bandwidth Hz0 100 200 300 400 500 600 700 800 900 1000
SN
R d
B
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10
r=50mr=100mr=150mr=200m
36
Figure 13 SNR for seawater with 𝝈 = 𝟒𝒔/𝒎, figure shows two conditions when
𝑭𝒌𝝓 < 𝟎. 𝟓, and 𝑭𝒌𝝓 > 𝟐.
The merit factor plays an important role in the system performance. For example, consider
a small induction loop with a merit factor 10 m2 /√Ω. If we apply an operating frequency
of 85 KHz and power of 50 W, the radiated power 𝑃𝑟 will be quite small and equal to
1 𝜇𝑊. However, for the same operating frequency and power with a merit factor of 100 m2
/√Ω, the radiated power will be 1.12 𝑚𝑊, as in the following
𝑃𝑟 = 𝑚𝑑2
𝑧0𝑘0
4
6𝜋 . (4.4)
Atmospheric noise in lower frequency ranges could be picked up by the antenna. Hence, if
the merit factor is greater than 0.25, the thermal noise can be ignored and only atmospheric
noise should be taken into account [2], [3]. A simple approximation of the atmospheric
noise temperature can then be used as in the following:
Bandwidth Hz0 100 200 300 400 500 600 700 800 900 1000
SN
R d
B
-40
-35
-30
-25
-20
-15
-10
-5
0
5Signal to Noise Ratio in two condations (fk*phi<0.5)and (fk*phi>2) VS Bandwidth)
fk*phi<0.5fk*phi>2

37
𝑁(𝑓) = 4𝑘𝑇𝐹𝑎(𝑓)𝜙2 𝑘0𝑍0
4
6𝜋 (4.5)
where 𝑍0 = √𝜇
𝜖≈ 377Ω, and 𝑘0 =
2𝜋𝑓
𝑐 by substituting the constants into (4.5). Thus, the
modified equation will be:
𝑁(𝑓)𝑑𝐵 = 10𝑙𝑜𝑔10(6.1633 × 10−50 × 𝑓4) + 10𝑙𝑜𝑔10(𝜙2) + 𝐹𝑎(𝑓)(𝑑𝐵) (4.6)
We can calculate the SNR by using (Power_rx = Power_tx + Channel attenuation) and
Power_noise = Power_atmospheric_noise. This degrades the “Power_rx” by 30 dBW,
where Power_tx = 1 w, which is 0 dB (see Tables 5 and 6).
By finding the SNR, we can calculate the capacity from the Shannon capacity formula for
a flat channel with white Gaussian noise (3.6).
Table 5 Capacity calculations for Seawater MI communication.
Communication
Range
(m)
S (dB)
P_tx +
Channel
Attenuatio
n
N (dB)
Atmospheric
noise
SNR
Bandwidth
W
𝐂
(bps)
100 0 -104.5 ~ -154 49.5 10 ~ 164
200 0 -118.9 ~ -157 38.1 2 ~ 25
300 0 -130.3 < -158 < 27.7 <1 < 9
400 0 -140.6 < -158 < 17.4 <1 < 5
500 0 -150.3 < -158 < 7.70 <1 < 2

38
Table 6 Capacity calculation for Fresh water MI communication.
Communication
Range
(m)
S (dB)
P_tx +
Channel
Attenuation
N (dB)
Atmospheric
noise
SNR
Bandwidth
W
𝑪
(bps)
100 0-102.1 ~ -140 37.99 100000 315,510
200 0-111.1 ~ - 143 31.90 10000 48,326
300 0-116.4 ~ -145 28.6 2000 15,946
400 0-120.1 ~ -146 25.9 900 6938
500 0-123.1 ~ -147 23.9 800 3639
Note that the Capacity and communication range are significantly better for fresh water
communication.
4.4 Up-link and Downlink Operation
The main impact of atmospheric noise is on uplink and downlink operations, with the effect
being different for the uplink compared to the downlink. Specifically, in the uplink, the full
value of atmospheric noise will be present, while in the downlink, atmospheric noise will
attenuate as 8.7 per skin depth.
In this example (Figure 14), we will consider communication between a boat located on
the surface and diver carrying the other coil. The maximum depth for divers to
communication will be 50m.

39
Figure 14 Example 1 on uplink and downlink communications.
The merit factor based on [2][3] should be greater than 0.25, so we can ignore the thermal
part of the noise and 𝐹𝑎(𝑓)(𝑑𝐵) = 294.15 − 36 log(𝑓). Hence, to obtain a merit factor of
at least 0.25, we can choose antennas as below
Boat antenna specifications: r=2m, M= 4 Kg, √𝜎𝜌⁄ = 50, which can give us ∅𝑏 = 100
Diver antenna specifications: r=0.1m, M= 1 Kg, √𝜎𝜌⁄ = 20, which can give us ∅𝑑 = 1
So, in this case, ∅ = ∅𝑏 × ∅𝑑 = 100, which is greater than 0.25, and all assumptions and
approximations are valid. Because the merit factor is collected the diameter, mass and
material parameters so if merit factor is small that means loop antenna is small and in this
case, we can ignore atmospheric noise taking in our account just thermal noise, however,
if merit factor is big meaning that antenna size is big and we can ignore thermal noise
because to its insignificant against atmospheric noise.

40
The communication range is maximum 50m, and since we are working in near-field and
T<<1 (T=0.2 in our MATLAB code), T =r
δ<< 1, as we assumed 0.2 during our previous
simulations.
Next, in finding 𝛿 =50
0.2= 250 m, we need to find the maximum working frequency 𝛿 =
√2
𝜔𝜇𝜎. By making frequency the main subject, we will have =
1
𝜋𝛿2𝜇𝜎 ; if we solve it, we
will get maximum frequencies for fresh and seawater, as below:
The minimum working frequency for seawater = 2 Hz, while the minimum working
frequency for fresh water = 406 Hz.
Basically, for data communication or even voice communication, the actual situation is
when the channel offers a flat attenuation over the transmitted signal bandwidth; however,
in reality, achieving a flat attenuation is not possible, as attenuation is frequency-
dependent. Therefore, we will first offer a solution for strict flat attenuation, and then we
will modify it to the real situation when the channel can be considered, even when it
experiences a steep roll off. In the latter case, the transmitter power and the SNR can gauge
the communication range and bandwidth. On the receiver side, some type of channel
equalization will definitely be needed; however, this is outside the scope of the present
topic.
To sum up, the first scenario needs a simple receiver, but it has a limited transmission
bandwidth, whereas the latter scenario can offer a better communication bandwidth at
expense of receiver complexity.
The uplink system presents the full value of atmospheric noise to the receiver. The diver
coil transmission power is 0 dB for initialization, giving the following calculations:

41
Channel loss (which consists of a cubic distance attenuation combined with an
exponential absorption loss due to skin depth) calculation by using MATLAB
(SkinDepth _Equ_88_V4.m). The results are shown in tables below.
Figure 15 Flat attenuation uplink (SNR)-Seawater (Example1).
Table 7 Channel characteristics (flat attenuation)-Seawater.
Communication
Range
(m)
Bandwidth
(Hz)
Channel
Attenuation
(dB)
10 > 1000 < -69.02 -3=-72.02
20 810 -78.12-3=-81.12
30 284 -83.53-3=-86.53
40 132 -87.48-3=-90.48
50 73 -90.64 – 3 = -93.64
Frequency (Hz)10
010
110
210
3
H(d
B)
-300
-250
-200
-150
-100
-50
0Transfer Function (Channel)- Sea Water
24 Kbits/s17,415 bits/s5,847 bits/s2,585 bits/s1,405 bits/s
20 m
50 m
30 m40 m
10 m
UnderwaterPenetration
42
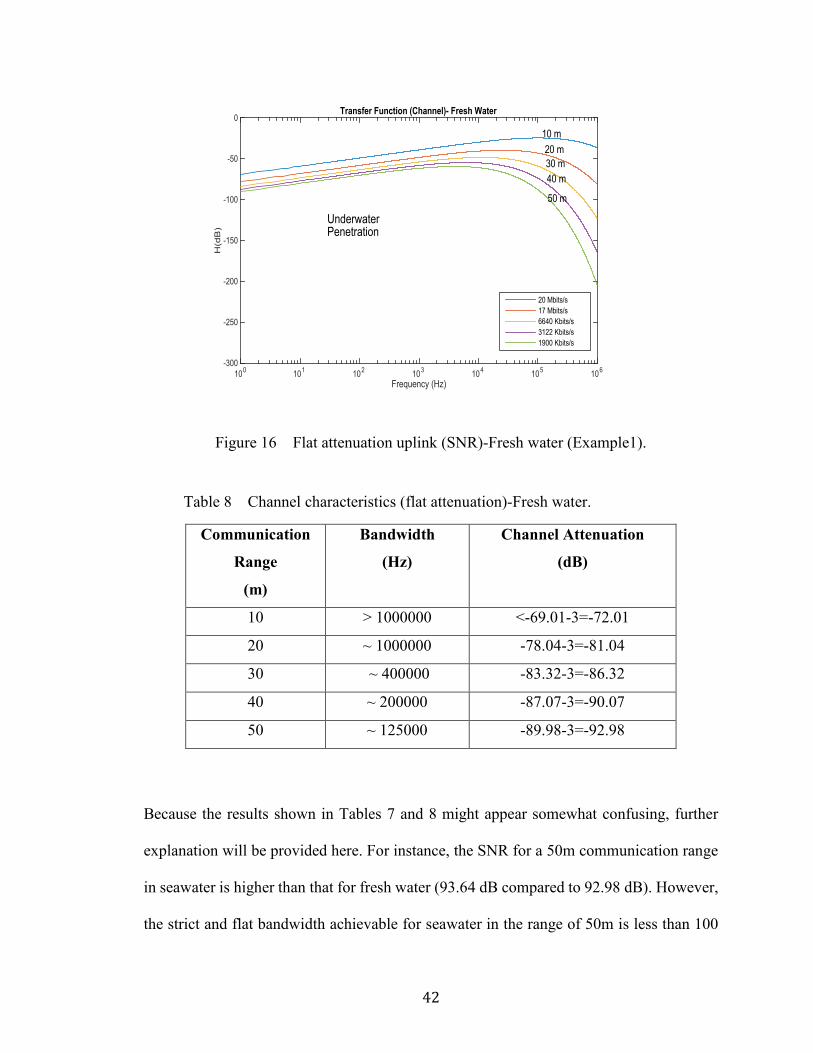
Figure 16 Flat attenuation uplink (SNR)-Fresh water (Example1).
Table 8 Channel characteristics (flat attenuation)-Fresh water.
Communication
Range
(m)
Bandwidth
(Hz)
Channel Attenuation
(dB)
10 > 1000000 <-69.01-3=-72.01
20 ~ 1000000 -78.04-3=-81.04
30 ~ 400000 -83.32-3=-86.32
40 ~ 200000 -87.07-3=-90.07
50 ~ 125000 -89.98-3=-92.98
Because the results shown in Tables 7 and 8 might appear somewhat confusing, further
explanation will be provided here. For instance, the SNR for a 50m communication range
in seawater is higher than that for fresh water (93.64 dB compared to 92.98 dB). However,
the strict and flat bandwidth achievable for seawater in the range of 50m is less than 100
Frequency (Hz)10
010
110
210
310
410
510
6
H(d
B)
-300
-250
-200
-150
-100
-50
0Transfer Function (Channel)- Fresh Water
20 Mbits/s
17 Mbits/s
6640 Kbits/s
3122 Kbits/s
1900 Kbits/s
10 m
20 m
30 m
40 m
UnderwaterPenetration
50 m

43
Hz, while this bandwidth exceeds 125 KHz in the case of fresh water. Thus, the quality of
communication differs significantly here.
For the downlink system case, the atmospheric noise experience attenuation as it
propagates down through the medium of either fresh water or seawater. The attenuation
model is the same as the signal attenuation model. Here again, the boat coil transmission
power is 0 dB for initialization. Channel loss (which consists a cubic distance attenuation
combined with an exponential absorption loss due to skin depth) is calculated by using
MATLAB (SkinDepth_Equ_88_V4.m) and the results are shown in Tables 9 and 10
Table 9 Flat attenuation downlink (SNR)-Seawater (Example1).
Communication
Range
(m)
S (dB)
= P_tx +
Channel
Attenuation
N (dB)
Attenuated
Atmospheric
Noise
SNR (dB)
10 <0-72.02 ~ -146 – 72.02 <146
20 0-81.12 ~ -146 – 81.12 ~146
30 0-86.53 < -148 – 86.53 >148
40 0-90.48 < -149 – 90.48 >149
50 0-93.64 < -151-93.64 >151

44
Figure 17 Flat attenuation downlink (SNR)-Seawater (Example1).
Table 10 Flat attenuation downlink (SNR)-Fresh water (Example1).
Frequency (Hz)10
010
110
210
3
H(d
B)
-300
-250
-200
-150
-100
-50
0Transfer Function (Channel)- Sea Water
48 Kbits/s
38,880 bits/s
13,916 bits/s
6,468 bits/s
3,650 bits/s
10 m
20 m
30 m
40 m50 m
Communication
Range
(m)
S (dB)
= P_tx +
Channel
Attenuation
N (dB)
Attenuated
Atmospheric
Noise
SNR (dB)
10
<0-72.01 ~ -134-72.01 < 134
20
0-81.04 ~ -134-81.04 134
30
0-86.32 ~ -136-86.32 136
40
0-90.07 ~- 137-90.07 137
50
0-92.98 ~ -138-92.98 138

45
Figure 18 Flat attenuation downlink (SNR)-fresh water (Example1).
In another example (see Figure 19), the communication will consider a submarine at a
depth of 50m, with divers submerged between the submarine and water surface. The
deployed submarine coil is very large and the diver’s coils are quite light and small. The
merit factor (here, based on p. 48 of the reference [2]) should be greater than 0.25 so that
we can ignore the thermal part of the noise and then Fa(f)(dB) = 294.15 − 36 log(f).
Thus, for having a merit factor of at least 0.25, we can choose antennas as detailed below:
The specifications of the submarine’s antenna are: r=10m, M= 16 Kg, √σρ⁄ = 50, which
can give us ∅s = 1000. Meanwhile, the specifications of the diver’s antenna are: r=0.1m,
M= 0.25 Kg, √σρ⁄ = 40, giving us ∅d = 1. So ∅ = ∅b × ∅d = 1000, which is greater than
0.25 and thus all assumptions and approximations are valid.
Frequency (Hz)10
010
110
210
310
410
510
6
H(d
B)
-300
-250
-200
-150
-100
-50
0Transfer Function (Channel)- Fresh Water
64.5 Mbits/s44 Mbits/s18 Mbits/s9 Mbits/s5,625 Kbits/s
10 m
20 m
30 m
40 m
50 m

46
Figure 19 Example 2 for uplink and downlink communication.
The communication range is maximum 50m, and since we are working in near-field and
T<<1 (T=0.2 in our MATLAB code), T =r
δ<< 1. During our previous simulations, we
assumed it as 0.2.
Uplink and Downlink SNR
Based on the topology of the situation, both submarine and diver coils are exposed to
attenuated atmospheric noise instead of its full value for both uplink and downlink
communications. The transmission power of the submarine and diver coils is 0 dB for
initialization, and the channel loss (which consists of cubic distance attenuation combined
with exponential absorption loss due to skin depth) is calculated using MATLAB
(SkinDepth_Equ_88_V4.m). The results are shown in Tables 12 and 13.
For uplink communication, the diver’s coil will receive the atmospheric noise from the
atmosphere, which is located above the coil. Thus, the signal travels distance “d” from the

47
submarine and the atmospheric noise travels from the water surface to the diver’s coil
“distance of 50-d”.
For downlink communications, the signal from the diver’s coil to the submarine’s coil
travels a distance d, while the atmospheric noise travels 50 𝑚 from the surface to the
submarine location.
Table 11 Flat attenuation uplink and downlink (SNR)-Seawater (Example2).
Communication
Range
(m)
S (dB)
P_tx +
Channel
Attenuation
N (dB)
Attenuated
Atmospheric
Noise
Uplink
SNR
(dB)
Uplink
N (dB)
Attenuated
Atmospheric
Noise
Downlink
SNR (dB)
Downlink
10 <0-72.02 ~ -146 -90.48 <164.48 ~ -146 -93.64 <167.62
20 0-81.12 ~ -146-86.53 ~151.41 ~ -146-93.64 ~158.52
30 0-86.53 < -148-81.12 >142.59 < -148-93.64 >155.11
40 0-90.48 < -149-72.02 >130.54 < -149-93.64 >152.16
50 0-93.64 < -151-93.64 >151 < -151-93.64 >151
48
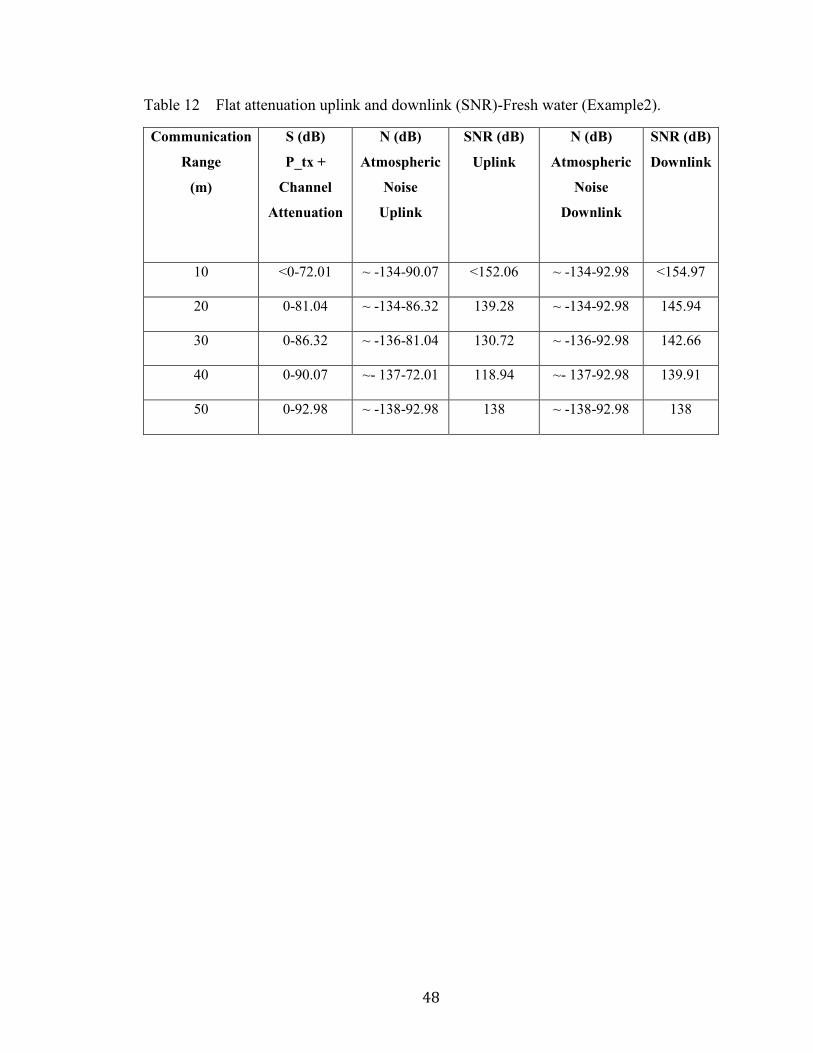
Table 12 Flat attenuation uplink and downlink (SNR)-Fresh water (Example2).
Communication
Range
(m)
S (dB)
P_tx +
Channel
Attenuation
N (dB)
Atmospheric
Noise
Uplink
SNR (dB)
Uplink
N (dB)
Atmospheric
Noise
Downlink
SNR (dB)
Downlink
10 <0-72.01 ~ -134-90.07 <152.06 ~ -134-92.98 <154.97
20 0-81.04 ~ -134-86.32 139.28 ~ -134-92.98 145.94
30 0-86.32 ~ -136-81.04 130.72 ~ -136-92.98 142.66
40 0-90.07 ~- 137-72.01 118.94 ~- 137-92.98 139.91
50 0-92.98 ~ -138-92.98 138 ~ -138-92.98 138

49
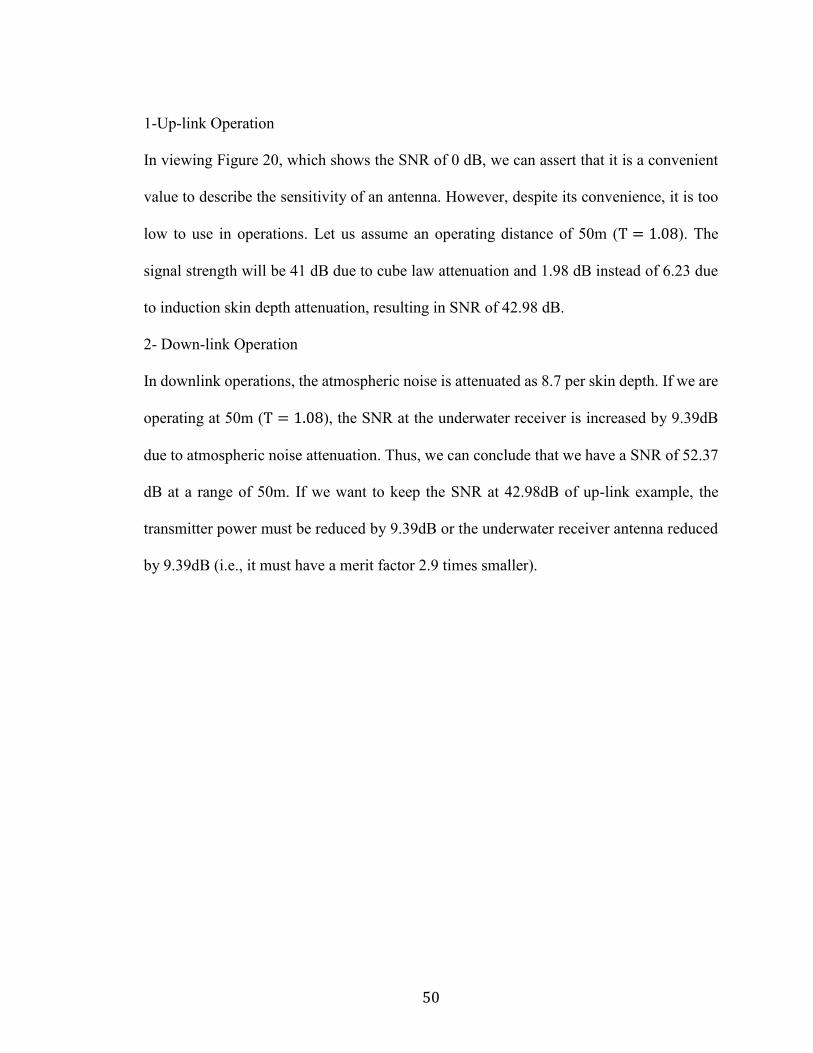
In the following example, the frequency has been assumed of 30Hz and a sea conductivity
of 4 S/m, resulting in a skin depth of 46m. The atmospheric noise temperature Fa =
241dB (Table 6) results in induced voltage at receiver antenna of 4nV. The Mass of the
transmitter antenna weighs 1Kg and has a diameter of 4m. Hence, the dissipating power of
1 w results in a magnetic moment of 100Am2 with a merit factor of ϕt = 100Am2/Ω.
Figure 20 SNR comparison for up-link and downlink operation.
50
1-Up-link Operation
In viewing Figure 20, which shows the SNR of 0 dB, we can assert that it is a convenient
value to describe the sensitivity of an antenna. However, despite its convenience, it is too
low to use in operations. Let us assume an operating distance of 50m (T = 1.08). The
signal strength will be 41 dB due to cube law attenuation and 1.98 dB instead of 6.23 due
to induction skin depth attenuation, resulting in SNR of 42.98 dB.
2- Down-link Operation
In downlink operations, the atmospheric noise is attenuated as 8.7 per skin depth. If we are
operating at 50m (T = 1.08), the SNR at the underwater receiver is increased by 9.39dB
due to atmospheric noise attenuation. Thus, we can conclude that we have a SNR of 52.37
dB at a range of 50m. If we want to keep the SNR at 42.98dB of up-link example, the
transmitter power must be reduced by 9.39dB or the underwater receiver antenna reduced
by 9.39dB (i.e., it must have a merit factor 2.9 times smaller).

51
CHAPTER5 CONCLUSION
This study examined the feasibility of improving communication under fresh and sea water
by way of a magneto-inductive (MI) communication method using a pair of coils as a
transmitter and receiver. In modeling the MI channel, both thermal and atmospheric noise
were studied and analyzed; however, under some certain circumstances and if the antenna’s
merit factor were greater than 0.25, the thermal noise could be ignored due to its
insignificance against atmospheric noise. The atmospheric noise by itself followed a
logarithmic equation that provided an approximate atmospheric noise-temperature ratio.
In terms of the communication field, the near-field region was the only one of interest in
the present dissertation. The near-field region covered all field points where the field
equations were described by quasi-static field formulas. It was also characterized by the
ratio of distance to skin depth, which had to be considerably less than 1. For the current
research and during the all MATLAB simulations, it was set to 0.2.
A cubic distance attenuation integrated with an exponential absorption loss was the channel
model used for the entire investigation. Its low pass characteristic was verified by
MATLAB simulations for both fresh and sea water, showing 0.01 and 4 S/m conductivities.
Thus, compared to sea water channel simulation results, fresh water offered a significantly
higher bandwidth communication channel. Consequently, better capacity was achievable
with the same transmission power. This indicates that the channel attenuation for sea water
was notably greater than the signal attenuation over a fresh water communication channel.

52
For example, to attain a distance of 100m, the channel bandwidth for fresh water was 25
KHz with an attenuation of -102.1 dB, whereas for sea water, these figures were degraded
to 10 Hz and -104.5 dB, respectively.
In terms of channel capacity, a better one is attainable for fresh water communication.
Thus, for communicating over a distance of 100m, a capacity of roughly 315.51 Kbps was
achievable for fresh water communication, whereas exchanging less than 200 bps was
possible for a sea water MI communication scheme.
In addition to channel transfer function modeling and its dependency on water
conductivity, transmission SNR proved to be another main factor for achieving a certain
range of effective communication, bandwidth, and channel capacity. However, it is worth
noting that a higher SNR can achieve longer communication distances with better
bandwidth and channel capacity. Moreover, the received SNR might be different at each
side of the MI communication. In other words, when the receiver antenna is at the water
surface, it is exposed to a broad range of atmospheric noise. The atmospheric noise then
experiences the channel attenuation for the receiving antenna that is under water. Thus, the
receiving antenna on the surface collects an attenuated transmitted signal as well as all the
atmospheric noise.
However, the SNR for the receiver antenna immersed in water is different, as it detects the
attenuated transmitted signal and atmospheric noise coming from the surface downward
towards the antenna cross-section. In the latter case, the received noise power is smaller
than the former situation, and if communication parties radiate the same transmission

53
power, its SNR will be higher. The mentioned situation has been demonstrated here by
detailed examples and has also been supported by MATLAB simulations.
Future work will focus on the optimization of the proposed and existing systems. Firstly,
Gibson showed that an optimal range does exist and that it features minimum channel
attenuation between transmitter and receiver. He also derived the T for triaxial and co-
planer coils, which is 2.83 and 3.85, respectively, and recommended using those T values
as alternative conditions for near-field MI schemes to achieve better results. Secondly,
during the course of existing research, the permittivity is assumed to be constant, whereas
the reality is that it is variable as well as frequency-, temperature-, and salinity-dependent.
Thus, trying to figure out its dependency and introduce the existing model with derived
results might give better results in future investigations. Thirdly, different antenna patterns
could be modelled and introduced to existing simulations so that the effects of different
shapes and designs could be studied in greater detail. Finally, The MI noise analysis and
measurements roughly match up, which means that theoretical equations can be used for
noise calculations. However, to obtain more accurate results, pre-amplifier noise could be
measured with newer and more precise techniques and then added to noise analysis
methods.

54
BIBLIOGRAPHY
[1] B. Gulbahar and O. B. Akan. A communication theoretical modeling and analysis of
underwater magneto-inductive wireless channels. IEEE Transactions on Wireless
Communications 11(9), pp. 3326-3334. 2012. . DOI:
10.1109/TWC.2012.070912.111943.
[2] C. Schlegel, M. Mallay and C. Touesnard. Atmospheric magnetic noise measurements
in urban areas. IEEE Magnetics Letters 5pp. 1-4. 2014. . DOI:
10.1109/LMAG.2014.2330337.
[3] A. D. W. Gibson, "Channel Characterisation and System Design for Sub Surface
Communications ." , University of Leeds, 2003.
[4] J. I. Agbinya. Principles of Inductive Near Field Communications for Internet of
Things, River Publishers, Denmark, 2011, ISBN: 978-87-92329-52-3.
[5] J. I. Agbinya and M. Masihpour. Near field magnetic induction communication link
budget: Agbinya-masihpour model. Presented at 2010 Fifth International Conference on
Broadband and Biomedical Communications. 2010, . DOI:
10.1109/IB2COM.2010.5723604.
[6] J. J. Sojdehei, P. N. Wrathall and D. F. Dinn. Magneto-inductive (MI)
communications. Presented at MTS/IEEE Oceans 2001. an Ocean Odyssey. Conference
Proceedings (IEEE Cat. no.01CH37295). 2001, . DOI: 10.1109/OCEANS.2001.968775.
[7] L. Erdogan and J. F. Bousquet. Dynamic bandwidth extension of coil for underwater
magneto-inductive communication. Presented at 2014 IEEE Antennas and Propagation
Society International Symposium (APSURSI). 2014, . DOI: 10.1109/APS.2014.6905114.
[8] M. C. Domingo. Magnetic induction for underwater wireless communication
networks. IEEE Transactions on Antennas and Propagation 60(6), pp. 2929-2939. 2012.
. DOI: 10.1109/TAP.2012.2194670.
[9] S. C. Lin et al. Distributed cross-layer protocol design for magnetic induction
communication in wireless underground sensor networks. IEEE Transactions on Wireless
Communications 14(7), pp. 4006-4019. 2015. . DOI: 10.1109/TWC.2015.2415812.
[10] S. Kisseleff, I. F. Akyildiz and W. H. Gerstacker. Throughput of the magnetic
induction based wireless underground sensor networks: Key optimization techniques.
IEEE Transactions on Communications 62(12), pp. 4426-4439. 2014. . DOI:
10.1109/TCOMM.2014.2367030.

55
[11] Seongwon Han et al. Evaluation of underwater optical-acoustic hybrid network.
China Communications 11(5), pp. 49-59. 2014. . DOI: 10.1109/CC.2014.6880460.
[12] T. E. Abrudan et al. Impact of rocks and minerals on underground magneto-
inductive communication and localization. IEEE Access 4pp. 3999-4010. 2016. . DOI:
10.1109/ACCESS.2016.2597641.
[13] X. Tan, Z. Sun and I. F. Akyildiz. Wireless underground sensor networks: MI-based
communication systems for underground applications. IEEE Antennas and Propagation
Magazine 57(4), pp. 74-87. 2015. . DOI: 10.1109/MAP.2015.2453917.
[14] Z. Sun and I. F. Akyildiz. Magnetic induction communications for wireless
underground sensor networks. IEEE Transactions on Antennas and Propagation 58(7),
pp. 2426-2435. 2010. . DOI: 10.1109/TAP.2010.2048858.
Related Documents