UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO, FACULTAD DE INGENIERÍA “Trabajo de investigación” Robótica Rocha Palacios Mariana Alejandra 15 de agosto de 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO, FACULTAD DE INGENIERÍA
“Trabajo de investigación”
Robótica
Rocha Palacios Mariana Alejandra 15 de agosto de 2014
INTRODUCCIÓN Y CONCEPTO DE ROBÓTICA
La robótica es una ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces
de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia. Las ciencias y
tecnologías de las que deriva podrían ser: el álgebra, los autómatas programables, las máquinas de estados,
la mecánica o la informática.
De forma general, la robótica se define como: el conjunto de conocimientos teóricos y prácticos que permiten
concebir, realizar y automatizar sistemas basados en estructuras mecánicas poli articuladas, dotados de un
determinado grado de "inteligencia" y destinados a la producción industrial o al sustitución del hombre en
muy diversas tareas.
Un sistema robótico se puede describirse, como "aquel que es capaz de recibir información, de comprender
su entorno a través del empleo de modelos, de formular y de ejecutar planes, y de controlar o supervisar su
operación". La robótica es esencialmente pluridisciplinaria y se apoya en gran medida en los progresos de la
microelectrónica y de la informática, así como en los de nuevas disciplinas tales como el reconocimiento de
patrones y de inteligencia artificial.
RESUMEN DE TRABAJO
En el presente escrito se habla sobre qué es la robótica, los inicios de esta y la forma en la que ha ido
evolucionado a través del tiempo. Así mismo se tratan temas como las diversas formas en las que se pueden
clasificar los robots pero, sobre todo, este trabajo se enfoca en los robots industriales, que es el tema de
mayor interés para la materia.
Para poder entender bien el funcionamiento de un robot se tratan cuestiones tales como las configuraciones
que pueden tener, los tipos de articulaciones que poseen, los componentes básicos que lleva un robot
industrial, aplicaciones y ejemplos de robots industriales, entre otros.
ANTECEDENTES DE LA ROBÓTICA
Antiguamente, se creaban artefactos capaces de realizar tareas diarias y comunes para los hombres, o bien, para facilitarles las labores cotidianas; se daban cuenta de que había tareas repetitivas que se podían igualar con un complejo sistema, y es así como se comienza a crear máquinas capaces de repetir las mismas labores que el hombre realizaba, y como ejemplo de estas máquinas podemos citar las siguientes:
La rueda como medio de transporte o como herramienta, por ejemplo, para un alfarero.
El engrane.
La catapulta como arma de combate.
El molino, ya sea para obtener agua de las entrañas de la tierra, o como moledor de granos.
Y así una gran variedad de máquinas que antiguamente se creaban para facilitarles las tareas a los hombres.
Pero no todos estos artefactos tenían una utilidad, algunas máquinas solamente servían para entretener a sus dueños, y no hacían nada más que realizar movimientos repetitivos o emitir sonidos.
La palabra robot surge con la obra RUR, los "robots universales de Rossum" de Karel Capek, es una palabra checoeslovaca que significa trabajador, sirviente. Sin embargo podemos encontrar en casi todos los mitos de las diversas culturas una referencia a la posibilidad de crear un ente con inteligencia, desde el popol-vuh de nuestros antepasados mayas hasta el golem del judaísmo. Desde la época de los griegos se intentó crear dispositivos que tuvieran un movimiento sin fin, que no fuera controlado ni supervisado por personas.
Dédalo construyó estatuas que se movían solas. Arquímedes, descubrió su famoso principio e inventó la leva, resorte y el tornillo sin fin que lleva su propio nombre. Heron de Alejandría, en su "Tratado de Pneumática", describe aves que vuelan, gorgojean y beben. Algunos de estos dispositivos fueron ya conocidos por Ctesibio.
En la Alta Edad Media fueron los artesanos, sobre todo los del gremio de relojería, los que construyeron autómatas de figuras humanas o de animales que tenían toda la semblanza de moverse como si estuvieran vivos y capaces de generar sonidos.
El Renacimiento con la mejora del progreso tecnológico, derivado sobre todo en el campo de la relojería, fueron muy importantes. Famosos son el León animado y autómatas de funcionamiento cíclico gobernado por tambores de púas construidos por Leonardo da Vinci.
En el siglo XVIII, el francés Jacques de Vaucanson construyó una serie de celebres autómatas como músicos de tamaño humano o el pato expuesto en París en 1738. Esencialmente se trataba de robots mecánicos diseñados para un propósito específico: la diversión, principalmente de la corte o, eventualmente, motivo de atracción de las ferias.
En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos. Una serie de levas se utilizaban como ‘el programa’ para el dispositivo en el proceso de escribir y dibujar. Estas creaciones mecánicas de forma humana deben considerarse como inversiones aisladas que reflejan el genio de hombres que se anticiparon a su época. Hubo otras invenciones mecánicas durante la revolución industrial, creadas por mentes de igual genio, muchas de las cuales estaban dirigidas al sector de la producción textil. Entre ellas se puede citar la hiladora giratoria de Hargreaves (1770), la hiladora mecánica de Crompton (1779), el telar mecánico de Cartwright (1785), el telar de Jacquard (1801), y otros.
Algunos de los primeros robots empleaban mecanismos de realimentación para corregir errores, mecanismos que siguen empleándose actualmente. Un ejemplo de control por realimentación es un bebedero que emplea un flotador para determinar el nivel del agua. Cuando el agua cae por debajo de un nivel determinado, el flotador baja, abre una válvula y deja entrar más agua en el bebedero. Al subir el agua, el flotador también sube, y al llegar a cierta altura se cierra la válvula y se corta el paso del agua.
El primer auténtico controlador realimentado fue el regulador de Watt, inventado en 1788 por el ingeniero británico James Watt. Este dispositivo constaba de dos bolas metálicas unidas al eje motor de una máquina de vapor y conectadas con una válvula que regulaba el flujo de vapor. A medida que aumentaba la velocidad de la máquina de vapor, las bolas se alejaban del eje debido a la fuerza centrífuga, con lo que cerraban la válvula. Esto hacía que disminuyera el flujo de vapor a la máquina y por tanto la velocidad.
El control por realimentación, el desarrollo de herramientas especializadas y la división del trabajo en tareas más pequeñas que pudieran realizar obreros o máquinas fueron ingredientes esenciales en la automatización de las fábricas en el siglo XVIII. A medida que mejoraba la tecnología se desarrollaron máquinas especializadas para tareas como poner tapones a las botellas o verter caucho líquido en moldes para neumáticos. Sin
embargo, ninguna de estas máquinas tenía la versatilidad del brazo humano, y no podían alcanzar objetos alejados y colocarlos en la posición deseada.
El desarrollo del brazo artificial multiarticulado, o manipulador, llevó al moderno robot. El inventor estadounidense George Devol desarrolló en 1954 un brazo primitivo que se podía programar para realizar tareas específicas. En 1975, el ingeniero mecánico estadounidense Victor Scheinman, cuando estudiaba la carrera en la Universidad de Stanford, en California, desarrolló un manipulador polivalente realmente flexible conocido como Brazo Manipulador Universal Programable (PUMA, siglas en inglés). El PUMA era capaz de mover un objeto y colocarlo en cualquier orientación en un lugar deseado que estuviera a su alcance. El concepto básico multiarticulado del PUMA es la base de la mayoría de los robots actuales.
En 1979 se desarrolla un robot tipo SCARA (Selective Compliance Arm for Robotic Assambly) en la Universidad de Yamanashi en Japón para montaje. Varios robots SCARA comerciales se introdujeron hacia 1981.
En 1980 un sistema robótico de captación de recipientes fue objeto de demostración en la Universidad de Rhode Island. Con el empleo de visión de máquina el sistema era capaz de captar piezas en orientaciones aleatorias y posiciones fuera de un recipiente.
Se desarrolló en la Universidad de Carnegie- Mellon en 1981 un robot de impulsión directa. Utilizaba motores eléctricos situados en las articulaciones del manipula dor sin las transmisiones mecánicas habituales empleadas en la mayoría de los robots.
En 1982 IBM introdujo el robot RS-1 para montaje, basado en varios años de desarrollo interno. Se trata de un robot de estructura de caja que utiliza un brazo constituido por tres dispositivos de deslizamiento ortogonales. El lenguaje del robot AML, desarrollado por IBM, se introdujo también para programar el robot SR-1.
CLASIFICACIÓN DE ROBOTS
Dados los diferentes criterios de partida, etapas de desarrollo, generaciones y propiedades que han
caracterizado a los robots a través de su evolución histórica, existen diversas clases de robots, diferentes
tanto por sus aplicaciones como por su forma de trabajo.
A continuación se realiza la clasificación de los robots desde el punto de vista del control de sus movimientos:
1. Sin servocontrol: el programa que controla el movimiento de los diferentes componentes del robot se
realiza en un posicionamiento “punto a punto” en el espacio.
2. Con servocontrol: este tipo de control permite, a su vez, dos formas de trabajo:
Gobierno de los movimientos de los elementos del robot en función de sus ejes. Los
desplazamientos pueden realizarse punto a punto o con “trayectoria continua”
Los movimientos se establecen en función de la posición respecto a los ejes de coordenadas
(x,y,z) y de la orientación de la mano o herramienta del robot.
En base a su arquitectura se pueden dividir en:
1. Poliarticulados: son sedentarios y están estructurados para mover sus elementos terminales en un
determinado espacio de trabajo con un número limitado de grados de libertad (manipuladores y
algunos robots industriales).
2. Móviles: Cuentan con gran capacidad de desplazamiento, basados en carros o plataformas y dotados
de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la
información recibida de su entorno a través de sus sensores.
3. Androides: intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser
humano. Uno de los aspectos más complejos de estos robots es la locomoción bípeda (controlar
dinámicamente el movimiento y mantener el equilibrio del robot).
4. Zoomórficos: imitan los sistemas de locomoción de los diversos seres vivos
• No caminadores: basados en segmentos cilíndricos biselados acoplados axialmente entre sí y
dotados de un movimiento relativo de rotación
• Caminadores: multípedos capaces de evolucionar en superficies muy accidentadas.
5. Híbridos: aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las
anteriores (un carro móvil con un brazo, robot personal antropomorfo, etc.)
A continuación se van a describir, brevemente, los cinco grandes tipos de robots:
1. Robots inteligentes: son manipuladores o sistemas mecánicos multifuncionales controlados por
computador, capaces de relacionarse con su entorno a través de sensores y de tomar decisiones en
tiempo real (autoprogramables).
2. Robots con control por computador: son similares a los del grupo anterior, pero carecen de capacidad
de relacionarse con el entorno que los rodea.
3. Robots de aprendizaje: se limitan a repetir una secuencia de movimientos, realizada con la
intervención de un operador y memorizada.
4. Manipuladores: son sistemas mecánicos multifuncionales, cuyo sencillo sistema de control permite
gobernar el movimiento de sus elementos de las formas siguientes:
Manual, cuando el operario controla directamente al manipulador.
De secuencia variable, cuando es posible alterar algunas de las características de los ciclos de
trabajo.
De secuencia fija, cuando se repite de forma invariante, el proceso de trabajo preparado
previamente.
5. Micro-robots.
ROBÓTICA INDUSTRIAL
Se entiende por robot industrial a un dispositivo de maniobra destinado a ser utilizado en la industria y
dotado de uno o varios brazos, fácilmente programable para cumplir operaciones diversas con varios grados
de libertad y destinado a sustituir la actividad física del hombre en las tareas repetitivas, monótonas,
desagradables o peligrosas.
El RIA robot Institute of América define al robot como "un manipulador multifuncional reprogramable,
diseñado para mover materiales, partes, herramientas o dispositivos especializados a través de movimientos
variables programados para la performance de una variedad de labores".
Estas definiciones indudablemente no abarcan todas las posibilidades de aplicación presente y futuras de los
robots y en opinión de quienes escriben, el robot es para la producción, lo que el computador es para el
procesamiento de datos. Es decir, una nueva y revolucionaria concepción del sistema productivo cuyos
alcances recién comienzan a percibirse en los países altamente industrializados.
Realmente, los robots no incorporan nada nuevo a la tecnología en general, la novedad radica en la
particularidad de su arquitectura y en los objetivos que se procura con los mismos. El trabajo del robot se
limita generalmente a pocos movimientos repetitivos de sus ejes, estos son casi siempre 3 para el cuerpo y 3
para la mano o puño, su radio de acción queda determinado por un sector circular en el espacio donde este
alcanza a actuar. Cuando las partes o piezas a manipular son idénticas entre sí y se presentan en la misma
posición, los movimientos destinados a reubicar o montar partes se efectúan mediante dispositivos
articulados que a menudo finalizan con pinzas.
La sucesión de los movimientos se ordena en función del fin que se persigue, siendo fundamental la
memorización de las secuencias correspondientes a los diversos movimientos. Puede presentarse el caso en el
que las piezas o partes a ser manipuladas no se presenten en posiciones prefijadas, en este caso el robot
deberá poder reconocer la posición de la pieza y actuar u orientarse para operar sobre ella en forma correcta,
es decir se lo deberá proveer de un sistema de control adaptativo.
Si bien no existen reglas acerca de la forma que debe tener un robot industrial, la tecnología incorporada a él
está perfectamente establecida y en algunos casos esta procede de las aplicadas a las máquinas-herramientas.
Los desplazamientos rectilíneos y giratorios son neumáticos, hidráulicos o eléctricos. Como es sabido, los
sistemas neumáticos no proveen movimientos precisos debido a la compresibilidad del aire y en ellos deben
emplearse topes positivos para el posicionamiento, lo que implica la utilización de dispositivos de
desaceleración. Los robots neumáticos poseen una alta velocidad de operación manipulando elementos de
reducido peso.
Los accionamientos hidráulicos proporcionan elevadas fuerzas, excelente control de la velocidad y
posicionamiento exacto. En cuanto a los sistemas eléctricos se utilizan motores de corriente continua o
motores paso a paso. Estos dos tipos de robots quedan reservados a la manipulación de elementos más
pesados o los procesos de trayectorias complejas como las tareas de soldadura por punto o continúa.
TIPOS DE ROBOTS INDUSTRIALES
Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de
origen manufacturado en fábricas o industrias. Los tipos más habituales son:
a. Robots de paletizado
b. Robots de soldadura
c. Robots de carga
d. Robots scara
e. Robots de ensamblaje
f. Robots para aplicación de pintura
g. Robots para logística
h. Robots para inspección de productos
a) Robots de paletizado
Los robots de paletizado permiten ubicar productos, materiales y en general objetos que se encuentren
situado sobre un palet.
Los sistemas automáticos de paletizado son de muy diversa naturaleza y aspecto. Algunos robots de
paletizado se encuentran distribuidos por todo el recinto de almacenaje y tienen la forma de cintas de
transporte y numerosas carretillas que permiten situar los palets a diferentes alturas.
Otros robots de paletizado, presentan la forma de un eje de dos dimensiones que permite situar los palets en
repisas a una sola altura.
b) Robots de soldadura
Se emplean masivamente en el ensamblaje de vehículos a motor, la soldadura por arco es la más habitual.
Los robots de soldadura suelen tener la apariencia de un brazo articulado que mediante algún mecanismo
alimenta los electrodos necesarios para producir la soldadura.
c) Robots de carga
Este tipo de robots suele estar formado por un doble eje (X e Y) que permite desplazar cargas sobre dos
puntos, de esta forma nos situamos en el punto A y recogemos el objeto en cuestión para a continuación
desplazarnos sobre el plano y situarlo en un punto B.
Suele ser necesario un tercer grado de libertad (en Z) para poder desplazar los objetos verticalmente y evitar
así que toquen el suelo.
Un lugar muy frecuente de aplicación de este tipo de robots son los puertos aduaneros y se aplican tanto a la
carga como a la descarga de barcos de transporte de cargas.
d) Robots scara
Los robots Scara (Selective Compliance Assembly Robot Arm) son robots equipados de libertad total de
movimientos en los ejes X e Y pero limitados severamente en sus desplazamientos en el eje Z.
Es decir, se comportan de forma parecida al brazo humano, permitiendo ubicar el extremo de la mano en
cualquier ubicación pero siempre sobre el plano. En el eje vertical solo realizan manipulaciones simples que
habitualmente consisten en presionar y desplazarse unos pocos centímetros.
Debido a estas características se usan sobremanera en la fabricación de electrónica de consumo y en la
clasificación de artículos para su empaquetado.
e) Robots de ensamblado o Sistema de manufactura integrada
Los robots de ensamblado no poseen las mismas características de otros tipos de robots, en este caso
hablamos de sistemas autónomos controlados por computadora, son muy empleados en la industria de hoy
en día ya que se enfocan al desarrollo de procesos automatizados para la fabricación.
En dichos sistemas se incluyen elementos robóticos y estaciones para diversos propósitos como lo son:
maquinados, inspección, transporte, almacenamiento, ensamble, entre otros. El ensamble manual se clasifica
con frecuencia como una operación "no calificada", sin embargo, en el diseño de robots se pretende obtener
estabilidad y precisión, considerando que la industria actual requiere ensambles y movimientos no solo en
una posición, siendo éste uno de los problemas que se presentan en el laboratorio de manufactura integrada.
f) Robots de pintura
Su morfología es similar a la de otros robots, como por ejemplo a la de los robots de soldadura, solo que en
este caso particular están combinados con otro tipo de herramienta, en vez de poseer un cabezal con
electrodos, poseen inyectores de pintura, que podrán variar notoriamente según el trabajo a realizar.
Son utilizados para esta aplicación dada su conocida precisión y uniformidad de movimiento, lo que logra un
acabado óptimo en la superficie tratada. No obstante, usualmente son ayudados por mano de obra humana
debido a que dependiendo de la complejidad de la pieza sobre la que se efectúa el trabajo puede darse la
situación de que el robot no alcance todos los espacios que requieran cobertura, necesitando así una
supervisión extra.
g) Robots para logística
Estos robots se utilizan para resolver la logística dentro de grandes depósitos, logrando un incremento
sensiblemente notable en la velocidad de despachos de mercadería.
En semejanza con los sistemas robotizados de manufactura integrada, los robots de logística están
conformados por varias unidades robóticas, que tal como la definición de sistema lo específica, la suma
individual de sus partes no da el mismo resultado que analizando al sistema como un todo. Cada una de las
unidades conformantes posee cierto grado de autonomía que esta expresada en la capacidad de resolver
dificultades tales como la detección de obstáculos en las vías destinadas para el tránsito. En caso de encontrar
alguna anomalía o contingencia, la unidad que lo haga reporta tal suceso a una unidad central. Esta unidad
central es de carácter estático, tiene un aspecto similar a una estación de servidores de computadoras, y es la
encargada de realizar el planeamiento y determinación de rutas para cada uno de los despachadores ya que
es la que conoce el estado de todo el sistema, ya sea rutas bloqueadas, sectores de excesivo tránsito,
ubicación de las mercaderías, etc. Una vez determinada la solución del problema, la central envía la
información pertinente a la unidad que la solicito.
CONFIGURACIONES MORFOLÓGICAS Y PARÁMETROS CARACTERÍSTICOS DE LOS ROBOTS INDUSTRIALES
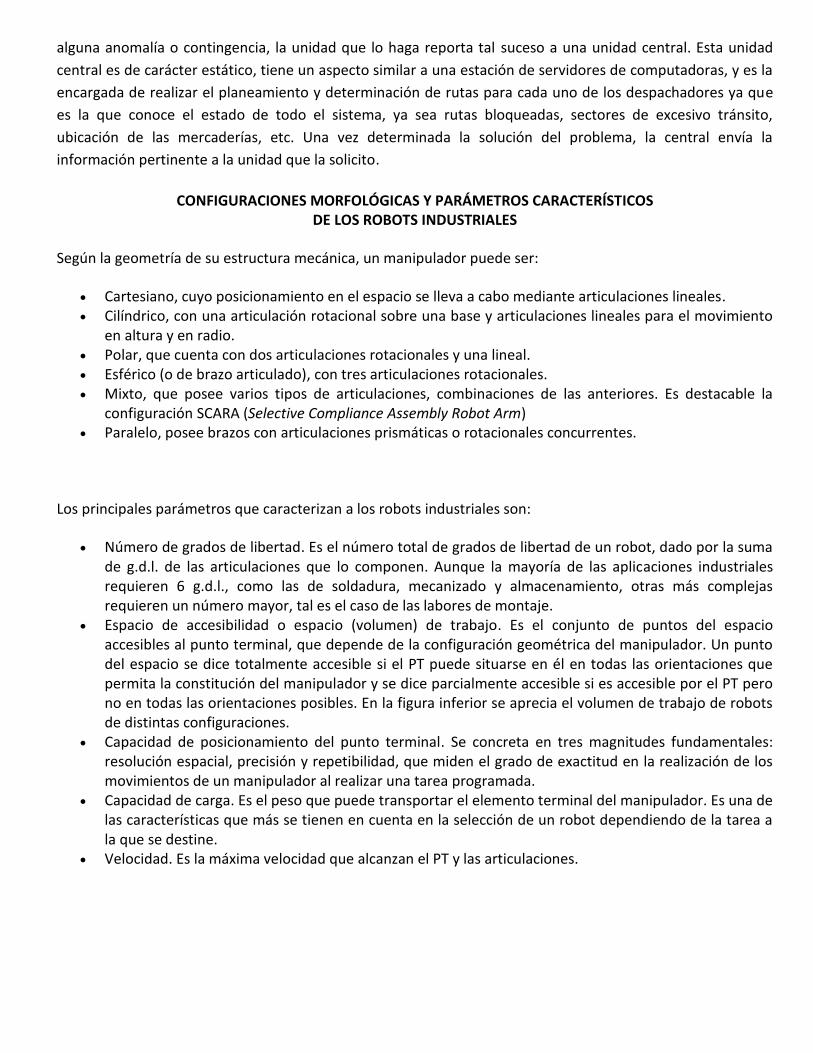
Según la geometría de su estructura mecánica, un manipulador puede ser:
Cartesiano, cuyo posicionamiento en el espacio se lleva a cabo mediante articulaciones lineales. Cilíndrico, con una articulación rotacional sobre una base y articulaciones lineales para el movimiento
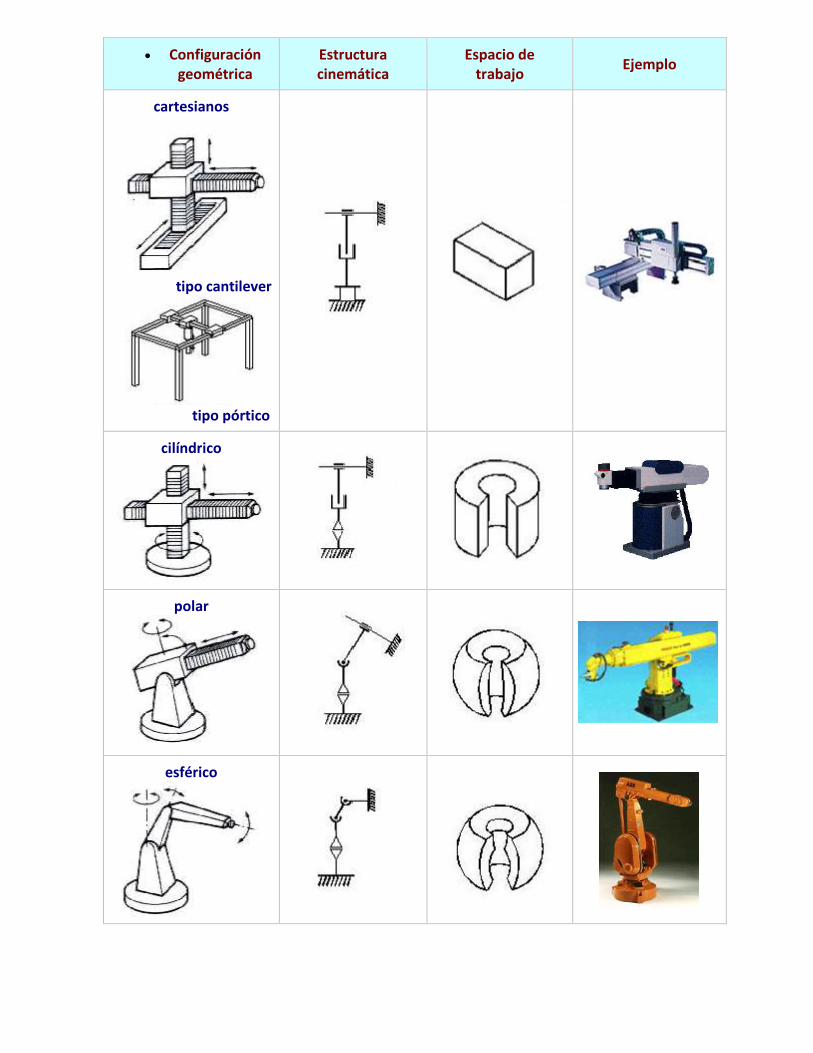
en altura y en radio. Polar, que cuenta con dos articulaciones rotacionales y una lineal. Esférico (o de brazo articulado), con tres articulaciones rotacionales. Mixto, que posee varios tipos de articulaciones, combinaciones de las anteriores. Es destacable la
configuración SCARA (Selective Compliance Assembly Robot Arm) Paralelo, posee brazos con articulaciones prismáticas o rotacionales concurrentes.
Los principales parámetros que caracterizan a los robots industriales son:
Número de grados de libertad. Es el número total de grados de libertad de un robot, dado por la suma de g.d.l. de las articulaciones que lo componen. Aunque la mayoría de las aplicaciones industriales requieren 6 g.d.l., como las de soldadura, mecanizado y almacenamiento, otras más complejas requieren un número mayor, tal es el caso de las labores de montaje.
Espacio de accesibilidad o espacio (volumen) de trabajo. Es el conjunto de puntos del espacio accesibles al punto terminal, que depende de la configuración geométrica del manipulador. Un punto del espacio se dice totalmente accesible si el PT puede situarse en él en todas las orientaciones que permita la constitución del manipulador y se dice parcialmente accesible si es accesible por el PT pero no en todas las orientaciones posibles. En la figura inferior se aprecia el volumen de trabajo de robots de distintas configuraciones.
Capacidad de posicionamiento del punto terminal. Se concreta en tres magnitudes fundamentales: resolución espacial, precisión y repetibilidad, que miden el grado de exactitud en la realización de los movimientos de un manipulador al realizar una tarea programada.
Capacidad de carga. Es el peso que puede transportar el elemento terminal del manipulador. Es una de las características que más se tienen en cuenta en la selección de un robot dependiendo de la tarea a la que se destine.
Velocidad. Es la máxima velocidad que alcanzan el PT y las articulaciones.
Configuración geométrica
Estructura cinemática
Espacio de trabajo
Ejemplo
cartesianos
tipo cantilever
tipo pórtico
cilíndrico
polar
esférico
SCARA
paralelo
Configuraciones geométricas, estructura cinemática, espacio de accesibilidad y ejemplos de robots industriales
TIPOS DE ARTICULACIONES
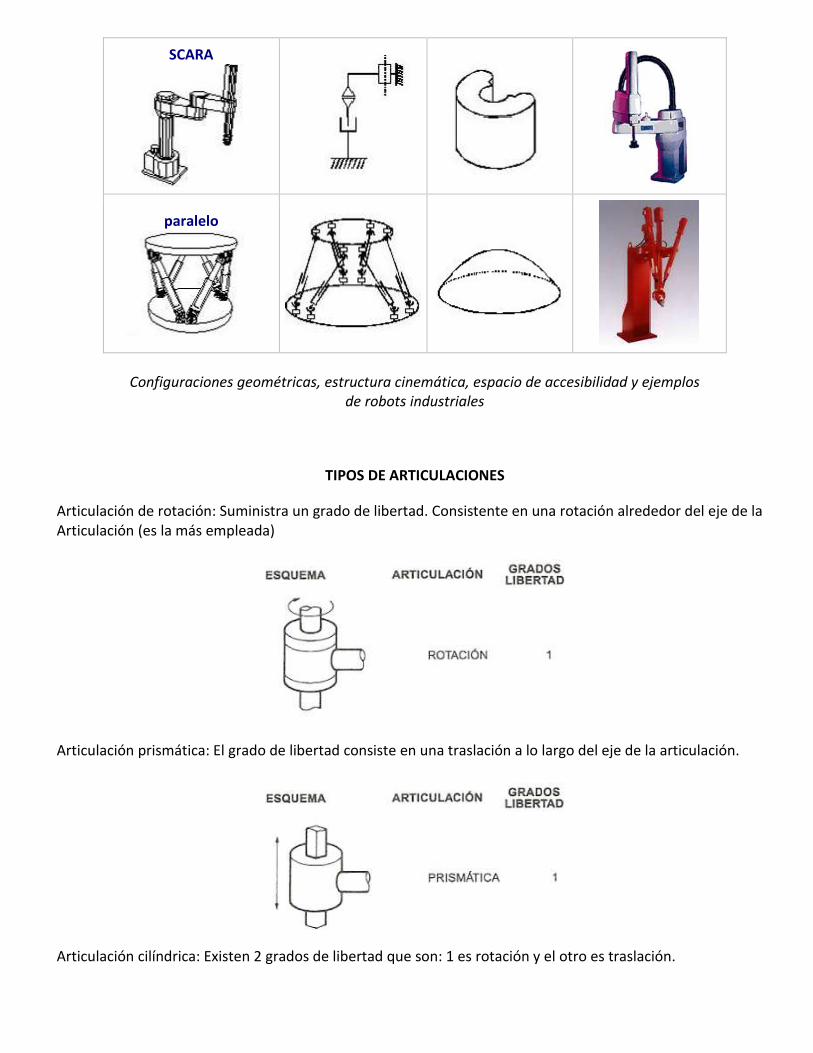
Articulación de rotación: Suministra un grado de libertad. Consistente en una rotación alrededor del eje de la Articulación (es la más empleada)
Articulación prismática: El grado de libertad consiste en una traslación a lo largo del eje de la articulación.
Articulación cilíndrica: Existen 2 grados de libertad que son: 1 es rotación y el otro es traslación.
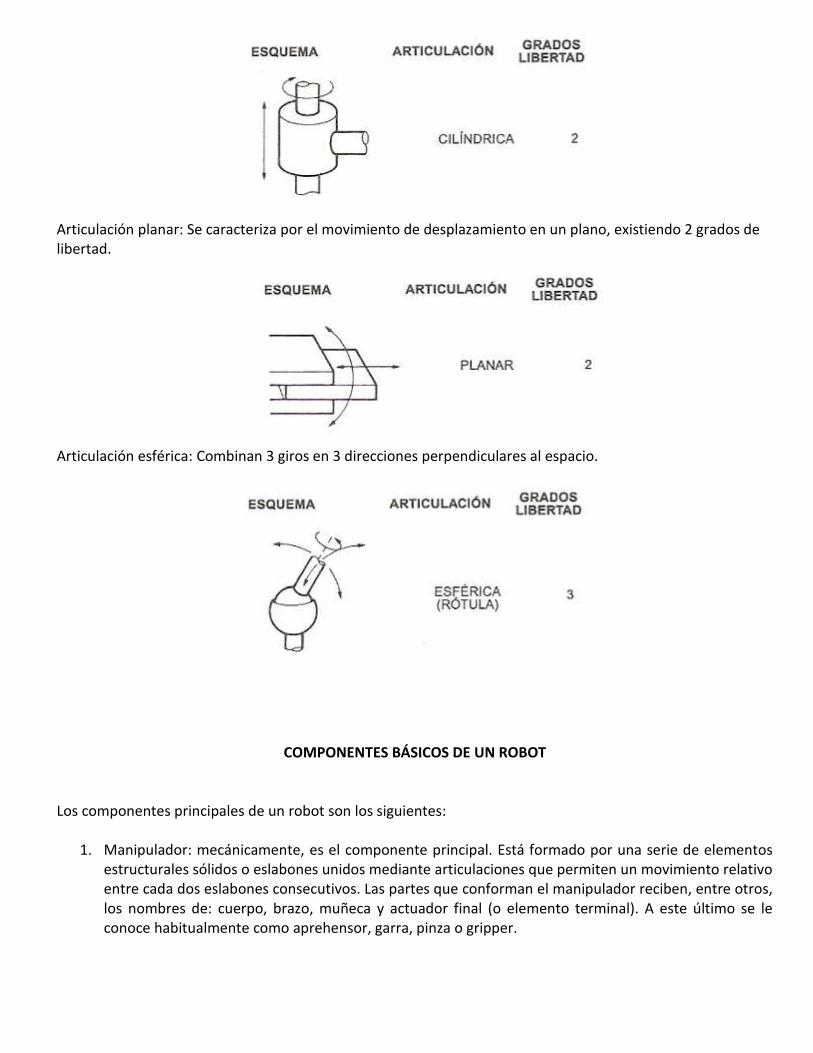
Articulación planar: Se caracteriza por el movimiento de desplazamiento en un plano, existiendo 2 grados de libertad.
Articulación esférica: Combinan 3 giros en 3 direcciones perpendiculares al espacio.
COMPONENTES BÁSICOS DE UN ROBOT
Los componentes principales de un robot son los siguientes:
1. Manipulador: mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal). A este último se le conoce habitualmente como aprehensor, garra, pinza o gripper.
2. Controlador: es el componente que regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas. Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores: de posición, cinemático, dinámico y adaptativo.
3. Dispositivos de entrada y salida de datos: los más comunes son: teclado, monitor y caja de comandos
(teach pendant). Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador. Para mandar instrucciones al controlador y para dar de alta programas de control, comúnmente se utiliza una computadora adicional. Es necesario aclarar que algunos robots únicamente poseen uno de estos componentes. En estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones.
4. Dispositivos especiales: entre estos se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo.
CLASIFICACIÓN DE ACUERDO A LAS GENERACIONES
Clasificación de los robots basados en las generaciones de sistemas de control.
1. La primera generación: el sistema de control usado en la primera generación de robots está basado en
la "paradas fijas" mecánicamente. Esta estrategia es conocida como control de lazo abierto o control
"bang bang". Podemos considerar como ejemplo esta primera etapa aquellos mecanismos de relojería
que permiten mover a las cajas musicales o a los juguetes de cuerda. Este tipo de control es muy
similar al ciclo de control que tienen algunos lavadores de ciclo fijo y son equivalentes en principio al
autómata escribiente de h. m. son útiles para las aplicaciones industriales de tomar y colocar pero
están limitados a un número pequeño de movimientos.
2. La segunda generación: utiliza una estructura de control de ciclo abierto, pero en lugar de utilizar interruptores y botones mecánicos utiliza una secuencia numérica de control de movimientos almacenados en un disco o cinta magnética. El programa de control entra mediante la elección de secuencias de movimiento en una caja de botones o a través de palancas de control con los que se "camina", la secuencia deseada de movimientos. El mayor número de aplicaciones en los que se utilizan los robots de esta generación son de la industria automotriz, en soldadura, pintado con "spray". Este tipo de robots constituyen la clase más grande de robots industriales en EE.UU., incluso algunos autores sugieren que cerca del 90 % de los robots industriales en EU pertenecen a esta 2ª generación de control.
3. La tercera generación: de robots utiliza las computadoras para su estrategia de control y tiene algún conocimiento del ambiente local a través del uso de sensores, los cuales miden el ambiente y modifican su estrategia de control, con esta generación se inicia la era de los robots inteligentes y aparecen los lenguajes de programación para escribir los programas de control. La estrategia de control utilizada se denomina de "ciclo cerrado".
4. La cuarta generación de robots: ya los califica de inteligentes con más y mejores extensiones sensoriales, para comprender sus acciones y el mundo que los rodea. Incorpora un concepto de "modelo del mundo" de su propia conducta y del ambiente en el que operan. Utilizan conocimiento difuso y procesamiento dirigido por expectativas que mejoran el desempeño del sistema de manera que la tarea de los sensores se extiende a la supervisión del ambiente global, registrando los efectos de sus acciones en un modelo del mundo y auxiliar en la determinación de tareas y metas.
5. La quinta generación: actualmente está en desarrollo esta nueva generación de robots, que pretende que el control emerja de la adecuada organización y distribución de módulos conductuales, esta nueva arquitectura es denominada arquitectura de subsumición, cuyo promotor es Rodney Brooks
CLASIFICACIÓN DE LOS ROBOTS BASADA EN LA ASOCIACIÓN DE ROBOTS JAPONESA
La Asociación de Robots Japonesa (JIRA) ha clasificado a los robots dentro de seis clases sobre la base de su
nivel de inteligencia:
1. Dispositivos de manejo manual, controlados por una persona.
2. Robots de secuencia arreglada.
3. Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente.
4. Robots regeneradores, donde el operador humano conduce el robot a través de la tarea.
5. Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que
se enseñe manualmente la tarea.
6. Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
ESTRUCTURA DE UN ROBOT INDUSTRIAL
La idea común que se tiene de un robot industrial, es la de un brazo mecánico articulado, pero este elemento
no es más que una parte de lo que considera técnicamente un robot industrial.
Un sistema de robot industrial consta de las siguientes partes:
1. Manipulador o brazo mecánico.
2. Controlador
3. Elementos motrices o actuadores.
4. Elemento terminal. Herramienta o aprehensor.
5. Sensores de información en los robots inteligentes.
El manipulador
Recibe el nombre de manipulador o brazo de un robot, el conjunto de elementos mecánicos que propician el
movimiento del elemento terminal (aprehensor o herramienta). Dentro de la estructura interna del

manipulador se aloja, en muchas ocasiones, los elementos motrices, engranajes y transmisiones que soportan
el movimiento de las cuatro partes que, generalmente, suelen conformar el brazo:
a) Base o pedestal de fijación.
b) Cuerpo
c) Brazo
d) Antebrazo
Esquema del manipulador correspondiente al robot PUMA 600 de UNIMATION, con indicación
del nombre de sus elementos y el de sus articulaciones, así como la especificación de los
movimientos posibles.
Los cuatro elementos rígidos del brazo están relacionados entre sí mediante articulaciones, las cuales pueden
ser giratorias, cuando el movimiento permitido es el de rotación, o prismáticas, en las que existe un
movimiento de traslación entre los elementos que relacionan.
A semejanza con el brazo humano, a las uniones o articulaciones del manipulador se les denomina:
Unión del cuerpo (Base-Cuerpo).
Unión hombro (Cuerpo-Brazo).
Unión codo (Brazo-Antebrazo).
Unión muñeca (Antebrazo-Aprehensor).
El número de elementos del brazo y el de las articulaciones que los relacionan, determinan los grados de
libertad del manipulador, que en los robots industriales suelen ser 6, que coinciden con los movimientos
independientes que posicionan las partes del brazo en el espacio.
El controlador
Recibe este nombre el dispositivo que se encarga de regular el movimiento de los elementos del manipulador
y todo tipo de acciones, cálculos y procesado de información, que se realiza.
La complejidad del control varía según los parámetros que se gobiernan, pudiendo existir las siguientes
categorías:
a) Controlador de posición: solo interviene en el control de la posición del elemento terminal. Puede
actuar en modo punto a punto, o bien, en modo continuo, en cuyo caso recibe el nombre de control
continuo de trayectoria.
b) Control cinemático: cuando además de la posición se regula la velocidad.
c) Control dinámico: se tienen en cuenta, también, las propiedades dinámicas del manipulador, motores
y elementos asociados.
d) Control adaptativo: además de lo indicado en los anteriores controles, también se considera la
variación de las características del manipulador al variar la posición.
Los elementos motrices o actuadores
Los elementos motrices son los encargados de producir el movimiento de las articulaciones, bien
directamente o a través de poleas, cables, cadenas, etc. Se clasifican en tres grandes grupos, atendiendo a la
energía que utilizan:
a) Neumáticos
b) Hidráulicos
c) Eléctricos
Los actuadores neumáticos emplean el aire comprimido como fuente de energía y son muy indicados en el
control de movimientos rápidos, pero de precisión limitada.
Los motores hidráulicos son recomendables en los manipuladores que tienen una gran capacidad de carga,
junto a una precisa regulación de velocidad.
Finalmente, los motores eléctricos son los más utilizados, pos su fácil y preciso control, así como por otras
propiedades ventajosas que reporta su funcionamiento, como consecuencia del empleo de la energía
eléctrica.
El elemento terminal
A la muñeca del manipulador se acopla una garra o una herramienta, que será la encargada de materializar el
trabajo previsto.
Por lo general la problemática del elemento terminal radica en que ha de soportar una elevada capacidad de
carga y al mismo tiempo conviene que tenga reducido peso y tamaño.
Como consecuencia de la amplia variedad de tareas a las que se destinan los robots, el elemento terminal
adopta formas muy diversas. En bastantes ocasiones es necesario diseñar el elemento terminal a medida de la
operación que se aplica.
Sensores de información
Los robots de la última generación tienes capacidad para relacionarse con el entorno y tomar decisiones en
tiempo real, para adaptar sus planes de acción a las circunstancias exteriores. La información que reciben les
hace autoprogramables, o sea, alteran su actuación en función de la situación externa, lo que supone
disponer de un cierto grado de Inteligencia Artificial.
EJEMPLOS COMERCIALES
Con la intención de situar al lector en el entorno de los robots existentes en el mercado, se presentan a
continuación, las características y aplicaciones más sobresalientes de tres modelos de los cuales son de tipo
industria. Son:
1. Robot UNIMATE, modelo PUMA 760, UNIMATION:
Este modelo de robot industrial, fabricado por UNIMATION, se caracteriza por ser uno de mayores
dimensiones y capacidad de carga, entre los modelos PUMA: series 250/260, 500/600 y 550/560.
La capacidad de carga del PUMA 760 e de 10 kg y la precisión en la repetibilidad de movimientos
superior a los ± 0.2mm. Con una velocidad máxima de 1 m/s, el peso del manipulador es de 222 kg y el
del controlador de 175 kg.
Posee seis grados de libertad, coincidentes con el número de articulaciones giratorias que posee. Los
actuadores son 6 servomotores eléctricos de corriente continua. La alimentación necesaria es de 220-
440 V AC, a 50 Hz, con un consumo de 6.300 W. El aprehensor es de tipo neumático.
El controlador está basado en un sistema computador, tipo LSI-11. La programación puede efectuarse
en forma gestual, mediante pistola de programación.
Las aplicaciones del robot PUMA abarcan las siguientes áreas:
a) Montaje: especialmente indicados en series medias, cortas y unidad por unidad, en el ramo de
accesorios de automóvil, equipos eléctricos, programadores de electrodomésticos, tarjetas de
circuito impreso, juguetería, etc.
b) Soldadura: muy recomendable cuando es por arco.
c) Paletización
d) Atención de maquinaria.
e) Ensamblaje e inspección.
Robot PUMA
2. Sistema de robot industrial IRB 60/2
ASEA fabrica 3 versiones de robots industriales, con la misma estructura y diferentes capacidades de
carga:
a) IRB 6/2, de 6 kg.
b) IRB 60/2, de 60 kg.
c) IRB 90 S/2 (soldadura por puntos), de 90 kg.
El modelo IRB 60/2 está diseñado para manipular una carga de 60 kg, aunque en ciertas condiciones
puede soportar un peso mayor.
Tiene cinco o seis grados de libertad, dependiendo de la articulación utilizada en la muñeca
Las precisión en la repetición de los movimientos supera los ± 0.4 mm y alcanza una velocidad de 1.35
m/s en el movimiento vertical del brazo.
Los movimientos del robot se programan empleando la unidad de programación portátil. Cada
posición se va almacenando secuencialmente en la memoria, admite 470 punto en la versión básica,
pudiendo incrementar hasta 10, 300 con una memoria de masa auxiliar.
En caso de emergencia y corte de la energía eléctrica, el sistema dispone de una batería que mantiene
el contenido de la memoria hasta un periodo de 100 horas.
Las aplicaciones típicas del sistema IRB 60/2 son:
a) Acabado de piezas de fundición.
b) Desbarbado.
c) Pulido.
d) Corte de perfiles.
e) Montaje.
f) Manejo de materiales.
g) Alimentación de máquinas.
3. Sistema de fabricación IBM 7535 e IBM 7540
IBM se introdujo en 1979 en el campo de diseño sobre automatización industrial, con su primer
sistema CAD/ CAM, cuyo éxito condujo a la presentación de sus robots industriales en 1982, dedicado
al ensamblaje de piezas de pequeño tamaños, especialmente componente electrónicos.
En 1984 IBM ofrece en sus catálogos los sistemas 7535, 7540, 7545 y 7565, con los que ha logrado el
séptimo lugar del ranking mundial.
Tanto en el sistema 7535 como el 7540, constan de: manipulador, controlador y panel de mando,
diferenciándose entre ellos, fundamentalmente, en la capacidad de carga del brazo, que es de 25 kg en
el modelo 7540 y de 6 kg en el 7535.
El manipulador de estos dos sistemas posee dos elementos articulados, con cuatro grados de libertad.
El movimiento de las articulaciones del hombro y del codo se controla con dos servomotores de cc.
Los sistemas de fabricación IBM se han diseñado para atender aquellos trabajos que tengan
requerimientos más exigentes en cuanto velocidad y precisión, como:
a) Colocación de piezas de forma compleja.
b) Preparación de conjuntos
c) Taladro
d) Inserción y apretado de tornillos y tuercas
e) Paletización
f) Dibujo de patrones
g) Pulimentación
h) Grabado
i) Ensamblaje y montaje general.
APLICACIONES
El empleo de los robots se extiende por todo el mundo a un ritmo acelerado. Trabajos que hasta hace poco,
era inconcebible que los realizase una máquina, hoy día los efectúa un robot: tal es el caso del esquilado de
lana de las ovejas.
La extensión del conocimiento de la tecnología de los robots, aumenta su implantación en áreas y aplicaciones
diversas, pero hasta 1980 las tareas a las que se dedicaban, tenían un alto grado de estandarización y así,
según fuentes del SIRI y del CEAM, en 1979 casi el 60% del parque mundial de robots instalados, se aplicaban
a la carga y descarga y servicio a la maquinaria, sección en la que destacaban las siguiente labores:
Carga y descarga de máquinas de herramienta.
Maquinaria de moldeo por inyección
Estampación en frío.
Hornos.
Fundición y estampación en caliente.
Tratamientos térmicos.
Paletización.
Con referencias a las fuentes antes citadas, más del 30% de los robots instalados en el mundo se empleaban
en 1979 como máquinas que intervenían directamente en la elaboración y mecanizado del producto,
destacando los siguientes apartados en este grupo:
Soldadura por puntos.
Pintura
Soldadura por arco
Soldadura por resistencia
Pulverización a la llama
Forja, prensa y fundición
Esmaltado
Arenado
Encolado
Desbarbado
Pulido
Finalmente el resto de los robos instalados en 1979 se dedicaban al montaje y labores de inspección. En dicho
año la industria del automóvil ocupaba el 58% del parque mundial, siguiendo en importancia las empresas
constructoras de maquinaria eléctrica y electrónica.
EFECTORES FINALES
En robótica, el término de efector final se utiliza para describir la mano o herramienta que está unida a la
muñeca. El efector final representa el herramental especial que permite al robot de uso general realizar una
aplicación particular. Este herramental especial debe diseñarse específicamente para la aplicación.
Los efectores finales pueden dividirse en dos categorías: pinzas y herramientas. Las pinzas se utilizarían para
tomar un objeto, normalmente la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del robot. Hay una
diversidad de métodos de sujeción que pueden utilizarse, además de los métodos mecánicos obvios de
agarrar la pieza entre dos o más dedos. Estos métodos suplementarios incluyen el empleo de casquetes de
sujeción, imanes, ganchos, y cucharas.
Una herramienta se utilizaría como efector final en aplicaciones en donde se exija al robot realizar alguna
operación en la pieza de trabajo. Estas aplicaciones incluyen la soldadura por puntos, la soldadura por arco, a
la pintura por pulverización y las operaciones de taladro. En cada caso, la herramienta particular está unida a
la muñeca del robot para realizar la operación.
Se puede establecer una clasificación de los elementos terminales atendiendo así si se trata de un elemento
de sujeción o de una herramienta. Los primeros se pueden clasificar según el sistema de sujeción empleado.
Los elementos de sujeción se utilizan para agarrar y sostener los objetos y se suelen denominar pinzas. Se
distingue entre las que utilizan dispositivos de agarre mecánico y las que utilizan algún otro tipo de dispositivo
(ventosas, pinzas magnéticas, adhesivas, ganchos, etc.)
En la elección o diseño de una pinza se han de tener en cuenta diversos factores. Entre los que afectan al tipo
de objeto y de manipulación a realizar destacan el peso, la forma, el tamaño del objeto y la fuerza que es
necesario ejercer y mantener para sujetarlo. Entre los parámetros de la pinza cabe destacar su peso (que
afecta a las inercias del robot), el equipo de accionamiento y la capacidad de control.
El accionamiento neumático es el más utilizado por ofrecer mayores ventajas en simplicidad, precio y
fiabilidad, aunque presenta dificultades de control de posiciones intermedias. En ocasiones se utilizan
accionamientos de tipo eléctrico.
En la pinza se suelen situar sensores para detectar el estado de la misma (abierto o cerrado). Se pueden
incorporar a la pinza otro tipo de sensores para controlar el estado de la pieza, sistemas de visión que
incorporen datos geométricos de los objetos, detectores de proximidad, sensores fuerza par, etc.
Existen ciertos elementos comerciales que sirven de base para la pinza, siendo posible a partir de ellos diseñar
efectores válidos para cada aplicación concreta. Sin embargo, en otras ocasiones el efector debe ser
desarrollado íntegramente, constituyendo un coste un porcentaje importante dentro del total de la
aplicación.
En muchas ocasiones el robot ha de realizar operaciones que no consisten en manipular objetos, si no que
implica el uso de una herramienta. Aparte de estos elementos de sujeción y herramientas más o menos
convencionales, existen interesantes desarrollos e investigaciones, muchos de ellos orientados a la
manipulación de objetos complicados y delicados. Por ejemplo pinzas dotadas de tacto.
BIBLIOGRAFÍA
Tecnologías de la Información y de la Comunicación. Capítulo 6, Programación y control de procesos. Juan A. Alonso, Santiago Blanco A., Santiago Blanco S., Roberto escribano, Víctor R. González, Santiago Pascual, Amor Rodríguez. Editorial Ra-Ma 2004.
Control y Robótica. Tema: Fundamentos de robótica. Curso provincial. CFIE Valladolid II. Víctor R. González. Asesoría de Tecnología y FP.
Federación internacional de Robótica. Industrial Robots.
Robótica Práctica. Capítulo 1. Características generales y clasificación de los robots. Capítulo 2. Descripción de los robots. José M. Angulo Usategui. Editorial Paraninfo, cuarta edición, 1996.
Engelberger, J.F. : “Robotics in Practice”, Kogan Page, 1980.
Cuadernos CDTI: “Robótica Indutrial”, Ministerio de Industria y Energía. Septiembre 1982.
MESOGRAFÍA
Antecedentes de la robótica
http://www.info-ab.uclm.es/labelec/solar/electronica/introduccion/intro.htm
http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/historia.htm
Consultadas el día 10 de agosto de 2014
Robótica
http://virtual.itspa.edu.mx/Robotica/archivos/IntroduccionRobotica.pdf
Consultada el día 12 de agosto de 2014
Tipos de robots industriales
http://www.google.com.mx/url?sa=t&rct=j&q=&esrc=s&source=web&cd=9&sqi=2&ved=0CE8QFjAI&u
rl=http%3A%2F%2Fmateria-
caece.googlecode.com%2Fsvn%2Ftrunk%2FInvestigacion%2520de%2520Ingenieria%2FRoboticaIndust
rial%2FTrabajo%2FCapitulos%2F8%2520Tipos%2520de%2520Robots%2520Industriales.doc&ei=DszqU
5fACvOt8gGZ6IBY&usg=AFQjCNEi_-bgZ8RDRjdjn5hWreenHyvaYQ&bvm=bv.72938740,d.b2U
http://www.profesaulosuna.com/data/files/ROBOTICA/CUADROBOTICA/CUADROBO1Y2.pdf
Consultada el día 12 de agosto de 2014
Robots industriales
http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
http://www.monografias.com/trabajos6/larobo/larobo.shtml#ixzz3AElOahfI
Consultadas el día 13 de agosto de 2014
Estructura de un robot industrial
http://www.juntadeandalucia.es/averroes/iesalfonso_romero_barcojo/departamentos/tecnologia/uni
dades_didacticas/ud_controlroboticav1/morfologia%20de%20un%20robot.pdf
Consultada el 14 de agosto de 2014
Efectores finales
http://virtual.itspa.edu.mx/Robotica/archivos/Elementos-terminales.pdf
Consultada el 14 de agosto de 2014.
VIDEOS
Aplicaciones de robots industriales
https://www.youtube.com/watch?v=fH4VwTgfyrQ
Consultada el 13 de agosto de 2014
Related Documents



