Towards a Multi-Objective Capital Allocation within Data Centres Takfarinas Saber Anthony Ventresque Xavier Gandibleux Liam Murphy July 15, 2014 Saber et al. - IFORS’14 — Slide 1 of 24 Lero c 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Towards a Multi-Objective Capital
Allocation within Data Centres
Takfarinas Saber Anthony VentresqueXavier Gandibleux Liam Murphy
July 15, 2014
Saber et al. − IFORS’14 — Slide 1 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Outline of the Presentation
1 Multi-Objective Machine Reassignment Problem
2 Evaluation of State of the Art Techniques
3 Modification of GRASP
4 Next step of our Work: Hybrid Technique for MOMRP
5 Conclusion
Saber et al. − IFORS’14 — Slide 2 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Outline for Section 1
1 Multi-Objective Machine Reassignment Problem
2 Evaluation of State of the Art Techniques
3 Modification of GRASP
4 Next step of our Work: Hybrid Technique for MOMRP
5 Conclusion
Saber et al. − IFORS’14 — Slide 3 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Data Centre Optimisation
Capital allocators and other sort of operators in data centresperform optimisations of the infrastructure on a regular basis(e.g., every month).A high number of constraints apply on the placement ofservices (Capacity, conflicts, . . . ), which makes the data centreoptimisation a difficult problem: find the best possible solution.Even worse than that, the question we should ask is: what is agood solution?E.g., minimising the power consumption? The salary cost?The environmental impact? The reliability? Etc.→ need for a Multi-Objective Machine Reassignmentsolution.
Saber et al. − IFORS’14 — Slide 4 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
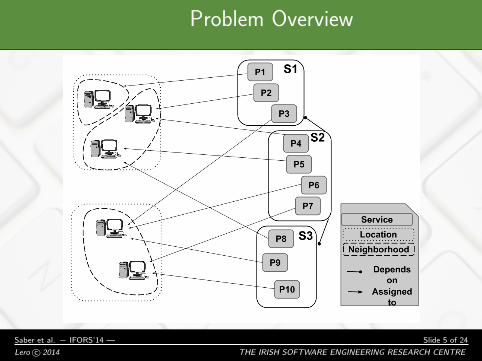
Problem Overview
Saber et al. − IFORS’14 — Slide 5 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Problem Formulation
We manage a set of VMs v ∈ V with different resourcerequirements dv ,r , initially hosted on machinesM0(v) ∈M with a capacity QM0(v),r .
Objective: assigning every VM v to a new machine M(v)(live migration).
We want to provide the decision-maker solutions (i.e.,reassignments) respecting the set of hard constraints &optimising the objectives
Saber et al. − IFORS’14 — Slide 6 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Constraints (1)
Capacity
Ensures that the capacity of the machine m ∈M satisfies therequirements of the VMs it hosts:∑
v∈V | M(v)=m
dv ,r ≤ Qm,r , ∀m ∈M,∀r ∈ R
Transient Resources
Transient resources (T R) are consumed twice during the livemigration: at the initial and final hosts (e.g. RAM, Disk):∑
v∈V|M0(v)=m∨M(v)=m
dv ,r ≤ Qm,r , ∀m ∈M, ∀r ∈ T R
Saber et al. − IFORS’14 — Slide 7 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Constraints (1)
Capacity
Ensures that the capacity of the machine m ∈M satisfies therequirements of the VMs it hosts:∑
v∈V | M(v)=m
dv ,r ≤ Qm,r , ∀m ∈M,∀r ∈ R
Transient Resources
Transient resources (T R) are consumed twice during the livemigration: at the initial and final hosts (e.g. RAM, Disk):∑
v∈V|M0(v)=m∨M(v)=m
dv ,r ≤ Qm,r , ∀m ∈M, ∀r ∈ T R
Saber et al. − IFORS’14 — Slide 7 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Constraints (2)
Anti-cohabitation
VMs are organised by services s ∈ S with anti-cohabitationconstraints (i.e., VMS cannot share the same host) for somereliability, security and performance reasons:
∀vi , vj ∈ V , i 6= j ,∀s ∈ S, (vi , vj) ∈ s2 ⇒ M(vi) 6= M(vj)
Dependency
Services can also depend on each other and in this case VMsof these services need to be close to each other (e.g., toincrease the performance of the system). We introduce herethe concept of neighbourhood N(m) of a machine m.
∀si , sj ∈ S, si ↪→ sj =⇒ ∀va ∈ si , ∃vb ∈ sj | N(M(va)) = N(M(vb))
Saber et al. − IFORS’14 — Slide 8 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Constraints (2)
Anti-cohabitation
VMs are organised by services s ∈ S with anti-cohabitationconstraints (i.e., VMS cannot share the same host) for somereliability, security and performance reasons:
∀vi , vj ∈ V , i 6= j ,∀s ∈ S, (vi , vj) ∈ s2 ⇒ M(vi) 6= M(vj)
Dependency
Services can also depend on each other and in this case VMsof these services need to be close to each other (e.g., toincrease the performance of the system). We introduce herethe concept of neighbourhood N(m) of a machine m.
∀si , sj ∈ S, si ↪→ sj =⇒ ∀va ∈ si , ∃vb ∈ sj | N(M(va)) = N(M(vb))
Saber et al. − IFORS’14 — Slide 8 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Constraints (3)
Spread
Some services require their VMs to be spread over differentlocations l ∈ L. This allows increasing the resilience in case offailure of a data centre: the bigger the spread number, thesafer the service:∑
l∈L min (1, |{v | v ∈ s ∧ M(v) ∈ l}|) ≥ spreadNumbers , ∀ s ∈ S
Saber et al. − IFORS’14 — Slide 9 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Objectives
(1) The cost of migrating v from M0(v) to M(v) is:
relocation = µ1(p,Mo(p)) + µ2(p,Mo(p),M(p)) + µ3(p,M(p))
(2) m ∈M is reliable if it is not loaded more than a reliabilityvalue ρ(m, r) for each resource r ∈ R:
reliability(m) =∑r∈R
max
0 ,∑
v∈V|M0(v)=m∨M(v)=m
dp,r − ρ(m, r)
(3) The electricity cost of m ∈M in l ∈ L depends on αm, βm(electricity consumption constants) and γl (electricity cost in l):
electricity(m) = γl ×
(αm ×
∑p∈P|M(p)=m
dp,CPU + βm
)if m is running
0 otherwise
Saber et al. − IFORS’14 — Slide 10 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Outline for Section 2
1 Multi-Objective Machine Reassignment Problem
2 Evaluation of State of the Art Techniques
3 Modification of GRASP
4 Next step of our Work: Hybrid Technique for MOMRP
5 Conclusion
Saber et al. − IFORS’14 — Slide 11 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
State-of-the-art
We compare our evaluation three different types of algorithms:
First-Fit family
First Fit (FF), Random Fit (RF) and First Fit DescentBin-Balancing (BB).
Metaheuristics
GRASP, NSGA (NSGA-II) and PLS.
Random reassignment (R)
To feel the hardness of the instances.
Saber et al. − IFORS’14 — Slide 12 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
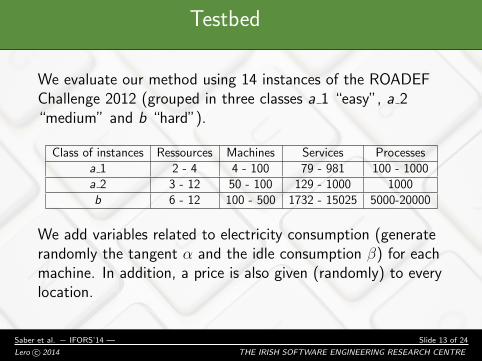
Testbed
We evaluate our method using 14 instances of the ROADEFChallenge 2012 (grouped in three classes a 1 “easy”, a 2“medium” and b “hard”).
Class of instances Ressources Machines Services Processesa 1 2 - 4 4 - 100 79 - 981 100 - 1000a 2 3 - 12 50 - 100 129 - 1000 1000b 6 - 12 100 - 500 1732 - 15025 5000-20000
We add variables related to electricity consumption (generaterandomly the tangent α and the idle consumption β) for eachmachine. In addition, a price is also given (randomly) to everylocation.
Saber et al. − IFORS’14 — Slide 13 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
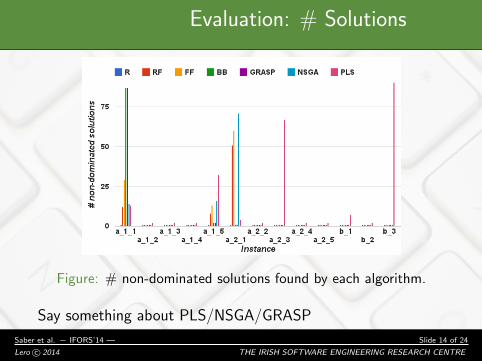
Evaluation: # Solutions
Figure: # non-dominated solutions found by each algorithm.
Say something about PLS/NSGA/GRASP
Saber et al. − IFORS’14 — Slide 14 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
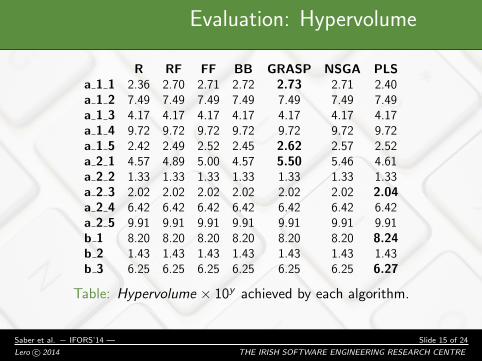
Evaluation: Hypervolume
R RF FF BB GRASP NSGA PLSa 1 1 2.36 2.70 2.71 2.72 2.73 2.71 2.40a 1 2 7.49 7.49 7.49 7.49 7.49 7.49 7.49a 1 3 4.17 4.17 4.17 4.17 4.17 4.17 4.17a 1 4 9.72 9.72 9.72 9.72 9.72 9.72 9.72a 1 5 2.42 2.49 2.52 2.45 2.62 2.57 2.52a 2 1 4.57 4.89 5.00 4.57 5.50 5.46 4.61a 2 2 1.33 1.33 1.33 1.33 1.33 1.33 1.33a 2 3 2.02 2.02 2.02 2.02 2.02 2.02 2.04a 2 4 6.42 6.42 6.42 6.42 6.42 6.42 6.42a 2 5 9.91 9.91 9.91 9.91 9.91 9.91 9.91b 1 8.20 8.20 8.20 8.20 8.20 8.20 8.24b 2 1.43 1.43 1.43 1.43 1.43 1.43 1.43b 3 6.25 6.25 6.25 6.25 6.25 6.25 6.27
Table: Hypervolume × 10y achieved by each algorithm.
Saber et al. − IFORS’14 — Slide 15 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Outline for Section 3
1 Multi-Objective Machine Reassignment Problem
2 Evaluation of State of the Art Techniques
3 Modification of GRASP
4 Next step of our Work: Hybrid Technique for MOMRP
5 Conclusion
Saber et al. − IFORS’14 — Slide 16 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
GRASP
Description
The constructive phase of GRASP is based on the sorting ofthe VMs according to their dependancy and requirements, andtheir assignment to a random util machine.
Problem
The function of GRASP (the original version), allows thereassignment of all processes without limitation. This hasseveral chain reactions:
No reassignments limitation induces more transientresource consumption.
Means more risk of constraint violation.
Implies less feasible solutions found.
Saber et al. − IFORS’14 — Slide 17 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Modification of GRASP
Proposed solution
A limitation of one percent reassignment is taken in order toavoid the consumption of a lot of resources. This number(1%) has to be computed in a cleverer way (using bounds).
Saber et al. − IFORS’14 — Slide 18 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
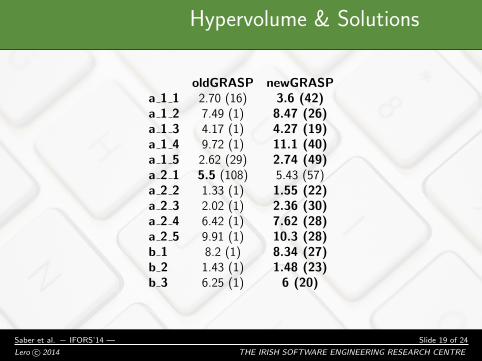
Hypervolume & Solutions
oldGRASP newGRASPa 1 1 2.70 (16) 3.6 (42)a 1 2 7.49 (1) 8.47 (26)a 1 3 4.17 (1) 4.27 (19)a 1 4 9.72 (1) 11.1 (40)a 1 5 2.62 (29) 2.74 (49)a 2 1 5.5 (108) 5.43 (57)a 2 2 1.33 (1) 1.55 (22)a 2 3 2.02 (1) 2.36 (30)a 2 4 6.42 (1) 7.62 (28)a 2 5 9.91 (1) 10.3 (28)b 1 8.2 (1) 8.34 (27)b 2 1.43 (1) 1.48 (23)b 3 6.25 (1) 6 (20)
Saber et al. − IFORS’14 — Slide 19 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Outline for Section 4
1 Multi-Objective Machine Reassignment Problem
2 Evaluation of State of the Art Techniques
3 Modification of GRASP
4 Next step of our Work: Hybrid Technique for MOMRP
5 Conclusion
Saber et al. − IFORS’14 — Slide 20 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
GeNePi
A three steps method
Find some quick solutions, good or not, as seeds (kind ofgreedy search).
Find a lot of good solutions on all directions in order tocover a lot of space (genetic algorithm).
Refine around the found solutions to increase the numberof solutions (local search).
Implementation
We developed a hybrid-metaheuristic based on the successionof (i) the adapted GRASP, (ii) NSGA-II and (iii) PLS.
Saber et al. − IFORS’14 — Slide 21 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
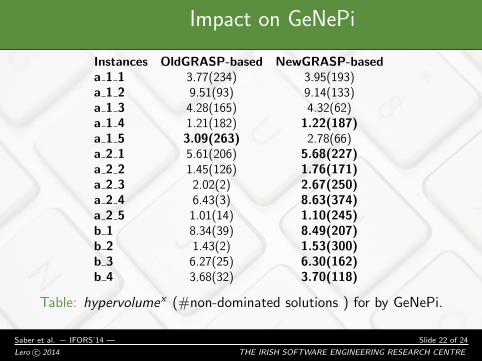
Impact on GeNePi
Instances OldGRASP-based NewGRASP-baseda 1 1 3.77(234) 3.95(193)a 1 2 9.51(93) 9.14(133)a 1 3 4.28(165) 4.32(62)a 1 4 1.21(182) 1.22(187)a 1 5 3.09(263) 2.78(66)a 2 1 5.61(206) 5.68(227)a 2 2 1.45(126) 1.76(171)a 2 3 2.02(2) 2.67(250)a 2 4 6.43(3) 8.63(374)a 2 5 1.01(14) 1.10(245)b 1 8.34(39) 8.49(207)b 2 1.43(2) 1.53(300)b 3 6.27(25) 6.30(162)b 4 3.68(32) 3.70(118)
Table: hypervolumex (#non-dominated solutions ) for by GeNePi.
Saber et al. − IFORS’14 — Slide 22 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Conclusion
Reassigning processes to servers automatically is complex,large scale for most of the real instances and needs toconsider different objectives.
We defined the multi-objective machine reassignmentproblem and analysed the performance of differentalgorithms in terms of hypervolume and number ofnon-dominated solutions.
We propose an adaptation of GRASP for this problemand shows that it suits well the problem.
Integrated to GeNePi, it is very promising.
Saber et al. − IFORS’14 — Slide 23 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Thank you for your attention!Any questions?
Acknowledgement: This work was supported, in part, by ScienceFoundation Ireland grant 10/CE/I1855 to Lero - the Irish SoftwareEngineering Research Centre (www.lero.ie).
Saber et al. − IFORS’14 — Slide 24 of 24
Lero c© 2014 THE IRISH SOFTWARE ENGINEERING RESEARCH CENTRE
Related Documents











