TUGAS BESAR SISTEM KENDALI Oleh : Nama : Muhammad Ridwan No. Bp : 1210951017 Dosen : Heru Dibyo Laksono,MT Asisten : Adityawarman Jurusan Teknik Elektro Universitas Andalas

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
TUGAS BESAR
SISTEM KENDALI
Oleh :Nama : Muhammad Ridwan
No. Bp : 1210951017
Dosen : Heru Dibyo Laksono,MT
Asisten : Adityawarman
Jurusan Teknik Elektro
Universitas Andalas
Padang
2014
BAB 1Pendahuluan
1.1 Pendahuluan
Dalam kehidupan modern saat ini suatu sistem dituntut
untuk lebih canggih lagi dan diusahakan memiliki sistematika
yang lebih bagus lagi. Salah satunya dengan merancang suatu
sistem kendali. Sistem kendali merupakan bagian yang
terintegrasi dari sistem kehidupan saat ini. Sebagai contoh :
kendali suhu ruang, mesin cuci, robot, pesawat, dan lain
sebagainya. Manusia bukan satu-satunya pembuat sistem kendali
otomatis. Justru secara alami telah ada, baik di tubuh manusia
itu sendiri maupun di alam semesta. Sebagai contoh: pankreas
yang mengendalikan kadar gula dalam darah. Mekanisme
berkeringat ketika kepanasan untuk mempertahankan suhu tubuh.
Pergerakan mata saat melihat sesuatu. Peredaran seluruh benda
di angkasa.
Dengan sistem kendali memungkinkan variabel yang ingin
dikendalikan dapat mencapai nilai yang diinginkan dengan
mekanisme umpan balik dan pengendalian. Dengan sistem kendali
memungkinkan adanya sistem yang stabil, akurat, dan tepat
waktu. Sistem kendali dapat dirancang melakukan pengendalian
secara otomatik. Di industri banyak dijumpai aplikasi sistem
ini menggunakan ‘Programmable Logic Controller (PLC)’.
Sistem kendali dapat dikatakan sebagai hubungan antara
komponen yang membentuk sebuah konfigurasi sistem, yang akan
menghasilkan tanggapan sistem yang diharapkan. Jadi harus ada
yang dikendalikan, yang merupakan suatu sistem fisis, yang
biasa disebut dengan kendalian (plant).
Masukan dan keluaran merupakan variabel atau besaran fisis.
Keluaran merupakan hal yang dihasilkan oleh kendalian, artinya
yang dikendalikan, sedangkan masukan adalah yang mempengaruhi
kendalian, yang mengatur keluaran. Kedua dimensi masukan dan
keluaran tidak harus sama.
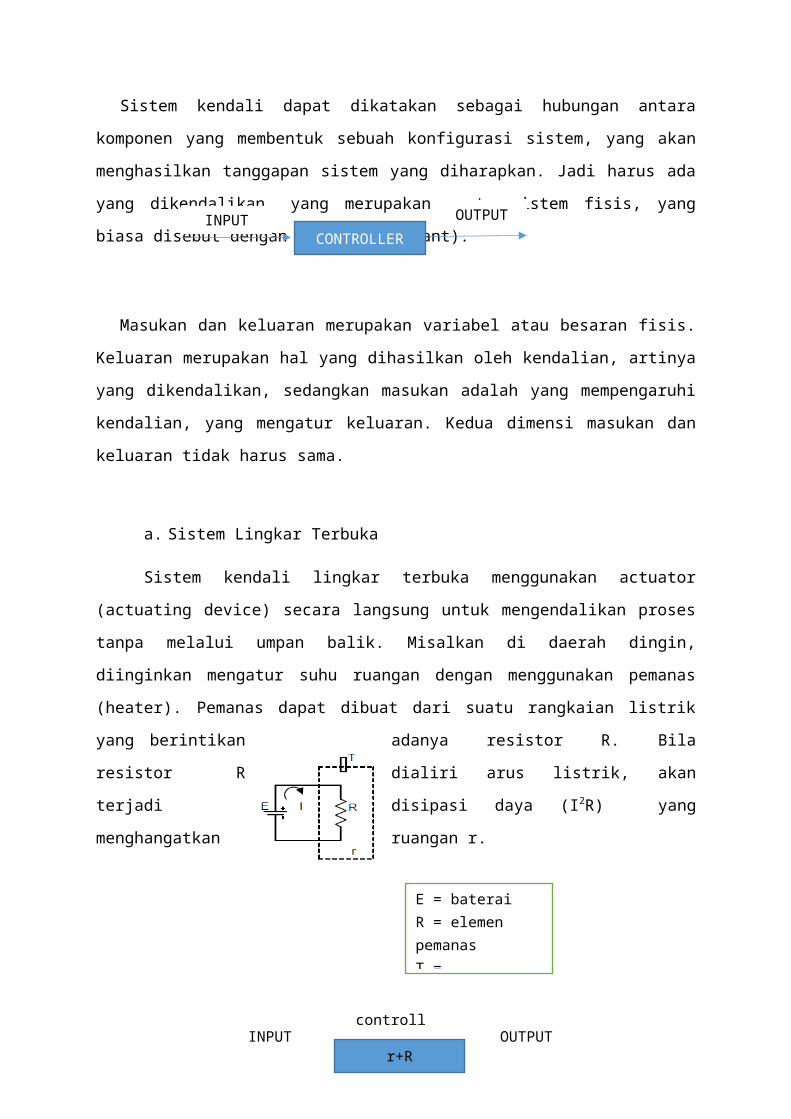
a. Sistem Lingkar Terbuka
Sistem kendali lingkar terbuka menggunakan actuator
(actuating device) secara langsung untuk mengendalikan proses
tanpa melalui umpan balik. Misalkan di daerah dingin,
diinginkan mengatur suhu ruangan dengan menggunakan pemanas
(heater). Pemanas dapat dibuat dari suatu rangkaian listrik
yang berintikan adanya resistor R. Bila
resistor R dialiri arus listrik, akan
terjadi disipasi daya (I2R) yang
menghangatkan ruangan r.
CONTROLLERINPUT OUTPUT
E = bateraiR = elemen pemanasT =
r+RINPUT OUTPUT
controll
Terlihat bahwa keluaran tidak mempengaruhi masukan. Sistem inidisebut sistem kendali lingkar terbuka.
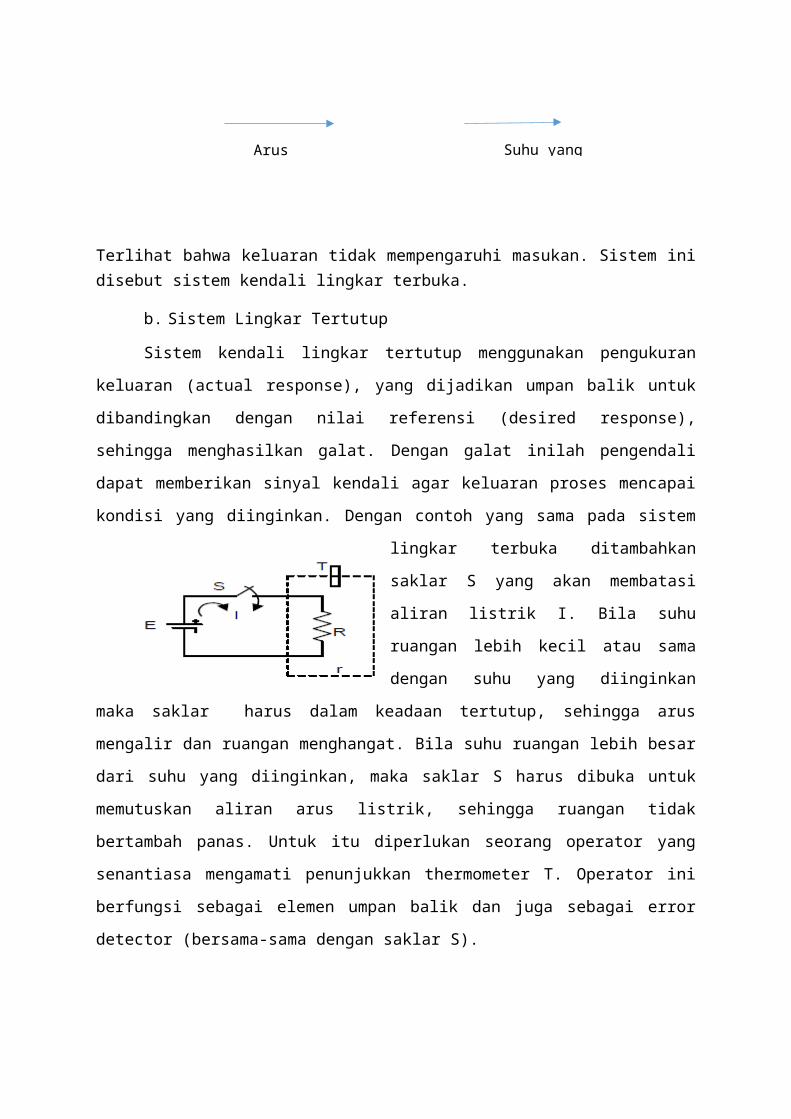
b. Sistem Lingkar Tertutup
Sistem kendali lingkar tertutup menggunakan pengukuran
keluaran (actual response), yang dijadikan umpan balik untuk
dibandingkan dengan nilai referensi (desired response),
sehingga menghasilkan galat. Dengan galat inilah pengendali
dapat memberikan sinyal kendali agar keluaran proses mencapai
kondisi yang diinginkan. Dengan contoh yang sama pada sistem
lingkar terbuka ditambahkan
saklar S yang akan membatasi
aliran listrik I. Bila suhu
ruangan lebih kecil atau sama
dengan suhu yang diinginkan
maka saklar harus dalam keadaan tertutup, sehingga arus
mengalir dan ruangan menghangat. Bila suhu ruangan lebih besar
dari suhu yang diinginkan, maka saklar S harus dibuka untuk
memutuskan aliran arus listrik, sehingga ruangan tidak
bertambah panas. Untuk itu diperlukan seorang operator yang
senantiasa mengamati penunjukkan thermometer T. Operator ini
berfungsi sebagai elemen umpan balik dan juga sebagai error
detector (bersama-sama dengan saklar S).
Suhu yangArus
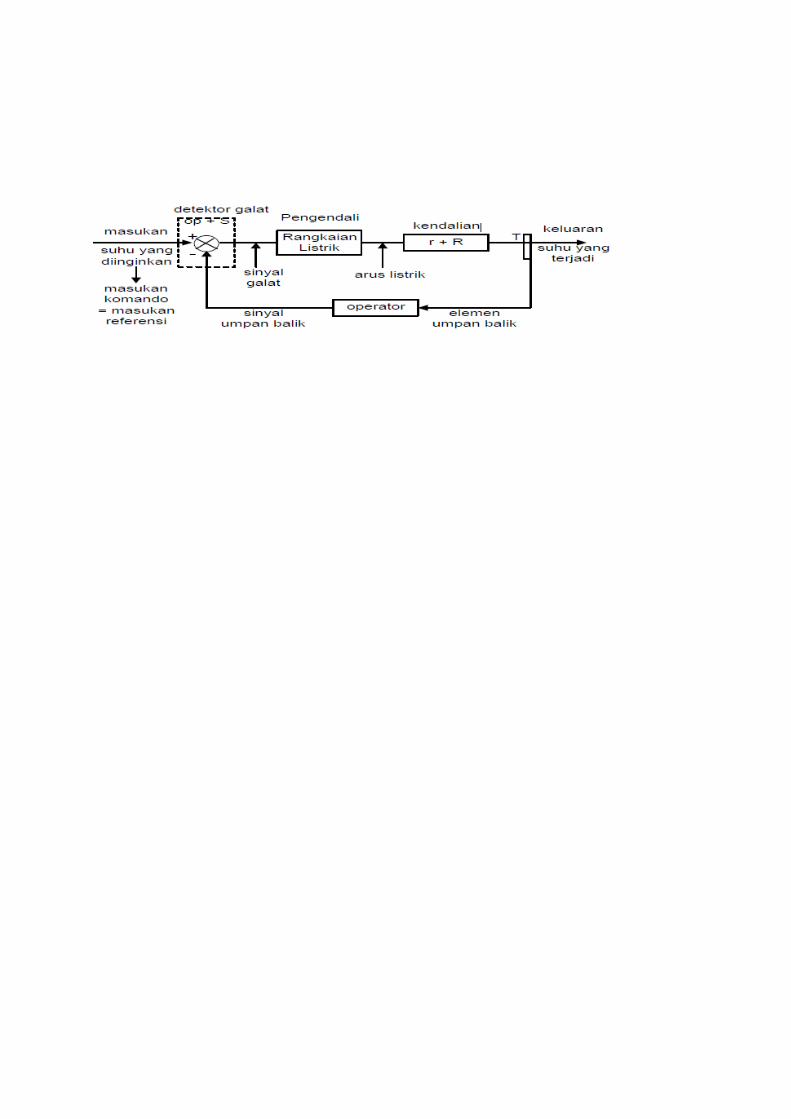
Operator berfungsi mengamati keluaran, lalu mengevaluasi(membandingkan keluaran dan masukannya) dan membangkitkansinyal penggerak yang akan menggerakkan sistem sehinggakeluaran seperti yang diinginkan. Terlihat bahwa keluaranmempengaruhi masukan (melalui operator). Sistem ini disebutsistem kendali lingkar tertutup. Beberapa istilah yang seringdipakai sebagai berikut :
a) Keluaran sistem merupakan variabel yang diatur(controlled variable)
b) Masukan sistem terdiri dari : Masukan komando (command input) = masukan
informatif = masukan fiktif, yang oleh masukantranduser diubah (bila perlu) menjadi masukanreferensi (reference input).
Masukan komando (command input) = masukaninformatif = masukan fiktif, yang oleh masukantranduser diubah (bila perlu) menjadi masukanreferensi (reference input)
Masukan referensi = masukan fisis bersama-samadengan sinyal umpan balik akan menghasilkansinyal penggerak (sinyal galat).
c) Sinyal galat merupakan masukan dari pengendali(controller).
d) Masukan kendalian dihasilkan oleh pengendali.e) Elemen umpan balik mengamati keluaran dan
mengumpanbalikkan ke masukan, yaitu dengan adanyasinyal umpan balik.
1.2 Fungsi alihDalam teori kendali, fungsi yang disebut fungsi alih
seringkali digunakan untuk mencirikan hubungan masukan dankeluaran dari sistem linier parameter konstan. Konsep fungsialih ini hanya digunakan pada sistem linier parameter konstan.Fungsi alih sistem linier parameter konstan didefinisikansebagai perbandingan dari transformasi Laplace keluaran dantransformasi Laplace masukan dengan asumsi semua kondisi awal

bernilai nol. Sistem linier parameter konstan dinyatakandengan persamaan linier diferensial berikut
a0 y+a1 y+......+an-1y+any=b0 x+b1x+...+bm-1x+bmx (n≥m)
Dimana y adalah keluaran sistem dan x adalah masukan sistem. Fungsi alih dari sistem ini diperoleh dengan mencari transformasi Laplace dari kedua persamaan (3.14) dengan asumsisemua kondisi awal bernilai nol.
Fungsi alih : G(s) = Y(s)X(s)
Contoh Tentukan fungsi alih dari rangkaian listrik R-C berikutini
Jawab :
Persamaan rangkaian
Bentuk transformasi Laplace (asumsi semua kondisi awal bernilai nol)
Fungsi alih
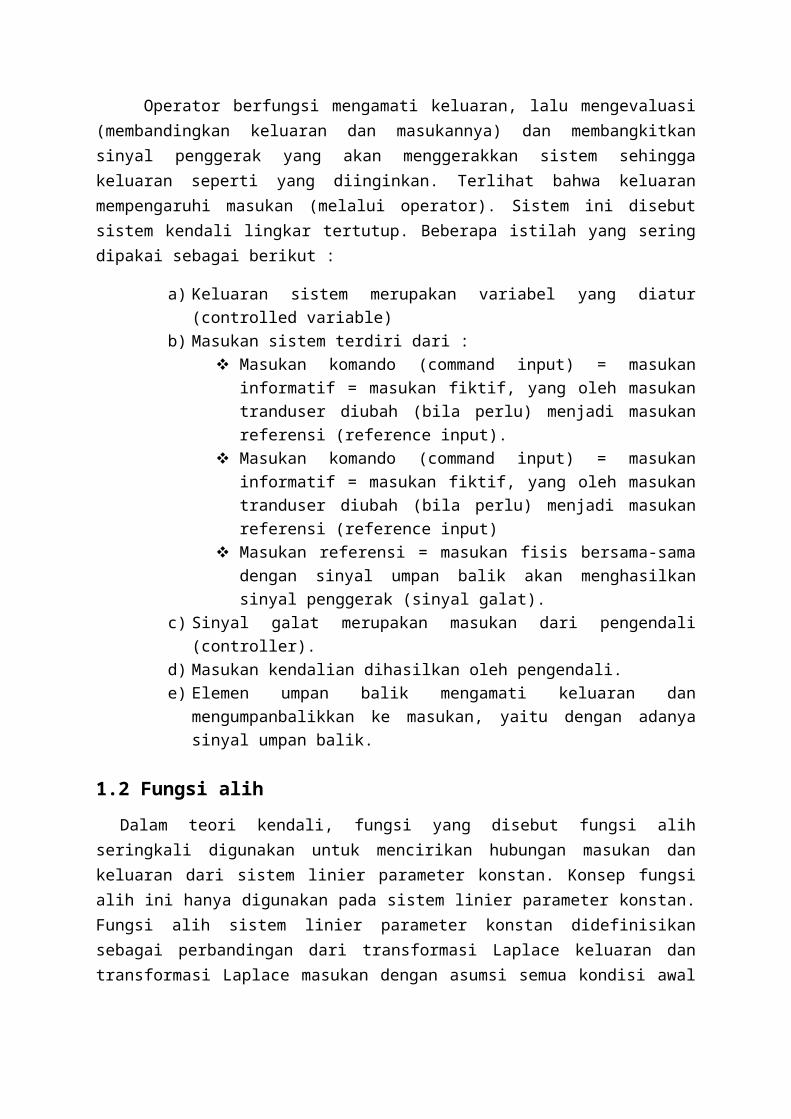
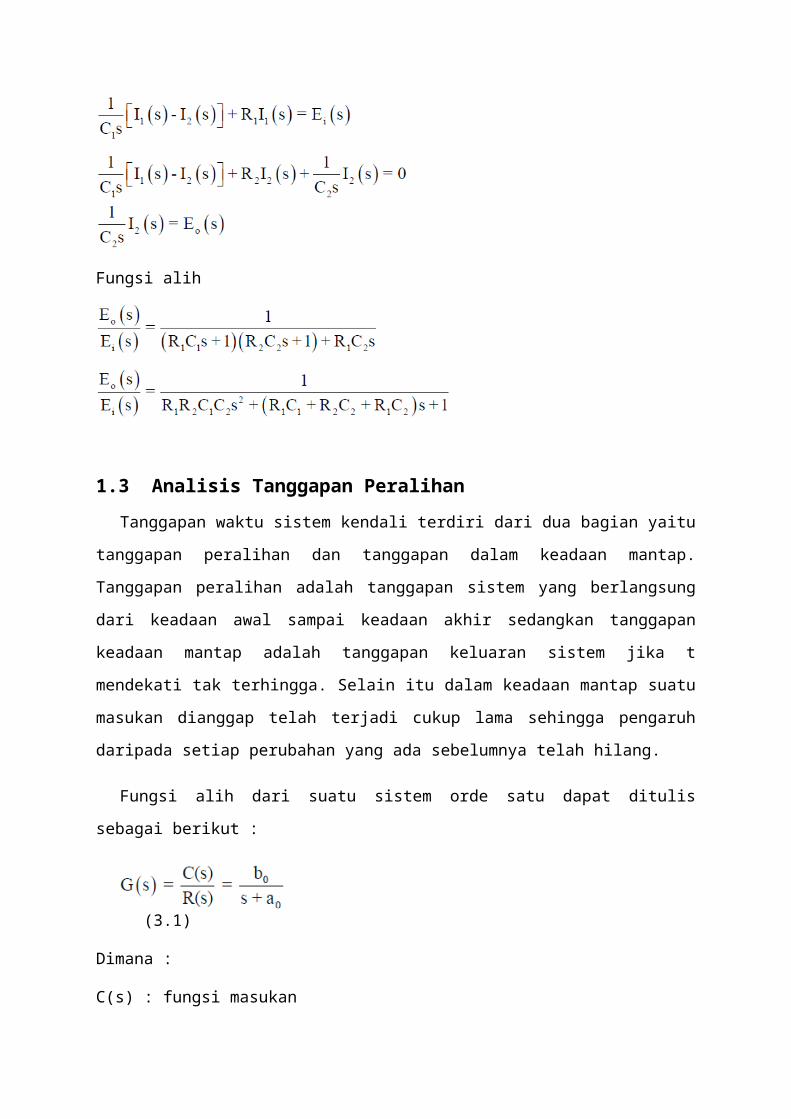
1.3 Analisis Tanggapan PeralihanTanggapan waktu sistem kendali terdiri dari dua bagian yaitu
tanggapan peralihan dan tanggapan dalam keadaan mantap.
Tanggapan peralihan adalah tanggapan sistem yang berlangsung
dari keadaan awal sampai keadaan akhir sedangkan tanggapan
keadaan mantap adalah tanggapan keluaran sistem jika t
mendekati tak terhingga. Selain itu dalam keadaan mantap suatu
masukan dianggap telah terjadi cukup lama sehingga pengaruh
daripada setiap perubahan yang ada sebelumnya telah hilang.
Fungsi alih dari suatu sistem orde satu dapat ditulis
sebagai berikut :
(3.1)
Dimana :
C(s) : fungsi masukan
R(s) : fungsi keluaran
Notasi yang lebih umum dari fungsi alih orde satu adalah :
(3.2)
dengan membandingkan persamaan (3.1) dan (3.2) diperoleh
(3.3)
Selain itu dapat juga diturunkan persamaan diferensial sistem dari persamaan (3.2) sebagai berikut :
(3.4)
Dengan menggunakan transformasi Laplace balik persamaan (3.4) menjadi
(3.5)
Selanjutnya dengan menggunakan transformasi Laplace dari persamaan (3.5) dan
memasukkan kondisi awalnya diperoleh
(3.6)
Penyelesaian untuk persamaan (3.6) sebagai berikut
(3.7)
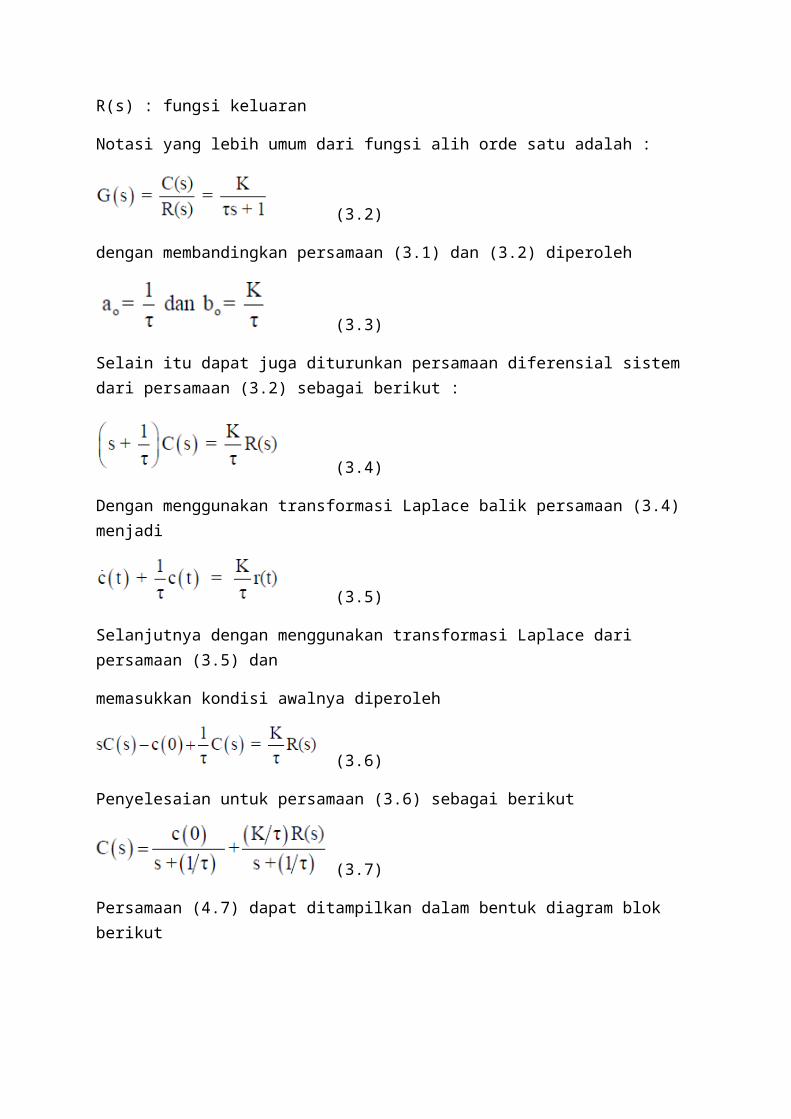
Persamaan (4.7) dapat ditampilkan dalam bentuk diagram blok berikut
Gambar 3.1 Sistem Orde Pertama dengan Kondisi Awal
Dengan demikian, kondisi awal
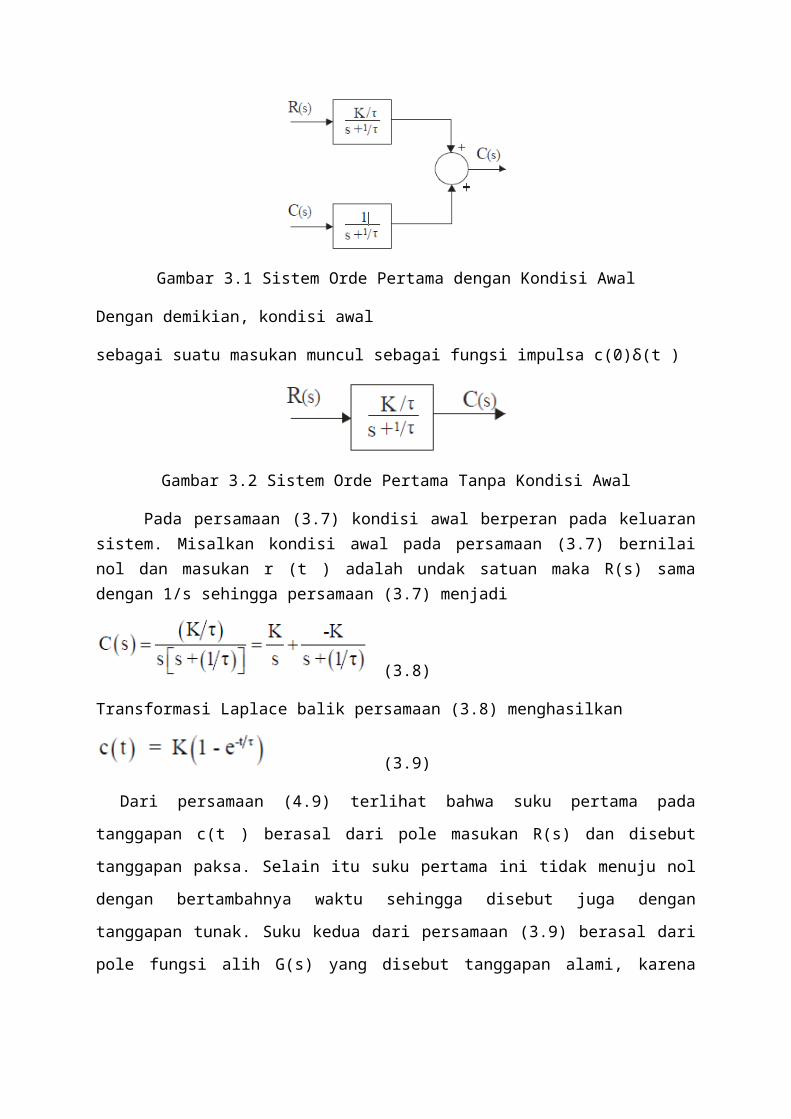
sebagai suatu masukan muncul sebagai fungsi impulsa c(0)δ(t )
Gambar 3.2 Sistem Orde Pertama Tanpa Kondisi Awal
Pada persamaan (3.7) kondisi awal berperan pada keluaransistem. Misalkan kondisi awal pada persamaan (3.7) bernilainol dan masukan r (t ) adalah undak satuan maka R(s) samadengan 1/s sehingga persamaan (3.7) menjadi
(3.8)
Transformasi Laplace balik persamaan (3.8) menghasilkan
(3.9)
Dari persamaan (4.9) terlihat bahwa suku pertama pada
tanggapan c(t ) berasal dari pole masukan R(s) dan disebut
tanggapan paksa. Selain itu suku pertama ini tidak menuju nol
dengan bertambahnya waktu sehingga disebut juga dengan
tanggapan tunak. Suku kedua dari persamaan (3.9) berasal dari
pole fungsi alih G(s) yang disebut tanggapan alami, karena
suku kedua ini menuju nol dengan bertambahnya waktu disebut
juga dengan tanggapan peralihan.
Contoh : Tentukan tanggapan sistem untuk masukan undak
satuan dengan fungsi alih lingkar terbuka sebagai berikut
Jawab : dengan menggunakan matlab
clc
clear all
close all
% Contoh Soal 4-1
num = [ 0 5];
den = [ 0.75 0.75];
%
[r,p,k] = residue(num,den)
%
step(num,den)
grid on
title('Tanggapan Terhadap Masukan Undak Satuan ')
ylabel('Keluaran')
xlabel('t detik')
Hasil programr =
6.6667
p =
-1
k = []
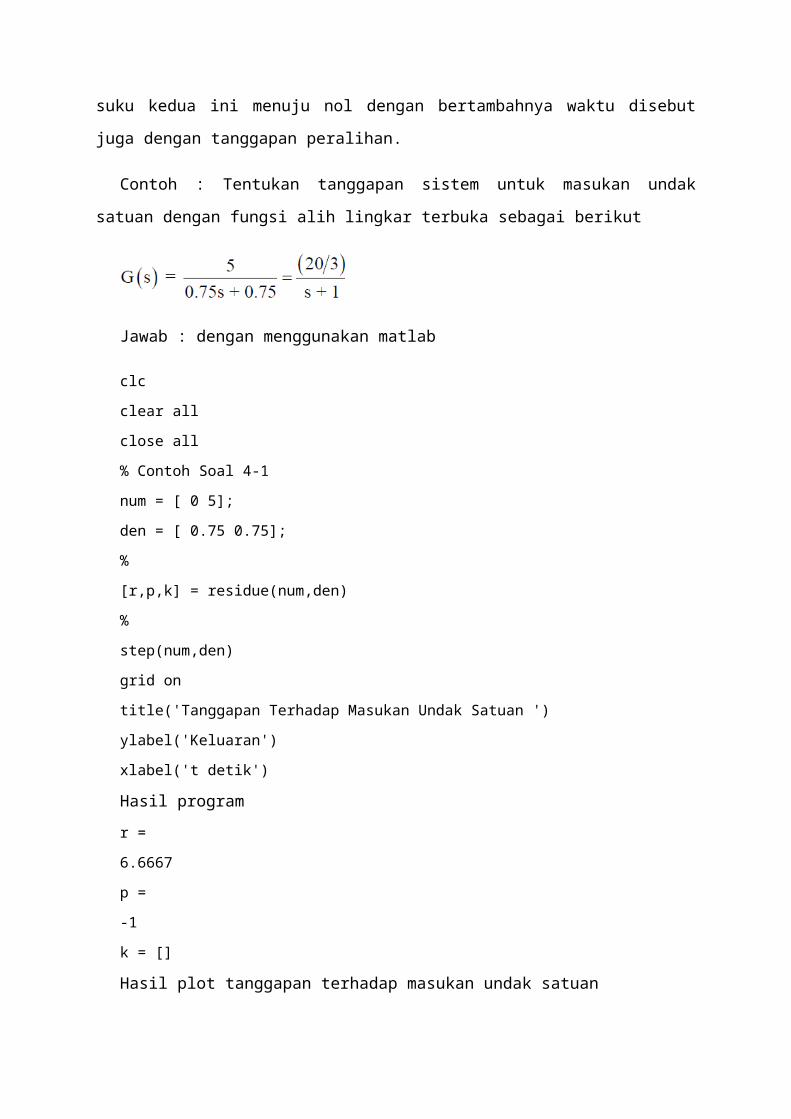
Hasil plot tanggapan terhadap masukan undak satuan
Gambar 3.3 Tanggapan Sistem Terhadap Masukan Undak Satuan
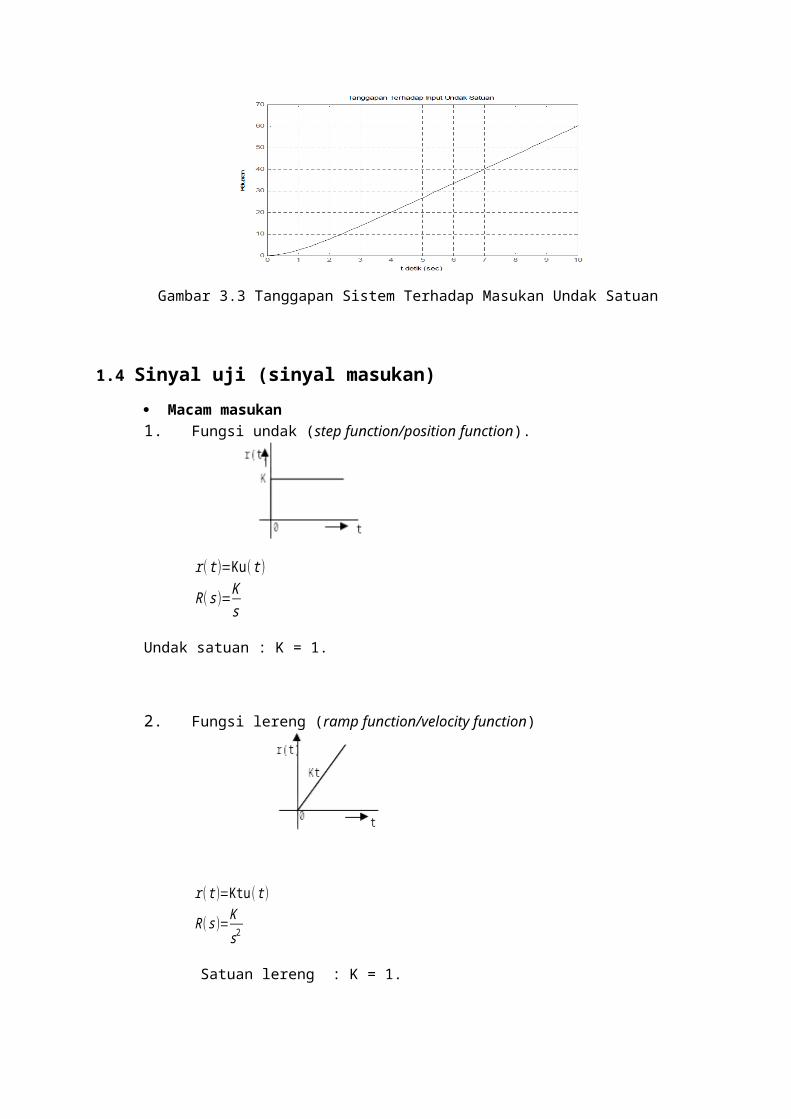
1.4 Sinyal uji (sinyal masukan) Macam masukan1. Fungsi undak (step function/position function).
r(t)=Ku(t)
R(s)=Ks
Undak satuan : K = 1.
2. Fungsi lereng (ramp function/velocity function)
r(t)=Ktu(t)
R(s)=Ks2
Satuan lereng : K = 1.
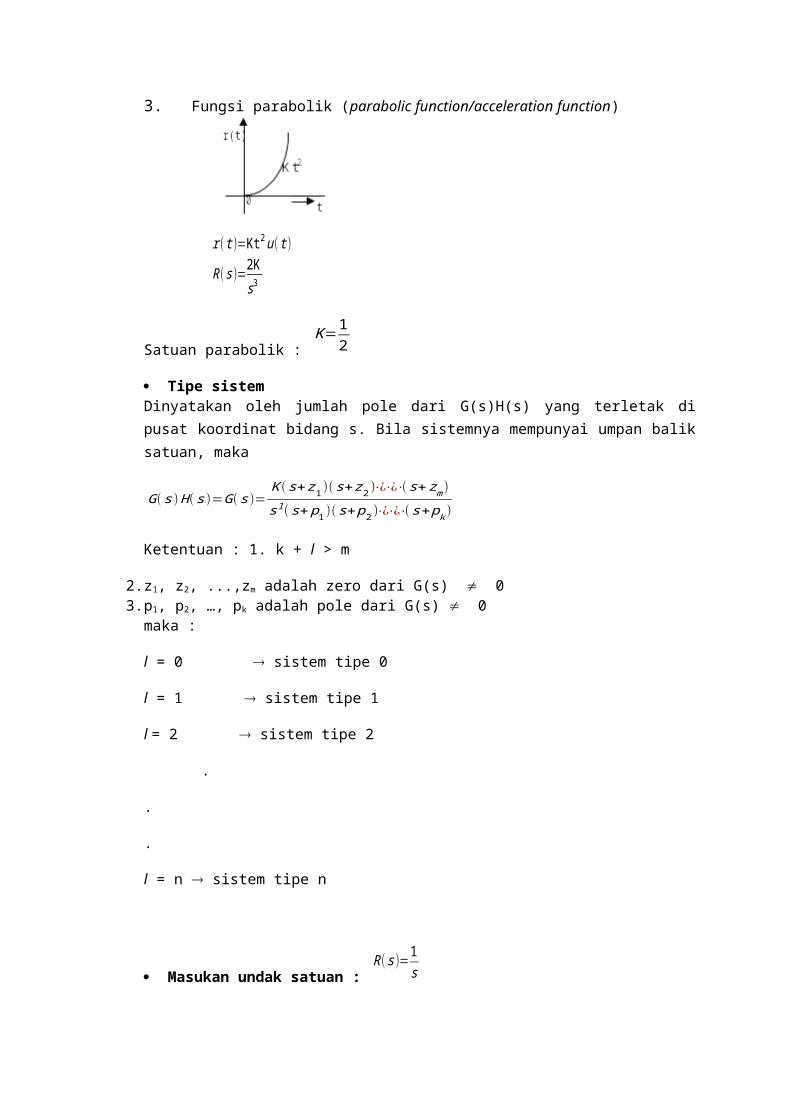
3. Fungsi parabolik (parabolic function/acceleration function)
r(t)=Kt2u(t)
R(s)=2Ks3
Satuan parabolik : K=
12
Tipe sistemDinyatakan oleh jumlah pole dari G(s)H(s) yang terletak dipusat koordinat bidang s. Bila sistemnya mempunyai umpan baliksatuan, maka
G(s)H(s)=G(s)=K(s+z1)(s+z2)⋅¿⋅¿⋅(s+zm)sl(s+p1)(s+p2)⋅¿⋅¿⋅(s+pk)
Ketentuan : 1. k + l > m
2.z1, z2, ...,zm adalah zero dari G(s) 03.p1, p2, …, pk adalah pole dari G(s) 0
maka :
l = 0 sistem tipe 0
l = 1 sistem tipe 1
l = 2 sistem tipe 2
.
.
.
l = n sistem tipe n
Masukan undak satuan : R(s)=
1s

e(t)ss=lim
s→0s
1s
1+G(s)=lim
s→0
11+G(s)
=1
1+lims→0
G(s)
Bila : Kp=lims→0
G(s), maka
e(t)ss=1
1+Kp
Untuk tipe 0 :
Kp=
Kz1z2⋅¿⋅zmp1p2⋅¿⋅¿pk
⇒e(t)ss=1
1+Kp
Untuk tipe 1 :
Kp=¥⇒e(t)ss=0
Untuk tipe 2 :
Kp=¥⇒e(t)ss=0
Masukan satuan lereng : R(s)= 1
s2
e(t)ss=lim
s→0s
1s2
1+G(s)=lim
s→0
1sG(s)
=1
lims→0
sG(s)
Bila Kv=lim
s→0sG(s)
, maka e(t)ss=
1Kv
Untuk tipe 0 :
Kv=0⇒e(t)ss=¥
Untuk tipe 1 :
Kv=K pi=1
mzi
pj=1
kpj
⇒e(t)ss=1Kv
Untuk tipe 2 :
Kv=¥⇒e(t)ss=0
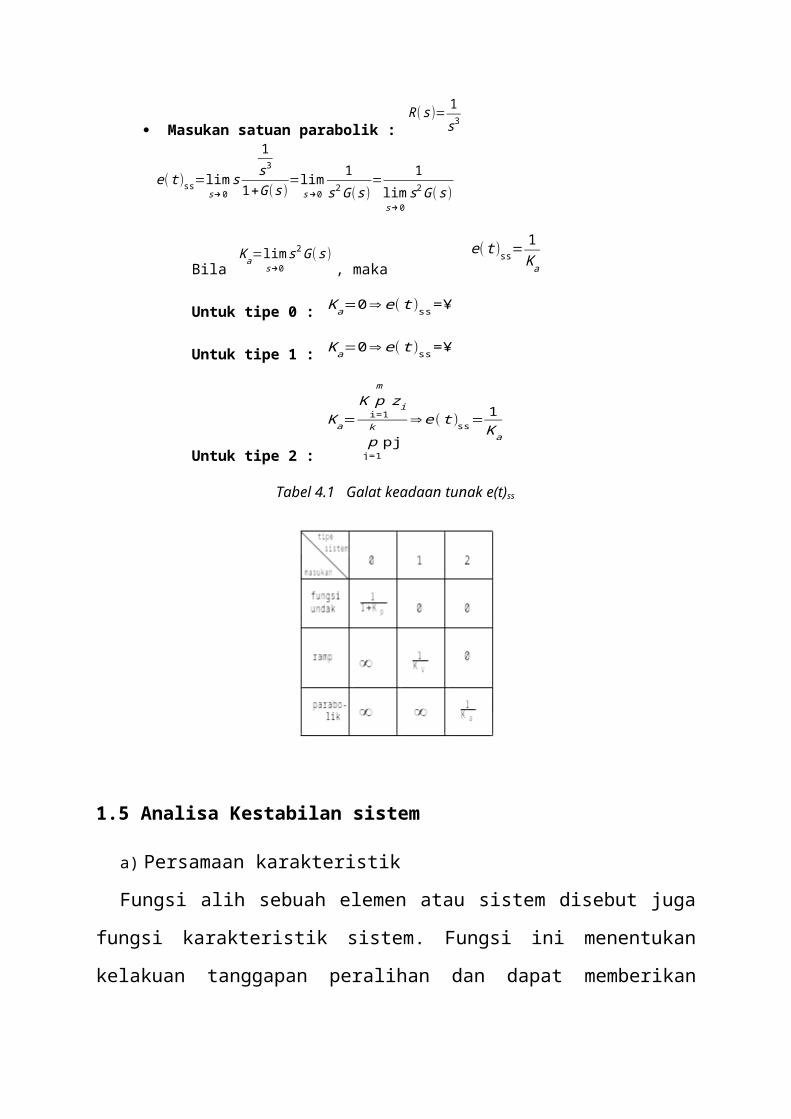
Masukan satuan parabolik : R(s)=
1s3
e(t)ss=lim
s→0s
1s3
1+G(s)=lim
s→0
1s2G(s)
=1
lims→0
s2G(s)
Bila Ka=lim
s→0s2G(s)
, maka e(t)ss=
1Ka
Untuk tipe 0 : Ka=0⇒e(t)ss=¥
Untuk tipe 1 : Ka=0⇒e(t)ss=¥
Untuk tipe 2 :
Ka=K pi=1
mzi
pj=1
kpj
⇒e(t)ss=1Ka
Tabel 4.1 Galat keadaan tunak e(t)ss
1.5 Analisa Kestabilan sistem
a) Persamaan karakteristik
Fungsi alih sebuah elemen atau sistem disebut juga
fungsi karakteristik sistem. Fungsi ini menentukan
kelakuan tanggapan peralihan dan dapat memberikan
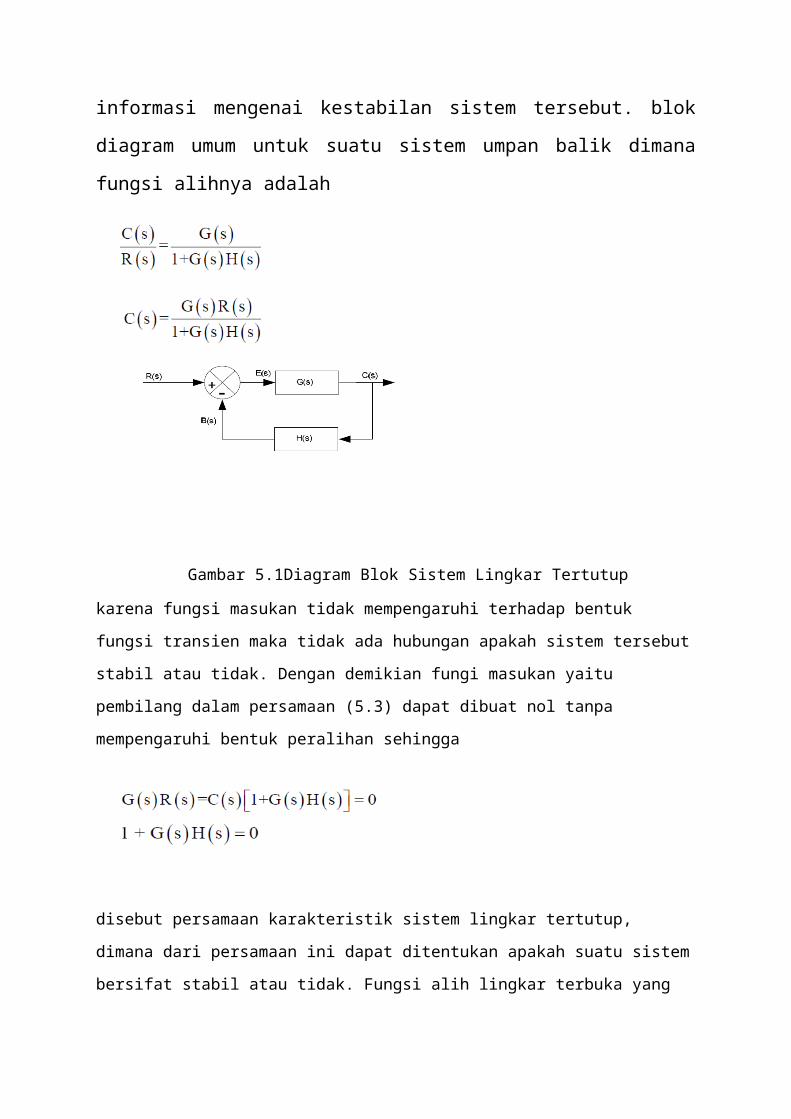
informasi mengenai kestabilan sistem tersebut. blok
diagram umum untuk suatu sistem umpan balik dimana
fungsi alihnya adalah
Gambar 5.1Diagram Blok Sistem Lingkar Tertutup
karena fungsi masukan tidak mempengaruhi terhadap bentuk
fungsi transien maka tidak ada hubungan apakah sistem tersebut
stabil atau tidak. Dengan demikian fungi masukan yaitu
pembilang dalam persamaan (5.3) dapat dibuat nol tanpa
mempengaruhi bentuk peralihan sehingga
disebut persamaan karakteristik sistem lingkar tertutup,
dimana dari persamaan ini dapat ditentukan apakah suatu sistem
bersifat stabil atau tidak. Fungsi alih lingkar terbuka yang
dinyatakan oleh G(s)H(s) dan dituliskan dalam bentuk
perbandingan dua buah polinomial yaitu N(s) dan D(s) berikut
Dengan menggantikan harga ini ke dalam persamaan (5.15)diperoleh
karena menurut persamaan (5.15), 1 + GsHs0 maka daripersamaan (5.17) berlaku
Contoh
Jika pada Gambar 5.3 fungsi alihnya adalah
Persamaan karakteristik adalah
berubah menjadi
maka akar-akarnya : r1 = -4 dan r1 = -1
b) Kriteria Routh
Penentuan kestabilan suatu sistem berdasarkan persamaan
karakteristik akan mengakibatkan kesulitan bagi persamaan yang
tingkatannya (orde) yang lebih tinggi. Kriteria ini merupakan
metode aljabar untuk menentukan kestabilan dalam wawasan s
(Laplace). Cara ini akan menunjukkan adanya akar-akar yang
tidak stabil beserta jumlahnya tetapi tidak menentukan nilai
atau kemungkinan cara untuk mencegah ketidakstabilan.
Prosedur penentuan stabilitas berdasarkan kriteria Routhberikut :
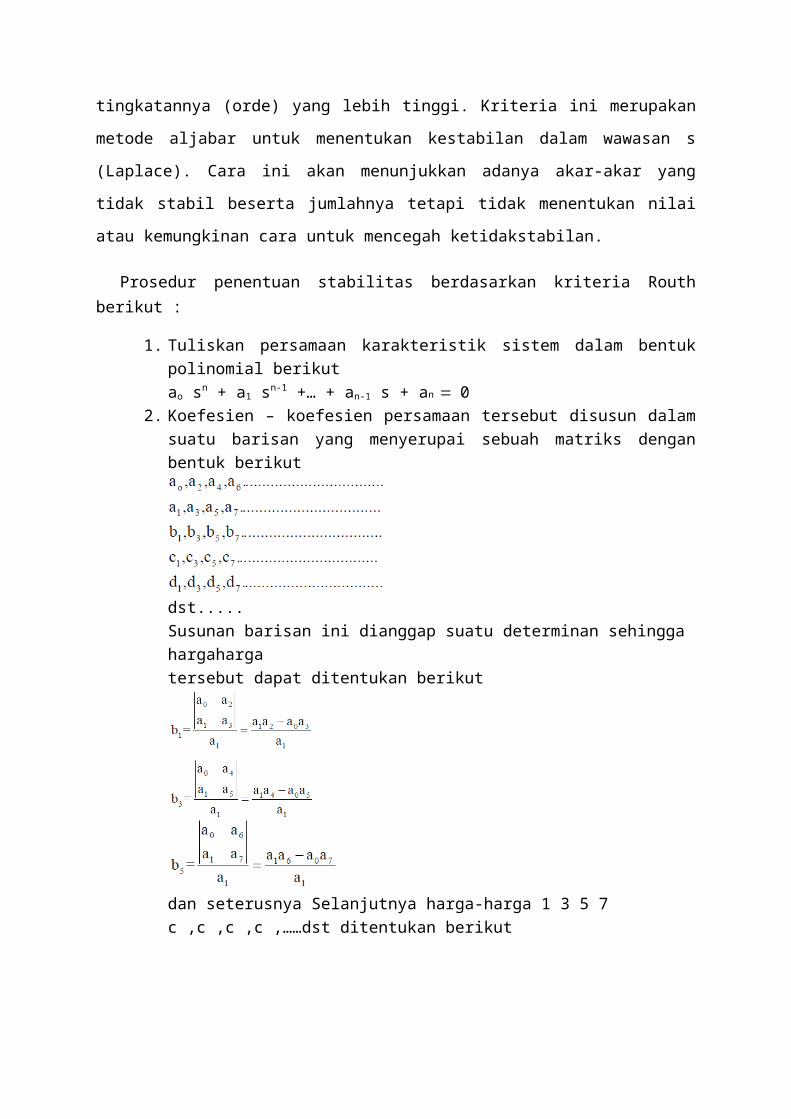
1. Tuliskan persamaan karakteristik sistem dalam bentukpolinomial berikutao sn + a1 sn-1 +… + an-1 s + an 0
2. Koefesien – koefesien persamaan tersebut disusun dalamsuatu barisan yang menyerupai sebuah matriks denganbentuk berikut
dst.....Susunan barisan ini dianggap suatu determinan sehingga hargahargatersebut dapat ditentukan berikut
dan seterusnya Selanjutnya harga-harga 1 3 5 7 c ,c ,c ,c ,……dst ditentukan berikut
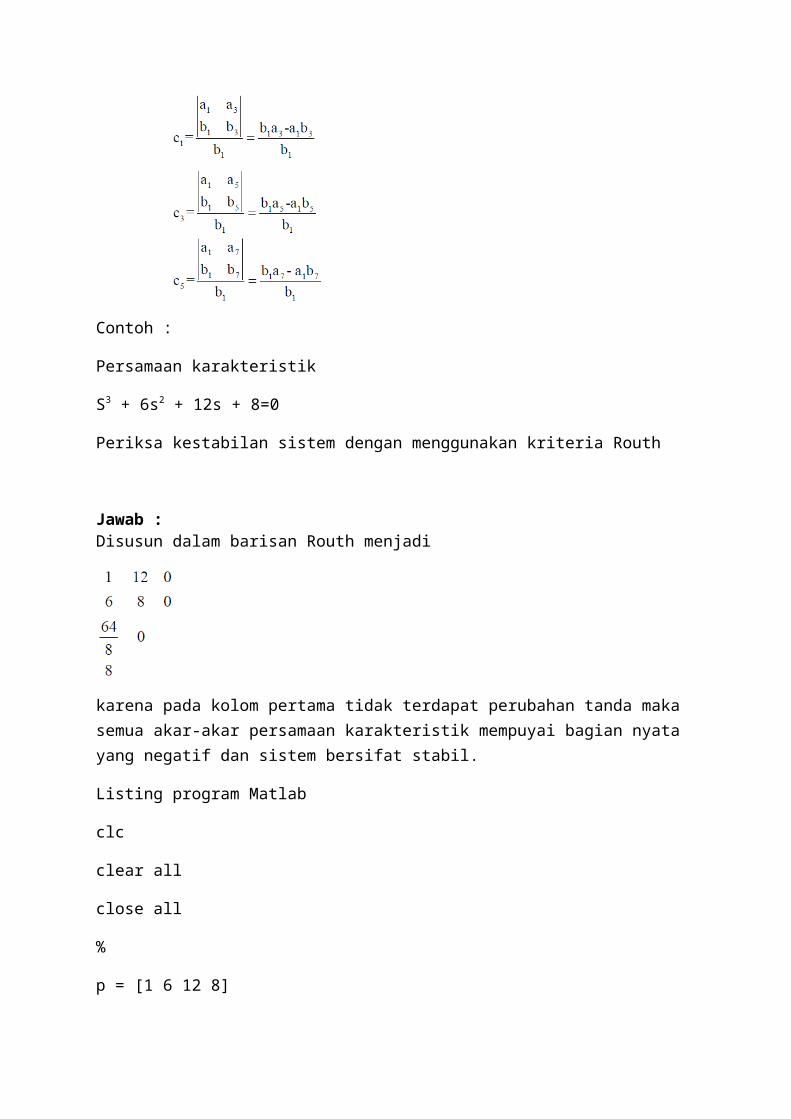
Contoh :
Persamaan karakteristik
S3 + 6s2 + 12s + 8=0
Periksa kestabilan sistem dengan menggunakan kriteria Routh
Jawab :Disusun dalam barisan Routh menjadi
karena pada kolom pertama tidak terdapat perubahan tanda maka semua akar-akar persamaan karakteristik mempuyai bagian nyata yang negatif dan sistem bersifat stabil.
Listing program Matlab
clc
clear all
close all
%
p = [1 6 12 8]
routh(p)
Hasil program
p =
1 6 12 8
Routh Array
1.0000e+000 1.2000e+001
6.0000e+000 8.0000e+000
1.0667e+001 0
8.0000e+000 0
System is stable
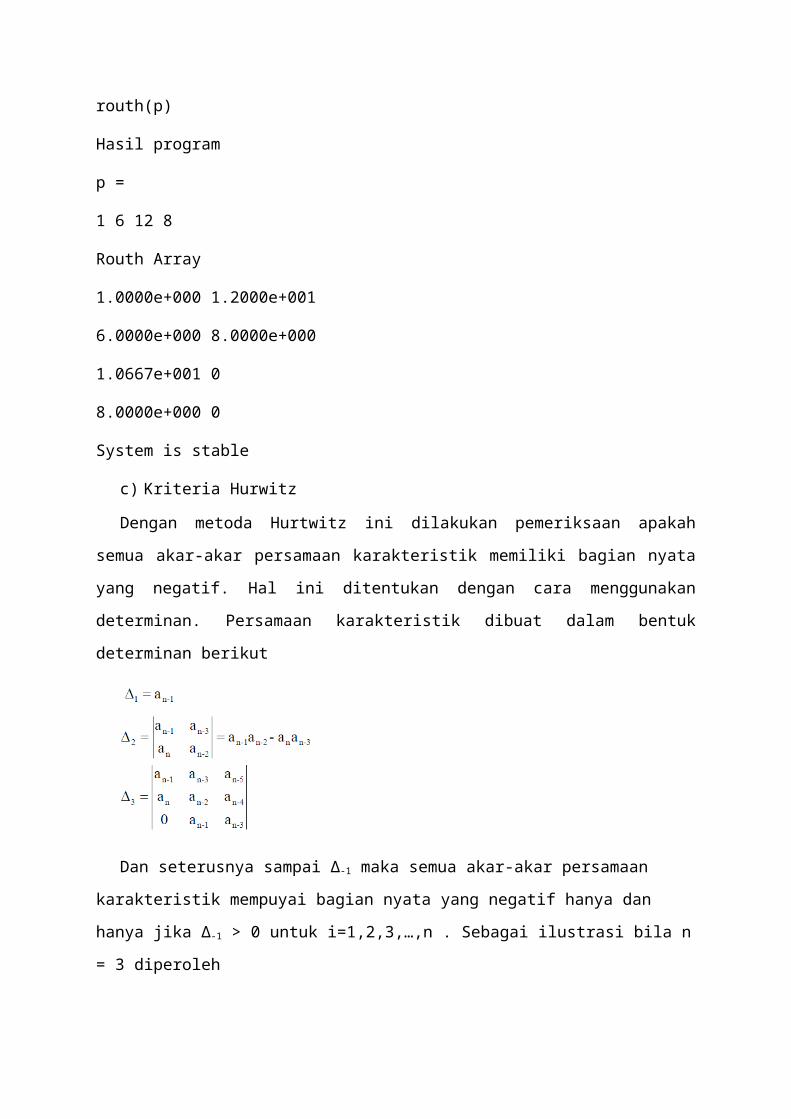
c) Kriteria Hurwitz
Dengan metoda Hurtwitz ini dilakukan pemeriksaan apakah
semua akar-akar persamaan karakteristik memiliki bagian nyata
yang negatif. Hal ini ditentukan dengan cara menggunakan
determinan. Persamaan karakteristik dibuat dalam bentuk
determinan berikut
Dan seterusnya sampai ∆-1 maka semua akar-akar persamaan
karakteristik mempuyai bagian nyata yang negatif hanya dan
hanya jika ∆-1 > 0 untuk i=1,2,3,…,n . Sebagai ilustrasi bila n
= 3 diperoleh
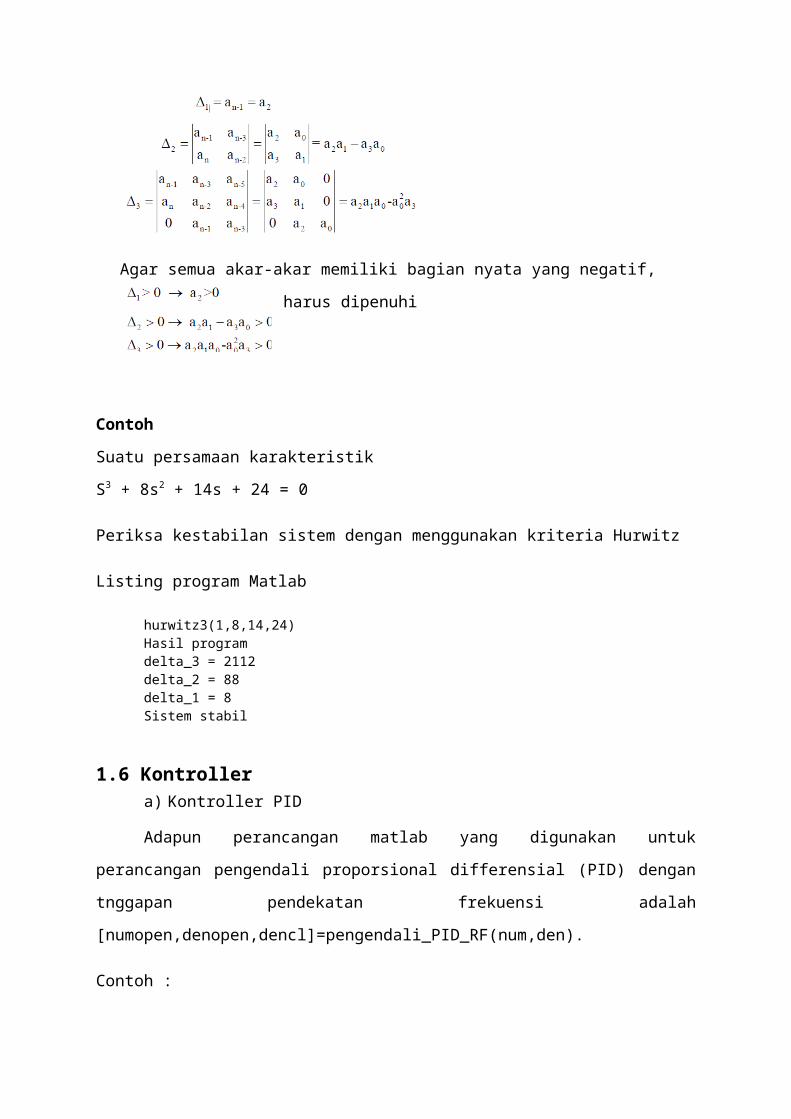
Agar semua akar-akar memiliki bagian nyata yang negatif,
harus dipenuhi
Contoh
Suatu persamaan karakteristik
S3 + 8s2 + 14s + 24 = 0
Periksa kestabilan sistem dengan menggunakan kriteria Hurwitz
Listing program Matlab
hurwitz3(1,8,14,24)Hasil programdelta_3 = 2112delta_2 = 88delta_1 = 8Sistem stabil
1.6 Kontrollera) Kontroller PID
Adapun perancangan matlab yang digunakan untuk
perancangan pengendali proporsional differensial (PID) dengan
tnggapan pendekatan frekuensi adalah
[numopen,denopen,dencl]=pengendali_PID_RF(num,den).
Contoh :
Untuk fungsi alih lingkar terbuka pada persamaan :
G (S)= 1.0000s (s+5.0000 )
Dengan Y sebagai keluaran dan (U) sebagai masukan, rangcang
pengendali untuk system dengan pendekatan frekuensi agar
diperoleh
Wkatu naik kurang dari 0.25 s
Wwaktu puncak kurang dari 0.5 s
Waktu keadaaan mantap kurang dari 1 s
Margin fasa 300 s/d 500
Lebar pita kurang dari 15rad/det
b) Kompensator (ketinggalan dan mendahului)
1. Kompensator mendahului
Fungsi matlab yang digunakan untuk perancangan
kompensator mendahului ((phase lead) dengan
pendektan tanggapan frekuensi adalah
[numopen,denopen,dencl]=kompensator_lead_RF(num,de
n)
2. Kompensator ketinggalan (phase lag)
Fungsi matlab yang digunakan untuk perancangan
kompensator ketinggalan (phase lag) dengan
pendektan tanggapan frekuensi adalah
[numopen,denopen,dencl]=kompensator_lag_RF(num,den
)
1.7 Metode tempat kedudukan akarAturan Umum Untuk Menggambarkan Tempat Kedudukan Akar :
1) Tentukanlah cari persamaan karakteristik system
1 + G(s)H(s) = 0
dan susun kembali perrsamaan ini sehingga parameter
yang diinginkan tampak sebagai faktor pengali dalam
bentuk
Pada pembahasan ini, dianggap bahwa parameter yang
ingin ditinjau adalah penguatan K dimana K > 0 . Dari
fungsi alih lingkar terbuka dalam bentuk perkalian
faktor-faktornya , letakkan pole dan zero lingkar
terbuka pada bidang s .
2) Carilah titik awal dan titik akhir dari tempat
kedudukan akar dan carilah juga banyaknya cabang tempat
kedudukan akar. Titik-titik pada tempat kedudukan untuk
K = 0 adalah pole-pole lingkar terbuka. Ini dapat
dilihat dari syarat sudut dengan memasukkan harga K
mendekati nol atau
Persamaan terakhir ini secara tidak langsung
menunjukkan bahwa harga s harus mendekati salah satu
pole lingkar terbuka. Setiap tempat kedudukan akar
dimulai dari suatu pole fungsi alih lingkar terbuka
G(s)H(s). Jika K diperbesar hingga mendekati tak
terhingga maka setiap tempat kedudukan akar akan menuju
ke suatu zero fungsi alih lingkar terbuka atau menuju
tak terhingga pada bidang kompleks. Ini dapat dilihat
sebagai berikut jika dimasukkan K mendekati tak
terhingga pada syarat besar maka
3) Tempat kedudukan akar pada sumbu nyata ditentukan oleh
pole dan zero lingkar terbuka yang terletak pada sumbu
nyata. Pole dan zero konjugasi kompleks fungsi alih
lingkar terbuka tidak berpengaruh pada letak tempat
kedudukan akar pada sumbu nyata karena kontribusi sudut
dari sepasang pole atau zero konjugasi kompleks pada
sumbu nyata adalah 0 360 . Setiap bagian tempat
kedudukan akar pada sumbu nyata mempuyai daerah dari
suatu pole atau zero ke pole atau zero lain.
4) Tentukan asimtot- asimtot tempat kedudukan akar. Jika
titik uji s terletak jauh dari titik asal maka sudut
setiap besaran kompleks dapat dianggap sama.
Selanjutnya satu zero lingkar terbuka dan satu pole
lingkar terbuka saling menghilangkan. Oleh karena itu,
tempat kedudukan akar untuk harga s yang sangat besar
harus menuju ke garis asimtot yang mempuyai sudut
(kemiringan) sebagai berikut
Sudut asimtot : ±180 ¿¿ k(0,1,2,3….)
Dimana :
n : Banyaknya pole terhingga dari G(s)H(s)
m : Banyaknya zero terhingga dari G(s)H(s)
Disini k = 0 merupakan asimtot dengan sudut terkecil
terhadap sumbu nyata. Walaupun k dapat mempuyai tak
terhingga harga, jika k membesar akan tetapi sudut
asimtot kemudian akan berulang sehingga banyaknya
asimtot yang berbeda adalah n - m.
5) Tentukan titik “breakaway” dan “break-in”. Jika
persamaan karakteristik dinyatakan olehAs+ KBs= 0
Maka titik “breakway” dan titik “break-in” dapat
ditentukan dari akar-akar
Dimana ini merupakan salah satu cara yang berdasarkan
pada diferensiasi terhadap s . Jika harga K yang
diperoleh dari akar 1 s = s yang memenuhi dKdS=0adalah
positif, maka titik 1 s = s adalah titik “breakway”
atau “break-in”tetapi jika harga K yang diperoleh dari
akar 1 s = s yang memenuhi dKdS
=0 adalah negatif maka
titik 1 s = s bukan merupakan titik “breakway” atau
“break-in”.
6) Untuk membuat sketsa tempat kedudukan akar dengan
ketelitian yang layak harus dicari arah tempat
kedudukan akar di dekat pole atau zero kompleks. Jika
dipilih suatu titik uji dan digerakkan di sekitar pole
kompleks (atau zero kompleks) maka jumlah konstribusi
sudut dari pole dan zero yang lain dapat dianggap tetap
sama. Oleh karena itu, sudut berangkat (atau sudut
datang) tempat kedudukan akar dari suatu pole kompleks
(atau pada suatu zero kompleks) dapat diperoleh dengan
mengurangi 0 180 dengan jumlah sudut semua besaran
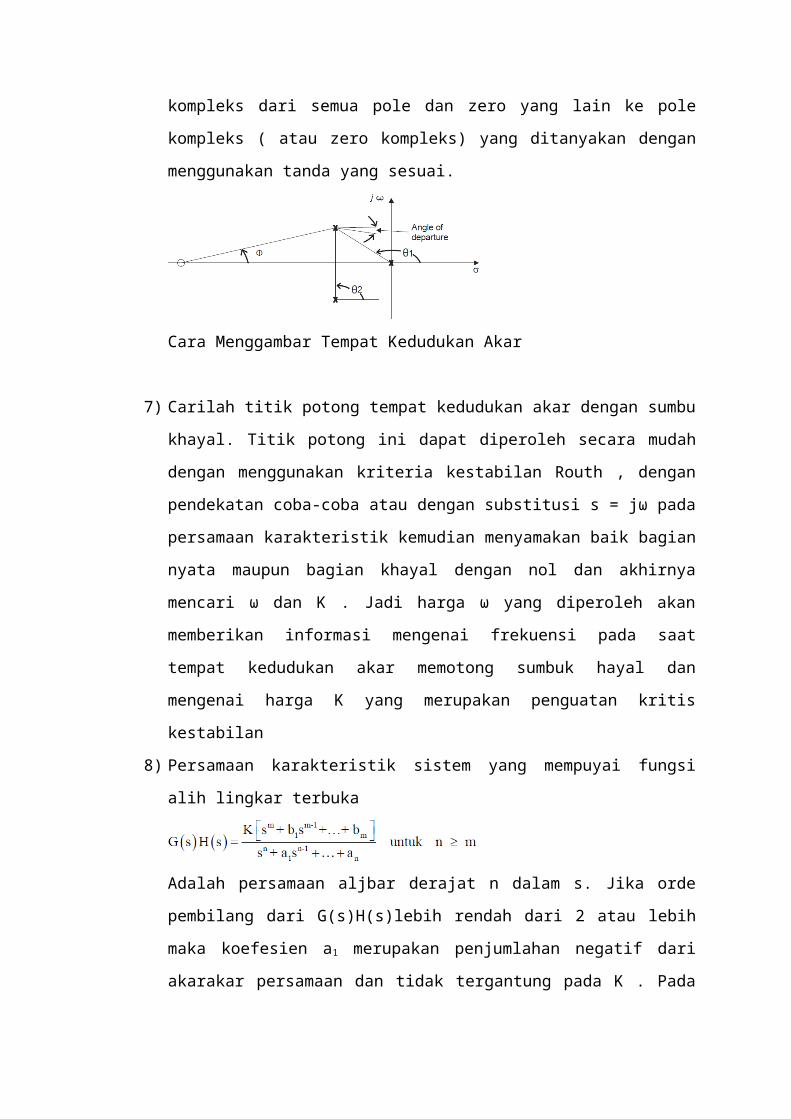
kompleks dari semua pole dan zero yang lain ke pole
kompleks ( atau zero kompleks) yang ditanyakan dengan
menggunakan tanda yang sesuai.
Cara Menggambar Tempat Kedudukan Akar
7) Carilah titik potong tempat kedudukan akar dengan sumbu
khayal. Titik potong ini dapat diperoleh secara mudah
dengan menggunakan kriteria kestabilan Routh , dengan
pendekatan coba-coba atau dengan substitusi s = jω pada
persamaan karakteristik kemudian menyamakan baik bagian
nyata maupun bagian khayal dengan nol dan akhirnya
mencari ω dan K . Jadi harga ω yang diperoleh akan
memberikan informasi mengenai frekuensi pada saat
tempat kedudukan akar memotong sumbuk hayal dan
mengenai harga K yang merupakan penguatan kritis
kestabilan
8) Persamaan karakteristik sistem yang mempuyai fungsi
alih lingkar terbuka
Adalah persamaan aljbar derajat n dalam s. Jika orde
pembilang dari G(s)H(s)lebih rendah dari 2 atau lebih
maka koefesien a1 merupakan penjumlahan negatif dari
akarakar persamaan dan tidak tergantung pada K . Pada
kasus ini, jika beberapa akar pada tempat kedudukan
bergerak ke arah kiri dengan membesarnya K maka akar-
akar yang lain harus bergerak ke arah kanan dengan
membesarnya K . Informasi ini berguna dalam mencari
bentuk umum tempat kedudukan akar.
9) Tentukan tempat kedudukan akar di dekat sumbu jω dan
titik asal. Bagian yang paling penting dari tempat
kedudukan akar tidak terletak pada sumbu nyata ataupun
asimtotnya tetapi terletak di dekat sumbu jω dan titik
asal. Bentuk tempat kedudukan akar yang terletak pada
daerah yang penting ini harus diperoleh dengan
ketelitian yang cukup baik .
1.8 Metode Tanggapan frekuensiTanggapan frekuensi adalah tanggapan keadaan mantap suatu
sistem terhadap suatu masukan sinusiodal. Frekuensi sinyal
masukan dalam suatu daerah frekuensi tertentu diubah dan
tanggapan frekuensi yang dihasilkan dipelajari. Metoda
tanggapan frekuensi dapat diterapkan pada sistem yang tidak
mempunyai fungsi rasional. Solusi daripada itu, sistem yang
tidak diketahui atau sistem yang benar-benar dikenal, dapat
ditangani dengan metoda tanggapan frekuensi sedemikian
sehingga pengaruh kebisingan yang tidak diinginkan dapat
diabaikan dan di analisis serta perancangan semacam ini dapat
diperluas ke sistem kendali non linear.
a. Diagram Bode
Fungsi alih sinusoidal dapat disajikan dalam dua diagram
yang terpisah, satu merupakan diagram besaran terhadap
frekuensi dan diagram sudut fasa dalam derajat terhadap
frekuensi. Diagram Bode terdiri dari dua grafik. Grafik
pertama merupakan diagram dari logaritma besaran fungsi
sinusoidal, dan grafik yang lain merupakan sudut fasa di mana
kedua grafik digambarkan terhadap frekuensi dalam skala
logaritmik.
Penyajian standar besaran logaritmik dari G(jω) adalah 20
log G(jω) dengan basis logaritma tersebut adalah 10. Satuan
yang digunakan dalam penyajian besaran adalah desibel (dB).
Pada penyajian logaritmik, kurva digambarkan pada kertas
semilog, dengan menggunakan skala log untuk frekuensi dan
skala linier untuk besaran (dalam dB) atau sudut fasa (dalam
derajat).
Contoh : Dengan menggunakan Matlab, tentukan diagram Bode
untuk fungsi alih pada persamaan (1) dan (2) berikut :
(1)
(2)
Jawab :
clcclear allclose all% Fungsi Alihdisp('Fungsi Alih')num_1 = 15;den_1 = conv([1 0],conv([1 3],[0 7 5]));sys_1 = tf(num_1,den_1)
%% Diagram Bodefigurebode(num_1,den_1);grid on%% Fungsi Alihdisp('Fungsi Alih')num_2 = [ 0 7 15 7 80];den_2 = [ 1 8 12 70 110];sys_2 = tf(num_2,den_2)%% Diagram Bodefigurebode(num_2,den_2);grid on
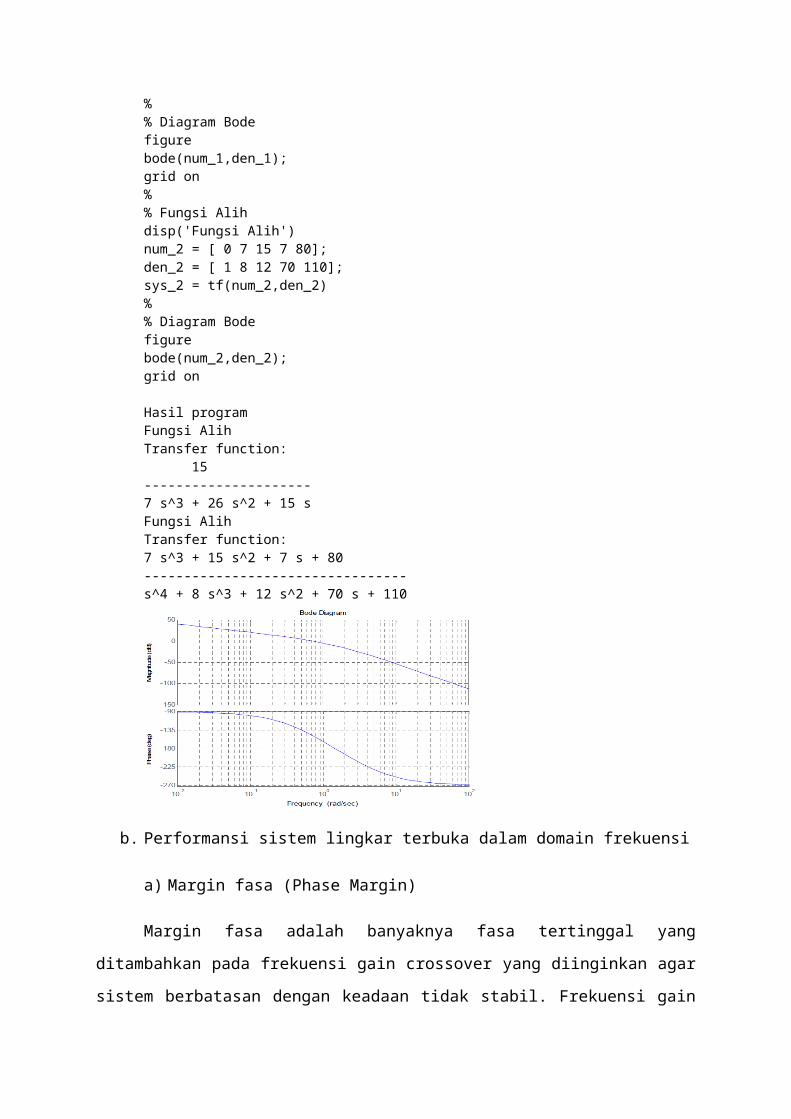
Hasil programFungsi AlihTransfer function:
15---------------------7 s^3 + 26 s^2 + 15 sFungsi AlihTransfer function:7 s^3 + 15 s^2 + 7 s + 80---------------------------------s^4 + 8 s^3 + 12 s^2 + 70 s + 110
b. Performansi sistem lingkar terbuka dalam domain frekuensi
a) Margin fasa (Phase Margin)
Margin fasa adalah banyaknya fasa tertinggal yang
ditambahkan pada frekuensi gain crossover yang diinginkan agar
sistem berbatasan dengan keadaan tidak stabil. Frekuensi gain
crossover adalah frekuensi di mana G( jω) =1. Margin fasa γ
adalah 0 180 ditambah sudut fasa φ dari fungsi alih lingkar
terbuka pada frekuensi gain crossover atau 0 γ = 180 +φ . Pada
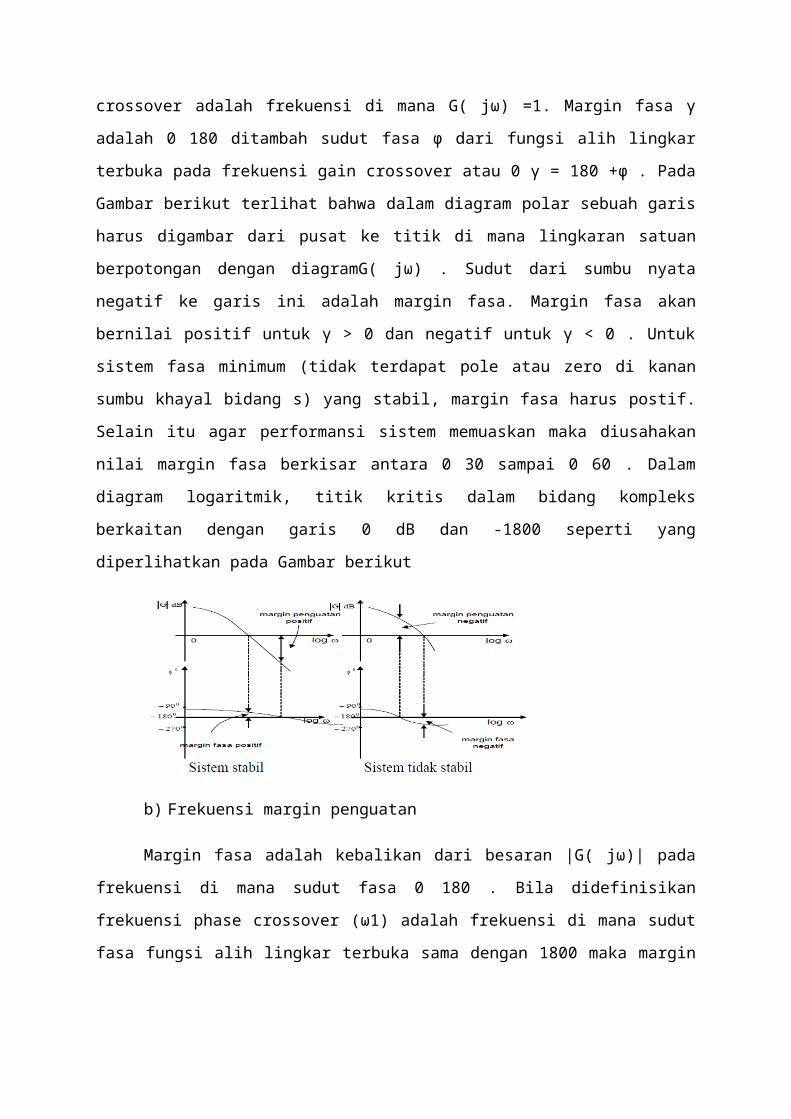
Gambar berikut terlihat bahwa dalam diagram polar sebuah garis
harus digambar dari pusat ke titik di mana lingkaran satuan
berpotongan dengan diagramG( jω) . Sudut dari sumbu nyata
negatif ke garis ini adalah margin fasa. Margin fasa akan
bernilai positif untuk γ > 0 dan negatif untuk γ < 0 . Untuk
sistem fasa minimum (tidak terdapat pole atau zero di kanan
sumbu khayal bidang s) yang stabil, margin fasa harus postif.
Selain itu agar performansi sistem memuaskan maka diusahakan
nilai margin fasa berkisar antara 0 30 sampai 0 60 . Dalam
diagram logaritmik, titik kritis dalam bidang kompleks
berkaitan dengan garis 0 dB dan -1800 seperti yang
diperlihatkan pada Gambar berikut
b) Frekuensi margin penguatan
Margin fasa adalah kebalikan dari besaran |G( jω)| pada
frekuensi di mana sudut fasa 0 180 . Bila didefinisikan
frekuensi phase crossover (ω1) adalah frekuensi di mana sudut
fasa fungsi alih lingkar terbuka sama dengan 1800 maka margin
penguatan g K dinyatakan oleh persamaan berikut : Margin
penguatan / gain margin
Dalam bentuk decibel (dB) dinyatakan dalam persamaan
berikut :
Margin penguatan yang diekspresikan dalam decibel (dB),
positif jika Kg > 1 dan negatif jika Kg < 1. Jadi suatu margin
fasa positif (dalam desibel) berarti sistem stabil dan margin
fasa negatif (dalam desibel) berarti sistem tidak stabil.
Contoh : Dengan menggunakan Matlab, tentukan performansi
sistem lingkar terbuka dalam domain frekuensi pada
persamaan berikut:
Kode Matlab untuk penyelesaian soal
% Contoh 7.% Fungsi Alih Lingkar Terbukadisp('Fungsi Alih Lingkar Terbuka')num = 15;den = conv([1 0],conv([1 3],[7 5]));G = tf(num,den)%% Performansi Sistem Lingkar Terbuka Dalam DomainFrekuensidisp('Performansi Sistem Lingkar Terbuka Dalam DomainFrekuensi')y = allmargin(G)hasil programFungsi Alih Lingkar TerbukaTransfer function:15---------------------
7 s^3 + 26 s^2 + 15 sPerformansi Sistem Lingkar Terbuka Dalam DomainFrekuensiy =GainMargin: 3.7143GMFrequency: 1.4639PhaseMargin: 32.6165PMFrequency: 0.6971DelayMargin: 0.8166DMFrequency: 0.6971Stable: 1
c. Performansi sistem lingkar tertutup dalam domain
frekuensi
a) Lebar pita / bandwith
Lebar pita (bandwidth) adalah frekuensi saat tanggapan
magnituda sistem lingkar tertutup sama dengan -3 dB. Lebar
pita (bandwidth) ini menunjukkan sifat dari tanggapan
peralihan yang berkaitan dengan kecepatan waktu naik.
b) Magnitude puncak maksimum
Magnitude Maksimum ( ) p M menunjukkan sifat dari
tanggapan peralihan yang berkaitan dengan redaman sistem dan
lewatan maksimum. Untuk system orde kedua hubungan antara
rasio magnitude maksimum dengan redaman dinyatakan pada
persamaan berikut
Untuk sistem orde dua nilai magnitude maksimum ini
bernilai antara 1.0000 dan 1.5000 agar sistem bersifat stabil.
c) Frekuensi puncak maksimum
Untuk sistem orde kedua, frekuensi puncak maksimum
dinyatakan pada persamaan berikut
Frekuensi puncak maksimum ini berkaitan dengan kecepatan
tanggapan peralihan.
Contoh : Dengan menggunakan Matlab, tentukan lebar pita
(bandwidth) dan Rasio Magnitude Maksimum (Mp ) dari fungsi alih
sistem lingkar tertutup pada persamaan berikut
Jawab Kode Matlab untuk penyelesaian soal contoh adalah
clc
clear all
close all
% Fungsi Alih Lingkar Tertutup
disp('Fungsi Alih Lingkar Tertutup')
num = [ 0 0 5];
den = [ 1 2 5];
G = tf(num,den);
% Performansi Sistem Lingkar Tertutup Dalam Domain
Frekuensi
disp('Performansi Sistem Lingkar Tertutup Dalam Domain
Frekuensi')
[mag,pha] = bode(num,den);
Mp = max(mag)
BW = bandwidth(G)
Hasil program

Fungsi Alih Lingkar Tertutup
Transfer function:
5
-------------
s^2 + 2 s + 5
Performansi Sistem Lingkar Tertutup Dalam Domain
Frekuensi
Mp = 1.2500
BW = 2.9699
BAB II
PEMBAHASAN
2.1 Deskripsi sistem a) Fungsi alih lingkar terbuka
Fungsi alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
seriPorgram matlab
numG= [2]denG= [1 14 24]numH= [1 5]denH= [1 25]disp('Sistem Alih Lingkar Terbuka')[num,den]=series(numG,denG,numH,denH)printsys(num,den)
hasil :
numG = 2denG = 1 14 24numH = 1 5denH = 1 25Sistem Alih Lingkar Terbukanum = 0 0 2 10den = 1 39 374 600 num/den = 2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600
parallel
program matlab
numG= [2]denG= [1 14 24]numH= [1 5]denH= [1 25]disp('Sistem Alih Lingkar Terbuka')[num,den]=parallel(numG,denG,numH,denH)printsys(num,den)
hasil :
numG =
2
denG =
1 14 24
numH =
1 5
denH =
1 25
Sistem Alih Lingkar Terbuka
num =
1 19 96 170
den =
1 39 374 600
num/den =
s^3 + 19 s^2 + 96 s + 170
--------------------------
s^3 + 39 s^2 + 374 s + 600
b) Fungsi alih lingkar tertutup Fungsi alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
Program matlab
numG= [2]denG= [1 14 24]numH= [1 5]denH= [1 25]disp('Sistem Alih Lingkar Tertutup')[num,den]=feedback(numG,denG,numH,denH,-1)%printsys(num,den)
hasil program :numG = 2denG = 1 14 24numH = 1 5denH = 1 25Sistem Alih Lingkar Tertutupnum =
0 0 2 50den = 1 39 376 610 num/den = 2 s + 50 -------------------------- s^3 + 39 s^2 + 376 s + 610
c) Fungsi alih antara kesalahan terhadap masukan Fungsi alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
Program matlab
syms sG= (2)/(s^2 + 16*s + 24)H= (s+5)/(s+25)E=(1)/(1+G*H)printsys(num,den);
hasil programG = 2/(s^2 + 16*s + 24) H = (s + 5)/(s + 25) E = 1/((2*(s + 5))/((s + 25)*(s^2 + 16*s + 24)) + 1) num/den = 2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600
2.2 Performansi system lingkar terbuka dalam domain waktu tanpa pengendali
a) Tipe sistem
Fungsi alih
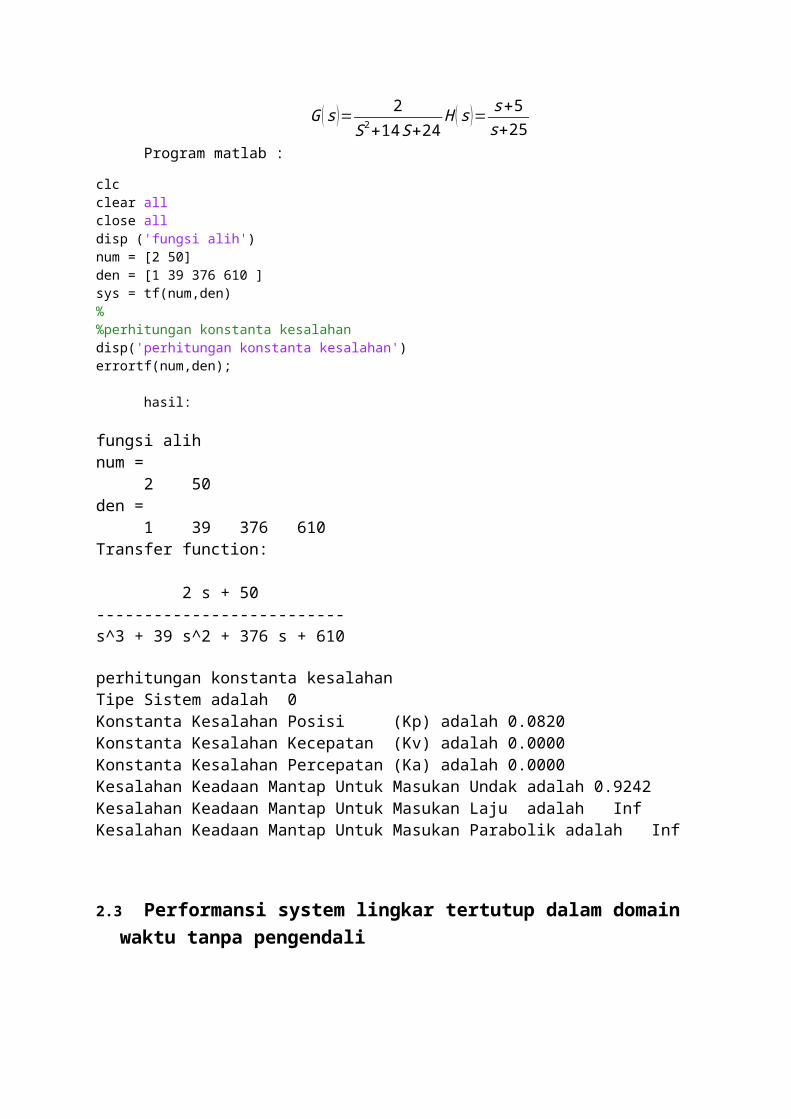
G (s)= 2S2+14S+24
H (s)= s+5s+25
Program matlab :
clcclear allclose alldisp ('fungsi alih')num = [2 50]den = [1 39 376 610 ]sys = tf(num,den)%%perhitungan konstanta kesalahandisp('perhitungan konstanta kesalahan')errortf(num,den);
hasil:
fungsi alihnum = 2 50den = 1 39 376 610 Transfer function:
2 s + 50--------------------------s^3 + 39 s^2 + 376 s + 610 perhitungan konstanta kesalahanTipe Sistem adalah 0 Konstanta Kesalahan Posisi (Kp) adalah 0.0820 Konstanta Kesalahan Kecepatan (Kv) adalah 0.0000 Konstanta Kesalahan Percepatan (Ka) adalah 0.0000 Kesalahan Keadaan Mantap Untuk Masukan Undak adalah 0.9242 Kesalahan Keadaan Mantap Untuk Masukan Laju adalah Inf Kesalahan Keadaan Mantap Untuk Masukan Parabolik adalah Inf
2.3 Performansi system lingkar tertutup dalam domain waktu tanpa pengendali
a) Plot grafik tanggapan peralihan sistem terhadap masukan impulsa satuan
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar tertutup
2 s + 50 -------------------------- s^3 + 39 s^2 + 376 s + 610
program matlab
clcclear allclose all%fungsi alih lingkar tertutupdisp ('fungsi alih lingkar tertutup')num = [2 50];den = [1 39 376 610];sys = tf(num,den)disp ('pole - zero - gain')[r,p,k] = residue(num,den)disp('performansi sistem dalam domain waktu')y = stepinfo(tf(num,den))%tanggapan sistem terhadap masukan impulseimpulse (sys)grid ontitle ('tanggapan terhadap masukan impulse')
hasil program :
fungsi alih lingkar tertutup
Transfer function:
2 s + 50
--------------------------
s^3 + 39 s^2 + 376 s + 610
pole - zero - gain
r =
0.0009
-0.2005
0.1995
p =
-24.8649
-12.1091
-2.0260
k =
[]
performansi sistem dalam domain waktu
y =
RiseTime: 1.1111
SettlingTime: 2.0217
SettlingMin: 0.0738
SettlingMax: 0.0819
Overshoot: 0
Undershoot: 0
Peak: 0.0819
PeakTime: 3.6609
grafik
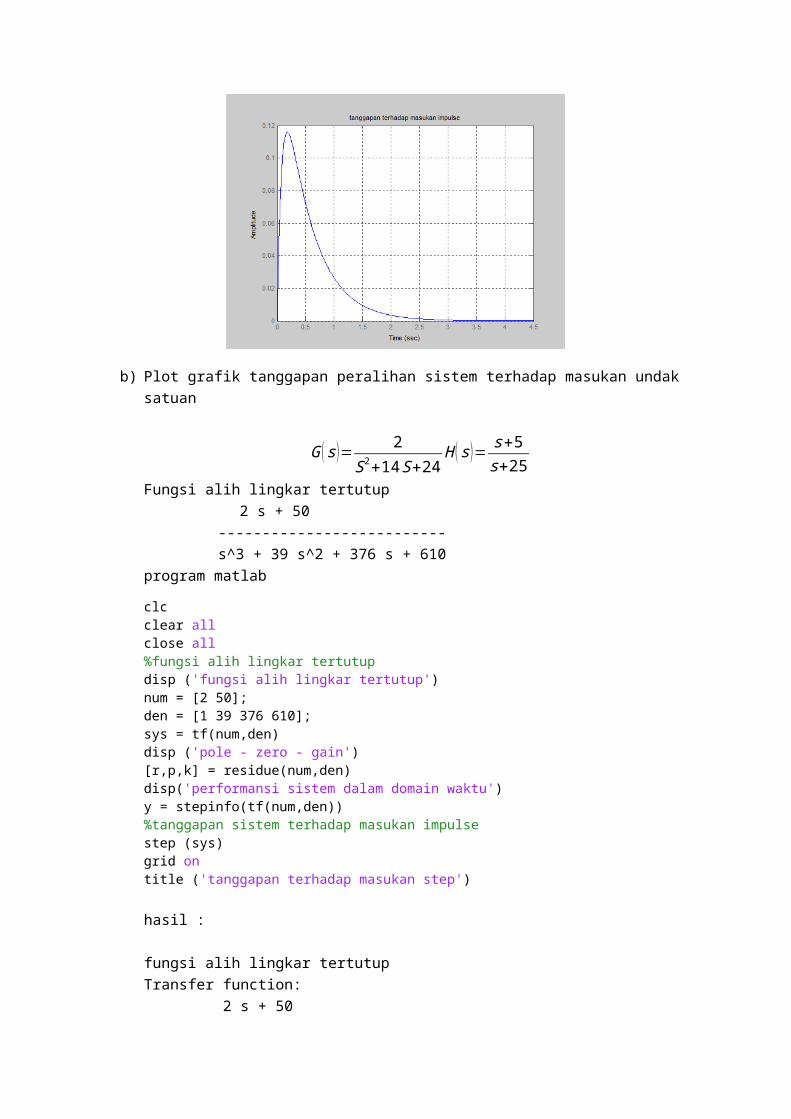
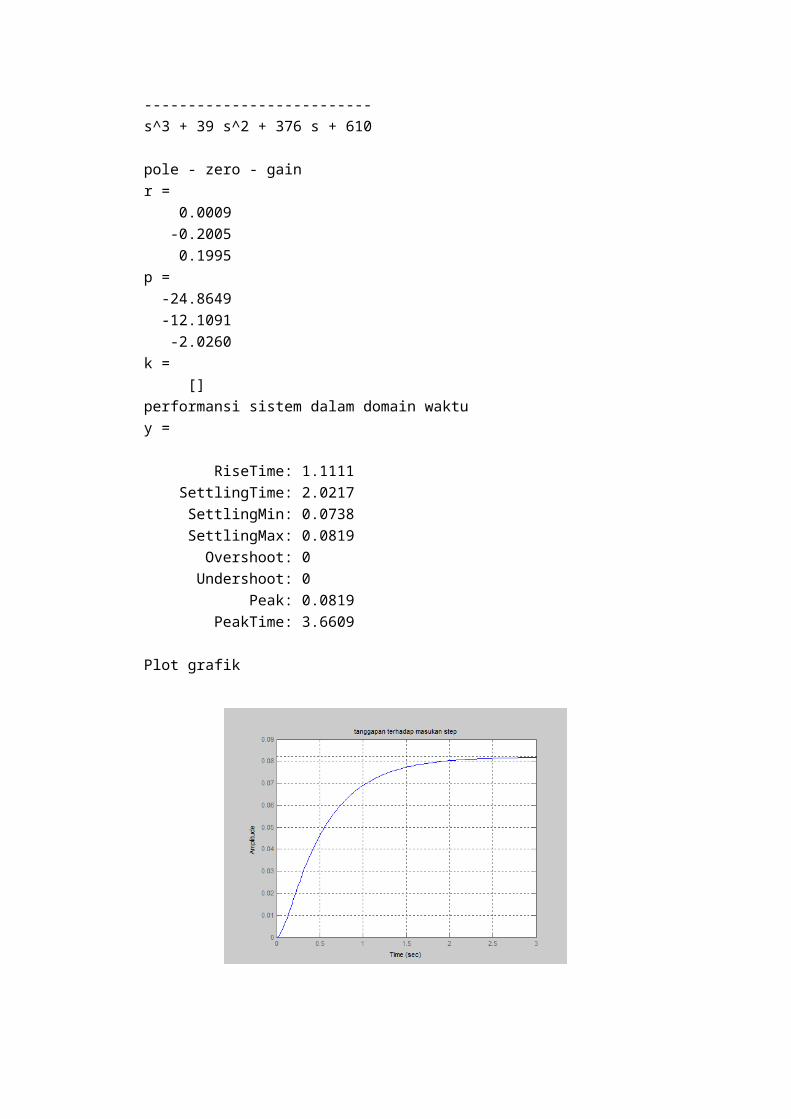
b) Plot grafik tanggapan peralihan sistem terhadap masukan undak satuan
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar tertutup 2 s + 50
-------------------------- s^3 + 39 s^2 + 376 s + 610
program matlab
clcclear allclose all%fungsi alih lingkar tertutupdisp ('fungsi alih lingkar tertutup')num = [2 50];den = [1 39 376 610];sys = tf(num,den)disp ('pole - zero - gain')[r,p,k] = residue(num,den)disp('performansi sistem dalam domain waktu')y = stepinfo(tf(num,den))%tanggapan sistem terhadap masukan impulsestep (sys)grid ontitle ('tanggapan terhadap masukan step')
hasil :
fungsi alih lingkar tertutup Transfer function: 2 s + 50
--------------------------s^3 + 39 s^2 + 376 s + 610 pole - zero - gainr = 0.0009 -0.2005 0.1995p = -24.8649 -12.1091 -2.0260k = []performansi sistem dalam domain waktuy =
RiseTime: 1.1111 SettlingTime: 2.0217 SettlingMin: 0.0738 SettlingMax: 0.0819 Overshoot: 0 Undershoot: 0 Peak: 0.0819 PeakTime: 3.6609
Plot grafik
c) Plot grafik tanggapan peralihan sistem terhadap masukan ramp satuan
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar tertutup 2 s + 50
-------------------------- s^3 + 39 s^2 + 376 s + 610
program matlab
clcclear allclose all%fungsi alih lingkar tertutupdisp ('fungsi alih lingkar tertutup')num = [2 50];den = [1 39 376 610 0];sys = tf(num,den)disp ('pole - zero - gain')[r,p,k] = residue(num,den)disp('performansi sistem dalam domain waktu')y = stepinfo(tf(num,den))%tanggapan sistem terhadap masukan impulsestep(sys)grid ontitle ('tanggapan terhadap masukan ramp')
hasil :
fungsi alih lingkar tertutup Transfer function: 2 s + 50------------------------------s^4 + 39 s^3 + 376 s^2 + 610 s pole - zero - gainr = -0.0000 0.0166 -0.0985 0.0820p = -24.8649
-12.1091 -2.0260 0k = []performansi sistem dalam domain waktuy =
RiseTime: NaN SettlingTime: NaN SettlingMin: NaN SettlingMax: NaN Overshoot: NaN Undershoot: NaN Peak: Inf PeakTime: InfPlot grafik
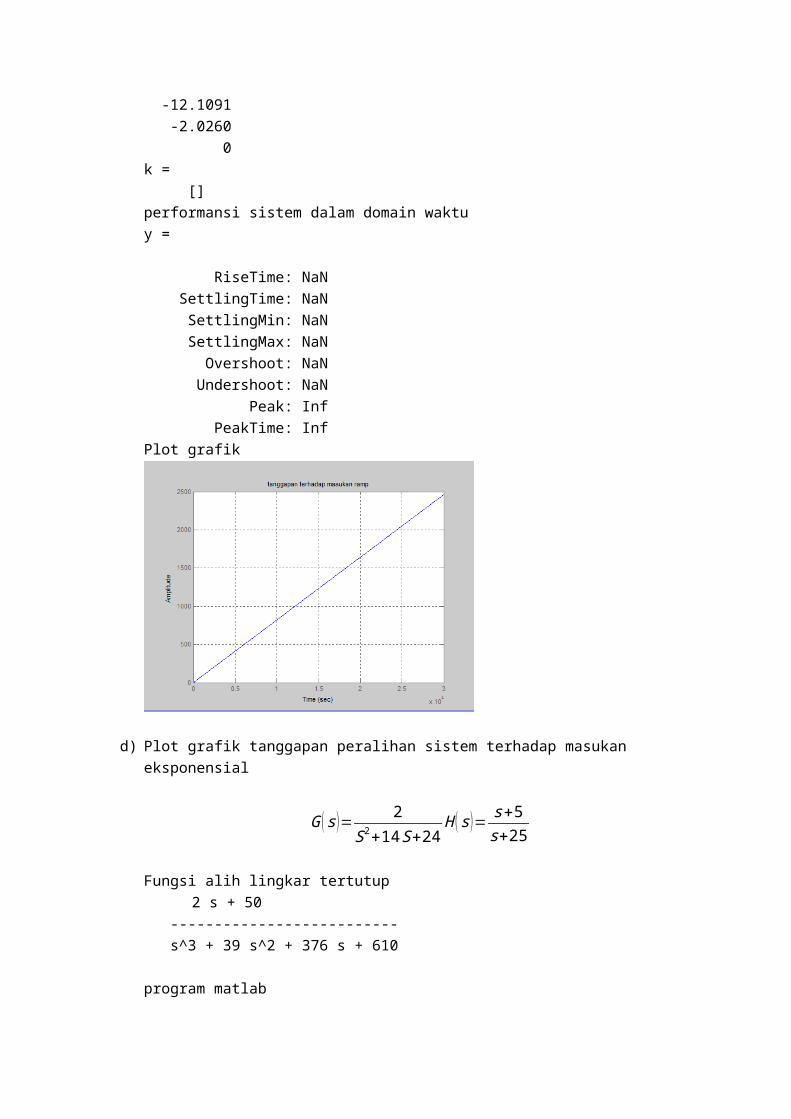
d) Plot grafik tanggapan peralihan sistem terhadap masukan eksponensial
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar tertutup 2 s + 50
-------------------------- s^3 + 39 s^2 + 376 s + 610
program matlab
disp('fungsi alih lingkar tertutup');num = [2 50];den = [1 39 376 610];sys = tf(num,den)disp('dalam domain waktu');y = stepinfo(tf(num,den))t = 0:0.1:10;e = exp (-7*t-8);y = lsim(num,den,e,t);plot(t,y,'k-')grid ontitle('tanggapan terhadap masukan eksponensial')xlabel('detik')ylabel('keluaran')
hasil :fungsi alih lingkar tertutup Transfer function: 2 s + 50--------------------------s^3 + 39 s^2 + 376 s + 610 dalam domain waktuy =
RiseTime: 1.1111 SettlingTime: 2.0217 SettlingMin: 0.0738 SettlingMax: 0.0819 Overshoot: 0 Undershoot: 0 Peak: 0.0819 PeakTime: 3.6609
grafik
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10-6 tanggapan terhadap m asukan eksponensial
detik
kelua
ran
2.4 Performansi System Lingkar Terbuka dalam Domain Frekuensi tanpa Pengendali Fungsi Alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar terbuka 2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600program matlab :
clcnum=[2 10]den=[1 39 374 600]disp('fungsi alih lingkar terbuka');sys=tf(num,den)bode(sys)disp('performasi sistem lingkar terbuka dalam domain frekuensi')y=allmargin(sys)
hasil :num = 2 10den = 1 39 374 600
fungsi alih lingkar terbuka Transfer function: 2 s + 10
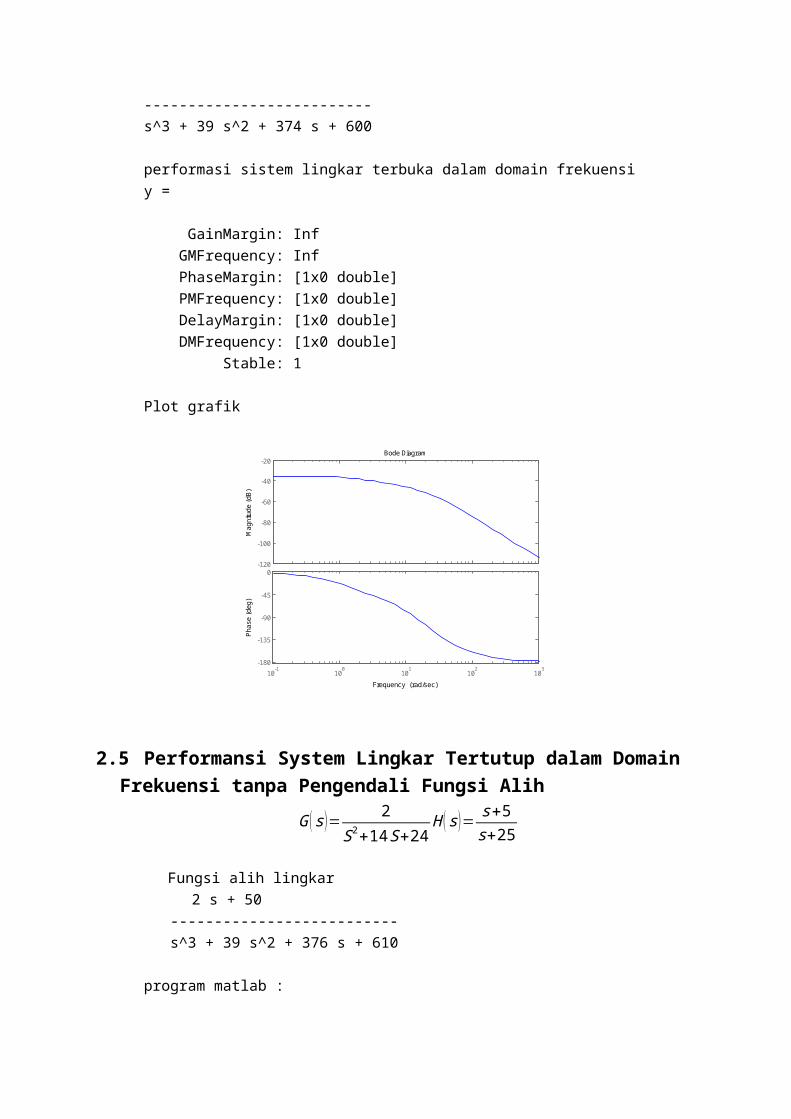
--------------------------s^3 + 39 s^2 + 374 s + 600 performasi sistem lingkar terbuka dalam domain frekuensiy =
GainMargin: Inf GMFrequency: Inf PhaseMargin: [1x0 double] PMFrequency: [1x0 double] DelayMargin: [1x0 double] DMFrequency: [1x0 double] Stable: 1
Plot grafik
-120
-100
-80
-60
-40
-20
Magnitude (dB)
10-1 100 101 102 103-180
-135
-90
-45
0
Phase (deg)
Bode Diagram
Frequency (rad/sec)
2.5 Performansi System Lingkar Tertutup dalam Domain Frekuensi tanpa Pengendali Fungsi Alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
Fungsi alih lingkar 2 s + 50
-------------------------- s^3 + 39 s^2 + 376 s + 610
program matlab :
disp('fungsi alih lingkar terbuka');num=[2 50]den=[1 39 376 610]sys=tf(num,den)w = 0 : 0.1 :100;[M,ph]= bode(num,den,w);Frqspec(w,M)
fungsi alih lingkar terbuka
num = 2 50den = 1 39 376 610 Transfer function: 2 s + 50--------------------------s^3 + 39 s^2 + 376 s + 610 Bandwidth = 1.95
2.6 Performansi kestabilan sistem tanpa pengendali Fungsi alih
G (s)= 2S2+14S+24
H (s)= s+5s+25
a. Persamaan karakteristik
Program matlab
clcclear allcloaktse all%persamaan karakteristikdisp('persamaan karakteristik')p = [1 39 376 610];%%akar-akar persamaan karakteristikdisp('akar-akar persamaan karakteristik')K = roots(p);
Hasil :>> p = [1 39 376 610]p =
1 39 376 610>> k= roots(p)k =
-24.8649 -12.1091 -2.0260Dari hasil akar-akrnya maka sisttem dalam keadaan stabil
b. Kriteria routhPersamaan karakteristik
S3+39S2376S+610Program matlab
clcclear allclose alldisp('persamaan karakteristik')p = [1 39 376 610]%periksa kestabilan dengan kriteria routhdisp('%periksa kestabilan dengan kriteria routh')routh(p)
hasil program : persamaan karakteristikp =
1 39 376 610
%periksa kestabilan dengan kriteria routh Routh-Hurwitz Array 1.0000e+000 3.7600e+002 3.9000e+001 6.1000e+002 3.6036e+002 0 6.1000e+002 0System is stable
c. Kriteria HurtwithPersamaan karakteristik
S3+39S2376S+610
Program matlab
clcclear allclose alldisp('persamaan karakteristik')p = [1 39 376 610]%periksa kestabilan dengan kriteria hurwitzdisp('%periksa kestabilan dengan kriteria hurwitz')hurwitz(p)
hasil :persamaan karakteristikp = 1 39 376 610%periksa kestabilan dengan kriteria hurwitz 39 14054 8572940System is stable
2.7 Diagram tempat Kedudukan Akar tanpa Pengendali Fungsi alih
2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600
program :
disp('Fungsi Alih')num= [2 10]den= [2 39 374 600]sys = tf(num,den)%diagram tempat kedudukan akarrlocus(num,den)v = [ -4 2 -4 4];axis (v)grid on
hasil program :num = 2 10den = 2 39 374 600 Transfer function:
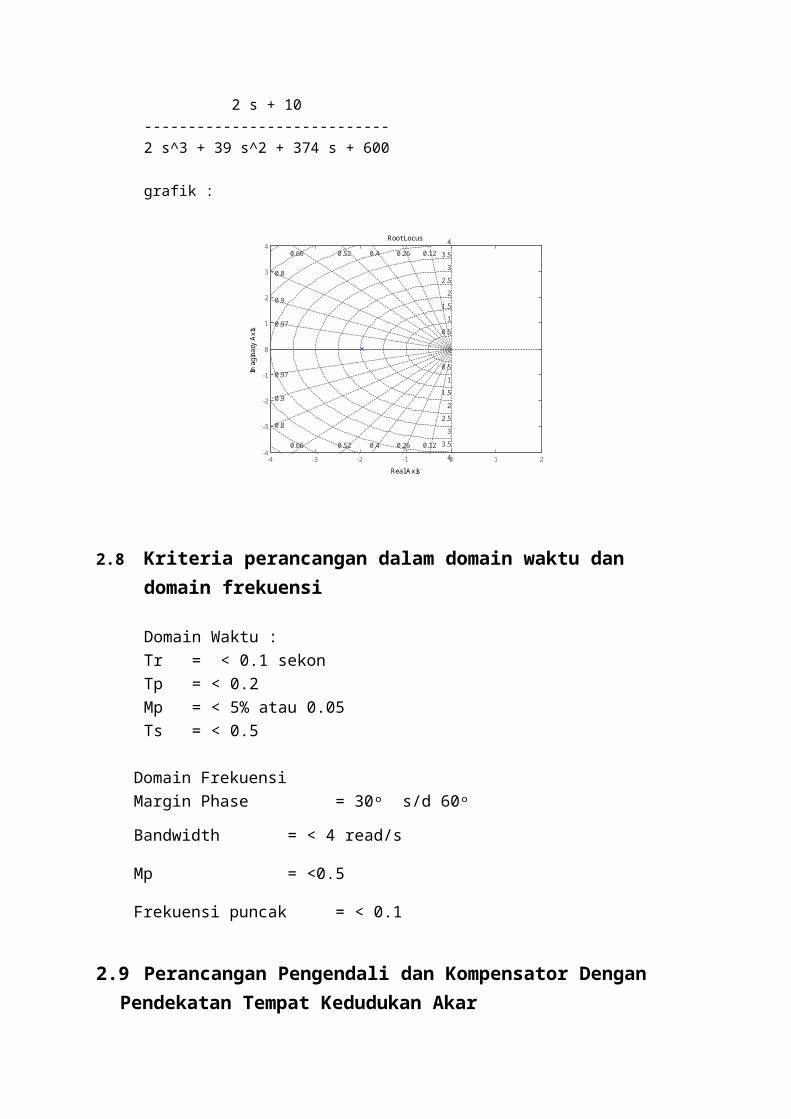
2 s + 10----------------------------2 s^3 + 39 s^2 + 374 s + 600
grafik :
-4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
40.120.260.40.520.66
0.8
0.9
0.97
0.120.260.40.520.66
0.8
0.9
0.97
0.51
1.52
2.53
3.54
0.51
1.52
2.53
3.54
Root Locus
Real Axis
Imagina
ry Axis
2.8 Kriteria perancangan dalam domain waktu dan domain frekuensi Domain Waktu :Tr = < 0.1 sekonTp = < 0.2Mp = < 5% atau 0.05Ts = < 0.5
Domain FrekuensiMargin Phase = 30ᵒ s/d 60ᵒ
Bandwidth = < 4 read/s
Mp = <0.5
Frekuensi puncak = < 0.1
2.9 Perancangan Pengendali dan Kompensator Dengan Pendekatan Tempat Kedudukan Akar
a. Proporsional (P)
Fungsi alih 2 s + 10
-------------------------- s^3 + 39 s^2 + 374 s + 600
program matlab :
% Pendekatan Tempat Kedudukan Akar num = [2 10]; den = [1 39 374 600];zeta = 0.34;
% Sistem Sebelum Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional ')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Sebelum Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Sebelum Pemasangan Pengendali Proporsional ')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsionaldisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional')damp(GH_cl)%% Perancangan Pengendali Proporsional [numopen,denopen,dencl]=PengP(num,den,zeta);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional
disp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional ')y2 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsionaldisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional')damp(T)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan PengendaliProporsionalfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional figuresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional')subplot(212)t1 = 0:0.0001:5; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional') %% Tempat Kedudukan Akar Sebelum dan Sesudah Pemasangan Pengendali Proporsionalfiguresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')
grid on subplot(212)rlocus(numopen,denopen)title('Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
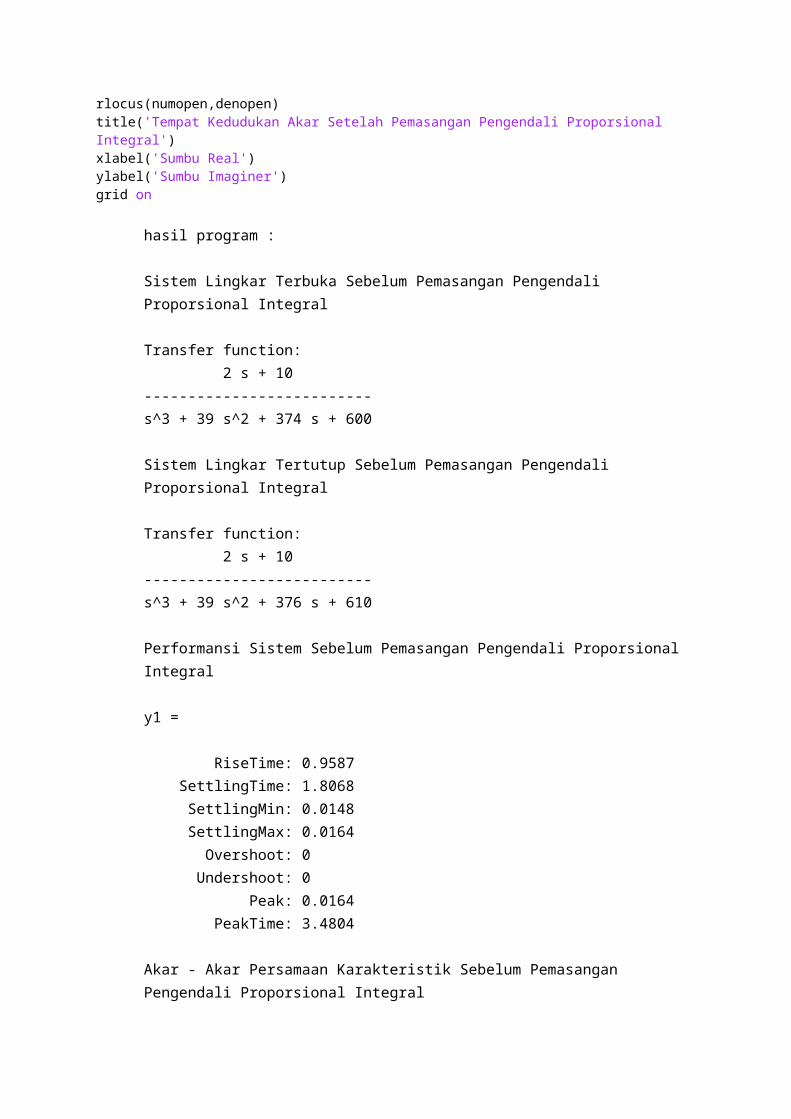
hasil program :Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Sebelum Pemasangan Pengendali Proporsional y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001
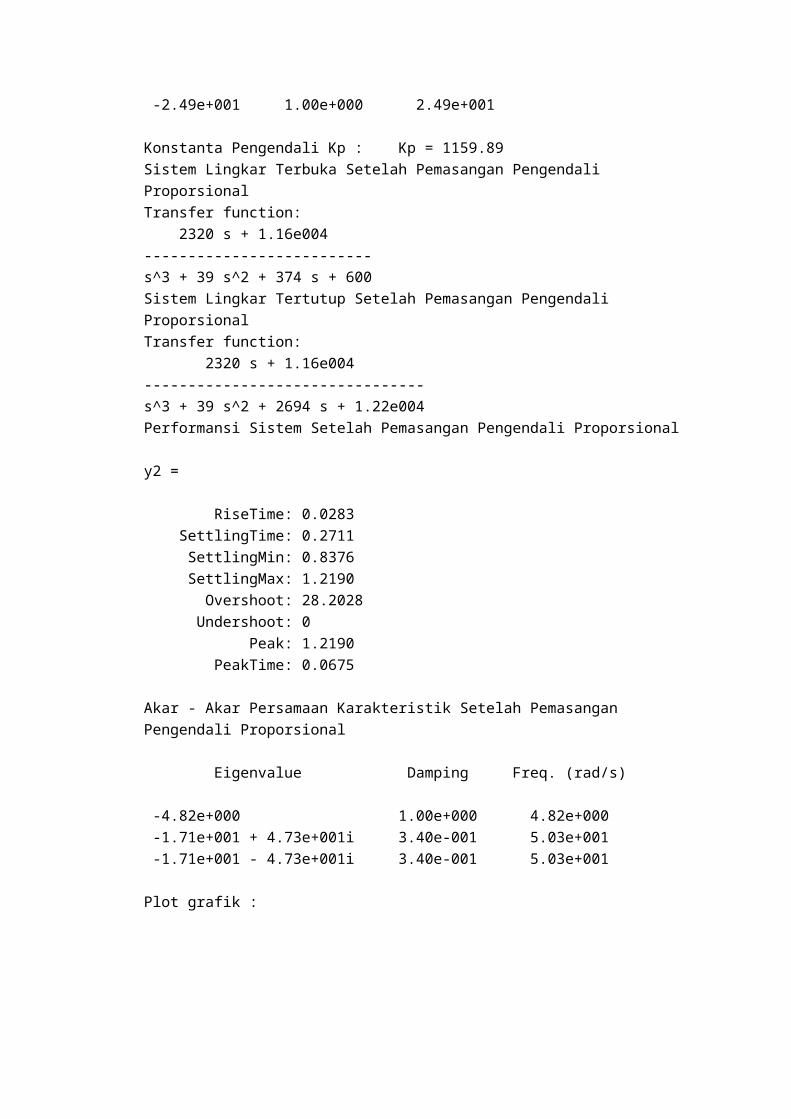
-2.49e+001 1.00e+000 2.49e+001 Konstanta Pengendali Kp : Kp = 1159.89Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Transfer function: 2320 s + 1.16e004--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Transfer function: 2320 s + 1.16e004--------------------------------s^3 + 39 s^2 + 2694 s + 1.22e004 Performansi Sistem Setelah Pemasangan Pengendali Proporsional
y2 =
RiseTime: 0.0283 SettlingTime: 0.2711 SettlingMin: 0.8376 SettlingMax: 1.2190 Overshoot: 28.2028 Undershoot: 0 Peak: 1.2190 PeakTime: 0.0675
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Eigenvalue Damping Freq. (rad/s) -4.82e+000 1.00e+000 4.82e+000 -1.71e+001 + 4.73e+001i 3.40e-001 5.03e+001 -1.71e+001 - 4.73e+001i 3.40e-001 5.03e+001
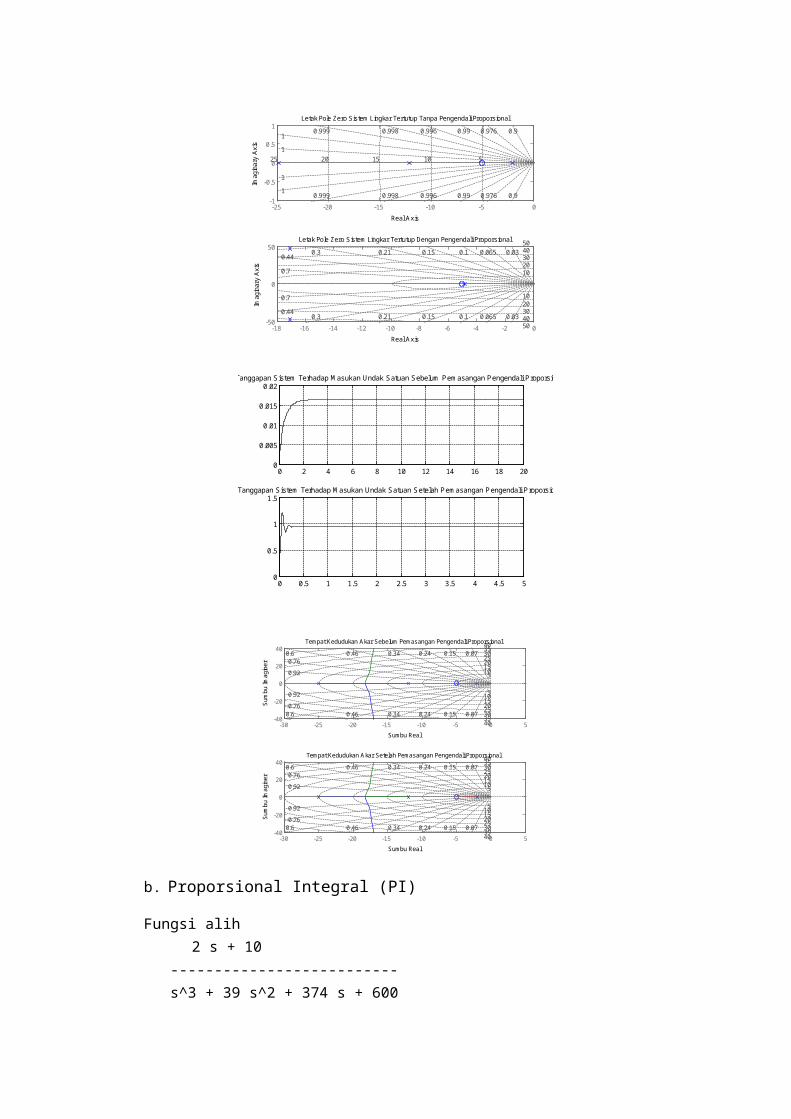
Plot grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional
Real Axis
Imagina
ry Axis
-18 -16 -14 -12 -10 -8 -6 -4 -2 0-50
0
50
0.0650.10.150.210.30.44
0.7
1020304050
1020304050
0.030.0650.10.150.210.30.44
0.7
0.03
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional
Sumbu Real
Sumbu Im
agine
r
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional
Sumbu Real
Sumbu Im
agine
r
b. Proporsional Integral (PI)
Fungsi alih 2 s + 10
-------------------------- s^3 + 39 s^2 + 374 s + 600
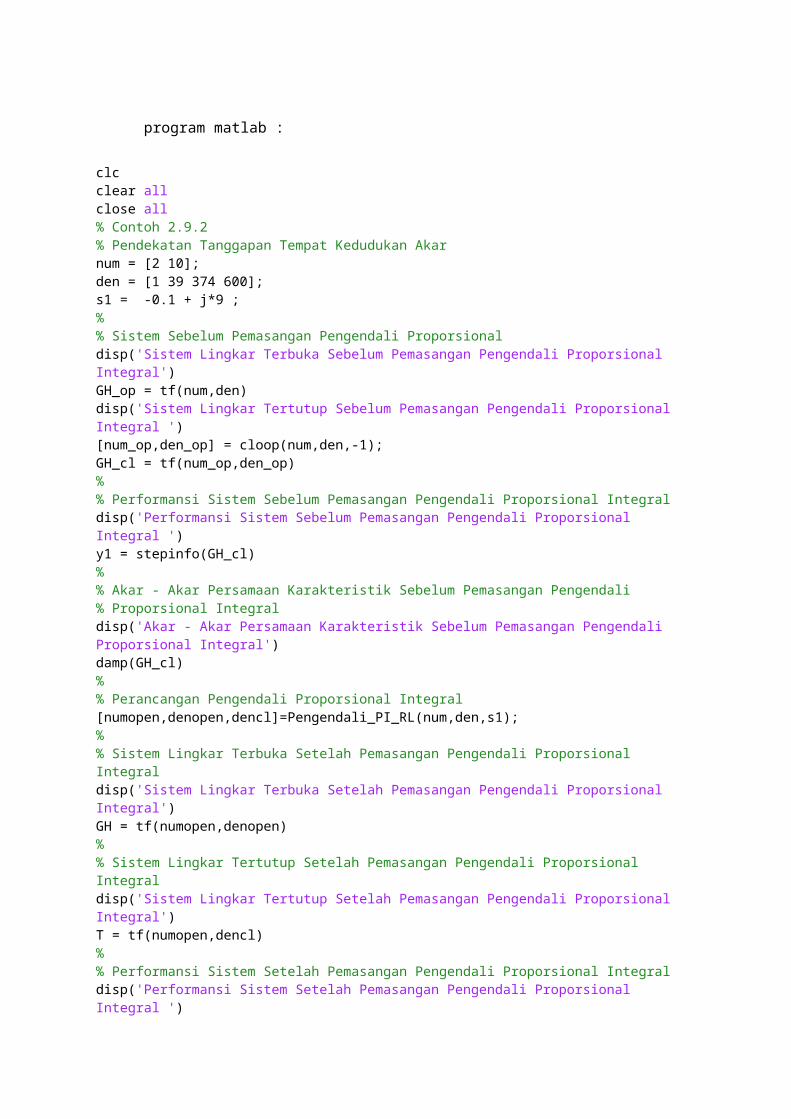
program matlab :
clcclear allclose all% Contoh 2.9.2% Pendekatan Tanggapan Tempat Kedudukan Akar num = [2 10]; den = [1 39 374 600];s1 = -0.1 + j*9 ;% % Sistem Sebelum Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral disp('Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral ')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Integraldisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral')damp(GH_cl)%% Perancangan Pengendali Proporsional Integral [numopen,denopen,dencl]=Pengendali_PI_RL(num,den,s1);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integraldisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integraldisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integraldisp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral ')
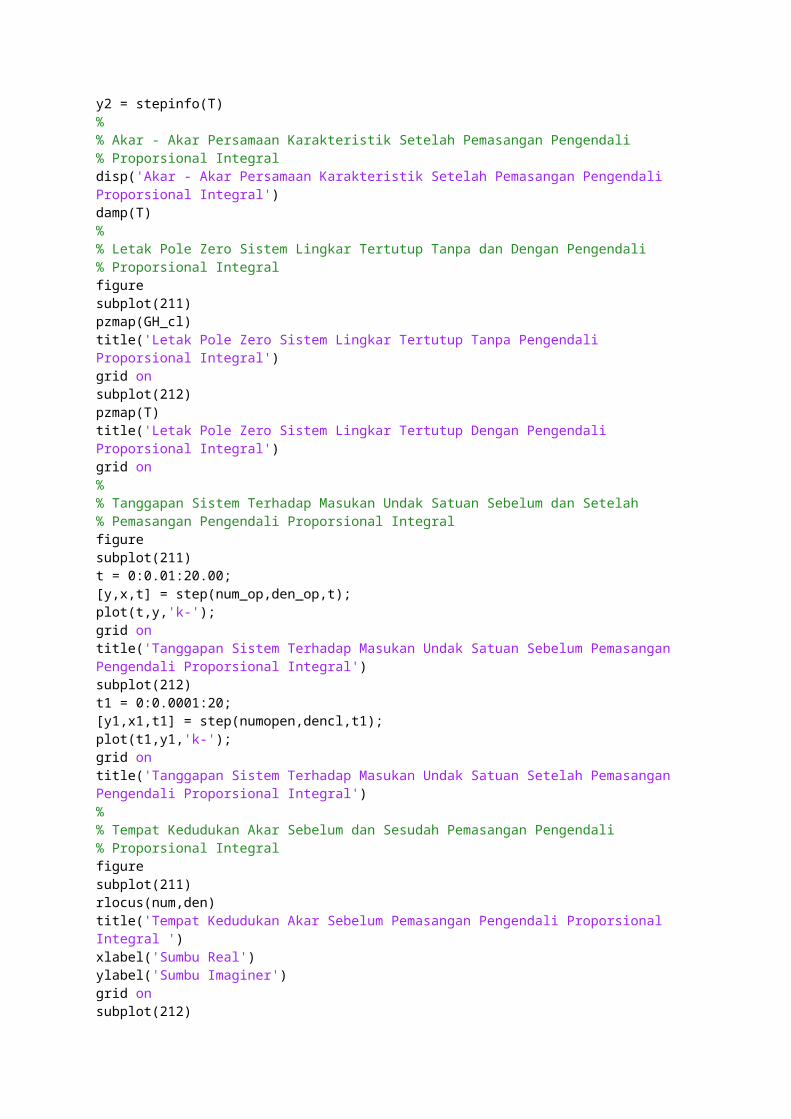
y2 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Integraldisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral')damp(T)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Integralfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Integralfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Integral')subplot(212)t1 = 0:0.0001:20; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Integral') %% Tempat Kedudukan Akar Sebelum dan Sesudah Pemasangan Pengendali% Proporsional Integralfiguresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Integral ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on subplot(212)
rlocus(numopen,denopen)title('Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Integral')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
hasil program :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral
y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral
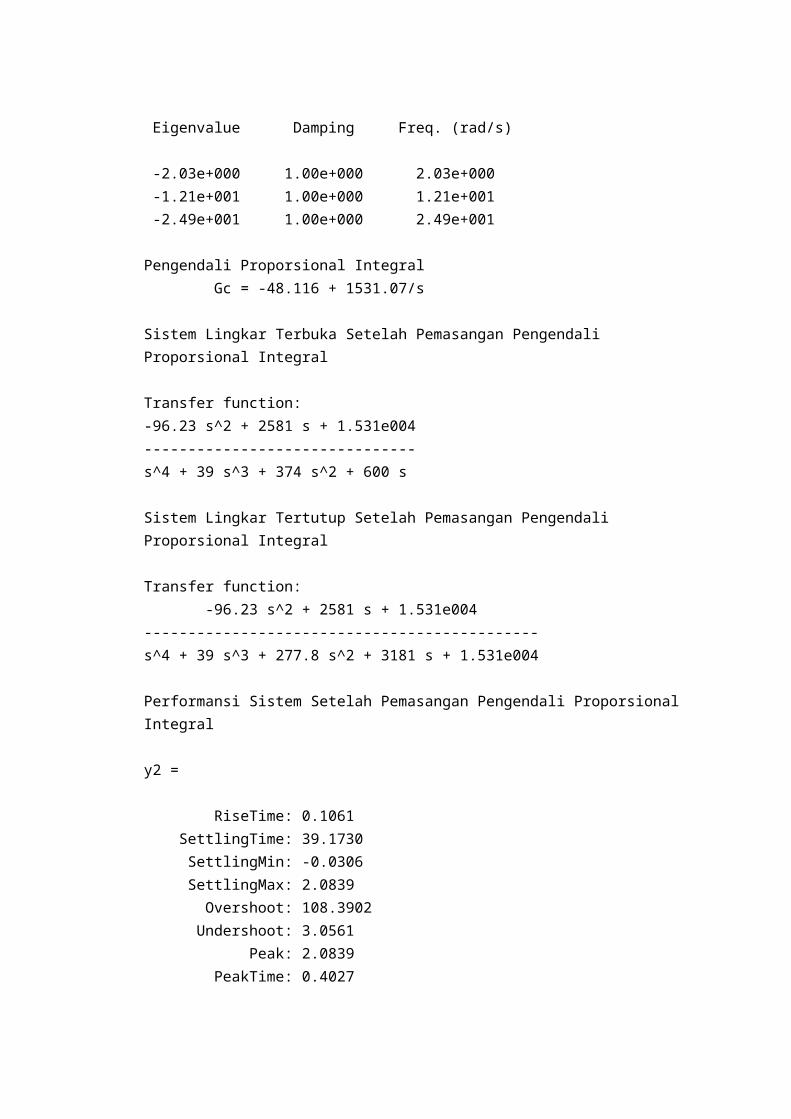
Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Pengendali Proporsional Integral Gc = -48.116 + 1531.07/s
Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Transfer function:-96.23 s^2 + 2581 s + 1.531e004-------------------------------s^4 + 39 s^3 + 374 s^2 + 600 s Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Transfer function: -96.23 s^2 + 2581 s + 1.531e004---------------------------------------------s^4 + 39 s^3 + 277.8 s^2 + 3181 s + 1.531e004 Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral
y2 =
RiseTime: 0.1061 SettlingTime: 39.1730 SettlingMin: -0.0306 SettlingMax: 2.0839 Overshoot: 108.3902 Undershoot: 3.0561 Peak: 2.0839 PeakTime: 0.4027
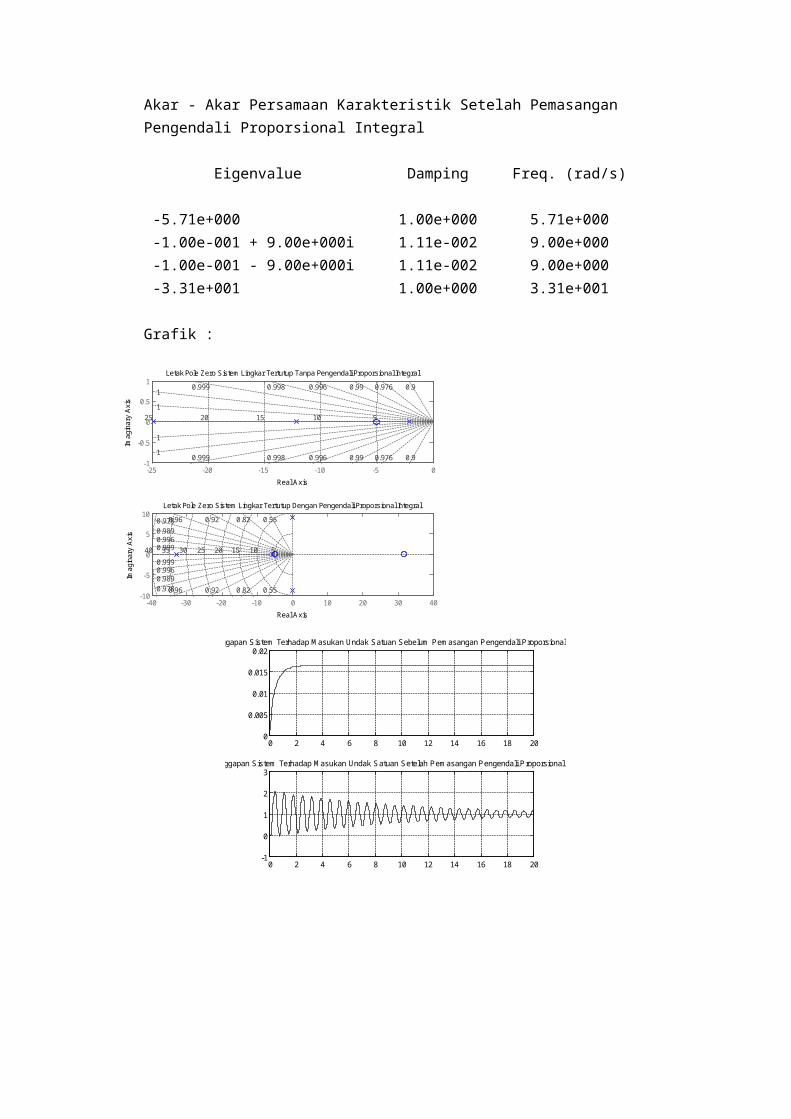
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Eigenvalue Damping Freq. (rad/s) -5.71e+000 1.00e+000 5.71e+000 -1.00e-001 + 9.00e+000i 1.11e-002 9.00e+000 -1.00e-001 - 9.00e+000i 1.11e-002 9.00e+000 -3.31e+001 1.00e+000 3.31e+001
Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral
Real Axis
Imagina
ry Axis
-40 -30 -20 -10 0 10 20 30 40-10
-5
0
5
10 0.550.820.920.960.9780.9890.9960.999
0.550.820.920.960.9780.9890.9960.999
510152025303540
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Integral
0 2 4 6 8 10 12 14 16 18 20-1
0
1
2
3Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Integral
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Integral
Sumbu Real
Sumbu Im
agine
r
-250 -200 -150 -100 -50 0 50 100 150 200-40
-20
0
20
40 0.70.890.9550.9780.9890.9950.9981
0.70.890.9550.9780.9890.9950.9981
50100150200250
Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Integral
Sumbu Real
Sumbu Im
agine
r
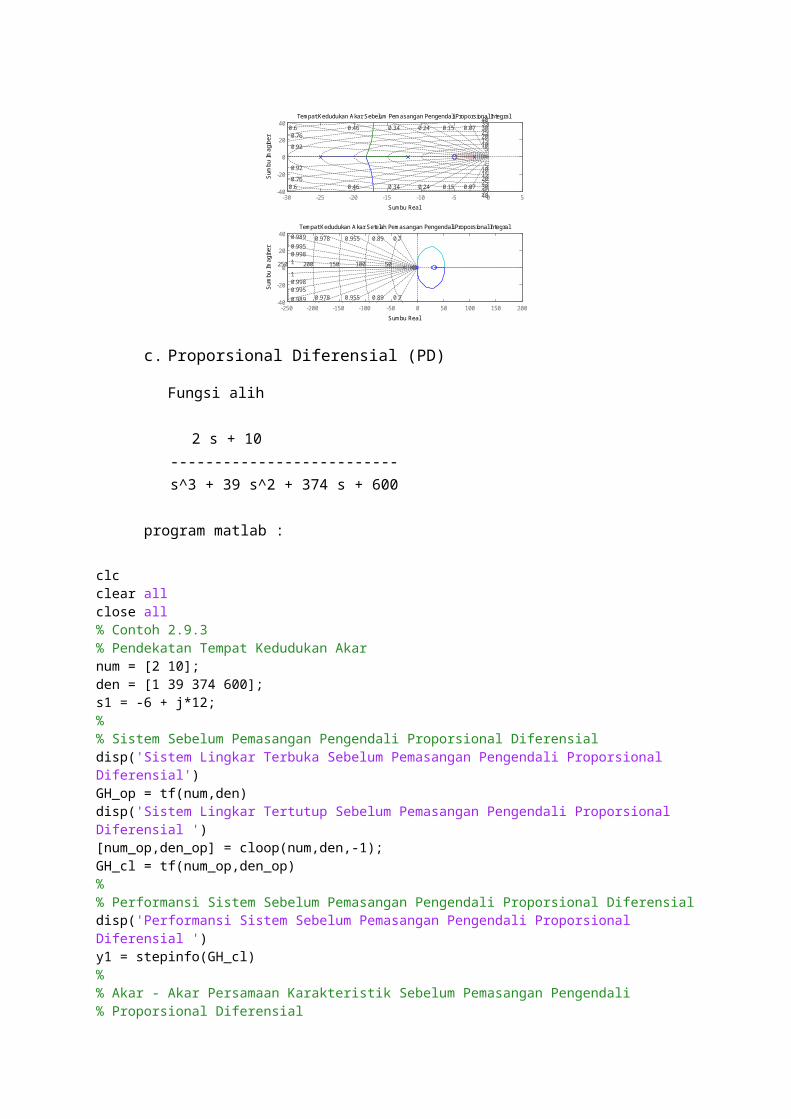
c. Proporsional Diferensial (PD)
Fungsi alih
2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600
program matlab :
clcclear allclose all% Contoh 2.9.3% Pendekatan Tempat Kedudukan Akar num = [2 10]; den = [1 39 374 600];s1 = -6 + j*12;% % Sistem Sebelum Pemasangan Pengendali Proporsional Diferensial disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Diferensial')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Diferensial ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Diferensialdisp('Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Diferensial ')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Diferensial
disp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Diferensial')damp(GH_cl)%% Perancangan Pengendali Proporsional Diferensial [numopen,denopen,dencl]=Pengendali_PD_RL(num,den,s1);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional% Diferensialdisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Diferensial')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional% Diferensialdisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Diferensial')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensialdisp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensial ')y2 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Diferensialdisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial')damp(T)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Diferensialfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Diferensial')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Diferensial')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Diferensialfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');
grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Diferensial')subplot(212)t1 = 0:0.0001:20; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Diferensial') %% Tempat Kedudukan Akar Sebelum dan Sesudah Pemasangan Pengendali% Proporsional Diferensialfiguresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Diferensial ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on subplot(212)rlocus(numopen,denopen)title('Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Diferensial')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
hasil program :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Diferensial
y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Pengendali Proporsional Diferensial Gc = -22.1379 + -12.4483s
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -2.10e+000 1.00e+000 2.10e+000 -6.00e+000 + 1.20e+001i 4.47e-001 1.34e+001 -6.00e+000 - 1.20e+001i 4.47e-001 1.34e+001 Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Diferensial Transfer function:
-24.9 s^2 - 168.8 s - 221.4---------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Diferensial Transfer function: -24.9 s^2 - 168.8 s - 221.4--------------------------------s^3 + 14.1 s^2 + 205.2 s + 378.6 Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensial
y2 =
RiseTime: 0.0210 SettlingTime: 0.7938 SettlingMin: -1.4467 SettlingMax: -0.4479 Overshoot: 147.4268 Undershoot: 0 Peak: 1.4467 PeakTime: 0.1224
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -2.10e+000 1.00e+000 2.10e+000 -6.00e+000 + 1.20e+001i 4.47e-001 1.34e+001 -6.00e+000 - 1.20e+001i 4.47e-001 1.34e+001
Gtafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Diferensial
Real Axis
Imagina
ry Axis
-7 -6 -5 -4 -3 -2 -1 0-20
-10
0
10
20
0.20.280.42
0.7
2.557.51012.51517.520
2.557.51012.51517.520
0.030.0650.10.150.20.280.42
0.7
0.030.0650.10.15
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Diferensial
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Diferensial
0 2 4 6 8 10 12 14 16 18 20-1.5
-1
-0.5
0Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Diferensial
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Diferensial
Sumbu Real
Sumbu Im
agine
r
-30 -20 -10 0 10 20 30 40-20
-10
0
10
20 0.30.520.70.820.90.950.9780.994
0.30.520.70.820.90.950.9780.994
51015202530
Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Diferensial
Sumbu Real
Sumbu Im
agine
r
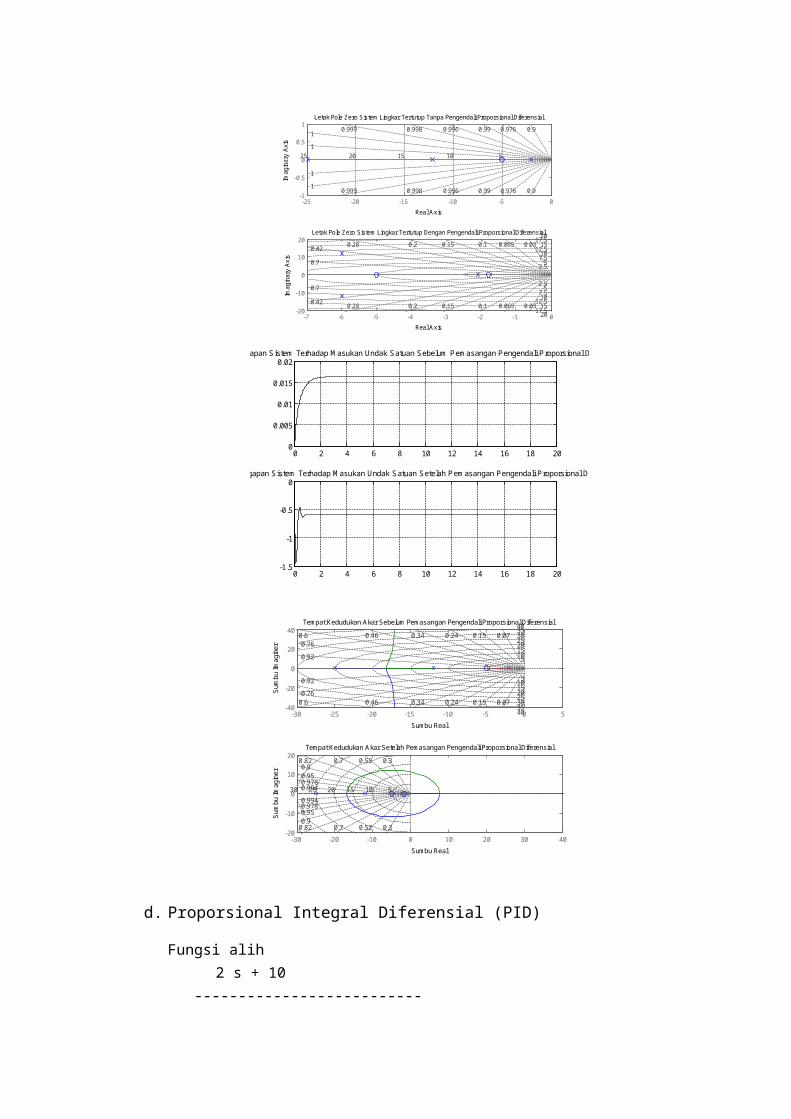
d. Proporsional Integral Diferensial (PID)
Fungsi alih 2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
program matlab :
% Contoh 2.9.4% Pendekatan Tempat Kedudukan Akar num = [2 10]; den = [1 39 374 600];s1 = -15 + j*10; % % Sistem Sebelum Pemasangan Pengendali Proporsional Integral Diferensial disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral Diferensial')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral Diferensial disp('Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Integral Diferensialdisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral Diferensial')damp(GH_cl)%% Perancangan Pengendali Proporsional Integral Integral Diferensial [numopen,denopen,dencl]=Pengendali_PID_RL(num,den,s1);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional% Integral Diferensialdisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Diferensial')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional% Integral Diferensialdisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Diferensial')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial
disp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial ')y2 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Integral Diferensialdisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Diferensial')damp(T)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Integral Diferensialfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral Diferensial')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral Diferensial')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Integral Diferensialfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Integral Diferensial')subplot(212)t1 = 0:0.0001:10; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Integral Diferensial') %% Tempat Kedudukan Akar Sebelum dan Sesudah Pemasangan Pengendali% Proporsional Integral Diferensialfiguresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')
grid on subplot(212)rlocus(numopen,[denopen 0 0])title('Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Integral Diferensial')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
hasil program :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
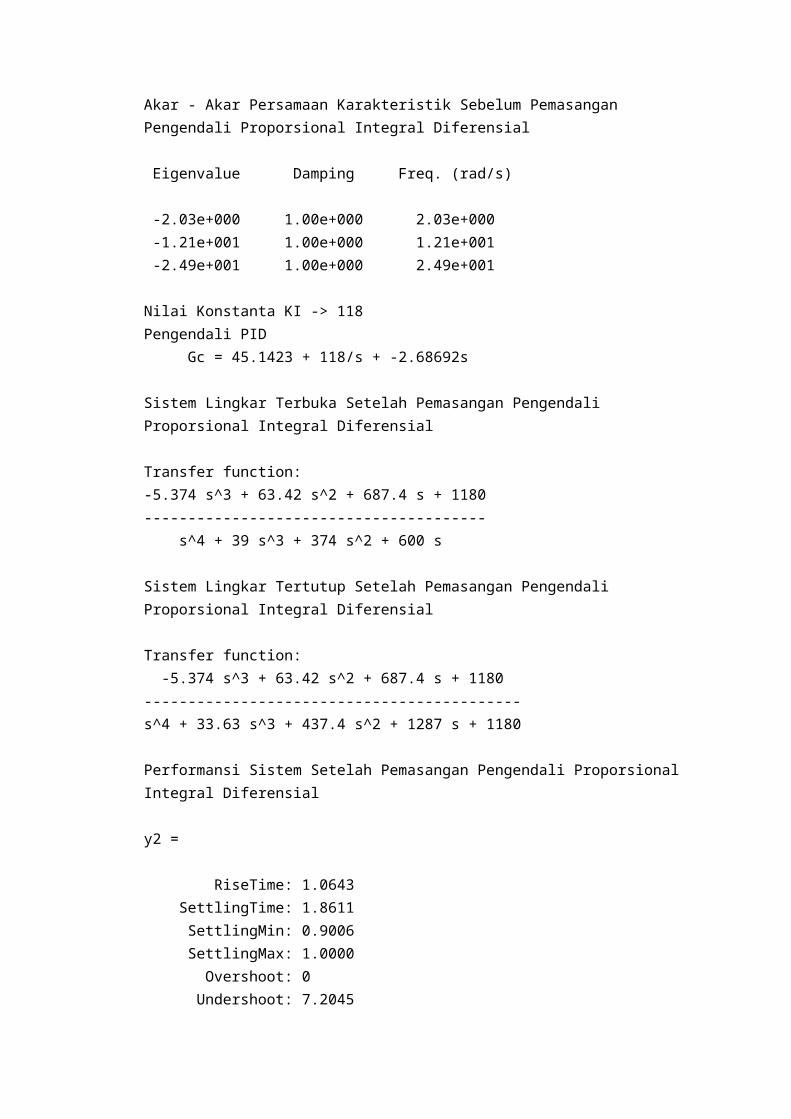
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral Diferensial Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Nilai Konstanta KI -> 118Pengendali PID Gc = 45.1423 + 118/s + -2.68692s
Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Diferensial Transfer function:-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180--------------------------------------- s^4 + 39 s^3 + 374 s^2 + 600 s Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Diferensial Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180 Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial
y2 =
RiseTime: 1.0643 SettlingTime: 1.8611 SettlingMin: 0.9006 SettlingMax: 1.0000 Overshoot: 0 Undershoot: 7.2045
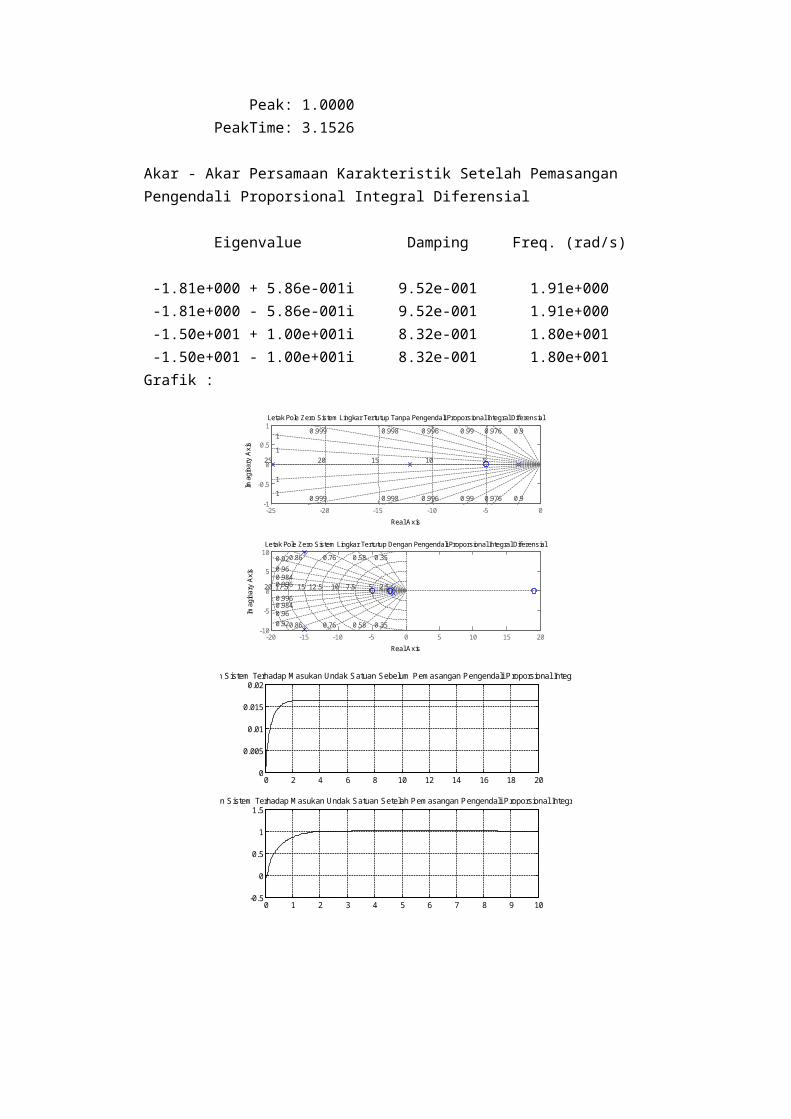
Peak: 1.0000 PeakTime: 3.1526
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Diferensial Eigenvalue Damping Freq. (rad/s) -1.81e+000 + 5.86e-001i 9.52e-001 1.91e+000 -1.81e+000 - 5.86e-001i 9.52e-001 1.91e+000 -1.50e+001 + 1.00e+001i 8.32e-001 1.80e+001 -1.50e+001 - 1.00e+001i 8.32e-001 1.80e+001Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral Diferensial
Real Axis
Imagina
ry Axis
-20 -15 -10 -5 0 5 10 15 20-10
-5
0
5
10 0.350.580.760.860.920.960.9840.996
0.350.580.760.860.920.960.9840.996
2.557.51012.51517.520
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral Diferensial
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Integral Diferensial
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Integral Diferensial
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Sumbu RealSumbu Im
agine
r
-80 -60 -40 -20 0 20 40 60 80 100-100
-50
0
50
100
0.920.98
0.160.30.460.60.720.840.920.98
20406080100
20406080100
0.160.30.460.60.720.84
Tempat Kedudukan Akar Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Sumbu Real
Sumbu Im
agine
r
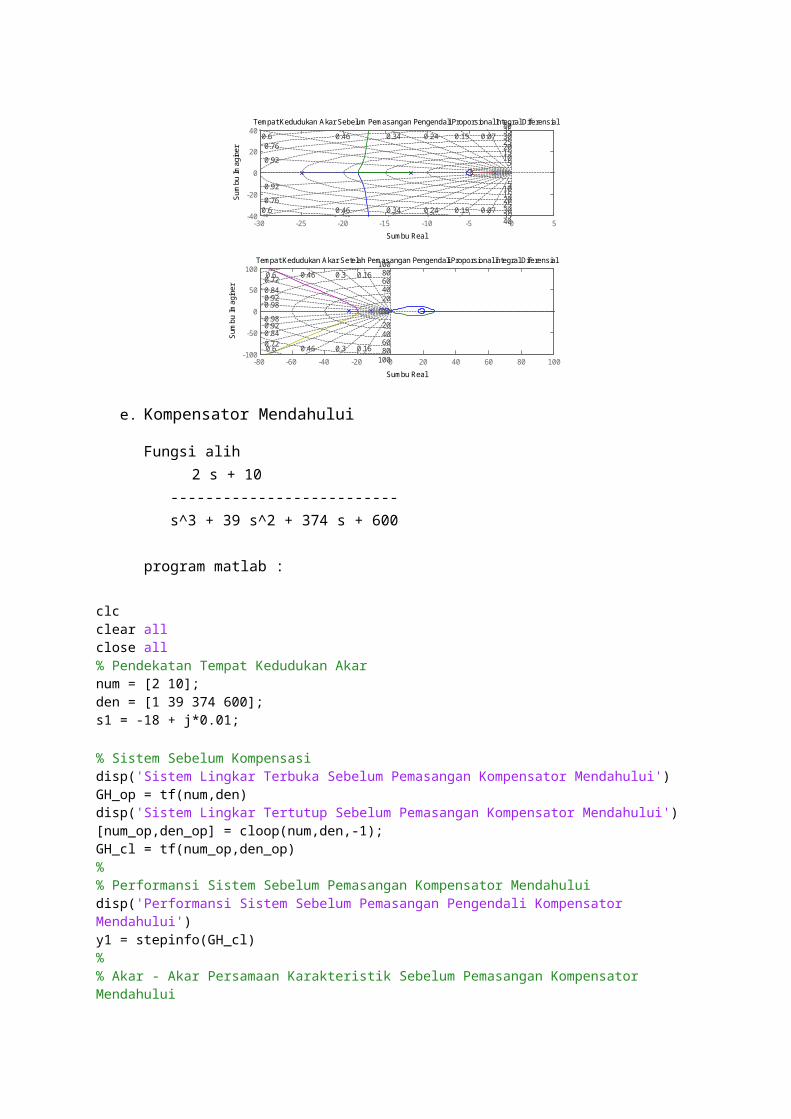
e. Kompensator Mendahului
Fungsi alih 2 s + 10
-------------------------- s^3 + 39 s^2 + 374 s + 600
program matlab :
clcclear allclose all% Pendekatan Tempat Kedudukan Akar num = [2 10]; den = [1 39 374 600];s1 = -18 + j*0.01; % Sistem Sebelum Kompensasi disp('Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Mendahului')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Mendahului')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Sebelum Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Sebelum Pemasangan Pengendali Kompensator Mendahului')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului
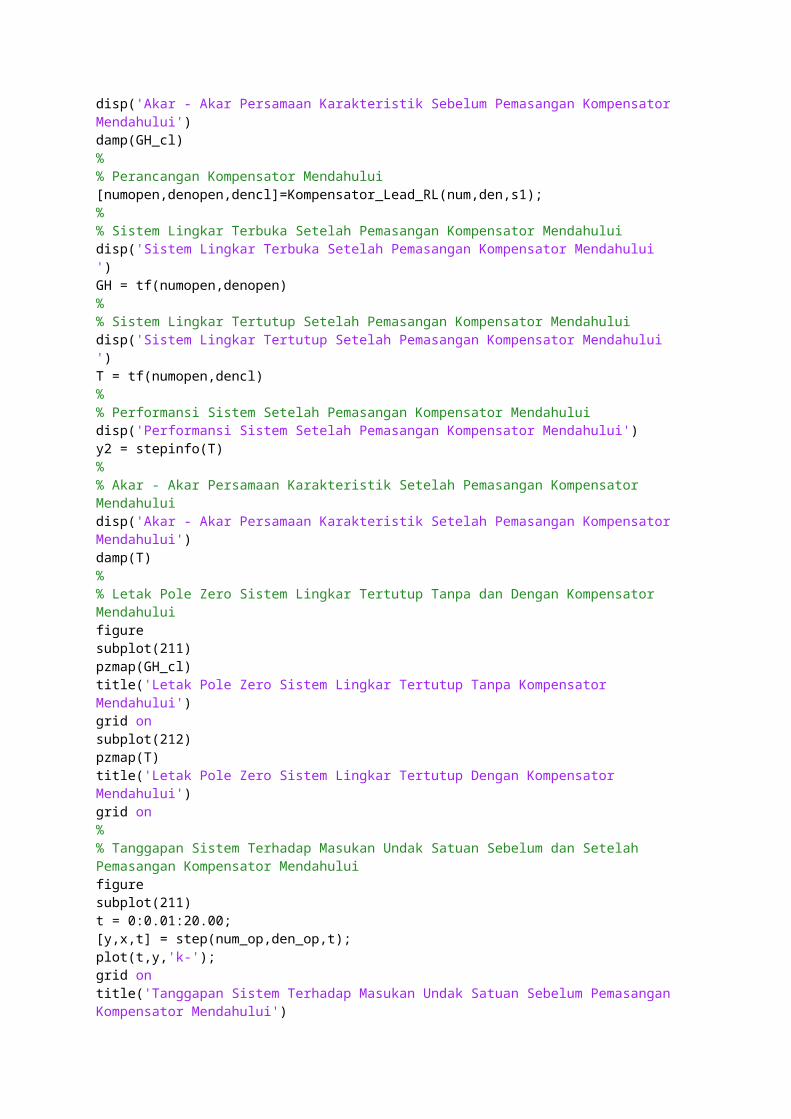
disp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului')damp(GH_cl)%% Perancangan Kompensator Mendahului [numopen,denopen,dencl]=Kompensator_Lead_RL(num,den,s1);%% Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahului ')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahului ')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Setelah Pemasangan Kompensator Mendahului')y2 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahuluidisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahului')damp(T)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Kompensator Mendahuluifiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Kompensator Mendahului')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Kompensator Mendahului')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah Pemasangan Kompensator Mendahuluifiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Kompensator Mendahului')
subplot(212)t1 = 0:0.0001:5.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Kompensator Mendahului')%% Tempat Kedudukan Akar Sebelum dan Sesudah Pemasangan Kompensator Mendahuluifiguresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Kompensator Mendahului')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on subplot(212)rlocus(numopen,denopen)title('Tempat Kedudukan Akar Setelah Pemasangan Kompensator Mendahului')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
hasil program :Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Mendahului Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Sebelum Pemasangan Pengendali Kompensator Mendahului
y1 =
RiseTime: 0.9587
SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Nilai DC Gain -> 1
Gc(0) = 1, Gc = 31.1442(s + -0.123239)/(s + -3.83817)
Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahului Transfer function: 62.29 s^2 + 303.8 s - 38.38--------------------------------------------s^4 + 35.16 s^3 + 224.3 s^2 - 835.5 s - 2303 Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahului Transfer function: 62.29 s^2 + 303.8 s - 38.38--------------------------------------------s^4 + 35.16 s^3 + 286.6 s^2 - 531.7 s - 2341 Performansi Sistem Setelah Pemasangan Kompensator Mendahului
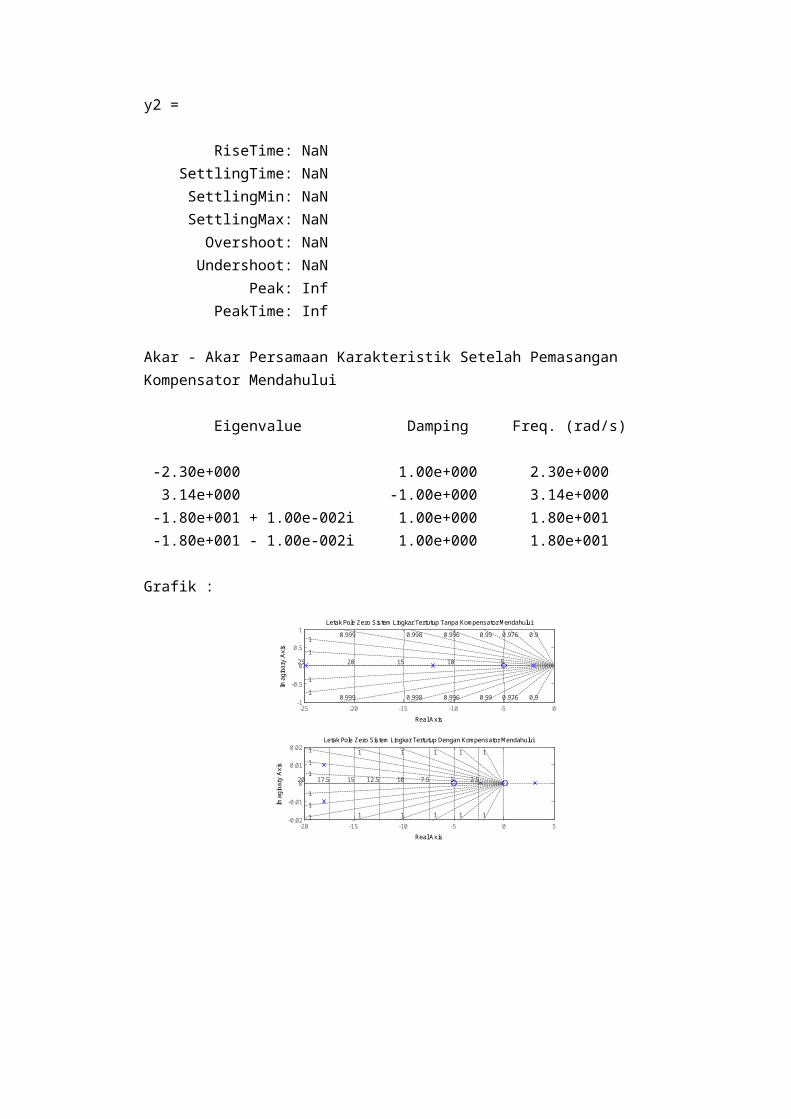
y2 =
RiseTime: NaN SettlingTime: NaN SettlingMin: NaN SettlingMax: NaN Overshoot: NaN Undershoot: NaN Peak: Inf PeakTime: Inf
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahului Eigenvalue Damping Freq. (rad/s) -2.30e+000 1.00e+000 2.30e+000 3.14e+000 -1.00e+000 3.14e+000 -1.80e+001 + 1.00e-002i 1.00e+000 1.80e+001 -1.80e+001 - 1.00e-002i 1.00e+000 1.80e+001
Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Kompensator Mendahului
Real Axis
Imagina
ry Axis
-20 -15 -10 -5 0 5-0.02
-0.01
0
0.01
0.02 11111111
11111111
2.557.51012.51517.520
Letak Pole Zero Sistem Lingkar Tertutup Dengan Kompensator Mendahului
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
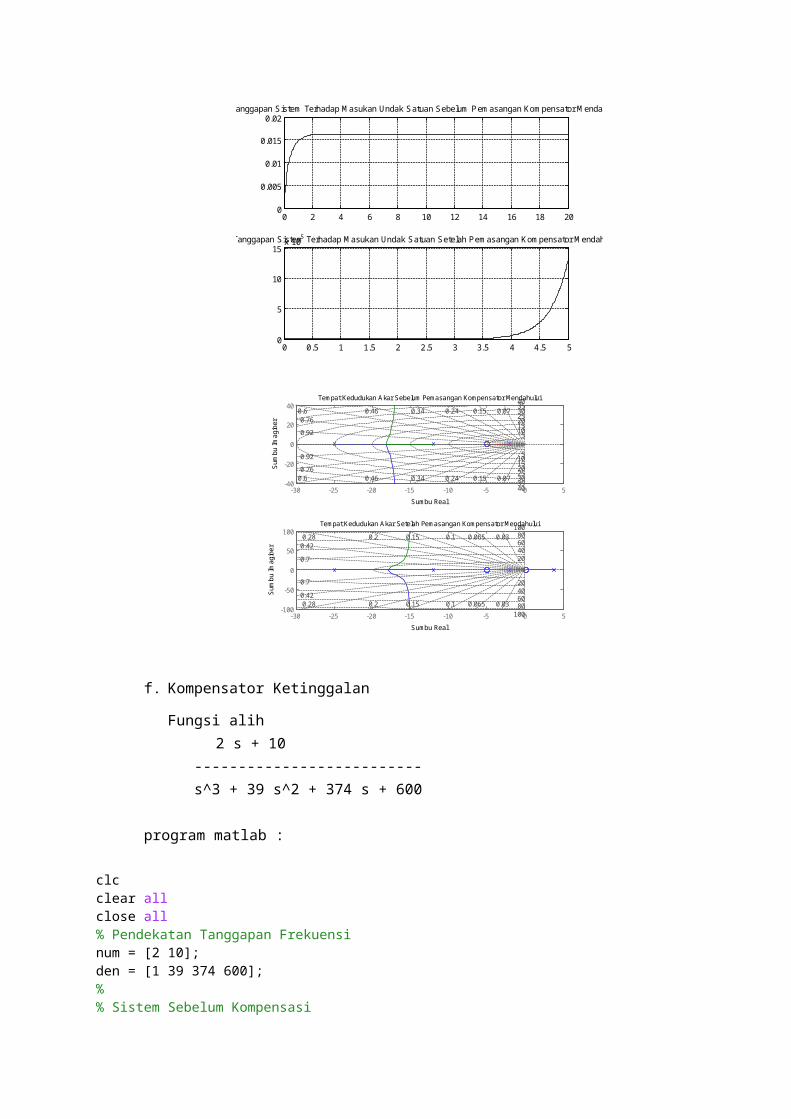
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Kom pensator M endahului
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15x 105Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Kom pensator M endahului
-30 -25 -20 -15 -10 -5 0 5-40
-20
0
20
40 0.070.150.240.340.460.60.760.92
0.070.150.240.340.460.60.760.92
510152025303540
510152025303540
Tempat Kedudukan Akar Sebelum Pemasangan Kompensator Mendahului
Sumbu Real
Sumbu Im
agine
r
-30 -25 -20 -15 -10 -5 0 5-100
-50
0
50
100
0.7
0.030.0650.10.150.20.280.420.7
20406080100
20406080100
0.030.0650.10.150.20.280.42
Tempat Kedudukan Akar Setelah Pemasangan Kompensator Mendahului
Sumbu Real
Sumbu Im
agine
r
f. Kompensator Ketinggalan
Fungsi alih 2 s + 10
-------------------------- s^3 + 39 s^2 + 374 s + 600
program matlab :
clcclear allclose all% Pendekatan Tanggapan Frekuensinum = [2 10]; den = [1 39 374 600];%% Sistem Sebelum Kompensasi
disp('Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Ketinggalan ')GH_op = tf(num,den)disp('Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Ketinggalan ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)disp('Performansi Sistem Sebelum Pemasangan Pengendali Kompensator Ketinggalan ')Timespec(num_op,den_op)% Perancangan Kompensator Ketinggalan [numopen,denopen,dencl]=Kompensator_Lag_RF(num,den);%disp('Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Ketinggalan ')GH = tf(numopen,denopen)disp('Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Ketinggalan ')T = tf(numopen,dencl)%subplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Kompensator Ketinggalan ')subplot(212)t1 = 0:0.0001:5; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Kompensator Ketinggalan ') %disp('Performansi Sistem Setelah Pemasangan Kompensator Ketinggalan ')Timespec(numopen,dencl);%figuresubplot(211)rlocus(num,den)title('Tempat Kedudukan Akar Sebelum Pemasangan Kompensator Ketinggalan ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on subplot(212)rlocus(numopen,denopen)title('Tempat Kedudukan Akar Setelah Pemasangan Kompensator Ketinggalan ')xlabel('Sumbu Real')ylabel('Sumbu Imaginer')grid on
hasil program :Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Ketinggalan Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Ketinggalan Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Sebelum Pemasangan Pengendali Kompensator Ketinggalan
Waktu Naik = 0.962508Waktu Keadaan Mantap = 1.80655
Nilai DC Gain Kompensator -> 1Phase Margin Diinginkan -> 2
2.10Performans isistem Lingkar Terbuka dalam Domain Waktu Dengan Pengendali
a. Proporsional Integral Diferensial (PID)Fungsi alih
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
---------------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
program matlab :
clcclear allclose allnum = [-5.374 63.42 687.4 1180];den = [1 39 374 600];sys = tf(num,den)
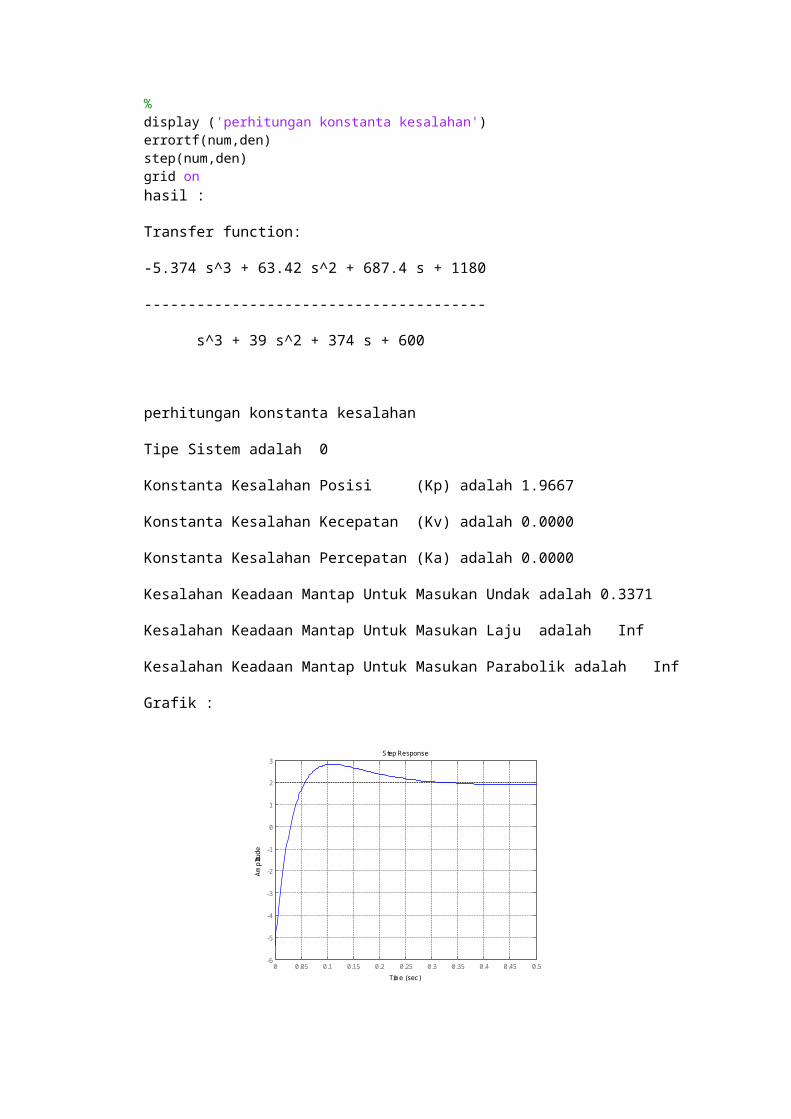
%display ('perhitungan konstanta kesalahan')errortf(num,den)step(num,den)grid onhasil :
Transfer function:
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
---------------------------------------
s^3 + 39 s^2 + 374 s + 600
perhitungan konstanta kesalahan
Tipe Sistem adalah 0
Konstanta Kesalahan Posisi (Kp) adalah 1.9667
Konstanta Kesalahan Kecepatan (Kv) adalah 0.0000
Konstanta Kesalahan Percepatan (Ka) adalah 0.0000
Kesalahan Keadaan Mantap Untuk Masukan Undak adalah 0.3371
Kesalahan Keadaan Mantap Untuk Masukan Laju adalah Inf
Kesalahan Keadaan Mantap Untuk Masukan Parabolik adalah Inf
Grafik :
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-6
-5
-4
-3
-2
-1
0
1
2
3Step Response
Time (sec)
Amplitude
2.11Performansi System Lingkar Tertutup dalam Domain Waktu Dengan Pengendali
Plot grafik tanggapan peralihan sistem terhadap masukan impulsa satuan
a. Proporsional Integral Diferensial (PID)Fungsi alih :
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
-------------------------------------------
s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
num = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];sys = tf(num,den)y = stepinfo (tf(num,den))t = 0: 0.1 : 10;y = impulse(num,den ,t);plot (t,y, 'k-' )grid on%step(num,den)grid on
program matlab :
Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
y =
RiseTime: 1.0634 SettlingTime: 1.8587 SettlingMin: 0.9005 SettlingMax: 1.0000 Overshoot: 5.0543e-004 Undershoot: 7.2049
Peak: 1.0000 PeakTime: 3.1492Grafik :
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (sec)
Amplitude
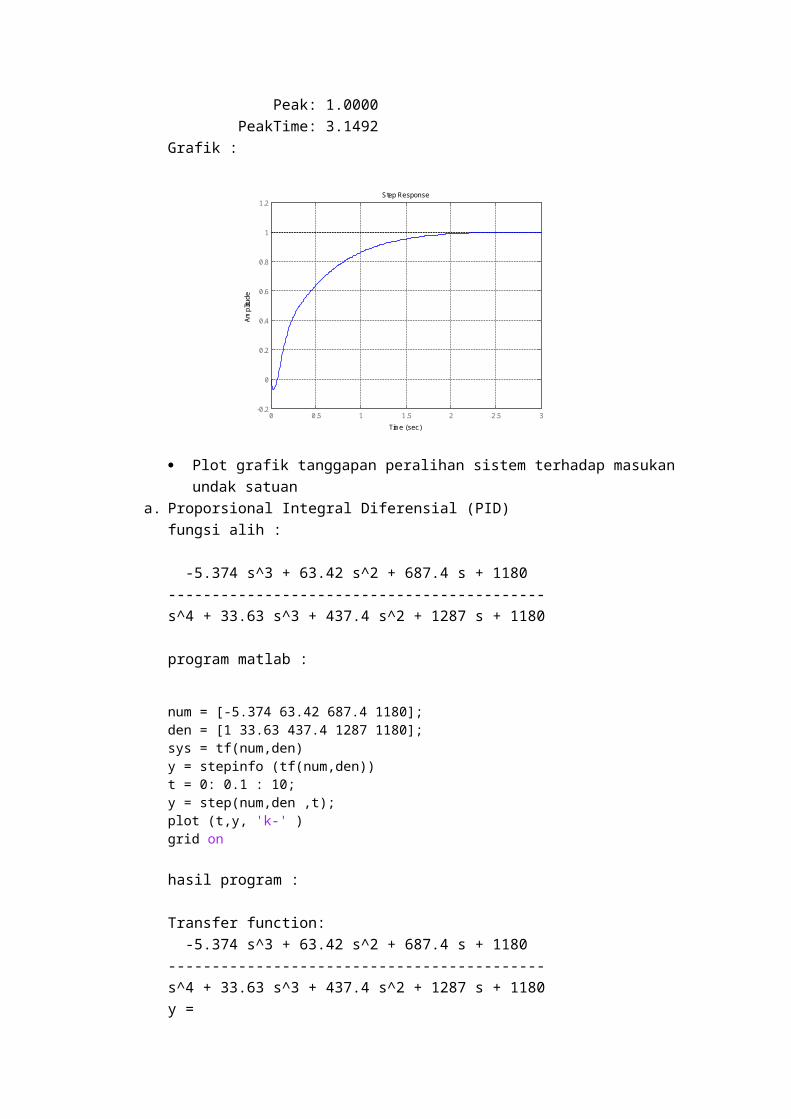
Plot grafik tanggapan peralihan sistem terhadap masukan undak satuan
a. Proporsional Integral Diferensial (PID)fungsi alih :
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
program matlab :
num = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];sys = tf(num,den)y = stepinfo (tf(num,den))t = 0: 0.1 : 10;y = step(num,den ,t);plot (t,y, 'k-' )grid on
hasil program :
Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180y =
RiseTime: 1.0634 SettlingTime: 1.8587 SettlingMin: 0.9005 SettlingMax: 1.0000 Overshoot: 5.0543e-004 Undershoot: 7.2049 Peak: 1.0000 PeakTime: 3.1492Grafik :
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
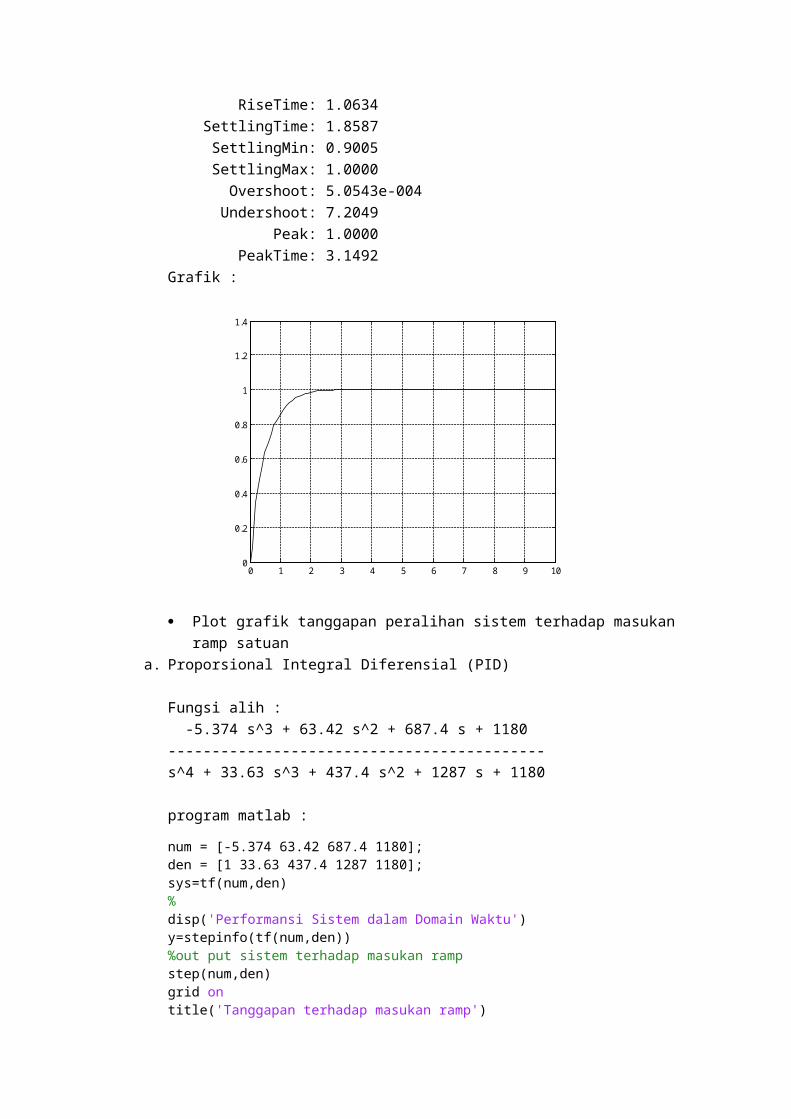
Plot grafik tanggapan peralihan sistem terhadap masukan ramp satuan
a. Proporsional Integral Diferensial (PID)
Fungsi alih : -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
program matlab :
num = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];sys=tf(num,den)%disp('Performansi Sistem dalam Domain Waktu')y=stepinfo(tf(num,den))%out put sistem terhadap masukan rampstep(num,den)grid ontitle('Tanggapan terhadap masukan ramp')
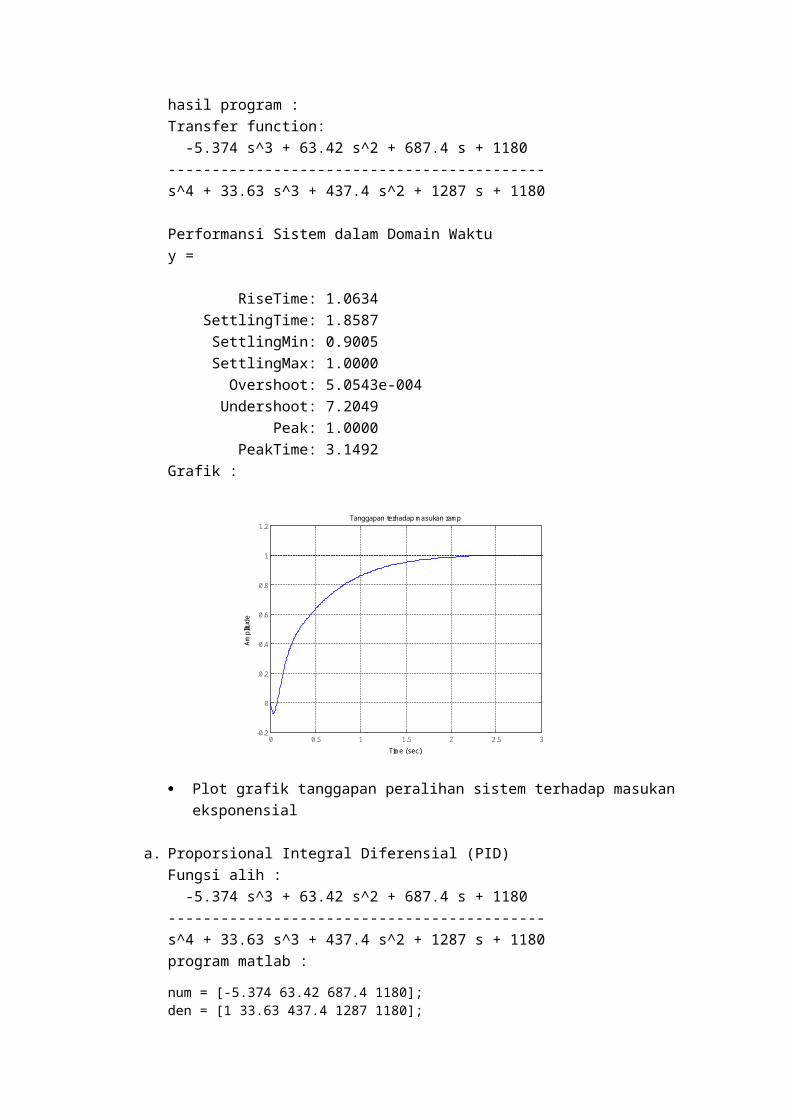
hasil program :Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180 Performansi Sistem dalam Domain Waktuy =
RiseTime: 1.0634 SettlingTime: 1.8587 SettlingMin: 0.9005 SettlingMax: 1.0000 Overshoot: 5.0543e-004 Undershoot: 7.2049 Peak: 1.0000 PeakTime: 3.1492Grafik :
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6
0.8
1
1.2Tanggapan terhadap masukan ramp
Time (sec)
Amplitude
Plot grafik tanggapan peralihan sistem terhadap masukan eksponensial
a. Proporsional Integral Diferensial (PID)Fungsi alih : -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180program matlab :
num = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];
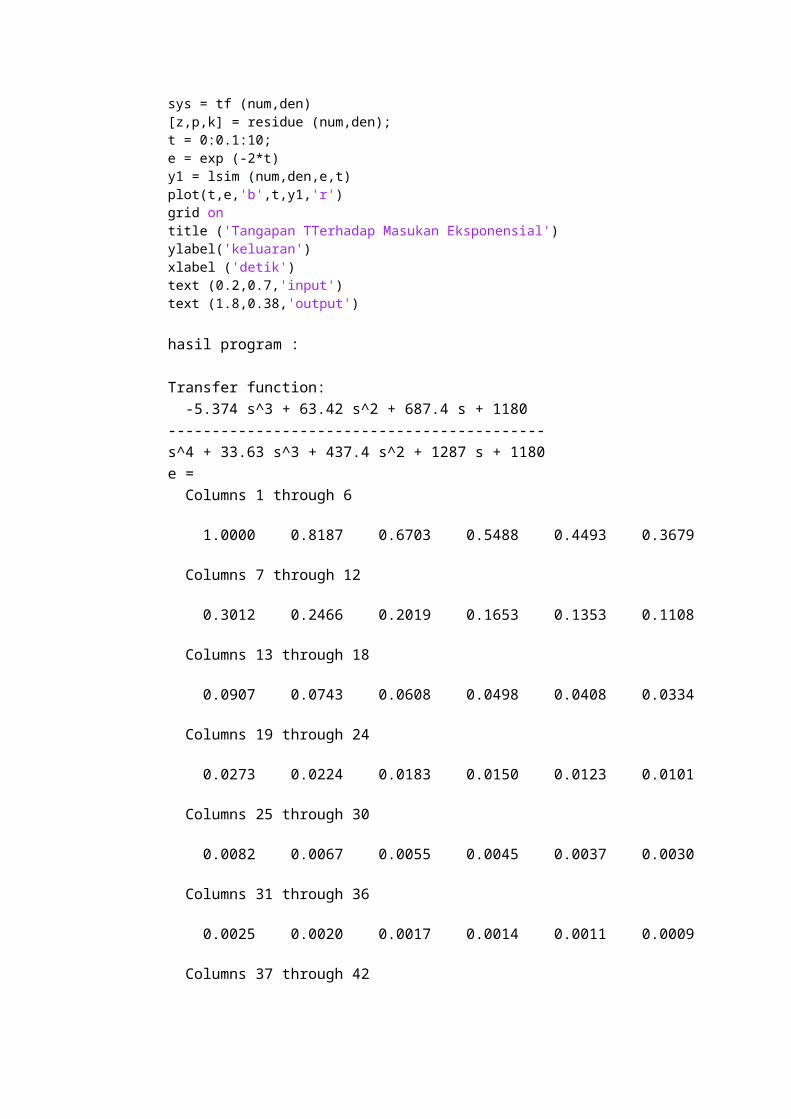
sys = tf (num,den)[z,p,k] = residue (num,den);t = 0:0.1:10;e = exp (-2*t)y1 = lsim (num,den,e,t)plot(t,e,'b',t,y1,'r')grid ontitle ('Tangapan TTerhadap Masukan Eksponensial')ylabel('keluaran')xlabel ('detik')text (0.2,0.7,'input')text (1.8,0.38,'output')
hasil program :
Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180e = Columns 1 through 6
1.0000 0.8187 0.6703 0.5488 0.4493 0.3679
Columns 7 through 12
0.3012 0.2466 0.2019 0.1653 0.1353 0.1108
Columns 13 through 18
0.0907 0.0743 0.0608 0.0498 0.0408 0.0334
Columns 19 through 24
0.0273 0.0224 0.0183 0.0150 0.0123 0.0101
Columns 25 through 30
0.0082 0.0067 0.0055 0.0045 0.0037 0.0030
Columns 31 through 36
0.0025 0.0020 0.0017 0.0014 0.0011 0.0009
Columns 37 through 42
0.0007 0.0006 0.0005 0.0004 0.0003 0.0003
Columns 43 through 48
0.0002 0.0002 0.0002 0.0001 0.0001 0.0001
Columns 49 through 54
0.0001 0.0001 0.0000 0.0000 0.0000 0.0000
Columns 55 through 60
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 61 through 66
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 67 through 72
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 73 through 78
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 79 through 84
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 85 through 90
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 91 through 96
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 97 through 101
0.0000 0.0000 0.0000 0.0000 0.0000
y1 =
0.0000 0.0870
0.3038 0.3711 0.3823 0.3773 0.3643 0.3454 0.3226 0.2975 0.2716 0.2457 0.2206 0.1967 0.1744 0.1537 0.1348 0.1177 0.1023 0.0886 0.0764 0.0657 0.0563 0.0481 0.0409 0.0347 0.0294 0.0248 0.0208 0.0175 0.0146 0.0122 0.0102 0.0084 0.0070 0.0057 0.0047 0.0039 0.0032 0.0026 0.0021 0.0017 0.0014 0.0011 0.0009 0.0007 0.0005 0.0004
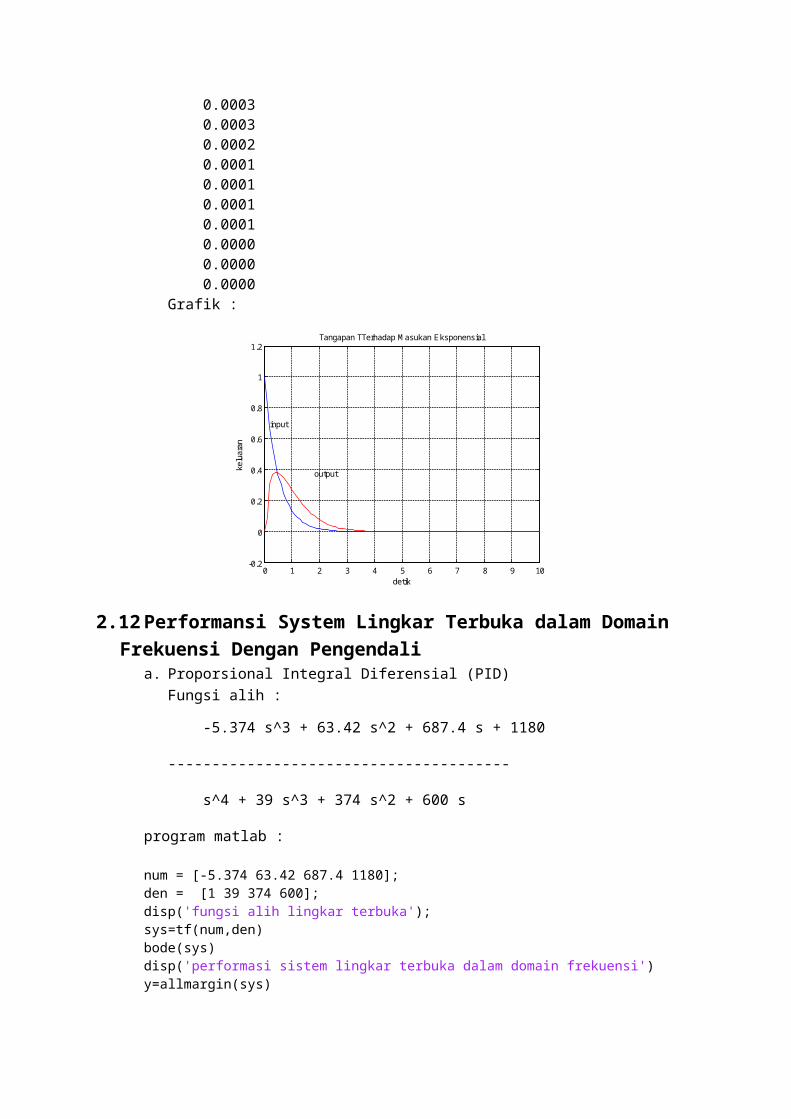
0.0003 0.0003 0.0002 0.0001 0.0001 0.0001 0.0001 0.0000 0.0000 0.0000Grafik :
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Tangapan TTerhadap M asukan Eksponensial
kelua
ran
detik
input
output
2.12Performansi System Lingkar Terbuka dalam Domain Frekuensi Dengan Pengendali
a. Proporsional Integral Diferensial (PID)Fungsi alih :
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
---------------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
program matlab :
num = [-5.374 63.42 687.4 1180];den = [1 39 374 600];disp('fungsi alih lingkar terbuka');sys=tf(num,den)bode(sys)disp('performasi sistem lingkar terbuka dalam domain frekuensi')y=allmargin(sys)
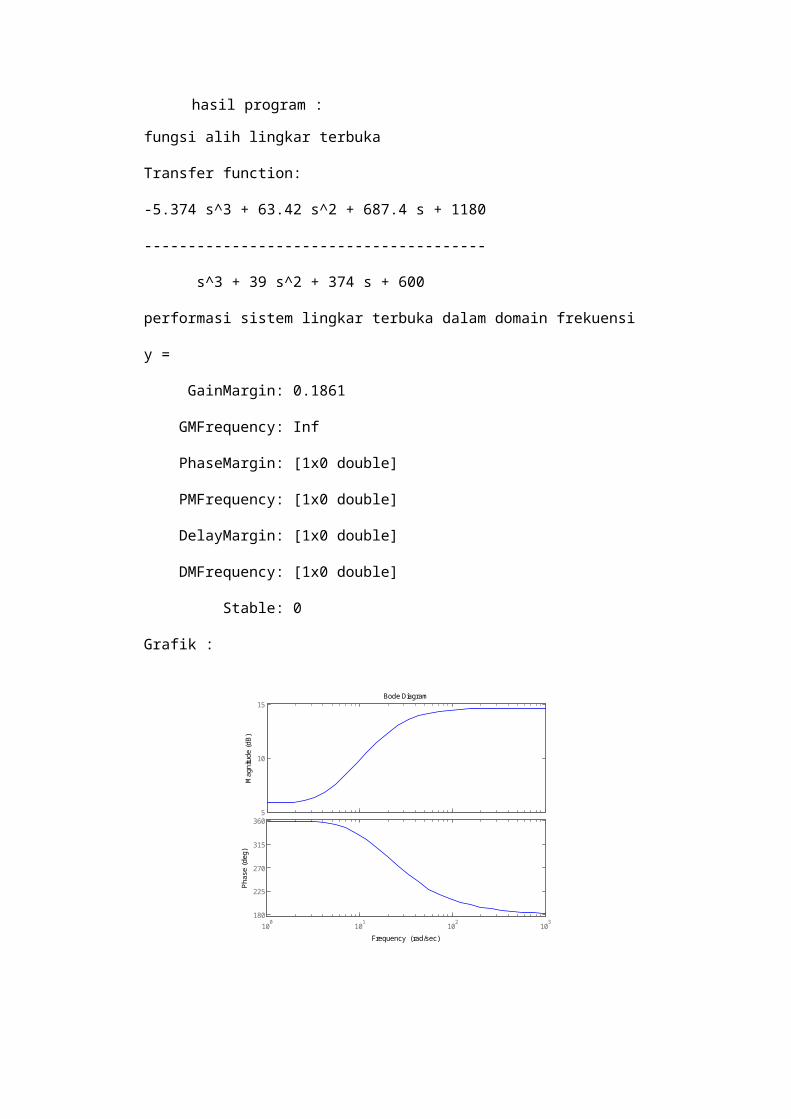
hasil program :
fungsi alih lingkar terbuka
Transfer function:
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
---------------------------------------
s^3 + 39 s^2 + 374 s + 600
performasi sistem lingkar terbuka dalam domain frekuensi
y =
GainMargin: 0.1861
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 0
Grafik :
5
10
15
Magnitude (dB)
100 101 102 103180
225
270
315
360
Phase (deg)
Bode Diagram
Frequency (rad/sec)
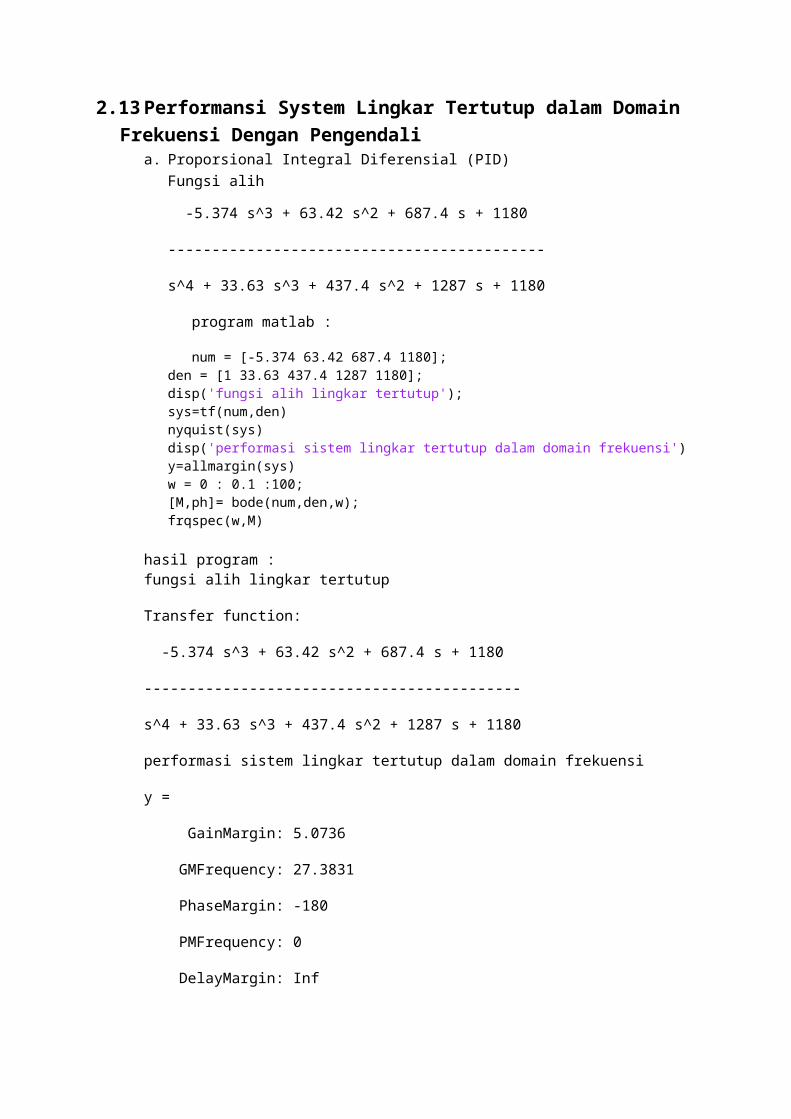
2.13Performansi System Lingkar Tertutup dalam Domain Frekuensi Dengan Pengendali
a. Proporsional Integral Diferensial (PID)Fungsi alih
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
-------------------------------------------
s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
program matlab :
num = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];disp('fungsi alih lingkar tertutup');sys=tf(num,den)nyquist(sys)disp('performasi sistem lingkar tertutup dalam domain frekuensi')y=allmargin(sys)w = 0 : 0.1 :100;[M,ph]= bode(num,den,w);frqspec(w,M)
hasil program :fungsi alih lingkar tertutup
Transfer function:
-5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
-------------------------------------------
s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
performasi sistem lingkar tertutup dalam domain frekuensi
y =
GainMargin: 5.0736
GMFrequency: 27.3831
PhaseMargin: -180
PMFrequency: 0
DelayMargin: Inf
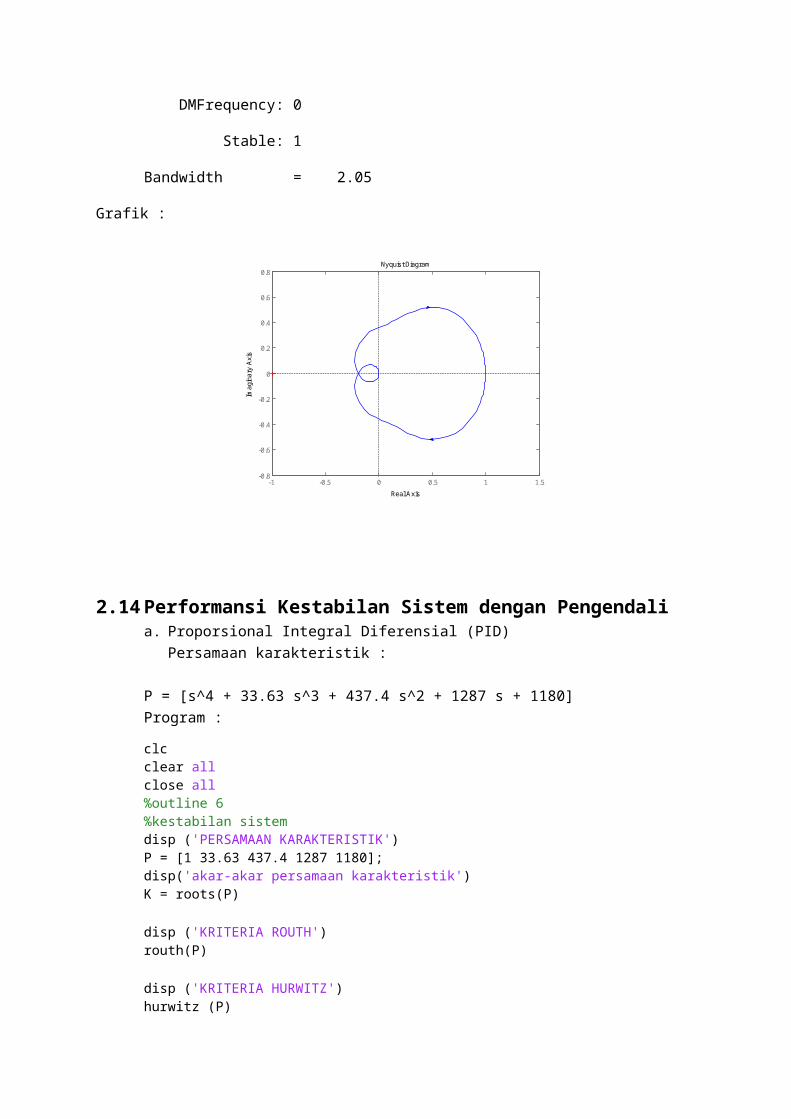
DMFrequency: 0
Stable: 1
Bandwidth = 2.05
Grafik :
-1 -0.5 0 0.5 1 1.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Nyquist Diagram
Real Axis
Imagina
ry Axis
2.14Performansi Kestabilan Sistem dengan Pengendali a. Proporsional Integral Diferensial (PID)
Persamaan karakteristik :
P = [s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180]Program :
clcclear allclose all%outline 6%kestabilan sistemdisp ('PERSAMAAN KARAKTERISTIK')P = [1 33.63 437.4 1287 1180];disp('akar-akar persamaan karakteristik')K = roots(P) disp ('KRITERIA ROUTH')routh(P) disp ('KRITERIA HURWITZ')hurwitz (P)
hasil :
PERSAMAAN KARAKTERISTIKakar-akar persamaan karakteristikK = -15.0026 + 9.9965i -15.0026 - 9.9965i -1.8124 + 0.5883i -1.8124 - 0.5883iKRITERIA ROUTH Routh-Hurwitz Array 1.0000e+000 4.3740e+002 1.1800e+003 3.3630e+001 1.2870e+003 0 3.9913e+002 1.1800e+003 0 1.1876e+003 0 0 1.1800e+003 0 0System is stable KRITERIA HURWITZ 1.0e+010 * 0.0000 0.0000 0.0016 1.8810System is stable
2.15Diagram Tempat Kedudukan Akar dengan Pengendali a. Proporsional Integral Diferensial (PID)
Fungsi : -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180program :
% Diagram tempat kedudukan akar dengan pengendalinum = [-5.374 63.42 687.4 1180];den = [1 33.63 437.4 1287 1180];sys = tf(num,den)% diagram kedudukan akarrlocus(num,den);v = [-15 0 -15 15]axis (v);grid on
hasil :
Transfer function: -5.374 s^3 + 63.42 s^2 + 687.4 s + 1180
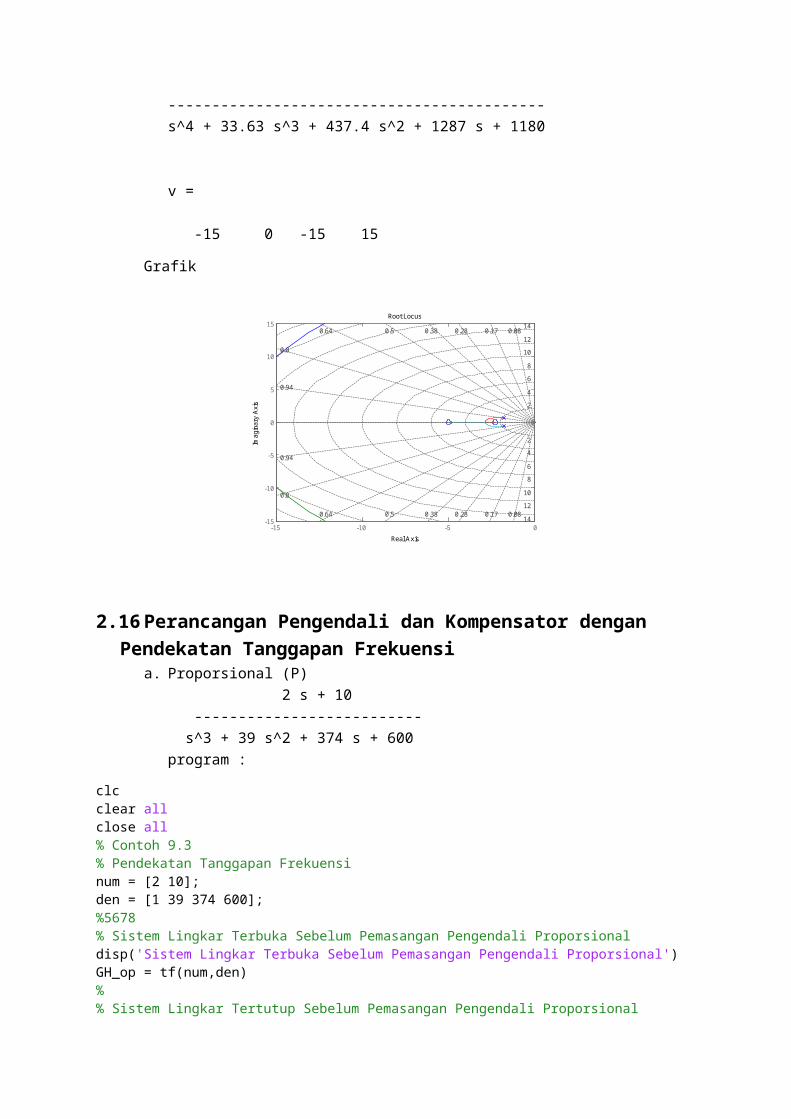
-------------------------------------------s^4 + 33.63 s^3 + 437.4 s^2 + 1287 s + 1180
v =
-15 0 -15 15
Grafik
-15 -10 -5 0-15
-10
-5
0
5
10
15
0.170.280.380.50.64
0.8
0.94
2468101214
2468101214
0.080.170.280.380.50.64
0.8
0.94
0.08
Root Locus
Real Axis
Imagina
ry Axis
2.16Perancangan Pengendali dan Kompensator dengan Pendekatan Tanggapan Frekuensi
a. Proporsional (P) 2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600 program :
clcclear allclose all% Contoh 9.3% Pendekatan Tanggapan Frekuensi num = [2 10]; den = [1 39 374 600];%5678% Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional')GH_op = tf(num,den)%% Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional
disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsionaldisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional')damp(GH_cl)%% Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Pengendali Proporsional[numopen,denopen,dencl]= Pengendali_P_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsionaldisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsionaldisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional')damp(T)
% Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah % Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Pengendali Proporsionaldisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional')% w = 0 :0.1 : 1000;[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali Proporsionalfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah Pemasangan Pengendali Proporsionalfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional')subplot(212)t1 = 0:0.0001:20.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional')%% Diagram Bode Sebelum dan Sesudah Pemasangan Pengendali Proporsionalfiguresubplot(211)margin(num,den)grid on
subplot(212)margin(numopen,denopen)grid on
hasil :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional
y1 =
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional
Eigenvalue Damping Freq. (rad/s)
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional
y2 =
GainMargin: Inf
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 1
Bandwidth = 2.35
Sistem Sebelum Pemasangan Pengendali Proporsional
Gain Margin = 9.22e+005 Gain crossover w = NaN
Phase Margin = Inf Phase crossover w = 1.36e+003
Konstanta Kp -> 1
Gain Margin dan Phase Margins Setelah Pemasangan Pengendali Proporsional
Gain Margin = 9.22e+005 Gain crossover w = NaN
Phase Margin = Inf Phase crossover w = 1.36e+003
Bandwidth = 2.39
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional
Eigenvalue Damping Freq. (rad/s)
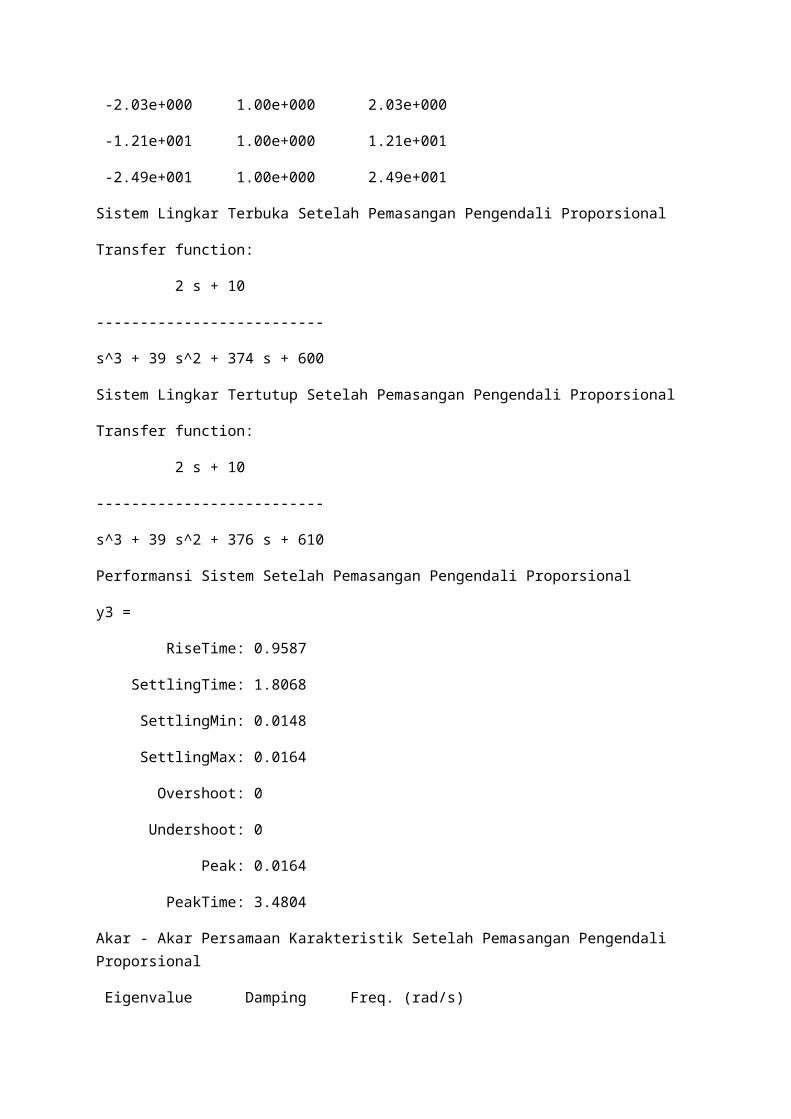
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Setelah Pemasangan Pengendali Proporsional
y3 =
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional
Eigenvalue Damping Freq. (rad/s)
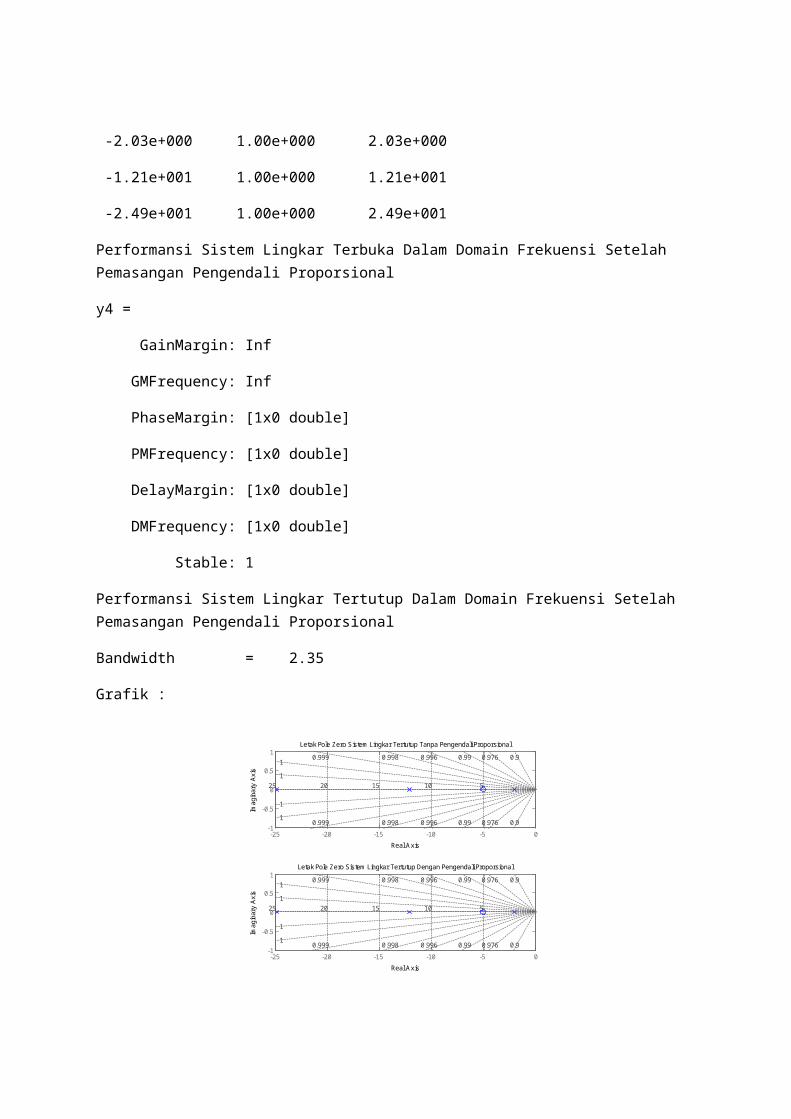
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional
y4 =
GainMargin: Inf
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional
Bandwidth = 2.35
Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional
Real Axis
Imagina
ry Axis
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional
Real Axis
Imagina
ry Axis
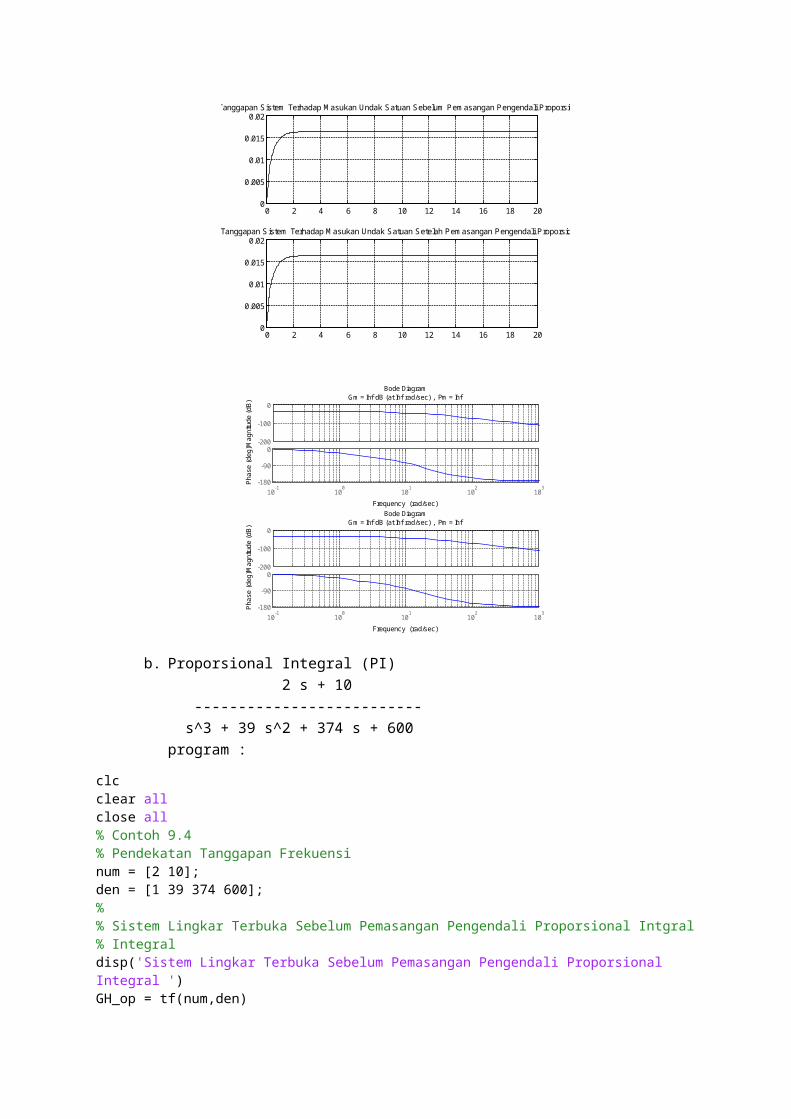
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
b. Proporsional Integral (PI) 2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600 program :
clcclear allclose all% Contoh 9.4 % Pendekatan Tanggapan Frekuensi num = [2 10]; den = [1 39 374 600];% % Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Intgral% Integral disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral ')GH_op = tf(num,den)
%% Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integraldisp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali% Proporsional Integraldisp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Integral')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Integraldisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral')damp(GH_cl) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Pengendali Proporsional Integraldisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Pengendali Proporsional Integraldisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Pengendali Proporsional Integral[numopen,denopen,dencl]= Pengendali_PI_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integraldisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integraldisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral
disp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Integraldisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral')damp(T) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah % Pemasangan Pengendali Proporsional Integraldisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Pengendali Proporsional Integraldisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral')% w = 0 :0.1 : 1000;[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Integralfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Integralfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Integral')subplot(212)t1 = 0:0.0001:20.00; [y1,x1,t1] = step(numopen,dencl,t1);
plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Integral')%% Diagram Bode Sebelum dan Sesudah Pemasangan Pengendali Proporsional Integralfiguresubplot(211)margin(num,den)grid on subplot(212)margin(numopen,denopen)grid on
hasil :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Integral
y1 =
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral
Eigenvalue Damping Freq. (rad/s)
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral
y2 =
GainMargin: Inf
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral
Bandwidth = 2.35
Nilai Phase Margin Diinginkan -> 45
Agar Pengendali Stabil Nilai Gain Crossover
Nilai Frekuensi wgc Harus Berada Antara 2.66e-015 dan 35.5
Nilai wgc -> 0.0000001
Sistem Sebelum Pemasangan Pengendali Proporsional Integral
Gain Margin = 9.22e+005 Gain crossover w = NaN
Phase Margin = Inf Phase crossover w = 1.36e+003
Fungsi Alih Pengendali
Gc = -42.4264 + 4.24264e-006/s
Sistem Setelah Pemasangan Pengendali Proporsional Integral
Gain Margin = 1.39 Gain crossover w = NaN
Phase Margin = Inf Phase crossover w = 0.123
Bandwidth = 0.512
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral
Eigenvalue Damping Freq. (rad/s)
-2.41e-007 1.00e+000 2.41e-007
-6.67e-001 1.00e+000 6.67e-001
-8.98e+000 1.00e+000 8.98e+000
-2.94e+001 1.00e+000 2.94e+001
Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
---------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
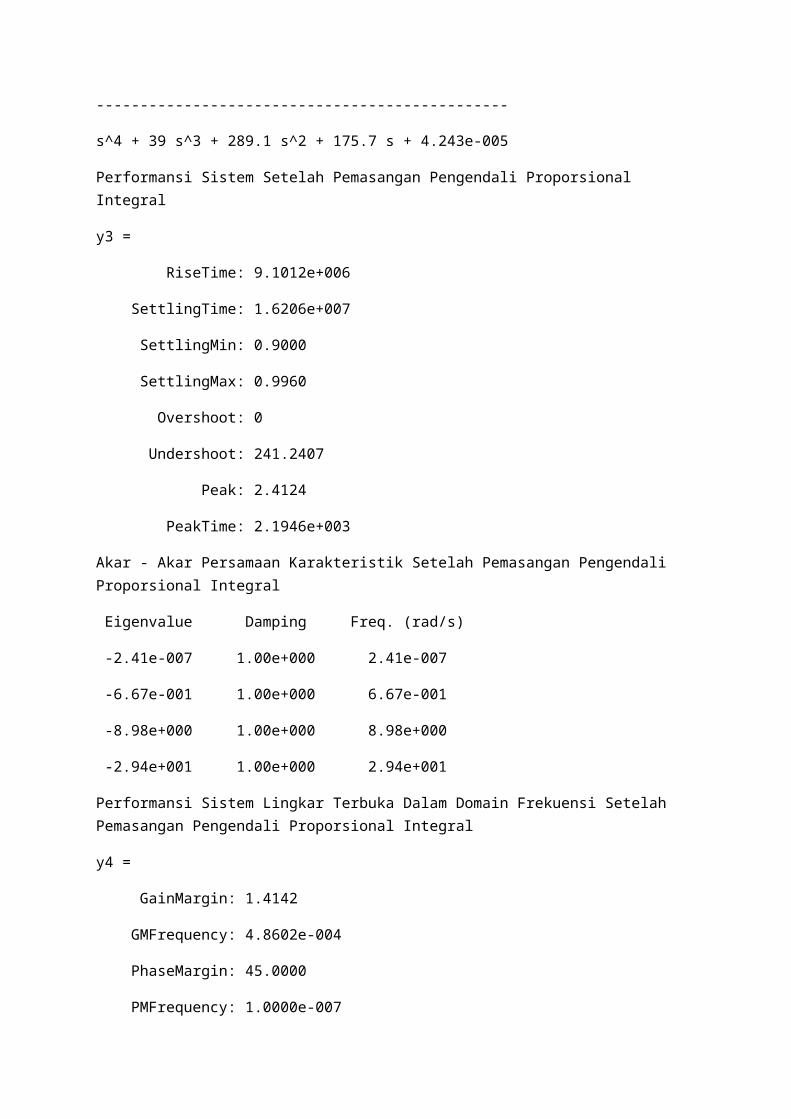
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral
y3 =
RiseTime: 9.1012e+006
SettlingTime: 1.6206e+007
SettlingMin: 0.9000
SettlingMax: 0.9960
Overshoot: 0
Undershoot: 241.2407
Peak: 2.4124
PeakTime: 2.1946e+003
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral
Eigenvalue Damping Freq. (rad/s)
-2.41e-007 1.00e+000 2.41e-007
-6.67e-001 1.00e+000 6.67e-001
-8.98e+000 1.00e+000 8.98e+000
-2.94e+001 1.00e+000 2.94e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral
y4 =
GainMargin: 1.4142
GMFrequency: 4.8602e-004
PhaseMargin: 45.0000
PMFrequency: 1.0000e-007
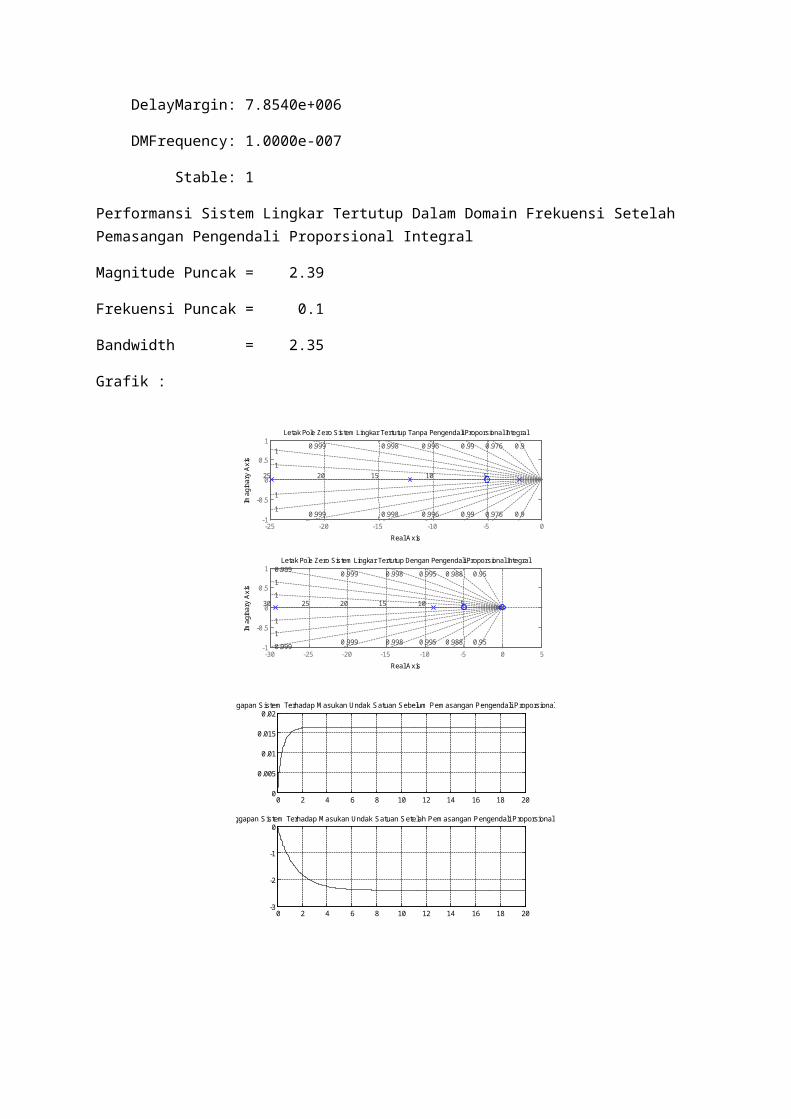
DelayMargin: 7.8540e+006
DMFrequency: 1.0000e-007
Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral
Magnitude Puncak = 2.39
Frekuensi Puncak = 0.1
Bandwidth = 2.35
Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral
Real Axis
Imagina
ry Axis
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral
Real Axis
Imagina
ry Axis
-30 -25 -20 -15 -10 -5 0 5-1
-0.5
0
0.5
1 0.950.9880.9950.9980.9990.99911
0.950.9880.9950.9980.9990.99911
51015202530
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Integral
0 2 4 6 8 10 12 14 16 18 20-3
-2
-1
0Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Integral
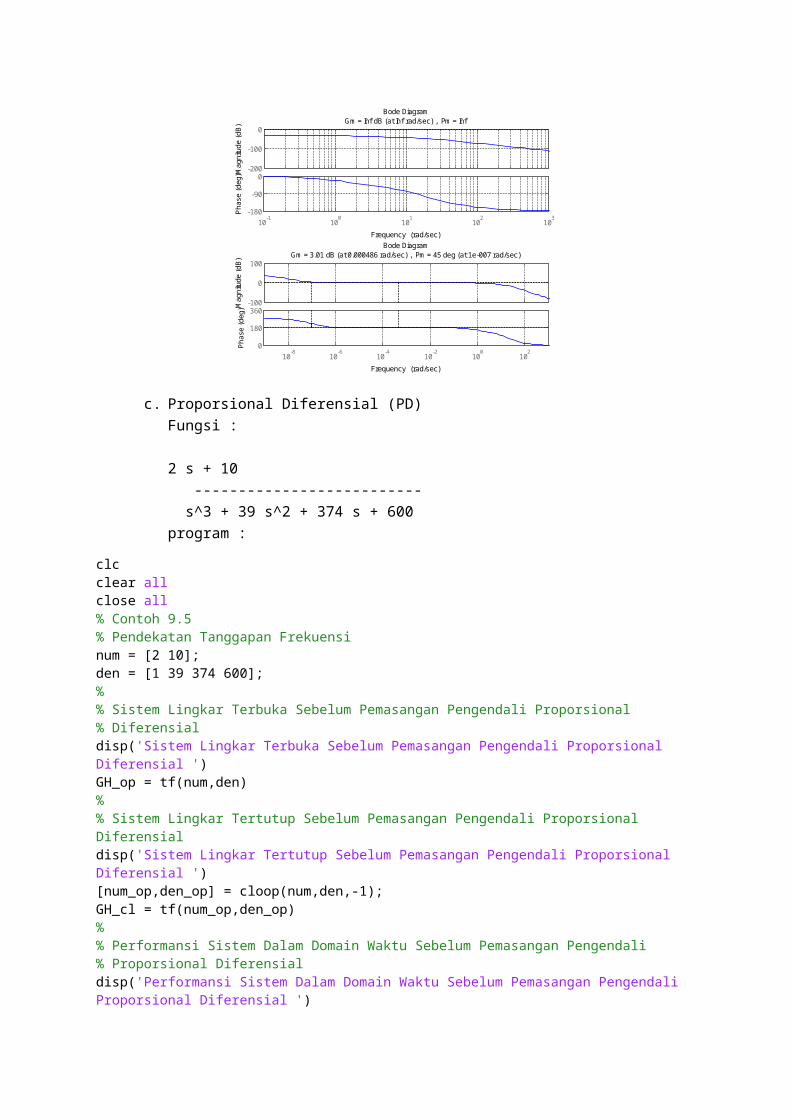
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
-100
0
100
Magnitude (dB)
10-8 10-6 10-4 10-2 100 1020
180
360
Phase (deg)
Bode DiagramGm = 3.01 dB (at 0.000486 rad/sec) , Pm = 45 deg (at 1e-007 rad/sec)
Frequency (rad/sec)
c. Proporsional Diferensial (PD)Fungsi :
2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600 program :
clcclear allclose all% Contoh 9.5 % Pendekatan Tanggapan Frekuensi num = [2 10]; den = [1 39 374 600];% % Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional% Diferensial disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Diferensial ')GH_op = tf(num,den)%% Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Diferensial disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Diferensial ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali% Proporsional Diferensial disp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Diferensial ')
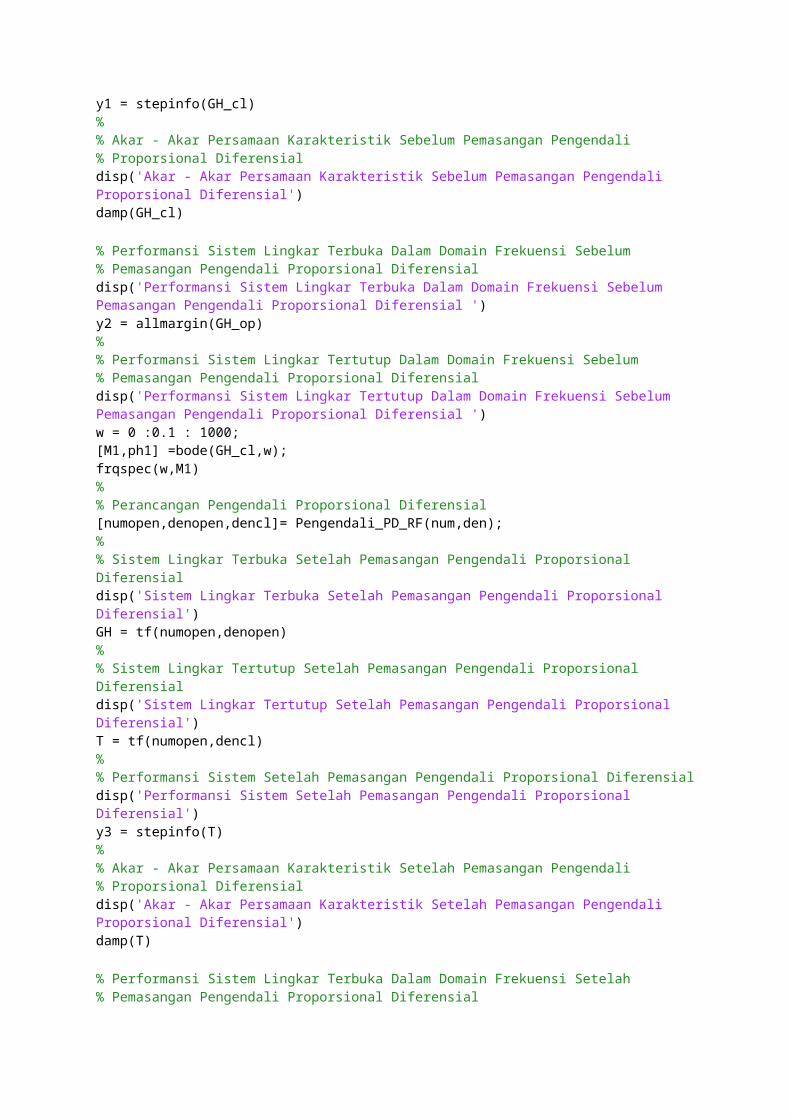
y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Diferensialdisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Diferensial')damp(GH_cl) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Pengendali Proporsional Diferensial disp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Diferensial ')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Pengendali Proporsional Diferensial disp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Diferensial ')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Pengendali Proporsional Diferensial[numopen,denopen,dencl]= Pengendali_PD_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Diferensialdisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Diferensial')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Diferensialdisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Diferensial')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensialdisp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensial')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Diferensialdisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial')damp(T) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah % Pemasangan Pengendali Proporsional Diferensial
disp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Diferensial')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Pengendali Proporsional Diferensialdisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Diferensial')[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Diferensialfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Diferensial')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Diferensial')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Diferensialfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Diferensial')subplot(212)t1 = 0:0.0001:5.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Diferensial')%% Diagram Bode Sebelum dan Sesudah Pemasangan Pengendali Proporsional Diferensialfiguresubplot(211)margin(num,den)grid on subplot(212)margin(numopen,denopen)
grid on
hasil :Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Diferensial Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Diferensial
y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Diferensial y2 = GainMargin: Inf GMFrequency: Inf
PhaseMargin: [1x0 double] PMFrequency: [1x0 double] DelayMargin: [1x0 double] DMFrequency: [1x0 double] Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Diferensial Bandwidth = 2.35
Nilai Phase Margin Diinginkan -> 45Agar Pengendali Stabil Nilai Gain Crossover Nilai Frekuensi wgc Harus Berada Antara 39.4 dan 390Nilai wgc -> 39.3Sistem Sebelum Pemasangan Pengendali Proporsional Diferensial Gain Margin = 9.22e+005 Gain crossover w = NaNPhase Margin = Inf Phase crossover w = 1.36e+003
Fungsi Alih Pengendali Gc = 950.544 + -0.0439808s
Sistem Setelah Pemasangan Pengendali Proporsional Diferensial Gain Margin = 352 Gain crossover w = 39.3Phase Margin = 45 Phase crossover w = 818Magnitude Puncak = 1.31Frekuensi Puncak = 39Bandwidth = 63Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -4.79e+000 1.00e+000 4.79e+000 -1.71e+001 + 4.27e+001i 3.71e-001 4.59e+001 -1.71e+001 - 4.27e+001i 3.71e-001 4.59e+001 Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Diferensial Transfer function:-0.08796 s^2 + 1901 s + 9505---------------------------- s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Diferensial Transfer function: -0.08796 s^2 + 1901 s + 9505------------------------------------s^3 + 38.91 s^2 + 2275 s + 1.011e004 Performansi Sistem Setelah Pemasangan Pengendali Proporsional Diferensialy3 =
RiseTime: 0.0323 SettlingTime: 0.1921 SettlingMin: 0.8466 SettlingMax: 1.1659 Overshoot: 23.9471 Undershoot: 0 Peak: 1.1659 PeakTime: 0.0738
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Diferensial Eigenvalue Damping Freq. (rad/s) -4.79e+000 1.00e+000 4.79e+000 -1.71e+001 + 4.27e+001i 3.71e-001 4.59e+001 -1.71e+001 - 4.27e+001i 3.71e-001 4.59e+001 Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Diferensialy4 =
GainMargin: 386.5392 GMFrequency: 857.3501 PhaseMargin: 45.0010 PMFrequency: 39.2990 DelayMargin: 0.0200 DMFrequency: 39.2990 Stable: 1
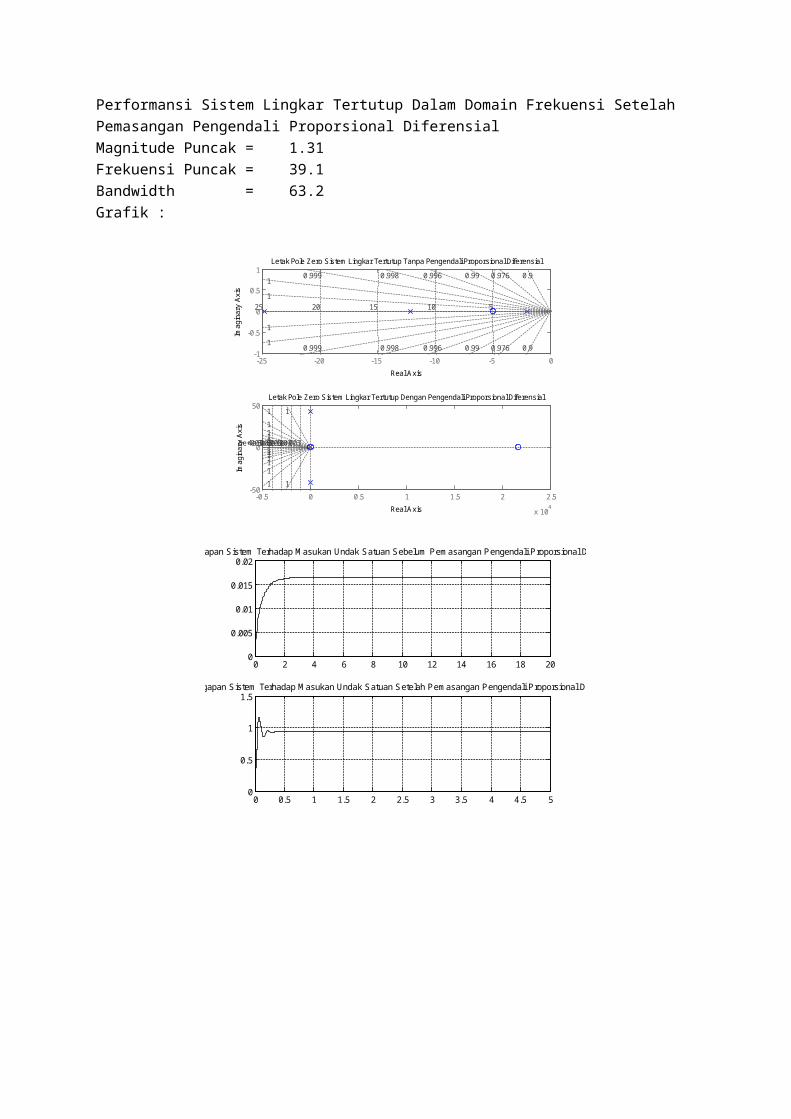
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional DiferensialMagnitude Puncak = 1.31Frekuensi Puncak = 39.1Bandwidth = 63.2Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Diferensial
Real Axis
Imagina
ry Axis
-0.5 0 0.5 1 1.5 2 2.5x 104
-50
0
50 11111111
11111111
1e+0032e+0033e+0034e+0035e+003
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Diferensial
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Diferensial
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Diferensial
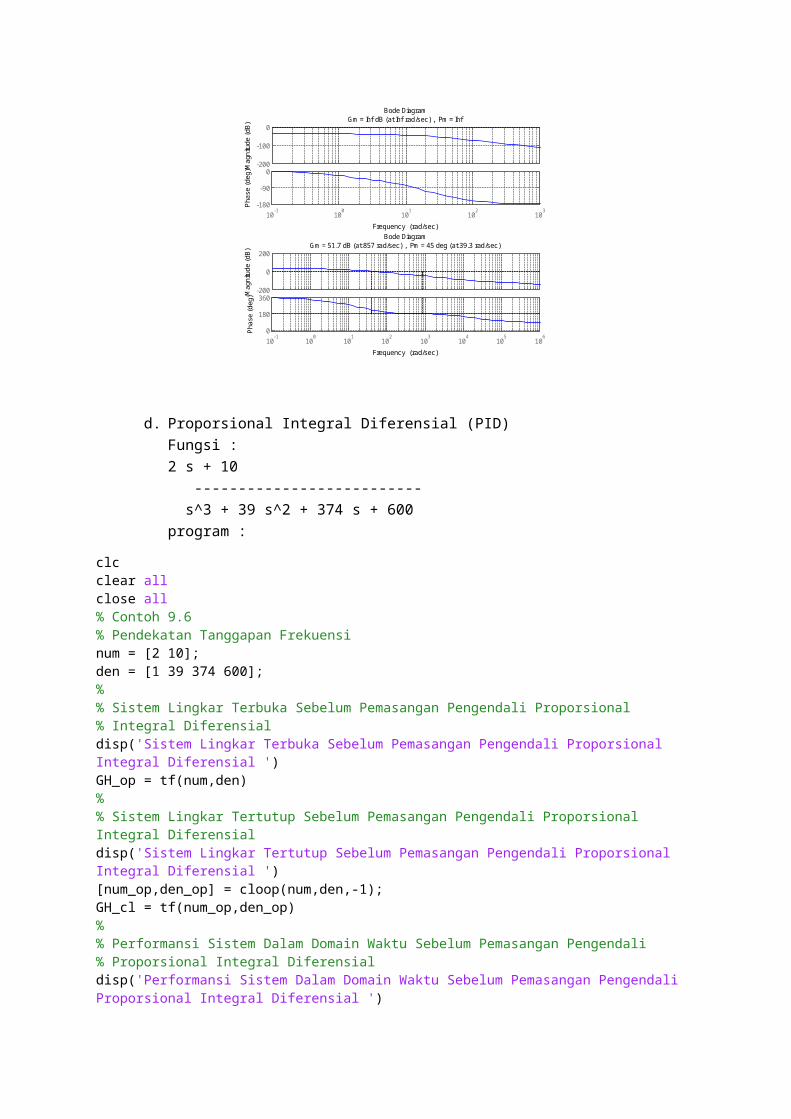
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
-200
0
200Magnitude (dB)
10-1 100 101 102 103 104 105 1060
180
360
Phase (deg)
Bode DiagramGm = 51.7 dB (at 857 rad/sec) , Pm = 45 deg (at 39.3 rad/sec)
Frequency (rad/sec)
d. Proporsional Integral Diferensial (PID)Fungsi :2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600 program :
clcclear allclose all% Contoh 9.6 % Pendekatan Tanggapan Frekuensi num = [2 10]; den = [1 39 374 600];% % Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional% Integral Diferensial disp('Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')GH_op = tf(num,den)%% Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Diferensial disp('Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali% Proporsional Integral Diferensial disp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')
y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali% Proporsional Integral Diferensial disp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral Diferensial')damp(GH_cl) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Pengendali Proporsional Integral Diferensial disp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Pengendali Proporsional Integral Diferensial disp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral Diferensial ')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Pengendali Proporsional Integral Diferensial[numopen,denopen,dencl]= Pengendali_PID_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Diferensialdisp('Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Diferensial')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Diferensialdisp('Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Diferensial')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensialdisp('Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali% Proporsional Integral Diferensialdisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Diferensial')damp(T) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah
% Pemasangan Pengendali Proporsional Integral Diferensialdisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral Diferensial')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Pengendali Proporsional Integral Diferensialdisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral Diferensial')[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Pengendali% Proporsional Integral Diferensialfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral Diferensial')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral Diferensial')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah% Pemasangan Pengendali Proporsional Integral Diferensialfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Pengendali Proporsional Integral Diferensial')subplot(212)t1 = 0:0.0001:5.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Pengendali Proporsional Integral Diferensial')%% Diagram Bode Sebelum dan Sesudah Pemasangan Pengendali Proporsional Integral Diferensialfiguresubplot(211)margin(num,den)grid on subplot(212)
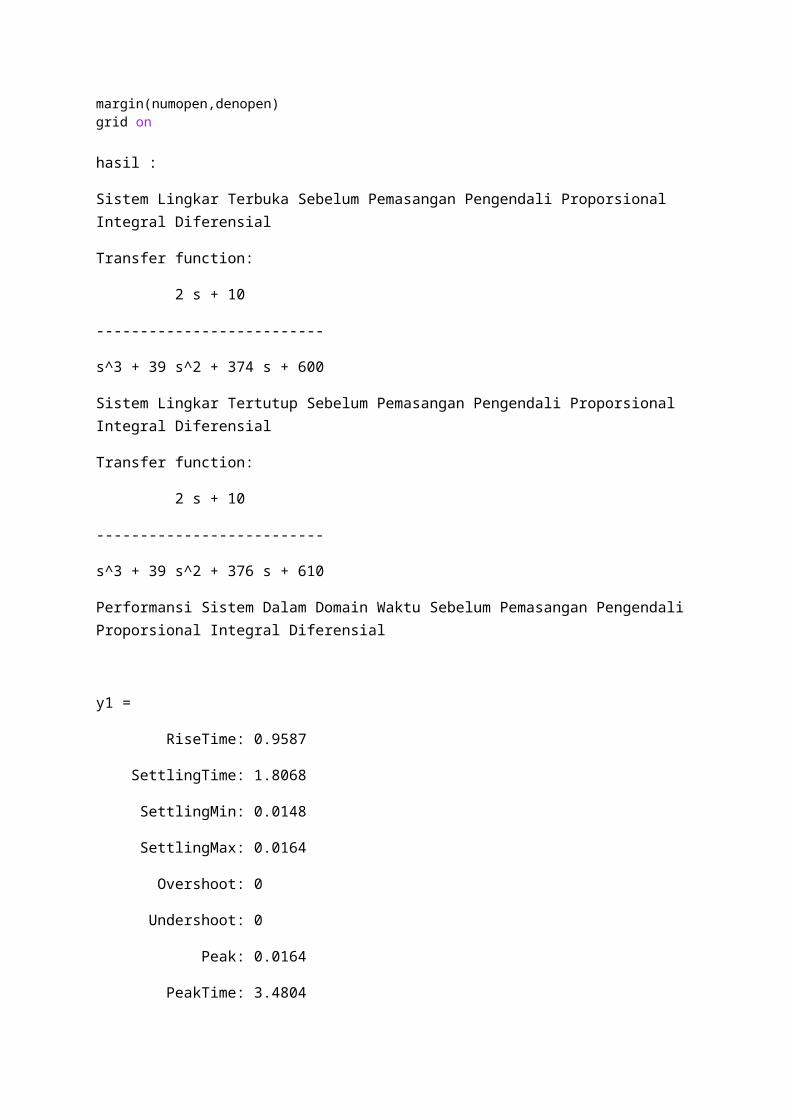
margin(numopen,denopen)grid on
hasil :
Sistem Lingkar Terbuka Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
y1 =
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
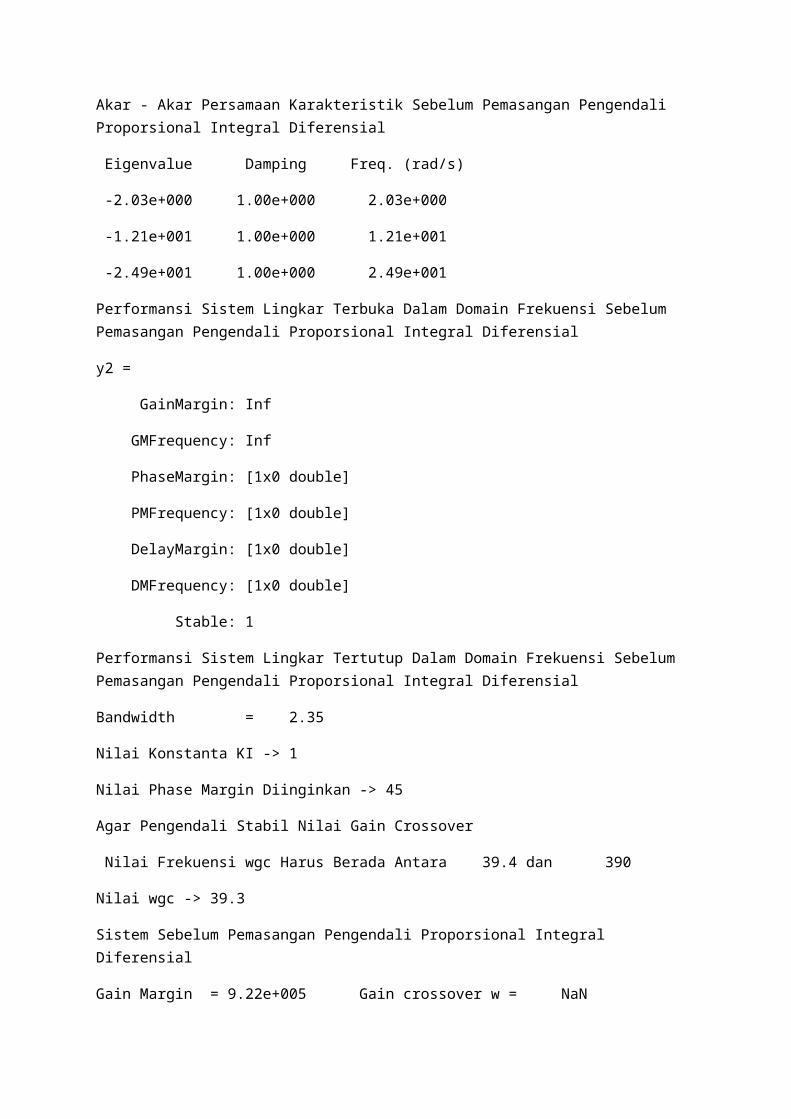
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Eigenvalue Damping Freq. (rad/s)
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
y2 =
GainMargin: Inf
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Bandwidth = 2.35
Nilai Konstanta KI -> 1
Nilai Phase Margin Diinginkan -> 45
Agar Pengendali Stabil Nilai Gain Crossover
Nilai Frekuensi wgc Harus Berada Antara 39.4 dan 390
Nilai wgc -> 39.3
Sistem Sebelum Pemasangan Pengendali Proporsional Integral Diferensial
Gain Margin = 9.22e+005 Gain crossover w = NaN
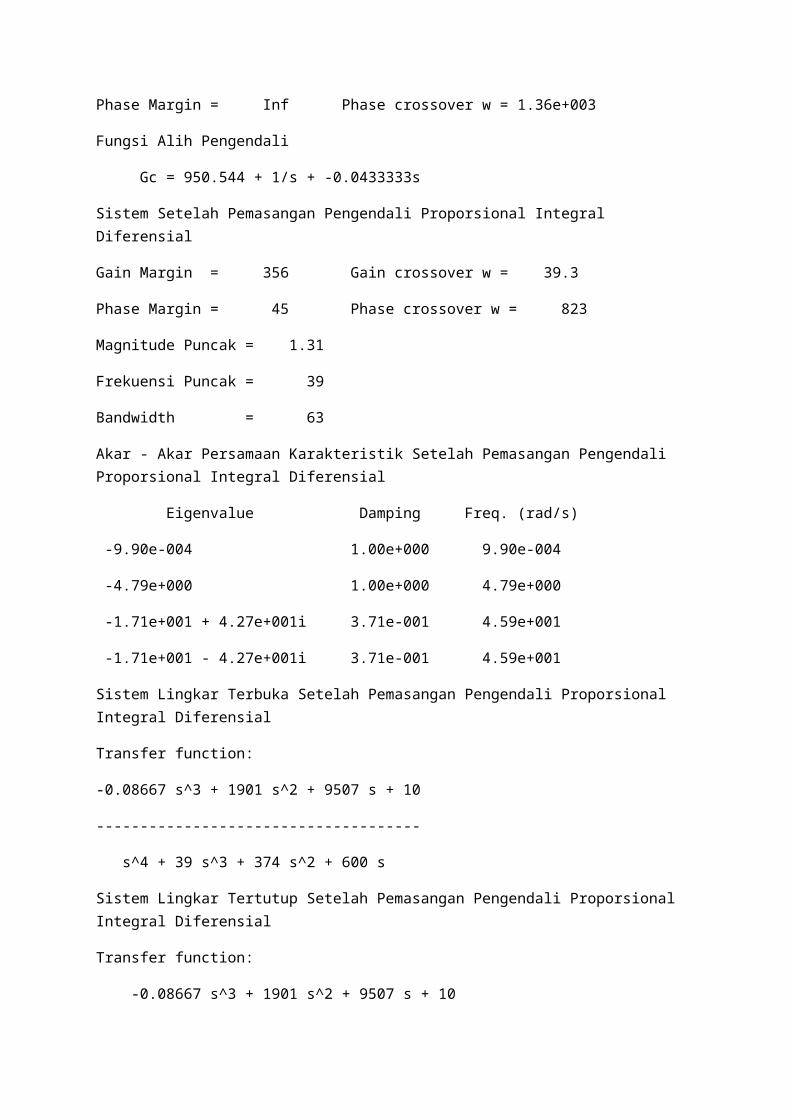
Phase Margin = Inf Phase crossover w = 1.36e+003
Fungsi Alih Pengendali
Gc = 950.544 + 1/s + -0.0433333s
Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Gain Margin = 356 Gain crossover w = 39.3
Phase Margin = 45 Phase crossover w = 823
Magnitude Puncak = 1.31
Frekuensi Puncak = 39
Bandwidth = 63
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Eigenvalue Damping Freq. (rad/s)
-9.90e-004 1.00e+000 9.90e-004
-4.79e+000 1.00e+000 4.79e+000
-1.71e+001 + 4.27e+001i 3.71e-001 4.59e+001
-1.71e+001 - 4.27e+001i 3.71e-001 4.59e+001
Sistem Lingkar Terbuka Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Transfer function:
-0.08667 s^3 + 1901 s^2 + 9507 s + 10
-------------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
Sistem Lingkar Tertutup Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Transfer function:
-0.08667 s^3 + 1901 s^2 + 9507 s + 10
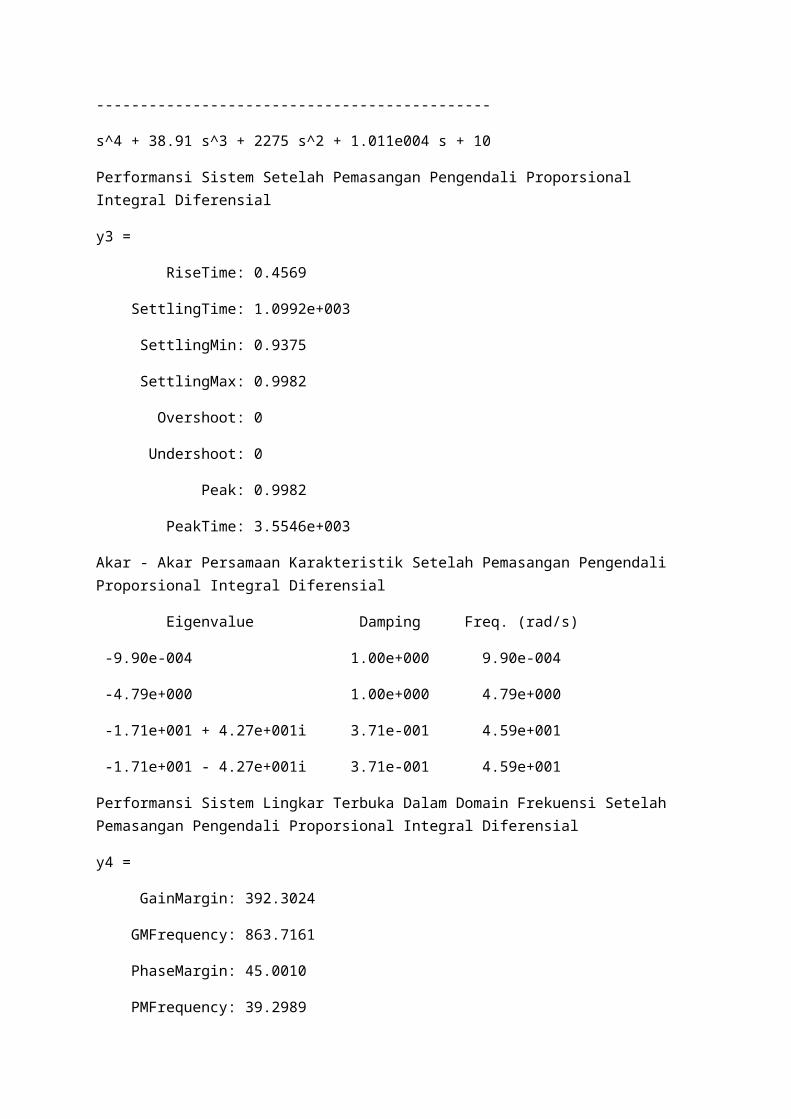
---------------------------------------------
s^4 + 38.91 s^3 + 2275 s^2 + 1.011e004 s + 10
Performansi Sistem Setelah Pemasangan Pengendali Proporsional Integral Diferensial
y3 =
RiseTime: 0.4569
SettlingTime: 1.0992e+003
SettlingMin: 0.9375
SettlingMax: 0.9982
Overshoot: 0
Undershoot: 0
Peak: 0.9982
PeakTime: 3.5546e+003
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Eigenvalue Damping Freq. (rad/s)
-9.90e-004 1.00e+000 9.90e-004
-4.79e+000 1.00e+000 4.79e+000
-1.71e+001 + 4.27e+001i 3.71e-001 4.59e+001
-1.71e+001 - 4.27e+001i 3.71e-001 4.59e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral Diferensial
y4 =
GainMargin: 392.3024
GMFrequency: 863.7161
PhaseMargin: 45.0010
PMFrequency: 39.2989
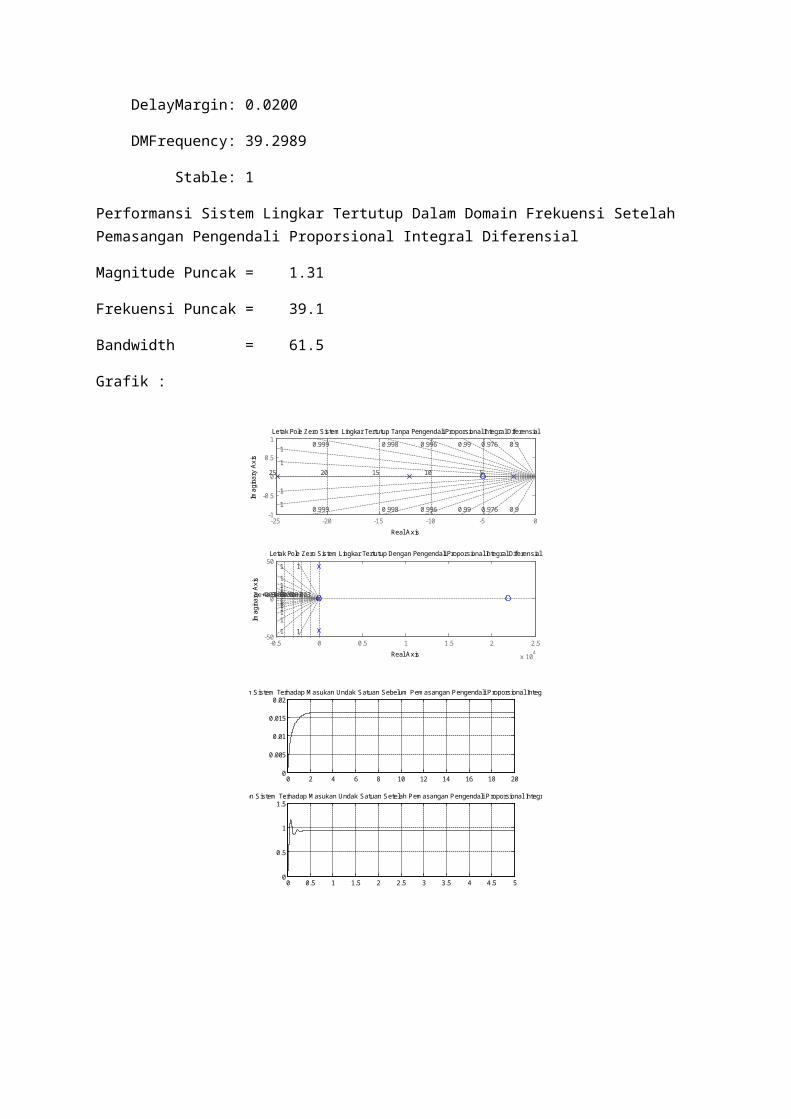
DelayMargin: 0.0200
DMFrequency: 39.2989
Stable: 1
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Pengendali Proporsional Integral Diferensial
Magnitude Puncak = 1.31
Frekuensi Puncak = 39.1
Bandwidth = 61.5
Grafik :
-25 -20 -15 -10 -5 0-1
-0.5
0
0.5
1 0.90.9760.990.9960.9980.99911
0.90.9760.990.9960.9980.99911
510152025
Letak Pole Zero Sistem Lingkar Tertutup Tanpa Pengendali Proporsional Integral Diferensial
Real Axis
Imagina
ry Axis
-0.5 0 0.5 1 1.5 2 2.5x 104
-50
0
50 11111111
11111111
1e+0032e+0033e+0034e+0035e+003
Letak Pole Zero Sistem Lingkar Tertutup Dengan Pengendali Proporsional Integral Diferensial
Real Axis
Imagina
ry Axis
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Pengendali Proporsional Integral Diferensial
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Pengendali Proporsional Integral Diferensial
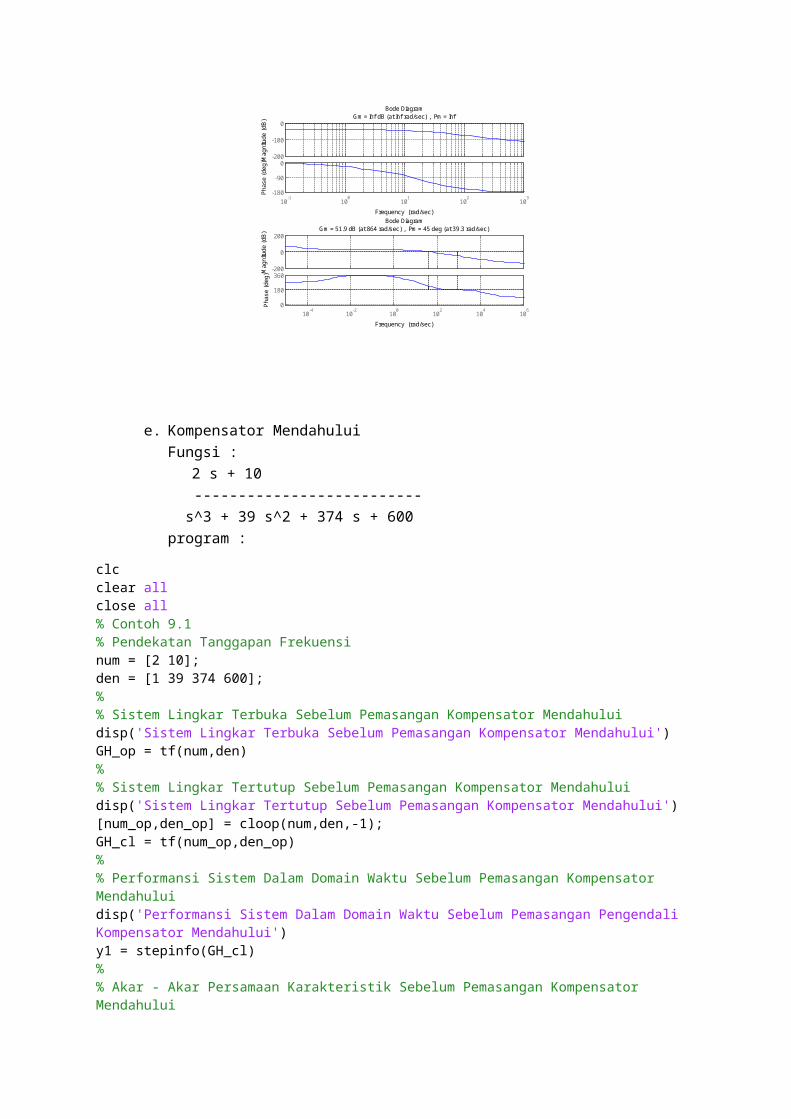
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
-200
0
200
Magnitude (dB)
10-4 10-2 100 102 104 1060
180
360Phase (deg)
Bode DiagramGm = 51.9 dB (at 864 rad/sec) , Pm = 45 deg (at 39.3 rad/sec)
Frequency (rad/sec)
e. Kompensator Mendahului Fungsi :
2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600 program :
clcclear allclose all% Contoh 9.1% Pendekatan Tanggapan Frekuensi num = [2 10]; den = [1 39 374 600];%% Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Mendahului')GH_op = tf(num,den)%% Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Mendahului')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Kompensator Mendahului')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului
disp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului')damp(GH_cl) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Mendahului')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Kompensator Mendahului disp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Mendahului')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Kompensator Mendahului [numopen,denopen,dencl]=Kompensator_Lead_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahului ')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahuluidisp('Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahului ')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Setelah Pemasangan Kompensator Mendahului')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahuluidisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahului')damp(T) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah % Pemasangan Kompensator Mendahuluidisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Kompensator Mendahului')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Kompensator Mendahului
disp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Kompensator Mendahului')% w = 0 :0.1 : 1000;[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Kompensator Mendahuluifiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Kompensator Mendahului')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Kompensator Mendahului')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah Pemasangan Kompensator Mendahuluifiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Kompensator Mendahului')subplot(212)t1 = 0:0.0001:5.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Kompensator Mendahului')%% Diagram Bode Sebelum dan Sesudah Pemasangan Kompensator Mendahuluifiguresubplot(211)margin(num,den)grid on subplot(212)margin(numopen,denopen)grid on
hasil :Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Mendahului
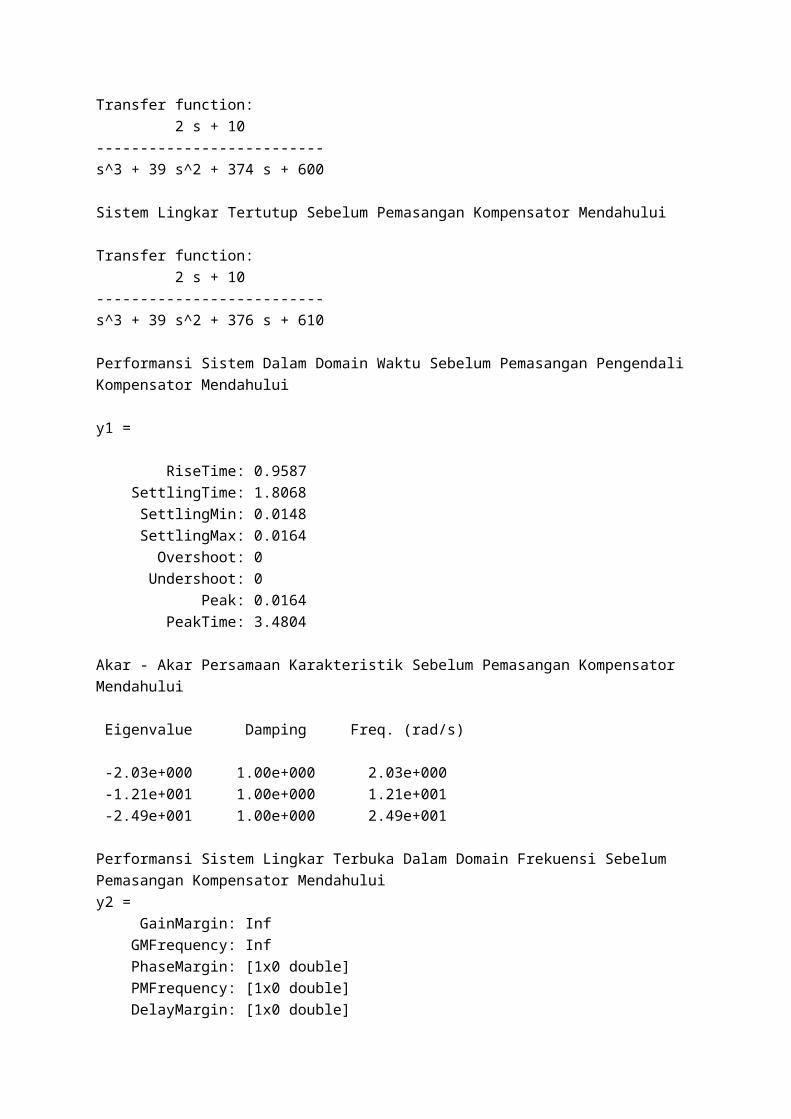
Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 374 s + 600 Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Mendahului Transfer function: 2 s + 10--------------------------s^3 + 39 s^2 + 376 s + 610 Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Kompensator Mendahului
y1 =
RiseTime: 0.9587 SettlingTime: 1.8068 SettlingMin: 0.0148 SettlingMax: 0.0164 Overshoot: 0 Undershoot: 0 Peak: 0.0164 PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Mendahului Eigenvalue Damping Freq. (rad/s) -2.03e+000 1.00e+000 2.03e+000 -1.21e+001 1.00e+000 1.21e+001 -2.49e+001 1.00e+000 2.49e+001 Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Mendahuluiy2 = GainMargin: Inf GMFrequency: Inf PhaseMargin: [1x0 double] PMFrequency: [1x0 double] DelayMargin: [1x0 double]
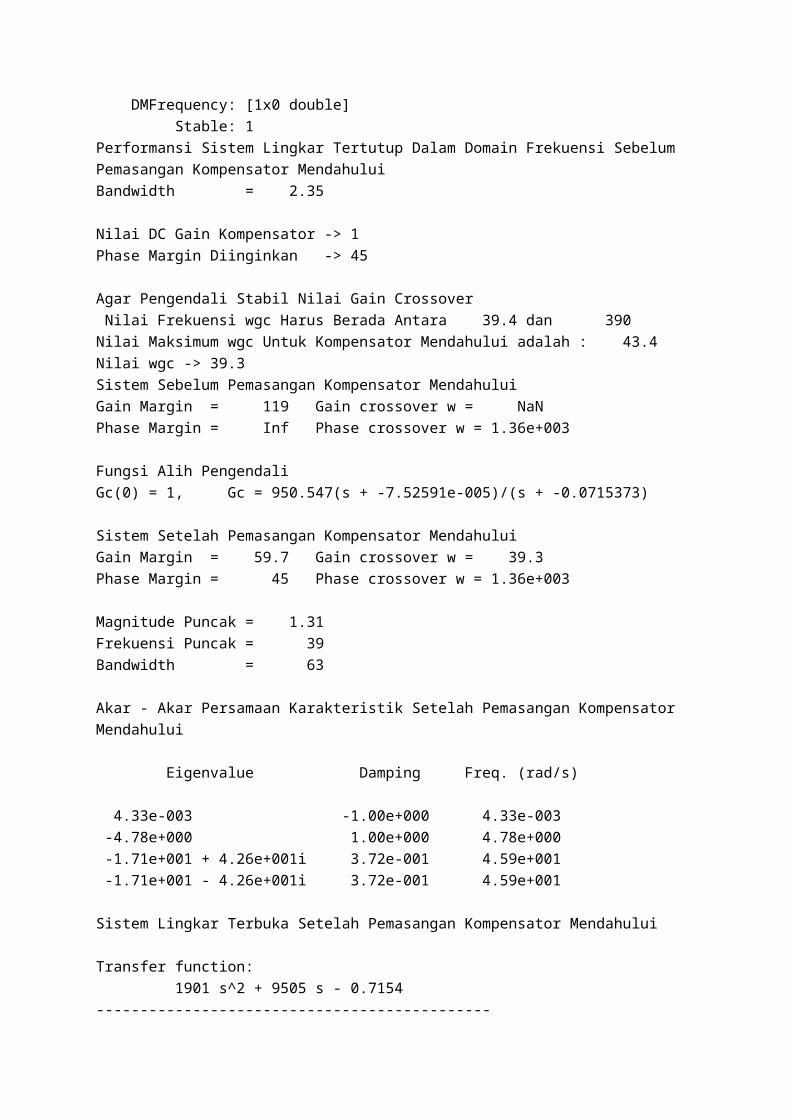
DMFrequency: [1x0 double] Stable: 1Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Kompensator MendahuluiBandwidth = 2.35
Nilai DC Gain Kompensator -> 1Phase Margin Diinginkan -> 45
Agar Pengendali Stabil Nilai Gain Crossover Nilai Frekuensi wgc Harus Berada Antara 39.4 dan 390Nilai Maksimum wgc Untuk Kompensator Mendahului adalah : 43.4Nilai wgc -> 39.3Sistem Sebelum Pemasangan Kompensator Mendahului Gain Margin = 119 Gain crossover w = NaNPhase Margin = Inf Phase crossover w = 1.36e+003
Fungsi Alih Pengendali Gc(0) = 1, Gc = 950.547(s + -7.52591e-005)/(s + -0.0715373)
Sistem Setelah Pemasangan Kompensator Mendahului Gain Margin = 59.7 Gain crossover w = 39.3Phase Margin = 45 Phase crossover w = 1.36e+003
Magnitude Puncak = 1.31Frekuensi Puncak = 39Bandwidth = 63
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahului Eigenvalue Damping Freq. (rad/s) 4.33e-003 -1.00e+000 4.33e-003 -4.78e+000 1.00e+000 4.78e+000 -1.71e+001 + 4.26e+001i 3.72e-001 4.59e+001 -1.71e+001 - 4.26e+001i 3.72e-001 4.59e+001 Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Mendahului Transfer function: 1901 s^2 + 9505 s - 0.7154---------------------------------------------
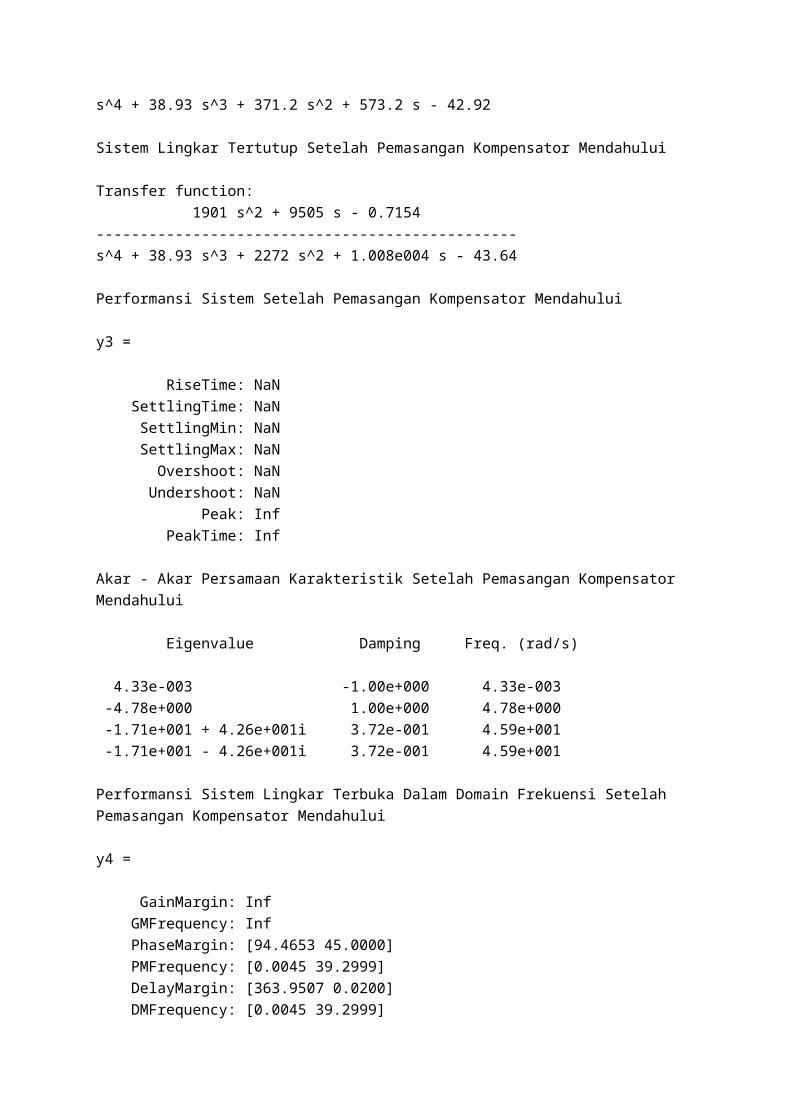
s^4 + 38.93 s^3 + 371.2 s^2 + 573.2 s - 42.92 Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Mendahului Transfer function: 1901 s^2 + 9505 s - 0.7154------------------------------------------------s^4 + 38.93 s^3 + 2272 s^2 + 1.008e004 s - 43.64 Performansi Sistem Setelah Pemasangan Kompensator Mendahului
y3 =
RiseTime: NaN SettlingTime: NaN SettlingMin: NaN SettlingMax: NaN Overshoot: NaN Undershoot: NaN Peak: Inf PeakTime: Inf
Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Mendahului Eigenvalue Damping Freq. (rad/s) 4.33e-003 -1.00e+000 4.33e-003 -4.78e+000 1.00e+000 4.78e+000 -1.71e+001 + 4.26e+001i 3.72e-001 4.59e+001 -1.71e+001 - 4.26e+001i 3.72e-001 4.59e+001 Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Kompensator Mendahului
y4 =
GainMargin: Inf GMFrequency: Inf PhaseMargin: [94.4653 45.0000] PMFrequency: [0.0045 39.2999] DelayMargin: [363.9507 0.0200] DMFrequency: [0.0045 39.2999]
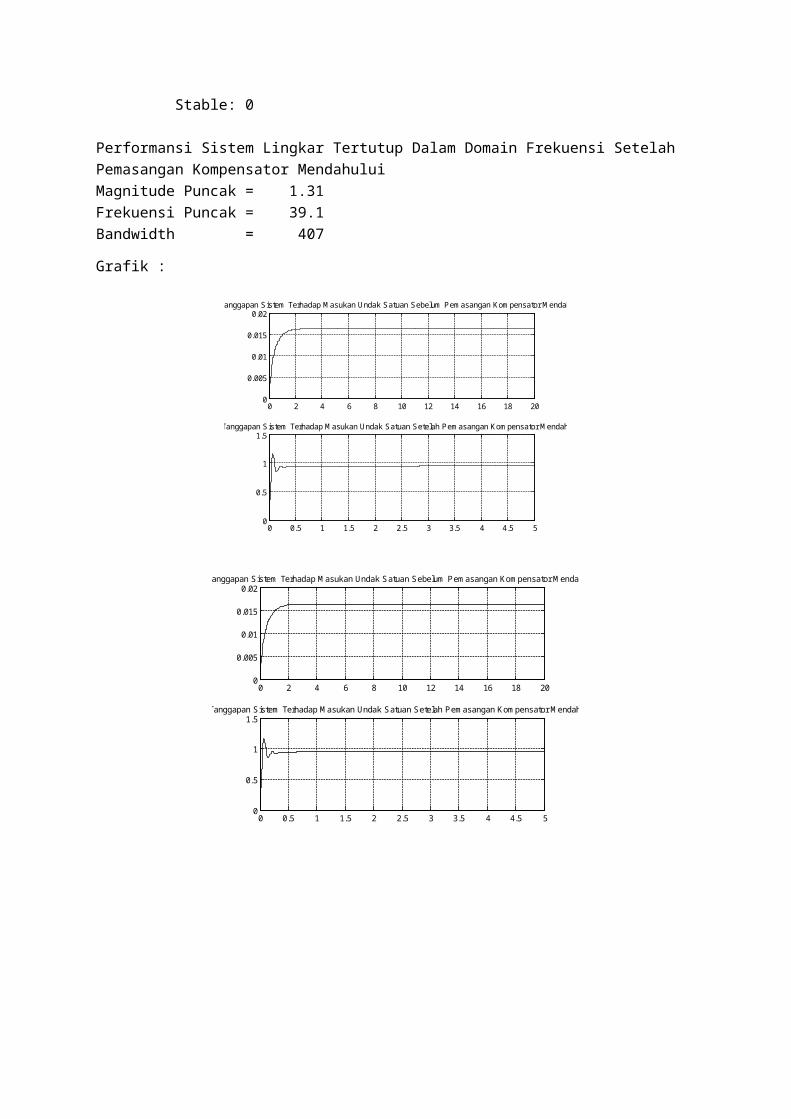
Stable: 0
Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Kompensator MendahuluiMagnitude Puncak = 1.31Frekuensi Puncak = 39.1Bandwidth = 407
Grafik :
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Kom pensator M endahului
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Kom pensator M endahului
0 2 4 6 8 10 12 14 16 18 200
0.005
0.01
0.015
0.02Tanggapan Sistem Terhadap M asukan Undak Satuan Sebelum Pem asangan Kom pensator M endahului
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5Tanggapan Sistem Terhadap M asukan Undak Satuan Setelah Pem asangan Kom pensator M endahului
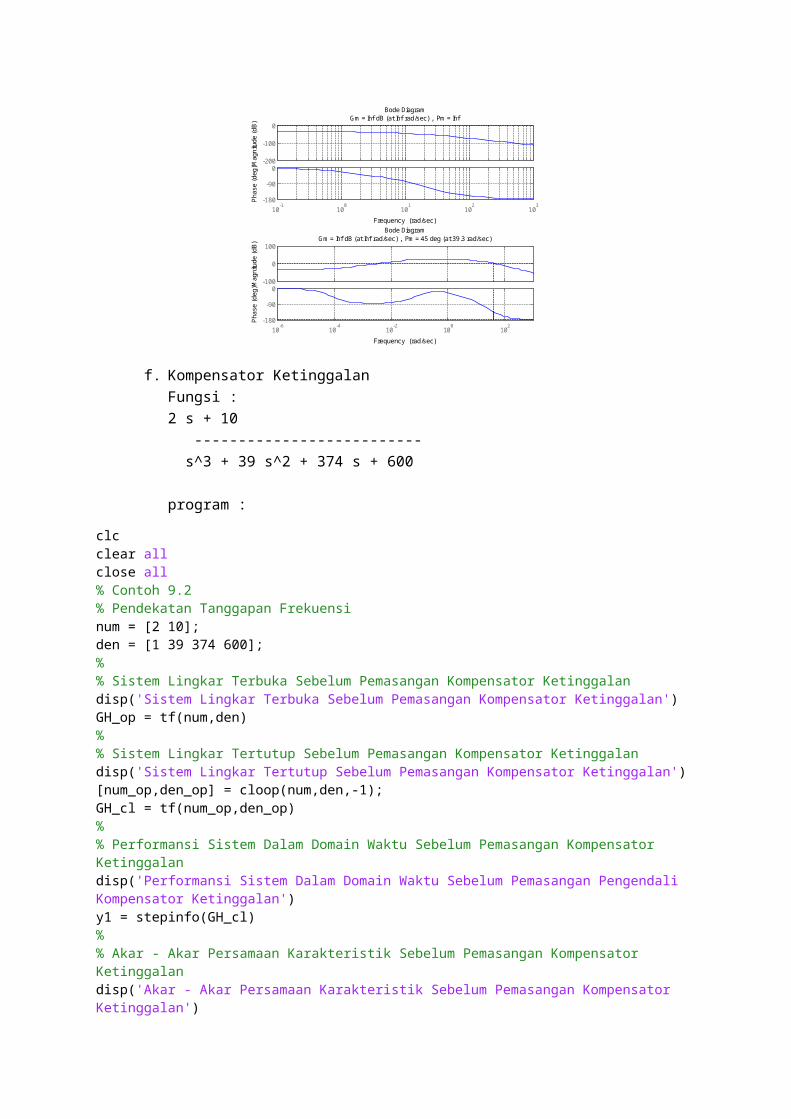
-200
-100
0
Magnitude (dB)
10-1 100 101 102 103-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = Inf
Frequency (rad/sec)
-100
0
100Magnitude (dB)
10-6 10-4 10-2 100 102-180
-90
0
Phase (deg)
Bode DiagramGm = Inf dB (at Inf rad/sec) , Pm = 45 deg (at 39.3 rad/sec)
Frequency (rad/sec)
f. Kompensator Ketinggalan Fungsi :2 s + 10 -------------------------- s^3 + 39 s^2 + 374 s + 600
program :
clcclear allclose all% Contoh 9.2% Pendekatan Tanggapan Frekuensinum = [2 10]; den = [1 39 374 600];%% Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Ketinggalandisp('Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Ketinggalan')GH_op = tf(num,den)%% Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Ketinggalandisp('Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Ketinggalan')[num_op,den_op] = cloop(num,den,-1);GH_cl = tf(num_op,den_op)%% Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Kompensator Ketinggalan')y1 = stepinfo(GH_cl)%% Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Ketinggalandisp('Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Ketinggalan')
damp(GH_cl) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum % Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Ketinggalan')y2 = allmargin(GH_op)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum% Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Ketinggalan')w = 0 :0.1 : 1000;[M1,ph1] =bode(GH_cl,w);frqspec(w,M1)%% Perancangan Kompensator Ketinggalan [numopen,denopen,dencl]=Kompensator_Lag_RF(num,den);%% Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Ketinggalandisp('Sistem Lingkar Terbuka Setelah Pemasangan Kompensator Ketinggalan ')GH = tf(numopen,denopen)%% Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Ketinggalandisp('Sistem Lingkar Tertutup Setelah Pemasangan Kompensator Ketinggalan ')T = tf(numopen,dencl)%% Performansi Sistem Setelah Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Setelah Pemasangan Kompensator Ketinggalan')y3 = stepinfo(T)%% Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Ketinggalandisp('Akar - Akar Persamaan Karakteristik Setelah Pemasangan Kompensator Ketinggalan')damp(T) % Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah % Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Setelah Pemasangan Kompensator Ketinggalan')y4 = allmargin(GH)%% Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah% Pemasangan Kompensator Ketinggalandisp('Performansi Sistem Lingkar Tertutup Dalam Domain Frekuensi Setelah Pemasangan Kompensator Ketinggalan')% w = 0 :0.1 : 1000;
[M2,ph2] =bode(T,w);frqspec(w,M2)%% Letak Pole Zero Sistem Lingkar Tertutup Tanpa dan Dengan Kompensator Ketinggalanfiguresubplot(211)pzmap(GH_cl)title('Letak Pole Zero Sistem Lingkar Tertutup Tanpa Kompensator Ketinggalan')grid on subplot(212)pzmap(T)title('Letak Pole Zero Sistem Lingkar Tertutup Dengan Kompensator Ketinggalan')grid on %% Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum dan Setelah Pemasangan Kompensator Ketinggalanfiguresubplot(211)t = 0:0.01:20.00; [y,x,t] = step(num_op,den_op,t);plot(t,y,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Sebelum Pemasangan Kompensator Ketinggalan')subplot(212)t1 = 0:0.0001:20.00; [y1,x1,t1] = step(numopen,dencl,t1);plot(t1,y1,'k-');grid ontitle('Tanggapan Sistem Terhadap Masukan Undak Satuan Setelah Pemasangan Kompensator Ketinggalan')%% Diagram Bode Sebelum dan Sesudah Pemasangan Kompensator Ketinggalanfiguresubplot(211)margin(num,den)grid on subplot(212)margin(numopen,denopen)grid on
hasil :
Sistem Lingkar Terbuka Sebelum Pemasangan Kompensator Ketinggalan
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 374 s + 600
Sistem Lingkar Tertutup Sebelum Pemasangan Kompensator Ketinggalan
Transfer function:
2 s + 10
--------------------------
s^3 + 39 s^2 + 376 s + 610
Performansi Sistem Dalam Domain Waktu Sebelum Pemasangan Pengendali Kompensator Ketinggalan
y1 =
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
Akar - Akar Persamaan Karakteristik Sebelum Pemasangan Kompensator Ketinggalan
Eigenvalue Damping Freq. (rad/s)
-2.03e+000 1.00e+000 2.03e+000
-1.21e+001 1.00e+000 1.21e+001
-2.49e+001 1.00e+000 2.49e+001
Performansi Sistem Lingkar Terbuka Dalam Domain Frekuensi Sebelum Pemasangan Kompensator Ketinggalan
y2 =
GainMargin: Inf
GMFrequency: Inf
PhaseMargin: [1x0 double]
PMFrequency: [1x0 double]
DelayMargin: [1x0 double]
DMFrequency: [1x0 double]
Stable: 1
Bandwidth = 2.35
Nilai DC Gain Kompensator -> 2
Phase Margin Diinginkan -> 45
2.17Performansi System Lingkar Terbuka dalam Domain Waktu dengan Pengendali
a. Proporsional (P)Fungsi alih :-84.85 s^2 - 424.3 s + 4.243e-005--------------------------------- s^4 + 39 s^3 + 374 s^2 + 600 sprogram :
% Kesalahan sistem %fungsi alihclcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 374 600 0];sys = tf(num,den)%display ('perhitungan konstanta kesalahan')errortf(num,den)step(num,den)grid onhasil :
Transfer function:
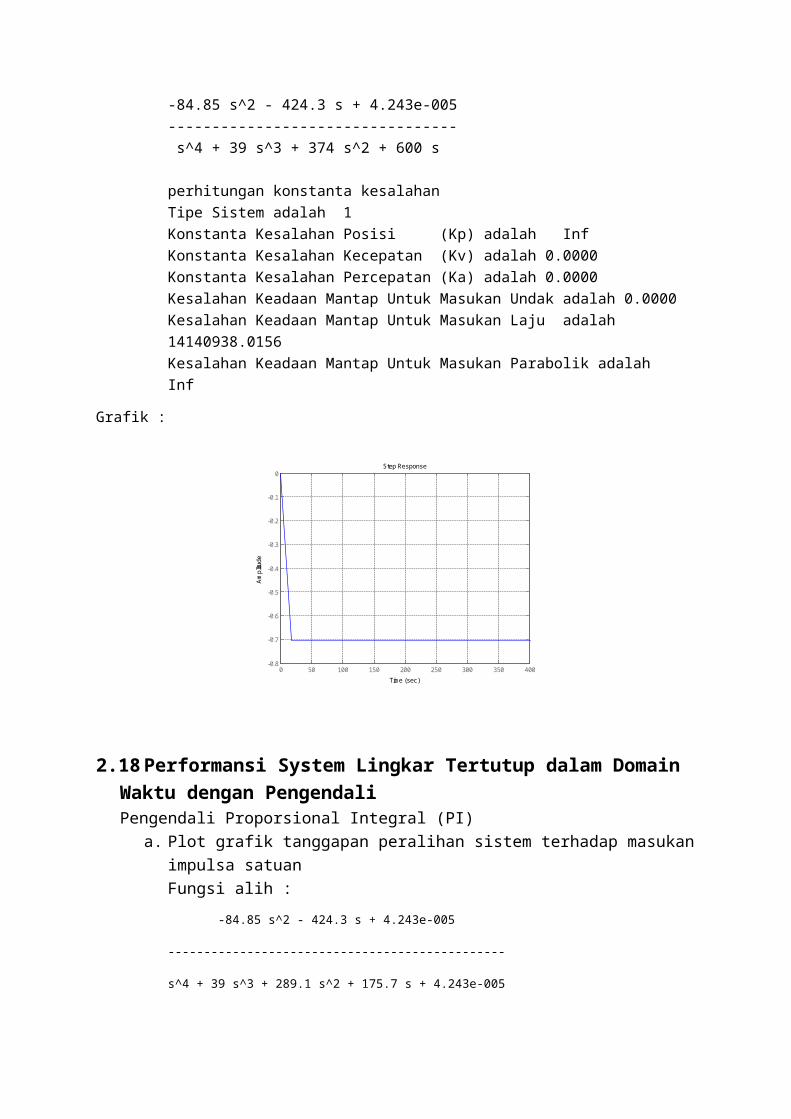
-84.85 s^2 - 424.3 s + 4.243e-005--------------------------------- s^4 + 39 s^3 + 374 s^2 + 600 s perhitungan konstanta kesalahanTipe Sistem adalah 1 Konstanta Kesalahan Posisi (Kp) adalah Inf Konstanta Kesalahan Kecepatan (Kv) adalah 0.0000 Konstanta Kesalahan Percepatan (Ka) adalah 0.0000 Kesalahan Keadaan Mantap Untuk Masukan Undak adalah 0.0000 Kesalahan Keadaan Mantap Untuk Masukan Laju adalah 14140938.0156 Kesalahan Keadaan Mantap Untuk Masukan Parabolik adalah Inf
Grafik :
0 50 100 150 200 250 300 350 400-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0Step Response
Time (sec)
Amplitude
2.18Performansi System Lingkar Tertutup dalam Domain Waktu dengan Pengendali Pengendali Proporsional Integral (PI)
a. Plot grafik tanggapan peralihan sistem terhadap masukanimpulsa satuan Fungsi alih : -84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
program :clcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 289.1 175.7 4.243e-005];sys = tf(num,den)y = stepinfo (tf(num,den))t = 0: 0.1 : 10;y = impulse(num,den ,t);plot (t,y, 'k-' )grid on%step(num,den)grid on
hasil :
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
y =
RiseTime: 9.0986e+006
SettlingTime: 1.6202e+007
SettlingMin: 0.9000
SettlingMax: 0.9960
Overshoot: 0
Undershoot: 241.3105
Peak: 2.4131
PeakTime: 2.1940e+003
Grafik :
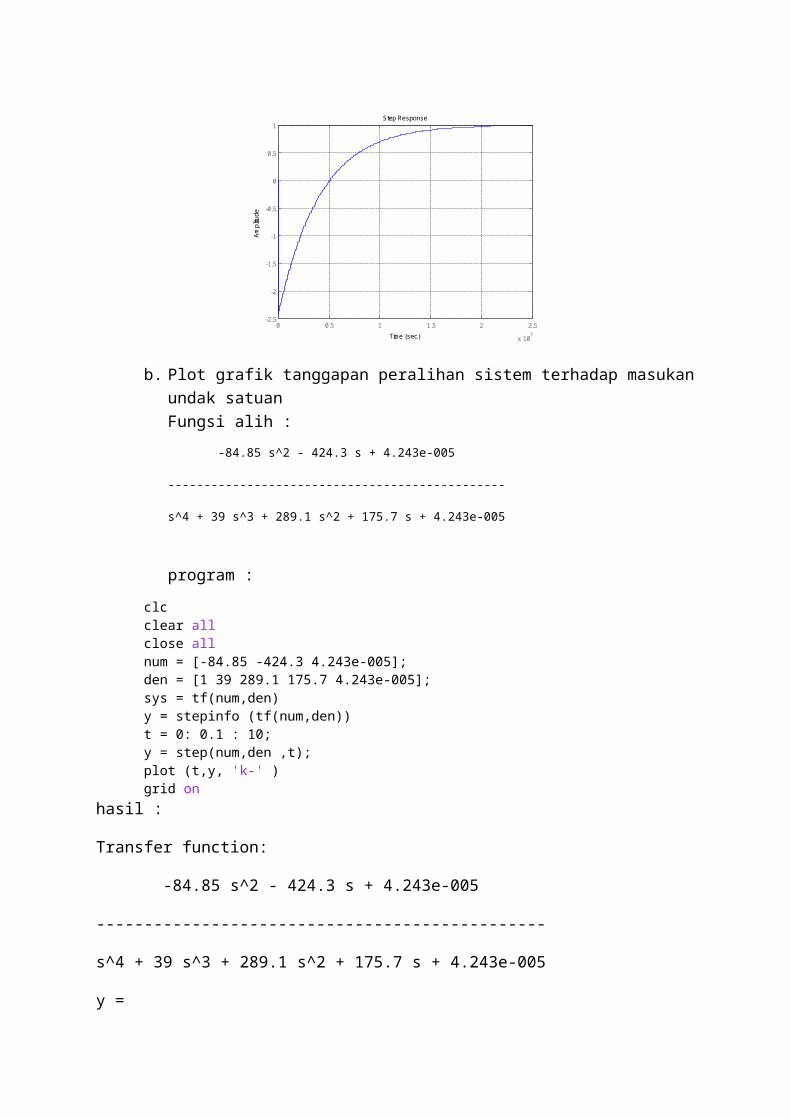
0 0.5 1 1.5 2 2.5x 107
-2.5
-2
-1.5
-1
-0.5
0
0.5
1Step Response
Time (sec)
Amplitude
b. Plot grafik tanggapan peralihan sistem terhadap masukanundak satuan Fungsi alih : -84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
program :clcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 289.1 175.7 4.243e-005];sys = tf(num,den)y = stepinfo (tf(num,den))t = 0: 0.1 : 10;y = step(num,den ,t);plot (t,y, 'k-' )grid on
hasil :
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
y =
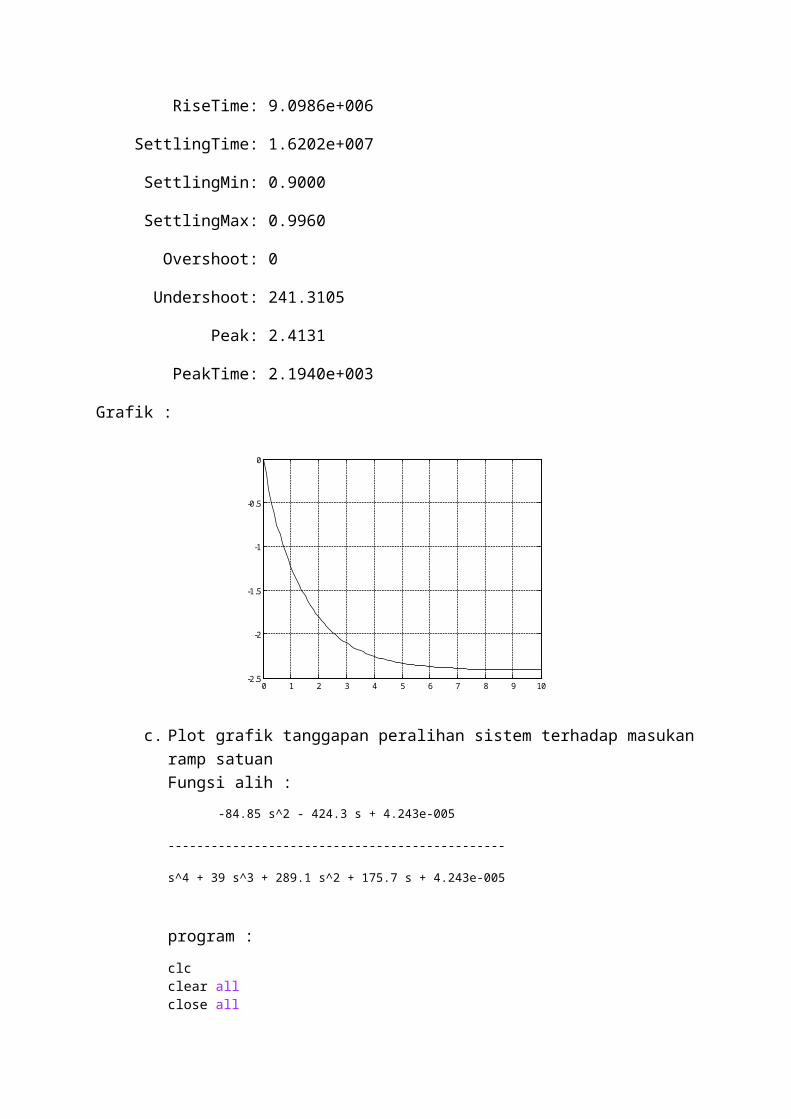
RiseTime: 9.0986e+006
SettlingTime: 1.6202e+007
SettlingMin: 0.9000
SettlingMax: 0.9960
Overshoot: 0
Undershoot: 241.3105
Peak: 2.4131
PeakTime: 2.1940e+003
Grafik :
0 1 2 3 4 5 6 7 8 9 10-2.5
-2
-1.5
-1
-0.5
0
c. Plot grafik tanggapan peralihan sistem terhadap masukanramp satuan Fungsi alih : -84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
program :clcclear allclose all
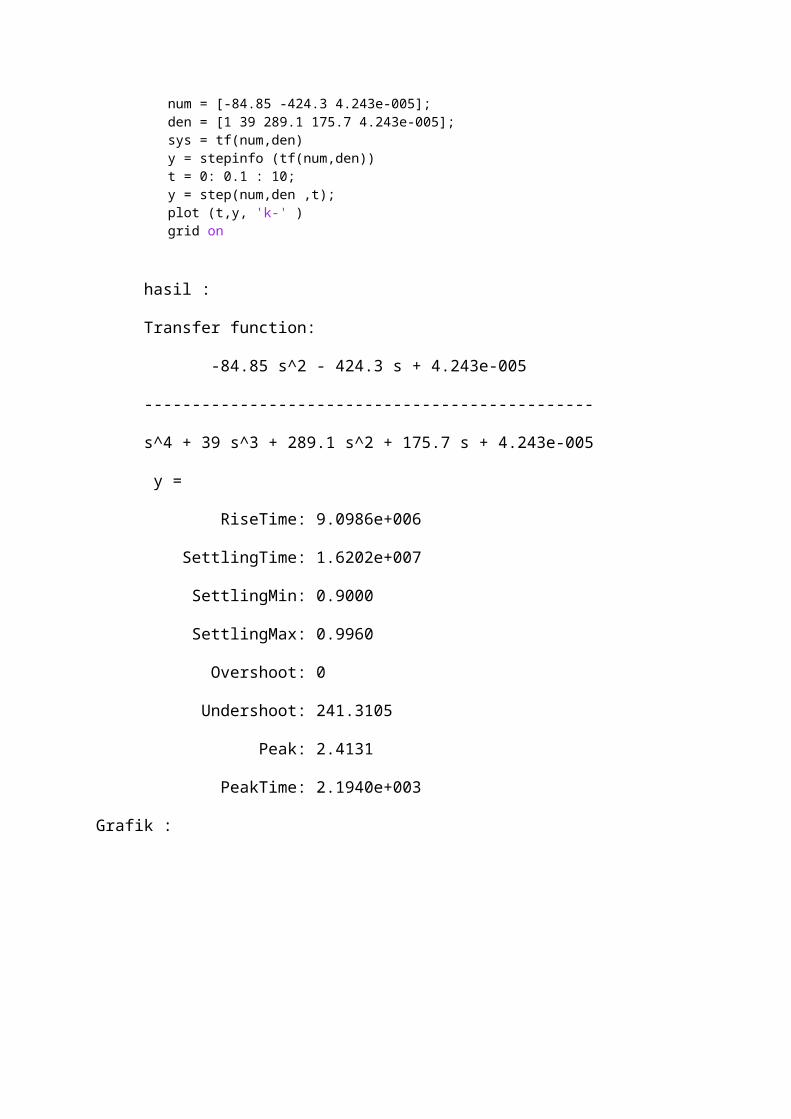
num = [-84.85 -424.3 4.243e-005];den = [1 39 289.1 175.7 4.243e-005];sys = tf(num,den)y = stepinfo (tf(num,den))t = 0: 0.1 : 10;y = step(num,den ,t);plot (t,y, 'k-' )grid on
hasil :
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
y =
RiseTime: 9.0986e+006
SettlingTime: 1.6202e+007
SettlingMin: 0.9000
SettlingMax: 0.9960
Overshoot: 0
Undershoot: 241.3105
Peak: 2.4131
PeakTime: 2.1940e+003
Grafik :
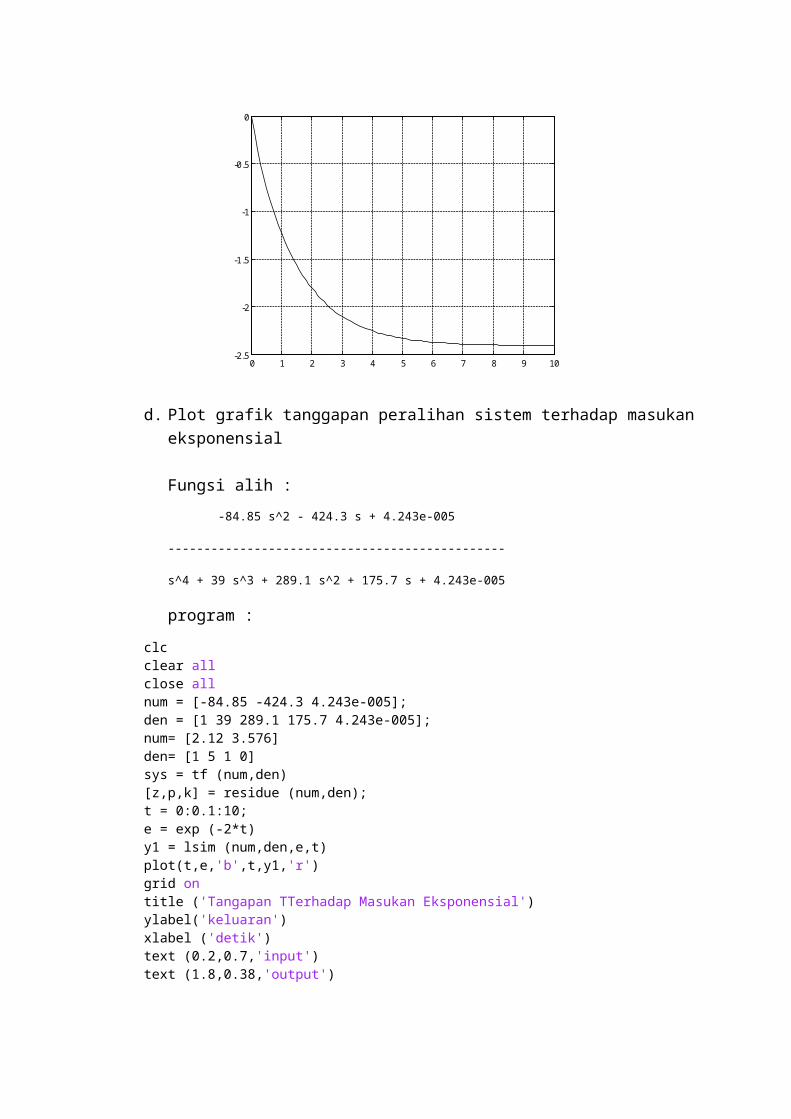
0 1 2 3 4 5 6 7 8 9 10-2.5
-2
-1.5
-1
-0.5
0
d. Plot grafik tanggapan peralihan sistem terhadap masukaneksponensial
Fungsi alih : -84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
program :clcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 289.1 175.7 4.243e-005];num= [2.12 3.576]den= [1 5 1 0]sys = tf (num,den)[z,p,k] = residue (num,den);t = 0:0.1:10;e = exp (-2*t)y1 = lsim (num,den,e,t)plot(t,e,'b',t,y1,'r')grid ontitle ('Tangapan TTerhadap Masukan Eksponensial')ylabel('keluaran')xlabel ('detik')text (0.2,0.7,'input')text (1.8,0.38,'output')
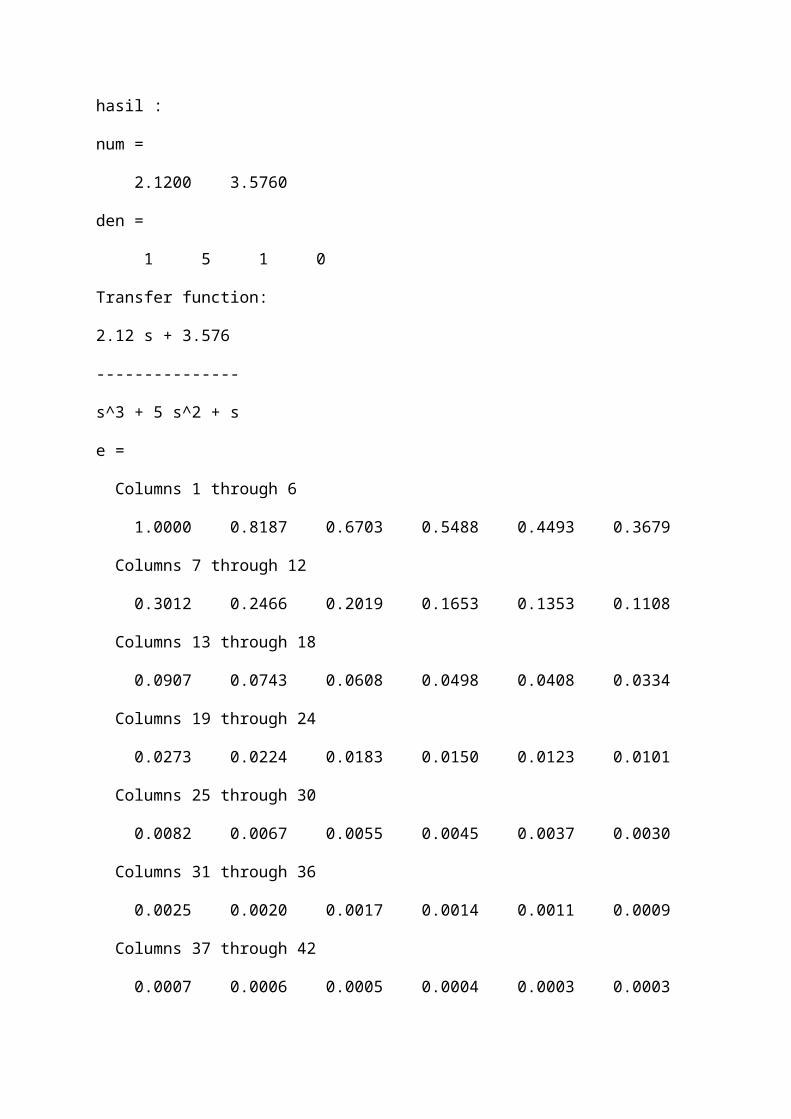
hasil :
num =
2.1200 3.5760
den =
1 5 1 0
Transfer function:
2.12 s + 3.576
---------------
s^3 + 5 s^2 + s
e =
Columns 1 through 6
1.0000 0.8187 0.6703 0.5488 0.4493 0.3679
Columns 7 through 12
0.3012 0.2466 0.2019 0.1653 0.1353 0.1108
Columns 13 through 18
0.0907 0.0743 0.0608 0.0498 0.0408 0.0334
Columns 19 through 24
0.0273 0.0224 0.0183 0.0150 0.0123 0.0101
Columns 25 through 30
0.0082 0.0067 0.0055 0.0045 0.0037 0.0030
Columns 31 through 36
0.0025 0.0020 0.0017 0.0014 0.0011 0.0009
Columns 37 through 42
0.0007 0.0006 0.0005 0.0004 0.0003 0.0003
Columns 43 through 48
0.0002 0.0002 0.0002 0.0001 0.0001 0.0001
Columns 49 through 54
0.0001 0.0001 0.0000 0.0000 0.0000 0.0000
Columns 55 through 60
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 61 through 66
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 67 through 72
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 73 through 78
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 79 through 84
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 85 through 90
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 91 through 96
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Columns 97 through 101
0.0000 0.0000 0.0000 0.0000 0.0000
y1 =
0 0.0090 0.0306 0.0593 0.0918
0.1260 0.1609 0.1956 0.2299 0.2636 0.2964 0.3285 0.3597 0.3902 0.4199 0.4489 0.4772 0.5048 0.5318 0.5581 0.5839 0.6091 0.6337 0.6578 0.6814 0.7045 0.7270 0.7491 0.7708 0.7919 0.8127 0.8330 0.8528 0.8723 0.8913 0.9100 0.9283 0.9461 0.9637 0.9808 0.9976 1.0141
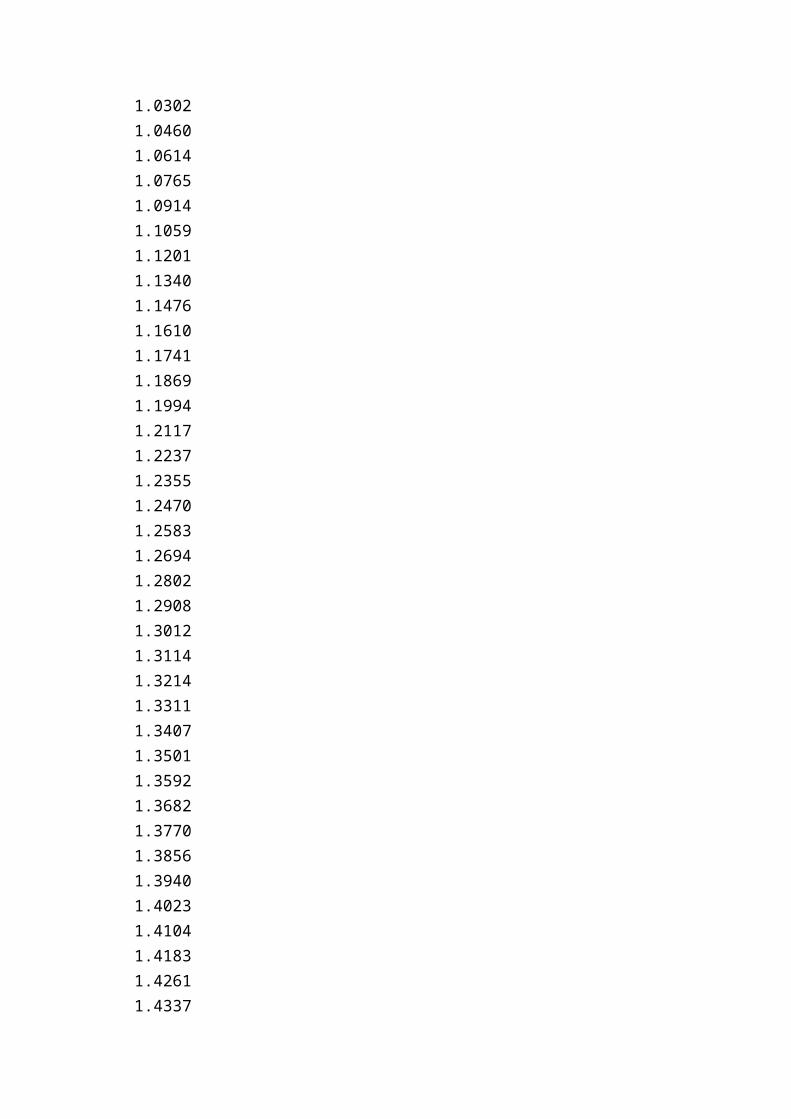
1.0302 1.0460 1.0614 1.0765 1.0914 1.1059 1.1201 1.1340 1.1476 1.1610 1.1741 1.1869 1.1994 1.2117 1.2237 1.2355 1.2470 1.2583 1.2694 1.2802 1.2908 1.3012 1.3114 1.3214 1.3311 1.3407 1.3501 1.3592 1.3682 1.3770 1.3856 1.3940 1.4023 1.4104 1.4183 1.4261 1.4337
1.4411 1.4484 1.4555 1.4625 1.4694 1.4761 1.4826 1.4891 1.4954 1.5015 1.5076 1.5135 1.5193 1.5250 1.5305 1.5360 1.5413 1.5465 1.5516 1.5566 1.5615 1.5663
Grafik :
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Tangapan TTerhadap M asukan Eksponensial
kelua
ran
detik
input
output
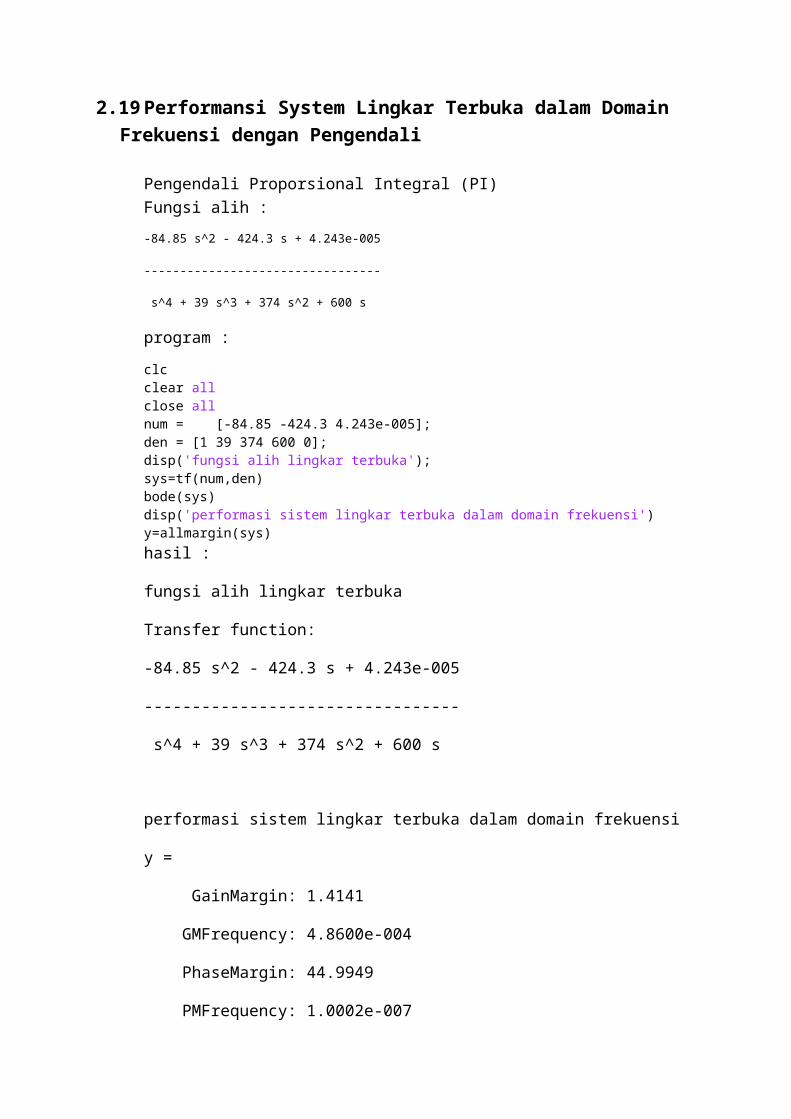
2.19Performansi System Lingkar Terbuka dalam Domain Frekuensi dengan Pengendali
Pengendali Proporsional Integral (PI) Fungsi alih :-84.85 s^2 - 424.3 s + 4.243e-005
---------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
program :clcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 374 600 0];disp('fungsi alih lingkar terbuka');sys=tf(num,den)bode(sys)disp('performasi sistem lingkar terbuka dalam domain frekuensi')y=allmargin(sys)hasil :
fungsi alih lingkar terbuka
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
---------------------------------
s^4 + 39 s^3 + 374 s^2 + 600 s
performasi sistem lingkar terbuka dalam domain frekuensi
y =
GainMargin: 1.4141
GMFrequency: 4.8600e-004
PhaseMargin: 44.9949
PMFrequency: 1.0002e-007
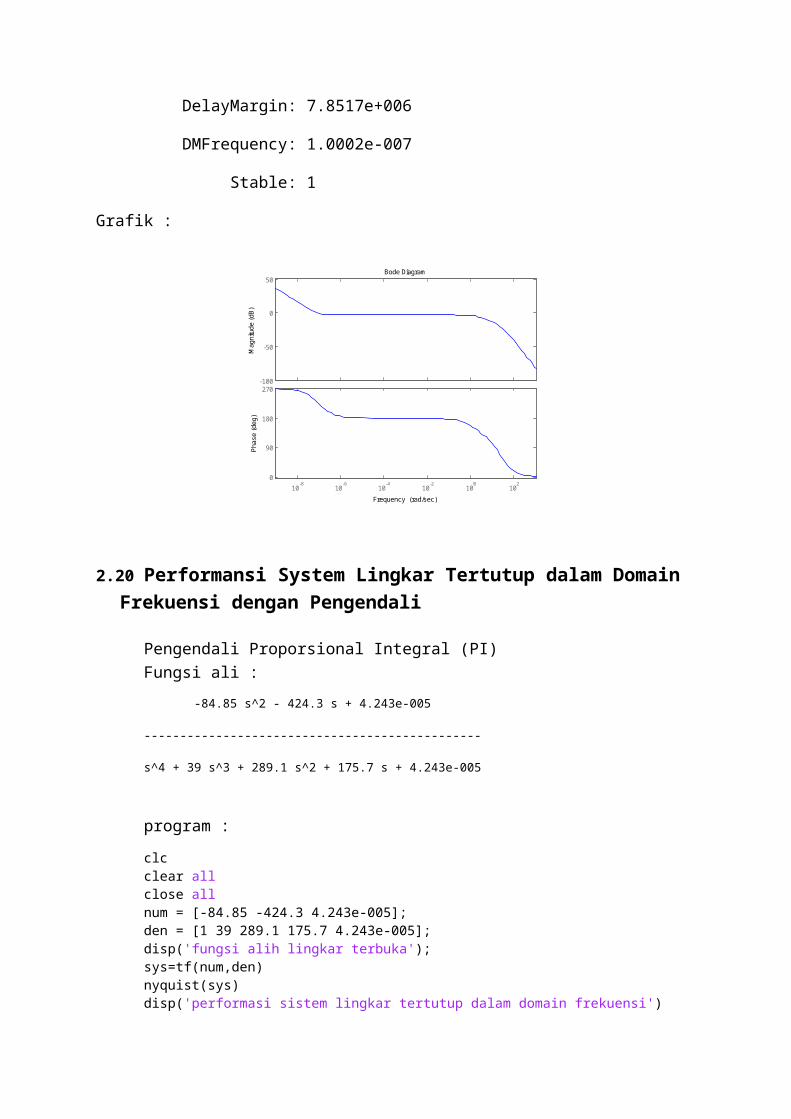
DelayMargin: 7.8517e+006
DMFrequency: 1.0002e-007
Stable: 1
Grafik :
-100
-50
0
50
Magnitude (dB)
10-8 10-6 10-4 10-2 100 1020
90
180
270
Phase (deg)
Bode Diagram
Frequency (rad/sec)
2.20 Performansi System Lingkar Tertutup dalam Domain Frekuensi dengan Pengendali
Pengendali Proporsional Integral (PI) Fungsi ali : -84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
program :clcclear allclose allnum = [-84.85 -424.3 4.243e-005];den = [1 39 289.1 175.7 4.243e-005];disp('fungsi alih lingkar terbuka');sys=tf(num,den)nyquist(sys)disp('performasi sistem lingkar tertutup dalam domain frekuensi')
y=allmargin(sys)w = 0 : 0.1 :100;[M,ph]= bode(num,den,w);frqspec(w,M)
hasil :
fungsi alih lingkar terbuka
Transfer function:
-84.85 s^2 - 424.3 s + 4.243e-005
-----------------------------------------------
s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005
performasi sistem lingkar tertutup dalam domain frekuensi
y =
GainMargin: 0.4141
GMFrequency: 4.8606e-004
PhaseMargin: [-180 -61.9394]
PMFrequency: [0 1.5162]
DelayMargin: [Inf 3.4311]
DMFrequency: [0 1.5162]
Stable: 0
Magnitude Puncak = 2.39
Frekuensi Puncak = 0.1
Bandwidth = 2.35
Grafik :
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Nyquist Diagram
Real Axis
Imagina
ry Axis
2.21Performansi Kestabilan Sistem dengan Pengendali Persamaan karakteristik :P = [s^4 + 39 s^3 + 289.1 s^2 + 175.7 s + 4.243e-005]
Program :clcclear allclose all%outline 6%kestabilan sistemdisp ('PERSAMAAN KARAKTERISTIK')P = [1 39 289.1 175.7 4.243e-005]disp('akar-akar persamaan karakteristik')K = roots(P) disp ('KRITERIA ROUTH')routh(P) disp ('KRITERIA HURWITZ')hurwitz (P)hasil :
PERSAMAAN KARAKTERISTIK
P =
1.0000 39.0000 289.1000 175.7000 0.0000
akar-akar persamaan karakteristik
K =
-29.3557
-8.9776
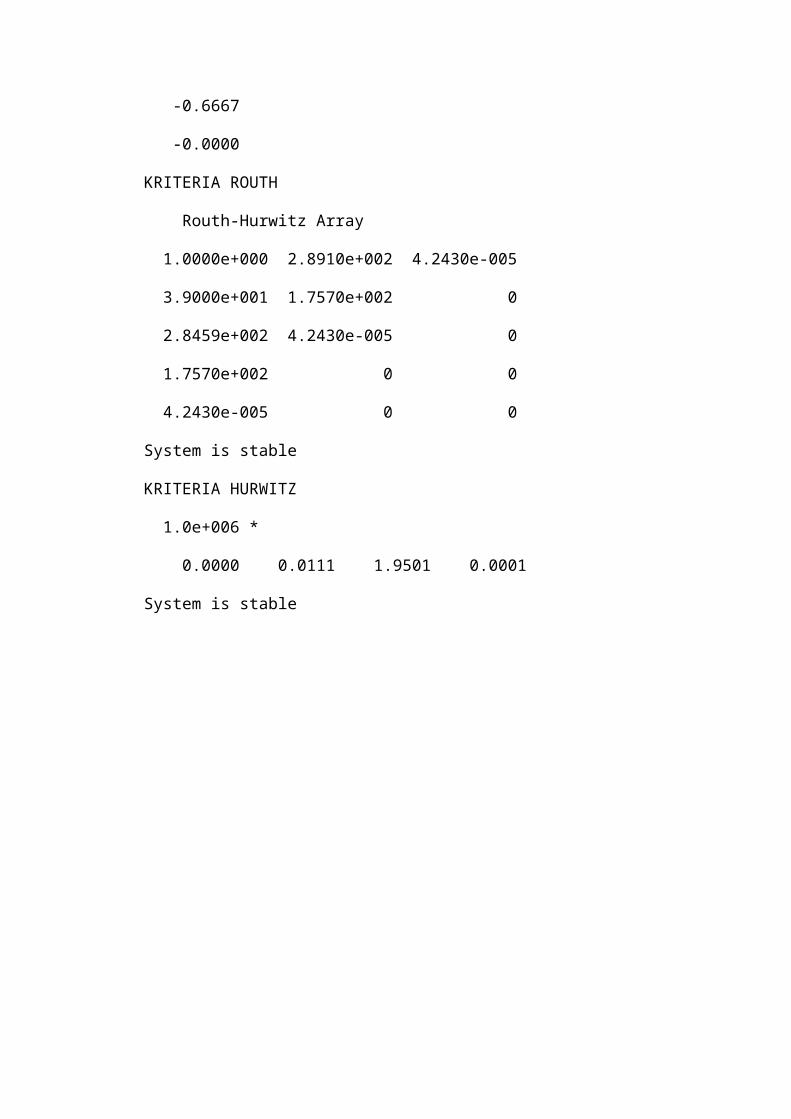
-0.6667
-0.0000
KRITERIA ROUTH
Routh-Hurwitz Array
1.0000e+000 2.8910e+002 4.2430e-005
3.9000e+001 1.7570e+002 0
2.8459e+002 4.2430e-005 0
1.7570e+002 0 0
4.2430e-005 0 0
System is stable
KRITERIA HURWITZ
1.0e+006 *
0.0000 0.0111 1.9501 0.0001
System is stable

BAB III
PENUTUP
3.1 KESIMPULAN
Berdasarkan simulasi yang telah dikerjakan, dapat di
ambil kesimpulan sebagai berikut :
System awal tanpa pengendali
G (s)= 2S2+14S+24
H (s)= s+5s+25
Pada system diatas,grafik fungsi alih lingkar tertutupnya
lebih randah dari pada fungsi alih lingkar terbuka. Hal ini
karena fungsi alih lingkar tertutup adanya elemen umpan
balik. Performansi sistem dalam domain waktu tanpa pengendali
untuk kesalahan keadaan mantap untuk masukan laju dan
parabolik memiliki nilai yang sangat besar sedangkan pada
kecepatan dan percepatan tidak ada kesalahan yang terjadi.
Performansi sistem lingkar tertutup dalam domain waktu tanpa
pengendali,
a. Tanggapan peralihan sistem terhadap masukan impulsa
satuan
a. Plot grafik tanggapan peralihan sistem terhadap masukan
undak satuan
b. Plot grafik tanggapan peralihan sistem terhadap masukan
ramp satuan
c. Plot grafik tanggapan peralihan sistem terhadap masukan
eksponensial
Dari nilai hasil dapat kita simpulkan bahwa system tanpa
pengendali ini belum stabil terhadap masukkan sinyal uji.
Performansi sistem lingkar terbuka maupun tertutup dalam
domain frekuensi tanpa pengendali ini tidak stabil jika ada
masukkan sinyal uji apapun. Performansi kestabilan sistem
tanpa pengendali dengan criteria hurtwith dan routh dinyatakan
stabil.
Performansi Sistem Sebelum Pemasangan Pengendali
Proporsional Integral Diferensial
RiseTime: 1.0643
SettlingTime: 1.8611
SettlingMin: 0.9006
SettlingMax: 1.0000
Overshoot: 0
Undershoot: 7.2045
Peak: 1.0000
PeakTime: 3.1526
Setelah diberi beberapa bentuk pengendalian, dapat kita lihat
bahwa pada saat pengendali Proporsional Integral Diferensial
dengan nilai
RiseTime: 0.9587
SettlingTime: 1.8068
SettlingMin: 0.0148
SettlingMax: 0.0164
Overshoot: 0
Undershoot: 0
Peak: 0.0164
PeakTime: 3.4804
Dari data yang didapat , bisa kita simpulkan bahwa waktu yang
dibutuhkan system untuk stabil setelah diberi pengendali lebih
sedikit,intinya system dalam domain waktu menjadi lebih stabil
saat diberi pengendali pengendali integral diferensial, dan
Performansi kestabilan sistem dengan pengendali pada kriteria
routh dan hurtwitz menyatakan bahwa system stabil.
Pengendali dan Kompensator Dengan Pendekatan Tanggapan
Frekuensi
Dari beberapa pengendali dan kompensator yang di cobakan,
dapat kita analisa bahwa pengendali Proporsional Integral
merupakan pengendali yang paling cocok untuk system dalam
domain frekuensi. Dapat kita lihat kriteria yang terpenuhi
saat di beri pengendali proporsional integral :
Magnitude Puncak = 2.39
Frekuensi Puncak = 0.1
Bandwidth = 2.35
Pengendali PI cocok untuk system domain frekuensi ini
karena pengendali PI akan menyebabkan frekuensi semakin naik,
waktu untuk stabil yang cepat, dan overshoot yang diredam.
Pengendali PI digunakan pada sistem kendali yang membutuhkan
perbaikan, baikpada tanggapan peralihan maupun pada tanggapan
keadaan tunak.
3.1 SARAN
Berikut penulis menyarankan beberapa hal kepada pembaca :
1. Pada saat menjalankan program matlab,untuk mempermudah
mencari variasi nilai dari waktu,nilai konstanta
lainnya agar system stabil dengan cara memasukkan
perpaudan nilai terbesar dan terkeci serta nilai tengah
untuk mempersempit wilayah percobaan.
2. Teliti dan sabar dalam menjalankan program karena akan
membutuhkan waktu lama untuk mendapatkan system yang
stabil.
3. Perhatikan penulisan program matlab dan usahakan
memahami dulu command dan tool yang ada pada matlab
yang kita perlukan.
Daftarpustaka
http://herudibyolaksono.files.wordpress.com/2011/02/bab-i-
pengantar-sistem-kendali1.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-ii-
latar-belakang-matematis.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-iii-
pemodelan-matematis-sistem-fisik.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-iv-
analisis-respon-transient.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-v-
kestabilan-sistem.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-vi-
analisis-kesalahan.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-vii-
aksi-dasar-pengendalian.pdf
http://herudibyolaksono.files.wordpress.com/2011/02/bab-viii-
metoda-tempat-kedudukan-akar.pdf
http://id.wikipedia.org/wiki/Sistem_kendali

Related Documents