INFORMATION SCIENCES 9, 151-168 (1975) 151 Uncorrelated Minimum-Length Sequence and Its Application to Parameter Estimation SHOJI TOMINAGA, SHINICHI TAMURA and KOKICHI TANAKA Department of Information and Computer Sciences, Faculty of Engineering Science, Toyonaka, Osaka University, Osaka, Japan 560 and SEIHAKU HIGUCHI Faculty of Industrial Arts, Kvoto Technical University, Kyoto, Japan 606 ABSTRACT This paper deals with a realization of an input sequence for estimating the response function of a discrete linear system with noisy observations. It is shown that the input sequence can be given by the repetition of the uncorrelated minimum-length sequences whose amplitude takes the maximum values under a given amplitude-constraint. The reali- zation of the sequences is treated as a block design problem in combinatorial analysis. As a result, the sequences are characterized by an extended form of block design. Thus the input sequences may be obtained and are denoted the UM (uncorrelated minimum-length) sequences for abbreviation. I. INTRODUCTION The importance of input selection for system identification has been recog- nized for a long time. A large amount of literatures exists on pseudo-random input sequences, which have been found to provide improved identification for a large number of systems. Some of the pertinent representative references are, for instance, [l-4] . In practice, we are not free to choose arbitrarily large in- puts to overcome the observation noise, thereby to enhance accuracy. Instead, it is reasonable to constrain the input signals (e.g., in amplitude or energy). Re- cently the problem of optimally designing input signals for identification of systems has been considered by a number of authors, [5 - 121. Arimoto and Kimura [ 111 used an information-theoretic approach to the case of amplitude- constraint and showed that, in the case of identifying the response functions, a pseudo-random binary input sequence with as small a correlation as possible, for example, a maximum-length binary sequence, is effective in the sense that it maximizes a quantity of information obtained by the measurement. However, it should be noted that a long period pseudo-random binary sequence is required to make correlation as small as possible. @American Elsevier Publishing Company, Inc. 1975

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

INFORMATION SCIENCES 9, 151-168 (1975) 151
Uncorrelated Minimum-Length Sequence and Its Application to Parameter Estimation
SHOJI TOMINAGA, SHINICHI TAMURA and KOKICHI TANAKA
Department of Information and Computer Sciences, Faculty of Engineering Science, Toyonaka, Osaka University, Osaka, Japan 560
and
SEIHAKU HIGUCHI Faculty of Industrial Arts, Kvoto Technical University, Kyoto, Japan 606
ABSTRACT
This paper deals with a realization of an input sequence for estimating the response function of a discrete linear system with noisy observations. It is shown that the input sequence can be given by the repetition of the uncorrelated minimum-length sequences whose amplitude takes the maximum values under a given amplitude-constraint. The reali- zation of the sequences is treated as a block design problem in combinatorial analysis. As a result, the sequences are characterized by an extended form of block design. Thus the input sequences may be obtained and are denoted the UM (uncorrelated minimum-length) sequences for abbreviation.
I. INTRODUCTION
The importance of input selection for system identification has been recog-
nized for a long time. A large amount of literatures exists on pseudo-random
input sequences, which have been found to provide improved identification for
a large number of systems. Some of the pertinent representative references are, for instance, [l-4] . In practice, we are not free to choose arbitrarily large in-
puts to overcome the observation noise, thereby to enhance accuracy. Instead,
it is reasonable to constrain the input signals (e.g., in amplitude or energy). Re- cently the problem of optimally designing input signals for identification of
systems has been considered by a number of authors, [5 - 121. Arimoto and Kimura [ 111 used an information-theoretic approach to the case of amplitude- constraint and showed that, in the case of identifying the response functions, a pseudo-random binary input sequence with as small a correlation as possible, for example, a maximum-length binary sequence, is effective in the sense that it maximizes a quantity of information obtained by the measurement. However, it should be noted that a long period pseudo-random binary sequence is required to make correlation as small as possible.
@American Elsevier Publishing Company, Inc. 1975
152 S. TOMINAGA, et al.
In this paper, the system considered is a scalar input and scalar output dis- crete linear system with additive noise on the observations. The amplitude of the input signal is restricted from the physical realizability. From a practical point of view, it is desired and is also effective that the.parameters of the system are obtained with accuracy in a short time. If we have an uncorrelated minimum- length sequence (UM sequence), it is possible to estimate an impulse response by using its sequence repeatedly. Therefore, it is expected that, because the input test signal is made up of the repetition of the minimum-length binary sequence, the identification procedure becomes easy in practical use.
Various approaches, although many efforts are required, may be developed for the realization of the sequences that satisfy the given conditions. Recently error correcting codes are related with (v, k, h) block design in combinatorial analysis (e.g., [ 131 [ 147 ), which is useful to various designs of an experimental planning method. Speci~cally, Hsu [ 141 investigated m~imum-length sequences and their relation with an incomplete block design. The realization of UM se- quences proposed in this paper is devised from the point of view of uncorrelated minimum-length, and is replaced with a design problem. After some suitable modifications an extended form of block design is derived and is demoted (v, k, X, p) design.
In Sec. 11, the problem is stated and UM sequence is defined. The realization of the sequences is contained in Sec. III. The existence of (v, k, X, y) design for various parameters is examined by a digital computer, and some representative sequences are shown in the table. Sec. IV presents some illustrative examples, and the goodness of the estimates in comparison with other sequences is recog- nized.
II. ANALYSIS OF INPUT SIGNAL
Consider a scalar-input and scalar-output discrete linear constant system whose input-output relation is described as
Yf = j, hixt-i+l + vr (t=n,n+l,. . .)
where { x8 } is a sequence of input test signal to be determined, yr is an output which can be observed, vr is noise which may include measurement error and approximation error, and ( hi } is an unknown ~nitel~approx~ated sequence of the impulse response.
For the sake of simplicity of the notations, let
yt = xt h + vt
UNCORRELATEDMINIMUM-LENGTHSEQUENCE 153
where
y*= i&Y,+t -Y,+,_JT
h = [h, hz - * +JT
vt= I”8 “n+l -.~t+ll_I]T
xt= [x t+n-l ‘t+n-2’ ’ .“*lT
x,=
xn x n-1 .... x1
XI n +1 3 ‘. * ’ x=
‘t+n-1 ‘*+n-2’ * ’ Xf
ZZ
. T
Xl
T x2
‘T xt
(3)
%,I = 0, (4)
E[vr v;] = R.
The superscript T means its transpose. We assume on the amphtude of the input signals and the properties of the noise that
One can associate the quadratic performance
J $1 = [y, - x, h] T A“ [y, - x, i] (5)
with the system of (2) where A is t X c symmetric and positive definite matrix. The unbiased estimator h that minimizes the above performance criterion can be expressed as
i = [XT A-’ XJ -’ x, A-’ y, .
Moreover it is well known [ 151 that if A = R, its estimator h is an unbiased mini- mum variance estimator among the various linear unbiased estimators. Then the least square estimator, its covariance matrix and its variance are represented, respectively, by

154 S. TOM~NA~A, et al.
h= [XT R-” XJ-r X: y,, (6)
P, n E [(h - i) (h -@j = [XT R-r XJ -l, (7)
‘vlt GE [(h - h)* (h - h)] = tr [ [Xr R-’ Xt] -‘I, (8)
where tr A denotes the trace of A. The input sequence minimizing the estimation error should be required. In
other words the input of minimizing Yf is optimal. Here we assume white noise with
R= c2 I,,
where I, is the t X t identity matrix. Then under the constraint (4) the variance V; is bounded by
Vt = tr [u2 [XT Xr] -l]
2 no2 5 Xi+n_12 i x
i
L!- 2 -=- ix2 n
i=l i=l i+n-2 j=l 1 ) >!!d, = ta2
where XT X, is positive definite and has the following form:
x;xt=
t ’ “2i+,l-l
i=l I+i xj+n_1 Xi+n_2 *. .
i=l f: Xixi+n
i= 1
li Xf+n-l Xf+ny2 ii ‘i+n-E2 i=l i=l
f: Xixi+n_l . . . . . . . . . . . - -. . . . .
i= 1 f: x.2
i=l ’
(9)
L
!-I
! -00)
As a matter of fact, there exists no sequence such that (9) is expressed by the equal sign for any t 2 n.
If the sequenbe x’ = (Xr X2 . . . - xv) is used repeatedly such that
f?J =a, (i= I;-.,Y), (11)
UNCORRELATEDMINIMUM-LENGTHSEQUENCE 155
; xixi+i =O, 0’ = 1, * ’ . ) n- l), i=l
(12)
wherexi,” =Fi(i= l;*-,u)andv = > n, then the minimum variance is attained whenever t is an integral multiple of V.
Consider the case of arbitrary t. Let c = m v + 1, for 1< v. We define
Then using xf XV = v a2 I, X, and X: X, are rewritten as
x;xr =
x, =
ta*
::
32 .
xn
l-l l-1 C xn+j ‘~+j_l ... is0 x -
i-0 n +ixi+
l-1 E xn+i_l xn+i ta*
i=O
(13)
04)

156 S. TOMINAGA, et al.
Except for the diagonal elements, the (i, j) elements of XT X, are bounded by v a2 12 as follows:
where 0 < 15 v/2, or
(17)
where v/2 5 I< v.
Obviously if t >> v, then the value of the diagonal elements of XT X, become sufficiently large in comparison with the off-diagonal elements so that [X:X,] -’ M (llta2) I.
Thus, the variance is represented by
vt = n t a2
(t = m Y), (18)
lim r Vt = 9 (tfmv). t+-
Note that from (16) and (17), the smaller Y makes the estimation errors decrease and makes the variance converge faster to the ideal curve (see (18)).
Under these considerations, we may call the sequence x* UM sequence, which satisfies the following three conditions simultaneously.
(1) The sequence is binary (see (1 I)). (2) The autocorrelation function is always zero for i shifts, where i = I, . 1 . y
n-l (see (12)). (3) The period v is the shortest for v 2 n.
In the practical measurements, we estimate the parameters of the system using the above sequence repeatedly as the input sequence.
III. REALIZATION OF INPUT SEQUENCES
In this section, we obtain the realization of the UM sequence defined in the preceding section. Let a = I for the simplicity of discussion. If the sequence
UNCORRELATEDMINIMUM-LENGTHSEQUENCE 157
shifted i times in one direction is uncorrelated with the original one, the same
is true for the sequence shifted the same times in the other direction. It is con-
venient to introduce the following notation concerning this property:
x* 1 x*ai 0 x* -ui
1 x*, (19)
where 1 denotes the orthogonality, and the superscript ai means the i shifts.
We define the following sets and the numbers of elements contained in those:
V _n {0,1,2;*.,v-1) (20)
B. h { ilFi = -1} (21)
B, a { i+Z(modv)IiEBe} (22)
#{Be} =k (23)
# {Bo nB,} =A, (24)
wherei= l;**,k,l= l;.. , v -1, and i t I (mod V) represents the modulo v
sum of i t I and # denotes the number of elements.
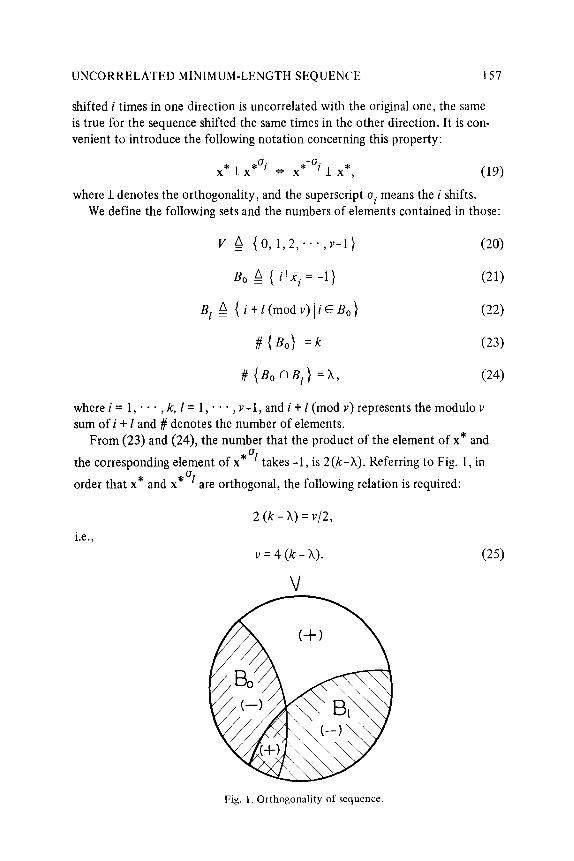
From (23) and (24), the number that the product of the element of x* and
the corresponding element of x* *’ takes -1, is 2(k-A). Referring to Fig. 1, in
order that x* and x*” are orthogonal, the following relation is required:
2 (k - h) = v/2,
i.e.,
v = 4 (k - h). (25)
Fig. 1. Orthogonality of sequence.

158 S. TOMINAGA, et al.
Conversely, it is obvious that (25) is sufficient for the orthogonality of x* and
X *OI and x* ‘I. Thus, we obtain the following theorem for the period of the
sequence.
THEOREM 1. It is necessary that the period v of the uncorrelated binary sequence for some time shifts is a multiple of 4.
A. THECASEOF~~Ix~aili=I,...,v-l).
In this case, the period is the shortest for a futed n from the properties of the UM sequences. Then (24) should hold for any 1 (I = 1, * * . , v-l). We can rewrite (2 1) and (22) as
Bo = { bl, 62,. . * , b, > ,
BI={b~+l,b~+I;~~,bk+I}(modv)
= {b;,b;;..,b;} .
(26)
(27)
Here, B, is composed of the elements that the elements of B. are permuted I times in a cycle of v. From (24), there are exactly X pairs (bi, bk) with bi = bk (i,m= I;*., k). Note that b,. exists in B. such that bh E bi + I (mod v). Then (24) is rewritten as
# { (bi, bi) 1 bi - bj z 1 (mod v) } = A (i, j = 1, . * * , k). (24)
Thus, for any 1 f 0 (mod v) x* and x*c’ are orthogonal if and only if (25) and the following equation hold for any 1 f 0 (mod v) E V:
#{BonBI}=#{(bi,bj)lbi-bj~I(modv)}=X,
where X is constant for any 1. From (28), we have
(28)
# { (bi, bj) ) = 1vgA # { (bi, bj) 1 bi - bj E I (mod v) } . (29)
Obviously the left-hand side of the above equation is k’, and the right-hand side is written as
k ’ 2: # { (bi, bj> 1 bi - bj E I (mod V) 1 = k t h (V - I),

UNCQRR~LAT~DMINIMUM-L~NGTIIS~QUENC~~ 159
i.e.,
k2 =k+A(v- 1). (30)
Since the same discussion may hold even if k is the number of +1 in the sequence. we can assume
~lirninatin~ v from (25) and f30), and solving for k. we have
Putting 0 = (4X + 1) I’*, it is easily seen that fl is odd and
(32)
From (25),(30) and (33), the parameters v, k and h are represented by u as follows:
v=4u2. k=Zu=-u, h=u’-u. (34)
Here, we represent the nrthogonality of the above sequence in a matrix form. We call the elements of V the objects and the subsets of V, BO.. . . ,By_, the blocks. Let the incidence matrix A = [ aij ) be as follows:
A
i
-I, ifiEBj
“ij = (l,j=O ,.... v- I),
I, if i $C Rj (35)
where
% R, I.. . . . . PI”_,
0 “00 “01 . . . “(NV- I)
A= I “IO “11 f.. “I(“_1) (30)
v-1 “(v-L)1 “(“-I)2 *** a(v-l)(v-l

160 S. TOMINAGA, et al.
Then A is a cyclic matrix from (27) and each column contains k pieces of -1. We associate objects i, i=O, . * - , j=O,...,
v -1, with the rows and associate blocks Bj, v -1, with the columns. But the arrangement of A is unchanged even
if objects and blocks are exchanged. Such arrangement of A is called a cyclic (v, k, X) block design. In other words, a cyclic (v, k, h) block design is an arrangement of v distinct objects into v blocks such that each block contains exactly k distinct objects and every pair of distinct objects (i, j) occurs exactly together in X blocks, and conversely that each object occur exactly in k dis- tinct blocks and every pair of distinct objects (Bi, Bj) contains exactly together h objects, where Bi is represented as (22) (see [16]).
Conversely if the matrix A is settled, we can easily obtain Bi as (22). Note that A is a cyclic Hadamard matrix and any column or row is the sequence x*. Thus, the following theorem is concluded.
THEOREM 2. The sequence x* with x* 1 x* Oi (i = 1,. . . , v-l ) exists if and only if the following cyclic (v, k, A) block design exists:
v = 4u2, k = 2u2 -u, h=u2-U,
where u is a positive integer.
If u = 1, we can easily find the cyclic (4, 1,O) block design, where x* = (-1 1 1 1). But for u 5 100, the non-existence of this design has been con- firmed except for u = 39,60,78,93 (see [ 171). Thus, we may consider that in practical use, the sequences for identification do not exist in this case except for v = 4.
B. THEcAsEoFx*~~*oi(i=1,~~~,(vf2)-1,(v/21+I,...,v-I)
Here, let v = 4u from Theorem 2. Using (19) and the relation of x* = x*04’, ifforanyjs 2u- 1
(37)
we have
x*lx*ui(i=l,...,j,4u-j,..., 4u-1). (38)
Now we consider the case of the sequence uncorrelated for any shift excepting the shifts of half-period, i.e.,
x*lx*ui(i=l,~*~,2u-1,2u+l,**~,4u-1). (39)
Then excepting # {B,, f~ B,, } f A, the other conditions are the same as in A.

UNCORRELATEDMINIMUM-LENGTHSEQUENCE 161
THEOREM 3. The sequence x* with x* 1 x*oi (i = 1, . . . ) 2u-1,2u+l,. . . ) 4u -1) exists if and only if the following cyclic (v, k, X, u) design exists’ :
v=4u, k=2u- 1 -m, X=u- l-m, u=m2 +m,
where u and m are positive integers and (m + 1)' < 2~.
Proof We assume that the blocks Bc and B2a contain together P objects, i.e.,
# { (bi, bi) 1 b, - bi = 2u (mod V) } = P. (40)
In the same manner as in A, we have
# ( (bi, bj) ) = 2: # { (bi, bj) 1 b, - bj = 1 (mod V) } , (41)
and the right-hand side is written as
# { (bi, bj) 1 bi - bj = 0 (mod v)}
t#{(bi,bi)Ibj-bjr2u(modv)}+h(4u-2)
= k+u+h(4u-2).
Using (41) and (25) and solving for k, we have
k = + [(4u - 1) - (4,~ + l)“] . (42)
Putting (4~ t 1)” = 2m + 1, where m is a positive integer, the parameters V, k, h and /.t can easily be obtained as in the above theorem. Conversely, if the design
with such parameters exists, the orthogonality of the sequence is obvious from
(21) (22), (24) and (25). Q.E.D.
It should be noted that if putting /._t = h , (v, k, h, u) design obtained coincides
with (v, k, A) block design in Theorem 2. Moreover we obtain the following theorem for the incidence matrix A
THEOREM 4. The incidence matrix A of (v, k, h, u) design obtained in Theorem 3 has the determinant
IAl = [16(mt 1)2(2u-(m+1)2)]U. (43)
‘Obviously since this problem is not exactly corresponding to the problem of a cyclic
(v, k, h) block design, we call the former a cyclic (v. k, h, ,u) design.

162 S. TOMINAGA, et al.
Proofi The matrix ATA is expressed by the following form;
4u
where a = v - 4 (k - II). We define
AI 4 ~12~’ A2 &I,,, -
where I,, is the 2~ X 2u identity matrix. Then it is easily shown that
IATAI = A’ A2 =[A11 IAl-A2A;‘A2[. (49 -A2 At
Moreover we have
Now we consider the case of (v, k, h, 0) design. The parameters are given, respectively, by
v=4u, k=2u-1, A=u-I, p=o. (46)
Then Fig. 2 shows the location of xx in this case, where a cycle is divided into 4u equal parts, moreover one pair of points facing each other in Fig. 2 is marked by the same sign and the other pairs are marked by signs different from each other. This fact provides the effective search procedure for UIvl sequence. The existence of the (v, k, h, p) design is examined by a digital computer and listed in Table 1. Nonexistence of the (v, k, A, 0) design for v = 32,44 is shown in the table. Since the cases of p f 0 are not investigated, there remains the possi- bility of existence.

163
Fig. 2. Location of x* in (v, k, A, 0) design.
(0 : +I,*: -1).
Example. The cyclic (8,3, 1,O) design is represented by the matrix A as follows:
A=
Bo BI B2 B3 B4 BS Be &
0 1 1 1 1 -I 1 -1 -r
1 -1 1 I 1 1 -1 1 -1
2 -I -1 1 1 1 1 -1 1
3 1 -1 -1 1 1 1 1 -1
4 -1 1 -1 -I I 1 I 1
5 1 -1 1 -1 -1 1 1 1
6 1 1 -1 1 “I -1 1 1
7 I 1 1 -1 1 -1 -1 1
I
7
J
B. = (1,2,4}
B, = (2,3,5)
Bz = (3,4,6)
7 B3 = {4,5,7} .
B4 = (W,O)
Bs = (67,X }
BA = {7,0,2)
B, = {RI, 3)
The matrix A is the 8 X 8 cyclic matrix and every column contains 3 pieces of -1. Both the ith column and thejth column have -1, only in one row, but for i zj + 4 (mod 8) where the columns do not have together one. We can see that any two columns are orthogonal to each other, except for the pairs of ith column and (i t 4) (mod 8)th column. Obviously the same statement is true for ex- changing the columns and the rows. Thus, any column or row is the sequence ., *

164
TABLE I
S. TOMINAGA, et al.
Existence of (v, k. h, p) Design
(4, I,& 0) (8, 3, I,@ (12, 5, 290) (l&4, 1, 2) (1’5, 7,320) *(16, 6, 2, 2) (20,9,4,0) *(20, 8, 3, 2) (24, 11,5,0) *(24, 10,4, 2) (28, 13,690) (28, 12.5, 2)
*(32, 15, 7,0) (36, 17,8,0) (40, 19,9,0)
*(44, 21, 10,O) (48, 23, 11,O) (52, 25, 12.0)
*GO, 7, 2, 6) *(24, 9, 3.6) *(28, 11.4, 6)
* Nonexistence.
From the definition, UM sequences are the sequences x* with the shortest
period for a fixed n. We can easily see that, except for II = 4, the sequences
with v = 4s in B have the shortest period if n = 2s or n = 2s - 1, where s is a
positive integer. Thus, the UM sequences are settled according to the number of unknown parameters as follow:
(1) The UM sequence with v = 4, if n = 2,3,4.
(2) The UM sequence with v = 4s, if )I = 2s-1,2s, where s 2 3, except
for v = 32,44.
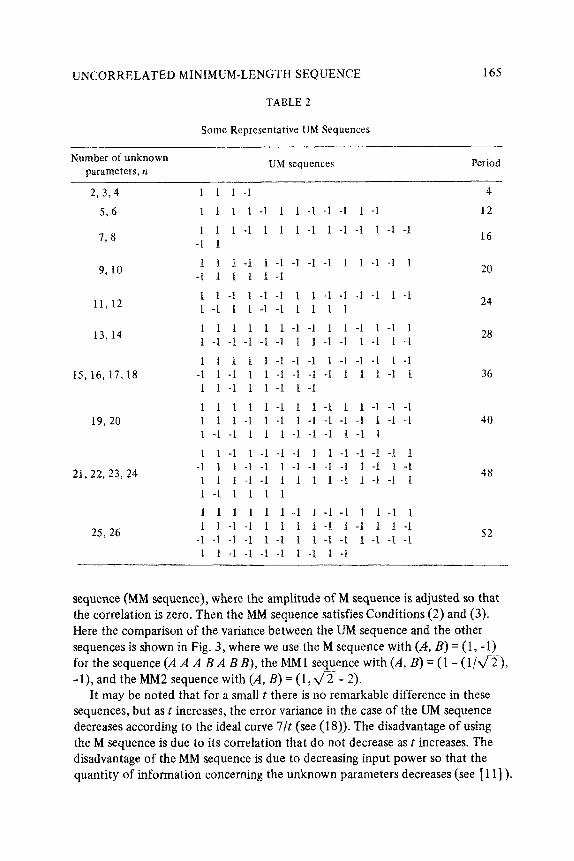
For the case of a small n, the UM sequences are shown in Table 2, where the sequences with v = 4s are some representative sequences of the (v, k, h, 0) de-
sign,
IV. NUMERICAL EXAMPLES
It is appropriate to present some examples for illustrating the effectiveness of the UM sequences. A maximum-length binary sequence (M sequence) is well known as a pseudo-random binary sequence, where the period v is 3, 7, 15, 3 1, . . . , for v 2 n. For example, for 5 5 n 5 7, the M sequence with v = 7 has the shorter period than the UM sequence.
In the special case of n = 7, the period of the UM sequence is nearly twice of the period of the M sequence. Then the M sequence satisfies conditions (1) and (3) in the preceding section. Moreover there is a modified maximum-length
U~~ORRELATED MINIMUM-LUNATIC SEQUENCE 16.5
TABLE 2
Some Representative UM Sequences
Number of unknown parameters, n
UM sequences Period
2,374
5,6
7, 8
9,10
11,12
13,14
15,16,17,l8
19,20
21,22,23,24
25,26
1 1 l-l
1 1 1 1 -1 1 1 -1 -1 -1 1 -1
1 1 1 -1 1 1 1 -1 1 -1 -1 1 -1 -1 -1 1
1 1 1 -1 1 -1 -1 -1 -I 1 1 -1 -1 1 -1 I 1 1 I -I
1 1 -1 1 -1 -1 1 1 -1 -1 -1 -1 1 -I l-l 1 l-1 -1 1 1 1 1
1 1 1 1 1 l-1 -1 1 l-1 l-l 1 1 -1 -1 -1 -1 -1 1 1 -1 -1 1 -1 1 -1
I 1 1 1 -1 -1 I -1 1 -I -1 -1 1 -1 -1 I -1 1 -1 -1 1 -I -1 1 I 1 -1 1 1 I -1 I 1 -1 1 -1
1 1 1 1 1 -1 1 1 -1 1 1 -1 -1 -1 1 1 1 -1 1 -1 1 -1 -1 -1 -1 1 -1 -1 1 -1 -1 1 1 1 -1 -1 -1 1 -1 1
1 1 -I 1 -1 -1 -I 1 1 -1 -1 -1 -1 1 -1 1 t -1 -1 1 -1 -1 -1 -1 1 -1 1 -I 1 1 1 -1 -1 1 1 1 1 -1 1 -1 -1 1 l-l 11 11
1 1 1 1 1 l-l l-1 -1 1 l-l 1 1 1 -1 -1 1 1 1 1 -1 1 -1 1 1 -1
-1 -1 -1 -1 I -1 1 1 -1 -t 1 -1 -1 -1 1 I -1 -1 -I I -1 -1 1 -1
4
12
16
20
24
28
36
40
48
52
sequence (MM sequence), where the amplitude of M sequence is adjusted so that the correlation is zero. Then the MM sequence satisfies Conditions (2) and (3).
Here the comparison of the variance between the UM sequence and the other
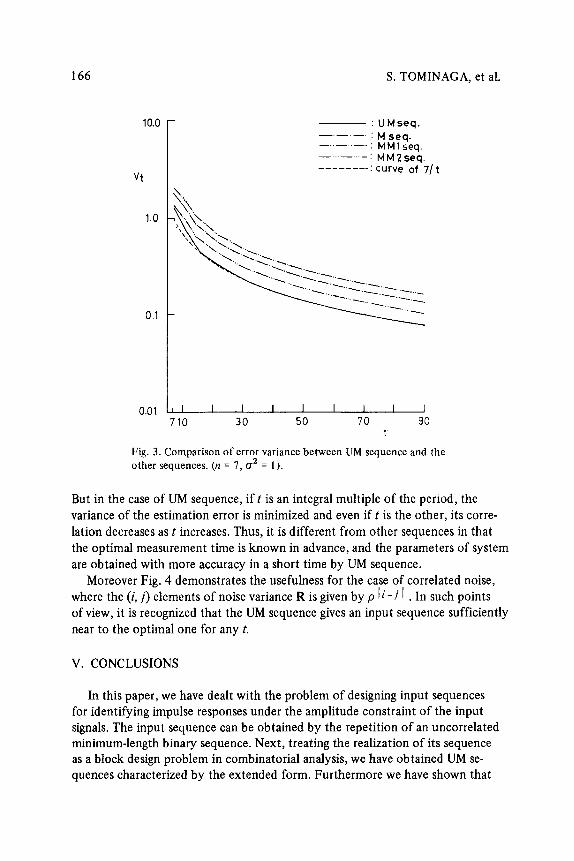
sequences is shown in Fig. 3, where we use the M sequence with (A, B) = (I, -1) for the sequence (4 A A B A B B), the MM 1 sequence with (A, B) = (1 - (I/d?), -l), and the MM2 sequence with (A, B) = (I,<2 - 2).
It may be noted that for a small t there is no remarkable difference in these sequences, but as c increases, the error variance in the case of the UM sequence decreases according to the ideal curve 7fb (see (18)). The disadvantage of using
the M sequence is due to its correlation that do not decrease as t increases. The disadvantage of the MM sequence is due to decreasing input power so that the quantity of information concerning the unknown parameters decreases (see [ 1 l] ).
166 S. TOMINAGA, et aL
~ : UMseq. -.-.-’ 1 M seq. -..-..-. : MM1 seq. - ..-...- : MM * seq. --------: curve of 71 t
0.01 1 710 30 50 70 90
t
Pig. 3. Comparison of error variance between UM sequence and the
other sequences. (n = 7, a2 = 1).
But in the case of UM sequence, if t is an integral multiple of the period, the
variance of the estimation error is minimized and even if t is the other, its corre-
lation decreases as t increases. Thus, it is different from other sequences in that
the optimal measurement time is known in advance, and the parameters of system
are obtained with more accuracy in a short time by UM sequence.
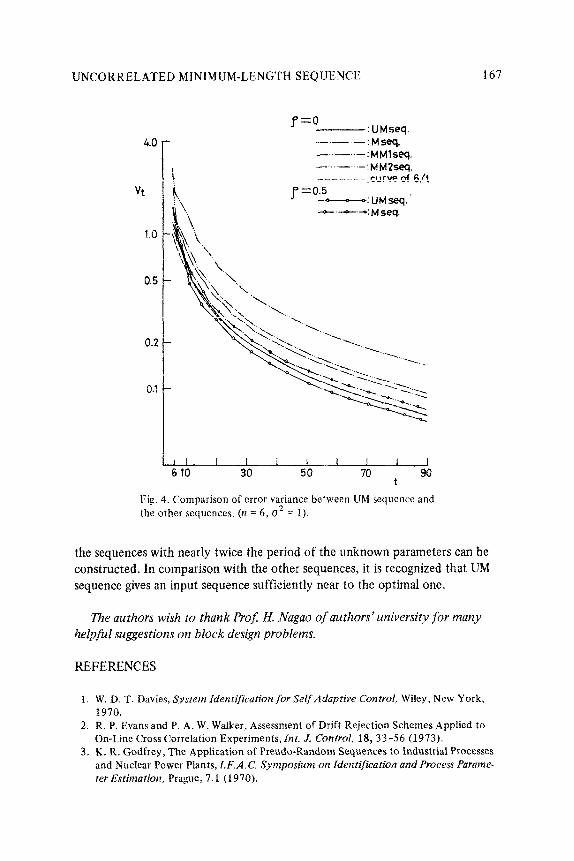
Moreover Fig. 4 demonstrates the usefulness for the case of correlated noise,
where the (i, j) elements of noise variance R is given by p Ii-i 1 . In such points of view, it is recognized that the UM sequence gives an input sequence sufficiently
near to the optimal one for any t.
V. CONCLUSIONS
In this paper, we have dealt with the problem of designing input sequences for identifying impulse responses under the amplitude constraint of the input signals. The input sequence can be obtained by the repetition of an uncorrelated minimum-length binary sequence. Next, treating the realization of its sequence as a block design problem in combinatorial analysis, we have obtained UM se- quences characterized by the extended form. Furthermore we have shown that
UNCORRELATED MINIMUM-LENGTH SEQUENCE 167
ft.0
h
1.0
0.5
0.2
0.1
f=O : UMsea
----.--:Mseq. -..--..-:MMlseq. -..._..._:&jp&q.
‘curve of 6/t -------_
.I 1 I I I I I I I I 6 10 30 50 70 so
t
Fig. 4. Comparison of error variance between UM sequence and the other sequences. (n = 6, U2 = 1).
the sequences with nearly twice the period of the unknown parameters can be constructed. In comparison with the other sequences, it is recognized that UM sequence gives an input sequence ~f~ciently near to the optimal one.
13ae authors wish to thank Frof H. Nagao of authors’ university for many helpful suggestions on block design problems.
REFERENCES
1.
2.
3.
W. D. T. Davies, Sysrem Identificafion for SelfAdaptive Control, Wiley, New York, 1970. R. P. Evans and P. A. W. Walker, Assessment of Drift Rejection Schemes Applied to On-Line Cross Correlation Experiments, int. J. Con&o/, 18, 33-56 (1973). K. R. Godfrey, The Application of Preudo-Random Sequences to industrial Processes and Nuclear Power Plants, I.F.A.C. Symposium on Identification and Process Purame- ter Estimation, Prague, 7.1 (1970).

S. TOMINAGA, et al.
4. I. G. Gumming. I:requcncy of Input Signal in Identification, 1.b;A.C. Symposium on Identification and Process Parameter Estimation, Prague, 7.8 (1970).
5. M. J. Levin, Optimum Estimation of Impulse Response in Presence of Noise, IRE Trans. Circuit Theory, (X-7, 1960. pp. 50-56.
6. V. S. Levadi, Design of Input Signals for Parameter Estimation, IEEE Trans. Automat. Contr.. AC-l 1, 1966, pp. 205-211.
7. R. M. Gagliardi, Input Selection for Parameter Identification in Discrete Systems, IEEE Trans. Automat. Contr. (Short Papersj, AC-12, 1961, pp. 597-599.
8. N. 1.1. Nahi and 1). E. Wallis, Jr., Optimal Inputs for Parameter Estimation in Dynamic System with White Observation Noise,JACC. 506-513 (1969).
9. R. Espostc and M. A. Schumer, Probing Linear I:ilters - Signal Design for The Detection Problem,IEf%‘Trans. Inform. Theory, IT-16, 167-171 (1970).
10. M. Aoki and R. M. Staley, On Input Signal Synthesis in Parameter Identification, Auto- matica, 6,43 l-440 (1970).
11. S. Arimoto and H. Kimura, Optimum Input Test Signals For System Identification - an Information-Theoreticdl Approach,lnt. .I. System Sci. 1, 271-290 (1971).
12. R. K. Mchra, Optimal Inputs for Linear System Identification,JACC, 81 I-820 (1972). 13. H. T. Hsu and J. E. Olson, Application of Coding Theory to the Construction of the
Singer Difference Sets, Int. J. Control 17, 1247-1250 (1973). 14. H. T. Hsu, Maximum Length Codes and Their Relation With the Incomplete Block
Design,Int. J. Control 18,209-215 (1973). 15. A. P. Sage and J. L. Melsa, Estimation Theory with Application to Communication
and Control, McGraw-Hill, New York, 1971. 16. M. Hall, Combinatrial Theory, Blaisdell, Waltham, 1967. 17. K. Yamamoto, Decomposition Fields of Difference Sets, Pacific J. Mathematics 13,
337-352 (1963).
Received April I 9 74
Related Documents










![Uncorrelated Far Active Galactic Nuclei Flaring With Their ...arXiv:1703.10964v3 [astro-ph.HE] 7 May 2017 Uncorrelated Far Active Galactic Nuclei Flaring With Their Delayed Ultra High](https://static.cupdf.com/doc/110x72/609f08a9a3524a5040005402/uncorrelated-far-active-galactic-nuclei-flaring-with-their-arxiv170310964v3.jpg)