Unconstrained 2D to Stereoscopic 3D Image and Video Conversion using Semi-Automatic Energy Minimization Techniques Raymond Phan, Richard Rzeszutek and Dimitrios Androutsos Dept. of Electrical & Computer Engineering Ryerson University – Toronto, Ontario, Canada Thursday, October 24 th , 2012 Chinese 6 Theatre – Hollywood, California, USA

Unconstrained 2D to Stereoscopic 3D Image and Video Conversion using Semi-Automatic Energy Minimization Techniques
Jul 13, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Unconstrained 2D to Stereoscopic 3D Image and Video Conversion using Semi-Automatic Energy Minimization Techniques
Raymond Phan, Richard Rzeszutek and Dimitrios Androutsos Dept. of Electrical & Computer Engineering Ryerson University – Toronto, Ontario, Canada
Thursday, October 24th, 2012 Chinese 6 Theatre – Hollywood, California, USA
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Outline of Presentation • Introduction & Motivation • Conversion Framework for Images
– Random Walks – Graph Cuts / Depth Priors
• Conversion Framework for Video – Keyframes to Label – Label Tracking
• Results – Images and Videos
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Introduction • Creating stereoscopic content from single-
view footage / 2D to 3D Conversion – Huge surge of popularity: Converting legacy
content is very appealing – Current accepted method is quite accurate, but
very labor intensive and difficult – Known as rotoscoping: Manual operators extract
objects in a single frame to create left-right views – Much research in 2D to 3D conversion performed
to alleviate difficulty, minimize time & cost
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Introduction – (2) • Goal of 2D to 3D Conversion: Depth Map
– B & W image showing depth at each point – Depth maps are the main tool for conversion
• Ultimate Goal: Automatic Conversion – Most methods concentrate here – Problem: Errors cannot be easily corrected – May require extensive pre/post-processing
• Solution? Semi-Automatic – Happy medium between auto & manual
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Motivation • Semi-auto: Some user effort, rest is automatic
– User marks objects/regions in the image on what is close/far from camera (dark/light intensities or colors)
– For video: Mark several keyframes • Allow for label propagation from first frame minimizing user effort
– Using above info, goal is to solve for the other depths in the entire image, or entire video
– Results: Single depth map or a sequence of them • How do we solve?
– Using mixture of two semi-automatic segmentation algorithms: Random Walks & Graph Cuts
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Images • Random Walks: Energy Minimization Scheme
– Starting from a user-defined label, what is the likelihood of a random walker visiting all unlabeled pixels in image
– Goal: Classify every pixel to belong to one of K labels – Pixel gets the label generating the highest likelihood
• Modify Random Walks to create depth maps – Likelihoods are probabilities: Spans the set [0,1] – User-defined depths and solved depths spans same set – Goal is to solve for one label: The depth!
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Images – (2) – Use Scale-Space Random Walks in our framework
• Pyramidal sampling scheme, with Random Walks applied to each resolution Merged via Geometric Mean
– User chooses values from [0,1] and brushes over image – 0: Dark intensity / color, 1: Light intensity / color – Resulting solved probabilities are directly used as depths
• Is this valid? – Yes! Psych. study done at Tel Aviv Uni. in Israel – As long as the user is perceptually consistent in marking
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
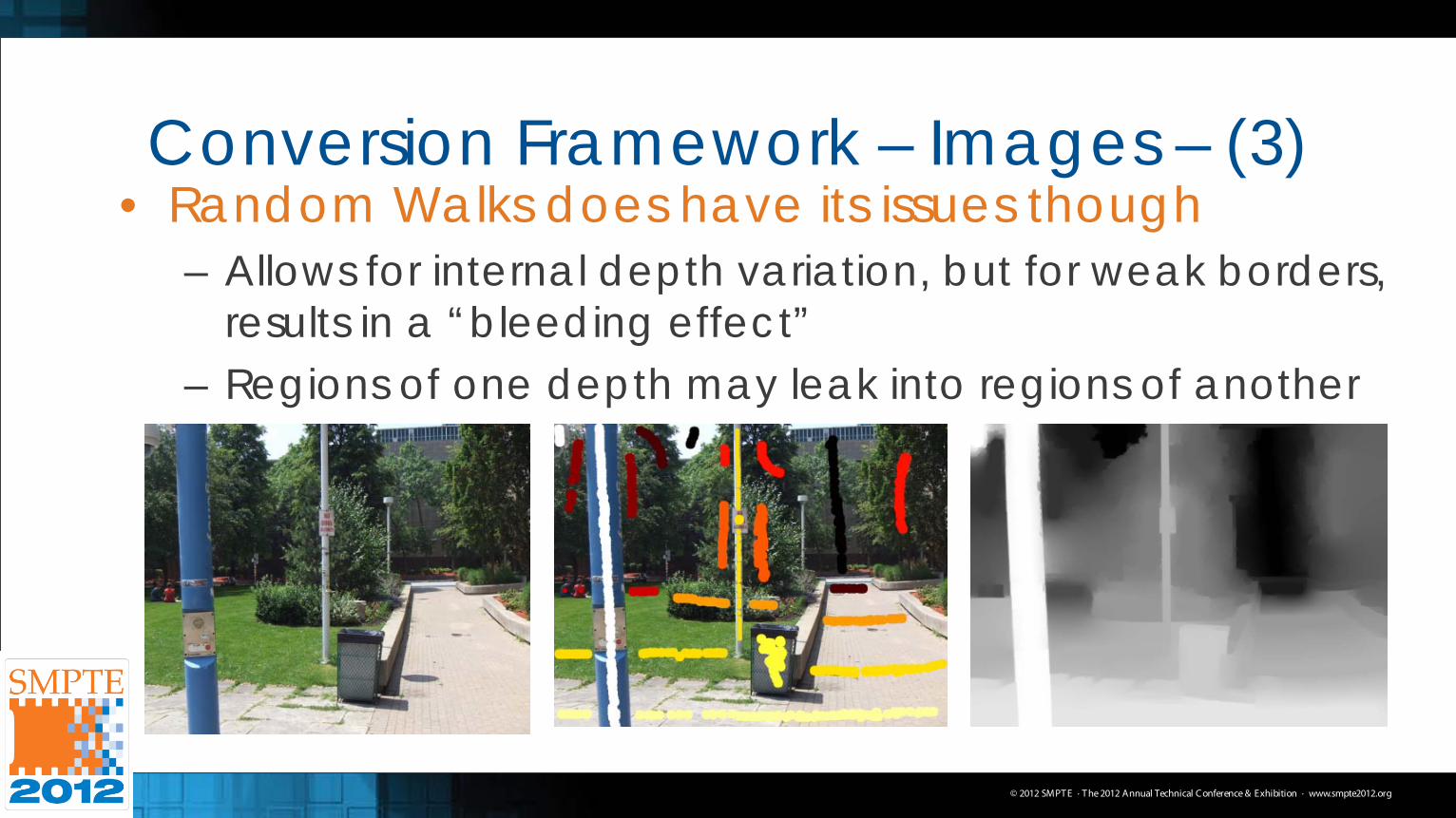
Conversion Framework – Images – (3) • Random Walks does have its issues though
– Allows for internal depth variation, but for weak borders, results in a “bleeding effect”
– Regions of one depth may leak into regions of another
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Images – (4) • Internal depth variation = Good!
– Minimizes cardboard cutout effect – RW generates depths not originally defined by user – But, we need to respect object boundaries
• Idea: Combine Random Walks with Graph Cuts – Graph Cuts = Hard Segmentation
• Only creates result with depths/labels provided by user – GC solves the MAP-MRF problem with user labels – Consider image as a weighted connected graph
• Solution is to solve the max-flow/min-cut of this graph

© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Images – (5) • NB: Making depth maps = Segmentation Problem
– Specifically, a multi-label segmentation problem – But! Graph Cuts: Binary segmentation problem (FG/BG) – Graph Cuts also has an integer labeling, not from [0,1]
• Must modify above to become multi-label – Each unique user-defined label is given an integer label – Binary segmentation is performed for each label
• FG: Label in question, BG: All of the other labels – Rest of the pixels are those we wish to label
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
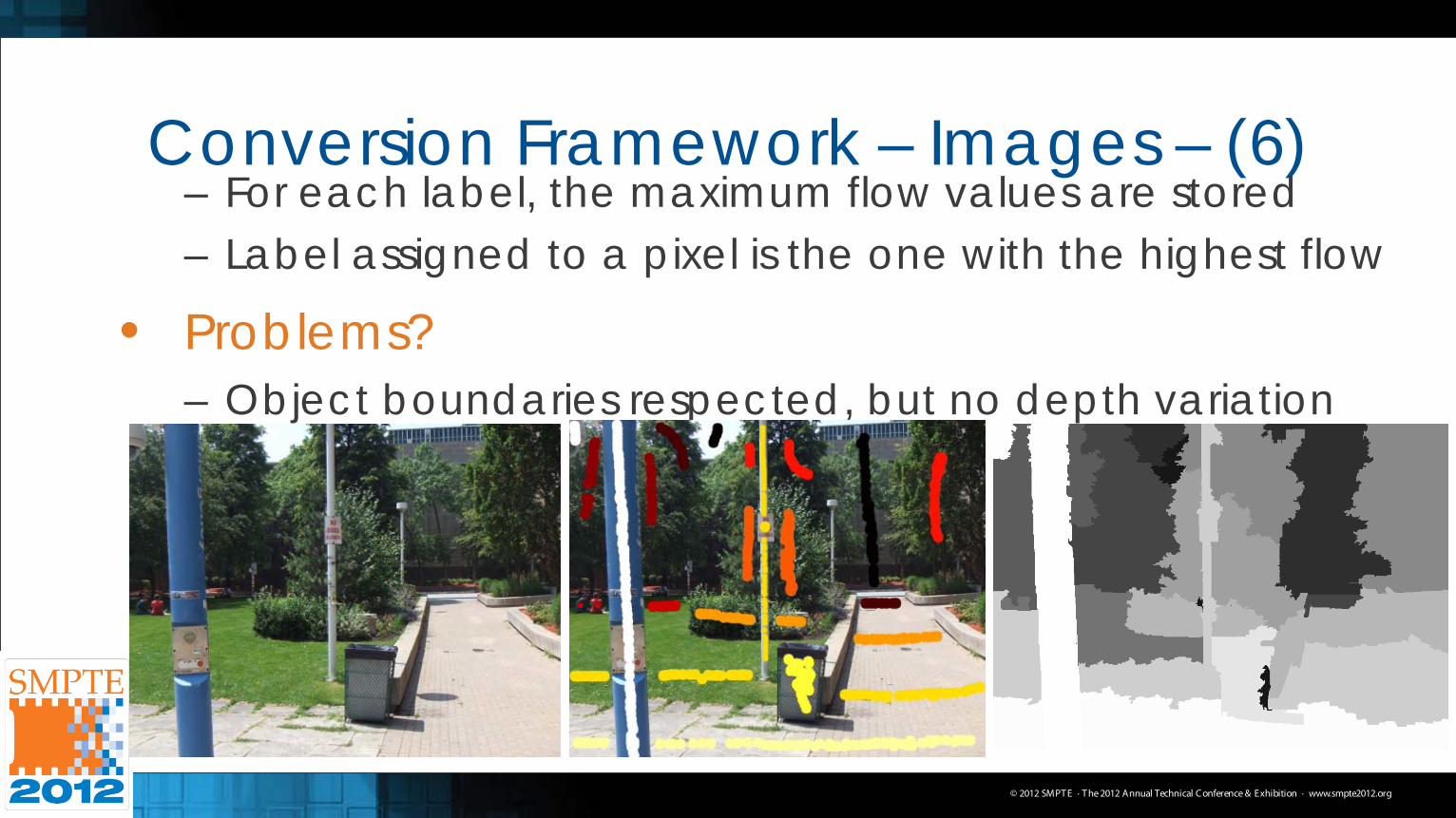
Conversion Framework – Images – (6) – For each label, the maximum flow values are stored – Label assigned to a pixel is the one with the highest flow
• Problems? – Object boundaries respected, but no depth variation
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Images – (7) • But! We can make use of this
– Merge Random Walks & Graph Cuts together – Create a depth prior: An initial depth map estimate – This is essentially Graph Cuts! – We merge by feeding depth prior as additional information into RW
• Before we merge… – Depth maps for RW and GC must be compatible with each other
• RW has depths of [0,1], GC has integer labels
– Map the user-defined labels from RW of set [0,1] to an integer set – Perform Graph Cuts on using this integer set, and map the integer
set back to the set of [0,1] Use a lookup table to do this
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
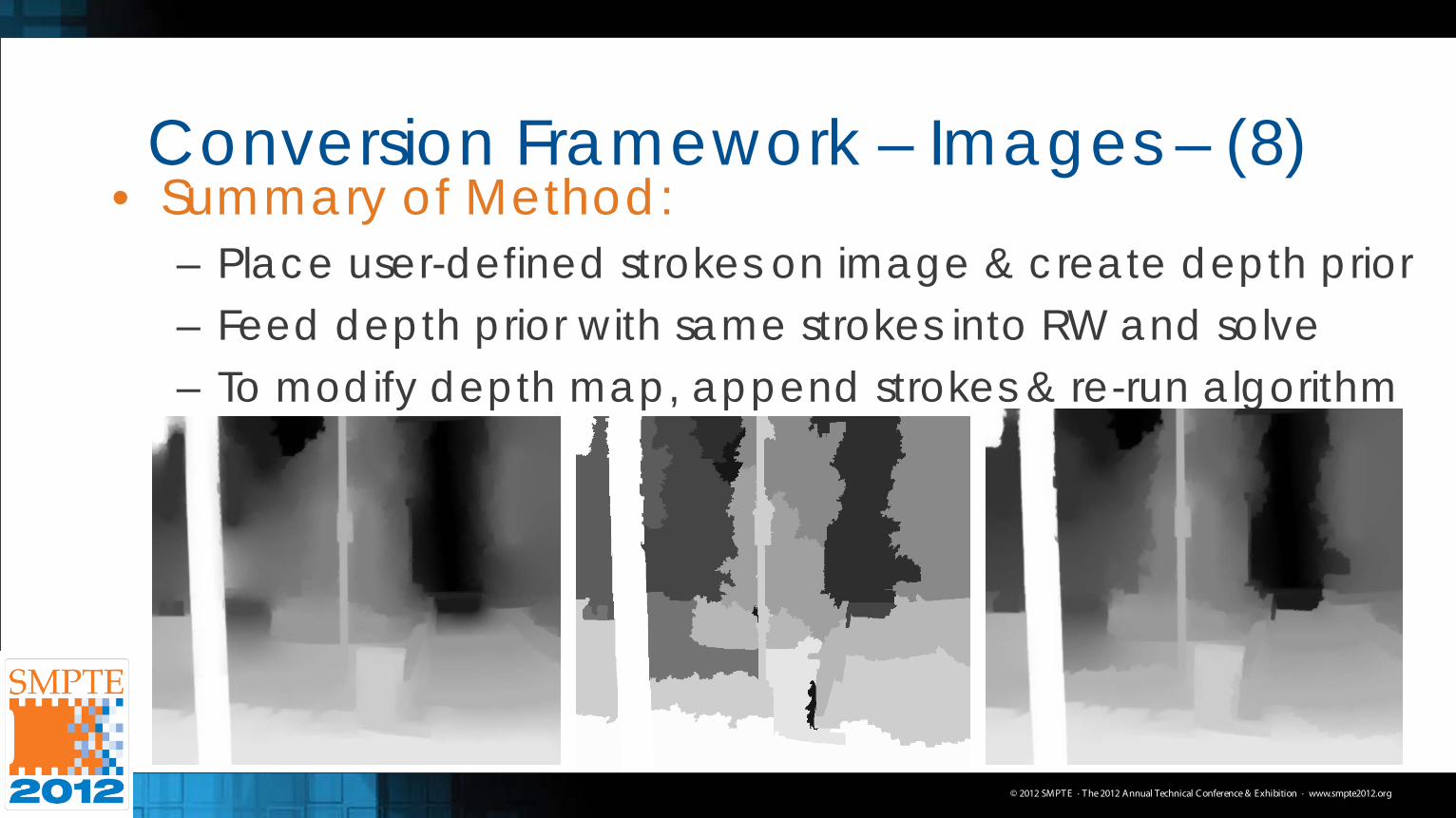
Conversion Framework – Images – (8) • Summary of Method:
– Place user-defined strokes on image & create depth prior – Feed depth prior with same strokes into RW and solve – To modify depth map, append strokes & re-run algorithm
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Video • Essentially the same as images, but we need to:
– Mark more than one image / keyframe • Result will be a sequence of depth maps
– Assume no abrupt changes in video • If there are, separate manually, or use shot detection
• Also must be aware of memory constraints – Intuitive to process each frame individually
• Fits well with memory, and can compute depth maps in parallel • However, this breaks temporal relationship Flickering
– Ideal to process all frames simultaneously in memory • But this will exhaust all available memory!
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Video – (2) • How do we solve?
– Use block processing to preserve temporal coherency – Process blocks of frames without exhausting memory – Overlapping frames within blocks are left unused
• Each block is independent of the others
• Back to labeling: How many frames do we label? – We allow the user the option of manually choosing
which ones to label – However, labeling only a small set of frames will result in
depth artifacts

© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Video – (3) • Example – From Sintel Sequence (http://www.sintel.org)
– Shows what happens with 3 frames labeled & when all are labeled
Depth maps: 3 frames labeled only
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
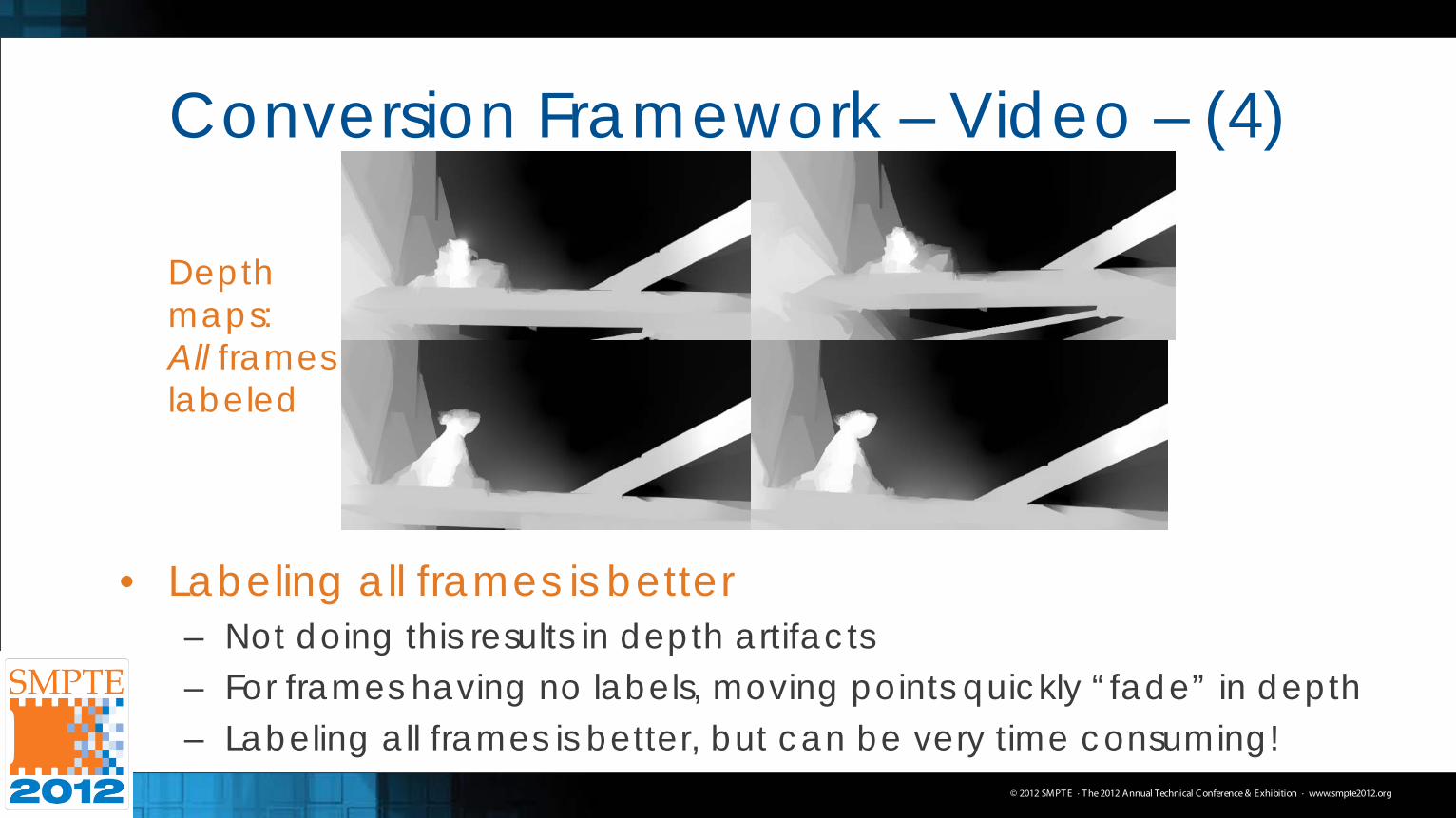
Conversion Framework – Video – (4)
Depth maps: All frames labeled
• Labeling all frames is better – Not doing this results in depth artifacts – For frames having no labels, moving points quickly “fade” in depth – Labeling all frames is better, but can be very time consuming!
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Video – (5) • Labeling all frames is better – Part II
– Instead of manually labeling all frames, label first frame and use a tracking algorithm to propagate the labels
– Adjust depths of labels when object depths change • Label Tracking?
– Would be very taxing to track all points in a stroke – Decompose a stroke at a particular depth into N points – Track each of these points separately – Reconstruct the stroke using spline interpolation
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conversion Framework – Video – (6) • Tracker used: Tracking-Learning-Detection (TLD)
– Long term tracker for unconstrained video by Kalal et al. – Simply draw a bounding box around object in first frame – After, trajectory is determined for the rest of the frames,
accounting for size and illumination changes • How do we use this?
– For each point in each decomposed stroke, surround a bounding box and track the region
– Reconstruct each stroke using the tracked points
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
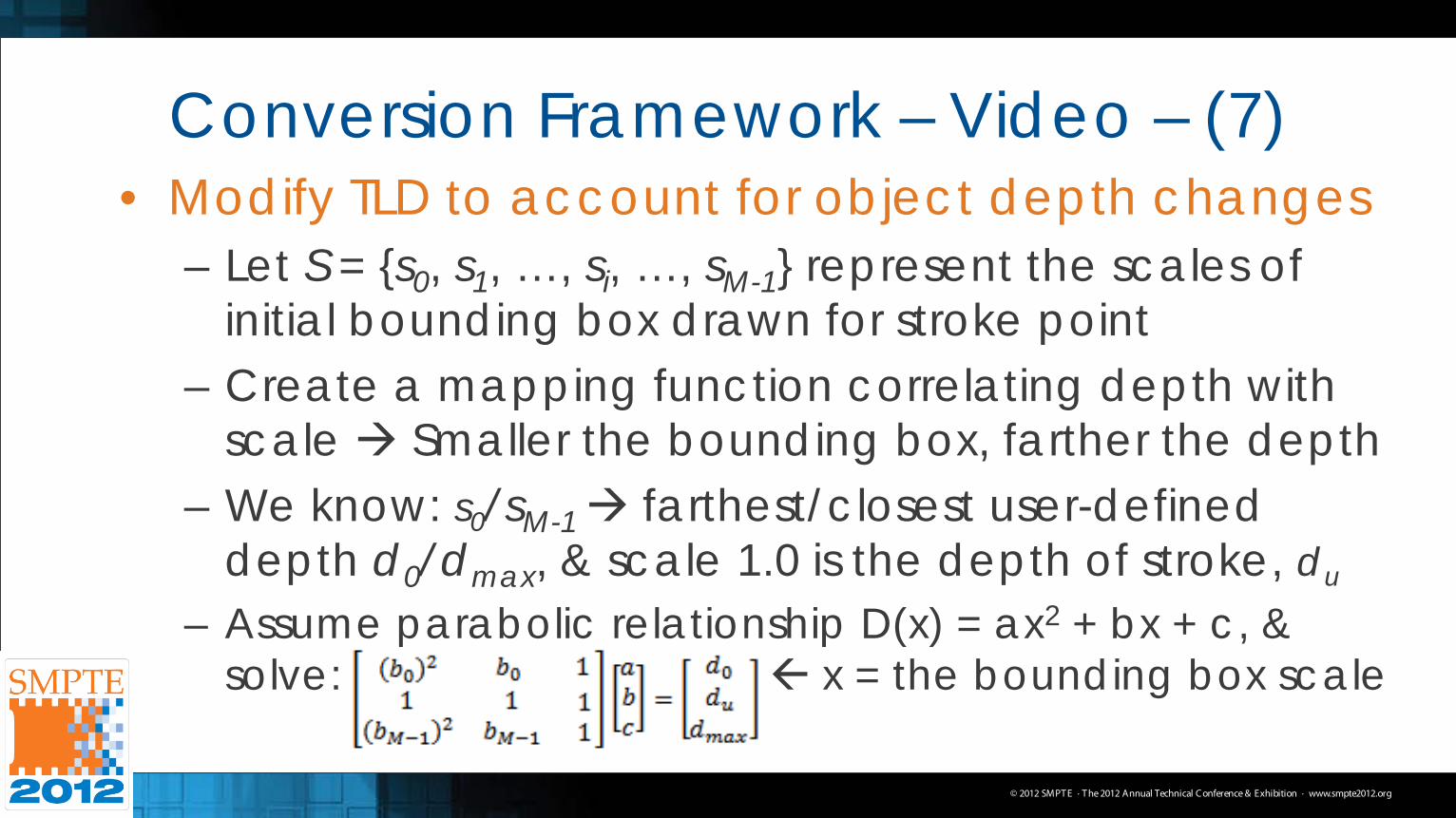
Conversion Framework – Video – (7) • Modify TLD to account for object depth changes
– Let S = {s0, s1, …, si, …, sM-1} represent the scales of initial bounding box drawn for stroke point
– Create a mapping function correlating depth with scale Smaller the bounding box, farther the depth
– We know: s0/sM-1 farthest/closest user-defined depth d0/dmax, & scale 1.0 is the depth of stroke, du
– Assume parabolic relationship D(x) = ax2 + bx + c, & solve: x = the bounding box scale

© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Results - Images Single Frame from Avatar Trailer
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
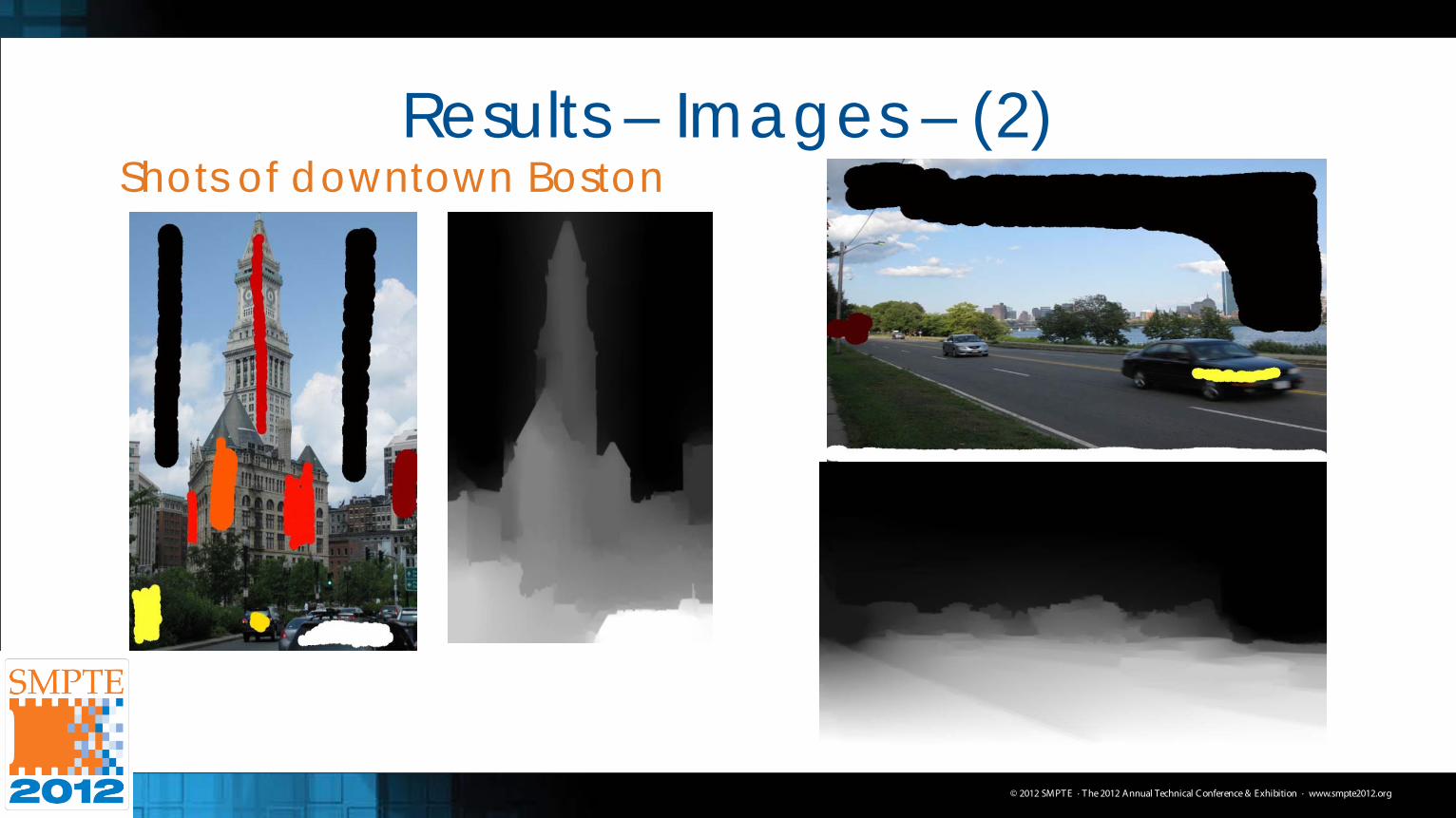
Results – Images – (2) Shots of downtown Boston
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
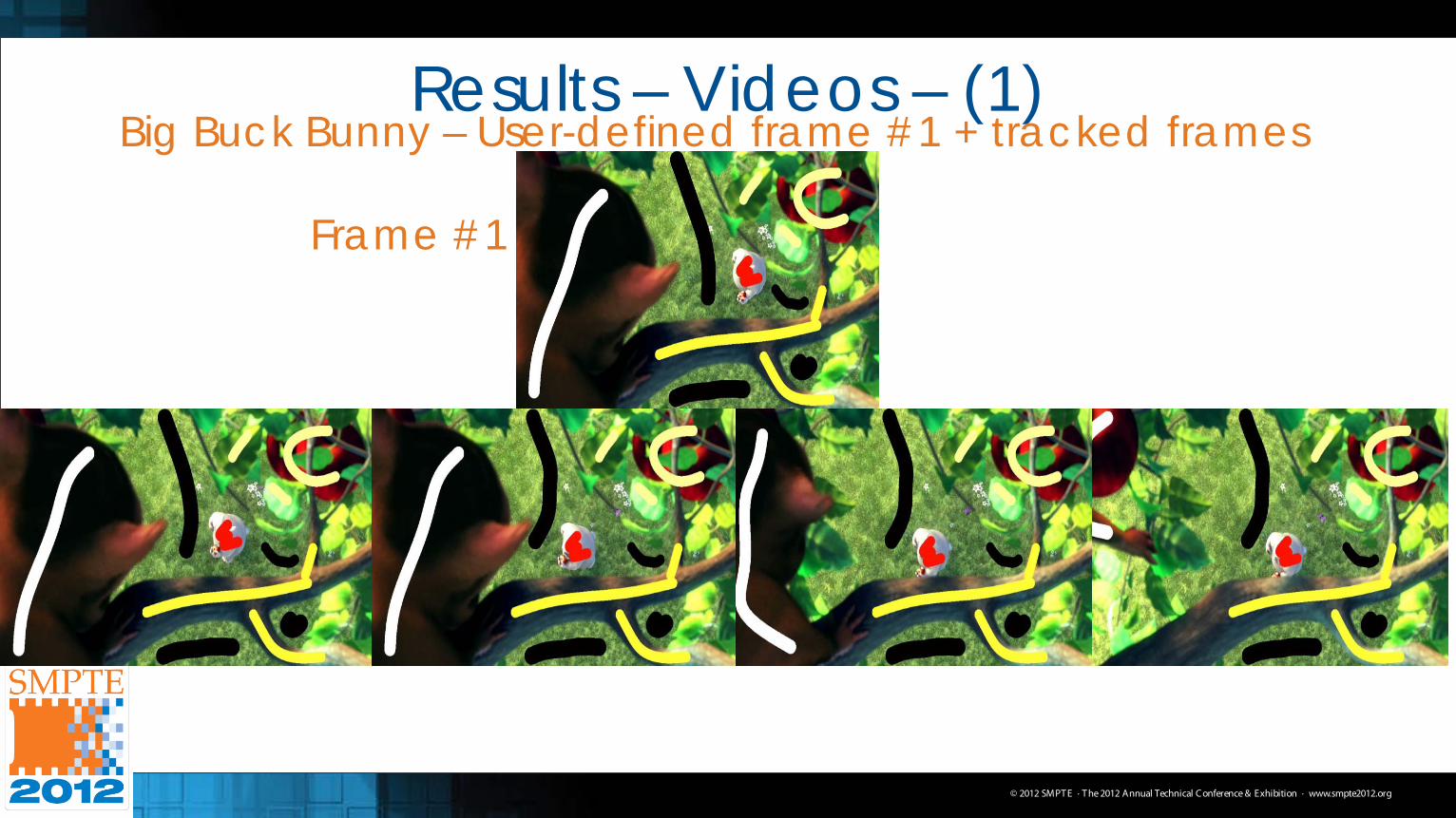
Results – Videos – (1) Big Buck Bunny – User-defined frame #1 + tracked frames
Frame #1
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
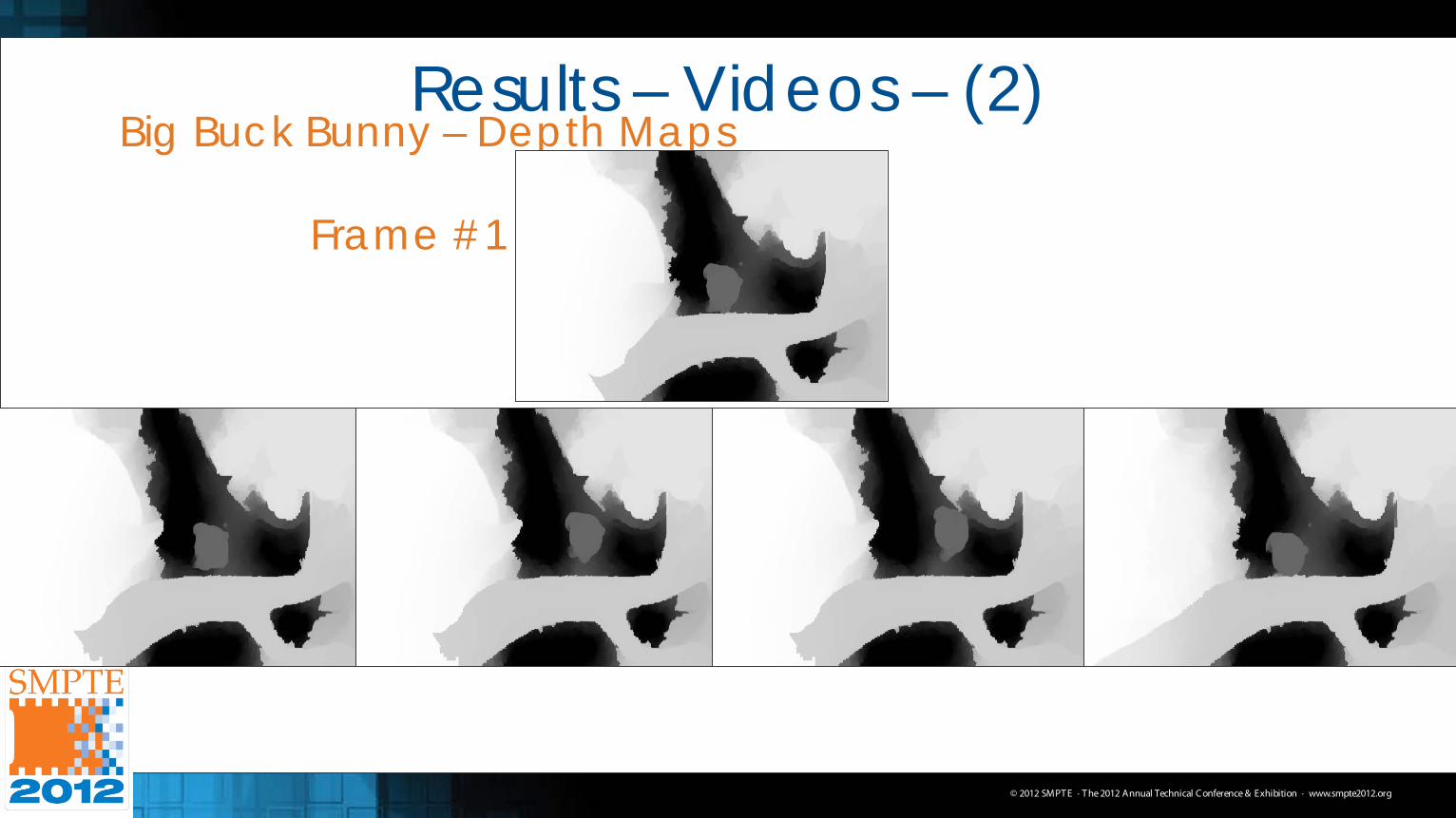
Results – Videos – (2) Big Buck Bunny – Depth Maps
Frame #1
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
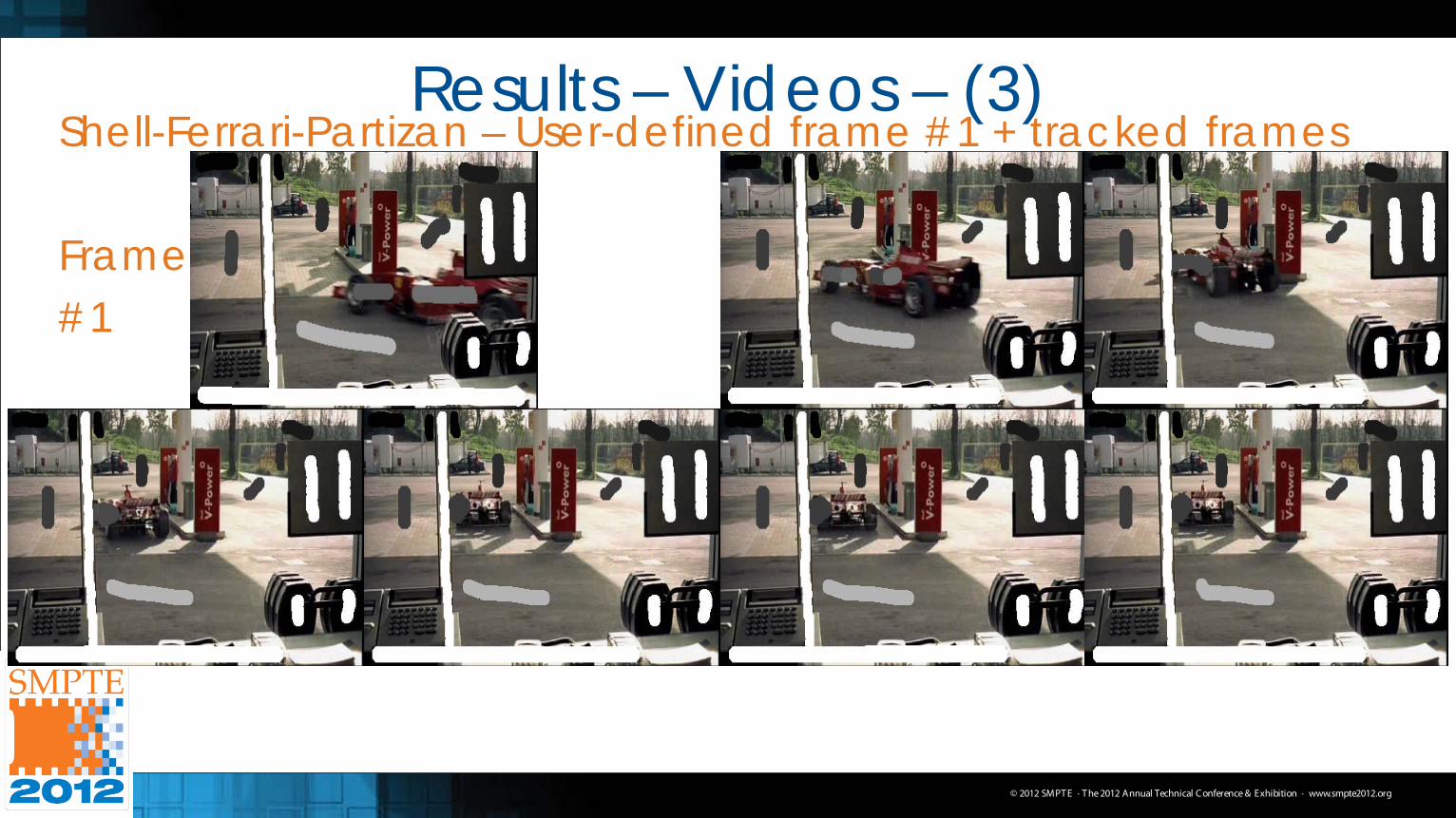
Results – Videos – (3) Shell-Ferrari-Partizan – User-defined frame #1 + tracked frames Frame #1
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
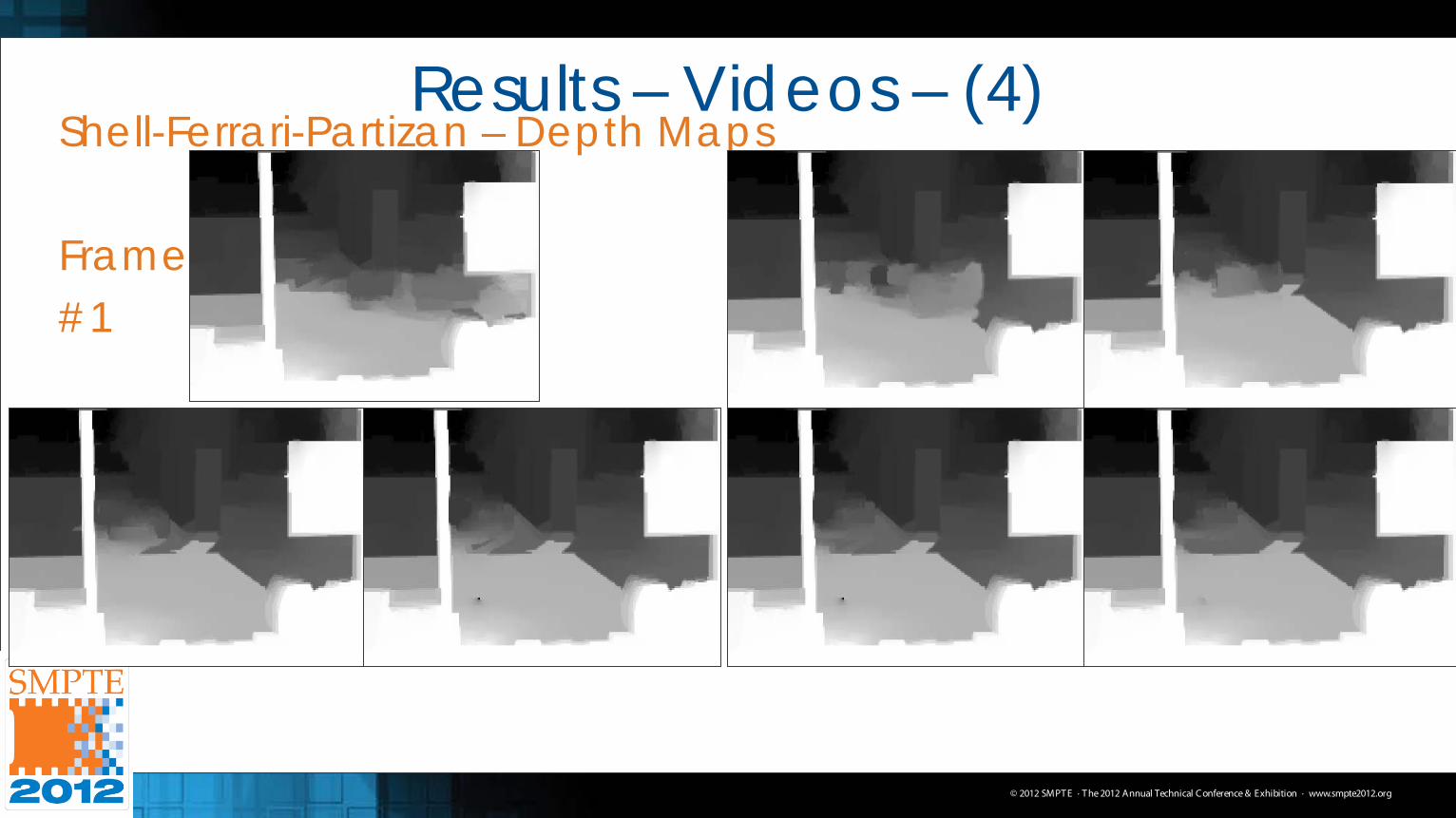
Results – Videos – (4) Shell-Ferrari-Partizan – Depth Maps Frame #1
© 2012 SMPT E · T he 2012 Annual Technical C onference & Exhibition · www.smpte2012.org
Conclusions • Made a semi-auto method for 2D-3D conversion
– Auto: Needs error correction & pre/post processing – Manual: Time-consuming and expensive – Happy medium between the two – Allows user to correct errors instantly and re-run fast
• Works for both images and video – Merged two segmentation algorithms together
• Combine merits of both methods together for better accuracy – Video: Modified a robust tracking algorithm to track
user-defined labels as well as dynamically adjust depths
Related Documents











