T T R R A A N NS S F F O OR R M MA A T T A A W WA A V V E E L L E E T T V VER R S SUS S O O P P E ER R A AT O OR R I I C CL A AS SI I C C I I P P E E N N T T R R U U D D E E T T E E C C Ţ Ţ I I A A M MU UC C H H I I I I L L O OR R Asist.univ. R OMANA OANCEA Abstract Depending on the type of image and on the purpose of its utilization, there are more techniques for th e edge detection . This study, presents two modalities of edge detection: one based on gradient operators and the another one based on wavelet transform. The edge detection using gradient operators actually means the convolution of the image with a predefined mask, and the use of the wavelet transform implies the decomposition of each operator in orthogonal wavelet functions. 1. Operatori clasici pentru detecţia muchiilor Frontierele sunt zone din imagine caracterizate prin variaţii bruşte ale intensit ăţii. Detecţia muchiilor este o problemă fundamental ă în prelucrarea imaginilor, deoarece permite extragerea informa ţiei utile dintr- o imagine, informaţie necesar ă în analiza imaginilor. Detecţia frontierelor în imagini se bazează pe operatori care aproximează în planul discret gradientul sau laplacian-ul imaginii. Vectorul gradient reprezintă direcţia şi mărimea variaţiei maxime de intensitate într-un punct al unei imagini şi este definit în funcţie de derivatele par ţiale ale funcţiei imagine. Dacă notăm f(x, y) imaginea, atunci vectorul gradient este: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ = ∇ y ) y , x ( f x ) y , x ( f ) y , x ( f (1) Fie ) y , x ( f D x ∂ ∂ = şi, y ) y , x ( f D y ∂ ∂ = , atunci ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ Dy D y ) y , x ( f x ) y , x ( f x Operatorii gradient uzuali sunt Roberts (cruce), Sobel şi Prewitt şi sunt definiţi pentru imagini cu mai multe niveluri de gri, dar utilizarea lor poate fi extins ă şi la imagini color. În cazul imaginilor color, o modalitate de aplicare a operatorilor gradient este descompunerea imaginii în cele trei spaţii de culoare fundamentale (R, G, B) iar apoi aplicarea, pentru fiecare spaţiu, unui operator de detecţie de frontier ă.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 1/7
TTR R AANNSSFFOOR R MMAATTAA WWAAVVEELLEETT
VVEER R SSUUSS OOPPEER R AATTOOR R II CCLLAASSIICCII
PPEENNTTR R UU DDEETTEECCŢŢIIAA MMUUCCHHIIIILLOOR R
Asist.univ. R OMANA OANCEA
Abstract
Depending on the type of image and on the purpose of its utilization, there are moretechniques for the edge detection. This study, presents two modalities of edge detection: onebased on gradient operators and the another one based on wavelet transform. The edgedetection using gradient operators actually means the convolution of the image with apredefined mask, and the use of the wavelet transform implies the decomposition of eachoperator in orthogonal wavelet functions.
1. Operatori clasici pentru detecţia muchiilor
Frontierele sunt zone din imagine caracterizate prin variaţii bruşte aleintensităţii. Detecţia muchiilor este o problemă fundamentală în prelucrarea imaginilor, deoarece permite extragerea informaţiei utile dintr-o imagine, informaţie necesar ă în analiza imaginilor. Detecţia frontierelor în imagini se bazează pe operatori care aproximează în planul discretgradientul sau laplacian-ul imaginii.
Vectorul gradient reprezintă direcţia şi mărimea variaţiei maxime deintensitate într-un punct al unei imagini şi este definit în funcţie dederivatele par ţiale ale funcţiei imagine. Dacă notăm f(x, y) imaginea,atunci vectorul gradient este:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
=∇
y
) y , x( f x
) y , x( f
) y , x( f (1)
Fie ) y , x( f
D x ∂∂
= şi, y
) y , x( f D y ∂
∂= , atunci ⎥
⎦
⎤⎢⎣
⎡=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
Dy
D
y
) y , x( f
x ) y , x( f
x
Operatorii gradient uzuali sunt Roberts (cruce), Sobel şi Prewitt şisunt definiţi pentru imagini cu mai multe niveluri de gri, dar utilizarea lor poate fi extinsă şi la imagini color. În cazul imaginilor color, o modalitatede aplicare a operatorilor gradient este descompunerea imaginii în cele treispaţii de culoare fundamentale (R, G, B) iar apoi aplicarea, pentru fiecarespaţiu, unui operator de detecţie de frontier ă.

8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 2/7
Operatorul Laplacian, care detectează tranziţiile bruşte de intensitatedin imagine, cere mai puţin calcule. El este definit în funcţie de derivatele par ţiale de ordinul 2:
2
2
2
22
y
) y , x( f
x
) y , x( f ) y , x( f
∂
∂+
∂
∂=∇ (2)
Derivatele par ţiale de ordinul 2, de-a lungul direcţiilor x şi y, suntaproximate prin diferenţe finite astfel:
22
2
)(
)),(),(()),(),((
x
y x x f y x f y x f y x x f
x
f
Δ
Δ−−−−Δ+=
∂
∂
(3)
22
2
)(
)),(),(()),(),((
y
y y x f y x f y x f y y x f
y
f
Δ
Δ−−−−Δ+=
∂
∂
Fig. nr. 1a Imaginea original ă
Fig. nr. 1b Operatorul Sobel Fig. nr. 1c Operatorul Prewitt
Fig. nr. 1d Operatorul Roberts Fig. nr. 1e Operatorul Canny
2. Utilizarea transformatei wavelet la detecţia muchiilor
În cazul în care imaginea este afectată de zgomot operatorii clasici nu pot face diferenţă între un pixel afectat de zgomot, şi un pixel ce apar ţine
unei muchii şi pot scă pa pixeli de muchie. Pentru a rezolva această problemă se poate utiliza transformata wavelet. În fapt, fiecare operator poate fi descris ca un model discret de funcţii wavelet ortogonale.
Op Sobel Op prewitt
Op roberts Op CannyDeviatia standard=0.043655

8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 3/7
Operatorul Sobel poate fi descris ca model discret de următoarelefuncţii wavelet ortogonale:
21
22 y x
xe ) y , x(
+−
−=ψ (4)
22
22 y x
ye ) y , x(
+−
−=ψ Operatorul Prewitt poate fi descris ca model discret de două funcţiiwavelet Haar ortogonale:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
≤≤−<≤
≤≤−<≤−−
=ψ
altfel ,
, y , , , x ,
, y , , x , ,
) y , x(
0
51515101
51510511
1
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
≤≤−<≤
≤≤−<≤−−
=ψ
altfel ,
, x , , , y ,
, x , , y , ,
) y , x(
0
51515101
51510511
2
Operatorul Roberts poate fi descris ca două funcţii waveletortogonale:
21
22 y x
e ) x y( ) y , x(
+−
−=ψ
22
22 y x
e ) y x( ) y , x(
+−
+=ψ În cazul în care imaginea nu este afectată de zgomot, rezultatele
comparative obţinute sunt mai bune pentru detecţia muchiilor utilizândoperatorul Sobel. Utilizarea funcţiilor wavelet ortogonale la detecţiacontururilor necesită şi o subţiere de contur ulterioar ă.
Fig. nr. 2a Imaginea ini ţ ial ă Fig. nr. 2b Descompunerea operatorului
Sobel în func ţ ii wavelet ortogonale(scala N = 10)
(5)
(6)

8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 4/7
Fig. nr. 2c Descompunereaoperatorului Sobel în func ţ ii wavelet
ortogonale (scala N = 20)
Fig. nr. 2d Descompunerea operatoruluiSobel în func ţ ii wavelet ortogonale
(N = 30)
Fig. nr. 2e Descompunerea
operatorului Prewitt în func ţ ii wavelet
ortogonale (N = 10)
Fig. nr. 2f Descompunerea operatorului
Prewitt în func ţ ii wavelet ortogonale
(scala N = 20)
Fig. nr. 2g Descompunereaoperatorului Prewitt în func ţ ii wavelet
ortogonale (N = 30)
Fig. nr. 2h Descompunerea operatorului Roberts în func ţ ii wavelet ortogonale
(N = 10)
Fig. nr. 2i Descompunereaoperatorului Roberts în func ţ iiwavelet ortogonale (N = 20)
Fig. nr. 2j Descompunerea operatorului Roberts în func ţ ii wavelet ortogonale
(N = 30)
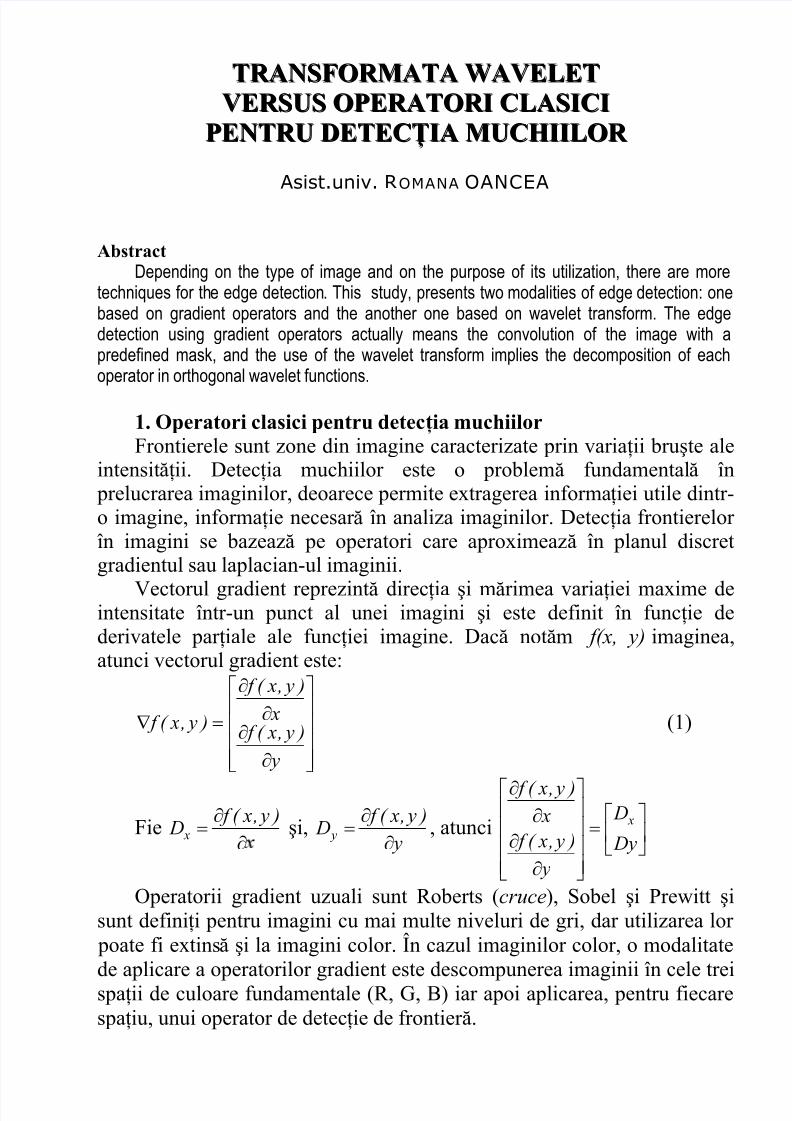
Pentru o imagine afectată de zgomot, operatorii clasici (figura nr. 3c)nu pot face diferenţa între zgomotul din imagine şi muchie, astfel că rezultate bune s-au obţinut în urma descompunerii operatorilor clasici înfuncţii wavelet ortogonale (figura nr. 3 b-e).
8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 5/7
Fig. nr. 3a Imaginea ini ţ ial ă ; SNR = 10 dB
Fig. nr. 3b Operator Sobel clasic Fig. nr. 3c. Descompunereaoperatorului Sobel în func ţ ii wavelet
ortogonale (N = 10)
Fig. 3d. Descompunerea operatoruluiSobel în func ţ ii wavelet ortogonale
(N = 20)
Fig. 3e. Descompunerea operatoruluiSobel în func ţ ii wavelet ortogonale
(N = 30)
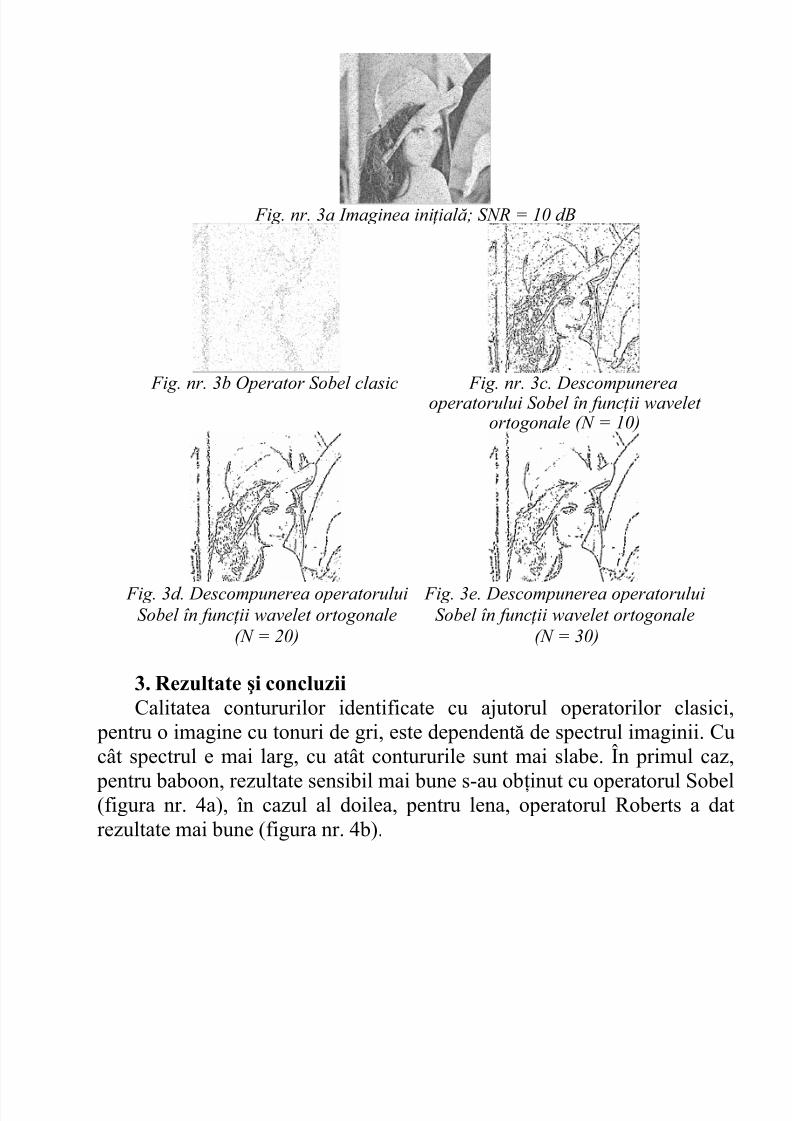
3. Rezultate şi concluzii
Calitatea contururilor identificate cu ajutorul operatorilor clasici, pentru o imagine cu tonuri de gri, este dependentă de spectrul imaginii. Cucât spectrul e mai larg, cu atât contururile sunt mai slabe. În primul caz,
pentru baboon, rezultate sensibil mai bune s-au obţinut cu operatorul Sobel(figura nr. 4a), în cazul al doilea, pentru lena, operatorul Roberts a datrezultate mai bune (figura nr. 4b).

8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 6/7
Original Image
Roberts Operator
Standard deviation=0.04647
Sobel Operator
Standard deviation=0.051316
Prewitt Operator
Standard deviation=0.05061
Original Image
Roberts Operator
Standard deviation=0.084837
Sobel OperatorStandard deviation=0.081287
Prewitt OperatorStandard deviation=0.080756
Fig. nr. 4a Imagine cu spectru larg Fig. nr. 4b Imagine cu spectru mai îngust
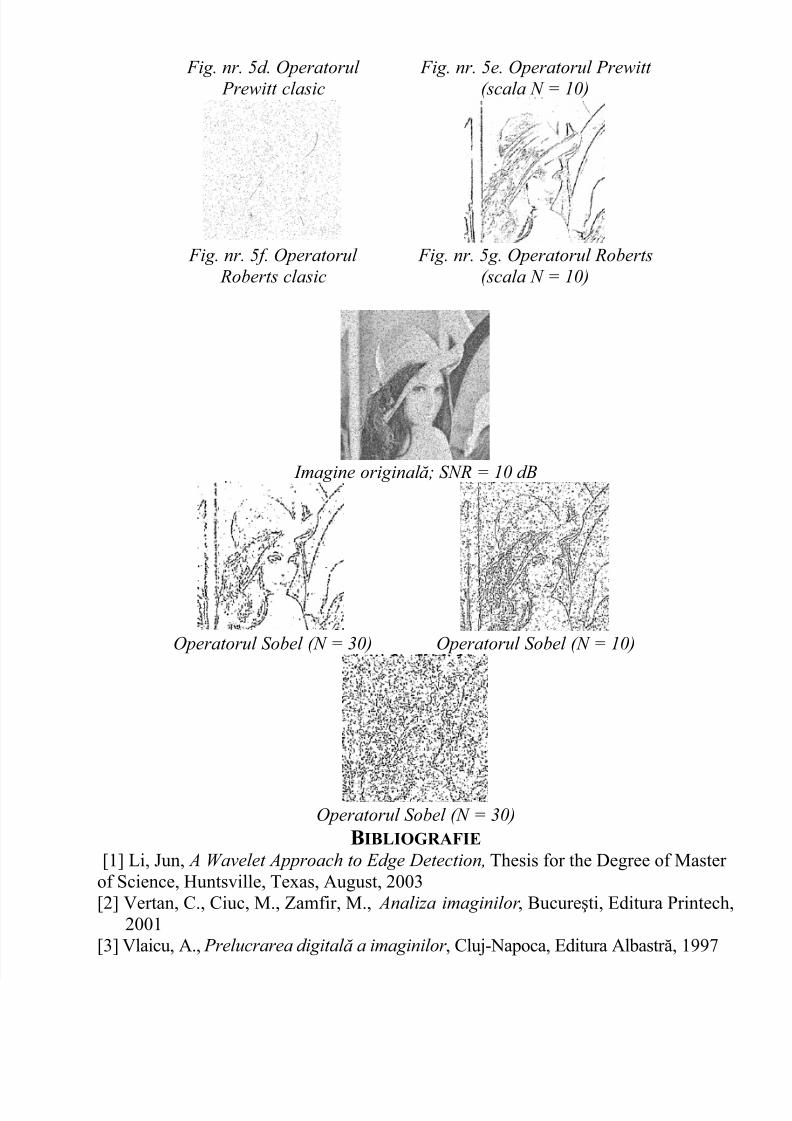
Pentru imaginile afectate de zgomot, indiferent de lărgimea spectrului,operatorii clasici nu deosebesc zgomotul de contur astfel că, pentrudetecţia conturului, fiecare operator trebuie descris ca un model discret defuncţii wavelet ortogonale. Pe de altă parte, în funcţie de nivelul de zgomottrebuie aplicată transformata wavelet la diverse niveluri de rezoluţii. Cucât SNR (Signal to Noise Ration) este mai mic, cu atât trebuie utilizate maimulte niveluri de descompunere.
Fig. nr. 5a. Imaginea original ă ; SNR = 19 dB
Fig. nr. 5b. Operatorul Sobel
clasic
Fig. nr. 5c. Operatorul Sobel
(scala N = 10)p wavelet prewitt =1
8/8/2019 Transform at A Wavelet
http://slidepdf.com/reader/full/transform-at-a-wavelet 7/7
Fig. nr. 5d. Operatorul
Prewitt clasic
Fig. nr. 5e. Operatorul Prewitt
(scala N = 10)l r r
Fig. nr. 5f. Operatorul
Roberts clasic
Fig. nr. 5g. Operatorul Roberts
(scala N = 10)
Imagine original ă ; SNR = 10 dB
Operatorul Sobel (N = 30) Operatorul Sobel (N = 10)
Operatorul Sobel (N = 30)
BIBLIOGRAFIE [1] Li, Jun, A Wavelet Approach to Edge Detection, Thesis for the Degree of Master
of Science, Huntsville, Texas, August, 2003[2] Vertan, C., Ciuc, M., Zamfir, M., Analiza imaginilor , Bucureşti, Editura Printech,
2001[3] Vlaicu, A., Prelucrarea digital ă a imaginilor , Cluj-Napoca, Editura Albastr ă, 1997
Related Documents











