TOPOLOGY P. Veeramani Department of Mathematics Indian Institute of Technology Madras Chennai - 600 036.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
TOPOLOGY
P. Veeramani
Department of Mathematics
Indian Institute of Technology Madras
Chennai - 600 036.

Contents
1 Topological Spaces 3
1.1 Basic Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 The Metric Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Interior Points, Limit Points, Boundary Points, Closure of a Set . . . 15
1.4 Hausdorff Topological Spaces . . . . . . . . . . . . . . . . . . . . . . 19
1.5 Continuous Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Product and Quotient Spaces 35
2.1 Product Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2 The Box Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.3 Quotient (Identification) Spaces . . . . . . . . . . . . . . . . . . . . . 44
3 Connected Topological Spaces 53
3.1 Connected Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2 Connected Subsets of the Real Line . . . . . . . . . . . . . . . . . . 54
3.3 Some Properties of Connected Spaces . . . . . . . . . . . . . . . . . . 56
3.4 Connected Components . . . . . . . . . . . . . . . . . . . . . . . . . 65
4 Compact Topological Spaces 77
4.1 Compact Spaces and Related Results . . . . . . . . . . . . . . . . . . 77
4.2 Local Compactness . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.3 One Point Compactification of a Topological Space (X,J ) . . . . . . 88
1

4.4 Tychonoff Theorem for Product Spaces . . . . . . . . . . . . . . . . . 93
5 Countability and Separation Axioms 111
5.1 First and Second Countable Topological Spaces . . . . . . . . . . . . 111
5.2 Properties of First Countable Topological Spaces . . . . . . . . . . . 119
5.3 Regular and Normal Topological Spaces . . . . . . . . . . . . . . . . 122
5.4 Urysohn Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.5 Tietze Extension Theorem . . . . . . . . . . . . . . . . . . . . . . . . 132
5.6 Baire Category Theorem . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.7 Urysohn Metrization Theorem . . . . . . . . . . . . . . . . . . . . . . 138
2

Chapter 1
Topological Spaces
1.1 Basic Concepts
We start with the assumption that we intuitively understand what is meant
by a set. For us, set is a collection of well defined objects. We have a set X and let
J be a collection of subsets of X satisfying:
• (T1) φ ∈ J , X ∈ J , where φ is the empty set (or say null set).
• (T2) Suppose we have an arbitrary nonempty set J and to each α ∈ J
we have a subset Aα of X such that Aα ∈ J , then our J has the property that
∪α∈J
Aα ∈ J , where ∪α∈J
Aα = {x ∈ X : x ∈ Aα for at least one α ∈ J}.
• (T3) If A1, A2 are in J then A1∩ A2 is also in J (that is A1, A2 ∈ J implies
A1 ∩ A2 ∈ J ).
In such a case, the given collection J is called a topology on X and the pair
(X, J ) is called a topological space.
Remark 1.1.1. If A is a member of J and x ∈ A then we say that A is a
neighbourhood (also known as open neighbourhood) of x. That is for each x in X, J
contains the collection Nx = {U ∈ J : x ∈ U} of all open neighbourhoods of x. �
Suppose we are given a set X. Now our aim is to find collections B and J of
subsets of X satisfying:
(i) B ⊆ J , (ii) J satisfies (T1), (T2), (T3), and (iii) J = {U ⊆ X : x ∈ U implies
there exists B ∈ B such that x ∈ B ⊆ U}.
3
In such a case, J is said to be a topology on X generated by the collection B and B
is said to be a basis for the topology J . Each member of J is called an open subset
of X and each member of B is called an essential neighbourhood or a basic open set
in X. Since X ∈ J , by (iii) for each x ∈ X there exists B ∈ B such that x ∈ B.
Also note that if B1, B2 ∈ B then B1 ∩ B2 ∈ J . Hence for any x ∈ B1 ∩ B2 there
exists B3 ∈ B such that x ∈ B3 ⊆ B1 ∩B2. Therefore B satisfies the following:
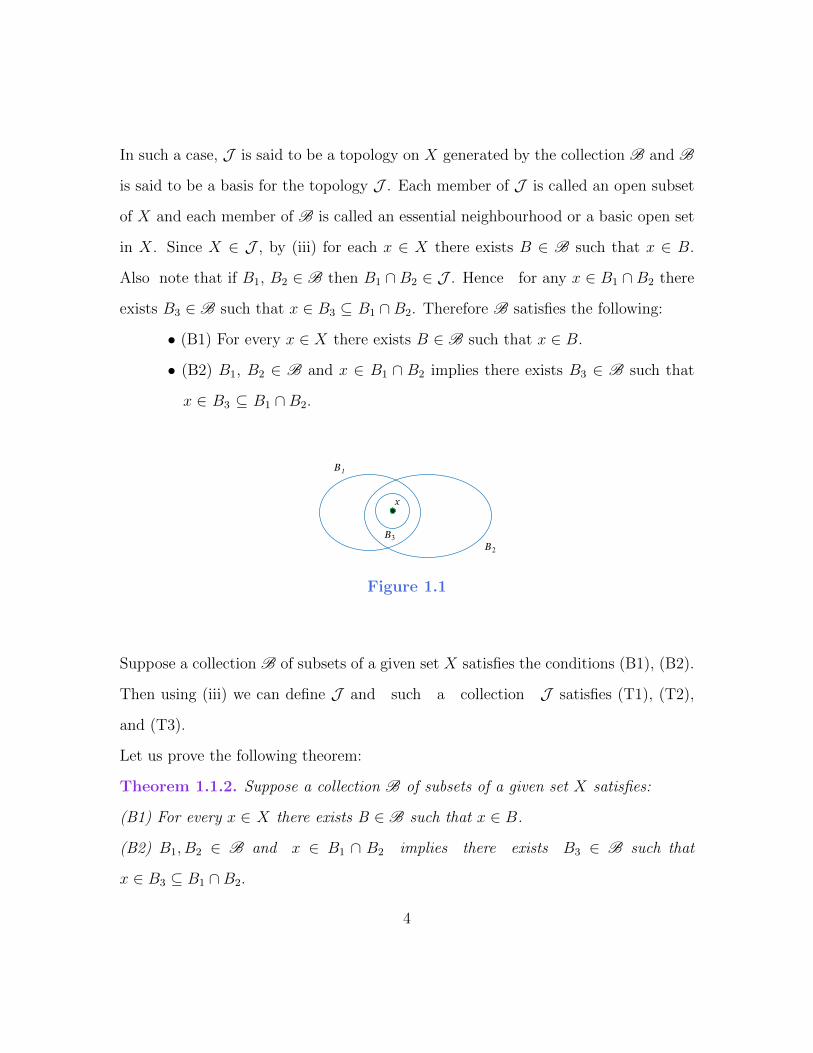
• (B1) For every x ∈ X there exists B ∈ B such that x ∈ B.
• (B2) B1, B2 ∈ B and x ∈ B1 ∩ B2 implies there exists B3 ∈ B such that
x ∈ B3 ⊆ B1 ∩B2.
x
BB
B1
32
Figure 1.1
Suppose a collection B of subsets of a given set X satisfies the conditions (B1), (B2).
Then using (iii) we can define J and such a collection J satisfies (T1), (T2),
and (T3).
Let us prove the following theorem:
Theorem 1.1.2. Suppose a collection B of subsets of a given set X satisfies:
(B1) For every x ∈ X there exists B ∈ B such that x ∈ B.
(B2) B1, B2 ∈ B and x ∈ B1 ∩ B2 implies there exists B3 ∈ B such that
x ∈ B3 ⊆ B1 ∩B2.
4

Then the collection J defined as J = {U ⊆ X : x ∈ U implies there exists B ∈ B
such that x ∈ B ⊆ U } is a topology on X.
Proof. To prove (T1): From (B1), x ∈ X implies there exists B ∈ B such that
x ∈ B ⊆ X. Hence by the definition of J , X ∈ J . Now we will have to prove that
the null set φ ∈ J . How to prove? Our statement namely x ∈ U implies there exists
B ∈ B such that x ∈ B ⊆ U is a conditional statement. That is, we have statements
say p and q. Now consider the truth table
p q p ⇒ q
T T T
T F F
F T T
F F T
The so-called null set φ (or empty set) is a subset of X. Whether φ satisfies the stated
property? What is the stated property with respect to our set φ? If x ∈ φ then there
exists B ∈ B such that x ∈ B ⊆ φ, where are we in the truth table? Whether there
is x ∈ φ? The answer is no. So our statement x ∈ φ is false. In such a case whether
q is true or false it does not matter and p ⇒ q is true. So the conclusion is that the
null set φ has the stated property, therefore by the definition of J , φ ∈ J .
To prove (T2): Suppose J is a nonempty set and for each α ∈ J , Aα ∈ J . Now we
will have to prove that ∪α∈J
Aα ∈ J .
If ∪α∈J
Aα = φ, then φ ∈ J (follows from (T1)). So let us assume that
∪α∈J
Aα 6= φ. Let x ∈ ∪α∈J
Aα, then there exists α0 ∈ J such that x ∈ Aα0 .
Now x ∈ Aα0 and Aα0 ∈ J therefore by the definition of J there exists B ∈ B such
5

that x ∈ B ⊆ Aα0 . But Aα0 ⊆ ∪α∈J
Aα. Hence x ∈ ∪α∈J
Aα implies there exists B ∈ B
such that x ∈ B ⊆ ∪α∈J
Aα (since x ∈ B ⊆ Aα0).
Therefore by the definition of J , ∪α∈J
Aα ∈ J . That is, if J is a nonempty set
and Aα ∈ J for all α ∈ J then ∪α∈J
Aα ∈ J .
To prove (T3): Let A1, A2 ∈ J . Again if A1∩A2 = φ then by (T1), φ ∈ J and hence
A1 ∩ A2 ∈ J .
Suppose A1 ∩ A2 6= φ. Now let x ∈ A1 ∩ A2 then x ∈ A1 and
x ∈ A2. Now x ∈ A1, A1 ∈ J implies there exists B1 ∈ B so that x ∈ B1 ⊆ A1.
Also x ∈ A2, A2 ∈ J implies there exists B2 ∈ B such that x ∈ B2 ⊆ A2. Now
B1, B2 ∈ B are such that x ∈ B1 ∩ B2. Hence by (B2) there exists B3 ∈ B such
that x ∈ B3 ⊆ B1 ∩ B2. But B1 ∩ B2 ⊆ A1 ∩ A2. Hence B3 ∈ B is such that
x ∈ B3 ⊆ A1 ∩ A2.
That is x ∈ A1 ∩ A2 implies there exists B3 ∈ B such that x ∈ B3 ⊆ A1 ∩ A2
implies A1 ∩ A2 ∈ J (by the definition of J ). Now J satisfies (T1), (T2), (T3) and
therefore J is a topology on X. �
Remark 1.1.3. The topology J defined as in theorem 1.1.2 is called the topology
generated by B. If we want to define a topology on a set X then we search for a
collection B of subsets of X satisfying (B1), (B2) and once we know such a collection
B then we know how to get the topology generated by B. Such a collection B is
called a basis for a topology on X and the topology generated by B is normally
denoted by JB. �
Definition 1.1.4. If B is a collection of subsets of a given set X satisfying (B1),
(B2) then B is called a basis for a topology on X.
6

1.2 The Metric Topology
Let X be a nonempty set and (x, y) ∈ X × X. With each (x, y) ∈ X × X we
associate a non-negative real number which we denote by d(x, y). We want to identify
d(x, y) as the distance between the elements x, y in X. So it is natural to expect that
• (M1) d(x, y) = 0 if and only if x = y;
• (M2) d(x, y) = d(y , x ) for all x, y ∈ X;
• (M3) d(x, y) ≤ d(x, z) + d(z, y) for all x, y, z ∈ X.
It is to be noted that to each element (x, y) in X × X we associate a unique element
d(x, y) in R+ = [0, ∞). That is d(x, y) is the image of (x, y) ∈ X × X. Hence d is a
function from X × X into R+ i.e. d : X × X → R+.
If X is a nonempty set and d : X × X → R+ is a function satisfying the above
conditions (M1), (M2), (M3) then we say that d is a metric on X. In such a case, the
pair (X, d) is called a metric space.
Let us fix x ∈ X. Now we want to collect all those elements of the space X
which are not far away from x and such a set is known as a neighbourhood of x.
Well, what do you mean by “not far away from x”? The term “not far away” is a
relative term. So we fix an r > 0 (in some sense radius of our neighbourhood) and
then take an element, say y from X. If the distance between x and y is strictly less
than r, that is d(x, y) < r, then we say that y is in our neighbourhood of x. Let us
define B(x, r) = {y ∈ X : d(x, y) < r}, and call this set as one of our neighbourhoods
of x. If we change r, we get different neighbourhoods of x and B(x, r) is also known
as the ball centered at x and radius r. When X = R3 and d, the distance function,
is the usual Euclidean distance, i.e. for any x = (x1, x2, x3), y = (y1, y2, y3) ∈ R3
7

d(x, y) =√
(x1 − y1)2 + (x2 − y2)2 + (x3 − y3)2, then B(x, r) is the usual Euclidean
ball centered at x and radius r > 0.
Remark 1.2.1. One can have different metrics on R3 (or Rn, n ≥ 1) and for
x = (x1, x2, x3) ∈ R3, r > 0, B(x, r) may be a cube or a solid sphere or an ellipsoid
(excluding the points on the boundary) or a singleton {x} or the whole space R3 under
suitable metrics. Now consider a subset A of X. Suppose A has the property: if
x ∈ A then there exists at least one neighbourhood of x say B(x, r) which is contained
in our set A. That is, x ∈ A implies there exists r > 0 such that B(x, r) ⊆ A (such a
r > 0 depends on x ∈ A. i.e. same r may not work for every x ∈ A). �
Note. Our statement namely x ∈ A implies there exists r > 0 such that B(x, r) ⊆ A
is a conditional statement. The so-called empty set (or null set) φ is a subset of our
space X. Whether empty set φ has the stated property? What is the stated property?
Well, following the same argument as given in theorem 1.1.2 we see that φ has the
stated property. Now it is easy (if not obvious) to prove:
• X has the stated property.
• A,B ⊆ X such that A,B have the stated property then A ∩ B has the stated
property.
• Consider a nonempty set J . Suppose for each α ∈ J,Aα ⊆ X and Aα has the
stated property, then ∪α∈J
Aα has the stated property. That is the collection
Jd defined as Jd = {A ⊆ X : x ∈ A implies there exists r > 0 such that
B(x, r) ⊆ A} is a topology on X, known as the topology induced by the given
metric d.
In this sense we say that every metric space (X, d) is a topological space. ?
8

Theorem 1.2.2. In a metric space (X, d) for each x ∈ X, r > 0, B(x, r) is an open
subset of (X, Jd).
Proof. Let y ∈ B(x, r). Then d(x, y) < r. Let s = r − d(x, y). If z ∈ B(y, s),
then d(y, z) < s = r − d(x, y). So d(x, y) + d(y, z) < r. By the triangle inequality,
d(x, z) < r. That is z ∈ B(x, r). Thus B(y, s) ⊂ B(x, r). Hence B(x, r) is open. �
It is interesting to note that B = {B(x, r) : x ∈ X, r > 0} is a basis for a
topology on X and it is clear from the definition of Jd that the topology JB generated
by B is same as Jd.
Now let us give some important examples of topological spaces.
Let X be a set and let Jt = {φ,X}, JD = { A : A is subset of X },
Jf = {A : XKA = Ac is a finite subset of X or Ac = X}, Jc = {A : XKA is
a countable subset of A or Ac = X}. It is easy to prove that Jt, JD, Jf , Jc are
topological spaces on X, Jt is known as the trivial or indiscrete topology on X, JD
is known as the discrete topology on X, Jf is known as the cofinite topology on X,
Jc is known as the co-countable topology on X.
Recall that a set A is a countable set if and only if A is a finite set or A is a
countably infinite set. Also note that A is a countably infinite set if and only if there
exists a bijective function f from N to A, where N is the set of all natural numbers.
Also it is known that a nonempty set A is a countable set if and only if there exists
a surjective function say f : N→ A.
Now let us prove that Jc = {A : XKA is a countable subset of A or Ac = X}
is a topology on X.
9

Proof. Now φc = X implies φ ∈ Jc, Xc = φ and φ is a countable set implies X ∈ Jc.
Hence
φ, X ∈ Jc. (1.1)
Let J be a nonempty set and for each α ∈ J , Aα ∈ Jα.
Claim: ∪α∈J
Aα ∈ Jc.
Now ( ∪α∈J
Aα)c = ∩α∈J
Acα. Hence we will have to prove that either ∩α∈J
Acα = X or
∩α∈J
Acα is a countable subset of X. If ∩α∈J
Acα = X then we are through (from (T1)).
Suppose not. This implies for at least one α0 ∈ J , Acα06= X, Aα0 ∈ Jc implies Acα0
is
a countable set. Since ∩α∈J
Acα ⊆ Acα0, ∩α∈J
Acα is a countable set (subset of a countable
set is countable). We have proved that either ∩α∈J
Acα = X or ∩α∈J
Acα is a countable
set. Hence
∪α∈J
Aα ∈ Jc. (1.2)
Let A1, A2 ∈ Jc implies that Ac1 is a countable set or Ac1 = X and A2 ∈ Jc implies
Ac2 is a countable set or Ac2 =X. Now(A1∩ A2
)c= Ac1 ∪ Ac2 = X when Ac1 or Ac2 =
X or Ac1 ∪Ac2 is a countable set since in this case both Ac1 and Ac2 are countable sets.
Hence(A1 ∩ A2
)c= X or it is a countable set. This implies that
A1 ∩ A2 ∈ Jc. (1.3)
From Eqs. (1.1), (1.2), and (1.3), Jc is a topology on X. Now let us give some
examples to illustrate the natural way of obtaining topologies once we know bases
satisfying (B1) and (B2). �
Example 1.2.3. Let X be a nonempty set and B = {{x} : x ∈ X}. Then B is a
basis for a topology on X.
10
(i) For every x ∈ X there exists B = {x} ∈ B such that x ∈ B.
(ii) B1, B2 ∈ B and x ∈ B1 ∩ B2 implies there exists B3 = {x} ∈ B such that
x ∈ B3 ⊆ B1 ∩ B2. Hence both (B1) and (B2) are satisfied. This implies that the
collection B = {{x} : x ∈ X} is a basis for a topology on X.
Now let us find out JB, the topology, generated by B. In theorem 1.1.2 we
have proved that if we define JB as JB = {U ⊆ X : x ∈ U implies there exists
B ∈ B such that x ∈ B ⊆ U} is a topology on X.
In this case for any nonempty subset U of X, x ∈ U implies there exists
B = {x} such that x ∈ B ⊆ U. Hence by the definition of JB, A ∈ B whenever A is
a nonempty subset of X. Also the null set φ ∈ JB (recall the proof given in theorem
1.1.2). Hence A ⊆ X implies A ∈ JB implies P(X) ⊆ JB. Also by the definition,
JB ⊆ P(X), the collection of all subsets of X. This implies that JB is same as the
discrete topology JD defined on X.
Exercise 1.2.4. Let X be a nonempty set and let d be a metric on X. That is (X, d)
is a given metric space. Then prove that the collection B defined as B = {B(x, r) :
x ∈ X, r > 0} is a basis for Jd. 2
Now let us consider the special case X = R, the set of all real numbers and
d(x, y) = |x − y| for x, y ∈ R. Then d is a metric on R. What is the collection
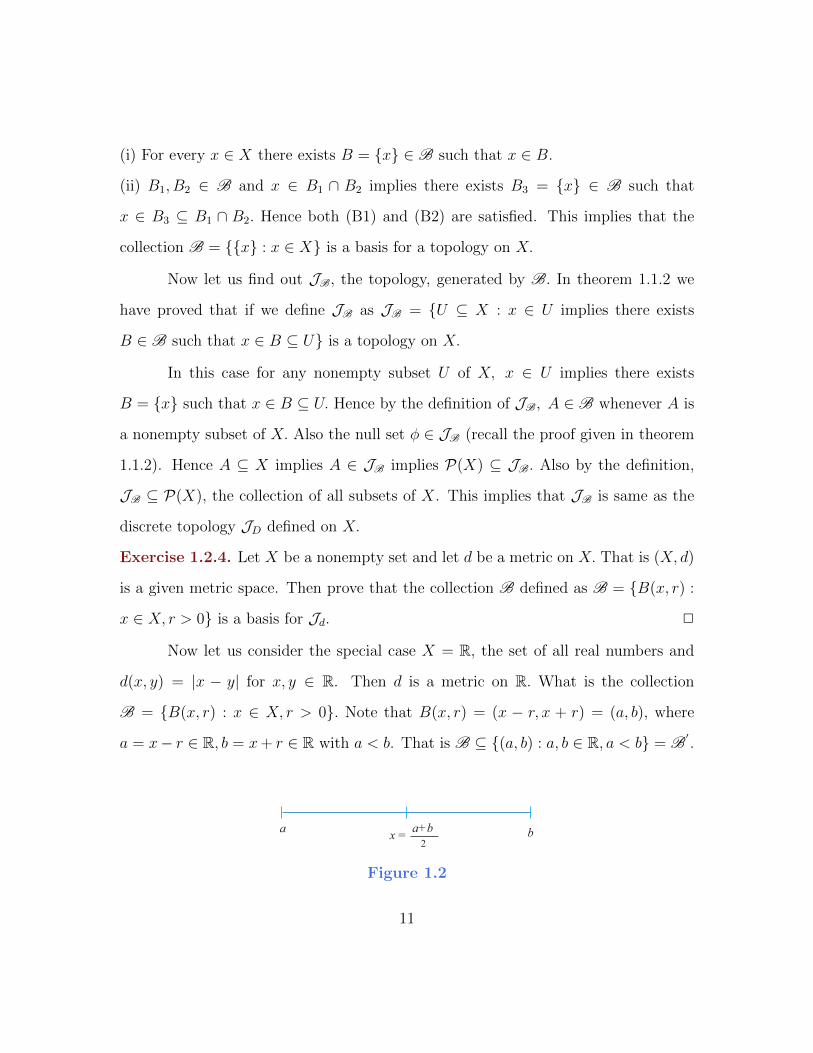
B = {B(x, r) : x ∈ X, r > 0}. Note that B(x, r) = (x − r, x + r) = (a, b), where
a = x− r ∈ R, b = x+ r ∈ R with a < b. That is B ⊆ {(a, b) : a, b ∈ R, a < b} = B′.
a b a+b2
x =
Figure 1.2
11

On the other hand take a member say B ∈ B′. Since B ∈ B′ there exist
a, b ∈ R, a < b such that B = (a, b). Now let x = a+b2
and r = |a−b2| = b−a
2> 0. Then
B(x, r) = (x− r, x+ r) =(a+b2− b−a
2, a+b
2+ b−a
2
)= (a, b) implies (a, b) = B(x, r) ∈ B
implies B′ ⊆ B. Also we have B ⊆ B
′and hence B = {B(x, r) : x ∈ R, r > 0} =
{(a, b) : a, b ∈ R, a < b} = B′. That is
{(a, b) : a, b ∈ R, a < b
}is basis for a topology
on R and JB = Jd. This topology is called the standard or usual topology on R, and
it is denoted by Js.
Exercises 1.2.5. (i) Prove that BQ = {(a, b) : a, b ∈ Q, a < b}, where Q - the set of
all rational numbers is also a basis for the usual topology on R. That is JBQ is same
as the usual topology on R.
(ii) Is B0 = {B(x, 1n) : x ∈ Q, n ∈ N} a basis for the usual topology on R? Justify
your answer.
(iii) It is given that (X, d) is a metric space. Now prove that B′ = {B(x, 1n) :
x ∈ X,n ∈ N} is a basis for a topology on X. Also prove that JB′ = Jd. 2
Definition 1.2.6. A subset A of a topological space (X, d) is said to be a closed
set if the complement XKA = Ac of A is an open set.
Use the DeMorgan’s law to prove the following theorem.
Theorem 1.2.7. In a topological space (X, J ) we have:
(i) X and φ are closed.
(ii) Suppose we have a nonempty index set J and to each α ∈ J , Aα is a closed subset
of X. Then ∩α∈J
Aα is a closed subset of X. That is arbitrary intersection of closed sets
is closed.
(iii) If A1, A2 are closed sets then A1 ∪ A2 is also a closed set.
Use induction to prove that finite union of closed sets is closed.
12

Now let us prove the following theorem which tells us when a subcollection B
of a given topology J on X generates the topology J .
Theorem 1.2.8. Let (X,J ) be a topological space and B ⊆ J . Further suppose for
each A ∈ J and x ∈ A there exists B ∈ B such that x ∈ B ⊆ A. Then B is a basis
for a topology on X and JB = J .
Proof. First let us prove that B is a basis for a topology on X.
(B1) Let x ∈ X. Since X ∈ J , by hypothesis, there exists B ∈ B such that x ∈ B.
(B2) Let B1, B2 ∈ B and x ∈ B1 ∩ B2. It is given that B ⊆ J . Hence B1, B2 ∈ J
and this implies B1∩B2 ∈ J . Now x ∈ B1∩B2 and B1∩B2 ∈ J implies there exists
B3 ∈ B such that x ∈ B3 ⊆ B1 ∩ B2. From (B1) and (B2) we see that B is a basis
for a topology on X.
b
x
B2
1
B2
b1
a1 a2
Figure 1.3
Now let us prove that JB = J . Let U ∈ JB.
Claim: U ∈ J . If U = φ then this implies that U ∈ J . Otherwise let x ∈ U. By the
definition of JB there exists Bx ∈ B ⊆ J such that x ∈ Bx ⊆ U . This implies that
∪x∈U
Bx = U and hence U ∈ J .
13

Conversely, let φ 6= U ∈ J . Then for each x ∈ U there exists B ∈ B ⊆ JB
such that x ∈ B ⊆ U. This proves that ∪x∈U
Bx = U ∈ JB. Hence J ⊆ JB. Already
we have proved that JB ⊆ J and therefore J = JB. �
Now it is natural to introduce the following definition.
Definition 1.2.9. If (X,J ) is a topological space and B ⊆ J such that for each
A ∈ J and x ∈ A there exists B ∈ B such that x ∈ B ⊆ A, then we say that B is a
basis for J .
Theorem 1.2.10. Let (X,J ) be a topological space and B ⊆ J . Then B is a basis
for J if and only if every member A of J is the union of member of some subcollection
of B.
Proof. Left as an exercise. �
To have a feeling of this concept do the following exercise:
Exercise 1.2.11. For a1, a2, b1, b2 ∈ R, a1 < a2, b1 < b2 let R = {(x1, x2) ∈ R2 :
a1 < x1 < a2, b1 < x2 < b2}. That is, R is an open rectangle having sides parallel
to the coordinate axes. Let B be the collection of all such open rectangles. Now it
is easy to see that B is a basis for the topology Jd on R2, where d is the Euclidean
metric on R2. 2
Remark 1.2.12. Let X be a set and S be a collection of subsets of X. Suppose
∪A∈S
A = X. Then we say that S is a subbasis for a topology on X. In this case, let
B = {A ⊆ X : A = ∩B∈F
B, for a finite subcollection F of S}. Then it is easy to
prove that B is a basis for a topology on X. The topology JB generated by B is
called the topology on X generated by the subbasis S. �
Exercises 1.2.13. (i) Let S1 = {(a,∞) : a ∈ R}. Prove that S1 is a subbasis for a
topology on R. Find out the topology J1 generated by S1.
14

(ii) Let S2 = {(−∞, a) : a ∈ R}. Prove that S2 is a subbasis for a topology on R.
Find out the topology J2 generated by S2. 2
1.3 Interior Points, Limit Points, Boundary Points, Closure of a Set
Let A be a nonempty subset of a topological space (X,J ) and x ∈ A. Then x
is said to be an interior point of A if there exists an open set U such that x ∈ U
and U ⊆ A. Also the collection of all interior points of A denoted it by int(A) or A◦.
For a nonempty subset A of a topological space (X,J ), a point x ∈ X is said to be
a limit point or an accumulation point of A if for each open set U containing x,
U ∩ (AK{x}) 6= φ.
For A ⊆ X, the derived set of A denoted by A′ is defined as A′ = {x ∈ X :
x is a limit point of A}.
A point x ∈ X is said to be a boundary point of A if for each open set U
containing x, U ∩ A 6= φ and U ∩ Ac 6= φ.
For A ⊆ X, the boundary of A, denoted by bd(A), is defined as
bd(A) = {x ∈ X : for each open set U containing x, U ∩ A 6= φ and U ∩ Ac 6= φ}.
That is bd(A) is the collection of all boundary points of A.
For A ⊆ X, the closure of A denoted by A or cl(A), is defined as A = A∪A′.
Examples 1.3.1. (i) Let X = {1, 2, 3} and J = {φ,X, {1}, {2}, {1, 2}, {1, 3}, {2, 3}}
Is J a topology on X? Let A = {1, 3}, B = {2, 3}. Here A ∈ J , B ∈ J , but
A ∩B = {3} /∈ J . Hence J is not a topology on X.
(ii) Let X = {1,2,3} and J = {φ,X, {1}, {2}, {1, 2}} then J is a topology on X. Now
A = {2, 3} is a subset of X. 2 ∈ A and also there is an open set U = {2} such that
15

2 ∈ U and U ⊆ A. Hence 2 is an interior point of A. But 3 is not an interior point
of A. How to check 3 is an interior point of A or not?
Step 1: First check whether 3 ∈ A (if x is an interior point of A then it is essential
that x ∈ A). Yes here 3 ∈ {2, 3} = A.
Step 2: Now find out all the open sets containing 3. X is the only open set containing
3. But this open set is not contained in A. Hence 3 is not an interior point of A.
What will happen if the given set A is an open subset of a topological space X. Our
aim is to check whether an element x ∈ X is an interior point of A.
Step 1: It is essential that x ∈ A.
Step 2: Is it necessary to find out all the open sets containing x? Of course not
necessary. It is enough if we find at least an open set U such that x ∈ U and U ⊆ A.
In this case the given set A is an open set and hence there exists an open set U = A
such that x ∈ U and U = A ⊆ A. Therefore every element x of A is an interior point
of A. That is A ⊆ A◦. By definition A◦ ⊆ A. Hence A◦ = A. That is if A is an open
set then A◦ = A. What about the converse? Suppose for a subset A of X,A◦ = A.
Is A an open set? Yes, A is an open subset of X. Take x ∈ A. Then x ∈ A◦. Hence
by the definition of A◦ there exists at least one open set say Ux such that x ∈ Ux
and Ux ⊆ A. This implies that A = ∪x∈A
Ux. Now by the definition, J is closed under
arbitrary union. Hence for each x ∈ A,Ux ∈ J implies ∪x∈A
Ux ∈ J implies A ∈ J .
That is, A is an open set. Thus, we have proved:
Theorem 1.3.2. For a subset A of topological space (X, J ), A is open if and only
if A◦ = A.
Now let us prove that for any subset A of X, A◦ is an open set and if B is an
open set contained in A (B ⊆ A) then B ⊆ A◦.
16

Theorem 1.3.3. For any subset A of a topological space (X, J ), A◦ is the largest
open set contained in A.
Proof. If A = φ then A◦ = φ. For A 6= φ, let us prove that B = A◦ is an open
set. Due to theorem 1.3.2, it is enough to prove that (A◦)◦ = A◦◦ = A◦. If A◦ = φ
then A◦◦ = φ and we are through. Also by definition A◦◦ ⊆ A◦. Let x ∈ A◦. Then
by the definition, there exists an open set Ux such that x ∈ Ux ⊆ A. Note that for
each y ∈ Ux, y ∈ Ux ⊆ A. That is y ∈ A and there exists an open set Ux such that
y ∈ Ux and Ux ⊆ A. This implies that y ∈ A◦. That is y ∈ Ux implies y ∈ A◦ implies
Ux ⊆ A◦. We have the following:
• x ∈ A◦ and,
• there exists an open set Ux such that x ∈ Ux, Ux ⊆ A◦.
This implies that x ∈ A◦◦. That is x ∈ A◦ implies x ∈ A◦◦ implies A◦ ⊆ A◦◦. Also we
have A◦◦ ⊆ A◦ implies (A◦)◦ = A◦. From the theorem 1.3.2, A◦ is an open set. Also
by definition, A◦ ⊆ A.
To prove the second part assume that B is an open subset of X such that
B ⊆ A. Now we aim to prove B ⊆ A◦. Which is obvious since for each x ∈ B there
exists an open set B such that x ∈ B and B ⊆ A. Hence by definition B ⊆ A◦. �
Consider X = {1, 2, 3}, J = {φ, X, {1}, {1, 2}} and A = {1, 2}. What is
A′, the collection of all limit points of A. Is 1 ∈ A′? The answer is no. Since {1} is
an open set containing 1, but {1} ∩ AK{1} = {1} ∩ {2} = φ. Is 2 ∈ A′? Again the
answer is no. Since {2} is an open set containing 2 and {2}∩AK{2} = {2}∩{1} = φ.
Is 3 ∈ A′? First find out all the open sets containing 3.
17

Here the whole space X is the only open set containing 3 and X ∩ AK{3} =
{1, 2, 3} ∩ {1, 2} 6= φ. That is for each open set U containing 3, the condition namely
U∩AK{3} 6= φ is satisfied. Hence 3 is a limit point of A. That is 3 ∈ A′. Here A′ = {3}.
What is A, the closure of A? By definition A = A ∪ A′ = {1, 2} ∪ {3} = {1, 2, 3}.
Now let us prove that for any subset A of a topological space X,
• A is a closed set and A ⊆ A.
• Whenever B is a closed set such that A ⊆ B then A ⊆ B that is we aim to
prove:
Theorem 1.3.4. For a subset A of a topological space X, A is always a closed set
containing A and it is the smallest closed set containing A.
Proof. Let us prove that (A)c = XKA is an open set. Hence we will have to prove
that interior of (A)c is itself. Let x ∈ (A)c then x /∈ A. Hence there exists an open
set U containing x such that U ∩ A = φ⇒ U ⊆ Ac. This imply that x is an interior
point of Ac, but we have to prove that x is an interior point of (A)c. So it is enough
to prove that U ⊆ (A)c.
Suppose not. Then there exists y ∈ U such that y /∈ (A)c implies y ∈ (A). Also
U is an open set containing y. Hence U ∩A 6= φ. This is contradiction to U ∩A = φ.
We arrived at this contradiction by assuming that U is not a subset of (A)c. Hence
U ⊆ (A)c, where U is an open set containing x and x ∈ (A)c. Therefore every point
of (A)c is an interior point. This implies that (A)c is an open set and hence A is a
closed set.
Now let B be a closed set containing A then we will have to prove that A ⊆ B.
That is to prove A ∩Bc = φ.
18

Suppose not. Then there exists x ∈ A ∩ Bc, Bc is an open set containing x.
Now if x ∈ A = A ∪ A′ is such that x ∈ A then x ∈ B (given that A ⊆ B) and we
are through. On the other hand if x ∈ A′ and x /∈ A then by the definition of A′,
Bc ∩ AK{x} = Bc ∩ A 6= φ (note: x /∈ A ⇒ AK{x} = A) is a contradiction since
A ⊆ B implies A ∩Bc ⊆ B ∩Bc = φ. Hence A ∩Bc = φ. That is A ⊆ B. �
1.4 Hausdorff Topological Spaces
Definition 1.4.1. A topological space (X,J ) is said to be a Hausdorff topological
space (or Hausdorff space) if for x, y ∈ X, x 6= y, there exist U, V ∈ J such that
(i) x ∈ U, y ∈ V, (ii) U ∩ V = φ.
Note. In definition 1.4.1, in place of if it is also absolutely correct to use if and only
if. That is, definition 1.4.1 can also be read as:
A topological space (X,J ) is said to be a Hausdorff topological space (or Hausdorff
space) if and only if (iff) for x, y ∈ X, x 6= y, there exist U, V ∈ J such that
(i) x ∈ U, y ∈ V, (ii) U ∩ V = φ.
What is important to note here (that is while giving a definition) is one can
use interchangeably “if” and “if and only if”. ?
Example 1.4.2. If X = R, and Js is the standard topology on R, then (R,Js) is a
Hausdorff space.
Example 1.4.3. Every discrete topological space (X,J ) is a Hausdorff space.
Example 1.4.4. If X is a set containing at least two elements and J = {φ,X} then
(X,J ) is not a Hausdorff space.
Example 1.4.5. If X = R,B = {(a,∞) : a ∈ R} then B is a basis for a topology
JB on R. It is easy to see that (R,JB) is not a Hausdorff space.
19
Example 1.4.6. Bl = {[a, b) : a, b ∈ R, a < b}, Jl = JBlis known as the lower limit
topology on R and Js ⊆ Jl. Hence (R,Jl) is a Hausdorff space.
Note. Weaker topology is Hausdorff implies stronger is also Hausdorff. ?
Let X be an infinite set and Jf be the cofinite topology on X. Also let
x, y ∈ X, x 6= y. If U ∈ Jf and x ∈ U then U c is finite, because U c 6= X.
Also y ∈ V ∈ Jf implies V c is finite. If U ∩V = φ, then X = (U ∩V )c = U c∪V c and
hence X is a finite set. Which gives a contradiction. Therefore U ∩ V 6= φ. Hence Jf
is not a Hausdorff space.
Example 1.4.7. Let X = {a, b, c} and J = {φ,X, {a}, {b}, {a, b}}. Then (X,J ) is
not a Hausdorff space.
Example 1.4.8. B = {U1 × U2 × · · · × Un × R × R × · · · : each Ui is open in R,
i = 1, 2, . . . , n, n ∈ N} is a basis for a topology J (known as product topology) on
Rw, where Rw = {x = (xn)∞n=1 : xn ∈ R ∀ n}. Now X = Rw, x = (xn) ∈ X and
y = (yn) ∈ X such that x 6= y. Therefore there exists k ∈ N such that xk 6= yk.
Let ε = |xk−yk|2
> 0 and Uk = (xk − ε, xk + ε), Vk = (yk − ε, yk + ε). Let
U = R× R× · · · × R× Uk × R× R · · · and V = R× R× · · · × R× Vk × R× R · · · .
Clearly, x ∈ U , y ∈ V and U ∩ V = R × R × · · · × R × φ ×R × R × · · · = φ. Hence
X = Rw is a Hausdorff space.
Note.∞Πn=1
(−1n, 1n) is not an open set in the product topology on Rw. ?
Definition 1.4.9. A sequence {xn} in a topological space (X,J ) is said to converge
to a point x ∈ X if for each open set U containing x there exists n0 ∈ N such that
xn ∈ U, ∀ n ≥ n0. In symbol we write xn → x as n→∞.
Note that xn → x as n → ∞ if and only if for each open set U containing x there
exists n0 ∈ N such that xn ∈ U, ∀ n > n0.
20

Example 1.4.10. If X 6= φ, J ={φ,X}, and {xn} is a sequence in X. Then {xn}
converges to every element of X.
Example 1.4.11. If X be an infinite set, Jf = {A ⊆ X : Ac is finite or Ac = X},
then Jf is not Hausdorff. Let {xn} be a sequence in X and x ∈ X. Now U ∈ Jf
and x ∈ U ⇒ U c is finite. If U c = φ then U = X. Otherwise U c is nonempty and
finite and hence J = {n : xn ∈ U c} is a finite set. If J = φ let n0 = 1, otherwise let
n0 = max{n : n ∈ J}. Then xn ∈ U, ∀ n > n0. Therefore xn → x as n → ∞. So,
(xn) converges to every element of X.
Theorem 1.4.12. Let (X,J ) be a Hausdorff space and let A ⊆ X. Then an element
x ∈ A′ if and only if for each open set U containing x, U ∩ A is an infinite set.
Proof. Assume that x ∈ A′ and suppose for some open set U containing x,
U ∩ (AK{x}) is a nonempty finite set. Let U ∩ (AK{x}) = {x1, x2, . . . , xn}. For each
i, xi 6= x and (X,J ) is a Hausdorff space implies there exist open sets Ui and Vi
such that xi ∈ Ui, x ∈ Vi and Ui ∩ Vi = φ. Note that xi /∈ Vi for all i = 1, 2, . . . , n
and x ∈ V =n∩i=1
Vi, V is an open set. Also x ∈ U. Therefore x ∈ U ∩ V. But
(AK{x}) ∩ (U ∩ V ) = φ which is a contradiction. Hence U ∩ A is an infinite set.
Conversely, if for x ∈ X, U ∩ A is an infinite set for each open set containing
x then in particular U ∩ (AK{x}) 6= φ, for each open set containing x. Hence x is a
limit point of A. That is x ∈ A′. �
Exercise 1.4.13. Let (X,J ) be a topological space such that for each x in X,
{x} is closed in X. Then prove that an element x ∈ A′ if and only if for each open
set U containing x, U ∩ A is an infinite set. 2
Note. If X is a Hausdorff space, and if A is a finite subset of X, then A′ = φ. ?
21

Definition 1.4.14. A topological space (X,J ) is said to be metrizable if there
exists a metric d on X such that Jd = J .
Theorem 1.4.15. Let (X, d) be a Hausdorff topological space. Then {x} is closed
for each x ∈ X.
Proof. If {x}c = φ, then X = {x} is a closed set. Suppose {x}c 6= φ, this implies
that for each y ∈ {x}c, y 6= x. Now (X,J ) is a Hausdorff space implies there exist
open sets Ux, Vy in X such that x ∈ Ux, y ∈ Uy and Ux ∩Vy = φ. Therefore Vy ⊆ {x}c
implies y ∈ ({x}c)o. This implies that {x} is closed. �
Theorem 1.4.16. Let (X,J ) be a topological space, Y ⊆ X and let JY = {A ∩ Y :
A ∈ J } then JY is a topology on Y .
Proof. (i) φ ∈ JY . Now φ ∈ JX implies φ ∩ Y = φ ∈ JY .
(ii) Since X ∈ JX ⇒ X ∩ Y = Y ∈ JY .
Let Ai ∈ JY for i ∈ I. Now Ai ∈ JY implies there exists Bi ∈ J = JX such that
Ai = Bi ∩ Y. Now Bi ∈ J for each i ∈ I, J is a topology on X implies ∪i∈IBi ∈ J .
Hence ∪i∈IAi = ( ∪
i∈IBi) ∩ Y is open in JY .
(iii) Let A1, A2, . . . , An ∈ JY . Then there exists Bi ∈ JX such that Ai = Bi ∩ Y .
Thereforen∩i=1
Bi ∈ JX . Therefore A1∩A2∩· · ·∩An = (B1∩Y )∩(B2∩Y )∩· · ·∩(Bn∩Y )
= (n∩i=1
Bi) ∩ Y ∈ JY , and this implies that A1 ∩ A2 ∩ · · · ∩ An ∈ JY . From (i), (ii),
and (iii) JY is a topology on Y. �
Definition 1.4.17. Let (X,J ) be a topological space, and let JY = {A∩Y : A ∈ J }
then JY is a topology on Y . This topology JY is called the relative topology on Y
induced by J .
22

Note. Let A ⊆ Y ⊆ X. We use A to denote the closure of A in X, and AY to denote
the closure of A in Y . ?
Result 1.4.18. For A ⊆ Y, AY = A ∩ Y.
Proof. It is always true that AY ⊆ A. Now AY = closure of A in Y , AY ⊆ Y and
hence AY ⊆ A∩Y . Let x ∈ A∩Y. This implies that x ∈ A and x ∈ Y. Then for each
open set U containing x, U ∩A 6= φ. Hence (U ∩ Y )∩A = U ∩A 6= φ. Thus x ∈ AY .
Therefore A ∩ Y = AY . �
Theorem 1.4.19. Let (X,J ) be a topological space and A,B be subsets of X. Then
(i) A ∪B = A ∪ B, (ii) A ∩B ⊆ A ∩ B, (iii) A = A, (iv) (A∪B)◦ ⊇ A◦∪B◦,
(v) (A ∩B)◦ = A◦ ∩B◦, (vi) (A◦)◦ = A◦.
Proof. (i) An element x ∈ A if and only if for each open set U containing x such
that U ∩ A 6= φ. Let x ∈ A ∪B. This implies that for every neighbourhood U
containing x,
U ∩ (A ∪B) 6= φ⇒ (U ∩ A) ∪ (U ∩B) 6= φ. (1.4)
Suppose x /∈ A and x /∈ B. Then for some open sets U, V containing x such that
U∩A = φ and V ∩B = φ. Let U0 = U∩V . Then U0∩(A∪B) = (U0∩A)∪(U0∩B) = φ,
a contradiction to Eq. (1.4). Therefore x ∈ A or x ∈ B. This proves that
A ∪B ⊆ A ∪B. (1.5)
Now let x ∈ A ∪ B. This implies that x ∈ A or B or both. Hence for each
neighbourhood U of x, U∩A 6= φ or U∩B 6= φ. This implies that (U∩A)∪(U∩B) 6= φ
implies U ∩ (A ∪B) 6= φ. This shows that x ∈ A ∪B. Therefore
A ∪B ⊆ A ∪B. (1.6)
23

From Eqs.(1.5) and (1.6) A ∪B = A ∪B.
(ii) Let x ∈ A ∩B. Then for every open set U containing x, U ∩ (A∩B) 6= φ. Hence
U ∩ A 6= φ and U ∩B 6= φ. This implies x ∈ A and x ∈ B. Hence A ∩B ⊆ A ∩B.
(iii) A is the smallest closed set containing A implies A ⊆ A. Also A is a closed set
containing A. But A is the smallest closed set containing A. Hence A ⊆ A. So we
have A = A.
(iv) Now x ∈ A◦ ∪ B◦ ⇒ x ∈ A◦ or x ∈ B◦ or both. Without loss of generality
assume that x ∈ A◦. Then there exists U ∈ J such that x ∈ U ⊆ A. This implies
that x ∈ U ⊆ (A∪B). Hence x ∈ (A∪B)◦. That is x ∈ A◦∪B◦ implies x ∈ (A∪B)◦.
Hence (A ∪B)◦ ⊆ A◦ ∪B◦.
(v) Let x ∈ (A∩B)◦. Then there exists U ∈ J such that x ∈ U ⊆ A∩B. This implies
x ∈ A◦ and x ∈ B◦. Hence A◦ ∩B◦ ⊆ (A ∩B)◦.
Now let x ∈ A◦ ∩B◦. Then x ∈ A◦ and x ∈ B◦. Hence there exists U ∈ J such that
x ∈ U ⊆ A and V ∈ J such that x ∈ V ⊆ B, hence x ∈ U ∩ V ⊆ A ∩ B. Hence
x ∈ (A ∩B)◦. This implies (A ∩B)◦ = A◦ ∩B◦.
(vi) Now A◦◦ is the largest open set contained in A◦ implies A◦◦ ⊆ A◦. Also A◦ is an
open set contained in A◦. Hence A◦ ⊆ A◦◦. So we have proved that A◦ = A◦◦. �
Example 1.4.20. For A = Q, B = Qc, A ∪ B = R and (A ∪B)◦ = R, A◦ = φ,
B◦ = φ, R 6= φ. Hence (A ∪B)◦ 6= A◦ ∪B◦.
A = R, B = R, A ∩B = φ = φ. A ∩B = R. Hence A ∩B 6= A ∩B.
Definition 1.4.21. Let (X,J ) be a topological space. Then a set B ⊆ Y is open
in Y if and only if B = A ∩ Y, for some A ∈ J .
Example 1.4.22. The set [0, 1) is open in Y = [0,∞). Note that A = (−1, 1)∩[0,∞)
= [0, 1). Now Ac = Y KA = [1,∞) is open in (Y,JY ) if and only if for each x ∈ [1,∞)
24
there exists U ∈ JY such that x ∈ U ⊆ [1,∞). But 1 is not an interior point of
Ac. Hence Ac is not open and therefore A is not closed. Whereas [1,∞) is open in
[1,∞) ∪ Z.
Exercises 1.4.23. (i) Let X = R and Jf be the cofinite topology on R. Let Y = Q
what is Jf/Y=?
(ii) Prove that for each x ∈ R, the sequence (xn) = ( 1n)→ x in (R,Jf ). 2
Result 1.4.24. Let (X,J ) be a topological space and B is a basis for J then for
each Y ⊆ X, BY = {B ∩ Y : B ∈ B} is a basis for JY .
Proof. Let U ∈ JY and x ∈ U. U ∈ JY implies U = V ∩ Y for some V ∈ J . Now
x ∈ V, V ∈ J and B is a basis for J this implies that there exists B ∈ B such that
x ∈ B ⊆ U. Therefore B∩Y ⊆ V ∩Y = U. Now B∩Y ∈ BY such that x ∈ B∩Y ⊆ U.
Therefore BY is a basis for JY . �
Note. A ⊆ X and B is a basis for J , then x ∈ A◦ if and only if there exists B ∈ B
such that x ∈ B ⊆ A. ?
1.5 Continuous Functions
Definition 1.5.1. Let (X,J ) and (Y, J ′) be topological spaces and let
f : (X,J ) → (Y,J ′). Then f is said to be continuous at a point x ∈ X if for
each open set V containing f(x) there exists an open set U containing x such that
y ∈ U implies f(y) ∈ V . If f is continuous at each x ∈ X then we say that f is a
continuous function.
Theorem 1.5.2. Let (X,J ), (Y,J ′) be topological spaces. Then a function
f : X → Y is continuous if and only if for each open set V in Y, f−1(V ) is
open in X.
25
Proof. Let f be continuous and V be an open set in Y .
Claim: f−1(V ) = {x ∈ X : f(x) ∈ V } is open in X.
If f−1(V ) = φ then f−1(V ) is open in X. If f−1(V ) 6= φ, let x ∈ f−1(V ). Then
f(x) ∈ V. Now f is continuous at x, V is open containing f(x) implies there exists
an open set U such that x ∈ U and x′ ∈ U implies f(x′) ∈ V. That is
f(U) ⊆ V. This implies U ⊆ f−1(f(U)). Therefore x is an interior point of f−1(V ).
Hence f−1(V ) is open in X.
To prove the converse, assume that f−1(V ) is open in X whenever V is open
in Y. Now take x ∈ X and an open set V in Y such that f(x) ∈ V. Now V is open in
Y implies f−1(V ) is open in X. Also f(x) ∈ V implies x ∈ f−1(V ) = U. That is U is
an open set in X containing x such that y ∈ U implies f(y) ∈ f(f−1(V )) ⊆ V. Hence
f is continuous at each x ∈ X. �
Theorem 1.5.3. A function f : X → Y continuous if and only if f−1(A) is closed
in X whenever A is closed in Y .
Proof. Assume that f : X → Y is a continuous function. Take a closed set A in
Y. Since A is a closed set in Y, Ac is an open set in Y. Therefore f is a continuous
function implies f−1(Ac) = [f−1(A)]c is an open set in X. This proves that f−1(A) is
a closed set in X.
To prove the converse, assume that f−1(A) is closed in X whenever A is closed
in Y. Take an open set V in Y. Now V is an open set in Y implies f−1(V c) = [f−1(V )]c
is a closed set in X. Therefore f−1(V c) is a closed set in X, and hence f−1(V ) is an
open set in X. This gives that f is a continuous function. �
26

Example 1.5.4. Let X = Rw = {(x1, x2, . . . , xn . . .) : xn ∈ R, n ∈ N} and let
B = {U1 × U2 × · · · × Uk × R × R · · · : k ∈ N, each Ui is open in R, i = 1, 2, . . . , k}.
For A,B ∈ B, A ∩ B = (U1 ∩ V1) × · · · × (Uk ∩ Vk) × R × R × · · · ∈ B. Then B
is a basis for a topology on Rw. The topology J on Rw induced by B is called the
product topology on Rw. Bb = {U1 × U2 × · · · × Uk × Uk+1 × · · · each Uk is open in
R, ∀ k ∈ N} = {∞Πk=1
Uk : Uk is open in R ∀ k}. Then Bb is also a basis for a topology
on Rw. Let Jb be the topology on Rw induced by Bb. This topology on Rw is called
the box topology on Rw.
Example 1.5.5. Define f : R → (Rw,Jb) by f(t) = (t, t, t, . . . ) and U = (−1, 1) ×
(−12, 12) × (−1
3, 13) × · · · =
∞Πn=1
(−1n, 1n). Then U ∈ Jb, f−1(U) = {t ∈ R : f(t) ∈ U}
= {t ∈ R : (t, t . . .) ∈∞Πn=1
(−1n, 1n) = U} = {t ∈ R : |t| < 1
n, ∀n ∈ N} = {0}, and
{0} is not an open set in R. Hence f is not a continuous function. But the same
f : R→ (Rw,J ) is a continuous function, when we consider the product topology J
on Rw.
Theorem 1.5.6. A function f : X → Y is continuous if and only if for every subset
A of X, f(A) ⊆ f(A) (where it is understood that X, Y are topological spaces).
Proof. Now assume that f : X → Y is continuous. To prove for A ⊆ X, f(A) ⊆
f(A). Now f(A) is a closed set in Y and f : X → Y is a continuous function
implies f−1(f(A)) is a closed set in X. Also A ⊆ f−1(f(A)) ⊆ f−1(f(A)). That
is f−1(f(A)) is a closed set containing A. Hence A ⊆ f−1(f(A)). This gives that
f(A) ⊆ f(f−1(f(A))) ⊆ f(A).
Conversely assume that for A ⊆ X, f(A) ⊆ f(A). Let F be a closed set in
Y and A = f−1(F ). Now f(A) ⊆ f(A) implies f(f−1(F )) ⊆ f(f−1(F )) ⊆ F = F.
Hence f−1(f(f−1(F ))) ⊆ f−1(F ). This gives that f−1(F ) ⊆ f−1(F ). This proves that
27

f−1(F ) is a closed set in X whenever F is a closed set in Y. Therefore f : X → Y is
a continuous function. �
Remark 1.5.7. Intuitively what do we mean by a continuous function? In the above
theorem, for any subset A of X, if a point x is closer to A then the image f(x) is
closer to f(A). Here x ∈ A means x is closer to A and hence f(x) ∈ f(A). Now
we want that f(x) is closer to f(A). That is f(x) ∈ f(A). So a function f : X → Y
is continuous if and only if for every subset A of X, x is closer to A implies f(x) is
closer to f(A). �
Definition 1.5.8. Let X, Y be topological spaces. Then a function f : X → Y is
said to be a homeomorphism if and only if
(i) f is bijective
(ii) f : X → Y , f−1 : Y → X are continuous.
Example 1.5.9. (i) f : [0, 1] → [a, b] defined by f(t) = (1 − t)a + tb is a
homeomorphism.
(ii) f : (0, 1)→ (1,∞) defined by f(t) = 1t
is a homeomorphism.
(iii) f : (0, 1)→ (0,∞) defined by f(t) = t1−t is a homeomorphism.
(iv) Let X = (R,Js), Y = (R,Jf ). Let F 6= φ be a closed in Y. Then F is a finite
set or F = R. In any case f−1(F ) = F is closed in X. Hence f is continuous but the
identity map f−1 : Y → X is not continuous.
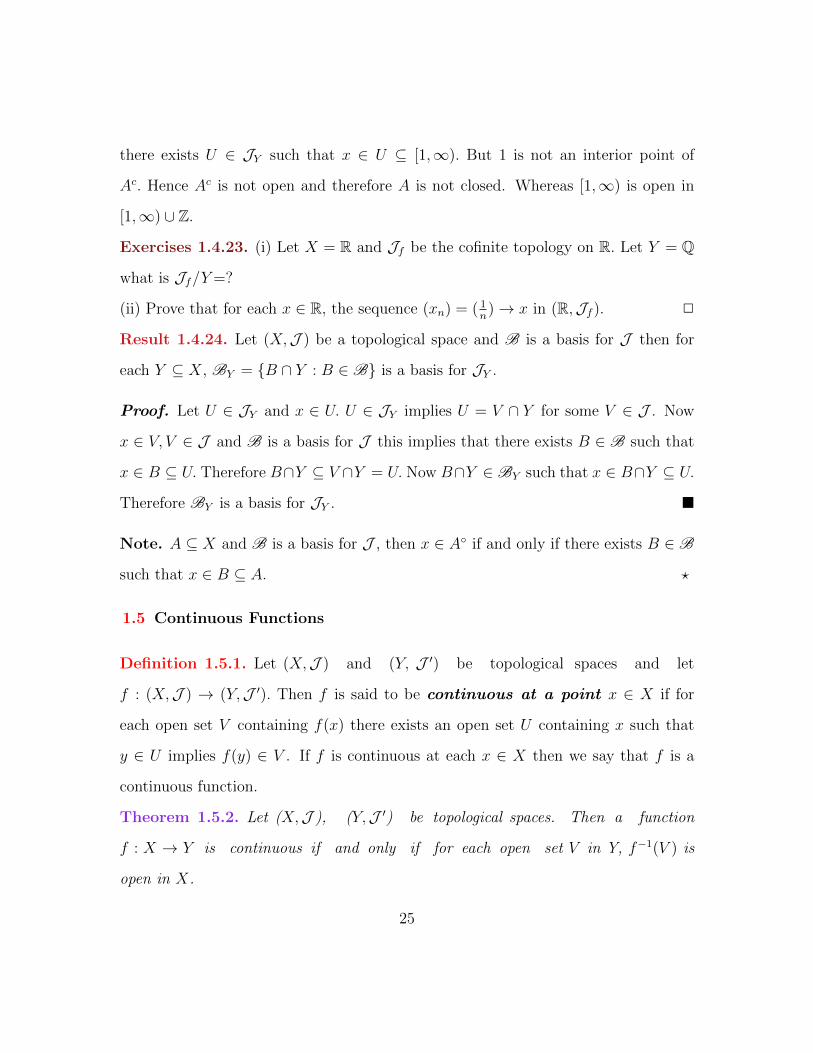
Example 1.5.10. Let X = [(−1,−1), (1,−1)] be the line segment joining the points
(−1,−1) and (1,−1) in R2 and Y = {(x, y) ∈ R2 : −1 ≤ x ≤ 1, y ≥ 0, x2 + y2 = 1}.
Then X, Y are subspaces of the Euclidean space R2.
Define f : X → Y as f((x, y)) = f(x,−1) = (x,√
1− x2) then f is a homeomorphism.
That is f is bijective and U is open in X if and only if f(U) is open in Y.
28
x + y 122
( 1, 1) (1, 1) ( x, 1)
x-axis
Figure 1.4
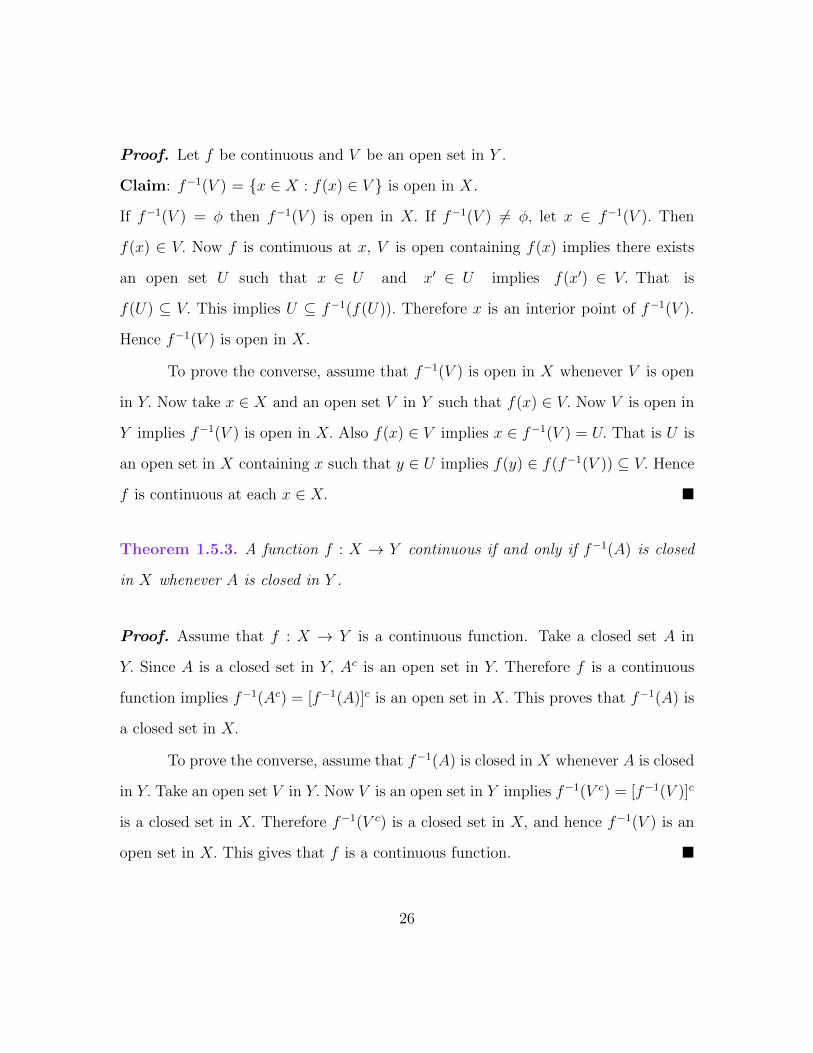
Exercise 1.5.11. Let A and B be two distinct points in R2 and γ be a curve joining
A and B as shown below: That is γ : [0, 1] → R2 is a one-one continuous function.
0 1t
( )tγ
A
B
Figure 1.5
Then prove that γ : [0, 1]→ {γ(t) : t ∈ [0, 1]} is a homeomorphism. That is [0,1] and
{γ(t) : t ∈ [0, 1]} are equivalent topological spaces. That is, there is a homeomorphism
between these two topological spaces. 2
Exercise 1.5.12. Prove that f : X → Y is a homeomorphism if and only if
(i) f is bijective
(ii) f(A) = f(A), for A ⊆ X. 2
29

Exercises
1. Prove that the half-open interval [0, 1) is neither open nor closed in R, but is
both a union of closed sets and an intersection of open sets.
2. Prove that the set A = {0} ∪ { 1n
: n ∈ N} is closed in R.
3. Find the collection of all interior points, limit points and boundary points of
(i) { 1n
: n ∈ N} (ii) { nm
: m ∈ N, 1 ≤ n ≤ m} (iii) { nm
: n,m ∈ N}
(iv) {m + 1m
: m ∈ N} (v) {1 + nm
: n,m ∈ N} (vi) {m + nm
: n,m ∈ N}
(vii) {(x, y) : 0 ≤ x ≤ 2, 1 < y < 2} (viii) {(x, y) : xy = 1, x > 0, x ∈ Q}.
4. Prove that A◦ = ∪U∈S
U , where S = {U ⊆ A : U is open }.
5. Prove that A = ∩U∈S
U , where S = {U : A ⊆ U and U is closed }.
6. Let X = {a, b, c, d} be four points. Show that the collection J := {X, φ,
{a}, {c}, {a, b}, {a, c}, {c, d}, {a, c, d}, {a, b, c}} defines a topology on X.
Find the collection of all limit points, closures, interiors, and boundaries of all
subsets of X.
7. Prove that for any set A in a topological space bd(A) = bd(A) and bd(intA) ⊆
bd(A). Give an example when all these three sets are different.
8. Find examples of sets (6= φ, X) in a topological space that are both open and
closed, neither open, nor closed.
9. Let X be an uncountable set with co-countable topology. Which of the following
sets are closed, open. Justify your answer.
(i) A is a finite set (ii) A is a countable set (iii) A is an uncountable set
(iv) A is a proper subset of X such that both A and Ac are uncountable.
10. Let X be the set of all real numbers with lower limit topology. Let α, β ∈ X,
α < β. Find the interior and closure of (i) [α, β] (ii) (α, β] (iii) [α, β).
30

11. Let X be the set of all real numbers with K- topology. That is the topology
generated by the basis B := {(a, b), (a, b)KK : a, b ∈ R, a < b}, where
K = { 1n
: n ∈ N}. Find the closure and interior of the set E = { 1n
: n ∈ N}.12. Let X be the set of all natural numbers with the usual topology (i.e., N is
considered as a subset of R). Find all the open and closed sets in X.
13. Let A, B are nonempty subsets of a topological space X. Assume that
bd(A) ∩ bd(B) = φ. Prove that int(A ∪B) = int(A) ∪ int(B).
14. Let J1 and J2 be two topologies on X. Prove that identity map
id : (X,J1) → (X,J2) is continuous if and only if J1 is finer then J2 (that is
J2 ⊆ J1).
15. Give an example of a continuous map f from a topological space X to another
topological space Y , such that f(A) is not open (respectively not closed) for a
open (closed) subset A in X.
16. Let X be a topological space. Prove that a map f : X → R is continuous if
and only if for every a ∈ R the sets f−1(−∞, a) := {x ∈ R : f(x) < a} and
f−1(a,∞) := {x ∈ R : f(x) > a} are open.
17. Let (X,JX), (Y,JY ) and (Z,JZ) be topological spaces. If functions f : X → Y
and g : Y → Z are continuous, then show that the composition g ◦ f : X → Z
is continuous. Is the converse true? Justify your answer.
18. Given a function f : X → Y and a basis B for Y , then f is continuous if and
only if f−1(U) is open in X for each U ∈ B.
19. Given a function f : X → Y and a subbasis S which generates the topology on
Y , then f is continuous if and only if f−1(U) is open for X for each U ∈ S.
20. Suppose f : X → Y is continuous, A ⊂ X. Show that f |A is continuous, where
g = f |A: A→ Y is defined as g(x) = f(x) for all x ∈ A.
31

21. Give an example of a function f : R→ R, such that
(a) f is continuous at exactly 10 points.
(b) f is discontinuous only at 2n number of points, n ∈ N.
22. Say true or false and justify your answer. Let J1, J2 be topologies on R.
Suppose f : (R,J1) → (R,J2) is defined as f(x) = |x|.
(a) if J1 and J2 are usual and lower limit topologies respectively, then f is
continuous,
(b) if J1 and J2 are lower limit and usual topologies respectively, then f is
continuous,
(c) if J1 and J2 both are lower limit topologies, then f is continuous.
23. Say true or false and justify your answer. Let J1,J2 be two topologies on R.
Suppose f :(R,J1) → (R,J2) is defined as f(x) :=
x− 1 if x < 0,
x+ 1 if x ≥ 0
(a) if J1 and J2 are usual and lower limit topologies respectively, then f is
continuous,
(b) if J1 and J2 are lower limit and usual topologies respectively, then f is
continuous,
(c) if J1 and J2 both are lower limit topologies, then f is continuous.
24. Let (X,JX) and (Y,JY ) be topological spaces and let A, B be nonempty subsets
of X with A∪B = X. Suppose f : X → Y is a function. Then prove or disprove
(a) if f |A and f |B are continuous, then f is continuous,
(b) if f |A and f |B are continuous and bd(A)∩bd(B) = ∅, then f is continuous.
25. Let f, g : (R,Js) → (R,Js), (where Js is the usual (standard) topology on R)
be continuous. Prove or disprove:
32

(a) the set {x ∈ R : f(x) ≤ g(x)} is closed,
(b) the function h : R → R defined as h(x) := min{f(x), g(x)} for x ∈ R is
continuous,
(c) the function h : R → R, defined as h(x) := max{f(x), g(x)} for x ∈ R is
continuous.
33
34

Chapter 2
Product and Quotient Spaces
Let (Xi,Ji), i = 1, 2, . . . , n be given topological spaces. Also note that it is possible
that (Xi,Ji) = (Xj,Jj) even when i 6= j. What do we mean by the cartesian product
X = X1 ×X2 × · · · × Xn? We define the cartesian product as X =n
Πj=1
Xj = X1×
X2 × · · · ×Xn = {f : J → ∪j∈J
Xj : f(i) = xi ∈ Xi ∀ i ∈ J}, where J = {1, 2, . . . , n}.
Here we identify an f ∈ X with (x1, x2, . . . , xn), where xi = f(i) for all i = 1, 2, . . . , n.
What is the advantage of defining the cartesian product in this way? Let J
be a nonempty set (finite or infinite) and for each α ∈ J we have a topological space
(Xα,Jα). Now we define the cartesian product Πα∈J
Xα = X as X = {f : J → ∪α∈J
Xα :
f(α) = xα ∈ Xα, ∀ α ∈ J}.
2.1 Product Space
Definition 2.1.1. For each α ∈ J , define a function pα : X → Xα, known as α-th
projection or coordinate function, as pα(f) = f(α) = xα.
Our aim is to define a topology J on Πα∈J
Xα which will have the following
properties:
• Each projection function pα : (X,J ) → (Xα,Jα) is continuous.
• Whenever J ′ is a topology on X such that each pα : (X,J ′) → (Xα,Jα) is
continuous then J ⊆ J ′.
35

That is J is the smallest (or weakest topology) on X that makes each pα continuous.
For α ∈ J, let Sα = {p−1α (Uα) : Uα ∈ Jα}. Then we require that p−1α (Uα) is open
in our proposed topological space (X,J ). Hence we require that ∪α∈JSα ⊆ J .
Note that p−1α (Uα) = {f ∈ X : pα(f) = f(α) = xα ∈ Xα}. Hence if we fix an
α ∈ J , then p−1α (Uα) = Πβ∈J
Aβ, where Aα = Uα and Aβ = Xβ when β 6= α. If
α1, α2, . . . , αn, n ∈ N and Uαi∈ Jαi
, i = 1, 2, . . . , n, then p−1αi(Uαi
) ∈ J . Also J
is closed under finite intersections means thatn∩i=1
p−1αi(Uαi
) = Πα∈J
Aα ∈ J , where
Aαi= Uαi
, i = 1, 2, . . . , n and Aα = Xα when α 6= α1, α2, . . . , αn. Now it is easy
to see that B = { Πα∈J
Uα : Uα ∈ Jα for all α ∈ J and Uα = Xα, except for finitely
many α 6= α1, α2, . . . , αn ∈ J} is a basis for a topology on X. The topology J induced
by B is called the product topology on X = Πα∈J
Xα and the topological space (X,J )
is called the product topological space (also known as product space) induced by
the topological spaces (Xα,Jα), α ∈ J.
Remark 2.1.2. What will happen when J = {1, 2, . . . , n} for some natural number
n? When n = 1, X = {f : {1} → X1 : f(1) = x1 ∈ X1} = X1 and X =
{f : {1, 2, . . . , n} →n∪i=1
Xi : f(i) = xi ∈ Xi}. That is f = (f(1), f(2), . . . , f(n)) =
(x1, x2, . . . , xn) ∈ X =n
Πi=1
Xi. Hence X = {(x1, x2, . . . , xn) : xi ∈ Xi, i = 1, 2, . . . , n}
= X1 ×X2 × · · · ×Xn.
In this case, that is when J = {1, 2, . . . , n} is a finite index set containing n
elements, B = {n
Πi=1
Ui: each Ui is open in Xi, i = 1, 2, . . . , n} is a basis for the product
topology J on X =n
Πi=1
Xi. �
Now let us prove the following theorem:
36

Theorem 2.1.3. Let J 6= φ be an index set and (Xα,Jα), α ∈ J be a collection of
Hausdorff topological spaces. Then the product space
(Πα∈J
Xα,J)
is also a Hausdorff
topological space.
Proof. Our aim is to prove that the product topological space ( Πα∈J
Xα,J ) is a
Hausdorff topological space. So take two distinct elements f, g in Πα∈J
Xα. Now
f, g ∈ Πα∈J
Xα implies f : J → ∪α∈J
Xα and g : J → ∪α∈J
Xα such that
f(α) = xα ∈ Xα, g(α) = yα ∈ Xα, for each α ∈ J . Also f 6= g ⇒ there exists α0 ∈ J
such that xα0 = f(α0) 6= g(α0) = yα0 . We have xα0 , yα0 ∈ Xα0 and xα0 6= yα0 . Hence
(Xα0 ,Jα0) is a Hausdorff topological space implies that there exist Uα0 , Vα0 ∈ Jα0
satisfying:
(i) xα0 ∈ Uα0 , yα0 ∈ Vα0 and (ii) Uα0 ∩ Vα0 = φ.
Now use (i) and (ii) to construct basic open sets U , V in the product space
satisfying f ∈ U , g ∈ V, and U ∩ V = φ. So, let Uα = Xα, Vα = Xα, whenever
α 6= α0. We already have Uα0 , Vα0 which are open sets in (Xα0 ,Jα0). Define U, V
as U = Πα∈J
Uα, V = Πα∈J
Vα, where U , V are defined as above. We have f(α) ∈ Xα,
g(α) ∈ Xα for all α ∈ J and hence f ∈ U , g ∈ V (why?). Also U ∩ V = ( Πα∈J
Uα) ∩
( Πα∈J
Vα) = Πα∈J
Uα ∩Vα = φ, since Uα0 ∩Vα0 = φ. That is for f, g ∈ Πα∈J
Xα with f 6= g
there exist basic open sets U, V in the product space such that f ∈ U, g ∈ V, and
U ∩V = φ. This implies that the product space ( Πα∈J
Xα,J ) is a Hausdorff space. �
Note. Let (X,J ) be a topological space and B be a basis for (X,J ) (or say B is
a basis for J ). Then for a subset A of X, x ∈ A if and only if for each U ∈ B with
x ∈ U, U ∩ A 6= φ. That is x ∈ A if and only if for each basic open set U
containing x, U ∩ A 6= φ. ?
37

Theorem 2.1.4. Let (Xα,Jα), α ∈ J be a collection of topological spaces and
Aα ⊆ Xα for each α ∈ J then Πα∈J
Aα = Πα∈J
Aα, with respect to the product space
( Πα∈J
Xα,J ).
Proof. First let us prove Πα∈J
Aα ⊆ Πα∈J
Aα. Let f ∈ Πα∈J
Aα. Then f : J → ∪α∈J
Aα
such that f(α) = xα ∈ Aα for all α ∈ J . We aim to prove that f is in the closure
of Πα∈J
Aα in the product topological space Πα∈J
Xα. So take a basic open set B in the
product space(
Πα∈J
Xα,J)
containing f, say B = Πα∈J
Uα. It is given that f ∈ Πα∈J
Aα.
Hence f(α) = xα ∈ Aα for each α ∈ J . Now f ∈ B = Πα∈J
Uα implies f(α) ∈ Uα
for all α ∈ J . That is Uα is an open set containing xα and xα ∈ Aα. This implies
that Uα ∩ Aα 6= φ. Let zα ∈ Uα ∩ Aα for all α ∈ J . Define g : J → ∪α∈J
Aα as
g(α) = zα ∈ Aα then g ∈ B ∩ Πα∈J
Aα. This implies that for each basic open set B
containing f,B ∩ Πα∈J
Aα 6= φ. This implies f ∈ Πα∈J
Aα. That is f ∈ Πα∈J
Aα implies
f ∈ Πα∈J
Aα and this proves the assertion
Πα∈J
Aα ⊆ Πα∈J
Aα. (2.1)
Now let us prove the converse part namely Πα∈J
Aα ⊆ Πα∈J
Aα. So let f ∈ Πα∈J
Aα ⊆
Πα∈J
Xα = X. Our aim is to prove: f ∈ Πα∈J
Aα. But f ∈ Πα∈J
Xα if and only if f(α) ∈ Xα
for each α ∈ J and f ∈ Πα∈J
Aα if and only if f(α) ∈ Aα for each α ∈ J . For a fixed
α0 ∈ J take an open set Uα0 containing f(α0) = xα0 . We will have to use the fact that
f ∈ Πα∈J
Aα. To use this fact we will have to construct a basic open set containing f .
Keeping this in mind, we define B = Πα∈J
Uα, where Uα = Xα, when α 6= α0 and Uα0
is as given above. Now this B is a basic open set containing f and hence f ∈ Πα∈J
Aα
implies B ∩ Πα∈J
Aα 6= φ. That is(
Πα∈J
Uα)∩(
Πα∈J
Aα)
= Πα∈J
Uα∩Aα 6= φ. This implies
that each Uα ∩ Aα 6= φ. In particular Uα0 ∩ Aα0 6= φ implies xα0 ∈ Aα0 . Note that
38

though our α0 ∈ J is a fixed element, there is no restriction on α0 ∈ J and the proof
will go through for any α ∈ J . This gives that f(α) = xα ∈ Aα for all α ∈ J and this
implies that f ∈ Πα∈J
Aα. Hence f ∈ Πα∈J
Aα ⇒ f ∈ Πα∈J
Aα. This implies
Πα∈J
Aα ⊆ Πα∈J
Aα. (2.2)
Now combining Eqs. (2.1) and (2.2) we have Πα∈J
Aα = Πα∈J
Aα. �
2.2 The Box Topology
Definition 2.2.1. Let (Xα,Jα), α ∈ J, be a collection of topological spaces and
Bb = { Πα∈J
Uα : Uα ∈ Jα for α ∈ J}. Then Bb is a basis for a topology on X = Πα∈J
Xα
and Jb, the topology induced by Bb, is called the box topology on X.
Remark 2.2.2. From the definitions of product and box topologies, it is clear that
B ⊆ Bb, where the product topology J on X is induced by B (refer the definition of
product topology) and the box topology Jb is induced by Bb. Now B ⊆ Bb implies
JB = J ⊆ Jb. That is the product topology on Πα∈J
Xα = X is weaker than the box
topology Jb on X. �
It is to be noted that if a subset A of X is open with respect to the product
topology on X then it is also open with respect to the box topology on X. Note that
the set A =∞Πi=1
(− 1
n, 1n
)is an open set in Rw = R×R× · · · with respect to the box
topology but not open with respect to the product topology on Rw. Also we have
proved that if (Xα,Jα), α ∈ J , is a collection of Hausdorff topological spaces then the
product space(
Πα∈J
Xα,Jα)
is also a Hausdorff space. Since J ⊆ Jb it is clear that
if(Xα,Jα
), α ∈ J is a collection of Hausdorff topological spaces then
(Πα∈J
Xα,Jb)
is
also a Hausdorff space.
Note that if J is a nonempty finite index set then J = Jb on Πα∈J
Xα.
39

Theorem 2.2.3. Let (Xα,Jα), α ∈ J, be a collection of topological spaces and for
each α ∈ J , let Aα ⊆ Xα. Then Πα∈J
Aα = Πα∈J
Aα, where Aα denotes the closure of
Aα in (Xα,Jα) and Πα∈J
Aα denotes the closure of Πα∈J
Aα in ( Πα∈J
Xα,Jb).
Proof. Proof of this theorem is similar to that of theorem 2.1.4. �
Theorem 2.2.4. Let (X,J ), (Y,J ′), (Z,J ′′) be topological spaces
and f : (X,J ) → (Y,J ′), g : (Y,J ′) → (Z,J ′′) be continuous functions then the
composite function g ◦ f : (X,J ) → (Z,J ′′) defined as (g ◦ f)(x) = g(f(x)) is also a
continuous function.
Proof. We aim to prove g ◦ f : (X,J ) → (Z,J ′′) is a continuous function. So start
with an open set W in (Z,J ′′). Now W is an open set in Z (means W ∈ J ′′) and
g : (Y,J ′) → (Z,J ′′) is a continuous function implies g−1(W ) is an open set Y .
Now f : (X,J ) → (Y,J ′) is also a continuous function. Hence f−1(g−1(W )) is an
open set in X. We define for A ⊆ Y , f−1(A) = {x ∈ X : f(x) ∈ A}. That is
x ∈ f−1(A) if and only if f(x) ∈ A. Hence f−1(g−1(W )) = {x ∈ X : f(x) ∈ g−1(W )}
= {x ∈ X : g(f(x)) ∈ W} = (g ◦ f)−1(W ). That is we have proved: W is an open set
in (Z,J ′′) implies (g ◦ f)−1(W ) is an open in (X,J ) implies g ◦ f : (X,J )→ (Z,J ′′)
is a continuous function. �
Definition 2.2.5. A sequence {xn} is a topological space (X,J ) is said to converge
an element x in X if for each open set U containing x, there exists a natural number
n0 (that is n0 ∈ N) such that xn ∈ U for all n ≥ n0.
The product topology R × R × R × · · · =∞Πn=1
Rn = Rw, where Rn = R,
n = 1, 2, 3 . . . is metrizable. That is, we will have to define a metric say d1 of Rw
such that Jd1 = J , the product topology on Rw. For x = (xn)∞n=1 = (xn) ∈ Rw,
40
y = (yn) ∈ Rw, let d1(x, y) = supn≥1
{d(xn,yn)
n
}, where d(xn, yn) = min{1, |xn − yn|}.
(Exercise. Let (X, d) be a metric space and d(x, y) = min{1, d(x, y)} for all x, y ∈ X.
Prove that (i) d is a metric on X, (ii) Jd = Jd.)
It is easy to prove that d1 is a metric on Rw. First let us prove that Jd1 ⊆ J . So,
let U ∈ Jd1 . We aim to prove that each point of U is an interior point of U with respect
to the product topology J on Rw. Take x ∈ U . Now x ∈ U , U is an open set in the
metric space (Rw, d1) implies there exists r > 0 such that Bd1(x, r) ⊆ U . Now choose
n0 ∈ N such that 1n0< r and B = (x1− ε, x1 + ε)×· · ·× (xn0− ε, xn0 + ε)×R×R×· · ·
then B is a basic open set in (Rw,J ) containing x = (xn). Now we leave it as an
exercise to prove that B ⊆ Bd1(x, ε). Hence for each x ∈ U , there exists a basic open
set B in (Rw,J ) such that x ∈ B ⊆ U. This proves that U ∈ J that is
Jd1 ⊆ J . (2.3)
Now let us prove that J ⊆ Jd1 . To prove this statement it is enough to prove
that every basic open subset V of (Rw,J ) is in Jd1 . Now V is a basic open set in the
product topology implies there exists k ∈ N such that V = V1× V2 × · · · × Vk ×R ×
R×· · · . Let x = (xn)∞n=1 ∈ V . Hence there exist ε1, ε2 . . . εk, 0 < εi < 1 for i =
1, 2, . . . , k such that (xi−εi, xi+εi) ⊆ Vi. Now let ε = min{ εii
: i = 1, 2, . . . , k}. (note:
we have Ui = R for all i > k and hence it is enough to consider ε1, . . . , εk) and we claim
that Bd1(x, ε) ⊆ V . So, let y ∈ Bd1(x, ε) then d1(x, y) < ε implies supn≥1
{d(xn,yn)
n
}< ε
implies d(xn,yn)n
< ε for all n = 1, 2, . . . , k implies 1n
min{1, |xn − yn|} < ε for all
n = 1, 2, . . . , k implies min{1, |xn − yn| < nε < εn < 1 for all n = 1, 2, . . . , k implies
|xn − yn| < εn for all n = 1, 2, . . . , k implies y = (yn) ∈ V1 × · · · × Vk × R× · · · = V .
This proves that Bd1(x, ε) ⊆ V . That is for each x ∈ V there exists ε > 0 such that
41

Bd1(x, ε). Hence every point of V is an interior point of V with respect to (Rw,Jd1).
Hence
V ∈ Jd1 . (2.4)
Now if U ∈ J then there exists k ∈ N and B1, B2, . . . , Bk ∈ B (B = {∞Πn=1
Un: each
Un is open in R and Un = R for except finitely many n′s} is our standard basis for
the product topology J on Rw) such that U = B1 ∩ · · · ∩ Bk. We have proved that
each basic open set B of J belongs to Jd1 (i.e B ∈ Jd1) (refer Eq. (2.4)). Now
B1, B2, . . . , Bk ∈ Jd1 and Jd1 is a topology implies B1 ∩ B2 ∩ · · · ∩ Bk ∈ Jd1 . This
proves that U ∈ Jd1 That is
U ∈ J ⇒ U ∈ Jd1 ⇒ J ⊆ Jd1 . (2.5)
From Eqs. (2.3) and (2.5) we see that J = Jd1 . Hence the product space
Rw = R × R × · · · with product topology J is metrizable. It is interesting to note
that if we consider the box topology say Jb on Rw, then (Rw,Jb) is not a metrizable
topological space.
How to prove that a given topological space (X,J ) is not metrizable. If (X,J )
is metrizable then we will have to find a metric (finding such a metric is not at all an
easy task and this statement will become meaningful if we have patience to wait and
see the proof of the Urysohn metrization theorem) say d on X such that Jd = J . We
have just proved that (Rw,J ) (with product topology) is metrizable and in this case
we could define a metric d on Rw such that Jd = J .
To prove that a topological space is not metrizable space is comparatively
easier. For example, if the given topological space (X,J ) is not a Hausdorff
topological space then it is clear that there cannot exist any metric d on X such
42

that Jd = J . We know that if d is a metric on X, then (X,Jd) is a Hausdorff
space. So, what we need here is to find a property a metric space has whereas the
given topological space does not have that particular property. Now let us come back
and prove that (Rw,Jb) is not metrizable. Suppose there exists a metric say d on
Rw such that Jd = Jb. Then we know that for A ⊆ X, x ∈ A if and only if there
exists a sequence (xn) in A such that (xn) → x as n → ∞ (to prove this statement,
observe the following: For x ∈ A,B(x, 1n)∩A 6= φ, for each n ∈ N and hence we have
{B(x, 1n)∩A}∞n=1 = {An}∞n=1 = {An}n∈N a collection of nonempty sets. Now by axiom
of choice there exists a choice function say f : N→∞∪n=1
An such that xn = f(n) ∈ An.
So using axiom of choice we have got a sequence (xn) in A and now it is easy to see
that xn → x as n→∞).
Note that normally we just say that B(x, 1n) ∩ A 6= φ implies there exists
xn ∈ B(x, 1n)∩A = An. In such case it is to be understood that in fact we use axiom of
choice to define such a sequence (xn). Now let us prove that if A = {(x1, x2, x3 . . . , ) :
xk > 0 for all k ∈ N}. Then 0 = (0,0,0,. . . ,) ∈ A, but there does not exist any
sequence (x(n)) in A such that x(n) → (0, 0, . . .) in (Rw,Jb).
Step 1: Prove that 0 ∈ A.
So take an open set say U containing 0 then there exists a basic open set B =∞Πn=1
Bn =
B1×B2×· · · such that (0, 0, . . . , ) ∈ B1×B2×· · · ⊆ U . (Here each Bk is an open set
in R containing 0 ∈ R) 0 ∈ Bk, k = 1, 2, 3 . . . implies there exist ak, bk ∈ R, ak < bk
such that 0 ∈ (ak, bk) ⊆ Bk, bk > 0 and hence bk2> 0 implies b = ( bk
2)∞k=1 ∈ A ∩ B
implies A ∩ B 6= φ implies A ∩ U 6= φ implies 0 = (0, 0, . . . , ) ∈ A. Now we claim
that there cannot exist any sequence x(n) in A such that x(n) → (0, 0, 0 . . .).
Let x(n) = (a1n, a2n, . . . , ) ∈ A. Then each ain > 0 for all i = 1, 2, . . .. In particular,
43

akk > 0 for all k = 1, 2, . . .. Let U = ( (−a11)2
, a112
) × ( (−a22)2
, a222
) × · · · then U is an
open set in (Rw,Jb) containing 0.
What will happen if U ∩A 6= φ. Note that for each n, ann /∈ ( (−ann)2
, ann
2) and
hence x(n) = (a1n, a2n, . . . , ) /∈ U . If x(n) → (0, 0, . . .) then there exists n0 ∈ N such
that x(n) ∈ U for all n ≥ n0. But here x(n) /∈ U for every n. Hence x(n) does not
converge to (0,0,0, . . .). So (0, 0, . . .) ∈ A but there cannot exist any sequence in A
which converges to (0, 0, . . .) with respect to Jb. This proves that (Rw,Jb) is not a
metrizable topological space.
2.3 Quotient (Identification) Spaces
We start with a given topological space (X, J ). By identifying some of the
points of X we can produce a new topology on a new set say X∗. For example if
we consider the closed unit ball in R2, then our given topological space is (X,J ),
where X is the closed unit ball in R2. Here we consider (X,J ) as a subspace of the
Euclidean space R2. Now we get a new set X∗ = {(x1, x2) ∈ R2 : x21 + x22 < 1}∪ {S ′},
where S ′ is the unit circle (boundary) of the closed disc X. By defining a suitable
topology J ∗ on X∗ we can show that (X∗,J ∗) is homeomorphic to the 2-sphere
S2 = {(x1, x2, x3) ∈ R3 : x21 + x22 + x23 = 1}. It is to be noted that here we are
considering S2 as a subspace of R3 (also note that if no topology on Rn, n ≥ 1 is
mentioned then it is understood that we have the usual topology on Rn).
Now let us see how to construct the quotient topology. Let (X,J ) be a
topological space and X∗ be a nonempty set. Let p : X → X∗ be a surjective map.
44
Then J ∗ = {A ⊆ Y : p−1(A) is open in (X,J )} is a topology on X∗. This topology
J ∗ on X∗ is called the quotient topology on X∗ induced by p.
It is easy to prove that J ∗ is a topology on X and we leave it as an exercise.
Definition 2.3.1. Let (X,J ) be a topological space and X∗ be a partition of X into
disjoint subsets whose union is X. Let p : X → X∗ be the natural map satisfying the
condition namely x ∈ p(x), for each x ∈ X. Suppose for a given x ∈ X there exist
A,B ∈ X∗ such that x ∈ A and x ∈ B. Then x ∈ A∩B. This implies B = A. Hence
for each x ∈ X there exists a unique A ∈ X∗ such that x ∈ A and this A is our p(x).
Also ∪A∈X∗
A = X implies that p is onto. The quotient topology J ∗ on X∗ is induced
by p and we say that (X∗,J ∗) is a quotient topology of (X,J ).
Let (X,J ) be a topological space and X∗ be a partition of X into disjoint
subsets whose union is X. Define a relation R on X as follows:
R = {(x, y) ∈ X×X : x, y ∈ A for some A ∈ X∗} then (i) xRx, that is (x, x) ∈ R for
all x ∈ X, (ii) for x, y ∈ X, xRy implies there exists A ∈ A∗ such that x, y ∈ A. Hence
y, x ∈ A and this gives yRx that is for x, y ∈ X xRy ⇒ yRx, (iii) for x, y, z ∈ X, xRy
and yRz implies there exist A,B ∈ X∗ such that x, y ∈ A and y, z ∈ B. Therefore
y ∈ A∩B and this implies that A = B. From this we have x, z ∈ A. Hence xRz. That
is xRy and yRz implies xRz. From (i), (ii) and (ii) we see that R is an equivalence
relation on X and hence this relation R will partition X into disjoint equivalence
classes.
For each x ∈ X, the equivalence classes determined by x is given by
x = {y ∈ X : yRx}. Hence if x ∈ A, for some A ∈ X∗ then x = A. Now it is
easy to see that for U ⊆ X∗, U ∈ J ∗ if and only if ∪A∈U
A is an open subset of X.
Let (X,J ) be a topological space and X∗ be a family of disjoint nonempty subsets
45

of X such that X = ∪A∈X∗
A. Define q : X → X∗ as q(x) = A, where A ∈ X∗ is
such that x ∈ A. Then the topology Jq on X∗ is the largest topology on X∗ which
makes q : (X,J ) → (X∗,Jq) a continuous function is called the quotient topology
(or identification) topology on X∗ induced by q.
Theorem 2.3.2. Let (X∗,Jq) be an identification space (i.e Jq is the identification
topology on X∗ with respect to q) defined as above and (Y,J ′) be an arbitrary
topological space. Then a function f : (X∗,Jq)→ (Y,J ′) is continuous if and only if
f ◦ q : (X∗,Jq)→ (Y,J ′) is continuous.
Proof. Let f : (X∗,Jq) → (Y,J ′) be a continuous function. We know that by
the definition of identification space, q : (X,J ) → (X,Jq) is a continuous function.
Hence the composite function f ◦ q : (X∗,Jq) → (Y,J ′) is a continuous function.
We will have to prove that f : (X∗,Jq) → (Y,J ′) is continuous. So start with an
open set U in Y . That is we will have to prove that f−1(U) is open in (X∗,Jq).
But the subset f−1(U) is open in the identification space if and only if q−1(f−1(U))
is open in (X,J ). But q−1(f−1(U)) = (f ◦ q)−1(U) an open set in (X,J ) (since
f ◦ q : (X,J ) → (Y,J ′) is a continuous function). This is what we wanted to prove
and hence f : (X,Jq)→ (Y,J ′) is a continuous function.
Let (X,J ) be a topological space and Y be a nonempty set. Let f : X → Y
be an onto map. Then X∗ = {f−1(y) : y ∈ Y } is a family of disjoint subsets of X
such that ∪y∈Y
f−1(y) = X. That is X∗ is a partition of X. Let q : X → X∗ be the
map, known as identification map, defined as above. Let J ′ be the largest topology
on Y for which f : (X,J ) → (Y,J ′) is continuous. Then it is easy to prove the
following: �
46

Theorem 2.3.3. Let (X,J ), (Y,J ′) be topological spaces and f : (X,J )onto−−→ (Y,J ′)
be a homeomorphism. Further suppose (Z,J1) is any topological space. Then a
function g : (Y,J ′)→ (Z,J1) is continuous if and only if g ◦ f : (X,J )→ (Z,J1) is
continuous.
Proof. To prove (Y,J ′) and (X∗,Jq) are homeomorphic we will have to define a
map say h : X∗ → Y and prove that this map is a homeomorphism.
Let z ∈ X∗ = {f−1(y) : y ∈ Y } be any element. Then z = f−1(y), for some
y ∈ Y . So let h(z) = h(f−1(y)) = y. The defined map h : X → Y is such that
(h ◦ q)(x) = h(q(x)) = h(f−1(y)) (where y ∈ Y is such that x ∈ f−1(y)) = y = f(x).
That is h ◦ q = f . Let us prove that h is continuous. Let V be an open set in Y .
X
q
hY
X
f
*
Figure 2.1
The given topology J ′ on Y is the largest topology on Y for which
f : (X,J ) → (Y,J ′) is continuous. Hence V is an open set on Y implies f−1(V ) is
an open set in X and hence (h◦q)−1(V ) = q−1(h−1(V )) is an open set in X. Therefore
h−1(V ) is an open set in X∗. That is V is an open set in Y implies h−1(V ) is an open
set in X∗. This implies that h is a continuous map. �
47

• The Torus
Let X = [0, 1] × [0, 1] with the topology J on X induced by the standard
topology on R2 (that is J is the topology on X induced by the Euclidean metric).
Partition X into the subsets of the type:
• the set A = {(0, 0), (0, 1), (1, 0), (1, 1)} consisting of the four corner points,
• all the sets of the form Ax = {(x, 0), (x, 1)} for 0 < x < 1,
• all the sets of the form Ay = {(0, y), (1, y)} for 0 < y < 1,
• all singleton sets of the form {(x, y)}, 0 < x < 1, 0 < y < 1. Then the resulting
identification space is the torus.
Exercise 2.3.4. Let (X,J ), (Y,J ′) be topological spaces and f : X → Y be an onto
map. If f maps open sets in X to open sets in Y (that is f is an open map) then
prove that J ′ is the quotient topology on Y induced by f. �
48

Exercises
1. A function f : Z → X × Y is continuous if and only if its component functions
f1 : Z → X and f2 : Z → Y are both continuous, where f(z) = (x, y) =
(f1(z), f2(z)).
2. Let X and Y be topological spaces. If B1 is basis for the topology on X and B2
is a basis for the topology on Y, then show that B := {B×C : B ∈ B1, C ∈ B2}
is a basis for a topology on X × Y .
3. Let X denote the set of all real numbers with lower limit topology and Y denote
the set of all real numbers with usual topology. Then
(a) find the topologies on (i) X ×X, (ii) X × Y, (iii) Y ×X, (iv) Y × Y,
(b) show that each of the above topologies is Hausdorff,
(c) compare the topologies.
4. Prove or disprove the following:
(a) The diagonal 4 = {x × x : x ∈ R} is closed with respect to the usual
topology on R2.
(b) The diagonal 4 = {x×x : x ∈ R} is closed with respect to the lower limit
topology on R2 = Rl × Rl.
5. Show that a topological space X is Hausdorff (also known as T2-space) if and
only if the diagonal 4 = {x× x : x ∈ X} is closed in X ×X.
6. Let X1, X2, . . . , Xn be topological spaces and let Ai ⊂ Xi, i = 1, 2, . . . , n,
X =n
Πi=1
Xi with product topology. Then show that int(n
Πi=1
Ai) = Π(intAi)
49

7. Let P1 : R2 → R be the projection of R2 onto the x-axis. Show that P1 is open
but not closed.
8. Find the interior points, limit points and boundary points of each of the
following subsets of R2, with respect to each of topology given in question (3a).
(a) A = {(x, y) : x ∈ R, y = 0}.
(b) B = {(x, y) : x > 0, y 6= 0}.
(c) C = A ∪B.
(d) D = {(x, y) : x ∈ Q, y ∈ R}.
(e) E = {(x, y) : x, y ∈ Q}.
(f) F = {(x, y) : x ∈ Q, y ∈ Qc}.
(g) G = {(x, y) : x 6= 0, y ≤ 1x}.
(h) H = {(x, y) : 0 < x2 + y2 ≤ 1}.
(i) I = {(x, y) : 0 < x2 − y2 ≤ 1}.
9. Let Rw : {(x1, x2, x3, · · · ) : xi ∈ R, for all i ∈ N} and let J and Jb be the
product and box topologies on Rw respectively. Suppose f is a map on Rw,
defined as f(x1, x2, x3, · · · ) = (a1x1, a2x2, a3x3, · · · ), where ai > 0 for all i ∈ N.
Then prove or disprove:
(a) f : (Rw,J )→ (Rw,J ) is continuous.
(b) f−1 : (Rw,J )→ (Rw,J ) is continuous.
(c) f : (Rw,J )→ (Rw,Jb) is continuous.
(d) f−1 : (Rw,J )→ (Rw,Jb) is continuous.
(e) f : (Rw,J1)→ (Rw,J ) is continuous.
(f) f−1 : (Rw,J1)→ (Rw,J ) is continuous.
(g) f : (Rw,J1)→ (Rw,Jb) is continuous.
50

(h) f−1 : (Rw,J1)→ (Rw,Jb) is continuous.
10. Let (Xn, dn), n ∈ N be a countable collection of metric spaces and X =∞Πn=1
Xn.
For x = (xn) ∈ X, y = (yn) ∈ Y. Let d(x, y) =∞∑n=1
αndn(xn,yn)
1+dn(xn,yn). Prove that
(i) d is a metric on X, (ii) Jd is the product topology on X and {αn}∞n=1 is a
sequence of positive real numbers such that∞∑n=1
αn is a convergent series.
11. For i = 1, 2 let fi : Xi → Yi be maps between topological spaces. The map
g : X1 ×X2 → Y1 × Y2 is defined by g(x1, x2) = (f1(x1), f2(x2)). Show that
g is continuous if and only if f1 and f2 are continuous.
12. Let X = R and X∗ = {{x}, {1, 12, 13, . . .} : x ∈ RK{1, 1
2, 13, . . . , }}. Define
f : X → X∗ as f(x) = {x} for all x ∈ RK{1, 12, 13, . . . , } and f(x) = {1, 1
2, 13, . . .}
for all x ∈ {1, 12, 13, . . .}. Let JK be the K-topology on R and J ∗ be the quotient
topology on X∗ induced by f. Prove that (X∗,J ∗) is a T1-space. Is (X∗,J ∗) a
Hausdorff space ? Justify your answer.
51

52

Chapter 3
Connected Topological Spaces
3.1 Connected Spaces
Definition 3.1.1. A topological space (X, J ) is said to be a disconnected
topological space if there exist nonempty open sets A and B of X such that
(i) A ∩B = φ, (ii) X = A ∪B.
In such a case B = Ac and A = Bc and hence A and B are closed sets. Also
X contains a nonempty proper subset A (that is A 6= φ,X which is both open and
closed in X.
A topological space (X, J ) is said to be connected if there cannot exist
nonempty closed (open) subsets A and B of X such that (i) A∩B = φ, (ii) X = A∪B.
Equivalently, (X, J ) is connected if and only if φ and X are the only subsets of X
which are both open and closed in X.
Examples 3.1.2. (i) Let X be a set containing at least two elements and A ⊆ X,
A 6= φ, X. Then J = {φ,X,A,Ac} is a topological space. Here A is such that A 6= φ,
A 6= X and A is both open and closed. Hence (X, J ) is not a connected topological
space.
(ii) Let X be a nonempty set and Jf = {A ⊆ X,XKA = Ac finite or Ac = X} then
(X,Jf ) is a topology on X, known as cofinite topology on X.
53
Note. If X is a finite set containing at least two elements then Jf is the discrete
topology on X. In this case (X, Jf ) is not a connected topological space.
What will happen when X is an infinite set and Jf is the cofinite topology on
X. Is (X, Jf ) not connected? In other words can we find a subset A of X such that
A 6= φ and A 6= X but A is both open and closed? A 6= X, A is closed implies A is
a finite set. Also A 6= φ implies such a nonempty finite set cannot be an open set.
Therefore φ and X are the only sets which are both open and closed. This implies
(X, Jf ) is a connected topological space whenever X is an infinite set. ?
3.2 Connected Subsets of the Real Line
Keeping our intuition alive, let us prove that intervals are connected subsets
of R and they are the only connected subsets of R. Recall that a subset J of R is
an interval if and only if whenever a, b ∈ J and a < c < b, we have c ∈ J. Note
that the null set φ and singleton sets are also intervals. For example for x ∈ R,
φ = (x, x) = (1, 1) and {x} = [x, x], the singleton set containing x.
We say that a subset Y of a topological space X is connected if (Y,JY ) is
connected.
First let us prove that if A ⊆ R is not an interval then A is not connected.
Here JA = {A ∩ U : U is an open set in R}. So, we will have to prove that the
topological space (A, JA) is not connected. The given set A is not an interval implies
there exist x, y ∈ A and z ∈ R such that x < z < y and z /∈ A. We know that
(−∞, z), (z,∞) are open sets in R. This implies that (−∞, z) ∩ A and (z,∞) ∩ A
are open sets in (A, JA). Also x ∈ (−∞, z) ∩ A = C and y ∈ (z,∞) ∩ A = D and
A = C ∪D. That is C,D are nonempty open sets in (A, JA) such that C ∩D = φ
54

and A = C ∪D. Hence the topological space (A, JA) cannot be connected. That is
the given subset A of R (which is not an interval) is not connected.
Now let us prove:
Theorem 3.2.1. Every interval in R is connected.
Proof. Let J be an interval and let us assume that J contains at least two elements.
For if J = φ or a singleton set then the null set φ and the whole space J are the
only sets which are both open and closed in J and hence J is connected. Now let
us suppose that there exist nonempty closed sets A, B in J (that is A,B ⊆ J and
A, B are closed sets in (J , JJ), where JJ = {U ∩ J : U is open in R}) such that
J = A ∪ B. Fix a ∈ A, b ∈ B and without loss of generality let us say a < b. Note
that a ∈ A ⊆ J , b ∈ B ⊆ J .
a z b
Figure 3.1
Since J is an interval [a, b] ⊆ J. Let y = sup(A ∩ [a, b]). Now let us prove that
y ∈ A ∩ B. First let us prove that y ∈ A. Let U be an open set in J containing y
(y ∈ [a, b] ⊆ J). Then there exists an open set V in R such that V ∩ J = U. Hence
there exists ε > 0 such that (y− ε, y+ ε) ∩ J ⊆ V ∩ J = U. (If y = a, we are through,
otherwise take 0 < ε < y − a and ε < b − y when y 6= b.) Now y − ε is not an
upper bound for [a, b] ∩ A implies there exists x0 ∈ [a, b] ∩ A such that y − ε < x0.
This implies x0 ∈ (y − ε, y + ε) ∩A ⊆ (y − ε, y + ε) ∩ J ⊆ U. Hence x0 ∈ U ∩ A.
That is, whenever U is an open set in J containing y, then U ∩ A 6= φ. This proves
that y ∈ AJ = A, AJ is the closure of A in J. Also if y = b, then y ∈ B. Suppose
y < b, (y is the supremum of C = A ∩ [a, b] and b is an upper bound of C then take
55

y0 ∈ (y, y + ε). Now y0 ∈ U ∩ B. Hence y ∈ BJ = B. Hence we have y ∈ A ∩ B.
Therefore there cannot exist nonempty closed subsets of A,B in the subspace (J , JJ)
such that A ∩B = φ, A ∪B = J. This proves that J is connected. �
3.3 Some Properties of Connected Spaces
Now let us prove that continuous image of a connected topological space is
connected.
Theorem 3.3.1. Let (X, J ) be a connected topological space and (Y, J ′) be any
topological space. Suppose f : (X, J ) → (Y, J ′) is a surjective continuous map then
the image f(X) = Y is a connected topological space.
Proof. (By contradiction). Let A, B be nonempty open subsets of Y such that
A ∩ B = φ, A ∪ B = Y . Now f is a continuous map, and A, B are open sets in Y
implies that f−1(A), f−1(B) are open sets in X. Also
f−1(A) ∩ f−1(B) = f−1(A ∩B) = φ (3.1)
and
X = f−1(Y ) = f−1(A ∪B) (from 3.1)
= f−1(A) ∪ f−1(B). (3.2)
Since A,B 6= φ, let y ∈ A and y′ ∈ B, and f is a surjective map implies that there exist
x, x′ ∈ X such that f(x) = y and f(x′) = y′ implies f(x) ∈ A and f(x′) ∈ B implies
x ∈ f−1(A) and x′ ∈ f−1(B). Hence f−1(A), f−1(B) are nonempty open subsets of
the connected topological space (X, J ) satisfying Eqs. (3.1) and (3.2). This means
(X, J ) cannot be a connected topological space. That is we have proved: f(X) = Y
is not connected implies X is also not connected and this gives a contradiction. Hence
56

our assumption that (Y , J ′) is not connected is not valid. Therefore (Y , J ′) is a
connected topological space. �
It is to be noted that if X is a connected topological space and f : X → Y is
a continuous function, where Y is any topological space, then the image f(X) is also
a connected topological space. Here we will have to consider f(X) as a subspace of
the given topological space Y . Also if f : X → Y is continuous then f : X → f(X)
is also continuous. Hence this result will follow from the previous result.
Definition 3.3.2. A subspace Y of a topological space (X, J ) is said to have a
separation if and only if there exist nonempty subsets A, B of X such that
(i) Y = A ∪B, (ii) A ∩B = φ = A ∩B. Here A is the closure of A in X.
Example 3.3.3. Let X = R and Y = [0, 2) ∩ (2, 5). Then Y has a separation.
Take A = [0, 2), B = (2, 5), then (i) Y = A ∪ B is satisfied. Now (ii) A ∩ B =
[0, 2] ∩ (2, 5) = φ, and A ∩B = [0, 2) ∩ [2, 5] = φ. Hence from (i) and (ii) we see that
Y has a separation.
Theorem 3.3.4. A subspace Y of a topological space (X, J ) is connected if and only
if there does not exist any separation for Y .
Proof. First let us assume that the subspace Y is connected. This means the
subspace (Y , JY ) is a connected topological space. So, we will have to prove
that Y does not admit any separation. Suppose Y has a separation. Hence there
exist nonempty subsets A,B of X such that Y = A ∪ B, A ∩ B = φ = A ∩ B.
Now AY = A ∩ Y = A ∩ (A ∪ B) = (A ∩ A) ∪ (A ∩ B) = A ∪ φ = A.
This implies that A is a closed subset of (Y , JY ). Similarly BY = B ∩ Y =
(B ∩ (A∪B)) = (B ∩A)∪ (B ∩B) = B. This implies that B is a closed set in
(Y, JY ). Also BcY = Y KB = Y ∩Bc = (A∪B)∩Bc = (A∩Bc)∪(Bc∩B) = A∩Bc = A
57
(since A ∩ B = φ). This means complement of B with respect to Y is A. Hence B
is such that B 6= φ, B 6= Y (since Y = A ∩ B and A 6= φ) and B is both open
and closed in Y . This implies that the subspace (Y , JY ) is a disconnected space.
This is a contradiction and we arrived at this contradiction by assuming that Y has
a separation. Hence there does not exist any separation for Y .
Conversely, now assume that there does not exist any separation for Y . Now
suppose that the subspace (Y , JY ) is a disconnected space. Then there exist
nonempty closed subsets A,B in (Y , JY ) such that Y = A ∪ B and A ∩ B = φ.
Now A ∩ B = A ∩ (Y ∩ B) = (A ∩ Y ) ∩ B = AY ∩ B = A ∩ B = φ. (A is closed in
Y implies AY = A) Similarly, A ∩ B = A ∩ Y ∩ B = A ∩ BY = A ∩ B = φ. (B is
closed in Y implies BY = B.) We have nonempty subsets A, B in X such that
(i) Y = A∪B, (ii) A∩B = φ = A∩B. This means Y has a separation and this gives
a contradiction. We arrived at this contradiction by assuming that the subspace
(Y , JY ) is a disconnected space. Hence the assumption is wrong. That means
(Y , JY ) is connected. �
Theorem 3.3.5. Let (X, J ) be a disconnected topological space and A be a subset
of X such that (i) A 6= φ,X (ii) A is both open and closed in X. Suppose Y is a
nonempty connected subspace of X. Then either Y ⊆ A or Y ⊆ Ac.
Proof. X = A∪B, whereB = Ac implies Y = X∩Y = (A∪B)∩Y = (A∩Y )∪(B∩Y ).
Also (A ∩ Y ) ∩ (B ∩ Y ) ⊆ A ∩ B = A ∩ B = φ (since B = Ac is a closed set in X)
implies (A ∩ Y ) ∩ (B ∩ Y ) = φ. Similarly, (A ∩ Y ) ∩ (B ∩ Y ) ⊆ A ∩B = A ∩B = φ
implies (A ∩ Y ) ∩ (B ∩ Y ) = φ. It is given that Y is a connected subspace of X.
Hence it cannot happen that A ∩ Y 6= φ and B ∩ Y 6= φ. Since Y is a connected
58

subspace of X, Y cannot admit any separation. Hence A ∩ Y = φ or B ∩ Y = φ
implies Y ⊆ Ac or Y ⊆ Bc = A. �
Alternate Proof. Now A∩ Y, B ∩ Y (where B = Ac) are open sets in the subspace
Y such that (i) Y = (A∩Y )∪ (B∩Y ) and (ii) (A∩Y )∩ (B∩Y ) ⊆ A∩B = φ implies
A ∩ Y = φ or B ∩ Y = φ implies Y ⊆ Ac or Y ⊆ A. Let us prove the following:
Theorem 3.3.6. Let (X, J ) be a topological space and Y1, Y2 be connected subspaces
of X. Further suppose Y1 ∩ Y2 6= φ. Then Y1 ∪ Y2 is a connected subspace of X.
Proof. We will have to prove that the subspace Y1∪Y2 cannot admit any separation.
Suppose A, B are subsets of X such that (i) Y1∪Y2 = A∪B, (ii) A∩B = φ = A∩B
(here A is the closure of A in X).
From (i)
Y1 = (Y1 ∩ A) ∪ (Y1 ∩B), (3.3)
and from (ii)
(Y1 ∩ A) ∩ (Y1 ∩B) = φ and (Y1 ∩ A) ∩ (Y ∩B) = φ. (3.4)
It is given that Y1 is a connected subspace. Hence Y1 cannot admit a separation.
Therefore from Eqs. (3.3) and (3.4) we conclude that Y1 ∩A = φ or Y1 ∩B = φ. Let
us say that Y1 ∩ A = φ. This implies that
Y1 ⊆ Ac. (3.5)
Similarly, using the fact that Y2 is a connected subspace we conclude that Y2∩A = φ
or Y2 ∩B = φ. If Y2 ∩B = φ then
Y2 ⊆ Bc. (3.6)
59
From Eqs. (3.5) and (3.6) we have
Y1 ∩ Y2 ⊆ Ac ∩Bc = (A ∪B)c. (3.7)
Also Y1 ∩ Y2 6= φ. Hence there exists an element say x0 ∈ Y1 ∩ Y2. Then from
Eq. (3.7), x0 /∈ A ∪ B, a contradiction to Y1 ∪ Y2 = A ∪ B. Therefore both Y1 ⊆ Ac
and Y2 ⊆ Ac implies Y1 ∪ Y2 ⊆ Ac implies A = φ. (If there exists x ∈ A ⊆ Y1 ∪ Y2
then x ∈ Y1∪Y2 ⊆ Ac.) What we have proved is the following: If (i) and (ii) happens
then that leads to A = φ or B = φ. (Y1 ∩ A = φ or Y1 ∩ B = φ implies Y1 ⊆ Ac or
Y1 ⊆ Bc. So if we assume Y1 ⊆ Bc then we would have arrived at B = φ.) That is
we have proved that Y1 ∪ Y2 cannot admit any separation and this implies Y1 ∪ Y2 is
a connected subspace of X. �
Remark 3.3.7. If X is a topological space and Y1, Y2, . . . , Yn for some n ∈ N is a
finite collection of connected topological spaces such thatn∩i=1
Yi 6= φ then by using
induction we can prove that Y1 ∪ Y2 ∪ · · · ∪ Yn is a connected subset of X. �
In fact using exactly the same idea of proving that the subspace Y1 ∪ Y2 is
connected whenever Y1, Y2 are connected subspaces with the added condition that
Y1 ∩ Y2 6= φ, we prove the following theorem.
Theorem 3.3.8. If {Yα}α∈J is a collection of connected subspaces of a topological
space X and further there exists an x0 ∈ X such that x0 ∈ Yα, for each α ∈ J , then
∪α∈J
Yα is a connected subspace of X.
Proof. Here again we will prove that ∪α∈J
Yα cannot admit any separation. Suppose
A, B are subsets of X such that (i) ∪α∈J
Yα = A∪B, (ii) A∩B = A∩B = φ. Then our
aim is to prove A = φ or B = φ. For each fixed α0 ∈ J, Yα0 = (Yα0 ∩ A) ∪ (Yα0 ∩ B)
60

and (Yα0 ∩ A) ∩ (Yα0 ∩ B) = φ = (Yα0 ∩ A) ∩ (Yα0 ∩B). Hence Yα0 is a connected
subspace of X implies Yα0 ∩ A = φ or Yα0 ∩ B = φ. Let us say Yα0 ∩ A = φ. This
will imply that Yα0 ⊆ Ac. Note that α0 ∈ J is an arbitrary element. Hence for each
α ∈ J, Yα ⊆ Ac or Yα ⊆ Bc. But if Yα1 ⊆ Ac for some α1 ∈ J and Yα2 ⊆ Bc for
some α2 ∈ J then x0 ∈ Yα1 ∩ Yα2 ⊆ Ac ∩ Bc = (A ∪ B)c =
(∪α∈J
Yα
)c. This means
x0 /∈ Yα for some α ∈ J and that gives a contradiction. Therefore Yα ⊆ Ac for all
α ∈ J or Yα ⊆ Bc for all α ∈ J implies ∪α∈J
Yα ⊆ Ac or ∪α∈J
Yα ⊆ Bc implies A = φ or
B = φ. This means ∪α∈J
Yα cannot admit any separation and that is what we wanted
to prove. �
Theorem 3.3.9. Let X be a topological space and Y1, Y2, . . . , Yn, . . . be a collection
of connected topological spaces. Further suppose Yk ∩ Yk+1 6= φ for all k ∈ N. Then∞∪k=1
Yk is also a connected space.
Proof. Now Y1, Y2 are connected subspaces of X and Y1∩Y2 6= φ implies E2 = Y1∪Y2
is a connected subspace. Now E2 is a connected subspace of X and Y3 is a connected
subspace of X. Further Y2 ∩ Y3 ⊆ (Y1 ∪ Y2) ∩ Y3 = E2 ∩ Y3. Hence Y2 ∩ Y3 6= φ
implies E2 ∩ Y3 6= φ implies E3 = E2 ∪ Y3 = Y1 ∪ Y2 ∪ Y3 is a connected subspace of
X. Now use induction to prove that, for each k ∈ N, Ek = Y1 ∪ Y2 ∪ · · · ∪ Yk is a
connected subspace of X. We have a collection {Ek}∞k=1 of connected subspaces of X
such that Y1 = E1 ⊆∞∩k=1
Ek. Also∞∩k=1
Ek 6= φ. Since Y1 6= φ. Hence∞∪k=1
Ek =∞∪k=1
Yk is
a connected subspace. �
Now let us prove that if Y is a nonempty connected subspace of a topological
space X and then it remains connected after adding some (or all) of its limits points
to E.
61

Theorem 3.3.10. Let Y be a nonempty connected subspace of a topological space X
and E be a subset of X such that Y ⊆ E ⊆ Y . Then E is also a connected subspace
of X.
Proof. Let A,B be subsets of X such that (i) E = A ∪ B (ii) A ∩ B = A ∩ B = φ
then Y = Y ∩E = (A∩Y )∪(B∩Y ). Also (A ∩ Y )∩(B∩Y ) = φ = (A∩Y )∩(B ∩ Y ).
Hence Y is a connected subspace of X implies A ∩ Y = φ or B ∩ Y = φ. Let us say
A ∩ Y = φ. This implies Y = B ∩ Y ⇒ Y ⊆ B ⇒ Y ⊆ B. Since, E ⊆ Y , E = A ∪B
and A ∩B = φ we get A ⊆ E ⊆ B and A = A ∩B = φ. That is we have proved that
for subsets A,B of X, E = A ∪ B, A ∩ B = A ∩ B = φ. This implies A = φ. We
arrived at this conclusion by assuming that A∩Y = φ. If we had assumed B∩Y = φ,
then we would have proved that B = φ. Therefore E does not admit any separation
and hence E is a connected subspace of X. �
Theorem 3.3.11. If (X1, J1), (X2, J2) are connected topological spaces, then the
product space X1 ×X2 is also a connected space.
Proof. Fix a1 ∈ X1, a2 ∈ X2. (Note. X1 = φ or X2 = φ ⇒ X1 ×X2 = φ and in this
case X1×X2 is a connected space.) For each x1 ∈ X1, fx1 : X2 → X1×X2 defined as
fx1(x2) = (x1, x2) is a continuous function. Also we know that continuous image of a
connected space is connected. In this case, the continuous image is fx1(X2) = x1×X2.
That is x1 × X2 = {(x1, x2) : x2 ∈ X2} is a connected subspace of the product
space X1 × X2 (refer the vertical line passing through x1). Similarly, X1 × a2 is a
connected subspace of the product space. Also (x1, a2) ∈ (x1 × X2) ∩ (X1 × a2).
Hence (x1 × X2) ∪ (X1 × a2) is a connected subspace of the product space. Let
Tx1 = (x1 ×X2) ∪ (X1 × a2). Also note that (a1, a2) ∈ Tx1 , for each x1 ∈ X1. That is
62

{Tx1} is a collection of connected subspaces of the product space X1 ×X2. Further
(a1, a2) ∈ Tx1 for all x1 ∈ X1. Hence ∪x1∈X1
Tx1 = X1 ×X2 is a connected space.
X XX
X
a
x a
(a , a )
X
X aX
1 22
1
2
1 1
1 2 1 2
Figure 3.2
Now we use mathematical induction to prove: if (X1, J1), (X2, J2), . . . , (Xn, Jn)
are a finite collection of connected topological spaces then the product space
X1 ×X2 × · · · ×Xn is also a connected space. But it is to be noted that we cannot
use (say why?) mathematical induction to prove: If (Xn, Jn), n ∈ N is a collection
of connected topological spaces then the product space X1 × X2 × · · · =∞Πn=1
Xn is
also a connected space. However, we prove the following theorem when we have a
collection (Xα,Jα), α ∈ J (where J is a nonempty index set) of connected topological
spaces. �
Theorem 3.3.12. Let (Xα,Jα), α ∈ J be a collection of connected topological spaces.
Then the product space X = Πα∈J
Xα is also a connected space.
Proof. When J is a finite set we have already proved this result. So let us assume
that J is an infinite set. Also let us assume that each Xα 6= φ. From each Xα, fix an
63
element say aα ∈ Xα. That is we have a function f : J → ∪α∈J
Xα such that
f(α) = aα ∈ Xα for all α ∈ J . That is f ∈ Πα∈J
Xα. We normally write f = (aα)α∈J
and just say that (aα)α∈J ∈ Πα∈J
Xα. If α1, α2, . . . , αk ∈ J then X(α1, α2, . . . , αk) =
{x = (xα)α∈J : xα = aα, when α 6= α1, α2, . . . , αk}. If our J = N and αj = j,
j = 1, 2, . . . , k then X(1, 2, . . . , k) = {x1, x2, . . . , xk, ak+1, ak+2, . . .} = X1×X2×· · ·×
Xk × ak+1 × ak+2 × · · · Note that g(x1, x2, . . . , xk) = (x1, x2, . . . , xk, ak+1, ak+2 . . .)
is a continuous function from the connected space X1 × X2 × · · · × Xk →∞Πn=1
Xn
and its image is X1 × X2 × · · · × Xk × ak+1 × ak+2 × · · · . Hence X(1, 2, . . . , k) =
X1 × X2 × · · · × Xk × ak+1 × ak+2 × · · · is a connected subspace of Πn∈N
Xn) and
X(α1, α2, . . . , αk) is a connected subspace of the product space. Also our fixed
a = (aα)α∈J ∈ X(α1, α2, . . . , αk). Therefore Y = ∪{α1,α2,...,αk}⊆J
X(α1, α2, . . . , αk)
(that is x ∈ Y if and only if there exists k ∈ N and α1, α2 . . . , αk ∈ J such that
x ∈ X(α1, α2, . . . , αk)) is a connected subspace of the product space.
Again Y is a connected subspace of the product space implies Y is also a
connected space. Now let us prove that Y = Πα∈J
Xα = X. So take an element say
x = (xα)α∈J ∈ X our aim is to prove that x ∈ Y . Start with a basic open set say
U = Πα∈J
Uα containing the point x = (xα)α∈J . U is a basic open set in the product
space implies there exists k ∈ N and α1, α2, . . . , αk ∈ J such that Uα = Xα for α ∈ J
and α 6= α1, α2, . . . , αk and Uαj∈ Jαj
for all j = 1, 2, . . . , k. Let y = (yα)α∈J be such
that yαj= xαj
for all j = 1, 2, . . . , k and yα = aα when α 6= α1, α2, . . . , αk. Then
y ∈ U ∩ X(α1, α2, . . . , αk) ⊆ U ∩ Y and hence U ∩ Y 6= φ for every basic open set
U containing x. This implies x ∈ Y . Hence X ⊆ Y . This implies X = Y . Now Y is
a connected subspace of X implies Y is also a connected subspace of X and hence
X = Y is a connected space. �
64

3.4 Connected Components
Now let us define a relation say R on a given topological space (X, J ). We
know that a relation on X is a subset of X ×X. Here R = {(x, y) ∈ X ×X : x, y ∈
Exy for a connected subset Exy of X}. If (x, y) ∈ R then we write xRy (read as x is
related to y). So we say that xRy if and only if there is a connected set containing
x, y. Now it is easy to see that this relation is an equivalence relation. For each x ∈ X,
singleton set {x} is a connected subset of X. That is Exx = {x} is a connected set
containing x, x. Hence xRx for all x ∈ X. Therefore R is reflexive.
Now suppose for x, y ∈ X, xRy this implies there is a connected subset say
Exy of X such that x, y ∈ Exy. But x, y ∈ Exy implies y, x ∈ Exy this implies yRx.
That is for x, y ∈ X, xRy ⇒ yRx and hence R is symmetric.
Now suppose for x, y, z ∈ X xRy and yRz. Now xRy implies there exists a
connected subset say Exy ofX such that x, y ∈ Exy. Similarly, yRz implies there exists
a connected subset say Eyz of X such that y, z ∈ Eyz. Now Exy, Eyz are connected
subsets of X such that y ∈ Exy ∩ Eyz. This gives us Exy ∪ Eyz is a connected set
and further y, z ∈ Exy ∪Eyz. Hence there exists a connected set containing y, z. This
implies yRz. That is we have proved that xRy and yRz implies xRz that is R is
transitive.
Thus R is an equivalence relation on X. Hence this relation will partition the
set X into disjoint equivalence classes.
It is to be noted that for each x ∈ X there is exactly one equivalence class
containing x. Let us denote the equivalence class containing x by [x]. That is for
x ∈ X, [x] = {y ∈ X : yRx} is the equivalence class containing x. Now suppose
65

x ∈ [x], which is true since xRx and also x ∈ [y], for some y ∈ X. What is [y]?
Note that [y] = {z ∈ X : zRy}. If such a situation arises then we aim to prove that
[x] = [y]. So let z ∈ [x]. This implies zRx. Also we have xRy. Now our relation R is
a transitive relation. Hence zRy and xRy together implies that zRy this implies that
z ∈ [y]. That is z ∈ [x] implies z ∈ [y] implies [x] ⊆ [y]. Exactly in the same way we
can prove that [y] ⊆ [x]. Hence [x] = [y], whenever x ∈ [y].
For x, y ∈ X, either [x] ∩ [y] = φ or [x] = [y]. For x ∈ X there is exactly one
equivalence class containing x. Such an equivalence class which we denoted by [x], is
called a connected component (also known as a component or a maximal connected
set containing x. Why should we call [x] as a maximal connected set containing x ?
So we will have to prove that if E is a connected subset of X containing x ∈ E, then
E ⊆ [x]. That is [x] is the largest connected set containing x. Have we proved that
[x] is a connected subset of X?
Note that for each y ∈ [x], there is a connected subset say Ey (Ey is just a
notation) of X containing x, y. That is {Ey}y∈[x] is a collection of connected sets and
x ∈ Ey for all y ∈ [x]. This implies that ∪y∈[x]
Ey is also connected set. It is simple
exercise to see that [x] = ∪y∈[x]
Ey. Hence [x] is a connected set containing x. If E is
a connected set containing x then for each y ∈ E, yRx. Hence E ⊆ [x].
Also we know that if A is a connected subset of a topological space X then A
is also a connected subset of X. Hence [x], the closure of the set [x], is also connected
set containing x. But we have just proved that [x] is the maximal connected set
containing x. Hence [x] ⊆ [x] implies [x] = [x] and [x] is a closed set. Therefore our
maximal connected set containing x is a closed set.
66

Theorem 3.4.1. Intermediate value theorem. Let (X, J ) be a connected
topological space and f : (X, J ) → R be a continuous function. If x, y are points of
X and α is a real number such that α lies between f(x) and f(y). So let us say that
f(x) < α < f(y). Then there exists z ∈ X such that f(z) = α.
Proof. Now f is a continuous function and X is a connected topological space implies
f(X) is a connected subset of R. But we know that every connected subset of R is
an interval. Hence f(X) is an interval in R. Now f(x), f(y) ∈ f(X) such that
f(x) < f(y), f(X) is an interval implies [f(x), f(y)] ⊆ f(X). Suppose α ∈ R such
that f(x) < α < f(y).
f (x) f (y)α
Figure 3.3
In particular α ∈ [f(x), f(y)] ⊆ f(X). That is α ∈ f(X). This implies that there
exists z ∈ X such that f(z) = x. �
Using the fact that [a, b](a, b ∈ R, a < b) is a connected subspace of R, we
prove the following result:
Result 3.4.2. Let f : [a, b]→ [a, b] be a continuous function, then there exists x0 in
[a, b] such that f(x0) = x0.
Proof. (Proof by contradiction:)
Suppose f(x) 6= x for each x ∈ [a, b]. Let A = {x ∈ [a, b] : f(x) < x },
B = {x ∈ [a, b] : f(x) > x}. Since f is a continuous function implies that both A
67

and B are open subsets of [a, b]. Also A ∩B = φ and [a, b] = A ∪B. Hence [a, b] is a
connected topological space implies either A = φ or B = φ.
Suppose A = φ then we get that B = [a, b]. That is [a, b] = {x ∈ [a, b] :
f(x) > x}. In particular b ∈ [a, b] implies f(b) > b and this gives a contradiction to
our assumption that f : [a, b]→ [a, b]. (Note: If B = φ then A = [a, b] and a ∈ [a, b]
implies f(a) < a again we will get a contradiction.) We get a contradiction if we
assume that f(x) 6= x, for every x ∈ [a, b]. Hence there exists at least one x0 ∈ [a, b]
such that f(x0) = x0. �
Note. In the above result such an x0 ∈ [a, b] (satisfying f(x0) = x0) is called a fixed
point of f. ?
Remark 3.4.3. In the proof of the above result we have used the fact that [a, b] is
a connected topological subspace (in addition to the fact that f : [a, b] → [a, b] is a
continuous map). What is to be noted here is we have not used the intermediate value
theorem to prove the above result. Now let us use the intermediate value theorem to
observe the following:
Define g : [a, b] → R as g(x) = f(x) − x then g is a continuous map. Also
g(a) = f(a) − a ≥ 0 and g(b) = f(b) − b ≤ 0. If f(a) = a or f(b) = b then we are
through. If not g(b) = f(b)−b < 0 < f(a)−a = g(a). That is g(b) < 0 < g(a). Hence
by intermediate value theorem there exists x0 ∈ [a, b] such that f(x0) = x0. �
Definition 3.4.4. A topological space (X,J ) is said to be totally disconnected if
and only if the connected components of X are singletons. That is if A is a nonempty
connected subset of X then A is a singleton set.
Exercises 3.4.5. Prove that Q and RKQ = Qc are totally disconnected topological
spaces. 2
68
Now let us introduce a concept known as pathwise connected.
Definition 3.4.6. A topological space (X, J ) is said to be pathwise connected
space if for x, y ∈ X there exists a continuous function say f : [0, 1]→ X such that
f(0) = x, f(1) = y. That is, X is pathwise connected if and only if for x, y ∈ X there
exists a curve joining x and y.
Note. For a, b ∈ R, a < b, [0, 1] is homeomorphic to [a, b]. That is there exists a
bijective continuous function f : [0, 1] → [a, b] such that f−1 : [a, b] → [0, 1] is also
continuous. For let f(t) = (1− t)a+ tb = a+ (b− a)t, 0 ≤ t ≤ 1. Then f is bijective
and f, f−1 are continuous functions. ?
Now let us prove the following:
Theorem 3.4.7. A topological space (X, J ) is pathwise connected if and only if for
x, y ∈ X and a, b ∈ R, a < b there exists a continuous function g : [a, b] → X such
that g(a) = x and g(b) = y.
Proof. Given x, y ∈ X and a, b ∈ R, a < b. Now X is a pathwise connected space
implies there exists a continuous function say f1 : [0, 1]→ X such that f1(0) = x and
f1(1) = y. Now let f2(x) = x−ab−a , x ∈ [a, b]. Now f2 is a continuous function such that
f2(a) = 0 and f2(b) = 1. Hence g : f1 ◦ f2 : [a, b] → X is a continuous function such
that g(a) = f1(f2(a)) = f1(0) = x and g(b) = f1(f2(b)) = f1(1) = y. �
Theorem 3.4.8. Every pathwise connected topological space X is a connected space.
Proof. Suppose X is disconnected. Then there exist nonempty closed subsets A,B
of X such that (i) X = A ∪ B and (ii) A ∩ B = φ. Take x ∈ A, y ∈ B. Now
X is a pathwise connected space implies there exists a continuous function
69

say f : [0, 1] → X such that f(0) = x, f(1) = y. Hence X = A ∪ B implies
f−1(X) = f−1(A ∪B) = f−1(A) ∪ f−1(B).
Also x = f(0) ∈ A implies 0 ∈ f−1(A), y = f(1) ∈ B implies 1 ∈ f−1(B)
and f−1(A), f−1(B) are closed subsets of [0, 1] (f : [0, 1] → X is continuous
A, B are closed sets in X implies f−1(A), f−1(B) are closed sets in [0, 1]). Now
f−1(A), f−1(B) are nonempty closed subsets of [0,1] such that [0, 1] = f−1(X) =
f−1(A) ∪ f−1(B) and f−1(A) ∩ f−1(B) = f−1(A ∩ B) = φ implies [0, 1] is not
connected and this gives a contradiction. Hence our initial assumption namely X is
disconnected is not valid. Therefore X is a connected space. �
It is easy to prove that the continuous image of a pathwise connected space is
pathwise connected.
Result 3.4.9. If X is a nonempty convex subset of Rn (n ∈ N) then X is pathwise
connected and hence X is a connected space.
Proof. For x, y ∈ X, define f : [0, 1] → X as f(t) = (1 − t)x + ty for all t ∈ [0, 1].
Then for tn ∈ [0, 1], tn → t ∈ [0, 1] implies f(tn) → f(t). Hence f is a continuous
function such that f(0) = x and f(1) = y. Therefore X is pathwise connected. �
The following result is known as pasting lemma is very useful in the study of
connected spaces.
Lemma 3.4.10. (Pasting lemma) Let A, B be nonempty closed subsets of a
topological space X. Suppose f : A → Y , g : B → Y are continuous functions
(where Y is a topological space) such that f(x) = g(x), whenever x ∈ A ∩ B. Then
70

h : A ∪B → Y is defined as
h(x) =
f(x) if x ∈ A
g(x) if x ∈ B
is also a continuous function.
Proof. Left as an exercise to the reader.
(Hint. For a nonempty closed subset C of Y , prove that h−1(C) = f−1(C)∪ g−1(C).)
�
Exercises 3.4.11. (i) In the above lemma assume that A,B are nonempty open sets
and arrive at the conclusion that h defined as above is a continuous function.
(ii) Given that (X, J ) is a topological space. For x, y ∈ X define xRy (read as x is
related to y) if there is a path (or say curve) joining x and y. That is there exists a
continuous function f : [0, 1]→ X such that f(0) = x and f(1) = y. 2
Hint. Now xRy implies there exists a continuous function f :[0, 1
2
]→ X such that
f(0) = x, f(12
)= y. Also yRz implies there exists a continuous function
g :[12, 1]→ X such that g
(12
)= y g(1) = z. Now use pasting lemma to prove xRz.
That is it is easy to prove that R is an equivalence relation on X.
Definition 3.4.12. A topological space (X, J ) is locally connected at a point
x in X if and only if for each open set U containing x, there is a connected open set
V such that x ∈ V and V ⊆ U . If (X, J ) is locally connected at each x in X then
we say that (X, J ) is a locally connected topological space.
Note that neither every connected topological space is a locally connected
space nor every locally connected topological space is a connected space.
71

Example 3.4.13. Let B = {(x, y) : 0 < x ≤ 1, y = sin ( 1x)} and X = B. Define
f : (0, 1]→ R2 as f(x) = (x, sin ( 1x)) then f is continuous. Hence (0, 1] is a connected
space implies the image f((0, 1]) = B is a connected subspace of R2. This implies
that B = X is also a connected space and X = B ∪ (0 × [−1, 1]). This space X
is called the topologist’s sine curve and X is neither locally connected nor pathwise
connected. Now U = B((0, 1
2), 1
4
)∩X is an open set containing (0, 1
2).
Now we leave it as an exercise to prove that there cannot exist any connected
open set V satisfying (0, 12) ∈ V and V ⊆ U .
Example 3.4.14. X = (0, 1) ∪ (2, 3) is locally connected but it is not connected.
Theorem 3.4.15. Let Y be a connected open subset of Rn (Rn with Euclidean
metric). Then Y is pathwise connected.
Proof. Fix x ∈ Y . Let us prove that for each y ∈ Y there exists a path joining x
and y. So let A = {y ∈ Y : there is a path joining y and x }. As x ∈ A, A 6= φ. We
aim to prove that A = Y . Let y ∈ A. This implies y ∈ Y, and hence there exists r > 0
such that B(y, r) ⊆ Y . For z ∈ B(y, r). Define f : [0, 1]→ Y as f(t) = (1− t)z + ty.
Then (1− t)z + ty ∈ B(y, r), f is a continuous function satisfying the condition that
f(0) = z and f(1) = y. So f is a path joining z and y. Also y ∈ A implies there exists
a path joining y and x. That is there exists a continuous function say g : [0, 1]→ Y
such that g(0) = y, g(1) = x.
Now define h : [0, 1] → Y as h(t) = f(2t) if 0 ≤ t ≤ 12
and h(t) = g(2t− 1) if
12≤ t ≤ 1. (Note: 0 ≤ t ≤ 1
2⇔ 0 ≤ 2t ≤ 1 and 1
2≤ t ≤ 1 ⇔ 0 ≤ 2t − 1 ≤ 1.) Here
t→ f(2t) is a continuous function on[0, 1
2
]and t→ g(2t−1) is a continuous function
on[12, 1]
and f(2t) = g(2t− 1) when t = 12. Hence by pasting lemma h : [0, 1]→ Y is
a continuous function such that h(0) = z and h(1) = x. So we have a path h joining x
72

and z and hence z ∈ A. This gives that B(y, r) ⊆ A and hence each point y of A is an
interior point of A. This proves that A is an open set in the subspace Y . Now in the
same way we can prove that Y KA is also an open set in Y . That is Y = A ∪ (Y KA),
where A, Y KA are both open sets in Y . As x ∈ A, A 6= φ. It is given that Y is
connected and hence Y KA = φ. Therefore Y = A. Now A is pathwise connected and
hence Y is pathwise connected. (For y, z ∈ A = Y , there is a path joining y and x
also there is a path joining z and x. If there is path joining z and x then there is also
a path joining x and z. Again there is a path joining y and x also a path joining x
and z implies there is a path joining y and z.) �
Example of a topological space which is connected but not pathwise
connected.
Let Y1 = {(0, y) ∈ R2 : −1 ≤ y ≤ 1}, Y2 = {(x, sin(πx)) ∈ R2 : 0 < x ≤ 1}
and X = Y1 ∪ Y2. Let f : (0, 1] → Y2 defined as f(x) = (x, sin(πx)) is a continuous
function, f(0, 1] = Y2 (that is f is surjective) and (0,1] is a connected space implies
the continuous image f(0, 1] = Y2 is a connected space. Also Y ′2 = Y1 and hence
Y 2 = Y1 ∪ Y2 = X. Now Y2 is a connected space implies Y 2 = X is also a connected
space. Now let us prove that X is not pathwise connected. Suppose there exists a
continuous function say g : [0, 1] → X such that g(0) = (0, 1) (that is we want to
prove that there is no path joining (1, 0) and a point of Y2), Y1 is a closed subset of
R2 implies Y1 is also a closed subset of X (X is a subspace of R2) and hence g−1(Y1)
is a closed subset of [0, 1]. Also g(0) = (0, 1) ∈ Y1 implies 0 ∈ g−1(Y1). Now let us
prove that g−1(Y1) is also an open subset of [0,1]. So, let t ∈ g−1(Y1) then g(t) ∈ Y1.
Now B(g(t), 12)∩X is an open set in X and g is a continuous function implies
g−1(B(g(t), 12)∩X) is an open set in [0, 1]. Also t ∈ g−1(B(g(t), 1
2)∩X) implies there
73

exists r > 0 such that (t−r, t+r)∩ [0, 1] ⊆ g−1(B(g(t), 12)∩X). Hence g((t−r, t+r)∩
[0, 1]) ⊆ B(g(t), 12) ∩X, B(g(t), 1
2) ∩X consists of an interval on the y-axis, together
with segments of the curve y = sin(πx), each of which is homomorphic to an interval.
Further any two of these sets are separated from one another in B(g(t), 12)∩Y1. Hence
B(g(t), 12) ∩ Y1 is a connected component of B(g(t), 1
2) ∩ X containing g(t). Also
g(t− r, t+ r) ⊆ B(g(t), 12)∩Y1. That is (t− r, t+ r) ⊆ g−1(B(g(t), 1
2)∩Y1) ⊆ g−1(Y1).
This proves that g−1(Y1) is also an open set. That is g−1(Y1) is a nonempty set
which is both open and closed in [0,1]. Hence [0,1] is a connected space implies
g−1(Y1) = [0, 1]. That is g([0, 1]) ⊆ g(g−1(Y1)) ⊆ Y1. Therefore there cannot exist any
continuous function g : [0, 1]→ X such that g(0) = (0, 1). This proves that X is not
pathwise connected.
74

Exercises
1. Prove that every open subset of the real line is a union of disjoint open intervals.
2. Let (X,J ) be a locally connected topological space and (Y,J ′) be another
topological space. Suppose f : (X,J ) → (Y,J ′) be a homeomorphism (that
is (X,J ) is a homeomorphic to (Y,J ′)) then prove that (Y,J ′) is a locally
connected topological space.
3. Say true or false (Justify your answer)
(a) If A is a connected subset of a topological space then
(i) int(A) = A◦, the interior of A is also a connected subset of X.
(ii) bd(A), the boundary of A, is also a connected subset of A.
(iii) XKA = Ac, the complement of A is also a connected subset of A.
(b) Subset of a connected set is connected.
(c) If A,B are connected subsets of a topological space X then
(i) A ∪B is a connected subset of X.
(ii) A ∩B is a connected subset of X.
(iii) A4B = (AKB) ∪ (BKA) is a connected subset of X.
(iv) AKB is a connected subset of X.
(d) {x = (x1, x2) ∈ R2 : x21 + x22 = 1} is connected subset of R2.
(e) There exists no homeomorphism between R and R2.
(f) There exists a homeomorphism between (0, 1) and (a, b), where a, b ∈ R,
with a < b.
4. Let (X,J ) be a connected topological space and f : (X,J ) → (R,Js) be a
non-constant continuous function. Then prove that X is an uncountable set.
5. Prove that there cannot exist any non-constant continuous function f : R→ Q.6. Is {(x, 1
x) : x > 0} a connected subset of R2? Justify your answer.
75

7. Prove that there cannot exist a homeomorphism between R and S ′ = {(x, y) ∈
R2 : x2 + y2 = 1}.8. Let X be a connected topological space and Y be a topological space and
f : X → Y be a continuous function. Prove that G = {(x, f(x)) : x ∈ X} is a
connected subspace of the product space X × Y.9. In R, find the maximal connected subset containing N (the set of all natural
numbers). Justify your answer.
10. Let (X,J ) be a Hausdorff topological space. If (X,J ) has a base B consisting
of open and closed sets then prove that (X,J ) is totally disconnected.
76

Chapter 4
Compact Topological Spaces
4.1 Compact Spaces and Related Results
Definition 4.1.1. A subset K of a topological space (X,J ) is said to be a compact
set if A is a collection of open sets in X such that K ⊆ ∪A∈A
A then there exists
n ∈ N and A1, A2, A3, . . . , An ∈ A such that K ⊆n∪i=1
Ai. That is K is a compact
subset of a topological space (X,J ) if and only if A is any open cover for K implies
A has a finite subcollection say Af that will also cover K.
Note. If A is a collection of open sets in (X,J ) and K ⊆ X is such that K ⊆ ∪A∈A
A,
then we say that A is an open cover for K. ?
Example 4.1.2. Let X be nonempty set and J be a topology on X. Let K be a
finite subset of X.
Case 1: K = φ.
Then verify that K is a compact set (exercise).
Case 2: K is a nonempty finite set.
In this case, there exists n ∈ N and x1, x2, . . . , xn ∈ X such that K = {x1, x2, . . . , xn}.
Now suppose A is a collection of open sets in X and {x1, x2, . . . , xn} = K ⊆ ∪A∈A
A.
Then for each i ∈ {1, 2, . . . , n}, xi ∈ Ai for some Ai ∈ A . (Note that i 6= j need not
imply Ai 6= Aj.) Now Af = {A1, A2, . . . , An} is a finite subcollection of A such that
K = {x1, x2, . . . , xn} ⊆ A1∪A2∪· · ·∪An = ∪A∈Af
A. That is, we started with an open
77
cover A for K and we could get a finite subcollection Af of A that also covers K.
Hence by the definition, K is a compact subset of (X,J ).
Example 4.1.3. Let X be a nonempty set and Jf = {A ⊆ X : Ac = XKA is a
finite set or Ac = X}. That is, Jf is the cofinite topology on X. We have proved in
example 4.1.2 that every finite subset of any topological space is compact.
So, let us assume that K is an infinite subset of X. Now consider a collection
A of open sets such that K ⊆ ∪A∈A
A. Since we have assumed K is an infinite
set, K 6= φ. Take an element say x0 ∈ K. Now x0 ∈ K ⊆ ∪A∈A
A. This implies
there exists A0 ∈ A such that x0 ∈ A0. Now A0 is a nonempty open set in the
cofinite topological space (X,Jf ) implies XKA0 = Ac0 is a nonempty finite set (or
Ac0 = φ ⇒ A0 = X ⇒ Af = {A0}). Also K ⊆ A0 ⇒ Af = {A0}. Let K ∩ Ac0 =
{x1, x2, . . . , xn}. Since K ⊆ ∪A∈A
A each xi ∈ Ai, i = 1, 2 . . . , n. Now K ⊆ X =
A0∪Ac0 ⇒ K ⊆ (A0∪Ac0)∩K = (A0∩K)∪ (Ac0∩K) ⊆ A0∪A1∪A2∪· · ·∪An. That
is, Af = {A0, A1, A2, . . . , An} or Af = {A0} is a finite subcollection of A that also
covers K. Hence K is a compact subset of (X,Jf ). That is, in a cofinite topological
space every subset is a compact set.
Remark 4.1.4. In a cofinite topological space (X,Jf ), if A is a nonempty open set
then A will almost cover any K ⊆ X. That is, maximum finitely many elements may
not be in A and hence every subset K becomes a compact set. �
Example 4.1.5. Let X be any set and J be a topology on X. Note that J ⊆ P(X),
the collection of all subsets of X. If J is a finite set then every subset K of X is
compact in (X,J ).
Also note that in a cofinite topological space (X,Jf ) every finite subset of
X is closed and if F 6= X, F is not a finite set then F is not closed. Now let us
78

prove that R with usual topology Js is not a compact space. That is (R,Js) is not
a compact space. Now we want to prove that the subset R of the topological space
(R, Js) is not compact. Note that R ⊆∞∪n=1
(−n, n). That is, A = {(−n, n) :
n ∈ N} is an open cover for R. Suppose this open cover has a finite subcollection
say Af = {A1, A2, . . . , , Ak} such that R ⊆k∪i=1
Ai. If Ai ∈ A this implies there exists
ni ∈ N such that Ai = (−ni, ni). So, R ⊆ (−n1, n1)∪ (−n2, n2)∪ · · · ∪ (−nk, nk). Let
n0 = max{n1, n2, . . . , nk}. Then R ⊆ (−n0, n0), a contradiction. Note that n0+1 ∈ R
but n0 + 1 /∈ (−n0, n0). We could arrive at this contradiction by assuming that A
has a finite subcollection that also covers R. Hence such an assumption is wrong.
That is, this particular collection A = {(−n, n) : n ∈ N} is an open cover for R. But
this cannot have any finite subcover. Therefore (R,Js) is not a compact space. Note
that R with cofinite topology Jf is a compact space. That is, (R,Jf ) is a compact
topological space but (R,Js) is not a compact topological space.
Also note that if A is any unbounded subset of R then A is not a compact
subset of the topological space (R,Js). Note that A ⊆∞∪n=1
(−n, n) but A is not a
bounded set (that is A is unbounded set) implies there cannot exist any n0 ∈ N such
that A ⊆ (−n0, n0). (Recall: A is a bounded subset of R if and only if there exists
n0 ∈ N such that |x| < n0 ∀x ∈ A. That is A is bounded if and only if A ⊆ (−n0, n0)
for some n0 ∈ N.)
Now let us prove that a closed subset of a compact topological space is
compact.
Theorem 4.1.6. If A is a closed subset of a compact topological space (X,J ) then
A is a compact set in (X,J ).
79

Proof. Let A be a collection of open sets in X such that A ⊆ ∪B∈A
B. Now A ′=
A ∪ {Ac} is a collection of open sets such that X = A ∪ Ac ⊆ Ac ∪ ( ∪B∈A
B). That
is, A ′ is an open cover for the compact space (X,J ) and hence there exists n ∈ N
and A1, A2, . . . , An ∈ A ′ such that X ⊆ A1 ∪ A2 ∪ · · · ∪ An. If one of Ai = Ac, then
{A1, A2, . . . , Ai−1, Ai+1, . . . , An} is a finite subcover of A that also covers A. If none
of Ai = Ac then {A1, A2, . . . , An} ⊆ A such that A ⊆n∪i=1
Ai. Hence in any case every
open cover A of A has a finite subcollection that also covers A. This implies that A
is a compact subset of (X,J ). �
Recall that a topological space (X,J ) is said to be a Hausdorff topological
space if x, y ∈ X, x 6= y then there exist open sets U , V in X such that x ∈ U, y ∈ V
and U ∩ V = φ.
In a cofinite topological space we have proved that every subset is compact.
In particular (X,Jf ) is a compact topological space for any set X. But if A 6= X is
an infinite subset of X then A is a compact set but it is not a closed set. Now let us
prove that such a thing cannot happen in a Hausdorff topological space.
Theorem 4.1.7. If K is a compact subset of a Hausdorff topological space then K is
a closed set.
Proof. Let us prove that Kc = XKK is an open set. So take x ∈ Kc. Our aim is to
prove that x is an interior point of Kc. That is, we will have to find an open set Ux in
X such that x ∈ Ux ⊆ Kc. Now x 6= y for each y ∈ K. Hence (X,J ) is a Hausdorff
space implies there exist open sets Uy, Vy such that
x ∈ Uy, y ∈ Vy, Uy ∩ Vy = φ. (4.1)
80

Now {Vy : y ∈ K} is an open cover for the compact set K. Hence this implies there
exist y1, y2, . . . , yn ∈ K such that K ⊆n∪i=1
Vyi. Let Ux =n∩i=1
Uyi (refer Eq. (4.1))
then Ux is an open set containing x and Ux ∩K ⊆ Ux ∩ (n∪i=1
Vyi) =n∪i=1
(Ux ∩ Vyi) ⊆n∪i=1
(Uyi ∩ Vyi) = φ. This implies Ux ∩K = φ ⇒ Ux ⊆ Kc. Therefore, each x ∈ Kc is
an interior point of Kc. Hence Kc is an open set and therefore K is a closed set. �
Note. Let (X,J ) be a topological space and Y ⊆ X. Then JY = {A ∩ Y : A ∈ J }
is a topology on Y. ?
So, now it is easy to prove:
Theorem 4.1.8. A subset Y of a topological space (X,J ) is compact if and only if
whenever A is a collection of open sets in (Y,JY ) such that Y = ∪A∈A
A then there
exists n ∈ N and A1, A2, . . . , An ∈ A such that Y =n∪i=1
Ai.
Proof. Let us assume the given hypothesis. That is, assume that whenever A is
a collection of open sets in the topological space (Y,JY ) then this open cover A
for Y has a finite subcover. Now we will have to prove that the given subset Y of
the topological space (X,J ) is compact. So start with a collection say B of open
sets in (X,J ) satisfying the condition that Y ⊆ ∪B∈B
B (recall the definition). Now
B ∈ B ⊆ J ⇒ B ∩ Y ∈ JY . Hence Y ⊆ ∪B∈B
B implies Y = ∪B∈B
B ∩ Y . That
is, A = {B ∩ Y : B ∈ B} is a collection of open sets in (Y,JY ) which also covers
Y . Hence by the given hypothesis there exists n ∈ N and B1, B2, . . . , Bn ∈ B such
that Y =n∪i=1
(Bi ∩ Y ). This implies that Y ⊆n∪i=1
Bi. Now we have proved: whenever
B is a collection of open sets in (X,J ) which covers Y then there exists n ∈ N and
B1, B2, . . . , Bn ∈ B such that Y ⊆n∪i=1
Bi. Therefore by our definition the given subset
Y of (X,J ) is a compact set. The proof of Y is a compact subset of (X,J ) implies
81

that the given hypothesis is satisfied follows in similar lines and hence the proof is
left as an exercise. �
From what we have proved, we observe that a subset Y of a topological
space (X,J ) is compact if and only if, with respect to the induced topology JY ,
the topological space (Y,JY ) is compact.
Now let us prove that continuous image of a compact space is compact.
Theorem 4.1.9. Let (X,J ) be a compact topological space and (Y , J ′) be any other
topological space. Let f : (X, J ) → (Y , J ′) be a continuous function. Then the
image f(X) is a compact subset of Y.
Proof. To prove the subset f(X) of (Y,J ′) is a compact set, we start with a collection
say A of open sets in (Y,J ′) which satisfies
f(X) ⊆ ∪A∈A
A. (4.2)
Now A ∈ A implies A is open in (Y,J ′). Hence f : (X,J ) → (Y,J ′) is
a continuous function implies that f−1(A) is open in (X,J ). From Eq. (4.2)
X = f−1(f(X)) ⊆ f−1(∪
A∈AA
)= ∪
A∈Af−1(A). This impliesA′ = {f−1(A) : A ∈ A }
is an open cover for the compact topological space (X,J ). Hence there exists n ∈ N
and A1, A2, . . . , An ∈ A such that X ⊆n∪i=1
f−1(Ai) (here X =n∪i=1
f−1(Ai)). This
implies that f(X) = f(
n∪i=1
f−1(Ai))
=n∪i=1
f (f−1(Ai)) ⊆n∪i=1
Ai. We have proved:
any arbitrary open cover A of f(X) has a finite subcover. Hence by the definition,
f(X) is a compact subset of (Y,J ′). �
Using the above theorem and the result that every compact subset of a
Hausdorff space is closed we prove:
82

Theorem 4.1.10. Let (X, J ) be a compact topological space and (Y, J ′) be a
Hausdorff topological space. Let f : (X, J ) → (Y, J ′) be a bijective continuous
map. Then the inverse map f−1 : (Y, J ′) → (X, J ) is also a continuous map. That
is f is a homeomorphism.
Proof. Take an open set A in (X,J ). Now f is a bijective map implies that
(f−1)−1(Ac) = f(Ac) (4.3)
Note that Ac is a closed subset of the compact space implies Ac is a compact set
implies f(Ac) is a compact subset of the Hausdorff space. This implies f(Ac) is a
closed set in Y . Hence from Eq. (4.3) (f−1)−1(Ac) is a closed set implies
f(A) = (f−1)−1(A) = Y K (f−1)−1
(Ac) is an open set.
We have proved: A is an open set in (X,J ) implies (f−1)−1(A) is an open set
in Y . Hence f−1 : (Y, J ′) → (X, J ) is a continuous map. �
Remark 4.1.11. To prove the above theorem it is also enough to prove that if B is
a closed subset of X then f(B) is a closed subset of Y . �
Definition 4.1.12. A collection F of subsets of a given set X is said to have
finite intersection property (f.i.p) if for any n ∈ N and F1, F2, . . . , Fn ∈ F
thenn∩i=1
Fi 6= φ.
Theorem 4.1.13. A topological space (X, J ) is a compact space if and only if
whenever F is a collection of closed subsets of X which has f.i.p then ∩F∈F
F 6= φ.
Proof. Assume that (X,J ) is a compact topological space. Now start with a
collection F of closed subsets of X which has the f.i.p. Our aim is to prove
∩F∈F
F 6= φ. To achieve this, let us use the method of proof by contradiction.
83

Suppose ∩F∈F
F = φ. Then by the DeMorgan’s law
(∩
F∈FF
)c= ∪
F∈FF c = X. This
implies {F c : F ∈ F} is an open cover for the compact space. Hence there exists
n ∈ N and F1, F2, . . . , Fn ∈ F such that X =n∪i=1
F ci ⇒ Xc =
(n∪i=1
F ci
)c=
n∩i=1
Fi.
Thereforen∩i=1
Fi = φ, a contradiction to the fact that F has the finite intersection
property. We arrived at this contradiction by assuming that ∩F∈F
F = φ. Hence this
is not a valid assumption. This implies ∩F∈F
F 6= φ. Let us leave the converse part as
an exercise. �
Now we prove that real valued continuous function on a compact topological
space attains its maximum.
Theorem 4.1.14. Let (X, J ) be a compact topological space and Js be the usual
topology on R. Let f : (X, J ) → (R,Js) be a continuous function. Then there exists
x0 ∈ X such that f(x) ≤ f(x0) for all x ∈ X. That is f attains its maximum at x0.
Proof. Let us use the method of proof by contradiction. Then for a given a ∈ X, f
cannot attains its maximum at a. Hence there exists a′ ∈ X such that f(a) < f(a′).
This means that f(a) ∈ (−∞, f(a′)). (Fix any one a′ ∈ X satisfying f(a) < f(a′).)
Hence f(X) ⊆ ∪a∈X
(−∞, f(a′)).
f(a) f(a )'
Figure 4.1
This implies that A = {(−∞, f(a′)) : a ∈ X} is an open cover for the compact
subspace f(X) of R (continuous image of a compact space is compact). Hence there
exist a1, a2, . . . , an ∈ X such that f(X) ⊆n∪i=1
(−∞, f(a′i)). This implies f(X) ⊆
(−∞, f(a0)) for some a0 ∈ {a′1, a′2, . . . , a′n}. Hence for this a0 ∈ X by our assumption
84

there exists a a′ ∈ X such that f(a0) < f(a′0). But f(X) ⊆ (−∞, f(a0)) implies
f(a′0) < f(a0). Hence we have got a contradiction. This means f(a) < f(a′) cannot
be true for all a ∈ X and hence there should exist at least one x0 ∈ X such that
f(x) ≤ f(x0) for all x ∈ X. �
Remark 4.1.15. In a similar way we can prove that continuous image of a compact
set attains its minimum at a point y0 ∈ X. �
Theorem 4.1.16. Tychonoff. Let X and Y be compact topological spaces. Then
the product space X × Y is compact.
Proof. For each x0 ∈ X, y → (x0, y) is a surjective continuous function and Y is a
compact space implies x0 × Y is a compact subset of X × Y. Let A be a collection of
basic open sets such that X × Y = ∪U×V ∈A
U × V.
ForX = [a, b]Y = [c, d]
Y
X
a b
c
d
W Yx0
x0( (
Figure 4.2
This implies that x0×Y ⊆ ∪U×V ∈A
U×V implies there exist U1×V1, U2×V2, · · · , Un×Vn
such that
x0 × Y ⊆ (U1 × V1) ∪ (U2 × V2) ∪ · · · ∪ (Un × Vn). (4.4)
85
Also if for some i, (Ui×Vi)∩ (x0×Y ) = φ, then we do not require to include such an
Ui×Vi in our finite subcover {Ui×Vi}ni=1. So assume that each (Ui×Vi)∩(x0×Y ) 6= φ.
This in turn implies that xo ∈ Ui, ∀ i = 1, 2, . . . , n and hence x0 ∈ Wx0 =n∩i=1
Ui. Now it is clear that Wx0 × Y ⊆ (U1 × V1) ∪ (U2 × V2) ∪ · · · ∪ (Un × Vn).
Consider (x, y) ∈ Wx0 × Y. Then x ∈ Ui for all i and y ∈ Y. Hence from Eq. (4.4),
(x0, y) ∈ Uj × Vj for some j. This implies (x, y) ∈ Uj × Vj for the same j. That is for
each x0 ∈ X, the tube Wx0 × Y is covered by finitely many members of A.
Now let us prove that X × Y is covered by finitely many such tubes Wx × Y.
Now {Wx : x ∈ X} is an open cover for X. Hence X is a compact space implies there
exist x1, x2, . . . , xk ∈ X such that X =k∪i=1
Wxi . Now (x, y) ∈ X × Y ⇒ x ∈ Wxi for
some i, 1 ≤ i ≤ k and hence (x, y) ∈ Wxi×Y . This implies that X×Y ⊆k∪i=1
Wxi×Y
and hence X ×Y is covered by finitely many members of A. This proves that X ×Y
is a compact topological space. �
4.2 Local Compactness
A Hausdorff topological space (X, J ) is said to be locally compact if and only
if for each x ∈ X and for each open set U containing x there exists an open set V
containing x such that V is compact and V ⊆ U . Now it is easy to prove that a
Hausdorff topological space (X, J ) is locally compact if and only if for each x ∈ X
there exists an open set V such that x ∈ V and V is a compact set in X.
Examples 4.2.1. (i) If X is a compact Hausdorff space then X is locally compact.
(ii) Rn with Euclidean topology is locally compact but not compact. Here n ∈ N
and J is the topology induced by the metric d((x1, x2, . . . , xn), (y1, y2, . . . , yn)) =( n∑k=1
|xk − yk|2) 1
2 .
86
Also it is easy to prove that if, for 1 ≤ p ≤ ∞, dp((x1, x2, . . . , xn), (y1, y2, . . . , yn)) =( n∑k=1
|xk − yk|p) 1
p and d∞((x1, x2, . . . , xn), (y1, y2, . . . , yn)) = max{|xk − yk| : k =
1, 2, . . . , n} then dp is a metric on Rn. (Note. Proof of dp(x, y) ≤ dp(x, z) + d(z, y) for
all x, y, z ∈ Rn is not that easy.)
For x = (x1, x2, . . . , xn) ∈ Rn, y = (y1, y2, . . . , yn) ∈ Rn, ‖x + y‖ ≤ ‖x‖ + ‖y‖
is known as Minkowski’s inequality, 1 ≤ p ≤ ∞.
If we use this inequality then dp(x, y) = ‖x − y‖p = ‖(x − z) + (y − z)‖p
≤ ‖x− z‖p + ‖z − y‖p = dp(x, z) + dp(z, y).
Also it is to be noted that the topology Jp on Rn induced by the metric dp is
same as J2 = J .
Definition 4.2.2. A topological space (X,J ) is said to be limit point compact if
every infinite subset of X has a limit point.
Theorem 4.2.3. Every compact topological space (X,J ) is limit point compact.
Proof. Let A be an infinite subset of X. Suppose A′ = φ. That is A does not have
any limit point. Note that A = A ∪ A′ = A implies A is a closed set, then x ∈ A
implies x /∈ A′ implies there exists an open set Ux such that x ∈ Ux, Ux ∩AK{x} = φ.
(That is Ux ∩ A ∩ {x}c = φ ⇒ Ux ∩ A = {x}. Now {Ux : x ∈ A} is an open cover
for the closed subset A of the given compact topological space. Hence there exists a
natural number n and x1, x2, . . . , xn ∈ A such that A ⊆ Ux1∪· · ·∪Uxn . This gives that
A = (Ux1 ∪· · ·∪Uxn)∩A = (Ux1 ∩A) ∪(Ux2 ∩A) ∪ · · · ∪ (Uxn ∩A) = {x1, x2, . . . , xn}.
Hence we have arrived at a contradiction by assuming A′ = φ. Therefore A′ 6= φ.
That is we have proved that every infinite subset A of the given compact topological
space has at least one limit point. This means that (X,J ) is a limit point compact
topological space. �
87

What about the converse of the above theorem? Is every limit point compact
topological space compact? Limit point compact does not imply compact.
Example 4.2.4. Let X = {0, 1}, J = {φ,X} and Y = N = {1, 2, . . .}, the set of all
natural numbers and J ′ = P(N), that J ′ is discrete topology on N. Let X0 = X×Y
be the product space. Here {X ×{n}} is an open cover for X ×Y . But for any fixed
k ∈ N, X×Y = X×N * (X×{1})∪· · ·∪ (X×{k}) (note: (1, k+1) /∈k∪j=1
X×{j}).
This gives that X × Y is not a compact topological space.
Now let A be a nonempty subset of X × Y . Then there exists k ∈ N such
that (0, k) ∈ A or (1, k) ∈ A. Let us say (0, k) ∈ A. In this case we claim that
(1, k) ∈ A′. Take a basic open set U containing (1, k) then U = X × {k}. Now
(0, k) ∈ U ∩ AK{(1, k)} 6= φ. Hence we have proved that (1, k) is a limit point of A.
Note that if (1, k) ∈ A then we can prove that (0, k) is a limit point of A. So we have
proved that every nonempty subset A of X ×Y has a limit point. In particular every
infinite subset of X ×Y has a limit point. Therefore X ×Y is a limit point compact.
4.3 One Point Compactification of a Topological Space (X,J )
It is given that (X, J ) is a non compact Hausdorff topological space. Our
aim is take an element say ∞ (just a notation) which is not in X. For each x ∈ X,
we have open sets containing x. For ∞ ∈ X? = X ∪ {∞} we aim to define open sets
satisfying: If U is an open set containing ∞ then each such open set is so large that
the complement of U (with respect to X∗) is rather a small set. That is we want
that X?KU = C, where C is a compact set in (X,J ) and since ∞ ∈ U , ∞ /∈ C. So,
if we start with a collection A of open sets in our new topological space (note: we
have not yet defined such a topology on X?) which covers X?, then∞ ∈ A0 for some
88

A0 ∈ A. Fix one such A0. Now X?KA0 = C a compact subset of (X, J ).
So, if our proposed topology say J ? on X? is such that J ?X = J then A is also an
open cover for C and C is a compact subspace of (X, J ) implies C is also a compact
subspace of (X?, J ?). Hence there exists n ∈ N and A1, A2, . . . , An ∈ A such that
C ⊆ A1 ∪A2 ∪ · · · ∪An. Therefore X? = (X?KA)∪A = C ∪A0 ⊆ A1 ∪ · · · ∪An ∪A0.
Hence every open cover A of (X?, J ?) has a finite subcover. So we see that if we
could define such a topology J ? on X? such that J ?X = J then (X?, J ?) is a compact
topological space.
We also want to retain the Hausdorff property. So keeping these points in
mind we define J ? as follows:
• if a subset A of X? is such that ∞ /∈ A then A ⊆ X. In such a case A ∈ J ? if
and only if A ∈ J ,
• if∞ ∈ A then, A ∈ J ∗ if and only if A = X?KC, for some compact subset
C of X.
Now it is easy to prove that J ? is a topology on X?.
Theorem 4.3.1. Let (X, J ) be a locally compact Hausdorff space. Then there exists
a topological space (X?, J ∗) satisfying the following conditions:
(i) (X, J ) is a subspace of (X?, J ?),
(ii) X?KX is a set containing exactly one element,
(iii) (X?, J ?) is a compact Hausdorff space.
Proof. Keeping the above requirements in mind we have defined J ∗, we have taken
care that J ⊆ J ? and J ∗X = J . Also X?KX = {∞}.
89
Now let us prove that (X?, J ?) is a compact Hausdorff space. So start with
an collection A of open sets in (X?, J ?) (that is A ⊆ J ?) such that X? = ∪A∈A
A.
Now ∞ ∈ X? implies ∞ ∈ A0 for some A0 ∈ A. It is quite possible that ∞ belongs
to more than one such A ∈ A. From such A just fix one A0 ∈ A. By the definition
of J ∗, X?KA0 = C is a compact subset of X. Note that A is a collection of open
sets in X? and C is a compact subspace of X, and hence of X∗. Now C ⊆ ∪A∈A
A
implies there exists n ∈ N and A1, A2, . . . , An ∈ A such that C ⊆ A1 ∪ A2 ∪ · · · ∪ An
implies X? = (X?KC) ∪ C ⊆ A0 ∪ A1 ∪ · · · ∪ An (X?KA0 = C implies A0 = X?KC)
(it is possible that A0 = Aj, for some j ∈ {1, 2, . . . , n}. So we have proved that
X? ⊆ A0 ∪A1 ∪ · · · ∪An. This means that the started open cover A of X? has finite
subcover {A0, A1, A2, . . . , An}. Hence (X?, J ?) is a compact space.
Now let us prove that (X?, J ?) is a Hausdorff space. So start with x, y ∈ X?
with x 6= y.
Case 1: x, y ∈ X (means x 6=∞, y 6=∞).
Now x, y ∈ X, (X, J ) is a Hausdorff topological space implies there exist U, V ∈ J
such that (i) x ∈ U , y ∈ V, (ii) U ∩ V = φ. But J ⊆ J ?. Hence we have U, V ∈ J ?
satisfying (i) and (ii) and this is what we wanted to prove.
Case 2: x ∈ X, y =∞.
Here we require the fact that (X, J ) is locally compact space. Now x ∈ X, (X, J )
is locally compact Hausdorff space implies there exists an open set U containing x
such that C = U is a compact subset of (X, J ) (here U is the closure of U in X).
Hence by the definition of J ?, V = X?KC is an open set containing ∞ and U is an
open set containing x. Further U ∩ V = φ and this is what we wanted to prove. �
90

Remark 4.3.2. It is easy to prove that ∞ is a limit point of X. To prove this, start
with an open set U containing ∞. Then we have to prove that U ∩ X 6= φ. If X
is not a compact space, then U ∩ XK{∞} = U ∩ X 6= φ. Hence if (X, J ) is not a
compact Hausdorff space then ∞ is a limit point of X. �
Examples 4.3.3. (i) Take X = (a, b] and consider X as a subspace of R here
a, b ∈ R, a < b). Now X is considered as a subspace of R, is a locally compact
Hausdorff space of R. Also X is not a compact space.
What is the one point compactification of X ? Here our X = (a, b] and a /∈ X.
So take ∞ = a. Note that while defining the one point compactification of X we
just took an object or (say an element) which we denoted by ∞ and ∞ /∈ X. So
what we need is ∞ /∈ X. Now what are the open sets containing our ∞ = a in X?.
U ⊆ X? is an open set containing a if and only if X?KU = C is a compact subset of
X. Now it is easy to prove that (X?, J ∗) is homeomorphic to [a, b] as f(x) = x for
all x ∈ X∗. Now let us prove that f is a homeomorphism. Here it is enough to prove
that f is a continuous map. So start with a nonempty open set U in [a, b] (here [a, b]
is considered as a subspace of R).
Case 1: a /∈ U .
Then U ⊆ (a, b]. In this case by our definition U is open in X?. That is f−1(U) = U
is an open set in X?.
Case 2: a ∈ U .
It is enough to consider a basic open set containing a. Hence U = [a, a+ ε) for some
0 < ε < b− a. Is f−1(U) = f−1([a, a+ ε)) is an open set in (X∗,J ∗). Note that U is
an open set containing a if and only if X?KU = [a, b]K[a, a + ε) is a compact subset
of X(X = (a, b]). In our case X?KU = [a + ε, b] which is a compact subset of (a, b].
91

Hence from our definition of J ∗, f−1(U) is an open set in X∗. So from cases 1 and 2
we see that f is a continuous map. Now f : (X? J ?) → [a, b] such that
• f is bijective and continuous.
• (X?, J ?) is a compact space.
• [a, b] is Hausdorff space implies f is a homeomorphism.
Hence we have proved that there is a homeomorphism between the one-point
compactification of (X? J ?) and the compact Hausdorff space [a, b] and our X = (a, b]
is such that X is proper subspace of [a, b] whose closure equals [a, b]. In such a case
we say that [a, b] is a compactification of X.) So we define compactification of a
topological space (X, J ) as follows:
Definition 4.3.4. A compact Hausdorff topological space (Y , J ∗) is said to be a
compactification of a topological space (X, J ) if and only if
(i) (X, J ) is a proper subspace of (Y , J ?),
(ii) X = Y .
s
f (s)
f ( N ) = ∞
f (x) f (x)
N
xx
Figure 4.3
92
Note. If Y KX is a single point then we say that (Y, J ∗) is the one point
compactification of (X, J ). Now it is easy to prove the following statements:
(i) the one point compactification of R is homeomorphic to the unit circle
S1 = {(x1, x2) ∈ R2 : x21 + x22 = 1},
(ii) the one point compactification of R2 is homeomorphic to the sphere
S2 = {(x1, x2, x3) ∈ R2 : x21+x22+x23 = 1}. So if we identify R2 with the complex plane
(there is a homeomorphism between R2 and C) then the one point compactification
C ∪ {∞} of C is known as the Riemann sphere or the extended complex plane. ?
4.4 Tychonoff Theorem for Product Spaces
Now let us prove that if (Xα,Jα), α ∈ J is an arbitrary collection of compact
topological spaces then the product space Πα∈J
Xα is also a compact topological space.
This theorem is due to Tychonoff and different proofs are available in the literature.
To prove Tychonoff theorem we will use Zorn’s lemma. Let us recall the following:
Definition 4.4.1. Let X be a nonempty set and R ⊆ X ×X, that is R is a relation
on X. If (x, y) ∈ R then we say that x is related to y and write x ≤ y. The pair
(X,R) is said to be a partially ordered set if and only if
(i) x ≤ x (≤ is a reflexive),
(ii) for x, y ∈ X, x ≤ y and y ≤ x ⇒ x = y. (That is ≤ is against symmetry in the
sense that x ≤ y and y ≤ x can happen only when x = y.) In this case we say that
≤ is antisymmetry,
(iii) for x, y, z ∈ X x ≤ y and y ≤ z ⇒ x ≤ z. (≤ is transitive.)
In this case we say that (X,≤) is a partially ordered set (PO set).
93

Definition 4.4.2. Let (X,≤) be a partially ordered set and A be a nonempty subset
of X. Then an element x ∈ X (note: x need not be in A) is called an upper bound
of A if and only if a ≤ x for all a ∈ A. An element y ∈ Y is called a lower bound of
A if and only if y ≤ a for all a ∈ A. If there exists an x0 ∈ X such that (i) x0 is an
upper bound of A, (ii) x ∈ X is an upper bound of A implies x0 ≤ x then such an
upper bound x0 is called the least upper bound (lub) of A and we can easily show
that l.u.b of A is unique, when it exists. An element x0 ∈ X is called the greatest
lower bound (glb) of A if it satisfies the following: (i) x0 is a lower bound of A, (ii)
if y0 ∈ X is a lower bound of A implies y0 ≤ x0.
Definition 4.4.3. An element x0 ∈ X of a partially ordered set is called a maximal
element of X if x ∈ X is such that x0 ≤ x then x = x0. An element y0 ∈ X is called
a minimal element of X if y ∈ X is such that y ≤ y0 then y = y0.
Example 4.4.4. Let X = {1, 2, 3, 4, 5}, R = {(1, 2), (3, 4), (n, n) : n ∈ {1, 2, 3, 4, 5}}.
If (x, y) ∈ R then we say that x ≤ y. Here 2,4, 5 ∈ X and they are maximal elements
of X. Note that (2,3) /∈ R and hence 2 is not related to 3. That is 2 ≤ 3 is not true.
Similarly 2 is not related to 4 and 2 is not related to 5. So 2 is not smaller than other
elements of X and hence 2 is a maximal element of X. Since 3 ≤ 4 and 3 6= 4, 3 is not
maximal element of X. If y0 ∈ X is such that y0 is not larger than any other element
of X then we say that y0 is a minimal element of X. That is if there exists y ∈ X
such that y ≤ y0 then y = y0.
A nonempty subset A of X is said to be a chain (also known as totally ordered
set) if for x, y ∈ A, x ≤ y or y ≤ x. That is any pair of elements x, y in A are
comparable.
Now we are in a position to state Zorn’s lemma:
94

Lemma 4.4.5. Zorn’s Lemma. Let (X,≤) be a partially ordered set. Further
suppose every chain C ⊆ X has an upper bound in X. Then X will have at least one
maximal element.
We observe the following: A topological space (X,J ) is compact if and only
if whenever A is a collection of subsets of X which has finite intersection property
(f.i.p) then ∩A∈A
A 6= φ.
Theorem 4.4.6. Tychonoff theorem. Let (Xα,Jα), α ∈ J be a collection of
compact topological spaces. Then the product space ( Πα∈J
Xα,J ) is also a compact
space.
Proof. Start with a collection A of subsets of X = Πα∈J
Xα which has f.i.p. Then we
aim to prove that ∩A∈A
A 6= φ.
Step 1:
Let F = {D : D is a collection of subsets of X containing A and D has f.i.p }.
For D1,D2 ∈ F , define D1 ≤ D2 if D1 ⊆ D2. Then (F ,≤) is a partially ordered
set. Now let C be a chain in F and A0 = ∪D∈CD (here C ⊆ F and D ∈ F). It is
easy to prove that A0 is an upper bound for C. For this, we will have to prove that
A0 ∈ F and D ≤ A0 for all D ∈ C. First let us prove that A0 has f.i.p. Let Aj ∈ A0
for j = 1, 2, . . . , n. Then Aj ∈ Dj, for some D1,D2, . . . ,Dn ∈ C. As C is a chain for
j ∈ {1, 2, . . . , n} either Di ⊆ Dj or Dj ⊆ Di. Hence there exists k, 1 ≤ k ≤ n such
that Dj ⊆ Dk for all j ∈ {1, 2, . . . , n}. Then Aj ∈ Dk for all j and Dk has f.i.p impliesn∩j=1
Aj 6= φ. Also A ⊆ A0. Hence A0 ⊆ F . By the definition of A0, D ⊆ A0 for all
D ⊆ C. This proves that A0 ∈ F is an upper bound for C.
Now we have proved that every chain C in F has an upper bound in F .
Therefore by Zorn’s lemma F will have a maximal element say B ∈ F . This B ∈ F is
95

such that (i) A ⊆ B, B has f.i.p, (ii) whenever A′ is a collection of subsets of X such
that A ⊆ A′, A′ has f.i.p then A′ ⊆ B.
Step 2: Now let us prove that B has the following properties:
(i) For n ∈ N, A1, A2, . . . , An ∈ B implies A1 ∩ A2 ∩ · · · ∩ An ∈ B.
(ii) If A is subset of X such that A ∩B 6= φ, for all B ∈ B then A ∈ B.
To prove (i), let A0 = A1 ∩ A2 ∩ · · · ∩ An and B0 = B ∪ {A0}. Then B0 ∈ F
and B ⊆ B0. Since B is maximal, B = B0. This proves that A0 ∈ B.
To prove (ii), take B0 = B ∪ {A}. Then B0 ∈ F and hence by step 1, A ∈ B.
Step 3: Let us prove that ∩A∈B
A 6= φ.
For each α ∈ J , {Pα(A) : A ∈ B} is a collection of subsets of (Xα,Jα). If
A1, A2, . . . , An ∈ B, then B has f.i.p andn∩j=1
Aj 6= φ. Let x ∈n∩i=1
Aj. Now
Pα(x) ∈ Pα(Aj) for all j = 1, 2, . . . , n. Hence {Pα(A) : A ∈ B} is a collection of
subsets of the compact topological space (Xα,Jα). Further this collection has f.i.p.
This gives that ∩A∈B
Pα(A) 6= φ. Let xα ∈ ∩A∈B
Pα(A) and x = (xα)α∈J . (That is,
we define f : J → ∪α∈J
Xα as f(α) = xα ∈ Xα and we identify f with x.) Now
we aim to prove that x ∈ A, for each A ∈ B. So fix A ∈ B and let P−1β (Vβ) be
a subbasic open set containing x. Now x = (xα) ∈ P−1β (Vβ) implies xβ ∈ Vβ. We
have xβ ∈ Pβ(A) and hence Vβ is an open set in (Xα,Jα) containing xβ implies
Vβ ∩ Pβ(A) 6= φ implies there exists y ∈ A such that Pβ(y) ∈ Vβ. This gives that
y ∈ P−1β (Vβ)∩A. Hence P−1β (Vβ)∩A 6= φ for all A ∈ B implies P−1β (Vβ) ∈ B. Again if
B is a basic open set containing x in the product space (X,J ) then B = P−1β1(Vβ1) ∩
P−1β2(Vβ2) ∩ · · · ∩ P−1βn
(Vβn) for some Vβi ∈ Jβi , i = 1, 2, 3, . . . , n. We have proved that
each P−1βi(Vβi) ∈ B and hence B ∈ B. Hence whenever B is a basic open set containing
x, then B ∩ A 6= φ (A ∈ B) implies x ∈ A, for all A ∈ B implies x ∈ ∩A∈B
A 6= φ. Now
96

A ⊆ B implies ∩A∈A
A 6= φ. That is, whenever A is a collection of closed subsets of
the product space (X,J ) and further A has f.i.p then ∩A∈A
A 6= φ. This proves that
(X,J ) is a compact topological space. �
Now let us introduce the notion of a generalized sequence, known as net and
convergence of a net in a topological space.
Let (X,≤) be a partially ordered set. Further suppose for α, β ∈ X there exist
γ ∈ X such that α ≤ γ and β ≤ γ. Then we say that (X,≤) is a directed set.
(In the above case if α ≤ γ then we also say γ ≥ α.)
Definition 4.4.7. Let X be a nonempty set and (D,≤) be a directed set. Then any
function f : D → X is called a net in X. For each α ∈ D, f(α) = xα ∈ X and we
say that {xα}α∈D is a net in X.
Example 4.4.8. Let D = N and ≤ be the usual relation on N. Then (N,≤) is
a directed set. If X is a nonempty set and f : N → X then for each n ∈ N,
f(n) = xn ∈ X. Hence our net {xn}n∈N is the well known concept namely sequence
in X. In this sense we say that every sequence is a net. Now take D = [0, 1]. Then
(D,≤) is also a directed set. Define f : [0, 1]→ R as f(α) = α+ 3, ∀ α ∈ [0, 1]. Here
f = {f(α)}α∈D = {α + 3}α∈[0,1] is a net (generalized sequence) in R.
It is intuitively clear that the net {α + 3}α∈[0,1] approaches to 4. What do we
mean by saying that the net {xα}α∈D approaches to 4? Can we also say that the net
{xα}α∈D approaches 3? Well, in R consider a sequence {xn}n∈N = {xn}∞n=1. We know
that limn→∞
xn = x (ı.e xn → x as n → ∞) if and only if for each ε > 0 there exists
n0 ∈ N such that xn ∈ (x − ε, x + ε) for all n ≥ n0. Note that xn → x as n → ∞ if
and only if for each open set U containing x there exists n0 ∈ N such that xn ∈ U for
all n ≥ n0.
97

Keeping this in mind, we define:
Let (X,J ) be a topological space and {xα}α∈D be a net in X. Then we say that
the net {xα}α∈D converges to an element x ∈ X if and only if for each open set U
containing x there exists α0 ∈ D such that xα ∈ U , ∀ α ≥ α0 (that is α ∈ D with
α0 ≤ α). If {xα}α∈D converges to x then we write xα → x.
In a metric space (X, d) we know that a sequence {xn}∞n=1 in X converges to
at most one element x in X.
What about in a topological space ? Whether a net {xα}α∈D in a topological
space converges to at most one element in X. Obviously the answer is no. For
example, let X be any set containing at least two elements and J = {φ,X}. Take
x1, x2 ∈ X, x1 6= x2. Now with usual ≤, (N,≤) is a directed set.
Define f : N→ X as
f(n) =
x1 when n is odd
x2 when n is even
Here our net is {x1, x2, x1, x2, . . .} that is our net is a sequence in X. Let x = x1.
Then the only open set U containing x1 is X and hence n0 = 1 ∈ N. Then for all
n ≥ n0, xn ∈ X = U . Hence xn → x for any x ∈ X. Also nothing special about the
net {x1, x2, x1, x2, . . .}. In fact if D is a directed set and {xα}α∈D is an arbitrary net
in X then for each x ∈ X, xα → x.
Example 4.4.9. Now consider X = R and Jf , the cofinite topology on R. D = R
and ≤ is our usual relation. Then (D,≤) is a directed set. Define f : D → R as
f(α) = α for α ∈ D = R. Then {α}α∈R is a net in R. Fix an element say x ∈ R
Whether xα → x ? How to start? Start with an open set U containing x in our
98

topological space (R, J ). Now U ∈ Jf , x ∈ U (that is U 6= φ) implies U c is a finite
subset of R.
Case (i). U c = φ (⇒ U = X).
Case (ii). U c 6= φ.
That is U c is a nonempty finite subset of R. Hence there exists n0 ∈ N and
x1, x2, . . . , xn0 ∈ R = D such that U c = {α1, α2, . . . , αn0}. Now take a real number
say α0 such that α0 > αi for all i = 1, 2, . . . , n0. This α0 ∈ D is such that xα = α ∈ U
∀α ≥ α0, (α ≥ α0, α0 > αi ⇒ α > αi ⇒ α /∈ U c ⇒ α ∈ U).
Conclusion: We started with an open set U containing x and we could get an α0 ∈ D
(α0 depends on U) such that xα ∈ U , ∀α ≥ α0. Hence by our definition xα → x.
That this net {xα} = {α}α∈D converges to every element x of the given topological
space (R, J ).
(iii) D = {1, 2, . . . , p} and ≤ is our usual relation. (D,≤) is a directed set (check).
What about {xα}α∈D.HereD = {1, 2, . . . , 10} implies {xα}α∈D = {1, 2, . . . , 10}.
Now for any open set U containing 10 there exists α0 = 10 ∈ D is such that α ∈ D,
α ≥ α0 = 10 ⇒ α = 10 and xα = α = 10 ∈ U . Hence {xα}α∈D → 10.
Theorem 4.4.10. In a Hausdorff topological space (X,J ) a net {xα}α∈D in X cannot
converge to more than one element.
Proof. Suppose a net {xα}α∈D converge to say x, y ∈ X, where x 6= y. Now x 6= y,
(X, J ) is a Hausdorff topological space implies there exist open sets U, V in X such
that (i) x ∈ U, y ∈ U , (ii) U ∩ V = φ. Now xα → x, U is an open set containing x
implies
there exists α1 ∈ D such that xα ∈ U for all α ≥ α1. (4.5)
99

Also yα → y, V is an open set containing y implies
there exist α2 ∈ D such that yα ∈ V for all α ≥ α2. (4.6)
Note that D with a relation ≤ is a directed set and hence for α1, α2 ∈ D there exists
α0 ∈ D such that α0 ≥ α1 and α0 ≥ α2 (that is α1 ≤ α0 and α2 ≤ α0). Now α0 ≥ α1
implies xα0 ∈ U from Eq. (4.5) and α0 ≥ α2 implies xα0 ∈ V from Eq. (4.6). Hence
xα0 ∈ U ∩ V , a contradiction to U ∩ V = φ. We arrived at this contradiction by
assuming xα → x, xα → y and x 6= y. This means {xα}α∈D cannot converge to more
than one element. �
Note. In a Hausdorff topological space a net {xα}α∈D may not converge. If a net
converges then it converges to a unique limit. ?
Theorem 4.4.11. Let (X,J ) be a topological space and A ⊆ X. Then an element x
of X is in A if and only if there exists a net {xα}α∈D in A such that xα → x.
Proof. Let us assume that x ∈ A. Our tasks are the following: (i) using the fact
that x ∈ A construct a suitable directed set, (D,≤), (ii) and then define a net
{xα}α∈D that converges to x. Now x ∈ A implies for each open set U containing x,
U ∩ A 6= φ. (If our topology J is induced by a metric d on X then J = Jd. In this
case B(x, 1n) ∩ A 6= φ for each n ∈ N. So take xn ∈ B(x, 1
n) ∩ A. Then d(xn, x) < 1
n
and 1n→ 0 as n→∞. Hence xn → x). Take D = Nx = {U ∈ J : x ∈ U} that is Nx
is the collection of all open sets containing x. For U, V ∈ Nx, define U ≤ V if and
only if V ⊆ U (reverse set inclusion is our relation ≤). Now define f : Nx → X as
f(U) = xU ∈ U ∩ A (U ∩ A 6= φ for each U ∈ Nx implies by axiom of choice such a
function exists). Now we have a net {xU}U∈Nx .
100

Claim: xU → x.
Take an open set U0 containing x, then such an U0 ∈ Nx implies f(U0) ∈ U0∩A.
Now U ∈ Nx (our directed set) and U ≥ U0 implies U ⊆ U0 implies xU ∈ U ⊆ U0.
Now U ≥ U0 implies xU ∈ U0. Hence by definition of convergence of a net, xU → x.
Conversely, assume that there is a net say {xα}α∈D in A such that xα → x.
Now we will have to prove that x ∈ A. So start with an open set U containing x.
Hence xα → x implies
there exists α0 ∈ D such that xα ∈ U for all α ≥ α0. (4.7)
(D is a directed set means (D,≤) is a directed set). In particular when α = α0,
α ≥ α0 and therefore from Eq. (4.7), xα0 ∈ U . Also xα0 ∈ A. Hence xα0 ∈ U ∩ A.
That is for each open set U containing x, U ∩ A 6= φ. This implies x ∈ A. �
Theorem 4.4.12. Let X, Y be topological spaces and f: X→ Y . Then f is continuous
if and only if for every net {xα}α∈J converging to an element x ∈ X the net
{f(xα)}α∈J converges to f(x).
Proof. Assume that f : X → Y is a continuous function. Now let {xα}α∈J be a net
in X such that xα → x for some x ∈ X. We will have to prove that f(xα) → f(x).
Let V be an open set containing f(x) in Y . Now V is an open set containing f(x)
and f : X → Y is a continuous function implies
there exists an open set U containing x such that f(U) ⊆ V . (4.8)
Now U is an open set containing x and xα → x implies there exists an α0 ∈ J such
that xα ∈ U for all α ≥ α0. Hence from Eq. (4.8), f(xα) ∈ V for all α ≥ α0. That is,
101

for each open set V containing f(x) there exists α0 ∈ J such that f(xα) ∈ V for all
α ≥ α0. This in turn implies f(xα)→ f(x).
Now let us assume that whenever a net {xα}α∈J converges to an element x
in X then f(xα) → f(x) in Y . In this case we will have to prove that f : X → Y
continuous. We know that f is continuous if and only if f(A) ⊆ f(A) for all A ⊆ X.
(An element z of X is closer to A, that is if z ∈ A then the image f(z) is closer to
f(A).) So start with A ⊆ X and an element y ∈ f(A) (f(A) = φ ⇒ f(A) ⊆ f(A)).
Now y ∈ f(A) implies there exists x ∈ A such that y = f(x). Hence x ∈ A implies
there exists a net {xα}α∈J in A such that xα → x (refer the previous theorem) this
implies by our assumption, f(xα) → f(x). Now f(xα) ∈ f(A) and f(xα) → f(x)
implies f(x) ∈ f(A) (again refer the previous theorem). So we have proved that
f(A) ⊆ f(A) whenever A ⊆ X. This implies f : X → Y is a continuous function. �
Alternate proof of theorem 4.4.12.
Proof. Assume that whenever a net {xα}α∈J converges to an element x ∈ X then
f(xα)→ f(x) in Y. Now suppose f is not continuous at x. Then there exists an open
set V containing x such that f(U) * V for every U ∈ Nx. Then for each U ∈ Nx
there exists xU ∈ U such that f(xU) /∈ V. Now observe (refer the proof of the theorem
4.4.11) that the net {xU}U∈Nx such that xU → x in X but f(xU) 9 f(x) in Y. �
Now let us define a concept which generalize the concept of a subsequence.
Recall that if X is a nonempty set {xn}∞n=1 = (xn)n∈N is a sequence in X if and only
if there exists a function f : N → X satisfying the condition that f(xn) = xn. Here
we have a net {xα}α∈J in X. Hence in place of N we have a directed set (J,≤) and
a function f : J → X satisfying the condition that f(α) = xα for all α ∈ J .
102
What do we mean by saying that {xnk}∞k=1 is a subsequence of {xn}? We have
a subset {nk}∞k=1 of natural numbers satisfying n1 < n2 < · · · < nk < nk+1 < · · · .
Let D = {nk : k ∈ N} and we have f : N → X such that f(n) = xn for all n ∈ N.
That is essentially f : N → X is sequence in X. Now we have another function say
g : D → N satisfying (i) g(k) = nk, (ii) n1 < n2 < · · · < nk < nk+1 < · · · that is
k < l ⇒ nk < nl that is k < l ⇒ g(k) < g(l). Also note that for each n0 ∈ N there
exists k0 ∈ N such that f(k0) = nk0 > n0. So keeping this motivation in mind we
define the concept of subnet of a given net in X. It is given that f : J → X is a net
in X ( so it is understood that (J,≤) is a directed set). Suppose D with a relation
≤ is a directed set (need not be the same relation as given in J . But for the sake
of simplicity we use same notation ≤ for both sets). Suppose g : D → J such that
i, j ∈ D, i ≤ j implies g(i) ≤ g(j) and for each α ∈ J there exists γ ∈ D such that
g(γ) ≥ α (this is like saying that, when J = N = D, for each n0 ∈ N there exists
k ∈ N such that g(k) = nk ≥ n0). In such a case f ◦ g : D → X is called subnet of
X. ((f ◦ g)(k) = f(g(k)) = f(nk) = xnk).
Definition 4.4.13. Let (X, J ) be a topological space and {xα}α∈J = (xα)α∈J be a
net in X. An element x ∈ X is said to be an accumulation point of the given net
(xα)α∈J if and only if for each open set U containing x, the set KU = {α ∈ J : xα ∈ U}
is cofinal in J . Now KU is cofinal in J means for each α ∈ J there exists β ∈ KU
such that β ≥ α (it is like saying that k →∞ implies nk →∞).
Now let us prove:
Theorem 4.4.14. Let (xα)α∈J be a net in a topological space. Then a point x in X
is an accumulation point of the given net (xα)α∈J if and only if (xα)α∈J has a subnet
and that subnet converges to x.
103

Proof. ⇒ Assume that x is an accumulation point of (xα)α∈J . By the definition of
accumulation point of a net we have for each open set U containing x
KU = {α ∈ J : xα ∈ U} is cofinal in J . (4.9)
Let K = {(α, U) ∈ J × Nx : xα ∈ U}, where Nx is the collection of all open sets
containing x. From Eq. (4.9), KU 6= φ. (Fix α ∈ J . Now KU is cofinal in J implies
there exists β ∈ KU such that β ≥ α.) For (α, U), (β, V ) ∈ K define (α, U) ≤ (β, V )
if and only if α ≤ β and V ⊆ U (reverse set inclusion). It is easy to see that (K,≤)
is a directed set. It is given that (xα)α∈J is a net in X. Hence (J,≤) is a directed set
and f : J → X is such that f(α) = xα. Now define g : K → J as g(α, U) = α (refer
Eq. (4.9)).
Claim: g(K) is cofinal in J .
So take α ∈ J . Now KU is cofinal in J (refer Eq. (4.9)) there exists β ∈ KU
such that β ≥ α. Now β ∈ KU implies xβ ∈ U that is (β, U) ∈ K is such that
g(β, U) = β ≥ α implies g(K) is cofinal in J . Also (α, U), (β, V ) ∈ K, (α, U) ≤ (β, V )
implies g(α, U) = α ≤ β = g(β, V ). Hence f ◦ g : K → X is a subnet of f (or say
f(α) = (xα)). Now let us prove that this subnet converges to x. So take an open set
U containing x. This implies KU is cofinal in J . Fix (α0, U) ∈ K. Now α0 ∈ J , KU
is cofinal in J implies β0 ∈ KU such that β0 ≥ α0. Hence (α, V ) ∈ K, (α, V ) ≥
(α0, U) implies (f ◦ g)(α, V ) = f(α) = xα ∈ V ⊆ U . That is for each open set U
containing x there exists (α0, U) ∈ K such that (α, V ) ∈ K (α, V ) ≥ (α0, U) implies
(f ◦ g)(α, V ) ∈ U . This proves that f ◦ g → x.
Conversely, suppose there is a subnet of (f(α))α∈J = (xα)α∈J which converge
to an element x ∈ X. A subnet of f converges to x means there exists a directed set
104

say (K,≤) and a function say g : K → J such that i, j ∈ K, i ≤ j implies g(i) ≤ g(j),
g(K) is cofinal in J , and (f ◦ g)(i) = f(g(i)) → x. Now let us prove that x is an
accumulation point of the net f . So take an open set U containing x.
Claim: {α ∈ J : f(α) = xα ∈ U} is cofinal in J.
Let α0 ∈ J . Now f ◦ g : K → X is a subnet such that f ◦ g → x. Hence for
this given α0 ∈ J there exists β ∈ K such that g(β) ≥ α0 (note g(K) is cofinal in J).
Now f ◦ g → x, U is an open set containing x implies there exists β0 ∈ K such that
α ∈ K,α ≥ β0 ⇒ f(g(α)) ∈ U , β ∈ J is such that g(β) ≥ α0. Take γ0 ∈ K such that
α0 ≥ β, β0. Then (f ◦ g)(γ0) ∈ U and g(γ0) ≥ g(β) ≥ α0. That is for α0 ∈ J , there
exists g(γ0) ∈ J such that f(g(γ0)) ∈ U implies {α ∈ J : f(α) = xα ∈ U} is cofinal
in J . Hence x is an accumulation point. �
Recall that a metric space (X, d) is a compact metric space if and only if every
sequence {xn}∞n=1 in X has a subsequence {xnk}∞k=1 that converges to an element
in X. It is to be noted that this result is not true for an arbitrary topological space.
For a topological space we have the following theorem.
Theorem 4.4.15. A topological space (X,J ) is compact if and only if every net in
X has a subnet that converges to an element in X.
Proof. Assume that (X,J ) is a compact topological space and f : J → X is a net
in X. We will have to prove that f has a subnet that converges to an element in X.
So it is enough to prove that f has an accumulation point.
For each α ∈ J , let Aα = {xβ : α ≤ β} (note: f : J → X is a net means with
respect to a relation ≤, (J,≤) is directed set). Now {Aα}α∈J is a collection of sets
which has finite intersection property. For Aα1 , Aα2 , . . . , Aαkif we take α ∈ J such
105

that α ≥ αj for all j = 1, 2, . . . , k, that is αj ≤ α, then xα ∈ Aαj, ∀ j = 1, 2, . . . , k and
hence x ∈k∩j=1
Aαj. Now (X,J ) is a compact topological space {Aα}α∈J is a collection
of closed subsets of X which has finite intersection property implies ∩α∈J
Aαj6= φ. Let
x ∈ ∩α∈J
Aαj.
Now we aim to prove that x is an accumulation point of f . So, start with an
open set U containing x, and we will have to prove that {α ∈ J : xα ∈ U} is cofinal
in J . Take α0 ∈ J . Now U is an open set containing x, x ∈ Aα0 implies U ∩Aα0 6= φ.
Hence there exists α ≥ α0 such that xα ∈ U . This proves that {α ∈ J : xα ∈ U} is
cofinal in J . Hence we have proved that x is an accumulation point of the stated net
f . This implies there exists a subnet of f which converges to f .
To prove the converse part let us assume that every net in X has convergent
subnet in X. By assuming this, we aim to prove that (X,J ) is a compact topological
space.
To prove that (X,J ) is a compact topological space, let us prove: if A is a collection
of closed subsets of X which has finite intersection property then ∩A∈A
A 6= φ. So, we
have a collection A of closed subsets of X which has finite intersection property.
Let B = {A ⊆ X : A = A1∩A2∩· · ·∩Ak, k ∈ N, A1, . . . , Ak ∈ A}. That is B is
the collection of finite intersection of members of A. (Note. ∩A∈φ
A = X and hence we
do not require to consider this case.) For A,B ∈ B define A ≤ B, whenever B ⊆ A.
Then (B,≤) is a directed set. Now define f : B → X as f(A) = f(A1∩A2∩· · ·∩Ak) =
xA, where xA ∈ A1 ∩ A2 ∩ · · · ∩ Ak is fixed (A1 ∩ A2 ∩ · · · ∩ Ak) may contains more
than one element and in that case first take any one element form A1 ∩A2 ∩ · · · ∩Ak.
Hence f = (f(A))A∈B is a net in X. By our assumption this net f will have a subnet
106

that will converge to an element say x in X. So there will exists a directed set K and
a function g : K → B satisfying f ◦ g is a subnet of f and f ◦ g converges to x.
Now we claim that x ∈ A for each A ∈ A. Suppose for some A ∈ A, x /∈ A.
Then x ∈ Ac = U , an open set. Since f◦g → x and U is an open set containing x there
exists α0 ∈ K such that (f ◦ g)(α) ∈ U for all α ≥ α0. Now α0 ∈ K implies g(α0) ∈ B
implies there exists k ∈ N and A1, A2, . . . , Ak ∈ A such that g(α0) = A1∩A2∩· · ·∩Ak.
A1 ∩A2 ∩ · · · ∩Ak ∈ B is such that A1 ∩A2 ∩ · · · ∩Ak ≥ g(α0). We have f ◦ g(α0) =
f(g(α0)) ∈ U = Ac. Now K is a directed set and g(K) is cofinal in B implies there
exists α ∈ K such that (i) α ≥ α0, (ii) g(α) ≥ A1∩A2∩· · ·∩Ak. Now α ≥ α0 implies
(f◦g)(α) ∈ U = Ac but by the definition of f, f(g(α)) ∈ g(α) ⊆ A1∩A2∩· · ·∩Ak ⊆ A.
So we get a contradiction. Therefore x /∈ A for some A ∈ A cannot happen. We have
proved that if A is a collection of closed subsets of X which has finite intersection
property then ∩A∈A
A 6= φ. Hence (X,J ) is a compact topological space. �
Definition 4.4.16. A topological property is any property so that if (X,J ), (Y,J ′)
are topological spaces and f : (X,J )→ (Y,J ′) is a homeomorphism (that is (X,J )
is homeomorphic to (Y,J ′)) then (X,J ) has the property if and only if (Y,J ′) has
the same property.
Example 4.4.17. Compactness, connectedness, local compactness are all topological
properties.
107

Exercises.
1. Let a, b ∈ R, a < b and A be a collection of open sets in R such that [a, b] ⊆
∪A∈A
A, C = {x ∈ [a, b] : [a, x] is covered by finitely many members of A}. Now
C is a nonemty bounded subset of R implies by LUB axiom z = supC = lubC
exists. Prove that z = b and b ∈ C.
2. Let (X, J ) be a locally compact Hausdorff space. Further assume that (X, J )
is not a compact space. Suppose there exists a compact Hausdorff space
(Y , J ′) such that (i) Y KX is a single point, and (ii) X = Y. Then there exists
a homeomorphism f : (X?, J ?) → (Y , J ) such that f(x) = x for all x ∈ X,
where (X?, J ?) is the one point compactification of (X, J ).
3. Let (X,J ) be a Hausdorff topological space. Further suppose every subset A
of X is compact. Then prove that every subset of X is open.
4. Say true or false (justify your answer)
• A = {(n,m) : 1 ≤ n,m ≤ 100} is a compact subset of R2.
• Let X = R and Jc be the co-countable topology on R. Then every
countable subset of (R,Jc) is compact.
• A = {0, 1, 12, 13, · · · } is a compact subset of R.
5. Is it true that continuous image of a locally compact space is locally compact?
Justify your answer.
6. Let A1, A2, . . . , An(n ∈ N) be compact subsets of a topological space (X,J )
then prove thatn∪i=1
Ai is compact.
7. Is it true that {An}∞n=1 are compact subsets of a topological space then∞∪n=1
An
is also compact set? Justify your answer.
108

8. Prove or disprove: Let {An}∞n=1 be a collection of compact sets such that
An ⊆ An+1 for all n ∈ N. Then∞∪n=1
An is also a compact set.
9. Prove that A = [−1, 0] ∪ {1, 12, 13, · · · } is a compact subset of R.
10. Is A = {x = (x1, x2, . . . , xn) ∈ Rn : |xk| ≤ 1k, k = 1, 2, . . . , n} a compact subset
of Rn? Justify your answer (for x = (x1, x2, . . . , xn), y = (y1, y2, . . . , yn) ∈ Rn,
let d1(x, y) = |x1 − y1|+ · · ·+ |xn − yn| then (Rn, d1) is a metric space).
11. Prove that a subset A of R is compact if and only if every countable collection
of open sets which covers A has a finite subcollection which also covers A.
12. Can there exist a continuous one-one function from [a, b] onto [a, b] × [c, d],
where a, b, c, d ∈ R, a < b, c < d.
13. Is the intersection of finite number of compact subsets of a topological space
compact? Justify your answer.
14. Can there exist a homeomorphism between (0, 1) and [0,1]? Justify your answer.
15. Let Jf be the cofinite topology on R.
(i) For each x ∈ R, prove that { 1n}n∈N converges to x in (R,Jf ).
(ii) Is {1, 0, 2, 0, 3, 0, 4, 0, 5, 0, . . .} converges to 0 in (R,Jf )? Justify your answer.
16. For each n ∈ N, let Xn = {0, 1}, Jn = {φ, {0}, {1}, Xn}, J - product topology
on X = Πn∈N
Xn =∞Πn=1
Xn and Jb - box topology on X. Is (X,J ) a compact
space? Is (X,Jb) a compact space? Justify your answer.
109

110

Chapter 5
Countability and Separation Axioms
5.1 First and Second Countable Topological Spaces
Definition 5.1.1. A topological space (X, J ) is said to have a countable local
basis (or countable basis) at a point x ∈ X if there exists a countable collection say
Bx of open sets containing x such that for each open set U containing x there exists
V ∈ Bx with V ⊆ U .
Definition 5.1.2. A topological space (X, J ) is said to be first countable or said
to satisfy the first countability axiom if for each x ∈ X there exists a countable local
base at x.
Examples 5.1.3. (i) Let (X, d) be a metric space then for each x ∈ X,
Bx = {B(x, 1n) : n ∈ N} is a countable local basis at x. Hence (X, Jd) is a first
countable space. So, we say that every metric space (X, d) is a first countable space.
(ii) Let X = N and J = {φ,X, {1}, {1, 2}, . . . , {1, 2, . . . , n}, . . . , } then obviously
(X,J ) is a first countable topological space.
Note that this is not an interesting example of a first countable topological
space. Once the topology J is a countable collection then (X, J ) is a first countable
space.
Example 5.1.4. Let X = R and Jl be the lower limit topology on R generated by
{[a, b) : a, b ∈ R, a < b}. For each x ∈ X, Bx = {[x, x + 1n) : n ∈ N} is a countable
111

local base at x. Hence (R, Jl) = Rl is a first countable topological space. Now let us
see a stronger version of first countable topological space.
Definition 5.1.5. If a topological space (X, J ) has a countable basis B then we
say that (X, J ) is a second countable topological space or it satisfies the second
countability axiom.
Exercise 5.1.6. Though it is trivial from the definition, prove that every second
countable topological space (X, J ) is a first countable topological space. 2
What about the converse?
Let X be any uncountable set and JD be the discrete topology on X. Then
(X, JD) is first countable, but it is not second countable. In fact, for each x ∈ X,
Bx = {{x}} is a countable local base at x. Take any open set U containing x then
there exists V = {x} ∈ Bx such that x ∈ V ⊆ U . Hence Bx is a local base at x.
How to prove that (X, J ) is not a second countable topological space ? Well
we use the method of proof by contradiction.
Suppose there exists a countable basis say B = {B1, B2, . . . , } for (X, J ). Let
us assume that each Bk 6= φ. For each k ∈ N, let xk ∈ Bk. Since X is an uncountable
set we can select an x ∈ X such that x 6= xk for all k ∈ N. Now {x}, the singleton set
containing x, is an open set and B is a basis for (X, J ) implies there exists k ∈ N
such that x ∈ Bk ⊆ {x} this implies Bk = {x}. But xk ∈ Bk implies x = xk, a
contradiction to our assumption that x ∈ X such that x 6= xk for all k ∈ N. Hence if
X is an uncountable set then the discrete topological space (X, JD) is first countable
but not second countable.
Also we have seen that the lower limit topological space Rl is first countable.
Now let us prove that Rl = (R, Jl) is not a second countable topological space. That
112

is we will have to prove that if B is a basis for (R, Jl) then B is not a countable
collection. So, fix a basis say B for (R, Jl). For each x ∈ R, [x, x + 1) ∈ Jl. Hence
B is a basis for (R, Jl) implies there exists Bx ∈ B such that x ∈ Bx ⊆ [x, x+ 1).
x y x +1 y +1
Figure 5.1
For x, y ∈ R, x 6= y we have [x, x + 1) 6= [y, y + 1). Also Bx ⊆ [x, x + 1) implies
inf Bx ≥ inf[x, x + 1) = x. Also x ∈ Bx implies x ≥ inf Bx. Hence x = inf Bx. Now
define f : R → B as f(x) = Bx. Then x 6= y implies Bx 6= By. (Bx = By implies
inf Bx = inf By) That is f(x) 6= f(y). Hence f is an one-one function. This implies
that f : R → f(R) ⊆ B is a bijective function. Therefore f(R) is an uncountable
set and hence B is an uncountable set. We have proved that if B is a basis for
(R, Jl) then B is an uncountable set. Hence (R, Jl) cannot have a countable basis
and therefore (R, Jl) is not a second countable topological space.
It is a simple exercise to check Q = R in (R, Jl). That is Q is a countable
dense subset of R with respect to (R, Jl). Such a topological space is known as a
separable topological space.
Definition 5.1.7. A topological space (X, J ) is said to be a separable topological
space if there exists a countable subset say A of X such that A = X.
Definition 5.1.8. A topological space (X,J ) is said to be a Lindelof space if for any
collection A of open sets such that X = ∪A∈A
A, there exists a countable subcollection
113

say B ⊆ A such that X = ∪B∈B
B. That is, a topological space (X,J ) is said to be a
Lindelof space if and only if every open cover of X has a countable subcover for X.
By definition every compact topological space (X,J ) is a Lindelof space. But
the converse need not be true. It is easy to prove that R (R with usual topology) is
a Lindelof space. But R is not compact space.
Now let us prove that every second countable topological space is a Lindelof
space.
Theorem 5.1.9. If (X,J ) is a second countable topological space then (X,J ) is a
Lindelof space.
Proof. Let B = {B1, B2, B3, . . .} be a countable basis for (X,J ) and A be an open
cover for X. Let us assume that, X 6= φ, A 6= φ for each A ∈ A and B 6= φ, for each
B ∈ B. Fix A ∈ A and x ∈ A. Now x ∈ A, A is an open set implies there exists
B ∈ B such that
x ∈ B ⊆ A. (5.1)
For each n ∈ N, let Fn = {A ∈ A : Bn ⊆ A}. Here it is possible that Fn = φ, for
some n ∈ N. At the same time note that, from Eq. (5.1), {n ∈ N: Fn 6= φ} is a
nonempty set. Let {n ∈ N: Fn 6= φ} = {n1, n2, . . . , nk . . . , } (it may be a finite set)
and for each such k take Ank∈ Fnk
. This will give us Bnk⊆ Ank
∈ A.
Let us prove that∞∪k=1
Ank= X. So, let x ∈ X. Now A is an open cover for X
implies x ∈ A for some A. Now x ∈ A, B is a basis for (X,J ) implies there exists
k ∈ N such that x ∈ Bnk⊆ A. This implies that A ∈ Fnk
. Also Ank∈ Fnk
. Hence by
our definition of Fnk, Bnk
⊆ Ank. Hence x ∈ X implies x ∈ Ank
, for some k ∈ N.
114

This implies that X ⊆∞∪k=1
Ank. That is {Ank
}∞k=1 is a countable subcover for
A. Therefore every open cover A of X has a countable subcover. Hence (X,J ) is a
Lindelof space. �
Note. Recall that, for 1 ≤ p < ∞, lp = {x = (xn)∞n=1 :∞∑n=1
|xn|p < ∞} is a second
countable metric space, where for x = (xn) ∈ lp, y = (yn) ∈ lp,
dp((xn), (yn)) = dp(x, y) =
( ∞∑n=1
|xn − yn|p)1p
.
Also note that Rn = {x = (x1, x2, . . . , xn) : xi ∈ R, i = 1, 2, . . . , n} is a second
countable metric space with respect to any of the metric given by dp(x, y) =(∞∑n=1
|xn−yn|p)1p
for x = (x1, x2, . . . , xn) ∈ Rn, y = (y1, y2, . . . , yn) ∈ Rn, 1 ≤ p <∞
or d∞(x, y) = max{|xk − yk| : k = 1, 2, . . . , n}. So, all the above mentioned metric
spaces are all Lindelof spaces. But none of these metric spaces is a compact space. ?
Now let us prove that a second countable topological space is a separable space.
Theorem 5.1.10. Every second countable topological space (X,J ) is a separable
space.
Proof. Given that (X,J ) is a second countable topological space. Hence there
exists a countable basis say B = {B1, B2, . . .} for (X,J ). When we write
B = {B1, B2, . . . , }, it does not mean that B is a countably infinite set. It
means that either for some n ∈ N, B = {B1, B2, . . . , Bn} or B = φ or B is a
countably infinite set. If X 6= φ then B 6= φ. If for some k ∈ N, Bk = φ, then
B′ = {B1, B2, . . . , Bk−1, Bk+1, . . . , } is also a basis for (X,J ).
So, let us assume that each Bn 6= φ for all n. Since Bn 6= φ, for each n ∈ N, let
xn ∈ Bn (note that by axiom of choice there exists a function f : N →∞∪n=1
Bn such
115
that xn = f(n) ∈ Bn) and A = {x1, x2, x3 . . . , }. Here also it is quite possible that
A is a finite set. Now let us prove that A = X. So, take an x ∈ X and an open set
U containing x. Now B is a basis for (X,J ), U is an open set containing x implies
there exists Bn ∈ B such that x ∈ Bn and Bn ⊆ U . Also xn ∈ Bn. Hence xn ∈ U ∩A.
This gives that U ∩A 6= φ. That is we have proved that U ∩A 6= φ for each open set
U containing x. Hence x ∈ A. That is x ∈ X and hence x ∈ A and hence A = X.
Therefore (X,J ) has a countable dense subset and therefore (X,J ) is a separable
space. �
Now let us prove that subspace of a separable metric space is separable.
Theorem 5.1.11. Let (X, d) be a separable metric space and Y be a subspace of X
(that is Y ⊆ X, and for x, y ∈ Y , dY (x, y) = d(x, y)). Then (Y, dY ) is a separable
space.
Proof. (X, d) is a separable metric space implies there exists a countable subset
say A = {x1, x2, x3 . . . , } of X such that A = X (here A denotes the closure of A
with respect to (X, d)). We will have to find a countable subset say B of Y such
that BY = Y (here BY = B ∩ Y , the closure of B with respect to the subspace
(Y, dY )). For n ∈ N, let An,k = B(xn,1k)∩Y . Here we do not know whether An,k = φ
or An,k 6= φ. If An,k 6= φ (n, k ∈ N) let an,k ∈ An,k be a fixed element. Then
B = {an,k : an,k ∈ An,k whenever An,k 6= φ} is a countable subset of Y . Now let us
prove that BY = B ∩ Y = Y. So let x ∈ Y and U be an open set in X containing
x. Hence there exists k ∈ N such that B(x, 1k) ⊆ U. Again x ∈ A = X implies
B(x, 12k
) ∩ A 6= φ. Then there exists xn ∈ A such that xn ∈ B(x, 12k
). Therefore
x ∈ B(xn,12k
) ∩ Y = An,2k. Hence An,2k 6= φ. Now An,2k 6= φ implies an,2k ∈ B.
Further an,2k ∈ B(xn,12k
). Now d(x, an,2k) ≤ d(x, xn) + d(xn, an,2k) <12k
+ 12k
= 1k.
116

Hence an,2k ∈ B(x, 1k)∩B ⊆ U ∩B. That is U ∩B 6= φ for each open set U containing
x. This implies x ∈ B. Also x ∈ Y . Therefore x ∈ B ∩ Y = BY . This implies
Y ⊆ BY ⊆ Y and hence BY = Y . That is B is a countable dense subset of Y. This
proves that the subspace (Y, dY ) is a separable metric space. �
Subspace of a separable topological space need not be separable.
We give an example to show that subspace of a separable topological space
need not be separable.
Let X = {(x, y) : x ∈ R, y ≥ 0}. Basic open sets are of the type:
(i) for (x, y) ∈ R2, x ∈ R, y > 0 basic open sets containing (x, y) are of the form
B((x, y), r), 0 < r < y, and (ii) for (x, 0) ∈ R2, x ∈ R, basic open sets are of the form
(B(x, 0), r) ∩ X)K{(y, 0) : 0 < |y − x| < r}, r > 0. Here B((x, y), r) = {(a, b) ∈ R2
: d((x, y), (a, b)) =√
(x− a)2 + (y − b)2 < r}, the open ball centered at (x, y) and
radius r with respect to the Euclidean metric d on R2.
It is easy to see that the above collection of sets will form a basis for a topology
on X.
Let J be the topology on X induced by the collection of basic open sets
described as above and if A = {(x, y) : x, y ∈ Q, y ≥ 0} then A is a countable
subcollection of X such that A = X. That is A is a countable dense subset of X, and
hence (X,J ) is a separable topological space.
Now for Y = {(x, 0) : x ∈ R} (an uncountable set), JY = P(Y ). That is the
subspace (Y, JY ) of (X,J ) is the discrete topological space. That is every subset U
of Y is both open and closed in (Y,JY ). Therefore if B is a countable subset of Y
then B = B 6= Y here (B = BJY , the is closure of B in (Y,JY )). This proves that
(Y,JY ) is not a separable subspace, though (X,J ) is a separable topological space.
117

Note that we have already proved that every second countable topological
space is separable.
Exercise 5.1.12. Prove that every separable metric space is second countable. 2
Exercise 5.1.13. Prove that Rn = {(x1, x2, . . . , xn) : xi ∈ R, i = 1, 2, . . . , n} is
a separable metric space for 1 ≤ p < ∞, dp(x, y) =
(n∑i=1
|xi − yi|p) 1
p
,
x = (x1, x2, . . . , xn) ∈ Rn, y = (y1, y2, . . . , yn) ∈ Rn and d∞(x, y) = max{|xi− yi| :
1 ≤ i ≤ n}. 2
It is easy to prove that if J2 is the topology induced by d2 then Jp = J2,
∀ p ≥ 1. That is all these metrics dp, 1 ≤ p ≤ ∞ will induce the same topology on
Rn. So if we want to prove that (Rn, dp) is a separable metric space, it is enough to
prove that (Rn,J1) (or say (Rn,J2)) is separable.
For 1 ≤ p <∞, let lp = {x = (xn) : xn ∈ R for all n and∞∑n=1
|xn|p <∞}. If we define,
dp(x, y) =
(∞∑n=1
|xn − yn|p) 1
p
, then dp is a metric on lp. Now let us see how to prove
that (lp, dp) is a separable metric space.
Step 1: For each n ∈ N, let An = {(r1, r2, . . . , rn, . . . , 0, 0, . . .) : ri ∈ Q,
i = 1, 2, . . . , n}.
If we define f : Q × Q × · · · × Q (n times) = Qn → An as f(r1, r2, . . . , rn) =
(r1, r2, . . . , rn, . . . , 0, 0, . . .). Then f is a bijective function. Now Q is a countable set
implies Q×Q× · · · ×Q (finite product of countable sets is countable) is countable.
Hence there is a bijection between Qn and An implies An is a countable set. Now
each An is a countable set implies∞∪n=1
An is also countable.
We leave it as an exercise to prove that∞∪n=1
An = lp. That is∞∪n=1
An is a
countable dense subset of lp. Hence (lp, dp) is a separable metric space. These spaces
118
are important examples of Banach spaces. If l∞ = {x = (xn) : (xn) is a bounded
real sequence } and d∞(x, y) = sup{|xn − yn| : n ≥ 1}, then (l∞, d∞) is also a metric
space. Let X = {x = (xn) : xn = 0 or xn = 1}. For x, y ∈ X, x 6= y, d(x, y) = 1.
Hence (X, d∞) (that is d∞ is restricted to the subspace X of l∞) is a metric space.
Now the topology J on X induced by the metric d∞ is the discrete topology on X. In
this topological space (X,J ) every subset A of X is both open and closed. Therefore,
if A is a countable subset of X, then A = A 6= X, (note that X is an uncountable
subset of X). Now the subspace X of l∞ is not a separable space implies l∞ is not a
separable space.
5.2 Properties of First Countable Topological Spaces
Theorem 5.2.1. If (X, J ) is a first countable topological space then for each x ∈ X
there exists a countable local base say {Vn(x)}∞n=1 such that Vn+1(x) ⊆ Vn(x).
Proof. Fix x ∈ X. Now (X, J ) is a first countable topological space implies there
exists a countable local base say {Un}∞n=1 at x. Let Vn(x) = U1 ∩ U2 ∩ · · · ∩ Un then
{Vn(x)}∞n=1 is a collection of open sets such that Vn+1(x) ⊆ Vn(x) for all n ∈ N. So,
it is enough to prove that {Vn(x)}∞n=1 is a local base at x. So start with an open set
V containing x. Now {Un}∞n=1 is a local base at x and V is an open set containing x
implies there exists n0 ∈ N such that Un0 ⊆ V . By the definition of Vn(x)′s we have
Vn0(x) ⊆ Un0 . Hence we have the following: for each open set V containing x there
exists n0 ∈ N such that Vn0(x) ⊆ V . This implies that {Vn(x)} is a local base at x
satisfying Vn+1(x) ⊆ Vn(x) for all n ∈ N. �
Let us use the above characterization of a first countable base to show that,
in some sense, first countable topological spaces behave like metric spaces.
119

Theorem 5.2.2. Let (X, J ) be a first countable topological space and A be a
nonempty subset of X. Then for each x ∈ X, x ∈ A if and only if there exists a
sequence {xn}∞n=1 in A such that xn → x as n→∞.
Proof. First let us assume that x ∈ A. Now (X, J ) is a first countable topological
space implies there exists a countable local base say B = {Vn}∞n=1 such that Vn+1 ⊆ Vn,
for all n ∈ N. Hence x ∈ A implies A ∩ Vn 6= φ, for each n ∈ N. Let xn ∈ A ∩ Vn.
Claim: xn → x as n→∞.
So start with an open set U containing x (enough to start with Vn) then there exists
n0 ∈ N such that x ∈ Vn0 ⊆ U . Hence xn ∈ Vn ⊆ Vn0 ⊆ U for all n ≥ n0. That is
xn ∈ U for all n ≥ n0. This means xn → x as n→∞.
Conversely, suppose there exists a sequence {xn}∞n=1 in A such that xn → x.
Then for each open set U containing x there exists a positive integer n0 such that
xn ∈ U for all n ≥ n0. In particular xn0 ∈ U ∩ A. Hence for each open set U
containing x, U ∩ A 6= φ and this implies x ∈ A. �
Theorem 5.2.3. Let X and Y be topological spaces and further suppose X is a first
countable topological space. Then a function f : X → Y is continuous at a point
x ∈ X if and only if for every sequence {xn}∞n=1 in X, xn → x as n → ∞, then the
sequence {f(xn)}∞n=1 converges to f(x) in Y.
Proof. Assume that f : X → Y is continuous at a point x ∈ X. Also assume that
{xn}∞n=1 is a sequence in X such that xn → x as n→∞.
To prove: f(xn)→ f(x) in Y .
So start with an open set V in Y containing f(x). Since f is continuous at x,
U = f−1(V ) is an open set in X. Now f(x) ∈ V implies x ∈ f−1(V ) = U . That is
120

U is an open set containing x. Hence xn → x implies there exists n0 ∈ N such that
xn ∈ U for all n ≥ n0 . This implies f(xn) ∈ V for all n ≥ n0. That is, whenever
xn → x as n→∞ then f(xn)→ f(x) as n→∞.
Conversely, suppose that {xn} is a sequence in X, xn → x as n→∞ implies
f(xn) → f(x). Now we will have to prove that f is continuous at x. It is to be
noted that to prove this converse part we will make use of the fact that X is a first
countable space. Now X is a first countable space implies there exists a local base
{Vn}∞n=1 at x such that Vn+1 ⊆ Vn for all n ∈ N. We will use the method of proof
by contradiction. If f is not continuous at x then there should exist an open set W
containing f(x) such that f(U) * W for any open set U containing x. In particular
for such an open set W , f(Vn) * W for all n = 1, 2, 3, . . .. Hence there exists xn ∈ Vn
such that f(xn) /∈ W .
Claim: xn → x as →∞. So start with an open set V in X containing x.
Now {Vn}∞n=1 is a local base at x implies there exists n0 ∈ N such that Vn0 ⊆ V .
Hence xn ∈ Vn ⊆ Vn0 ⊆ V for all n ≥ n0. That is for each open set V containing x
there exists n0 ∈ N such that xn ∈ V for all n ≥ n0. Hence xn → x as n → ∞. But
this sequence {xn} in X is such that f(xn) /∈ W , where W is an open set containing
f(x). So we have arrived at a contradiction to our assumption namely xn ∈ X,
xn → x ∈ X implies f(xn) → f(x). We arrived at this contradiction by assuming f
is not continuous at x. Therefore our assumption is wrong and hence f is continuous
at x. �
Example 5.2.4. Let Jc = {A ⊆ R : Ac is countable or Ac = R}, the co-countable
topology on R, and X = (R,Jc), Y = (R,Js), where Js is the standard topology
on R. Define f : X → Y as f(x) = x for all x ∈ X. Suppose {xn} is a sequence
121

in X such that {xn} converges to x ∈ X = R. Then it is easy to prove that there
exists n0 ∈ N such that xn = x for all n ≥ n0. (If this statement is not true then
there exists a subsequence {xnk}∞k=1 of {xn}∞n=1 such that xnk
6= x for all k ∈ N. Then
U = RK{xnk: k ∈ N} is an open set in X containing x. Hence {xn} converges to x
in X implies there exists n0 ∈ N such that xn ∈ U for all n ≥ n0. In particular for
k ≥ n0, nk ≥ k ≥ n0 and this implies xnk∈ U .) So we have the following: xn → x in
X implies f(xn)→ f(x) in Y. But the given function f : X → Y is not a continuous
function (note: f−1(0, 1) = (0, 1) is not an open set in (R,Jc)). This example does
not give any contradiction to theorem 5.2.3. From this example we conclude that
X = (R,Jc) is not a first countable topological space.
5.3 Regular and Normal Topological Spaces
Definition 5.3.1. A topological space (X, J ) is called a T1 space if for each x ∈ X,
the singleton set {x} is a closed set in (X, J ).
Definition 5.3.2. A T1-topological space (X, J ) is called a regular space if for
each x ∈ X and for each closed subset A of X with x /∈ A, there exist open sets U ,
V in X satisfying the following:
(i) x ∈ U,A ⊆ V , (ii) U ∩ V = φ.
Result 5.3.3. Every regular topological space (X, J ) is a Hausdorff space.
Proof. Let x, y ∈ X, x 6= y. By definition every regular space is a T1-space. Hence
{y} is a closed set. Also x 6= y implies x /∈ A = {y}. Now {y} is a closed set which
does not contain x. Since (X, J ) is a regular space, there exist open sets U, V in X
satisfying the following:
(i) x ∈ U,A = {y} ⊆ V ,
122

(ii) U ∩V = φ that is U, V are open sets in X such that x ∈ U, y ∈ V and U ∩V = φ.
Hence (X, J ) is a Hausdorff topological space. �
Exercise 5.3.4. Prove that every Hausdorff space is a T1-space. 2
Example 5.3.5. Let X be an infinite set and Jf be the cofinite topology on X.
Then (X, Jf ) is a T1-space, but (X, Jf ) is not a Hausdorff space. For each x ∈ X,
U = XK{x} is an open set. Hence U c = XKU = {x} is a closed set in X. That is
for each x ∈ X, the singleton set {x} is a closed set. Therefore (X, J ) is a T1 -
space. Take any x, y ∈ X, x 6= y. Suppose there exist open sets U , V in X such that
x ∈ U, y ∈ V and U ∩ V = φ. Now U, V are nonempty open subsets of the cofinite
topological space (X, Jf ) implies U c, V c are finite sets. Hence X = φc = (U ∩ V )c =
U c ∪ V c is a finite set. Therefore there cannot exist any open sets U, V in (X, Jf )
satisfying x ∈ U, y ∈ V and U ∩V = φ. This means (X, Jf ) is not a Hausdorff space.
Now let us give an example of a topological space which is Hausdorff but not
regular. Take X = R and BK = {(a, b), (a, b)KK : a, b ∈ R, a < b}, where
K = {1, 12, 13, . . .}. Now it is easy to prove that (left as an exercise) BK is a basis for
a topology on R. Let JK be the topology on R generated by BK . If J is the usual
topology on R then we know that J is generated by B = {(a, b) : a, b ∈ R, a < b}.
Since we have B ⊆ BK and this implies that J = JB ⊆ JBK= JK .
From this, it is clear that (R, JK) is a Hausdorff space. For x, y ∈ R, x 6= y,
(R,J ) is a Hausdorff space implies there exist open sets U and V in (R, J ) such
that x ∈ U, y ∈ V and U ∩ V = φ. But J ⊆ JK . Hence U, V ∈ JK are such that
x ∈ U, y ∈ V and U ∩ V = φ and this shows that (X, JK) is a Hausdorff topological
space.
123

Is K = {1, 12, 13, . . .} a closed set? Here K is a subset of R and J , JK are two
different topologies on R, 0 ∈ K and 0 /∈ K with respect to (R,J ). Hence K is not
a closed set in (R, J ). But RKK =∞∪n=1
An, where An = (−n, n)KK for each n ∈ N.
Each An is an open set in (R, JK) implies RKK is an open set in (R, JK). This
implies K is a closed set in (R, JK). Also 0 /∈ K. What are the open sets containing
K? If V is an open set containing K, then for each n ∈ N, 1n∈ V, there exists a basic
open set say (an, bn) such that 1n∈ (an, bn) ⊆ V ( 1
n/∈ (an, bn)KK) and 0 < an < bn
implies K ⊆∞∪k=1
(ak, bk) ⊆ V.
Suppose U, V are open sets such that 0 ∈ U and K ⊆ V . Since 0 ∈ U, there
exists a basic open set B such that 0 ∈ B ⊆ U. If B is of the form (a, b) then
(a, b) ∩K 6= φ. So U ∩V 6= φ. If B is of the form (a, b)KK, choose n0 ∈ N such that
1n0< b. Since 1
n0∈ V, there exists an open interval (c, d) such that 1
n0∈ (c, d) ⊆ V.
Now since (a, b) ∩ (c, d) is not empty (it contains 1n0
), it is an interval and hence
uncountable. As K is countable, ((a, b) ∩ (c, d))KK 6= φ, i.e, ((a, b)KK) ∩ (c, d) 6= φ.
Therefore U ∩ V 6= φ.
So we have proved that there cannot exist open sets U, V in (R, JK) with
0 ∈ U , K ⊆ V and U ∩ V = φ. This shows that (R, JK) is not a regular space.
Definition 5.3.6. A topological space (X,J ) is said to be a normal space if and
only if it satisfies:
(i) (X,J ) is a T1-space,
(ii) A,B closed sets in X, A ∩ B = φ implies there exist open sets U, V in X such
that A ⊆ U,B ⊆ V and U ∩ V = φ.
Remark 5.3.7. It is to be noted that every normal space is a regular space. �
124

Theorem 5.3.8. Every metric space (X, d) is a normal space, That is if Jd is the
topology induced by the metric then the topological space (X, Jd) is a normal space.
Proof. Let A, B be disjoint closed subsets of X. Then for each a ∈ A, a /∈ B = B
implies d(a,B) = inf{d(a, b) : b ∈ B} > 0. If ra = d(a,B) > 0 then B(a, ra) ∩ B = φ
(if there exists b0 ∈ B such that d(b0, a) < ra, then ra = d(a,B) ≤ d(a, b0) < ra a
contradiction). Similarly for each b ∈ B there exists rb > 0 such that B(b, rb)∩A = φ.
Let U = ∪a∈A
B(a, ra3
), V = ∪b∈B
B(a, rb3
). Now it is easy to prove that U ∩ V = φ.
Hence if A,B are disjoint closed subsets of X then there exist open sets U, V in X
such that A ⊆ U,B ⊆ V and U ∩V = φ. This implies (X, Jd) is a normal space. �
Theorem 5.3.9. A T1-topological space (X,J ) is regular if and only if whenever x
is a point of X and U is an open set containing x then there exists an open set V
containing x such that V ⊆ U.
Proof. Assume that (X,J ) is a regular topological space, x ∈ X and U is an open
set containing x. Now x ∈ U implies x /∈ A = U c = XKU, the complement of the
open set U. Now A is a closed set and x /∈ A. Hence X is a regular space implies there
exist open sets V and W of X such that x ∈ V , A = U c ⊆ W and V ∩W = φ. Now
V ∩W = φ implies V ⊆ W c ⊆ U (we have U c ⊆ W ), V ⊆ W c implies V ⊆ W c = W c
(W is an open set implies W c is a closed set) implies V ⊆ U . Hence for x ∈ X and
for each open set U containing x, there exists an open set V containing x such that
V ⊆ U.
Now let us assume that the above statement is satisfied. Our aim here is to
prove that (X,J ) is a regular space. So take a closed set A of X and a point x ∈ XKA.
Now A is a closed subset of X implies U = XKA is an open set containing x. Hence
125
by our assumption there exists an open set V containing x such that V ⊆ U = Ac.
Now V ⊆ Ac implies A ⊆ (V )c = XKV . So V and (V )c = W are open sets satisfying
x ∈ V,A ⊆ W and V ∩W = V ∩ (V )c ⊆ V ∩ V c = φ. (V ⊆ V implies (V )c ⊆ V c.)
Hence by definition (X,J ) is a regular space. �
In a similar way we prove the following theorem.
Theorem 5.3.10. A T1-topological space is a normal space if and only if whenever A
is a closed subset of X and U is an open set containing A, then there exists an open
set V containing A such that V ⊆ U.
Proof. Assume that (X,J ) is a normal topological space. Now take a closed set
A and an open set U in X such that A ⊆ U . Now A ⊆ U implies U c ⊆ Ac. Here
A,U c = B are closed sets such that A ∩B = A ∩ U c ⊆ U ∩ U c = φ. That is A,B are
disjoint closed subsets of the normal space (X,J ). Hence there exist open sets U,W
in X such that A ⊆ V,B = U c ⊆ W and V ∩W = φ. Further V ⊆ W c (note: V ⊆ W c
implies V ⊆ W c = W c). Now V ⊆ W c ⊆ U . Hence whenever A is a closed set and U
is an open set containing A then there exists an open set V such that A ⊆ V, V ⊆ U.
Now let us assume that the above statement is satisfied. So our aim is to prove that
(X,J ) is a normal space. So start with disjoint closed subsets say A,B of X. Now
A∩B = φ implies A ⊆ Bc = U. That is U is an open set containing the closed set A.
Hence by our assumption there exists an open set V such that A ⊆ V, V ⊆ U . Now
V ⊆ U implies U c ⊆ (V )c implies B ⊆ (V )c. Further V ∩ (V )c ⊆ V ∩ V c = φ. That is
whenever A,B are closed subsets of X, then there exist open sets V and (V )c = W
such that A ⊆ V,B ⊆ W and V ∩W = φ. Therefore by definition (X,J ) is a normal
space. �
126
Example of a topological space which is regular but not normal.
Let Jl be a lower limit topology on R. That is Rl = (R,Jl). Now let us prove
that the product space Rl × Rl is a regular space. (If X, Y are regular topological
spaces then the product space X × Y is a regular space. Hence it is enough to prove
that Rl is a regular space.) For (x, y) ∈ R2, each basic open set U of the form
U = [x, a)× [y, b) is both open and closed. Hence for each basic neighbourhood U of
(x, y) in Rl ×Rl there exists a neighbourhood V = U of (x, y) such that V = U ⊆ U.
Now if U ′ is any open set containing (x, y) then there exists a basic open set U as
given above such that (x, y) ∈ U = [x, a) × [y, b) ⊆ U ′. Therefore V = U is an open
set containing (x, y) and V = U = U ⊆ U ′. Also Rl ×Rl is a Hausdorff space. Hence
Rl ×Rl is a regular space. Now let us take Y = {(x, y) ∈ R2 : y = −x} then for each
(x, y) ∈ Y there exists a, b ∈ R, x < a, y < b such that ([x, a)× [y, b))∩Y = {(x, y)}.
Hence each singleton {(x, y)} is open in the subspace Y of Rl ×Rl. This proves that
the subspace Y of Rl × Rl is discrete. Also Y is a closed subset of Rl × Rl. Let
A = {(x, y) ∈ R2 : y = −x ∈ Q}, B = {(x, y) ∈ R2 : y = −x ∈ Qc}. Now A,B are
closed sets in Y and Y is a closed set in Rl×Rl implies A,B are closed in Rl×Rl. Also
A ∩ B = φ. Suppose there exist open sets U, V in Rl × Rl satisfying A ⊆ U,B ⊆ V.
Then we can observe that U ∩ V 6= φ. Therefore the product space Rl × Rl is not a
normal space.
Remark 5.3.11. We can prove that (R,Jl) = Rl is a normal space. So, Rl ×Rl is a
regular space but it is not a normal space. �
We have already proved that every compact subset of Hausdorff topological
space is closed. Essentially we use the same proof technique used there to prove the
following theorem:
127

Theorem 5.3.12. Every compact Hausdorff topological space (X,J ) is a regular
space.
Proof. Let A be a closed subset of X and x ∈ XKA, then for each y ∈ A, x 6= y.
Hence X is a Hausdorff space implies that there exist open sets Uy, Vy in X satisfying
x ∈ Uy, y ∈ Vy and Uy ∩ Vy = φ. We know that closed subset of a compact space is
compact. Here A ⊆ ∪y∈A
Vy. That is {Vy : y ∈ A} is an open cover for the compact
space A. Therefore there exists n ∈ N and y1, y2, . . . , yn ∈ A such that A ⊆n∪i=1
Vyi .
Let U =n∩i=1
Uyi and V =n∪i=1
Vyi . Then U, V are open sets in X satisfying x ∈ U,A ⊆ V
and U ∩ V ⊆ U ∩ (Vy1 ∪ Vy2 ∪ · · · ∪ Vyn) = (U ∩ Vy1) ∪ (U ∩ Vy2) ∪ · · · ∪ (U ∩ Vyn)
⊆ (Uy1 ∩ Vy1) ∪ (Uy2 ∩ Vy2) ∪ · · · ∪ (Uyn ∩ Vyn) = φ. Hence by definition (X,J ) is a
regular space. �
Now let us prove that every compact Hausdorff space is a normal space.
Theorem 5.3.13. Every compact Hausdorff space (X,J ) is a normal space.
Proof. Let A,B be disjoint closed sets in X. Then for each x ∈ A, x /∈ B. Now
(X,J ) is a regular space implies there exist open sets Ux, Vx satisfying: x ∈ Ux;
B ⊆ Vx and Ux ∩ Vx = φ. Now {Ux : x ∈ A} is an open cover for A implies there
exists n ∈ N, x1, x2, . . . , xn ∈ A such that A ⊆n∪i=1
Uxi . Let U = Ux1 ∪ Ux2 ∪ · · · ∪ Uxnand V = Vx1 ∩Vx2 ∩ · · · ∩Vxn . Then U, V are open sets in X satisfying A ⊆ U,B ⊆ V
and U ∩ V = φ. Hence by definition (X,J ) is a normal space. �
Theorem 5.3.14. Closed subspace of a normal topological space (X,J ) is normal.
Proof. Let Y be a closed subspace of (X,J ). That is Y is a closed subset of (X,J )
and JY = {A∩Y : A ∈ J } is a topology on Y . So we will have to prove that (Y,JY )
is a normal space. To prove this, take a closed set A ⊆ Y and an open set U in (Y,JY )
128
such that A ⊆ U. Now U is an open set in (Y,JY ) implies there exists V ∈ J such
that U = V ∩Y . Also A is a closed set in the subspace implies A = AY = A∩Y (here
AY denotes the closure of A in (Y,JY ) and A denotes the closure of A in (X,J )).
Now A, Y are closed sets in X implies A ∩ Y is also a closed set in X. Hence A is
a closed set in (X,J ) and V is an open set in (X,J ) containing A and (X,J ) is
a normal topological space implies there exists an open set W in (X,J ) such that
A ⊆ W and W ⊆ V. Now W ∩ Y is an open set in (Y,JY ) and A ⊆ W ∩ Y and
W ∩ Y ⊆ W ∩ Y ⊆ V ∩ Y ⊆ U . We started with a closed set A in (Y,JY ) and an
open set U in (Y,JY ) such that A ⊆ U. Now we have proved that there exists an
open set W ∩ Y in (Y,JY ) satisfying A ⊆ W ∩ Y and (W ∩ Y )Y = W ∩ Y ∩ Y =
W ∩ Y ⊆ U . That is W ∩ Y is an open set in the subspace containing A and closure
of this open set with respect to the subspace (Y,JY ) is contained in U . Hence (Y,JY )
is a normal space. �
5.4 Urysohn Lemma
Now let us prove the following important theorem known as Urysohn lemma.
Theorem 5.4.1. Let (X, J ) be a normal space and A, B be disjoint nonempty closed
subsets of X. Then there exists a continuous function f : X → [0, 1] such that
f(x) = 0 for every x in A, and f(x) = 1 for every x in B.
Proof. A ∩ B = φ implies A ⊆ Bc = XKB. Hence Bc is an open set containing
the closed set A. Now X is a normal space implies there exists an open set U0 such
that A ⊆ U0 and U0 ⊆ Bc = U1. Now [0, 1] ∩ Q is a countable set implies there
exists a bijective function say f : N → [0, 1] ∩ Q satisfying f(1) = 1, f(2) = 0 and
f(NK{1, 2}) = (0, 1) ∩Q. That is [0, 1] ∩Q = {r1, r2, r3, . . .} such that r1 = 1, r2 = 0
129

and f(k) = rk for k ≥ 3.
Aim: To define a collection {Up}p∈[0,1]∩Q of open sets such that for p, q ∈ [0, 1]∩Q,
p < q implies Up ⊆ Uq.
Let Pn = {r1, r2, . . . , rn}. Assume that Up is defined for all p ∈ Pn, where n ≥ 2 and
this collection satisfies the property namely p, q ∈ [0, 1] ∩ Q, p < q implies Up ⊆ Uq.
Note that this result is true when n = 2. Now let us prove this result for Pn+1. Here
Pn+1 = Pn ∪ {rn+1}.
0 p q 1rn+1
Figure 5.2
Let p, q ∈ Pn+1 be such that p = max{r ∈ Pn+1 : r < rn+1} and q = min{r ∈ Pn+1 :
r > rn+1}. Now p, q 6= rn+1 implies p, q ∈ Pn. By our assumption Up, Uq are known
and Up ⊆ Uq. Now Uq is an open set containing the closed set Up and X is a normal
space. Hence there exists an open set say Urn+1 such that Up ⊆ Urn+1 and U rn+1 ⊆ Uq.
If r, s ∈ Pn then we are through.
Suppose r ∈ Pn and s = rn+1 then r ≤ p or r ≥ q. If r ≤ p, U r ⊆ Up ⊆ Up ⊆
Us. If r ≥ q, U s ⊆ Uq ⊆ U q ⊆ Ur and therefore by induction Up is defined for all
p ∈ [0, 1] ∩Q and p, q ∈ [0, 1] ∩Q, p < q implies Up ⊆ Uq.
Now define Up = φ, if p ∈ Q, p < 0 and Up = X if p ∈ Q, p > 1. Then
p, q ∈ Q, p < q implies Up ⊆ Uq. Define f : X → [0, 1] as f(x) = inf{p ∈ Q :
x ∈ Up}. Now x ∈ A, then x ∈ U0. Hence x ∈ Up for all p ≥ 0. In this case
{p ∈ Q : x ∈ Up} = [0,∞) ∩Q. Hence inf{p ∈ Q : x ∈ Up} = 0.
130
That is x ∈ A implies f(x) = 0. Now suppose x ∈ B = U c1 then x /∈ Up for all
p ≤ 1. Hence {p ∈ Q : x ∈ Up} = [1,∞) ∩Q implies f(x) = 1 for all x ∈ B.
Now let us prove that f is a continuous function. S = {[0, a), (a, 1] : 0 < a < 1}
is a subbase for [0, 1]. Hence it is enough to prove that for each a, 0 < a < 1, f−1([0, a))
and f−1((a, 1])) are open sets in X. For 0 < a < 1, let us prove that f−1([0, a)) =
{x ∈ X : 0 ≤ f(x) < a} = ∪p<a
Up. Now x ∈ f−1([0, a)) implies f(x) < a implies there
exists a rational number p such that f(x) < p < a. By the definition of f(x), x ∈ Up.
Hence
f−1([0, a)) ⊆ ∪p<a
Up. (5.2)
Now let x ∈ Up for p < a implies f(x) ≤ p implies x ∈ f−1([0, a)). Hence we have
∪p<a
Up ⊆ f−1([0, a)). (5.3)
From Eqs. (5.2) and (5.3) we have f−1([0, a)) = ∪p<a
Up. Now each Up is an open set
implies that ∪p<a
Up is an open set in X. In a similar way we can prove that f−1((a, 1])
is also an open subset of X for each 0 < a < 1. Now f : X → [0, 1] such that
inverse image of each subbasic open set is an open set implies that f : X → [0, 1] is
a continuous function. �
Theorem 5.4.2. Let (X, J ) be a normal space and A, B be disjoint nonempty closed
subsets of X. Then for a, b ∈ R, a < b there exists a continuous function f : X → [a, b]
such that f(x) = a for every x in A, and f(x) = b for every x in B.
Proof. Define g : [0, 1] → [a, b] as g(t) = a + (b − a)t then g is continuous. Now
by theorem 5.4.1 there is a continuous function f1 : X → [0, 1] such that f1(x) = 0,
for all x ∈ A and f1(x) = 1 for all x ∈ B. The function f = g ◦ f1 : X → [a, b]
131

is a continuous function and further f(x) = g(f1(x)) = g(0) = a for all x ∈ A and
f(x) = g(f1(x)) = g(1) = b for all x ∈ B. �
Remark 5.4.3. Let A, B be nonempty disjoint closed subsets of a metric space
(X, d). Define f : X → R as f(x) =d(x,A)
d(x,A) + d(x,B). Observe that f is a continuous
function satisfying the condition that f(x) = 0 for all x ∈ A and f(x) = 1 for all
x ∈ B. It shows that the proof of Urysohn lemma is trivial (or say simple) if our
topological space is a metrizable topological space. �
5.5 Tietze Extension Theorem
Theorem 5.5.1. Tietze Extension Theorem. Let A be a nonempty closed subset
of a normal space X and let f: A → [−1, 1] be a continuous function. Then there
exists a continuous function g : X → [−1, 1] such that g(x) = f(x) for all x in A.
Proof. The sets[−1, −1
3
],[13, 1]
are closed subsets of [−1, 1] and f : A → [−1, 1]
is a continuous function implies A1 = f−1([
13, 1])
, B1 = f−1([−1, −1
3
])are closed
subsets of the subspace A. (Here consider A as a subspace of X.) Now x ∈ A1 ∩ B1
implies f(x) ∈[−1, −1
3
]∩[13, 1]
a contradiction. Hence A1 ∩ B1 = φ. Now A1, B1
are closed in A and A is closed in X implies A1, B1 are closed in the normal space
X. Hence by Urysohn’s lemma there exists a continuous function f1 : X →[−1
3, 13
]such that f1(A1) = 1
3and f1(B1) = −1
3then |f(x) − f1(x)| ≤ 2
3for all x ∈ A.
Now consider the function f − f1 : A →[−2
3, 23
]then A2 = (f − f1)−1
([29, 23
])and
B2 = (f − f)−1([−2
3, −2
9
])are disjoint closed subsets of X. By Urysohn lemma there
exists a continuous function f2 : X →[−2
9, 29
]such that f2(A2) = 2
9and f2(B2) = −2
9.
Also |f(x)− (f1(x) + f2(x))| ≤ 49
for all x ∈ A. By proceeding as above by induction
132

for each n ∈ N there exists a continuous function fn : X →[−2n−1
3n, 2
n−1
3n
]such that
∣∣f(x)−n∑i=1
fi(x)∣∣ ≤ (2
3
)nfor all x ∈ A. (5.4)
That is fn : X → [−1, 1] is a sequence of continuous functions such that |fn(x)| ≤2n−1
3n= Mn and
∞∑n=1
Mn < ∞. By Weierstrass M-test, the series∞∑n=1
fn(x) converges
uniformly on X. That is, if sn(x) =n∑i=1
fi(x), x ∈ X then sn(x) converges uniformly
on X. Also each sn : X → R is continuous. We know, from analysis, if a sequence
sn : X → R of continuous functions converges uniformly to a function g : X → R then
g is also a continuous function. Hence g : X → R be defined as g(x) =∞∑n=1
fn(x) is
continuous. Now for each x ∈ A,∣∣∣∣f(x)−
n∑i=1
fi(x)
∣∣∣∣ ≤ (23)n (from (5.4)). Therefore
|g(x)− f(x)| =∣∣∣∣ limn→∞
n∑i=1
fi(x)− f(x)
∣∣∣∣ = limn→∞
∣∣∣∣ n∑i=1
fi(x)− f(x)
∣∣∣∣ ≤ limn→∞
(23
)n= 0. This
implies g(x) = f(x) for all x ∈ A. �
Definition 5.5.2. A topological space (X, J ) is said to be completely regular
if (i) for each x ∈ X, singleton {x} is closed in (X, J ) (that is (X, J ) is a T1-space),
(ii) for x ∈ X and any nonempty closed set A with x /∈ A there exists a continuous
function f : X → [0, 1] such that f(x) = 0 and f(y) = 1 for all y ∈ A.
Result 5.5.3. Every normal space (X, J ) is completely regular.
Proof. Let x ∈ X and A be a nonempty closed set with x /∈ A. Now {x}, A are
disjoint closed sets. Hence by Urysohn’s lemma there exists a continuous function
f : X → [0, 1] such that f(x) = 0 and f(y) = 1 for all y ∈ A. �
Result 5.5.4. If Y is a subspace of a completely regular space (X, J ) then (Y , JY )
is also a completely regular space.
133

Proof. Let y ∈ Y and A be a closed set in (Y , JY ) with y /∈ A. Since A is a closed
set in Y there exists a closed set F in (X, J ) such that A = F ∩Y, y /∈ F , F is a closed
set in the completely regular space (X, J ) implies there exists a continuous function
f : X → [0, 1] such that f(y) = 0 and f(a) = 1 for all a ∈ F . Now f : X → [0, 1] is a
continuous function implies f |Y = g : (Y , JY ) → [0, 1] (here g(x) = (f |Y )(x) = f(x)
for all x ∈ Y ) is a continuous function. Now g: (Y , JY ) → [0, 1] is a continuous
function such that g(y) = f(y) = 0 and g(a) = f(a) = 1 for all a ∈ A = F ∩ Y . Also
subspace of a T1-space (do it as an exercise) is T1-space. Hence the subspace (Y , JY )
is a completely regular space. �
5.6 Baire Category Theorem
Baire category theorem has many applications in topology and analysis. Our
aim here is to state and prove this theorem for locally compact Hausdorff topological
spaces.
Definition 5.6.1. A subset A of a topological space (X,J ) is said to be nowhere
dense in X if and only if (A)◦ = int(A) = φ.
Example 5.6.2. (i) N is nowhere dense in R (R with standard topology).
(ii) Q is dense in R, that is Q = R, and hence Q is not nowhere dense in R. Here we
have (Q)◦ = R◦ = R 6= φ.
Definition 5.6.3. A topological space (X,J ) is said to be of first category if and
only if there exists a countable collection {En}∞n=1 of subsets of X satisfying:
(i) for each n ∈ N,(En)◦
= En◦
= φ, and
(ii) X =∞∪n=1
En.
134

Definition 5.6.4. A nonempty subset Y of a topological space (X,J ) is said to be
of first category in X if and only if there exists a countable collection {En}∞n=1 of
subsets of X satisfying:
(i) for each n ∈ N,(En
)◦= φ, and
(ii) Y =∞∪n=1
En.
Remark 5.6.5. If Y is a nonempty subset of a topological space (X,J ) then (Y,JY )
(JY = {U ∩ Y : U ∈ J }) is also a topological space. It is possible that a subset Y of
a topological space (X,J ) is of first category in (X,J ) but the subspace (Y,JY ) is
not of first category.
Example 5.6.6. Let X = R and Js be the standard topology on R. Then Y = N,
the set of all natural numbers, is of first category in R, but the subspace (N,Js/N)
is not of first category. For each n ∈ N let En = {n}. As En contains only one
element namely n, (En)◦ = {n}◦ = φ in R. Also N =∞∪n=1{n} = {1, 2, . . .} =
∞∪n=1
En.
Hence N is of first category in (R,Js). But note that the subspace (N,Js/Y ) is the
discrete topological space on N. For n ∈ N, (n − 1, n + 1) is an open set in R and
hence (n − 1, n + 1) ∩ N = {n} is an open set in the subspace (N,Js/N). Now it is
easy to see that there cannot exist any countable collection {An}∞n=1 of subsets of R
satisfying (An)◦ = φ and∞∪n=1
An = N. Note that for An ⊆ N, (An)◦ = An with respect
to (N,Js/N) and hence (N,Js/N) is not of first category.
Definition 5.6.7. If a topological space (X,J ) is not of first category then we
say that the topological space (X,J ) is of second category.
Note. We have seen that N is of first category in (R,Js) but the topological space
(N,Js/Y ) is of second category.
135

Now our main aim is to prove that every locally compact Hausdorff topological space
is of second category.
Remark 5.6.8. First let us prove that every locally compact Hausdorff topological
space (X,J ) is a regular space. So let us take a closed set A in (X,J ) and a point
x ∈ XKA.
We have seen that every compact Hausdorff space is a normal space and hence
every compact Hausdorff space is a regular space. We know that the one point of
compactification (X∗,J ∗) of (X,J ) is a compact Hausdorff space and J ∗ |X= J .
That is (X,J ) is a subspace of the compact Hausdorff space (X∗,J ∗). Also it is
easy to prove that subspace of a regular space is regular (and it is to be noted that
subspace of a normal space need not be a normal space) and hence (X∗,J ∗) is a
regular space implies the subspace (X,J ) of (X∗,J ∗) is also a regular space.
Now we are in a position to state and prove the main theorem.
Theorem 5.6.9. Baire Category Theorem. Let (X,J ) be a locally compact
Hausdorff topological space and {En}∞n=1 be a countable collection of open sets in
(X,J ). Further suppose for each n ∈ N, En = X (En is dense in X) then∞∩n=1
En is
also dense in X. That is( ∞∩n=1
En)
= X.
Proof. We want to prove that∞∩n=1
En is dense in X.
So take x ∈ X and an open set U containing x. Now (X,J ) is a locally compact
Hausdorff space implies there exists an open set V containing x such that V is
compact. Now let U0 = U ∩ V. Then U0 is an open set containing x. Also U0 ⊆ V
implies U0 is a compact set (since closed subset of compact set is compact). Now our
aim is to prove that U ∩( ∞∩n=1
En)6= φ. For each n, En is open and En = X, that is
each En is open and dense in X. Start with n = 1, now x ∈ X = E1 and U0 is an open
136

set containing x implies U0∩E1 6= φ. So take an element say x1 ∈ U0∩E1. Now U0, E1
are open sets implies U0∩E1 is also an open set. Now U0∩E1 is an open set containing
x1 and (X,J ) is a regular space (every locally compact Hausdorff space is a regular
space) implies there exists an open set U1 in X satisfying x1 ∈ U1, U1 ⊆ U0∩E1. Now
x1 ∈ E2 = X implies U1∩E2 6= φ. Let x2 ∈ U1∩E2. Since X is a regular space implies
there exists an open set U2 in X satisfying x2 ∈ U2, U2 ⊆ U1∩E2. Again x2 ∈ E3 = X
and U2 is an open set containing x2 implies U2∩E3 6= φ. Let x3 ∈ U2∩E3. Choose an
open set U3 such that x3 ∈ U3, U3 ⊆ U2 ∩ E3. Continuing in this way (that is using
induction) we get a sequence {xn}∞n=1 in X and a sequence of open sets {Un}∞n=1
satisfying xn ∈ Un, Un ⊆ Un−1∩En for all n ∈ N. Note that Un ⊆ U ∩( n∩k=1
Ek)
for all
n ∈ N. Then {Uk}∞k=1 is a sequence of nonempty closed subsets of X and hence of the
compact subspace U0. Further Uk+1 ⊆ Uk for any k ∈ N implies {Uk}∞k=1 has finite
intersection property. That is {Uk}∞k=1 is a family of closed subsets of the compact
topological space U0 and further {Uk}∞k=1 has finite intersection property. Therefore∞∩k=1
Uk 6= φ. Let a ∈∞∩k=1
Uk. Then a ∈ Uk for all k ∈ N and hence a ∈ U. Also a ∈ En
for all n ∈ N. So a ∈∞∩n=1
En. Thus a ∈ U ∩( ∞∩n=1
En). That is for each x ∈ X and
for each open set U containing x, U ∩( ∞∩n=1
En)6= φ. Hence x ∈
( ∞∩n=1
En). This gives
that X ⊆( ∞∩n=1
En)
and hence X =( ∞∩n=1
En), that is
∞∩n=1
En is dense in X. �
Exercise 5.6.10. Prove that a subset E of a topological space (X,J ) is nowhere
dense in X (that is (E)◦ = φ if and only if (E)c is dense in X.
Remark 5.6.11. It is known that every complete metric space X is of second
category. The notion of completeness cannot be defined in a topological space. So we
give the following version of Baire Category theorem for a locally compact Hausdorff
topological space.
137

Theorem 5.6.12. Every nonempty locally compact Hausdorff topological space
(X,J ) is of second category.
Proof. Proof by contradiction.
Suppose (X,J ) is of first category. Then there exists a countable collection {En}∞n=1
of subsets of X satisfying En◦
= φ and X =∞∪n=1
En =∞∪n=1
En. Therefore Xc =
φ =∞∩n=1
Ec
n and hence φ = φ =∞∩n=1
Enc. But {Ec
n}∞n=1 is a countable collection
of dense open sets, implies by theorem 5.6.9∞∩n=1
Enc
= X 6= φ. This contradicts
φ = φ =∞∩n=1
Enc. Hence (X,J ) is of second category. �
Now we are in a position to prove Urysohn metrization theorem that gives
sufficient conditions under which a topological space is metrizable. Also it is
interesting to note that the well known Nagata-Smirnov metrization theorem gives a
set of necessary and sufficient conditions for metrizability of a topological space.
5.7 Urysohn Metrization Theorem
Theorem 5.7.1. Urysohn Metrization Theorem. Every normal space (X, J )
with a countable basis is metrizable.
Proof. Let B = {B1, B2, . . . , } be a countable basis for (X, J ). Suppose n,m ∈ N
are such that Bn ⊆ Bm then Bn ∩ Bcm = φ. Hence by Urysohn’s lemma there exists
a continuous function say gn,m : X → R such that
gn,m(x) = 0 for all x ∈ Bcm, (5.5)
and
gn,m(x) = 1 for all x ∈ Bn. (5.6)
138

Now take x0 ∈ X and an open set U containing x0. Since B is a basis for (X, J )
there exists Bm ∈ B such that x0 ∈ Bm ⊆ U. Now Bm is an open set containing x0
implies there exists an open set V containing x0 such that V ⊆ Bm. Hence there
exists a basic open set Bn containing x0 such that Bn ⊆ V ⊆ Bm. Hence for such
pair (n,m) we have a continuous function gn,m : X → R satisfying Eq. (5.5).
So if x0 ∈ X and U is an open set containing x0 then there exists a continuous
function gn,m : X → R such that gn,m(x0) = 1 and gn,m(x) = 0 for all x ∈ U c ⊆ Bcm.
So we have proved that there exists a countable collection of continuous functions
fn : X → [0, 1] such that for x0 ∈ X and open set U containing x0, there exists
n ∈ N such that fn(x0) = 1 > 0 and fn(x) = 0 for all x ∈ U c. It is to be noted that
{(n,m) : n,m ∈ N} is a countable set. We know that (refer chapter 2, and exercise
9 of chapter 5) Rw = R× R× R× · · · with product topology is metrizable. That is
there is a metric d on Rw such that Jd, the topology on Rw induced by d, coincides
with the product topology on Rw.
Now let us define a map T : X → Rw as T (x) = (f1(x), f2(x), . . . , ) and using
this map we define d1(x, y) = d(T (x), T (y)) and conclude that Jd1 = J . This will
prove that (X, J ) is a metrizable topological space. Now let us prove that (X,J )
is homeomorphic to a subspace of Rw. Each fn : X → R is a continuous function
implies T (x) = (f1(x), f2(x), . . .) is a continuous function.
To prove T is injective (one-one).
Let x, y ∈ X be such that x 6= y. Then there exist open sets U, V ∈ X such
that x ∈ U, y ∈ V and U ∩ V = φ. Now U is an open set containing x implies there
exists n ∈ N such that fn(x) = 1 and fn(y) = 0 (note that y ∈ U c). This implies
fn(x) 6= fn(y) for this particular n ∈ N and hence (f1(x), f2(x), . . . , fn(x), . . .) 6=
139
(f1(y), f2(y), . . . , fn(y), . . .). This means Tx 6= Ty. That is x, y ∈ X, x 6= y implies
Tx 6= Ty. This implies T is 1-1.
Now it is enough to prove that T maps open set A in X to an open set T (A)
in Y = T (X). Let A be an open set and y0 ∈ T (A). Now y0 ∈ T (A) implies there
exists x0 ∈ A such that T (x0) = y0. Now x0 ∈ A, A is an open set implies there exists
n0 ∈ N such that fn0(x0) = 1 and fn0(x) = 0 for all x ∈ Ac. We know that for each
n ∈ N the projection map pn : Rw → R defined as pn ((xk)∞k=1) = xn is a continuous
map. Hence (0, ∞) is an open set implies V = p−1n0((0,∞)) is an open subset of Rw.
This implies V ∩ Y is an open set in Y .
Now let us prove that y0 ∈ V ∩Y and V ∩Y ⊆ T (A). pn0(y0) = (pn0 ·T )(x0) =
fn0(x0) = 1 > 0 implies y0 ∈ V . Also y0 ∈ Y . Hence y0 ∈ V ∩ Y . That is V ∩ Y is
an open set in Y containing the point y0.
Now we claim that V ∩Y ⊆ T (A). So, let y ∈ V ∩Y . Then there exists x ∈ X
such that y = Tx. This implies pn0(y) ∈ (0,∞) and pn0(y) = pn0(T (x)) = fn0(x) ∈
(0,∞). Hence x ∈ A (fn0(x) = 0 for x ∈ Ac). So we have proved that y = Tx ∈ V ∩Y
implies y = Tx ∈ T (A). Hence V ∩ Y is an open set in Y containing Tx and this
set is contained in T (A). Therefore T (A) is open in Y . Hence we have proved that
T : (X,J )onto−−→ (Y, dY ) is a homeomorphism. (Here (Y, dY ) is a subspace of (Rw, d).)
Now d1(x, y) = d(Tx, Ty) for all x, y ∈ X implies d1 is a metric on X. Also it is easy
to see that a subset A of X is open in (X,J ) if and only if A is open in (X,Jd1).
Therefore Jd1 = J . �
140

Exercises
1. Suppose a Hausdorff topological space (X,J ) has the following property: A and
B are disjoint closed subsets of X implies there exists a continuous function say
fAB : X → [0, 1] such that f(x) = 0 if x ∈ A and f(x) = 1 if x ∈ B then prove
that (X,J ) is a normal space.
2. If (X, J ) is a connected normal space containing more than one point, then
prove that X is an uncountable set. (In particular every connected metric space
containing more than one point is an uncountable set.)
3. Let X = l∞ = {x = (xn) : {xn}∞n=1} is a bounded sequence of real numbers.
For x = (xn) ∈ l∞, y = (yn) ∈ l∞, let d∞(x, y) = supn≥1|xn − yn| . Prove (i) d∞
is a metric on l∞, and (ii) Y = {x = (xn) : xn = 0 or 1 } is not a separable
subspace of l∞. (Hint: For x = (xn) ∈ Y, y = (yn) ∈ Y , x 6= y, d(x, y) = 1.)
4. Prove that every separable metric space (X, d) is a second countable space. (It is
interesting to note that every second countable topological space is separable.)
5. Show that every locally compact Hausdorff space is regular.
6. Prove that a subspace of first countable space is first countable and a subspace
of a second countable space is second countable.
7. Is it true that product of first (second) countable spaces is first (second)
countable? Justify your answer.
8. Prove that every locally compact Hausdorff space (X, J ) is completely regular.
141

9. For x, y ∈ R, let d(x, y) = min{d(x, y), 1}, then d is a metric on R that induces
the usual topology on R. Let Rw = {x = (x1, x2, . . .) : xn ∈ R, n ∈ N}. For
x = (xn) ∈ Rw, y = (yn) ∈ Rw, let d(x, y) = sup{d(xn,yn)
n
}then
(i) prove that d is a metric on Rw,
(ii) prove that Jd, the topology on Rw induced by the metric d is same as the
product topology on Rw =∞Πn=1
Rn, where Rn = R, with usual topology on R.
10. Let X, Y be compact normal spaces. Then prove that X × Y is also a compact
normal space.
11. Find all the topologies on X = {1, 2, 3} which are regular.
12. Prove that a T1-topological space (X,J ) is normal if and only if given any two
disjoint closed sets A, B in X there exist open sets U, V in X such that
(i) A ⊆ U,B ⊆ V and (ii) U ∩ V = φ.
13. Prove that homeomorphic image of a normal space is normal.
14. Can there exists a continuous function f : R2 → [0, 1] such that f(x, y) = 0,
0 ≤ x, y ≤ 1 and f(x, y) = 1, x = 3, 0 ≤ y ≤ 1. Justify your answer.
142
Related Documents











