1 TOMOGRAFIA COMPUTADORIZADA TECNOLOGIA E FUNCIONAMENTO DOS EQUIPAMENTOS Denise Yanikian Nersissian 1 1 HISTÓRIA DA TOMOGRAFIA COMPUTADORIZADA O desenvolvimento da tomografia computadorizada foi uma revolução para a medicina, permitindo que órgãos e tecidos fossem visualizados sem sobreposição de imagens, podendo-se ainda escolher a vista anatômica (axial, coronal ou sagital) mais favorável para o correto diagnóstico. “Tomos” é uma palavra grega que significa “corte” ou “seção”. As primeiras imagens deste tipo foram obtidas por meio da superposição de várias aquisições mantendo- se um objeto de interesse em foco e todos os outros apareciam desfocados (Figura 1). Esta técnica ficou conhecida por: estratigrafia, planigrafia, planeografia, laminografia ou ainda tomografia convencional 1 . 1 Física Médica do Instituto de Física da Universidade de São Paulo. Doutora em Tecnologia Nuclear - Aplicações (Instituto de Pesquisas Energéticas e Nucleares - SP), Especialista em Radiologia Diagnóstica (Associação Brasileira de Física Médica)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
TOMOGRAFIA COMPUTADORIZADA
TECNOLOGIA E FUNCIONAMENTO DOS EQUIPAMENTOS
Denise Yanikian Nersissian1
1 HISTÓRIA DA TOMOGRAFIA COMPUTADORIZADA
O desenvolvimento da tomografia computadorizada foi uma revolução para a
medicina, permitindo que órgãos e tecidos fossem visualizados sem sobreposição
de imagens, podendo-se ainda escolher a vista anatômica (axial, coronal ou sagital)
mais favorável para o correto diagnóstico.
“Tomos” é uma palavra grega que significa “corte” ou “seção”. As primeiras imagens
deste tipo foram obtidas por meio da superposição de várias aquisições mantendo-
se um objeto de interesse em foco e todos os outros apareciam desfocados (Figura
1). Esta técnica ficou conhecida por: estratigrafia, planigrafia, planeografia,
laminografia ou ainda tomografia convencional1.
1 Física Médica do Instituto de Física da Universidade de São Paulo. Doutora em Tecnologia Nuclear - Aplicações (Instituto de Pesquisas Energéticas e Nucleares - SP), Especialista em Radiologia Diagnóstica (Associação Brasileira de Física Médica)

2
Figura 1 Representação do princípio de funcionamento de um planígrafo. (a) Raios X e filme
produzem as imagens A1 e B1 dos objetos A e B, (b) raios X e filmes se movem
simultaneamente, de forme que a imagem A2 se sobrepõe a imagem de A1, o mesmo
não acontece com B2, assim gera-se uma imagem desfocada de B
O que eu preciso saber da história dos desenvolvimentos da tomografia?
É importante destacar os pesquisadores e experimentos que contribuíram para o
desenvolvimento da tomografia computadorizada:
Johann Radon2: um matemático austríaco que publicou em 30 de abril de
1917 uma teoria que possibilitou a resolução de um sistema matemático
que foi utilizado posteriormente no tratamento das imagens em tomografia
computadorizada; esta teoria ficou conhecida como “Transformada de
Radon”.
David E. Kuhl e Roy Q. Edwards1: apresentaram a ideia da tomografia
por seção transversal utilizando um radioisótopo emissor de radiação
gama e dois filmes que eram simultaneamente expostos em linhas finas;
isto se tornaria a origem do funcionamento do que hoje é utilizado nos
equipamentos de tomografia por emissão.
⇒ Princípio de funcionamento do planígrafo: Digamos que o ponto A na
Figura 1 seja uma estrutura que se deseja visualizar na imagem. Ao se angular o
feixe, obtêm-se várias projeções, que nada mais são do que um perfil de
intensidade ou de atenuação em cada ângulo de incidência do feixe de raios X.
Neste caso, o ponto A está no plano de interesse e o ponto B não está. Assim, nas
exposições seguintes, haverá uma sobreposição das imagens do ponto A sem
distorções perceptíveis, enquanto que as imagens do ponto B se deslocarão
causando um borramento deste.
⇒ Sistema matemático ou Sistema: conjunto de equações cujo objetivo é
buscar a solução para cada uma das incógnitas ou variáveis.
3
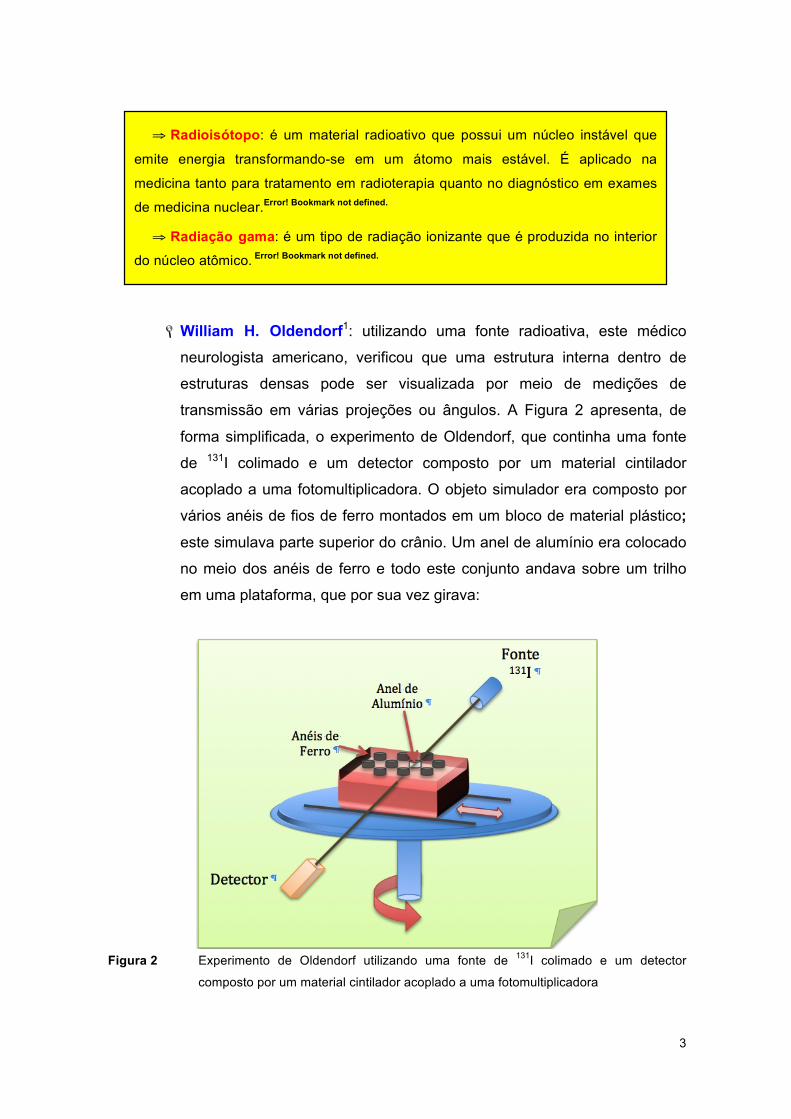
William H. Oldendorf1: utilizando uma fonte radioativa, este médico
neurologista americano, verificou que uma estrutura interna dentro de
estruturas densas pode ser visualizada por meio de medições de
transmissão em várias projeções ou ângulos. A Figura 2 apresenta, de
forma simplificada, o experimento de Oldendorf, que continha uma fonte
de 131I colimado e um detector composto por um material cintilador
acoplado a uma fotomultiplicadora. O objeto simulador era composto por
vários anéis de fios de ferro montados em um bloco de material plástico; este simulava parte superior do crânio. Um anel de alumínio era colocado
no meio dos anéis de ferro e todo este conjunto andava sobre um trilho
em uma plataforma, que por sua vez girava:
Figura 2 Experimento de Oldendorf utilizando uma fonte de 131I colimado e um detector
composto por um material cintilador acoplado a uma fotomultiplicadora
⇒ Radioisótopo: é um material radioativo que possui um núcleo instável que
emite energia transformando-se em um átomo mais estável. É aplicado na
medicina tanto para tratamento em radioterapia quanto no diagnóstico em exames
de medicina nuclear.Error! Bookmark not defined.
⇒ Radiação gama: é um tipo de radiação ionizante que é produzida no interior
do núcleo atômico. Error! Bookmark not defined.
4
Godfrey Newbold Hounsfield1: nasceu no ano de 1919 (Nottinghmshire,
Inglaterra) e estudou engenharia eletrônica e mecânica. Ele fazia parte do
grupo de desenvolvimento da empresa EMI, a mesma que produzia os
discos dos “The Beatles”. Nos experimentos laboratoriais, Hounsfiled
utilizou um conjunto fonte-detector composto por uma fonte de raios gama
que executava um movimento de varredura através de uma plataforma,
onde era posicionado o objeto de interesse. Esta plataforma girava em
intervalos de um grau e cada corte registrava 28 mil medições
armazenadas em uma fita de papel. Todo o processo de aquisição e
processamento das imagens da peça anatômica sob estudo levava nove
dias. Posteriormente, ele conseguiu otimizar este tempo para 9 horas,
substituindo a fonte gama por uma tubo de raios X.
O primeiro protótipo de equipamento aplicado clinicamente foi
apresentado em 1971, era dedicado a exames do crânio e o tempo total
de aquisição e geração das imagens era de 20 minutos. Com os avanços
dos microcomputadores este tempo foi reduzido para 5 minutos. O
primeiro estudo clínico foi realizado no Atkinson-Morley Hospital em uma
paciente com suspeita de lesão cerebral e a imagem obtida pelo exame
mostrava um grande cisto circular de aparência escura6.
Allan MacLeod Cormack1: nasceu em 1924 (Johannesburg, África do
Sul), estudou física nuclear na Cambridge University, trabalhou como
professor de física na University of Cape Town. Como único físico nuclear
desta cidade, ele trabalhou no Groote Schuur Hospital e observando
exames de radioterapia, percebeu a importância de conhecer a atenuação
da radiação nos vários tecidos do corpo humano. Isto poderia ser avaliado
conhecendo-se os coeficientes de atenuação dos raios X e melhorariam a
precisão dos tratamentos na radioterapia. Depois, juntou-se ao grupo de
pesquisadores na Tufts University onde se aplicou nos estudos da teoria
matemática que era necessária para a reconstrução de imagens obtidas
em várias projeções.
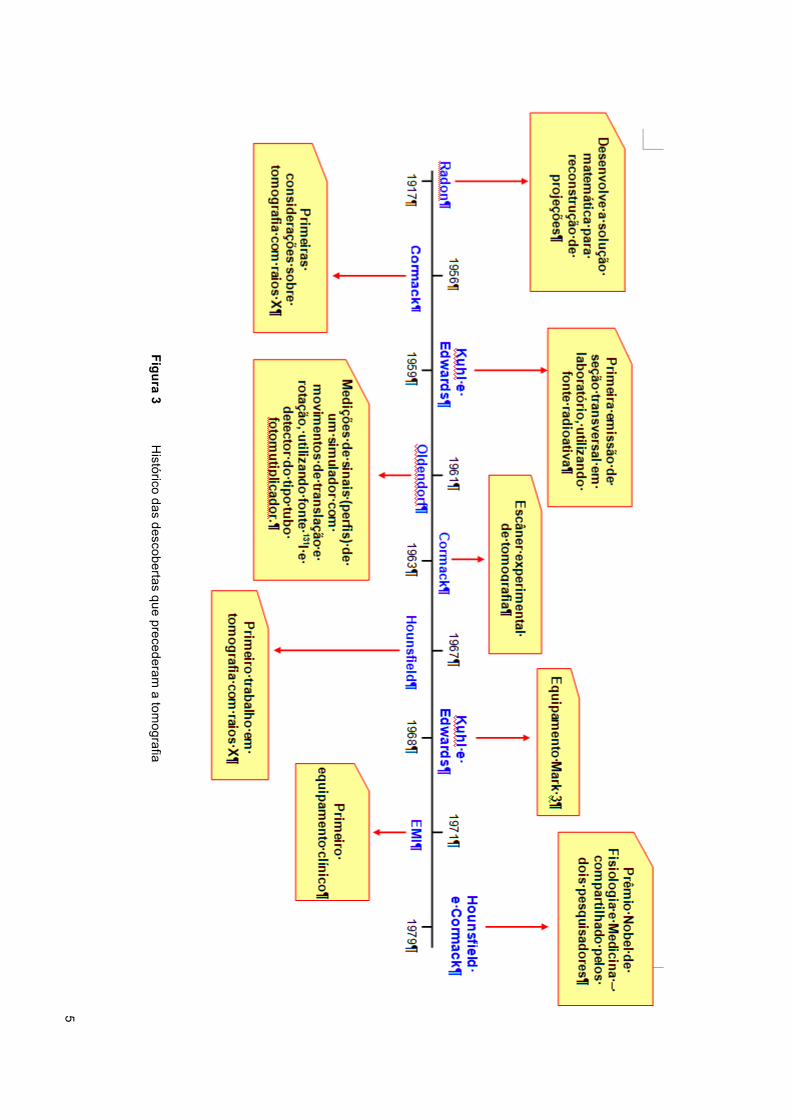
A Figura 3 resume os principais pontos de desenvolvimento ao longo da história que
contribuíram para o que hoje conhecemos por tomografia computadorizada:
5
Figura 3 H
istórico das descobertas que precederam a tom
ografia
6
1.1 GERAÇÕES DOS EQUIPAMENTOS DE TOMOGRAFIA
A subdivisão das diferentes tecnologias de equipamentos de tomografia
computadorizada introduzidas no mercado costuma ser numerada através de
gerações de equipamentos. Estas gerações estão basicamente relacionadas à
geometria de detecção e à forma como os componentes do sistema (tubo de raios X,
detectores e a maca onde é posicionado o paciente) se movimentam durante a
coleta de dados para a produção das imagens. A evolução dessas gerações busca,
em geral, a redução dos tempos de exames e a coleta de dados para a formação
das imagens, com o objetivo de viabilizar a reconstrução de imagens de boa
qualidade mesmo com a presença de movimentos involuntários dos órgãos em
estudo.
Contudo, não há um consenso sobre a definição dessas gerações dos
equipamentos. A maioria dos autores1,3,4 assume que existem quatro ou cinco
gerações de tomógrafos até os dias atuais, sendo algumas delas variações da
terceira geração.
⇒ Movimento de translação: quando o objeto se movimenta em uma direção, com a mesa de exames andando continuamente ou incrementando passo a passo durante a aquisição das imagens nos exames de tomografia.
⇒ Movimento de rotação: quando o objeto gira ao redor de seu próprio eixo, como o conjunto formado pelo tubo de raios X e o detector girando ao redor do paciente nos exames de tomografia.
7
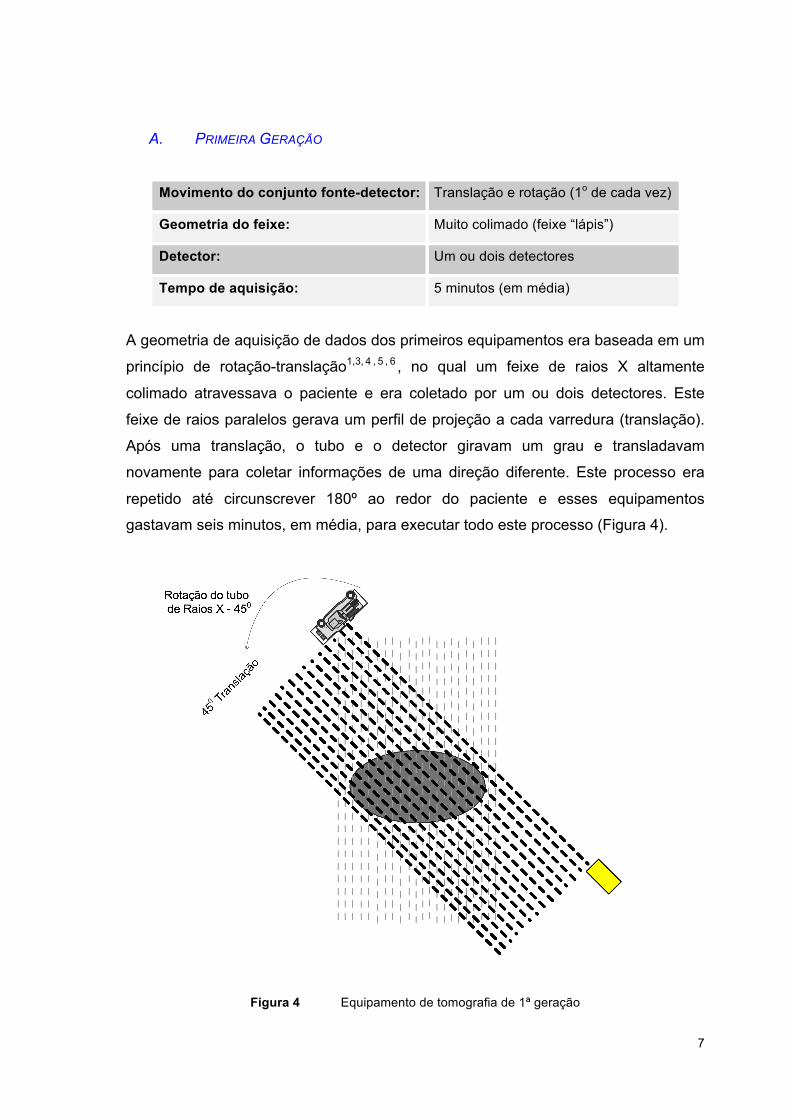
A. PRIMEIRA GERAÇÃO
Movimento do conjunto fonte-detector: Translação e rotação (1o de cada vez)
Geometria do feixe: Muito colimado (feixe “lápis”)
Detector: Um ou dois detectores
Tempo de aquisição: 5 minutos (em média)
A geometria de aquisição de dados dos primeiros equipamentos era baseada em um
princípio de rotação-translação1,3, 4 , 5 , 6 , no qual um feixe de raios X altamente
colimado atravessava o paciente e era coletado por um ou dois detectores. Este
feixe de raios paralelos gerava um perfil de projeção a cada varredura (translação).
Após uma translação, o tubo e o detector giravam um grau e transladavam
novamente para coletar informações de uma direção diferente. Este processo era
repetido até circunscrever 180º ao redor do paciente e esses equipamentos
gastavam seis minutos, em média, para executar todo este processo (Figura 4).
Figura 4 Equipamento de tomografia de 1ª geração
8
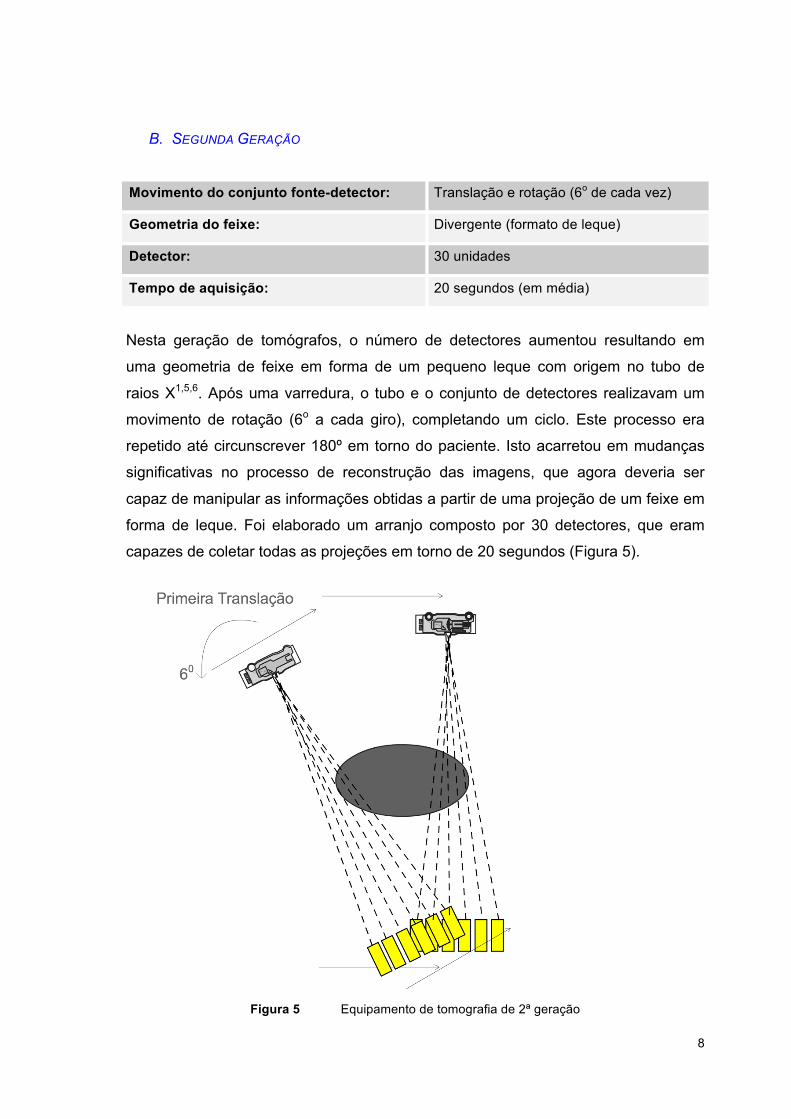
B. SEGUNDA GERAÇÃO
Movimento do conjunto fonte-detector: Translação e rotação (6o de cada vez)
Geometria do feixe: Divergente (formato de leque)
Detector: 30 unidades
Tempo de aquisição: 20 segundos (em média)
Nesta geração de tomógrafos, o número de detectores aumentou resultando em
uma geometria de feixe em forma de um pequeno leque com origem no tubo de
raios X1,5,6. Após uma varredura, o tubo e o conjunto de detectores realizavam um
movimento de rotação (6o a cada giro), completando um ciclo. Este processo era
repetido até circunscrever 180º em torno do paciente. Isto acarretou em mudanças
significativas no processo de reconstrução das imagens, que agora deveria ser
capaz de manipular as informações obtidas a partir de uma projeção de um feixe em
forma de leque. Foi elaborado um arranjo composto por 30 detectores, que eram
capazes de coletar todas as projeções em torno de 20 segundos (Figura 5).
Figura 5 Equipamento de tomografia de 2ª geração
9
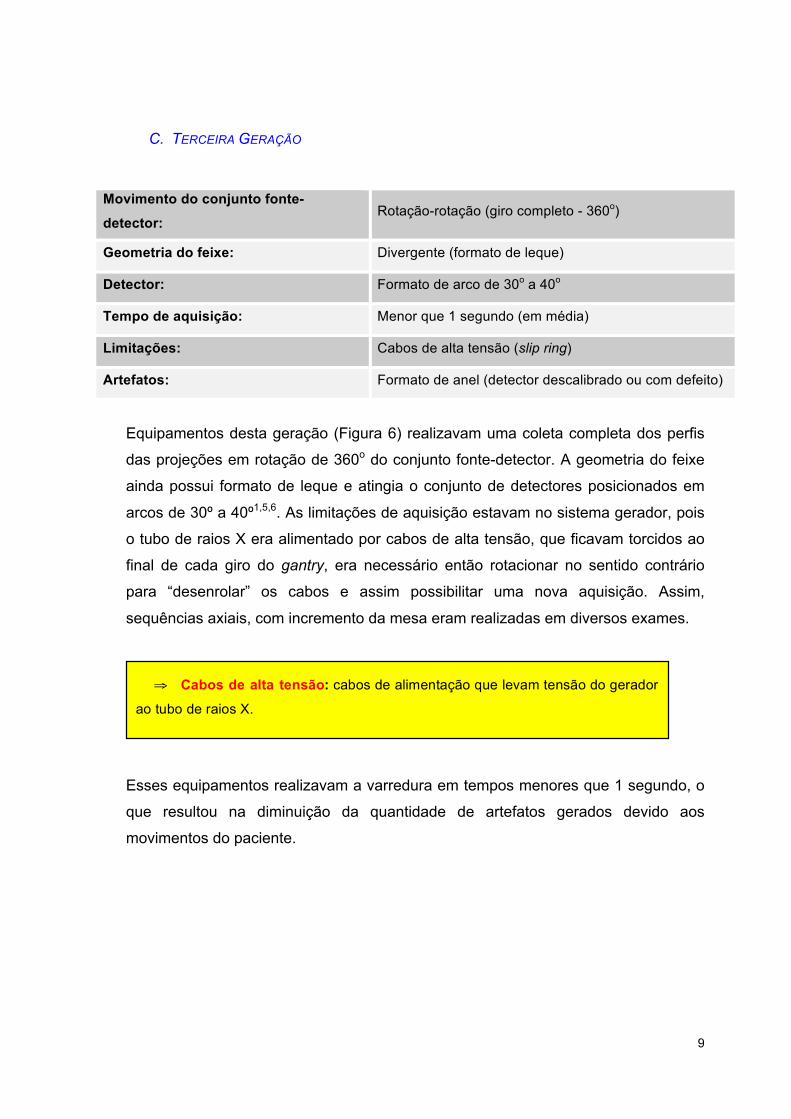
C. TERCEIRA GERAÇÃO
Movimento do conjunto fonte-
detector: Rotação-rotação (giro completo - 360o)
Geometria do feixe: Divergente (formato de leque)
Detector: Formato de arco de 30o a 40o
Tempo de aquisição: Menor que 1 segundo (em média)
Limitações: Cabos de alta tensão (slip ring)
Artefatos: Formato de anel (detector descalibrado ou com defeito)
Equipamentos desta geração (Figura 6) realizavam uma coleta completa dos perfis
das projeções em rotação de 360o do conjunto fonte-detector. A geometria do feixe
ainda possui formato de leque e atingia o conjunto de detectores posicionados em
arcos de 30º a 40º1,5,6. As limitações de aquisição estavam no sistema gerador, pois
o tubo de raios X era alimentado por cabos de alta tensão, que ficavam torcidos ao
final de cada giro do gantry, era necessário então rotacionar no sentido contrário
para “desenrolar” os cabos e assim possibilitar uma nova aquisição. Assim,
sequências axiais, com incremento da mesa eram realizadas em diversos exames.
Esses equipamentos realizavam a varredura em tempos menores que 1 segundo, o
que resultou na diminuição da quantidade de artefatos gerados devido aos
movimentos do paciente.
⇒ Cabos de alta tensão: cabos de alimentação que levam tensão do gerador
ao tubo de raios X.
10
Figura 6 Equipamento de tomografia de 3ª geração
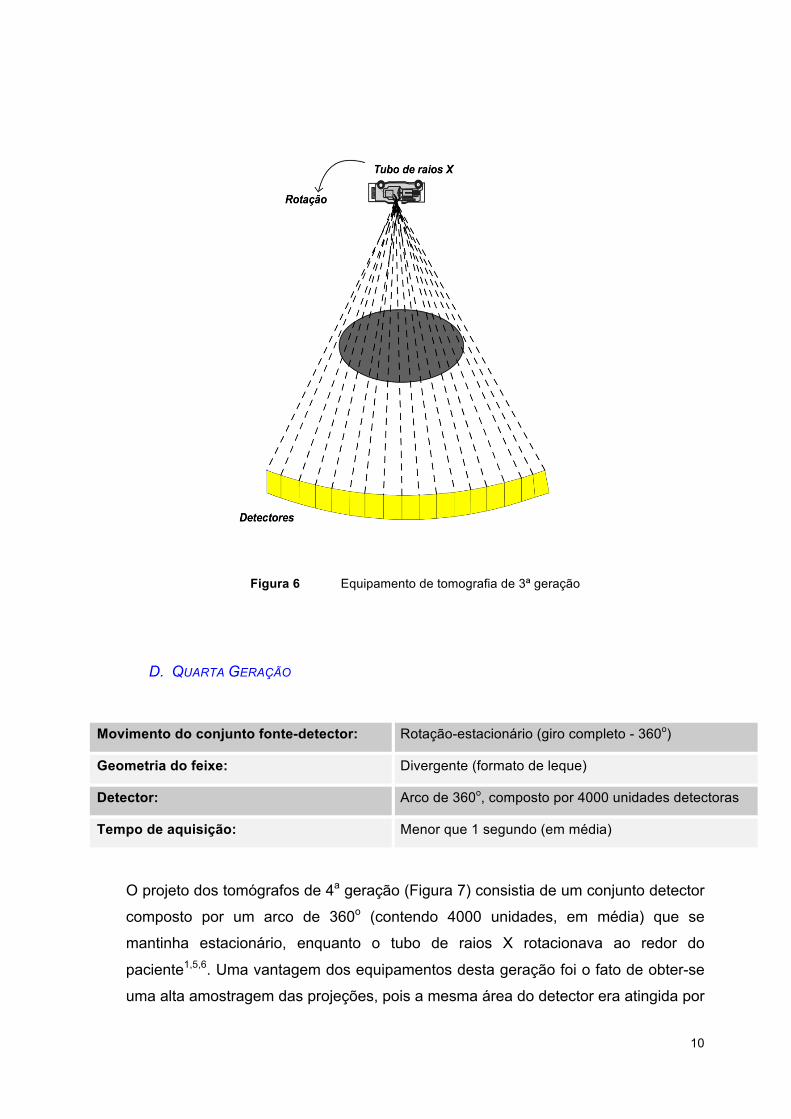
D. QUARTA GERAÇÃO
Movimento do conjunto fonte-detector: Rotação-estacionário (giro completo - 360o)
Geometria do feixe: Divergente (formato de leque)
Detector: Arco de 360o, composto por 4000 unidades detectoras
Tempo de aquisição: Menor que 1 segundo (em média)
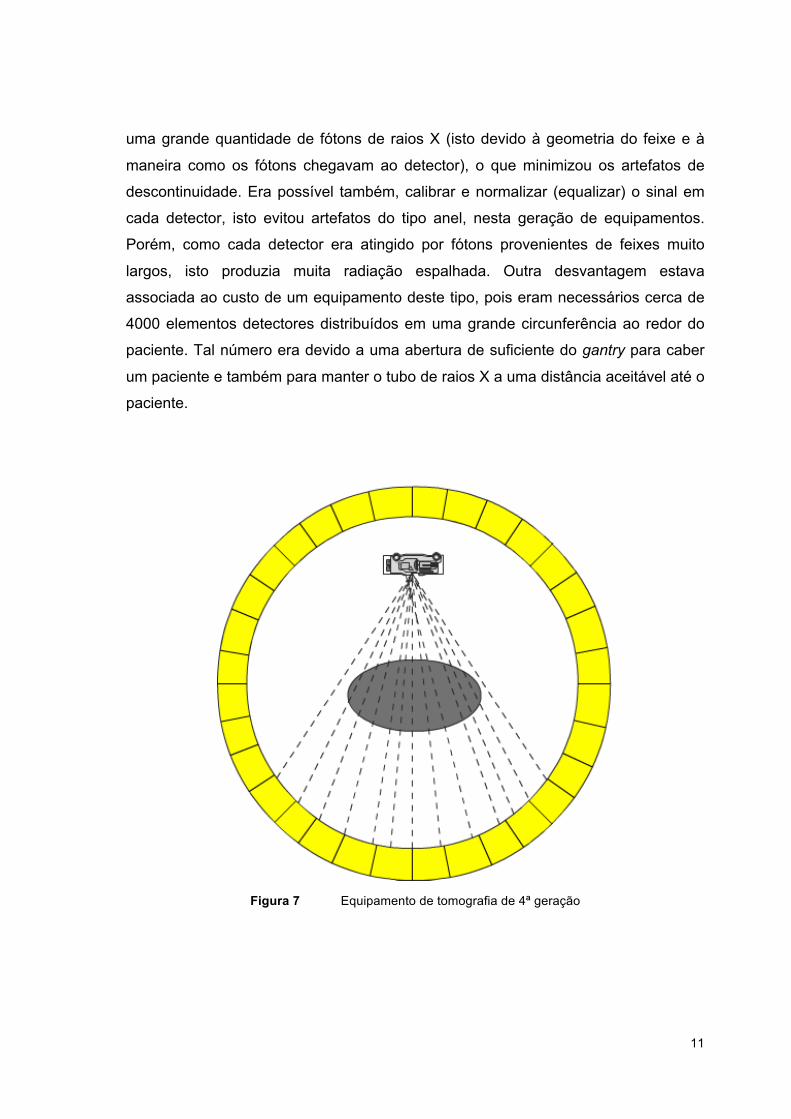
O projeto dos tomógrafos de 4a geração (Figura 7) consistia de um conjunto detector
composto por um arco de 360o (contendo 4000 unidades, em média) que se
mantinha estacionário, enquanto o tubo de raios X rotacionava ao redor do
paciente1,5,6. Uma vantagem dos equipamentos desta geração foi o fato de obter-se
uma alta amostragem das projeções, pois a mesma área do detector era atingida por
11
uma grande quantidade de fótons de raios X (isto devido à geometria do feixe e à
maneira como os fótons chegavam ao detector), o que minimizou os artefatos de
descontinuidade. Era possível também, calibrar e normalizar (equalizar) o sinal em
cada detector, isto evitou artefatos do tipo anel, nesta geração de equipamentos.
Porém, como cada detector era atingido por fótons provenientes de feixes muito
largos, isto produzia muita radiação espalhada. Outra desvantagem estava
associada ao custo de um equipamento deste tipo, pois eram necessários cerca de
4000 elementos detectores distribuídos em uma grande circunferência ao redor do
paciente. Tal número era devido a uma abertura de suficiente do gantry para caber
um paciente e também para manter o tubo de raios X a uma distância aceitável até o
paciente.
Figura 7 Equipamento de tomografia de 4ª geração

12
E. QUINTA GERAÇÃO – EBCT
Movimento do conjunto fonte-
detector: Estacionário-estacionário
Geometria do feixe: Feixe de elétrons – fótons em leque
Detector: Anéis de tungstênio
Tempo de aquisição: 50 milissegundos
Aplicação Exames cardíacos
Os tomógrafos desta geração foram construídos entre 1980 e 1984 com a finalidade
de aplicação em exames cardíacos. Os tomógrafos por feixe de elétrons (do inglês:
electron beam computer tomography – EBCT) eram capazes de obter imagens do
coração praticamente sem movimento, pois conseguiam adquirir imagens em 50
milissegundos minimizando assim artefatos de movimento, inerentes às imagens
cardíacas. Nestes equipamentos, a rotação da fonte era obtida por meio de campos
magnéticos, atingindo anéis de tungstênio, gerando radiação X. Os fótons de raios X
atravessavam o paciente e eram capturados por detectores que estavam
posicionados em oposição aos anéis de tungstênio. Neste sistema, tanto a fonte
(anéis-alvo) quanto os detectores eram estacionários (Figura 8).
Figura 8 Equipamento de tomografia de 5ª geração
13
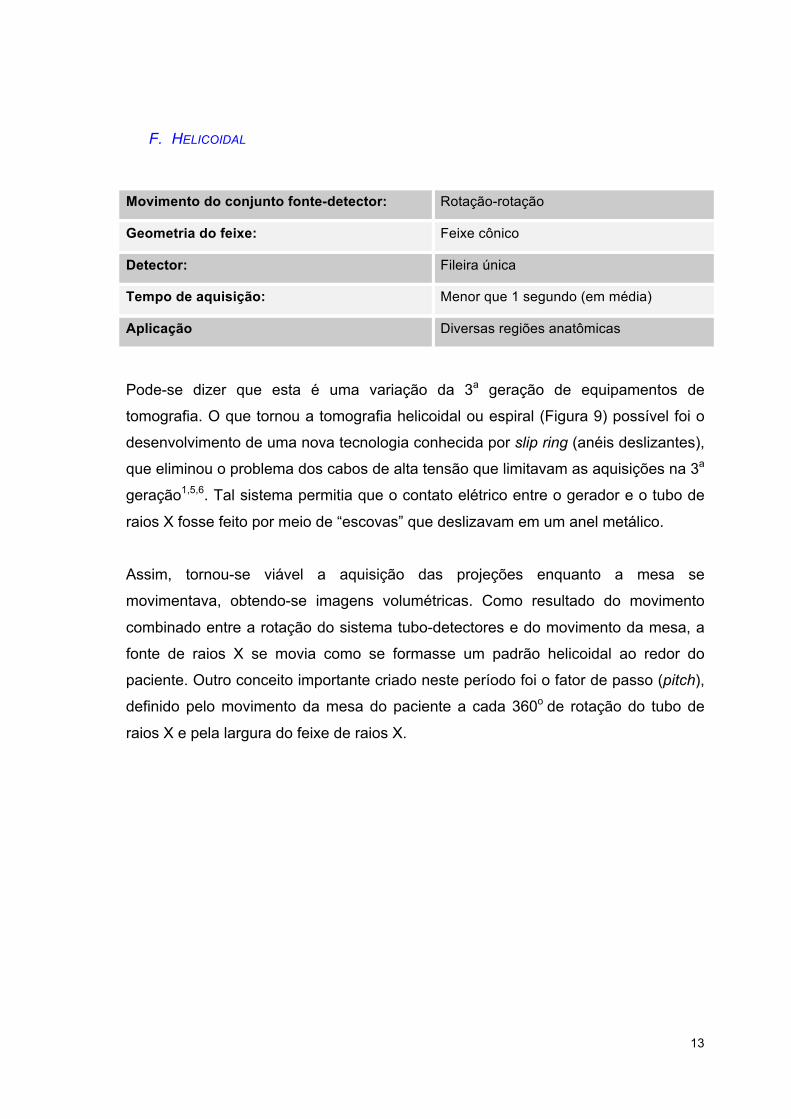
F. HELICOIDAL
Movimento do conjunto fonte-detector: Rotação-rotação
Geometria do feixe: Feixe cônico
Detector: Fileira única
Tempo de aquisição: Menor que 1 segundo (em média)
Aplicação Diversas regiões anatômicas
Pode-se dizer que esta é uma variação da 3a geração de equipamentos de
tomografia. O que tornou a tomografia helicoidal ou espiral (Figura 9) possível foi o
desenvolvimento de uma nova tecnologia conhecida por slip ring (anéis deslizantes),
que eliminou o problema dos cabos de alta tensão que limitavam as aquisições na 3a
geração1,5,6. Tal sistema permitia que o contato elétrico entre o gerador e o tubo de
raios X fosse feito por meio de “escovas” que deslizavam em um anel metálico.
Assim, tornou-se viável a aquisição das projeções enquanto a mesa se
movimentava, obtendo-se imagens volumétricas. Como resultado do movimento
combinado entre a rotação do sistema tubo-detectores e do movimento da mesa, a
fonte de raios X se movia como se formasse um padrão helicoidal ao redor do
paciente. Outro conceito importante criado neste período foi o fator de passo (pitch),
definido pelo movimento da mesa do paciente a cada 360o de rotação do tubo de
raios X e pela largura do feixe de raios X.
14
Figura 9 Equipamento de tomografia helicoidal
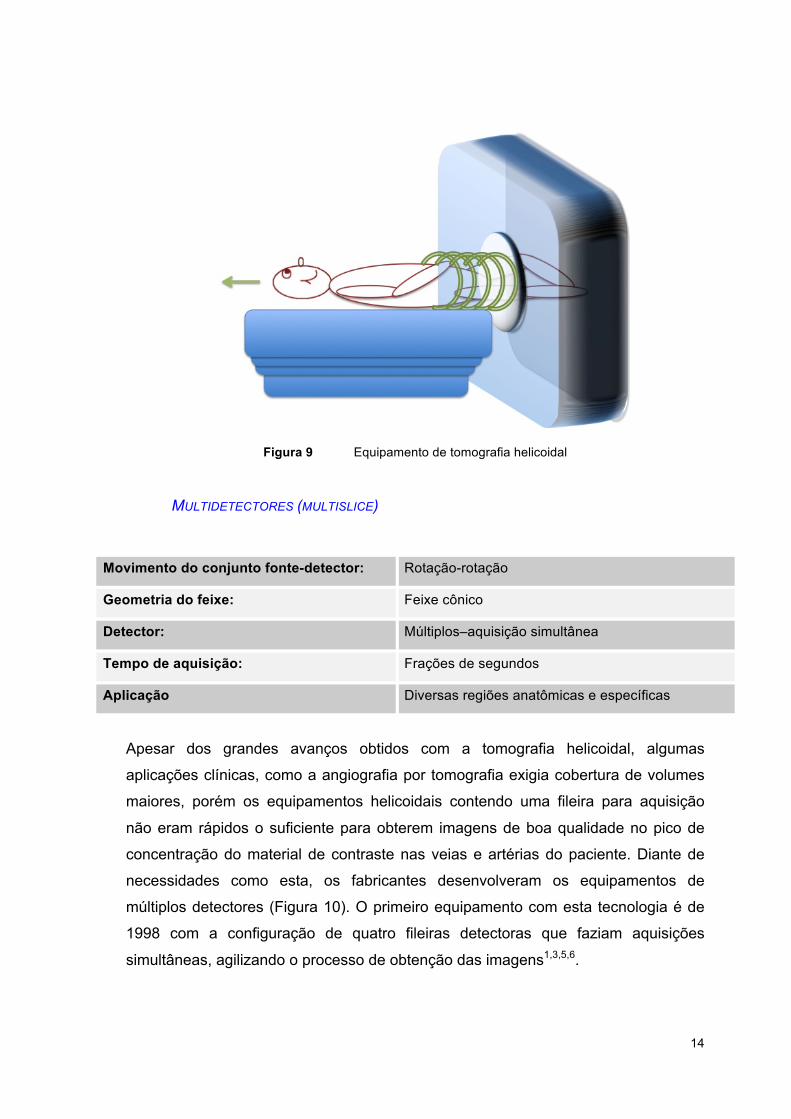
MULTIDETECTORES (MULTISLICE)
Movimento do conjunto fonte-detector: Rotação-rotação
Geometria do feixe: Feixe cônico
Detector: Múltiplos–aquisição simultânea
Tempo de aquisição: Frações de segundos
Aplicação Diversas regiões anatômicas e específicas
Apesar dos grandes avanços obtidos com a tomografia helicoidal, algumas
aplicações clínicas, como a angiografia por tomografia exigia cobertura de volumes
maiores, porém os equipamentos helicoidais contendo uma fileira para aquisição
não eram rápidos o suficiente para obterem imagens de boa qualidade no pico de
concentração do material de contraste nas veias e artérias do paciente. Diante de
necessidades como esta, os fabricantes desenvolveram os equipamentos de
múltiplos detectores (Figura 10). O primeiro equipamento com esta tecnologia é de
1998 com a configuração de quatro fileiras detectoras que faziam aquisições
simultâneas, agilizando o processo de obtenção das imagens1,3,5,6.
15
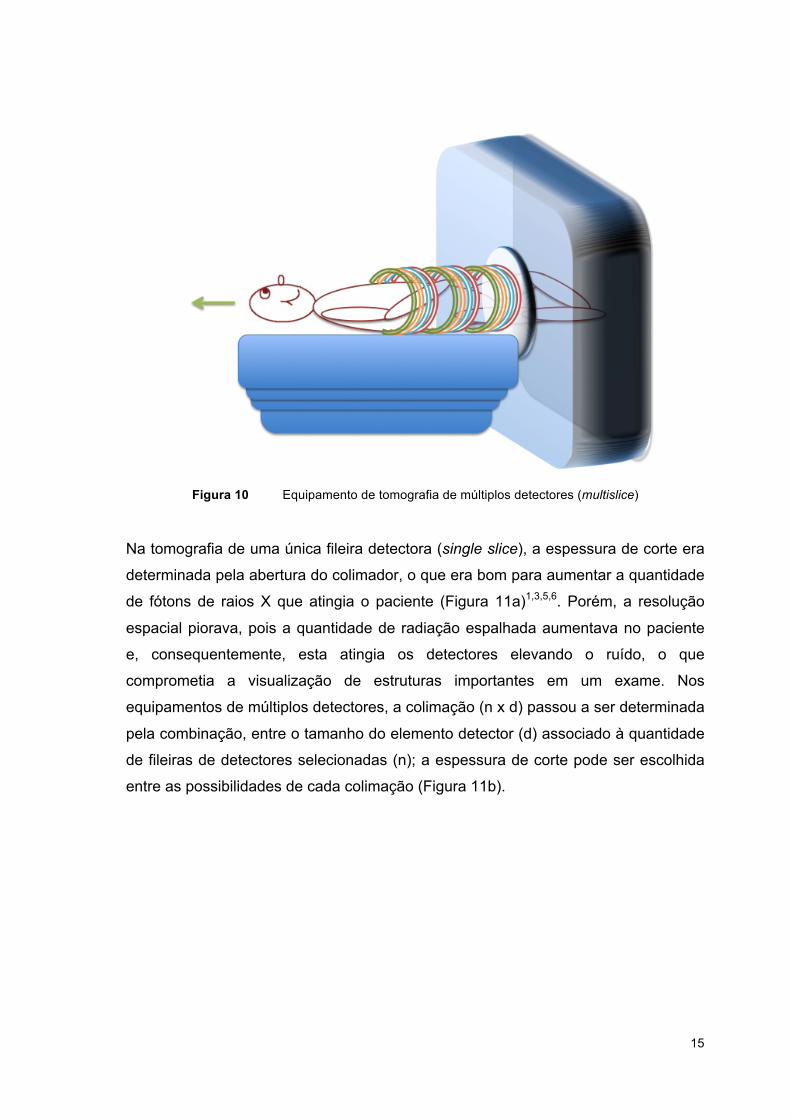
Figura 10 Equipamento de tomografia de múltiplos detectores (multislice)
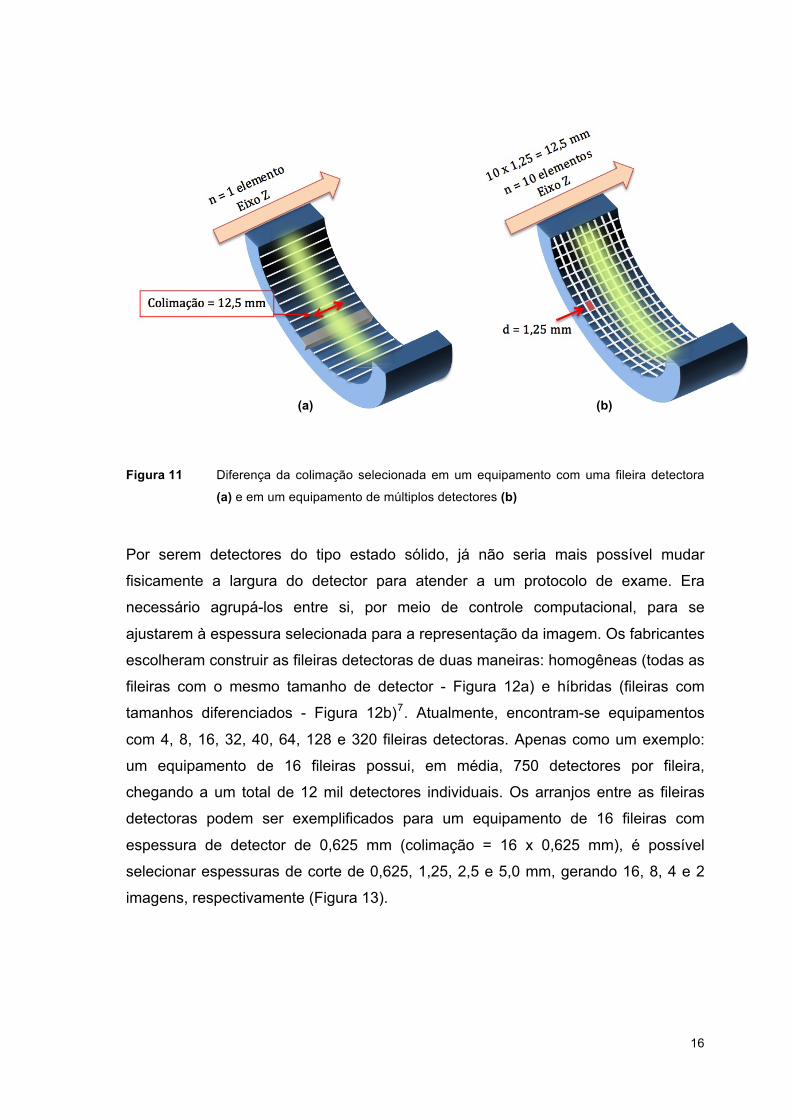
Na tomografia de uma única fileira detectora (single slice), a espessura de corte era
determinada pela abertura do colimador, o que era bom para aumentar a quantidade
de fótons de raios X que atingia o paciente (Figura 11a)1,3,5,6. Porém, a resolução
espacial piorava, pois a quantidade de radiação espalhada aumentava no paciente
e, consequentemente, esta atingia os detectores elevando o ruído, o que
comprometia a visualização de estruturas importantes em um exame. Nos
equipamentos de múltiplos detectores, a colimação (n x d) passou a ser determinada
pela combinação, entre o tamanho do elemento detector (d) associado à quantidade
de fileiras de detectores selecionadas (n); a espessura de corte pode ser escolhida
entre as possibilidades de cada colimação (Figura 11b).
16
Figura 11 Diferença da colimação selecionada em um equipamento com uma fileira detectora
(a) e em um equipamento de múltiplos detectores (b)
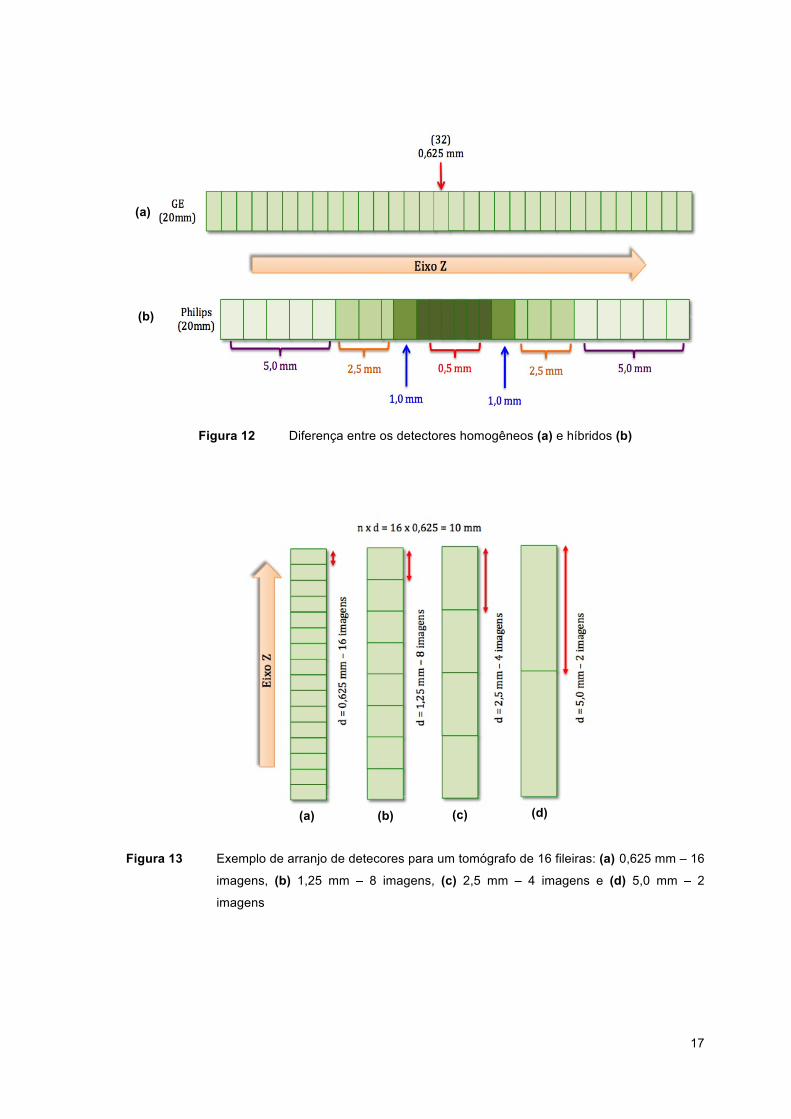
Por serem detectores do tipo estado sólido, já não seria mais possível mudar
fisicamente a largura do detector para atender a um protocolo de exame. Era
necessário agrupá-los entre si, por meio de controle computacional, para se
ajustarem à espessura selecionada para a representação da imagem. Os fabricantes
escolheram construir as fileiras detectoras de duas maneiras: homogêneas (todas as
fileiras com o mesmo tamanho de detector - Figura 12a) e híbridas (fileiras com
tamanhos diferenciados - Figura 12b)7. Atualmente, encontram-se equipamentos
com 4, 8, 16, 32, 40, 64, 128 e 320 fileiras detectoras. Apenas como um exemplo:
um equipamento de 16 fileiras possui, em média, 750 detectores por fileira,
chegando a um total de 12 mil detectores individuais. Os arranjos entre as fileiras
detectoras podem ser exemplificados para um equipamento de 16 fileiras com
espessura de detector de 0,625 mm (colimação = 16 x 0,625 mm), é possível
selecionar espessuras de corte de 0,625, 1,25, 2,5 e 5,0 mm, gerando 16, 8, 4 e 2
imagens, respectivamente (Figura 13).
(a) (b)
17
Figura 12 Diferença entre os detectores homogêneos (a) e híbridos (b)
Figura 13 Exemplo de arranjo de detecores para um tomógrafo de 16 fileiras: (a) 0,625 mm – 16
imagens, (b) 1,25 mm – 8 imagens, (c) 2,5 mm – 4 imagens e (d) 5,0 mm – 2
imagens
(a)
(b)
(a) (b) (c) (d)
18
2 COMPONENTES DO EQUIPAMENTO DE TOMOGRAFIA
Os vários componentes dos equipamentos de tomografia computadorizada são
apresentados a seguir:
A. GANTRY
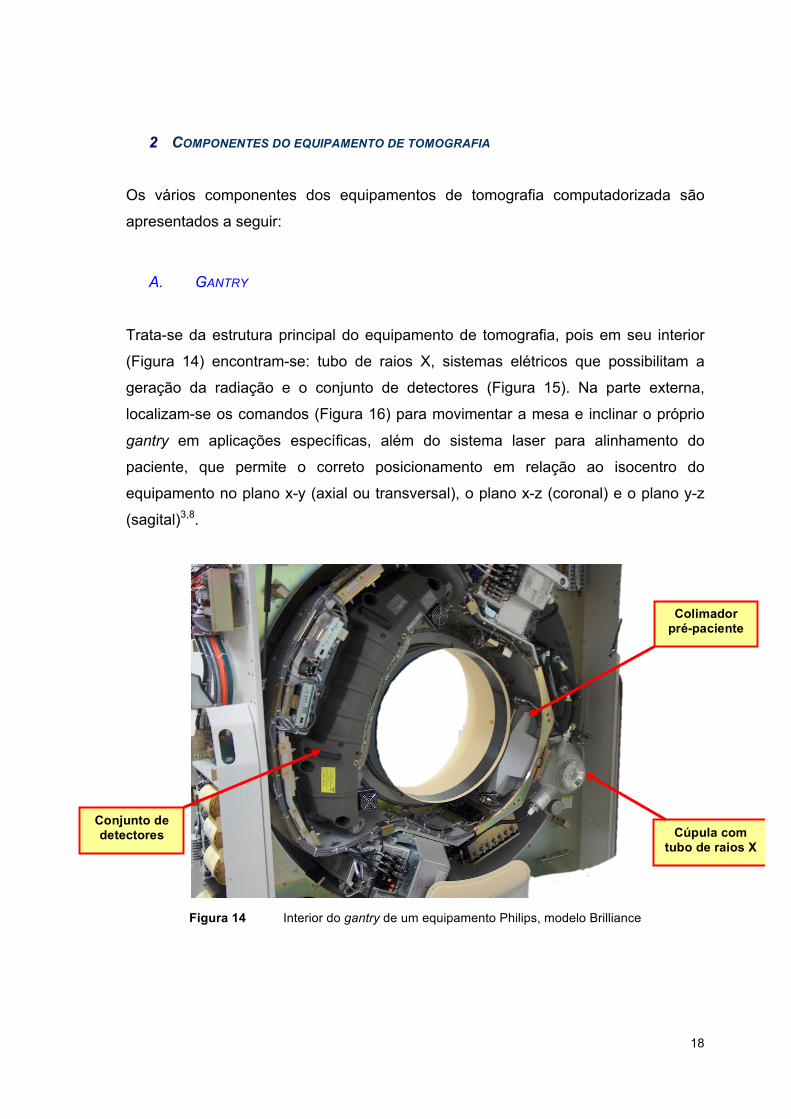
Trata-se da estrutura principal do equipamento de tomografia, pois em seu interior
(Figura 14) encontram-se: tubo de raios X, sistemas elétricos que possibilitam a
geração da radiação e o conjunto de detectores (Figura 15). Na parte externa,
localizam-se os comandos (Figura 16) para movimentar a mesa e inclinar o próprio
gantry em aplicações específicas, além do sistema laser para alinhamento do
paciente, que permite o correto posicionamento em relação ao isocentro do
equipamento no plano x-y (axial ou transversal), o plano x-z (coronal) e o plano y-z
(sagital)3,8.
Figura 14 Interior do gantry de um equipamento Philips, modelo Brilliance
Conjunto de detectores Cúpula com
tubo de raios X
Colimador pré-paciente
19
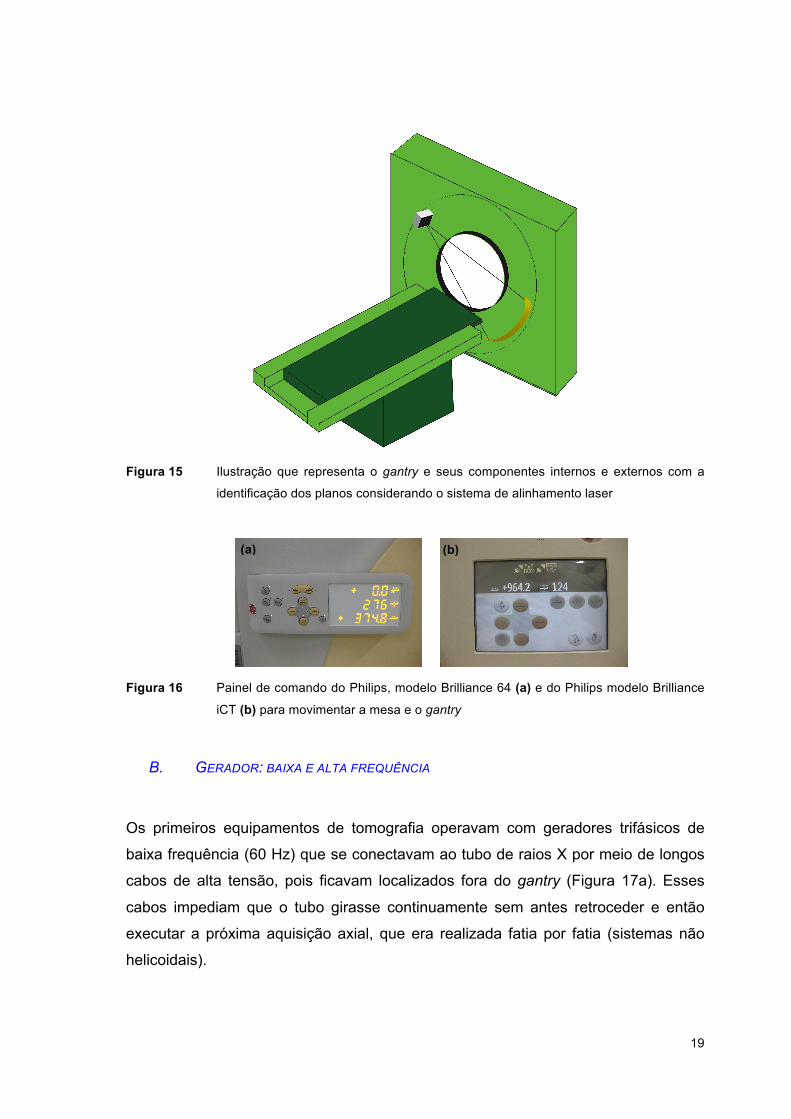
Figura 15 Ilustração que representa o gantry e seus componentes internos e externos com a
identificação dos planos considerando o sistema de alinhamento laser
Figura 16 Painel de comando do Philips, modelo Brilliance 64 (a) e do Philips modelo Brilliance
iCT (b) para movimentar a mesa e o gantry
B. GERADOR: BAIXA E ALTA FREQUÊNCIA
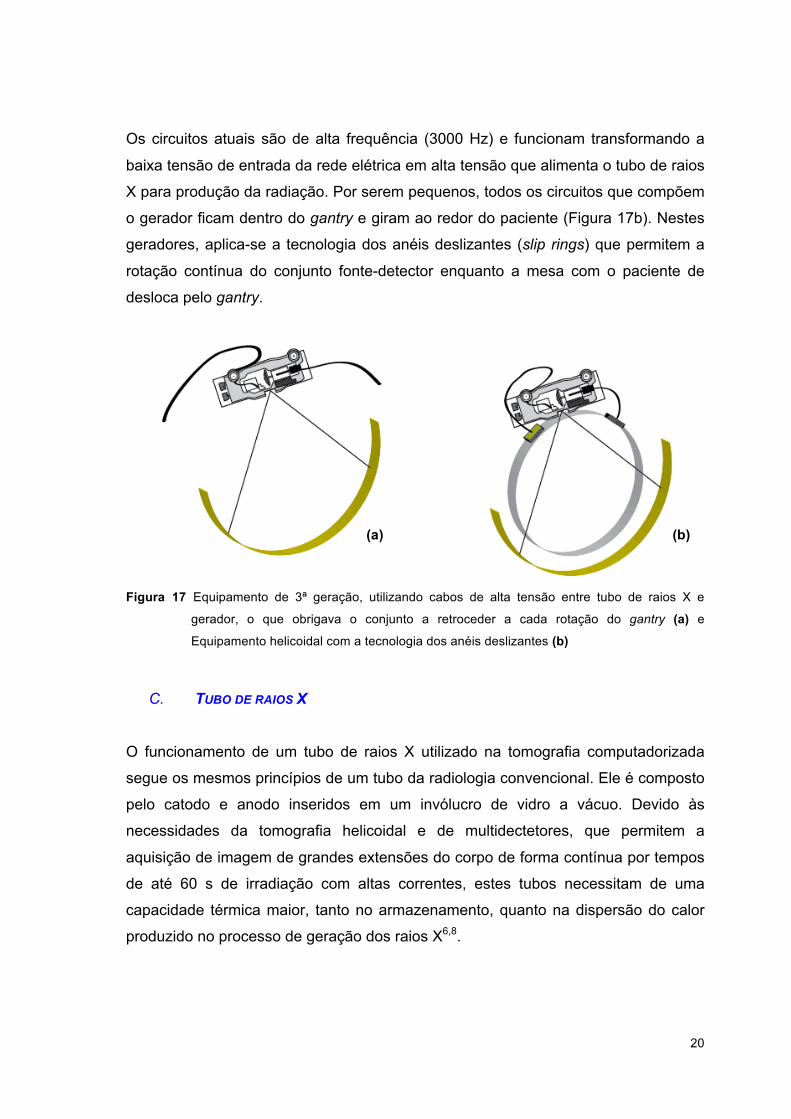
Os primeiros equipamentos de tomografia operavam com geradores trifásicos de
baixa frequência (60 Hz) que se conectavam ao tubo de raios X por meio de longos
cabos de alta tensão, pois ficavam localizados fora do gantry (Figura 17a). Esses
cabos impediam que o tubo girasse continuamente sem antes retroceder e então
executar a próxima aquisição axial, que era realizada fatia por fatia (sistemas não
helicoidais).
(a) (b)
20
Os circuitos atuais são de alta frequência (3000 Hz) e funcionam transformando a
baixa tensão de entrada da rede elétrica em alta tensão que alimenta o tubo de raios
X para produção da radiação. Por serem pequenos, todos os circuitos que compõem
o gerador ficam dentro do gantry e giram ao redor do paciente (Figura 17b). Nestes
geradores, aplica-se a tecnologia dos anéis deslizantes (slip rings) que permitem a
rotação contínua do conjunto fonte-detector enquanto a mesa com o paciente de
desloca pelo gantry.
Figura 17 Equipamento de 3ª geração, utilizando cabos de alta tensão entre tubo de raios X e
gerador, o que obrigava o conjunto a retroceder a cada rotação do gantry (a) e
Equipamento helicoidal com a tecnologia dos anéis deslizantes (b)
C. TUBO DE RAIOS X
O funcionamento de um tubo de raios X utilizado na tomografia computadorizada
segue os mesmos princípios de um tubo da radiologia convencional. Ele é composto
pelo catodo e anodo inseridos em um invólucro de vidro a vácuo. Devido às
necessidades da tomografia helicoidal e de multidectetores, que permitem a
aquisição de imagem de grandes extensões do corpo de forma contínua por tempos
de até 60 s de irradiação com altas correntes, estes tubos necessitam de uma
capacidade térmica maior, tanto no armazenamento, quanto na dispersão do calor
produzido no processo de geração dos raios X6,8.
(a) (b)
21
Os tubos convencionais de vidro (borosilicato) que garantiam o bom isolamento
térmico e elétrico deram lugar a tubos com revestimento metálicos e isolantes
cerâmicos entre o anodo e catodo. Com isso, anodos mais espessos e maiores -
diâmetro de 200 mm comparados aos 120 mm dos anodos convencionais - foram
construídos melhorando a relação de troca de calor. Outra inovação foi a utilização
de novos materiais para o anodo, a antiga composição possuía um base de titânio,
zircônio e molibdênio, com uma pista de ponto focal contendo 10% de rênio e 90%
de tungstênio. Porém, todo este conjunto era muito pesado e foi substituído por uma
base de grafite, que tem uma capacidade dez vezes maior que o tungstênio para
dissipar o calor e por ser mais leve, pode ser utilizado na tomografia helicoidal, a
pista do ponto focal permaneceu a mesma. A capacidade térmica de um tubo de
raios X para tomografia é da ordem de 8 MHU e a taxa de dissipação é de
1 MHU/min. A vida útil de um tubo com essa tecnologia pode variar de 10 mil a 40
mil horas, dependendo dos cuidados com sua utilização, enquanto os tubos
convencionais duram aproximadamente mil horas4,6,8. 9
D. FILTROS
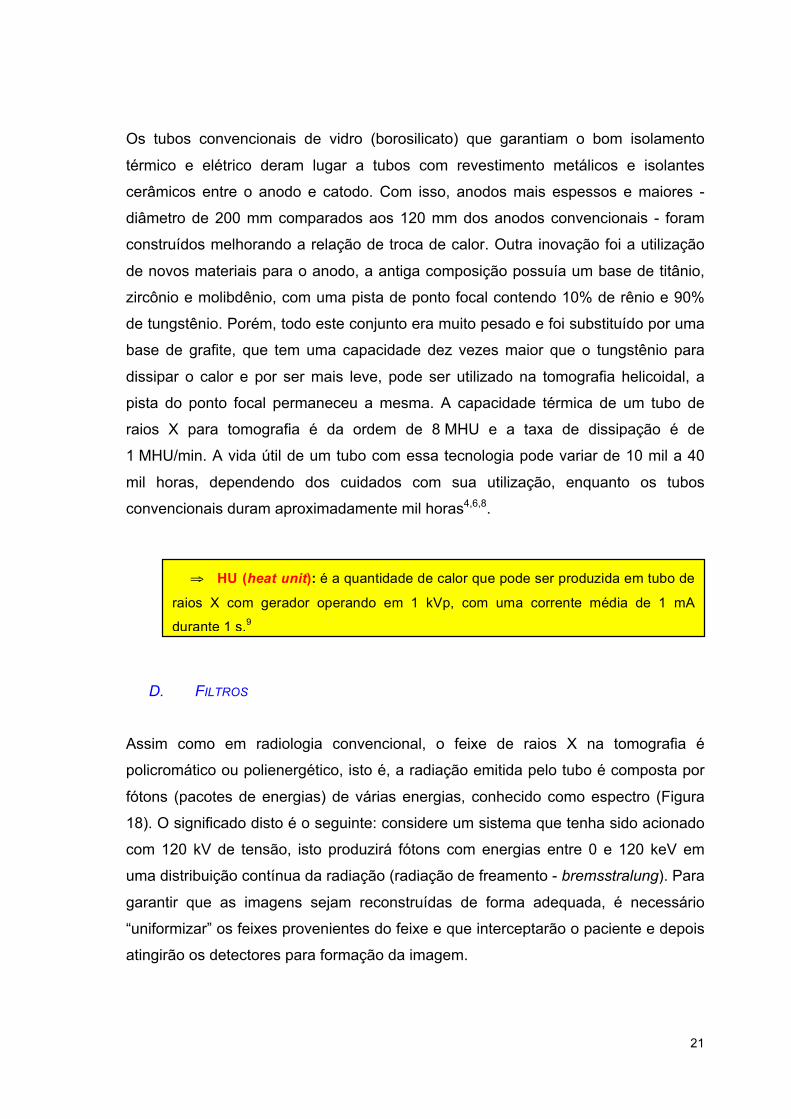
Assim como em radiologia convencional, o feixe de raios X na tomografia é
policromático ou polienergético, isto é, a radiação emitida pelo tubo é composta por
fótons (pacotes de energias) de várias energias, conhecido como espectro (Figura
18). O significado disto é o seguinte: considere um sistema que tenha sido acionado
com 120 kV de tensão, isto produzirá fótons com energias entre 0 e 120 keV em
uma distribuição contínua da radiação (radiação de freamento - bremsstralung). Para
garantir que as imagens sejam reconstruídas de forma adequada, é necessário
“uniformizar” os feixes provenientes do feixe e que interceptarão o paciente e depois
atingirão os detectores para formação da imagem.
⇒ HU (heat unit): é a quantidade de calor que pode ser produzida em tubo de
raios X com gerador operando em 1 kVp, com uma corrente média de 1 mA
durante 1 s.9
22
Figura 18 Espectro de radiação X gerado para 120 kV
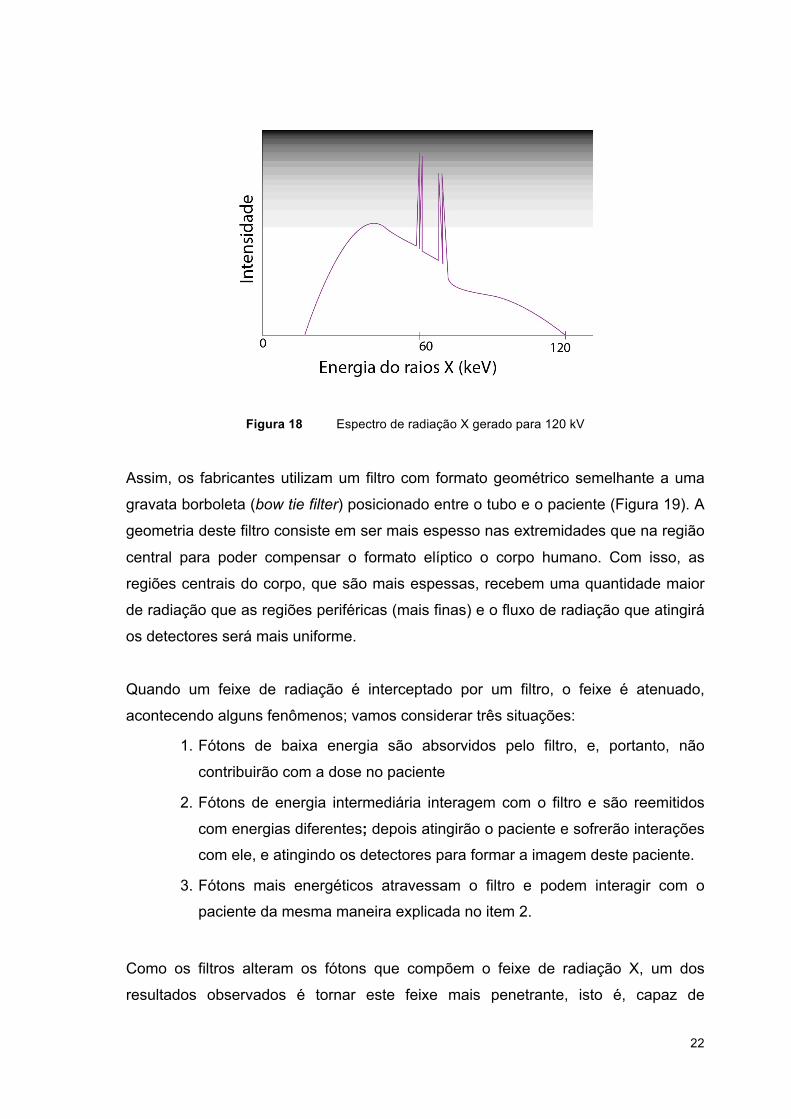
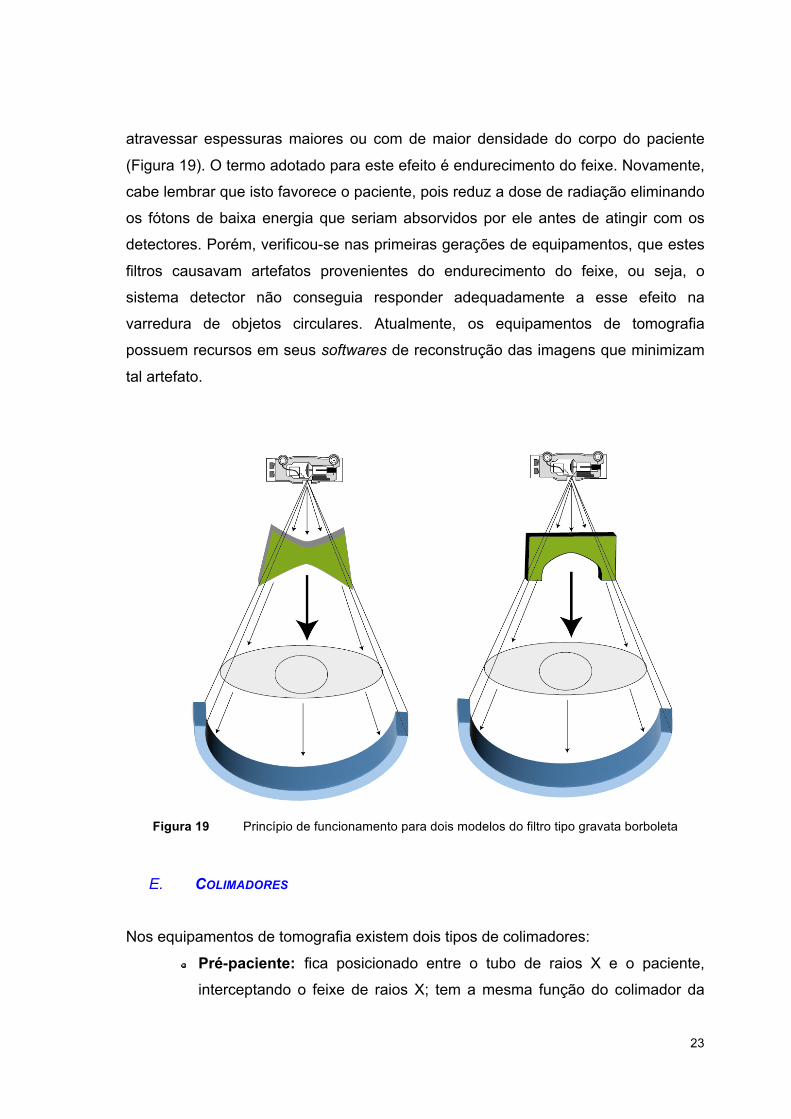
Assim, os fabricantes utilizam um filtro com formato geométrico semelhante a uma
gravata borboleta (bow tie filter) posicionado entre o tubo e o paciente (Figura 19). A
geometria deste filtro consiste em ser mais espesso nas extremidades que na região
central para poder compensar o formato elíptico o corpo humano. Com isso, as
regiões centrais do corpo, que são mais espessas, recebem uma quantidade maior
de radiação que as regiões periféricas (mais finas) e o fluxo de radiação que atingirá
os detectores será mais uniforme.
Quando um feixe de radiação é interceptado por um filtro, o feixe é atenuado,
acontecendo alguns fenômenos; vamos considerar três situações:
1. Fótons de baixa energia são absorvidos pelo filtro, e, portanto, não
contribuirão com a dose no paciente
2. Fótons de energia intermediária interagem com o filtro e são reemitidos
com energias diferentes; depois atingirão o paciente e sofrerão interações
com ele, e atingindo os detectores para formar a imagem deste paciente.
3. Fótons mais energéticos atravessam o filtro e podem interagir com o
paciente da mesma maneira explicada no item 2.
Como os filtros alteram os fótons que compõem o feixe de radiação X, um dos
resultados observados é tornar este feixe mais penetrante, isto é, capaz de
23
atravessar espessuras maiores ou com de maior densidade do corpo do paciente
(Figura 19). O termo adotado para este efeito é endurecimento do feixe. Novamente,
cabe lembrar que isto favorece o paciente, pois reduz a dose de radiação eliminando
os fótons de baixa energia que seriam absorvidos por ele antes de atingir com os
detectores. Porém, verificou-se nas primeiras gerações de equipamentos, que estes
filtros causavam artefatos provenientes do endurecimento do feixe, ou seja, o
sistema detector não conseguia responder adequadamente a esse efeito na
varredura de objetos circulares. Atualmente, os equipamentos de tomografia
possuem recursos em seus softwares de reconstrução das imagens que minimizam
tal artefato.
Figura 19 Princípio de funcionamento para dois modelos do filtro tipo gravata borboleta
E. COLIMADORES
Nos equipamentos de tomografia existem dois tipos de colimadores:
Pré-paciente: fica posicionado entre o tubo de raios X e o paciente,
interceptando o feixe de raios X; tem a mesma função do colimador da
24
radiologia convencional, reduzir a dose no paciente e melhorar a
qualidade da imagem. Nos equipamentos com uma fileira detectora têm,
ainda, a função de definir a espessura do corte tomográfico.
Pós-paciente (pré-detector): tem a finalidade de minimizar a radiação
espalhada pelo paciente.
F. TIPOS DE DETECTORES
Após interagir com o paciente, os fótons de radiação sensibilizarão os detectores no
equipamento de tomografia e serão quantificados e processados por um sistema
eletrônico associado a estes detectores. Queremos apresentar algumas
características importantes dos detectores e descrever alguns tipos utilizados em
tomografia computadorizada. Para isso, começaremos falando algumas destas
características intrínsecas10:
Estabilidade: é a constância ou consistência com a qual um detector
responde. Nos processos de interação da radiação com os detectores,
serão necessárias calibrações frequentemente se não houver estabilidade
do sistema;
Eficiência: é a capacidade que um sistema detector tem para capturar,
absorver e converter os fótons de raios X em sinais elétricos;
Faixa dinâmica: descreve a razão entre o maior e o menor sinal capaz de
ser medido pelo sistema detector, por exemplo, em tomografia esta razão
é de 1 milhão para 1, o que significa que estes detectores são capazes de
diferenciar sinais de 1 mA e de 1 nA.
Tempo de resposta: refere-se à rapidez com a qual o detector consegue
diferenciar dois eventos (duas interações) da radiação de forma distinta,
isto é perceber uma interação, quantificá-la e se recuperar para um novo
processo. Esses tempos são necessariamente muito curtos
(milissegundos) para evitar problemas de emissão pós-luminescência e
empilhamento
25
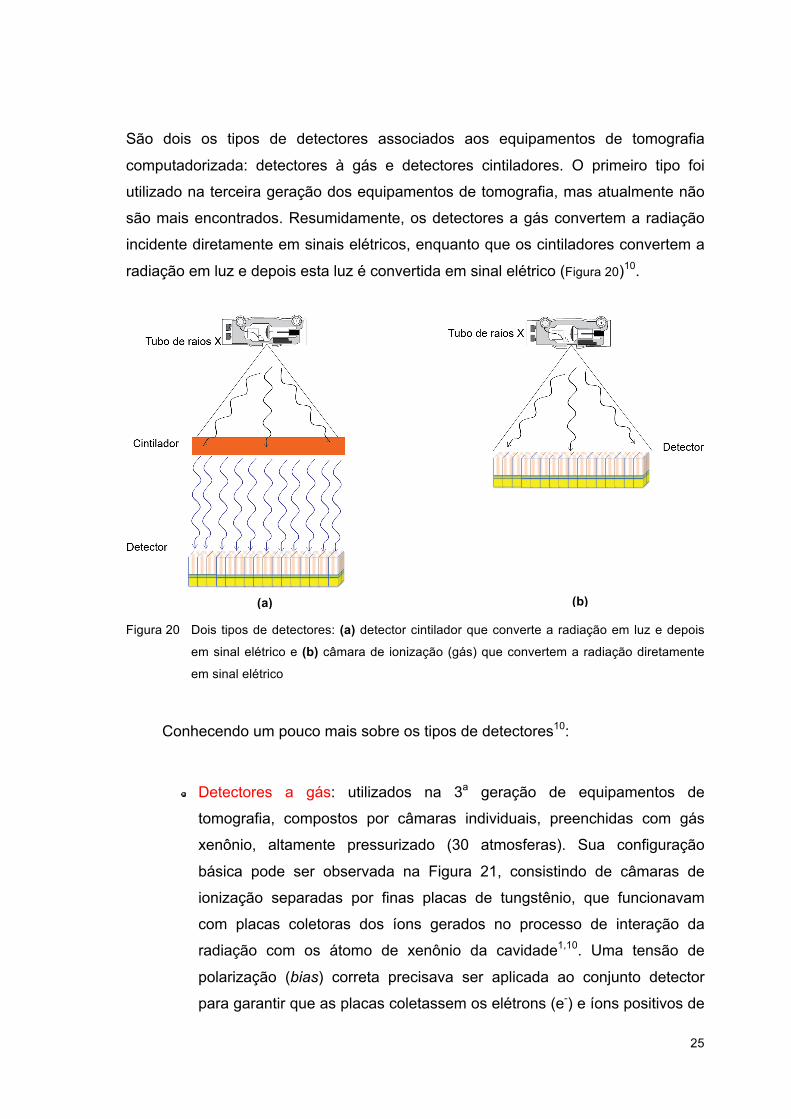
São dois os tipos de detectores associados aos equipamentos de tomografia
computadorizada: detectores à gás e detectores cintiladores. O primeiro tipo foi
utilizado na terceira geração dos equipamentos de tomografia, mas atualmente não
são mais encontrados. Resumidamente, os detectores a gás convertem a radiação
incidente diretamente em sinais elétricos, enquanto que os cintiladores convertem a
radiação em luz e depois esta luz é convertida em sinal elétrico (Figura 20)10.
Figura 20 Dois tipos de detectores: (a) detector cintilador que converte a radiação em luz e depois
em sinal elétrico e (b) câmara de ionização (gás) que convertem a radiação diretamente
em sinal elétrico
Conhecendo um pouco mais sobre os tipos de detectores10:
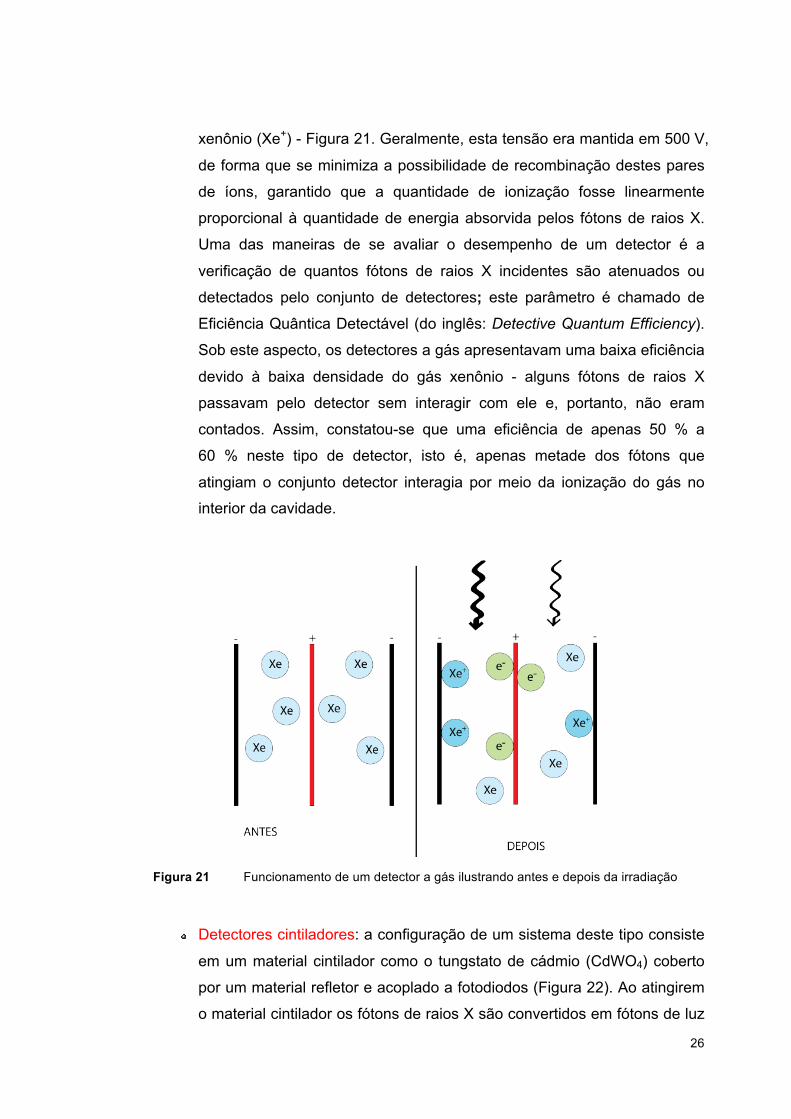
Detectores a gás: utilizados na 3a geração de equipamentos de
tomografia, compostos por câmaras individuais, preenchidas com gás
xenônio, altamente pressurizado (30 atmosferas). Sua configuração
básica pode ser observada na Figura 21, consistindo de câmaras de
ionização separadas por finas placas de tungstênio, que funcionavam
com placas coletoras dos íons gerados no processo de interação da
radiação com os átomo de xenônio da cavidade1,10. Uma tensão de
polarização (bias) correta precisava ser aplicada ao conjunto detector
para garantir que as placas coletassem os elétrons (e-) e íons positivos de
(a) (b)
26
xenônio (Xe+) - Figura 21. Geralmente, esta tensão era mantida em 500 V,
de forma que se minimiza a possibilidade de recombinação destes pares
de íons, garantido que a quantidade de ionização fosse linearmente
proporcional à quantidade de energia absorvida pelos fótons de raios X.
Uma das maneiras de se avaliar o desempenho de um detector é a
verificação de quantos fótons de raios X incidentes são atenuados ou
detectados pelo conjunto de detectores; este parâmetro é chamado de
Eficiência Quântica Detectável (do inglês: Detective Quantum Efficiency).
Sob este aspecto, os detectores a gás apresentavam uma baixa eficiência
devido à baixa densidade do gás xenônio - alguns fótons de raios X
passavam pelo detector sem interagir com ele e, portanto, não eram
contados. Assim, constatou-se que uma eficiência de apenas 50 % a
60 % neste tipo de detector, isto é, apenas metade dos fótons que
atingiam o conjunto detector interagia por meio da ionização do gás no
interior da cavidade.
Figura 21 Funcionamento de um detector a gás ilustrando antes e depois da irradiação
Detectores cintiladores: a configuração de um sistema deste tipo consiste
em um material cintilador como o tungstato de cádmio (CdWO4) coberto
por um material refletor e acoplado a fotodiodos (Figura 22). Ao atingirem
o material cintilador os fótons de raios X são convertidos em fótons de luz
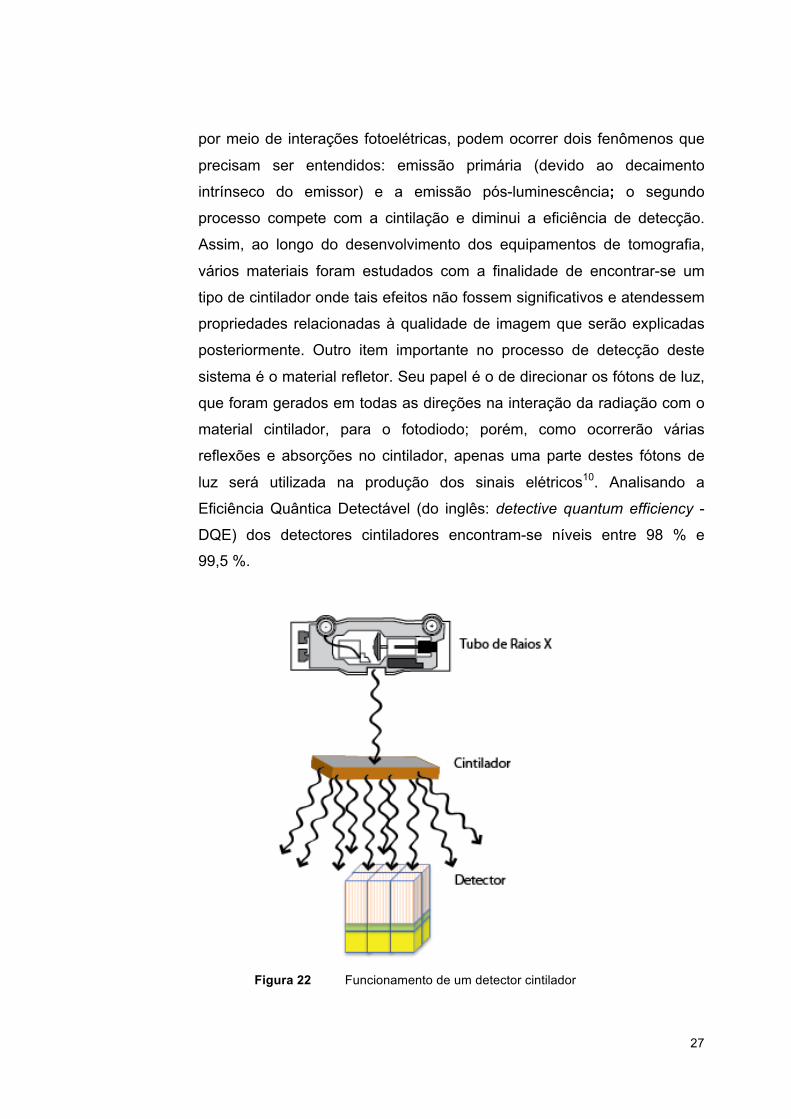
27
por meio de interações fotoelétricas, podem ocorrer dois fenômenos que
precisam ser entendidos: emissão primária (devido ao decaimento
intrínseco do emissor) e a emissão pós-luminescência; o segundo
processo compete com a cintilação e diminui a eficiência de detecção.
Assim, ao longo do desenvolvimento dos equipamentos de tomografia,
vários materiais foram estudados com a finalidade de encontrar-se um
tipo de cintilador onde tais efeitos não fossem significativos e atendessem
propriedades relacionadas à qualidade de imagem que serão explicadas
posteriormente. Outro item importante no processo de detecção deste
sistema é o material refletor. Seu papel é o de direcionar os fótons de luz,
que foram gerados em todas as direções na interação da radiação com o
material cintilador, para o fotodiodo; porém, como ocorrerão várias
reflexões e absorções no cintilador, apenas uma parte destes fótons de
luz será utilizada na produção dos sinais elétricos10. Analisando a
Eficiência Quântica Detectável (do inglês: detective quantum efficiency -
DQE) dos detectores cintiladores encontram-se níveis entre 98 % e
99,5 %.
Figura 22 Funcionamento de um detector cintilador
28
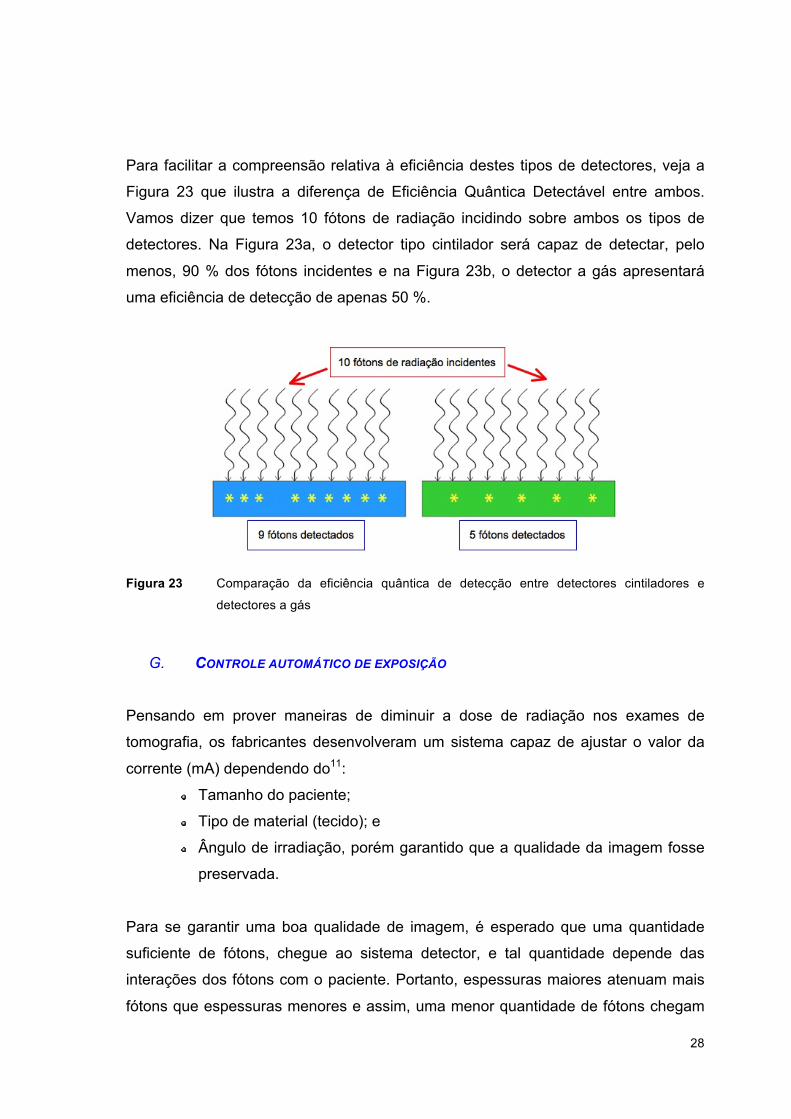
Para facilitar a compreensão relativa à eficiência destes tipos de detectores, veja a
Figura 23 que ilustra a diferença de Eficiência Quântica Detectável entre ambos.
Vamos dizer que temos 10 fótons de radiação incidindo sobre ambos os tipos de
detectores. Na Figura 23a, o detector tipo cintilador será capaz de detectar, pelo
menos, 90 % dos fótons incidentes e na Figura 23b, o detector a gás apresentará
uma eficiência de detecção de apenas 50 %.
Figura 23 Comparação da eficiência quântica de detecção entre detectores cintiladores e
detectores a gás
G. CONTROLE AUTOMÁTICO DE EXPOSIÇÃO
Pensando em prover maneiras de diminuir a dose de radiação nos exames de
tomografia, os fabricantes desenvolveram um sistema capaz de ajustar o valor da
corrente (mA) dependendo do11:
Tamanho do paciente;
Tipo de material (tecido); e
Ângulo de irradiação, porém garantido que a qualidade da imagem fosse
preservada.
Para se garantir uma boa qualidade de imagem, é esperado que uma quantidade
suficiente de fótons, chegue ao sistema detector, e tal quantidade depende das
interações dos fótons com o paciente. Portanto, espessuras maiores atenuam mais
fótons que espessuras menores e assim, uma menor quantidade de fótons chegam
29
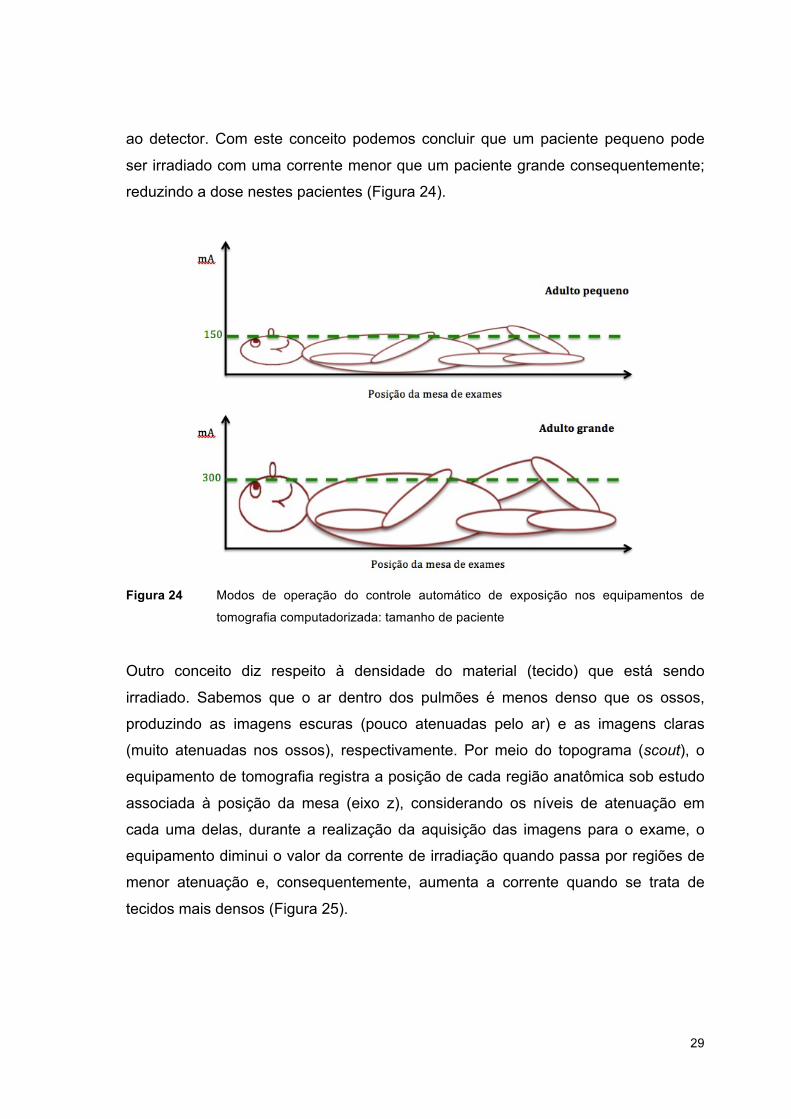
ao detector. Com este conceito podemos concluir que um paciente pequeno pode
ser irradiado com uma corrente menor que um paciente grande consequentemente;
reduzindo a dose nestes pacientes (Figura 24).
Figura 24 Modos de operação do controle automático de exposição nos equipamentos de
tomografia computadorizada: tamanho de paciente
Outro conceito diz respeito à densidade do material (tecido) que está sendo
irradiado. Sabemos que o ar dentro dos pulmões é menos denso que os ossos,
produzindo as imagens escuras (pouco atenuadas pelo ar) e as imagens claras
(muito atenuadas nos ossos), respectivamente. Por meio do topograma (scout), o
equipamento de tomografia registra a posição de cada região anatômica sob estudo
associada à posição da mesa (eixo z), considerando os níveis de atenuação em
cada uma delas, durante a realização da aquisição das imagens para o exame, o
equipamento diminui o valor da corrente de irradiação quando passa por regiões de
menor atenuação e, consequentemente, aumenta a corrente quando se trata de
tecidos mais densos (Figura 25).
30
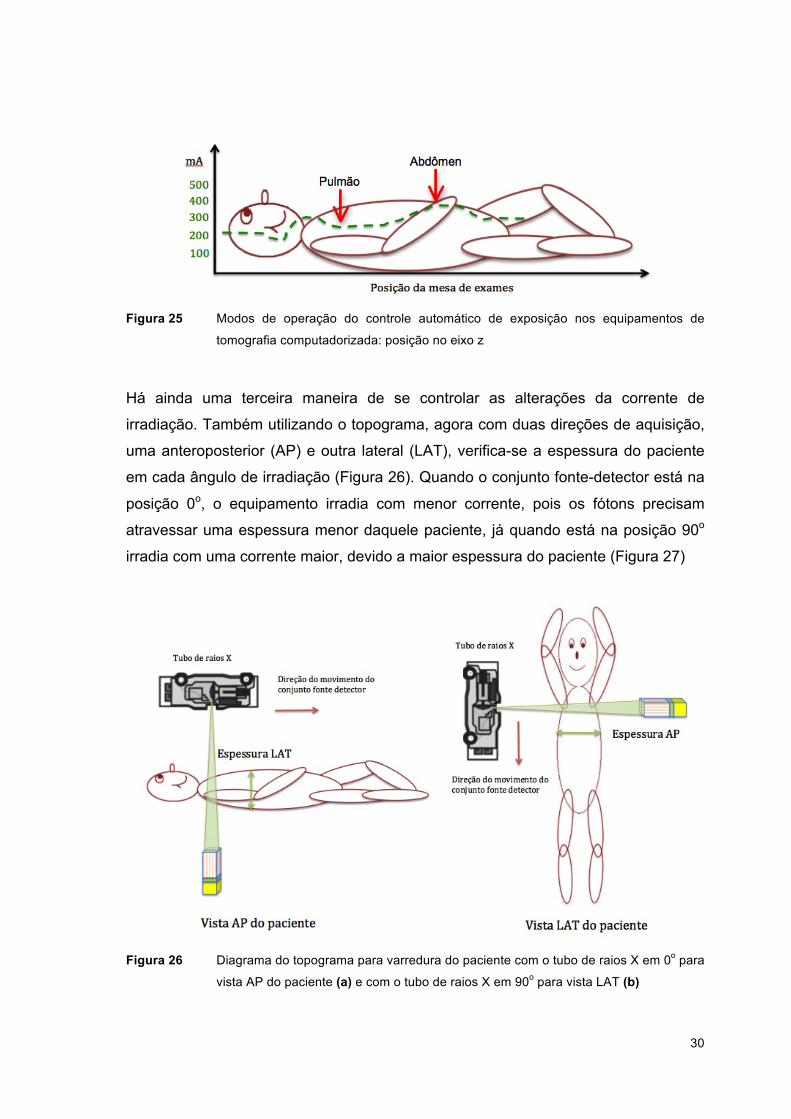
Figura 25 Modos de operação do controle automático de exposição nos equipamentos de
tomografia computadorizada: posição no eixo z
Há ainda uma terceira maneira de se controlar as alterações da corrente de
irradiação. Também utilizando o topograma, agora com duas direções de aquisição,
uma anteroposterior (AP) e outra lateral (LAT), verifica-se a espessura do paciente
em cada ângulo de irradiação (Figura 26). Quando o conjunto fonte-detector está na
posição 0o, o equipamento irradia com menor corrente, pois os fótons precisam
atravessar uma espessura menor daquele paciente, já quando está na posição 90o
irradia com uma corrente maior, devido a maior espessura do paciente (Figura 27)
Figura 26 Diagrama do topograma para varredura do paciente com o tubo de raios X em 0o para
vista AP do paciente (a) e com o tubo de raios X em 90o para vista LAT (b)

31
Figura 27 Modos de operação do controle automático de exposição nos equipamentos de
tomografia computadorizada: variação angular
Na prática, os fabricantes disponibilizam estes recursos de forma combinada, por
exemplo: pode-se corrigir o valor da corrente considerando a posição da mesa no
eixo z e os ângulos de irradiação. Vejamos na Tabela 1 como estes recursos estão
disponíveis nos equipamentos de quatro principais fabricantes:
Tabela 1 Controle automático de exposição dos quatro principais fabricantes de tomografia
Fabricante Tamanho
do paciente Eixo z Variação angular
GE Auto mA Smart mA
Philips DoseRight ACS DoseRight ZDOM DoseRight DDOM
Siemens CARE Dose 4D
Toshiba SUREExposure 3D
32
H. COMANDO DO EQUIPAMENTO
O equipamento de tomografia é controlado por um micro computador que contém os
softwares e hardwares necessários para selecionar todos os parâmetros elétricos,
permite a seleção de posicionamento do paciente, registro do exame e envio das
imagens adquiridas para posterior avaliação dos radiologistas.
Como funciona o comando de um equipamento de tomografia?
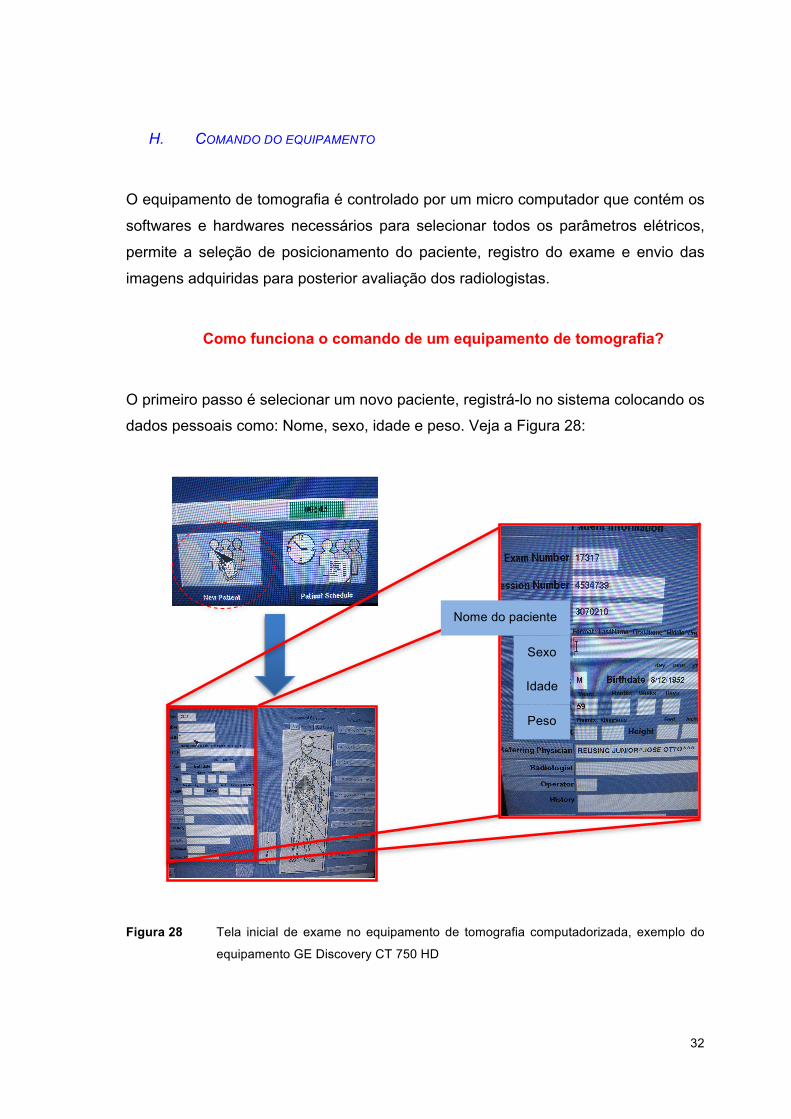
O primeiro passo é selecionar um novo paciente, registrá-lo no sistema colocando os
dados pessoais como: Nome, sexo, idade e peso. Veja a Figura 28:
Figura 28 Tela inicial de exame no equipamento de tomografia computadorizada, exemplo do
equipamento GE Discovery CT 750 HD
Idade
Nome do paciente
Sexo
Peso
33
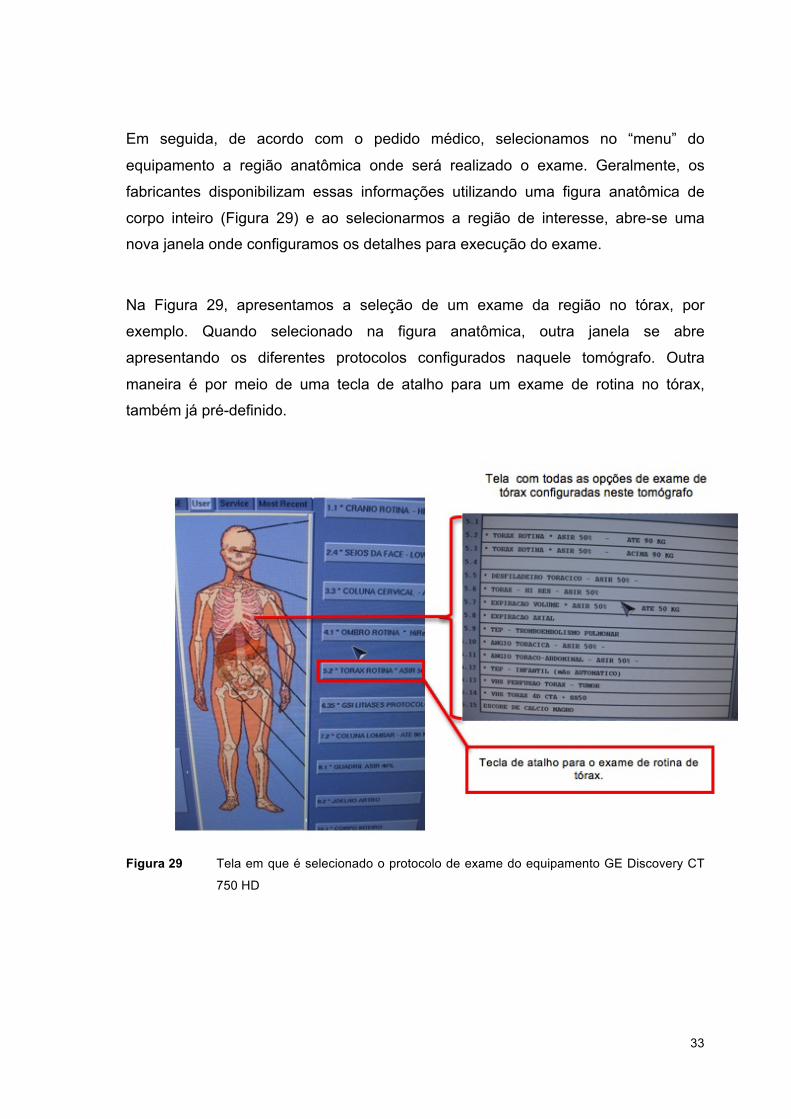
Em seguida, de acordo com o pedido médico, selecionamos no “menu” do
equipamento a região anatômica onde será realizado o exame. Geralmente, os
fabricantes disponibilizam essas informações utilizando uma figura anatômica de
corpo inteiro (Figura 29) e ao selecionarmos a região de interesse, abre-se uma
nova janela onde configuramos os detalhes para execução do exame.
Na Figura 29, apresentamos a seleção de um exame da região no tórax, por
exemplo. Quando selecionado na figura anatômica, outra janela se abre
apresentando os diferentes protocolos configurados naquele tomógrafo. Outra
maneira é por meio de uma tecla de atalho para um exame de rotina no tórax,
também já pré-definido.
Figura 29 Tela em que é selecionado o protocolo de exame do equipamento GE Discovery CT
750 HD
34
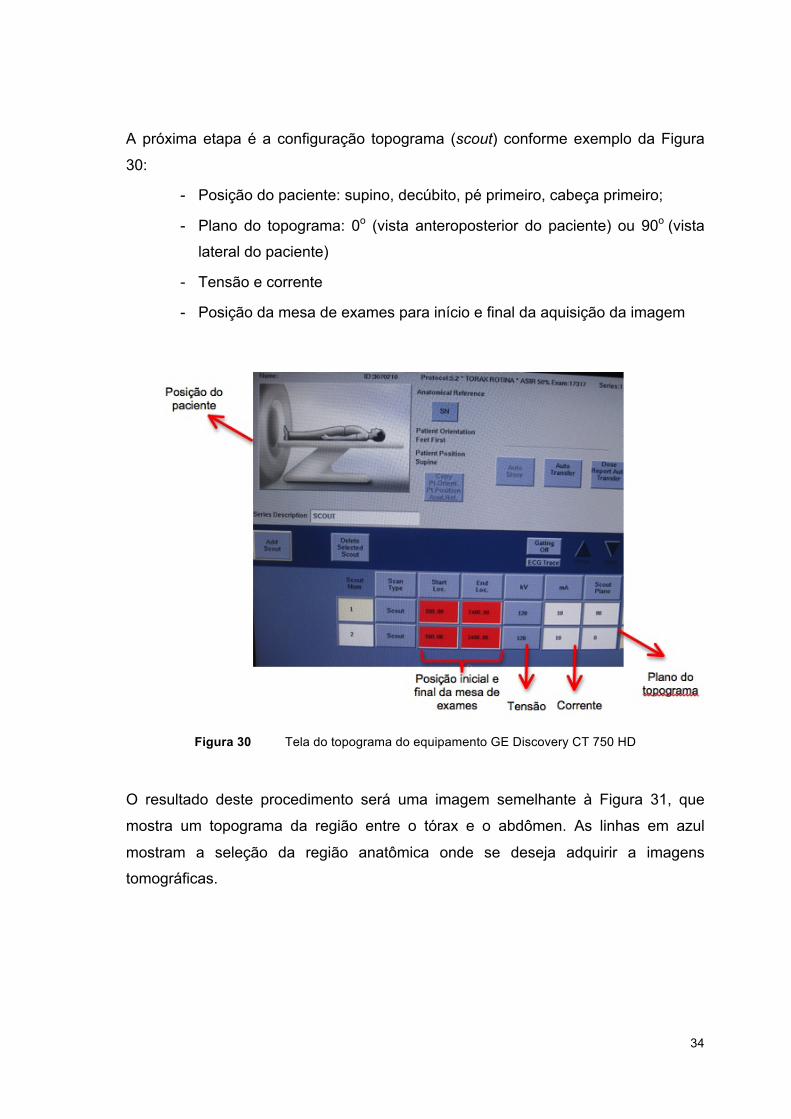
A próxima etapa é a configuração topograma (scout) conforme exemplo da Figura
30:
- Posição do paciente: supino, decúbito, pé primeiro, cabeça primeiro;
- Plano do topograma: 0o (vista anteroposterior do paciente) ou 90o (vista
lateral do paciente)
- Tensão e corrente
- Posição da mesa de exames para início e final da aquisição da imagem
Figura 30 Tela do topograma do equipamento GE Discovery CT 750 HD
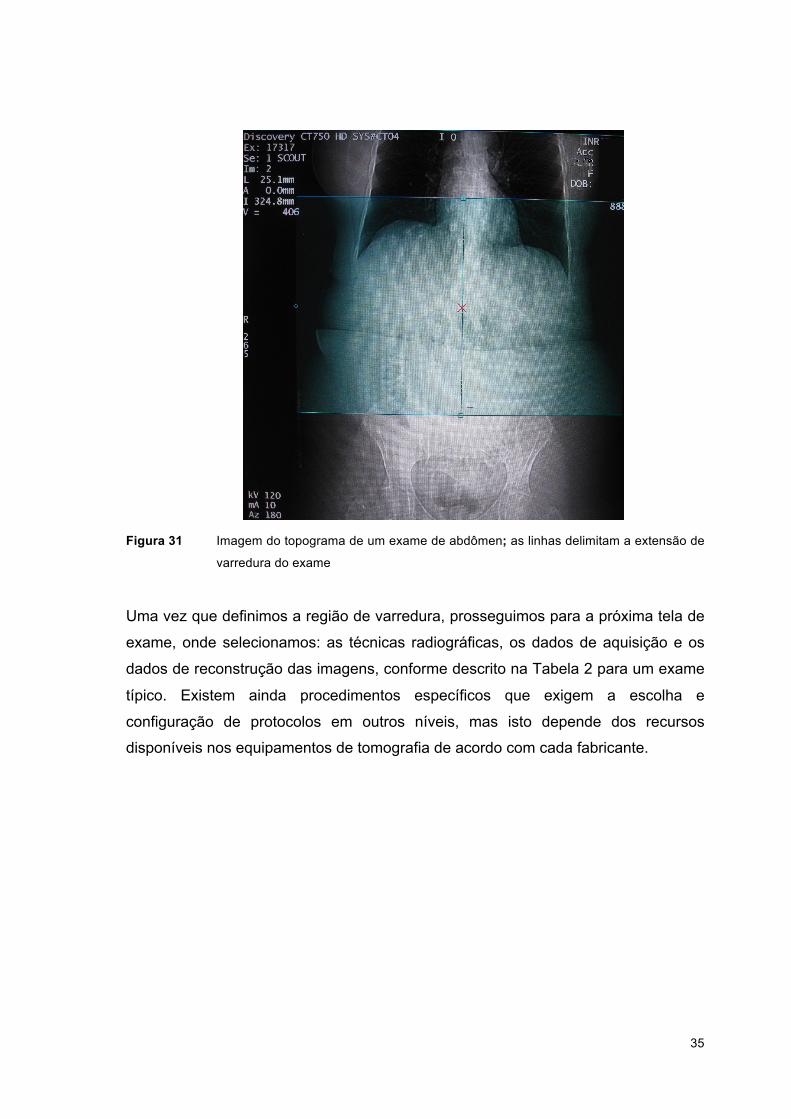
O resultado deste procedimento será uma imagem semelhante à Figura 31, que
mostra um topograma da região entre o tórax e o abdômen. As linhas em azul
mostram a seleção da região anatômica onde se deseja adquirir a imagens
tomográficas.
35
Figura 31 Imagem do topograma de um exame de abdômen; as linhas delimitam a extensão de
varredura do exame
Uma vez que definimos a região de varredura, prosseguimos para a próxima tela de
exame, onde selecionamos: as técnicas radiográficas, os dados de aquisição e os
dados de reconstrução das imagens, conforme descrito na Tabela 2 para um exame
típico. Existem ainda procedimentos específicos que exigem a escolha e
configuração de protocolos em outros níveis, mas isto depende dos recursos
disponíveis nos equipamentos de tomografia de acordo com cada fabricante.
36
Tabela 2 Parâmetros radiográficos: aquisição e reconstrução de imagens em um exame típico
de tomografia
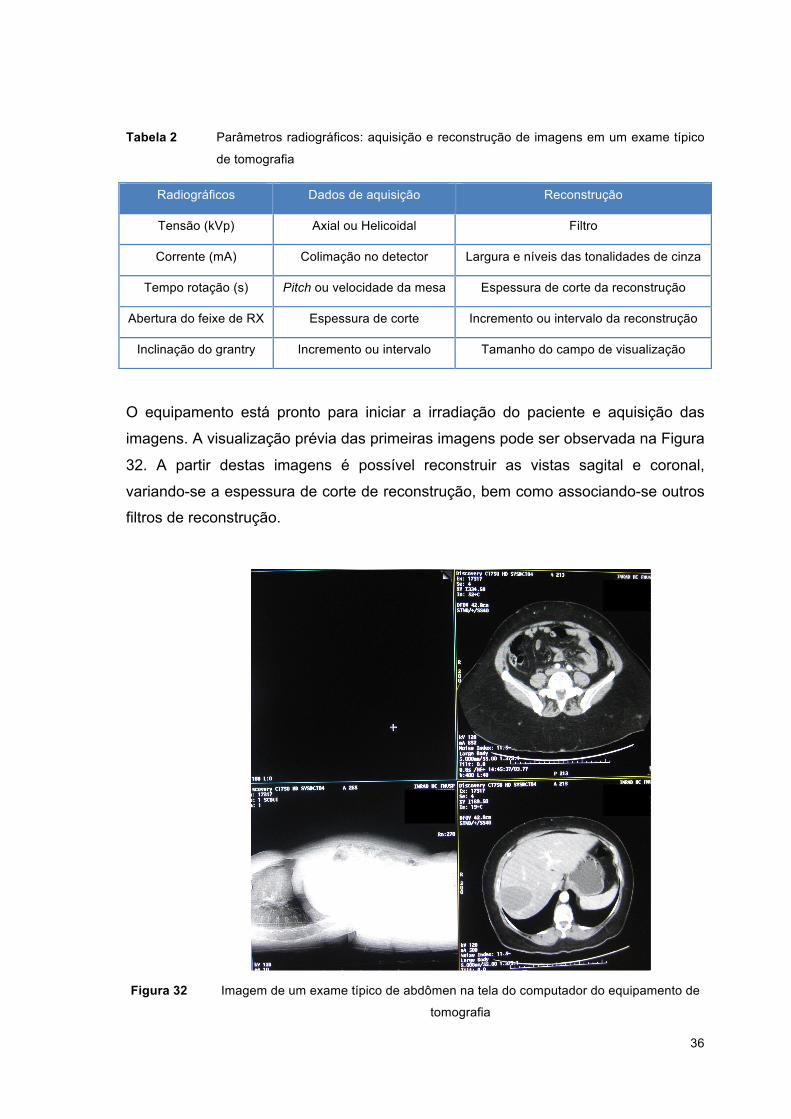
O equipamento está pronto para iniciar a irradiação do paciente e aquisição das
imagens. A visualização prévia das primeiras imagens pode ser observada na Figura
32. A partir destas imagens é possível reconstruir as vistas sagital e coronal,
variando-se a espessura de corte de reconstrução, bem como associando-se outros
filtros de reconstrução.
Figura 32 Imagem de um exame típico de abdômen na tela do computador do equipamento de
tomografia
Radiográficos Dados de aquisição Reconstrução
Tensão (kVp) Axial ou Helicoidal Filtro
Corrente (mA) Colimação no detector Largura e níveis das tonalidades de cinza
Tempo rotação (s) Pitch ou velocidade da mesa Espessura de corte da reconstrução
Abertura do feixe de RX Espessura de corte Incremento ou intervalo da reconstrução
Inclinação do grantry Incremento ou intervalo Tamanho do campo de visualização
37
3 FORMAÇÃO DE IMAGENS
A. RECONSTRUÇÃO DE IMAGEM
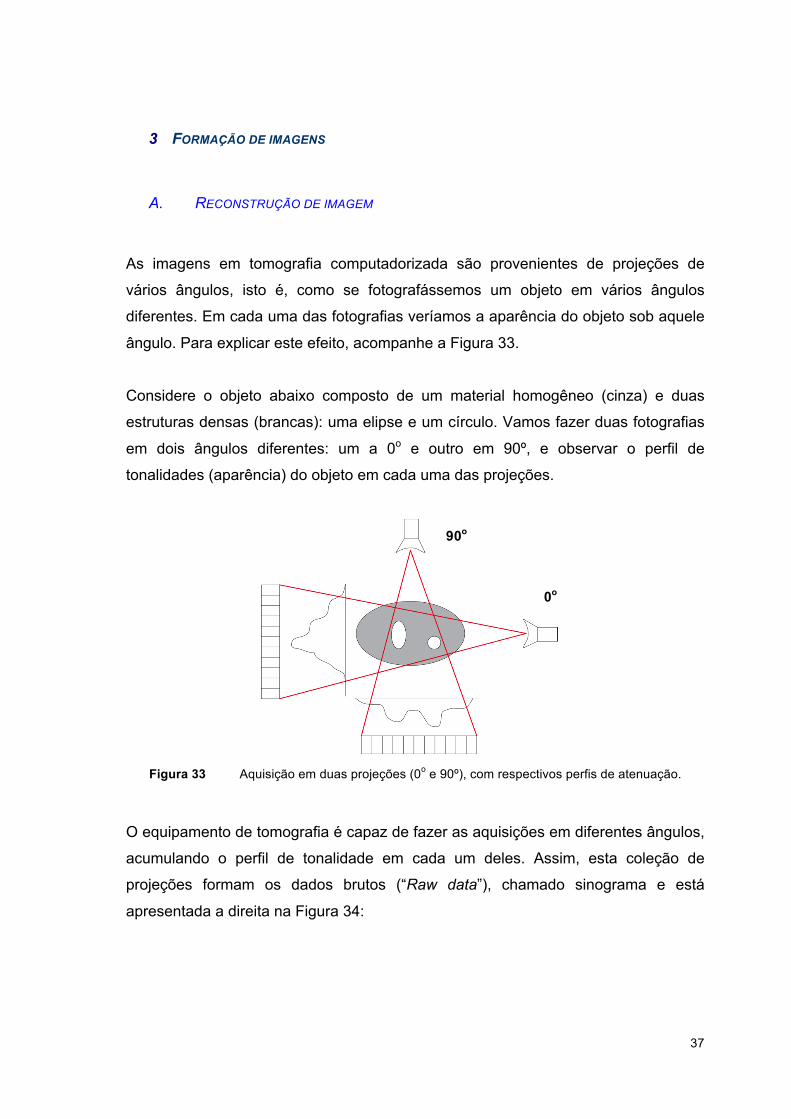
As imagens em tomografia computadorizada são provenientes de projeções de
vários ângulos, isto é, como se fotografássemos um objeto em vários ângulos
diferentes. Em cada uma das fotografias veríamos a aparência do objeto sob aquele
ângulo. Para explicar este efeito, acompanhe a Figura 33.
Considere o objeto abaixo composto de um material homogêneo (cinza) e duas
estruturas densas (brancas): uma elipse e um círculo. Vamos fazer duas fotografias
em dois ângulos diferentes: um a 0o e outro em 90º, e observar o perfil de
tonalidades (aparência) do objeto em cada uma das projeções.
Figura 33 Aquisição em duas projeções (0o e 90º), com respectivos perfis de atenuação.
O equipamento de tomografia é capaz de fazer as aquisições em diferentes ângulos,
acumulando o perfil de tonalidade em cada um deles. Assim, esta coleção de
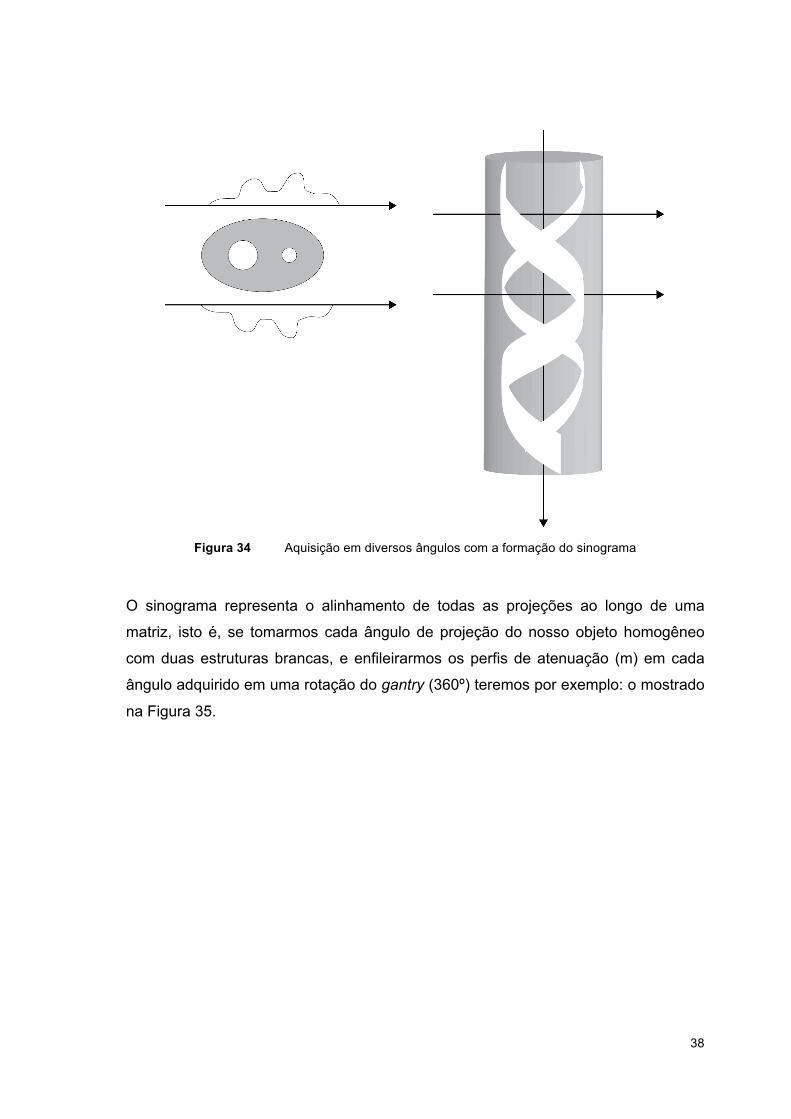
projeções formam os dados brutos (“Raw data”), chamado sinograma e está
apresentada a direita na Figura 34:
0o
90o
38
Figura 34 Aquisição em diversos ângulos com a formação do sinograma
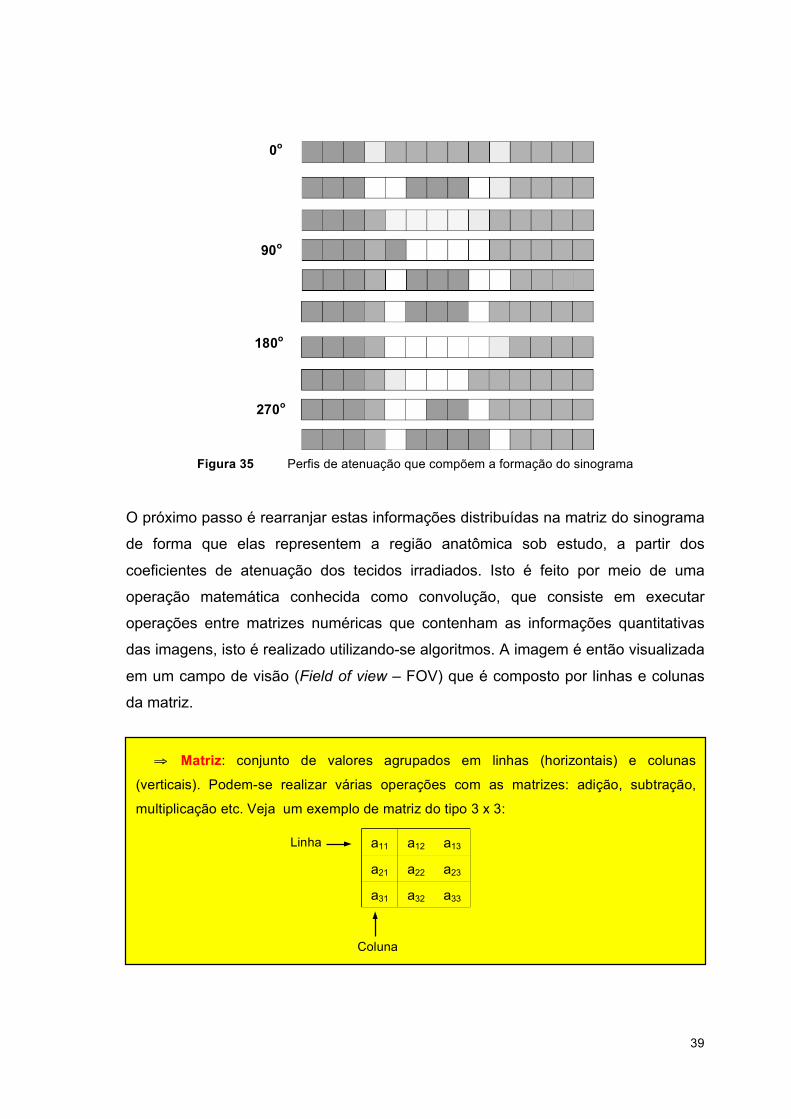
O sinograma representa o alinhamento de todas as projeções ao longo de uma
matriz, isto é, se tomarmos cada ângulo de projeção do nosso objeto homogêneo
com duas estruturas brancas, e enfileirarmos os perfis de atenuação (m) em cada
ângulo adquirido em uma rotação do gantry (360º) teremos por exemplo: o mostrado
na Figura 35.
39
Figura 35 Perfis de atenuação que compõem a formação do sinograma
O próximo passo é rearranjar estas informações distribuídas na matriz do sinograma
de forma que elas representem a região anatômica sob estudo, a partir dos
coeficientes de atenuação dos tecidos irradiados. Isto é feito por meio de uma
operação matemática conhecida como convolução, que consiste em executar
operações entre matrizes numéricas que contenham as informações quantitativas
das imagens, isto é realizado utilizando-se algoritmos. A imagem é então visualizada
em um campo de visão (Field of view – FOV) que é composto por linhas e colunas
da matriz.
0o
270o
180o
90o
⇒ Matriz: conjunto de valores agrupados em linhas (horizontais) e colunas
(verticais). Podem-se realizar várias operações com as matrizes: adição, subtração,
multiplicação etc. Veja um exemplo de matriz do tipo 3 x 3:
a11 a12 a13
a21 a22 a23
a31 a32 a33
Linha
Coluna
40
⇒ Algoritmos: rotinas de programação que descrevem as etapas que precisam ser
realizadas para que um programa específico execute corretamente suas tarefas.
⇒ Matriz em tomografia: é um conjunto de dados numéricos distribuídos entre
linhas e colunas. Normalmente em tomografia as imagens são produzidas em matrizes
de 512 linhas por 512 colunas, representados por 512 x 512. A reconstrução das imagens
consiste em resolver simultaneamente 5122 = 262.144 equações. Nos equipamentos
modernos, estão disponíveis matrizes maiores (1024 x 1024) que melhoram a resolução
espacial, porém requerem mais tempo para reconstrução das imagens. Cada célula (ou
posição) na matriz é chamada de elemento de imagem (do inglês picture element ou
pixel). Um pixel é a representação bi-dimensional de um elemento de voluma (do inglês
volume element ou voxel); o voxel é o produto entre o tamanho do pixel e a espessura de
corte.
41
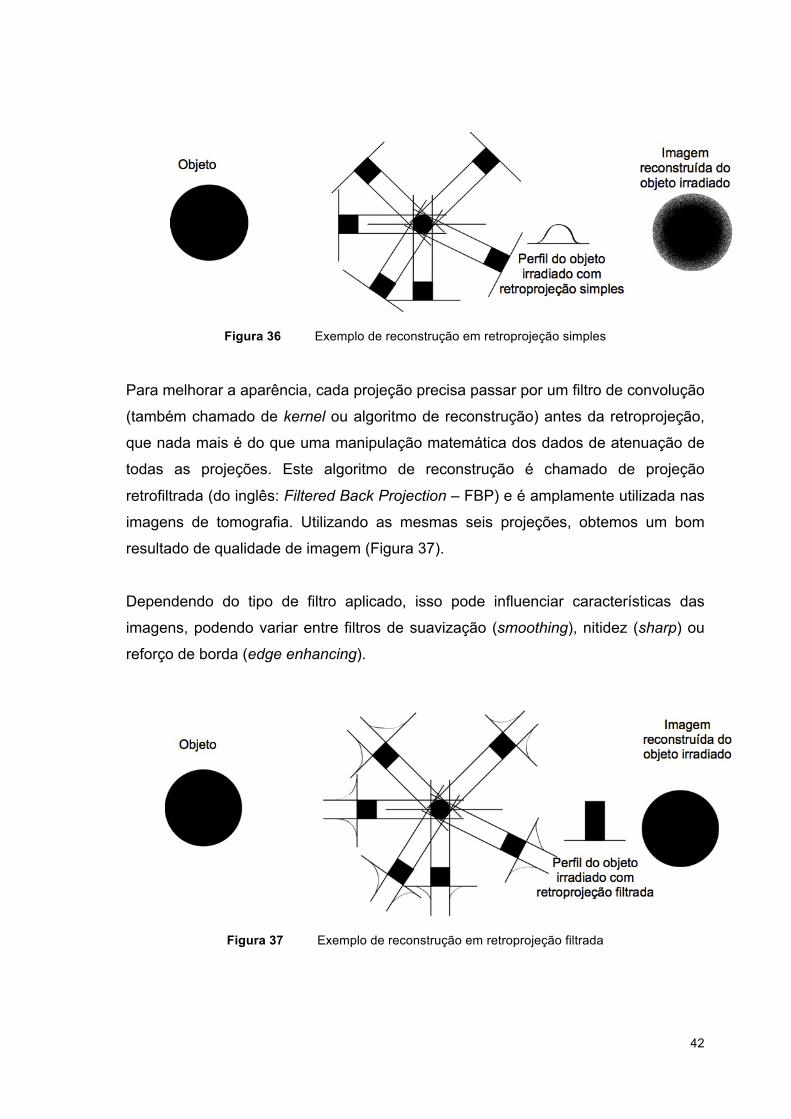
A técnica de reconstrução mais utilizada é a chamada de convolução em
retroprojeção que pode ser do tipo simples ou do tipo filtrada. Em uma retroprojeção
simples, também conhecida como método de soma ou da superposição linear, cada
valor de atenuação é adicionado em todos os pixels na memória do computador ao
longo de cada ângulo adquirido. Como exemplo, vamos considerar apenas seis
projeções conforme a Figura 36, as projeções de um objeto circular deveriam
representar perfeitamente tal objeto em sua forma, porém resultam em uma imagem
sem nitidez e borrada, pois a atenuação dos raios X não é uniforme. Apesar de ser
um resultado insatisfatório, com relação à qualidade da imagem obtida, a imagem
reconstruída reproduz o objeto originalmente irradiado.
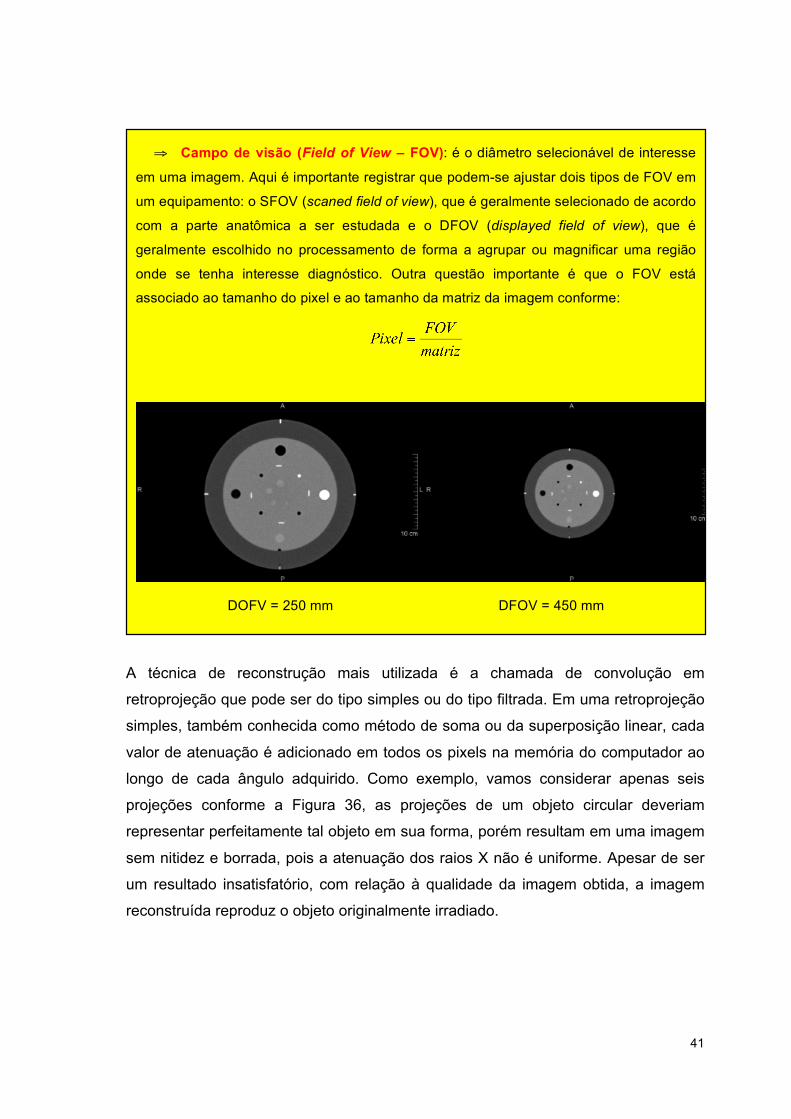
⇒ Campo de visão (Field of View – FOV): é o diâmetro selecionável de interesse
em uma imagem. Aqui é importante registrar que podem-se ajustar dois tipos de FOV em
um equipamento: o SFOV (scaned field of view), que é geralmente selecionado de acordo
com a parte anatômica a ser estudada e o DFOV (displayed field of view), que é
geralmente escolhido no processamento de forma a agrupar ou magnificar uma região
onde se tenha interesse diagnóstico. Outra questão importante é que o FOV está
associado ao tamanho do pixel e ao tamanho da matriz da imagem conforme:
DOFV = 250 mm DFOV = 450 mm
42
Figura 36 Exemplo de reconstrução em retroprojeção simples
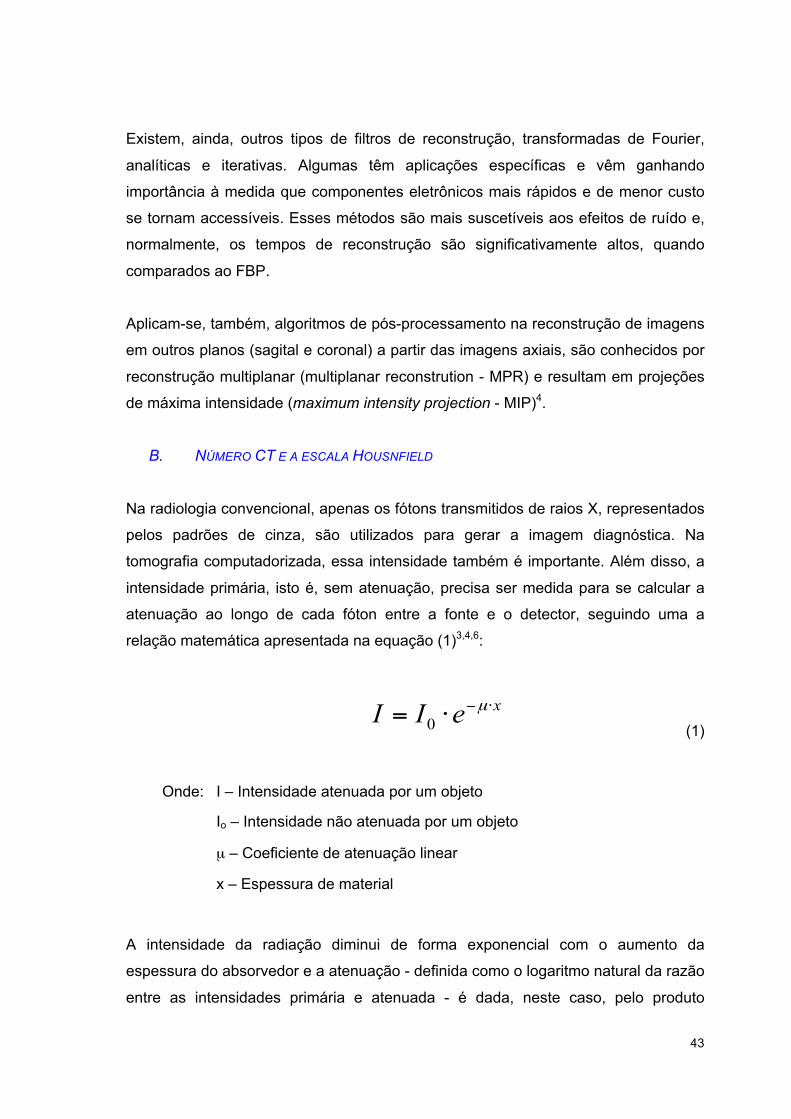
Para melhorar a aparência, cada projeção precisa passar por um filtro de convolução
(também chamado de kernel ou algoritmo de reconstrução) antes da retroprojeção,
que nada mais é do que uma manipulação matemática dos dados de atenuação de
todas as projeções. Este algoritmo de reconstrução é chamado de projeção
retrofiltrada (do inglês: Filtered Back Projection – FBP) e é amplamente utilizada nas
imagens de tomografia. Utilizando as mesmas seis projeções, obtemos um bom
resultado de qualidade de imagem (Figura 37).
Dependendo do tipo de filtro aplicado, isso pode influenciar características das
imagens, podendo variar entre filtros de suavização (smoothing), nitidez (sharp) ou
reforço de borda (edge enhancing).
Figura 37 Exemplo de reconstrução em retroprojeção filtrada
43
Existem, ainda, outros tipos de filtros de reconstrução, transformadas de Fourier,
analíticas e iterativas. Algumas têm aplicações específicas e vêm ganhando
importância à medida que componentes eletrônicos mais rápidos e de menor custo
se tornam accessíveis. Esses métodos são mais suscetíveis aos efeitos de ruído e,
normalmente, os tempos de reconstrução são significativamente altos, quando
comparados ao FBP.
Aplicam-se, também, algoritmos de pós-processamento na reconstrução de imagens
em outros planos (sagital e coronal) a partir das imagens axiais, são conhecidos por
reconstrução multiplanar (multiplanar reconstrution - MPR) e resultam em projeções
de máxima intensidade (maximum intensity projection - MIP)4.
B. NÚMERO CT E A ESCALA HOUSNFIELD
Na radiologia convencional, apenas os fótons transmitidos de raios X, representados
pelos padrões de cinza, são utilizados para gerar a imagem diagnóstica. Na
tomografia computadorizada, essa intensidade também é importante. Além disso, a
intensidade primária, isto é, sem atenuação, precisa ser medida para se calcular a
atenuação ao longo de cada fóton entre a fonte e o detector, seguindo uma a
relação matemática apresentada na equação (1)3,4,6:
(1)
Onde: I – Intensidade atenuada por um objeto
Io – Intensidade não atenuada por um objeto
µ – Coeficiente de atenuação linear
x – Espessura de material
A intensidade da radiação diminui de forma exponencial com o aumento da
espessura do absorvedor e a atenuação - definida como o logaritmo natural da razão
entre as intensidades primária e atenuada - é dada, neste caso, pelo produto
xeII ⋅−⋅= µ0
44
simples entre o coeficiente de atenuação linear (µ) e a espessura do absorvedor (x).
Se a espessura x for conhecida, obtém-se facilmente o valor de µ.
Considerando que os tecidos e estruturas anatômicas, irradiados, não representam
objetos homogêneos, isto é, existem vários coeficientes de atuação diferentes
devido ao diferentes tipos de tecido e, sabendo que espectro de radiação X é
policromático ou polienergético; assim, a intensidade de radiação [Io(E)] é fortemente
dependente da energia, tornando o coeficiente de atenuação linear µ(E) também
dependente dela, consequentemente. A contribuição para a atenuação total
resultante depende da somatória de cada valor local de atenuação do coeficiente de
atenuação linear (µ) realizada com pequenos incrementos de espessuras x - para
então ser apresentada a soma de todos os µ’s - ao longo do caminho desses fótons,
em cada projeção12).
A tomografia consiste da medição exata dessas projeções lineares. Radon, ainda
em 1917, mostrou que uma distribuição bidimensional de um objeto podia ser
determinada exatamente se for dado um número infinito de integrais. Os primeiros
equipamentos de tomografia utilizavam a Técnica de Reconstrução Algébrica
(Algebric Reconstruction Techniques - ART) proposta dor Radon, pois manipulavam
um número finito de projeções em matrizes pequenas (80 x 80). Com a necessidade
de se manipularem matrizes maiores, com volume de dados muito maior para se
refinar as imagens, a técnica ART se tornou inviável devido a seu custo em tempo
computacional e deram lugar aos algoritmos de reconstrução FBP6.
De qualquer maneira, para a visualização direta dos µ, seria necessário realizar uma
comparação entre vários equipamentos em faixas de energia e filtração diferentes, o
que é inviável. Então, foi estabelecida uma equação relativa ao coeficiente de
atenuação entre um material de referência e os outros órgãos e tecidos. Esses
valores são conhecidos como “Números CT”. Utiliza-se a água como referência por
que seu número CT é similar ao dos tecidos moles e também por ser de fácil
obtenção para calibrar os equipamentos.
45
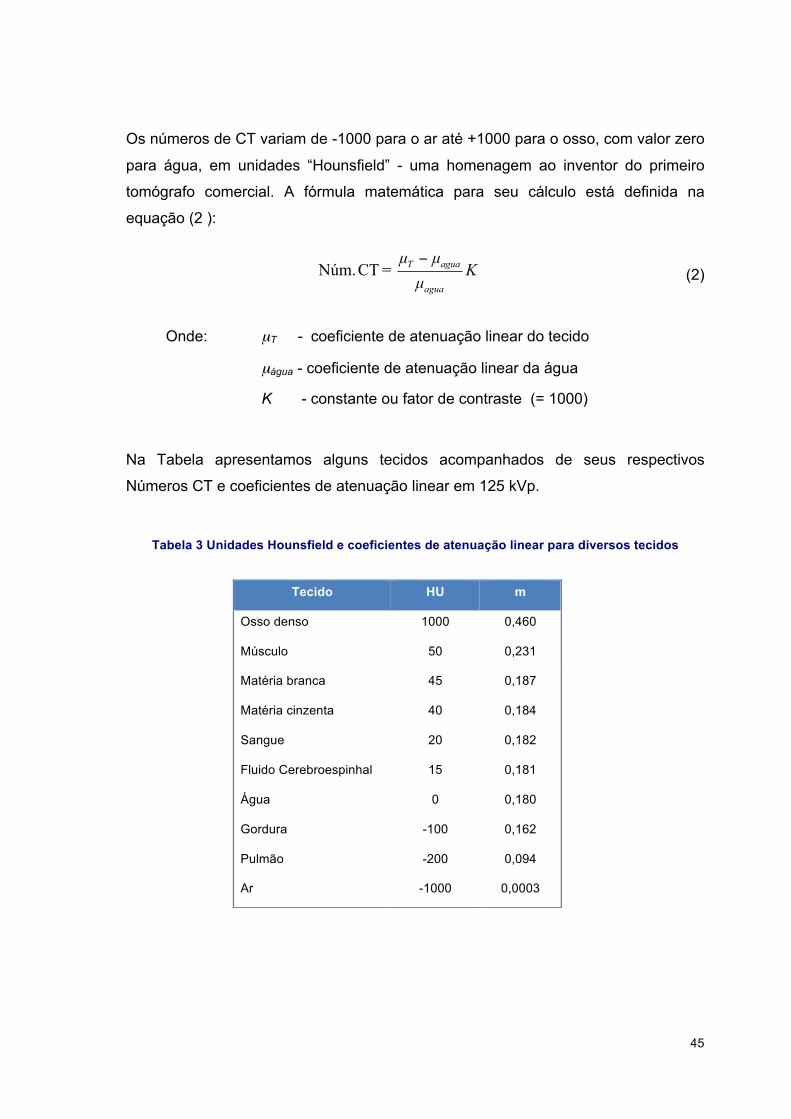
Os números de CT variam de -1000 para o ar até +1000 para o osso, com valor zero
para água, em unidades “Hounsfield” - uma homenagem ao inventor do primeiro
tomógrafo comercial. A fórmula matemática para seu cálculo está definida na
equação (2 ):
(2)
Onde: µT - coeficiente de atenuação linear do tecido
µágua - coeficiente de atenuação linear da água
K - constante ou fator de contraste (= 1000)
Na Tabela apresentamos alguns tecidos acompanhados de seus respectivos
Números CT e coeficientes de atenuação linear em 125 kVp.
Tabela 3 Unidades Hounsfield e coeficientes de atenuação linear para diversos tecidos
Tecido HU m
Osso denso 1000 0,460
Músculo 50 0,231
Matéria branca 45 0,187
Matéria cinzenta 40 0,184
Sangue 20 0,182
Fluido Cerebroespinhal 15 0,181
Água 0 0,180
Gordura -100 0,162
Pulmão -200 0,094
Ar -1000 0,0003
Kµµµ
=agua
aguaT −CT Núm.
46
Normalmente, a escala Hounsfield é apresenta entre os valores de número CT para
o ar (-1000) e para o osso (+1000)6, mas não existe um limite superior para a escala
Hounsfield. Encontra-se disponível nos equipamentos clínicos uma faixa entre -
1024 HU até +3071 HU, que totaliza 4096 (212) tonalidades de cinza, referente a 12
Bits de profundidade.
C. VISUALIZAÇÃO E MANIPULAÇÃO DE IMAGENS
Apesar de toda a faixa de tonalidades de cinza disponível (4096), o olho humano
não é capaz de diferenciar todas estas tonalidade, na verdade ele é capaz de
distinguir entre 60 e 80 tons. Existem limitações, também, nos monitores clínicos que
são limitados em 210 de profundidade de bit, que limita a visualização de 1024
tonalidades.
Entretanto, toda esta faixa fica disponível no equipamento e pode ser selecionada
em intervalos que facilitem a visualização de estruturas específicas, mais ou menos
densas, por exemplo. Esse processo é chamado de janelamento e pode ser
realizado diretamente no comando do equipamento de tomografia1,6,8.
A largura da janela (window width - WW) é faixa de números CT que pode ser
selecionada de forma a favorecer a visualização de diferentes tecidos, isto é quando
se deseja visualizar grandes diferenças como as apresentadas nas imagens de
pulmão ou do esqueleto, uma janela larga deve ser escolhida; e quando se deseja
visualizar pequenas diferenças de atenuação, como no cérebro, deve ser escolhida
uma janela estreita. O valor central (window level - WL) da faixa escolhida
corresponderá ao valor médio de número CT das estruturas sob estudo6.
47
4 PROGRAMA DE GARANTIA DE QUALIDADE EM TOMOGRAFIA COMPUTADORIZADA
Quais parâmetros são avaliados em um Programa de Garantia de Qualidade (PGQ)
aplicado à tomografia computadorizada?
Para facilitar a apresentação dos conceitos e como os testes de controle de
qualidade (CQ) são realizados, separaremos a explicação em duas áreas:
- Avaliação do índice dose no paciente
- Avaliação da qualidade de imagem (QI)
A. ÍNDICE DOSE NO PACIENTE
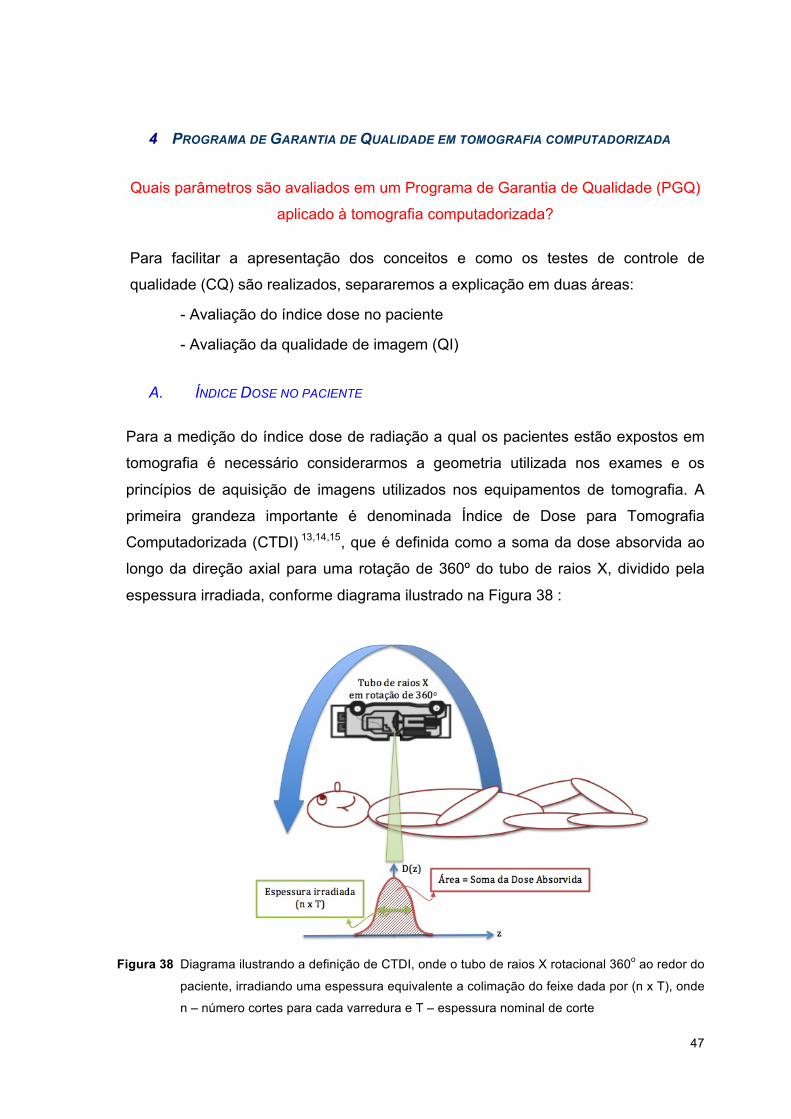
Para a medição do índice dose de radiação a qual os pacientes estão expostos em
tomografia é necessário considerarmos a geometria utilizada nos exames e os
princípios de aquisição de imagens utilizados nos equipamentos de tomografia. A
primeira grandeza importante é denominada Índice de Dose para Tomografia
Computadorizada (CTDI) 13,14,15, que é definida como a soma da dose absorvida ao
longo da direção axial para uma rotação de 360º do tubo de raios X, dividido pela
espessura irradiada, conforme diagrama ilustrado na Figura 38 :
Figura 38 Diagrama ilustrando a definição de CTDI, onde o tubo de raios X rotacional 360o ao redor do
paciente, irradiando uma espessura equivalente a colimação do feixe dada por (n x T), onde
n – número cortes para cada varredura e T – espessura nominal de corte
48
A Portaria SVS MS 45316 e o Guia RE 101617 regulamentam a medição do CTDI e
na prática empregada nos Programas de Garantia de Qualidade (PGQ), esta
grandeza pode ser avaliada com uma câmara de ionização do tipo “lápis” (Figura 40)
obtendo-se o CTDIw (ponderado). O CTDIw é o resultado da combinação do CTDI
medido na região central (CTDIc) e na perifieria (CTDIp) de um objeto simulador de
paciente cilíndrico de polimetilmetacrilato (PMMA), conforme Equação (3):
(3)
Onde: CTDIc – CTDI medido na região central
CTDIp – média de quatro CTDI medidos na região periférica
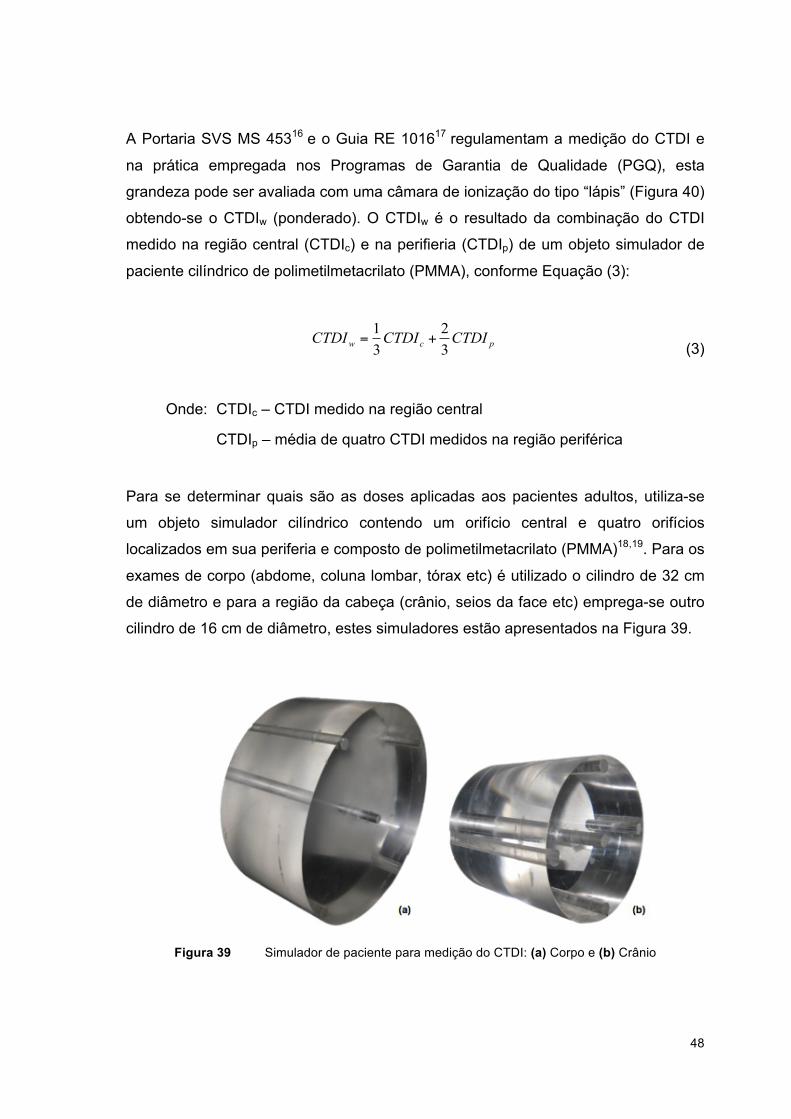
Para se determinar quais são as doses aplicadas aos pacientes adultos, utiliza-se
um objeto simulador cilíndrico contendo um orifício central e quatro orifícios
localizados em sua periferia e composto de polimetilmetacrilato (PMMA)18,19. Para os
exames de corpo (abdome, coluna lombar, tórax etc) é utilizado o cilindro de 32 cm
de diâmetro e para a região da cabeça (crânio, seios da face etc) emprega-se outro
cilindro de 16 cm de diâmetro, estes simuladores estão apresentados na Figura 39.
Figura 39 Simulador de paciente para medição do CTDI: (a) Corpo e (b) Crânio
pcw CTDICTDICTDI32
31
+=
49
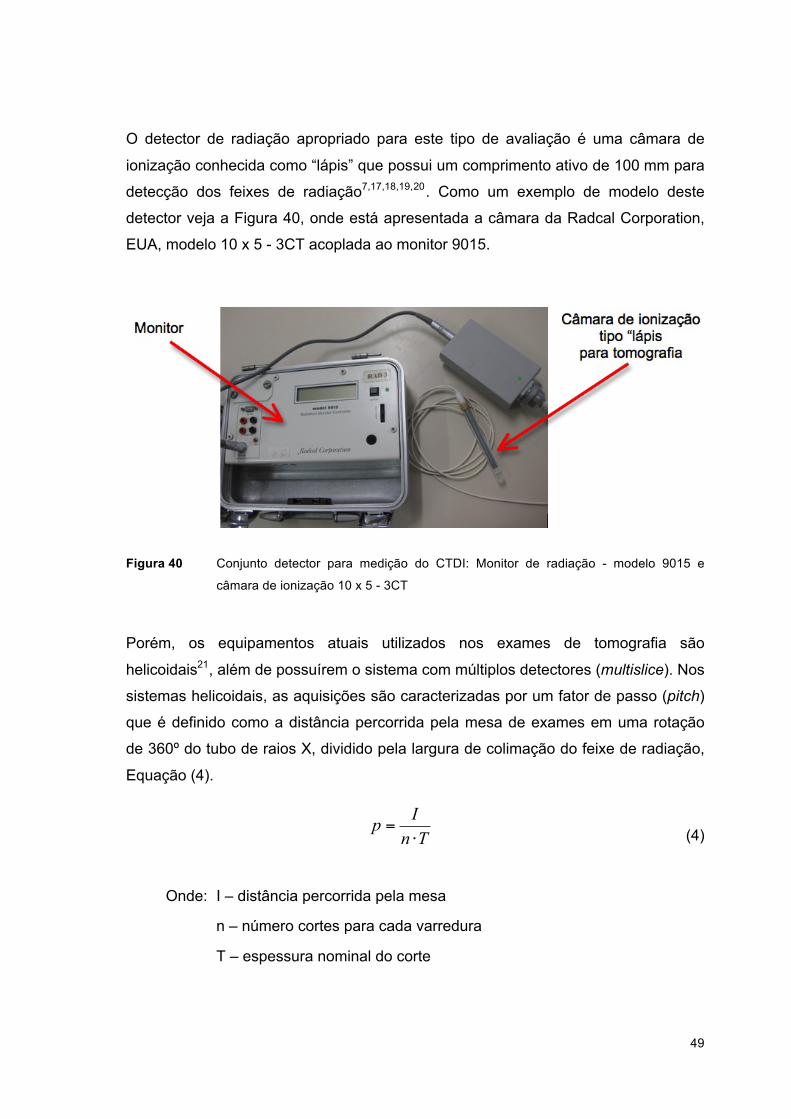
O detector de radiação apropriado para este tipo de avaliação é uma câmara de
ionização conhecida como “lápis” que possui um comprimento ativo de 100 mm para
detecção dos feixes de radiação7,17,18,19,20. Como um exemplo de modelo deste
detector veja a Figura 40, onde está apresentada a câmara da Radcal Corporation,
EUA, modelo 10 x 5 - 3CT acoplada ao monitor 9015.
Figura 40 Conjunto detector para medição do CTDI: Monitor de radiação - modelo 9015 e
câmara de ionização 10 x 5 - 3CT
Porém, os equipamentos atuais utilizados nos exames de tomografia são
helicoidais21, além de possuírem o sistema com múltiplos detectores (multislice). Nos
sistemas helicoidais, as aquisições são caracterizadas por um fator de passo (pitch)
que é definido como a distância percorrida pela mesa de exames em uma rotação
de 360º do tubo de raios X, dividido pela largura de colimação do feixe de radiação,
Equação (4).
(4)
Onde: I – distância percorrida pela mesa
n – número cortes para cada varredura
T – espessura nominal do corte
TnIp⋅
=
50
Também relacionado ao pitch, podemos definir o mAs efetivo que é dado pela
relação (5):
!"#!"!#$%& =!"#!
(5)
Onde: mAs – configurado no protocolo de exame
p – pitch, definido na Equação (4)
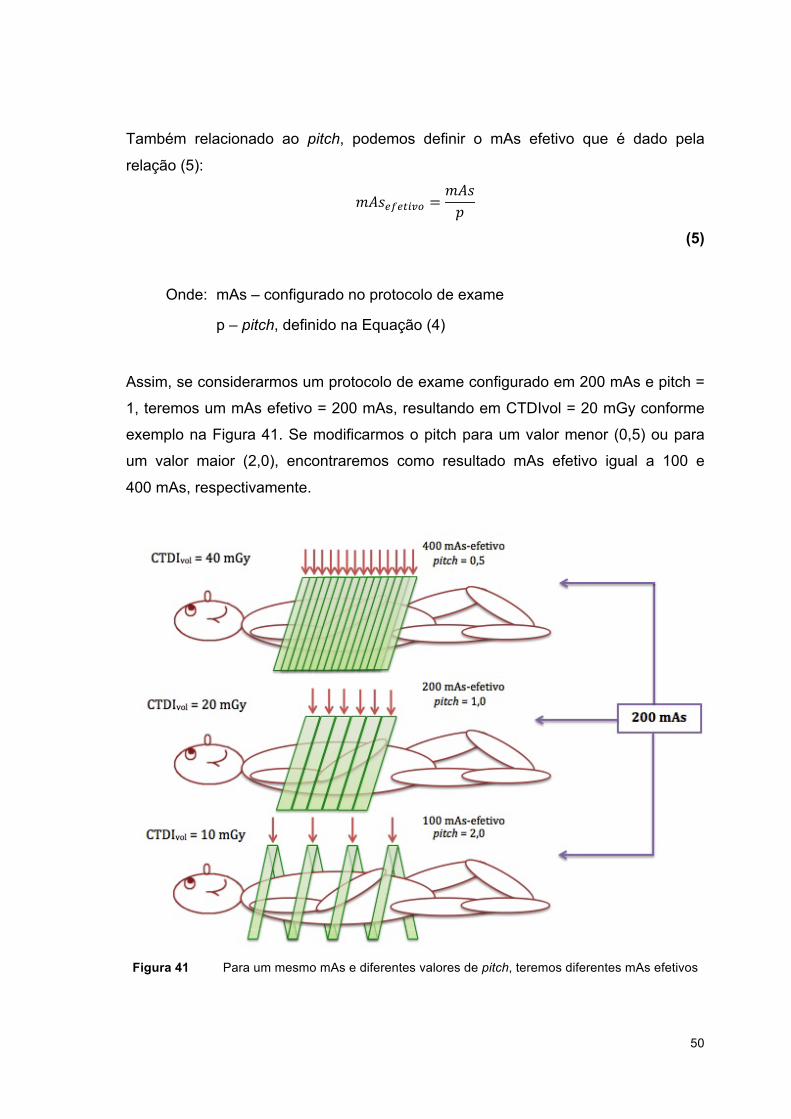
Assim, se considerarmos um protocolo de exame configurado em 200 mAs e pitch =
1, teremos um mAs efetivo = 200 mAs, resultando em CTDIvol = 20 mGy conforme
exemplo na Figura 41. Se modificarmos o pitch para um valor menor (0,5) ou para
um valor maior (2,0), encontraremos como resultado mAs efetivo igual a 100 e
400 mAs, respectivamente.
Figura 41 Para um mesmo mAs e diferentes valores de pitch, teremos diferentes mAs efetivos
51
É interessante notar, também na Figura 41, que quanto maior for valor do pitch,
menor será a dose no local do exame, pois o feixe de raios X passará por menos
tecidos do paciente, depositando menor quantidade de energia por unidade de
massa irradiada22.
Então, a avaliação de dose durante aquisições helicoidais deve considerar este
deslocamento do paciente no eixo longitudinal do equipamento de tomografia.
Assim, define-se outra grandeza: o CTDI volumétrico (CTDIvol), que é CTDIw dividido
pelo pitch, Equação (6). Esta grandeza representa a dose média em uma “fatia”
adquirida no modo helicoidal e está fortemente relacionada com o nível de ruído das
reconstruções das imagens.
(6)
Onde: CTDIw – CTDI ponderado, definido na Equação (3)
p – pitch, definido na Equação (4)
Todos os CTDI são expressos em mGy e caracterizam uma irradiação localizada no
paciente, é muito importante entender que o CTDI não representa a dose real no
paciente. Tal grandeza é um indicador de doses que pode ser utilizado para se
comparar:
Diferentes equipamentos de tomografia;
Diferentes protocolos de imagem; ou ainda,
Para comparar o desempenho de um sistema em comparação a algum
nível de referência.
Os estudos de dosimetria em paciente são mais complicados e ainda não temos
nada definido em normas que regulamentem o cálculo de dose real em pacientes
submetidos a exames de tomografia.
O Produto Dose Comprimento (Dose Length Product - DLP)5,7,8,20 foi introduzido nos
estudos da radiação em tomografia e é definido conforme a Equação (7), onde o
pCTDI
CTDI wvol =

52
CTDIvol é multiplicado pelo comprimento irradiado durante o exame e é apresentado
em unidades mGy•cm.
(7)
Onde: CTDIvol – CTDI volumétrico, definido na Equação (6)
L – comprimento irradiado durante exame
B. QUALIDADE DA IMAGEM EM TOMOGRAFIA
Para que se possa avaliar a qualidade das imagens (QI) em tomografia são
necessários dispositivos de imagem adequados a esta modalidade diagnóstica23. De
aplicação semelhante à radiologia convencional, fluoroscopia e mamografia; a
tomografia precisa de objetos simuladores que representem estruturas de alto e
baixo contraste, componentes geométricos e regiões homogêneas que permitam
determinar, tanto de forma qualitativa quanto de forma quantitativa, os fatores de QI.
Na tomografia estes dispositivos costumam ser cilíndricos, possuindo vários
módulos internos onde ficam distribuídas as estruturas que permitirão as avaliações
dos parâmetros de imagem. Na Figura 42 estão apresentados alguns destes
simuladores:
Figura 42 Simulador de paciente para avaliação da qualidade de imagem: Catphan Phantom – The
Phantom Lab (a), CT Performance Phantom - CIRS (b) e ACR CT Phantom Gammex (c)
(a) (b) (c)
LCTDIDLP vol ×=
53
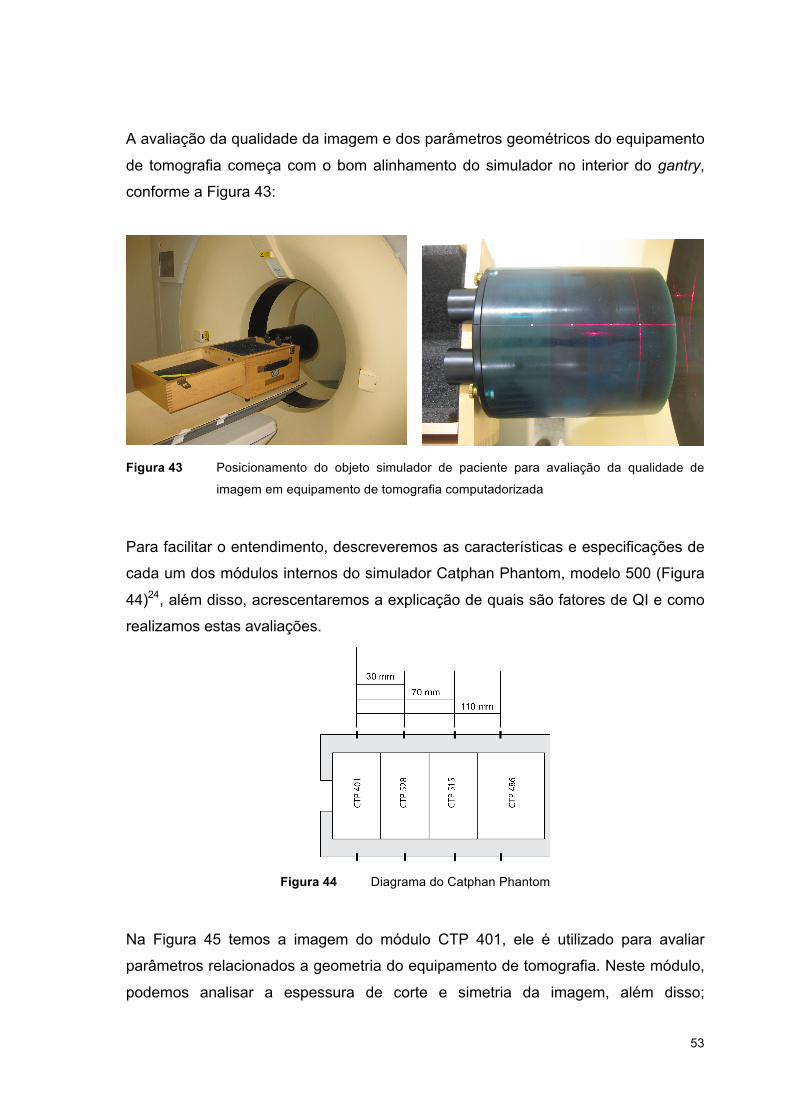
A avaliação da qualidade da imagem e dos parâmetros geométricos do equipamento
de tomografia começa com o bom alinhamento do simulador no interior do gantry,
conforme a Figura 43:
Figura 43 Posicionamento do objeto simulador de paciente para avaliação da qualidade de
imagem em equipamento de tomografia computadorizada
Para facilitar o entendimento, descreveremos as características e especificações de
cada um dos módulos internos do simulador Catphan Phantom, modelo 500 (Figura
44)24, além disso, acrescentaremos a explicação de quais são fatores de QI e como
realizamos estas avaliações.
Figura 44 Diagrama do Catphan Phantom
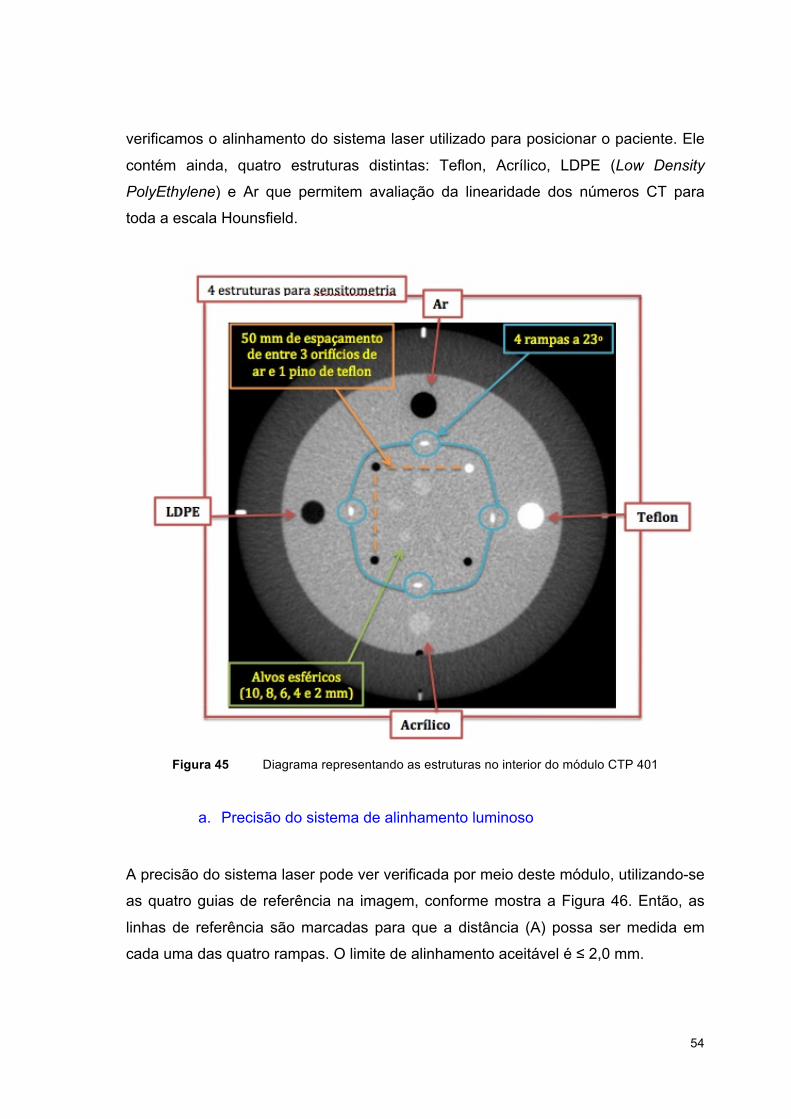
Na Figura 45 temos a imagem do módulo CTP 401, ele é utilizado para avaliar
parâmetros relacionados a geometria do equipamento de tomografia. Neste módulo,
podemos analisar a espessura de corte e simetria da imagem, além disso;
54
verificamos o alinhamento do sistema laser utilizado para posicionar o paciente. Ele
contém ainda, quatro estruturas distintas: Teflon, Acrílico, LDPE (Low Density
PolyEthylene) e Ar que permitem avaliação da linearidade dos números CT para
toda a escala Hounsfield.
Figura 45 Diagrama representando as estruturas no interior do módulo CTP 401
a. Precisão do sistema de alinhamento luminoso
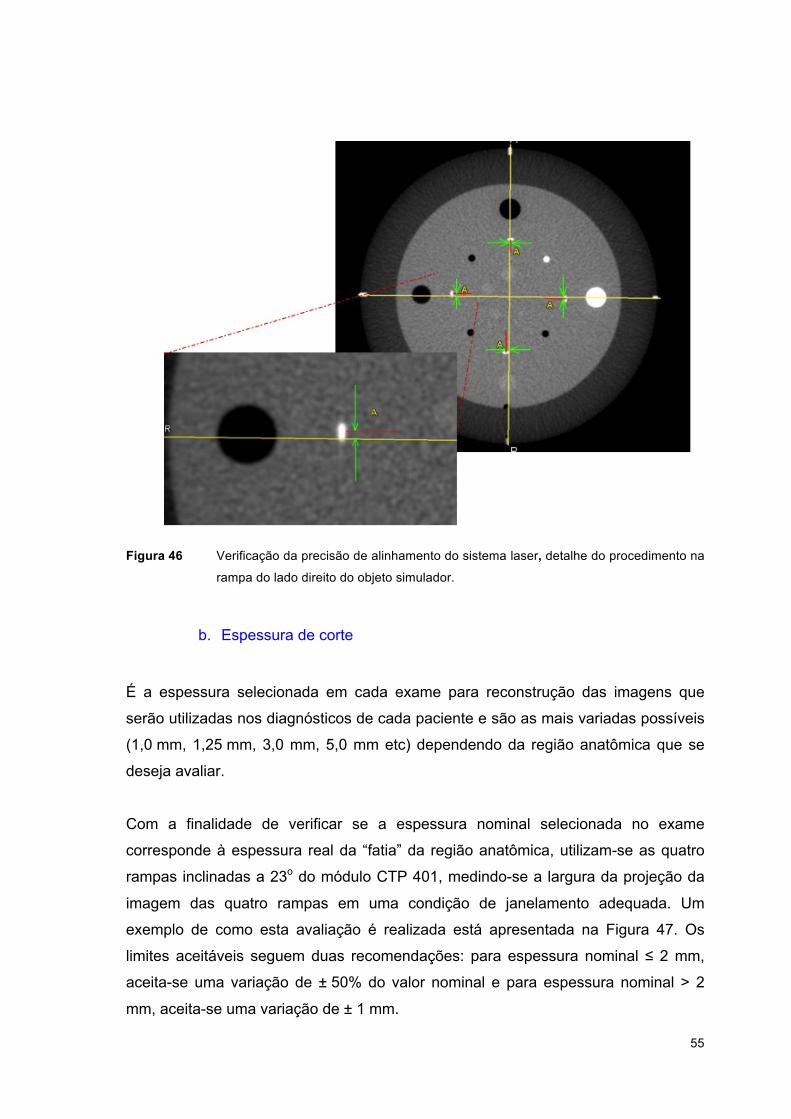
A precisão do sistema laser pode ver verificada por meio deste módulo, utilizando-se
as quatro guias de referência na imagem, conforme mostra a Figura 46. Então, as
linhas de referência são marcadas para que a distância (A) possa ser medida em
cada uma das quatro rampas. O limite de alinhamento aceitável é ≤ 2,0 mm.
55
Figura 46 Verificação da precisão de alinhamento do sistema laser, detalhe do procedimento na
rampa do lado direito do objeto simulador.
b. Espessura de corte
É a espessura selecionada em cada exame para reconstrução das imagens que
serão utilizadas nos diagnósticos de cada paciente e são as mais variadas possíveis
(1,0 mm, 1,25 mm, 3,0 mm, 5,0 mm etc) dependendo da região anatômica que se
deseja avaliar.
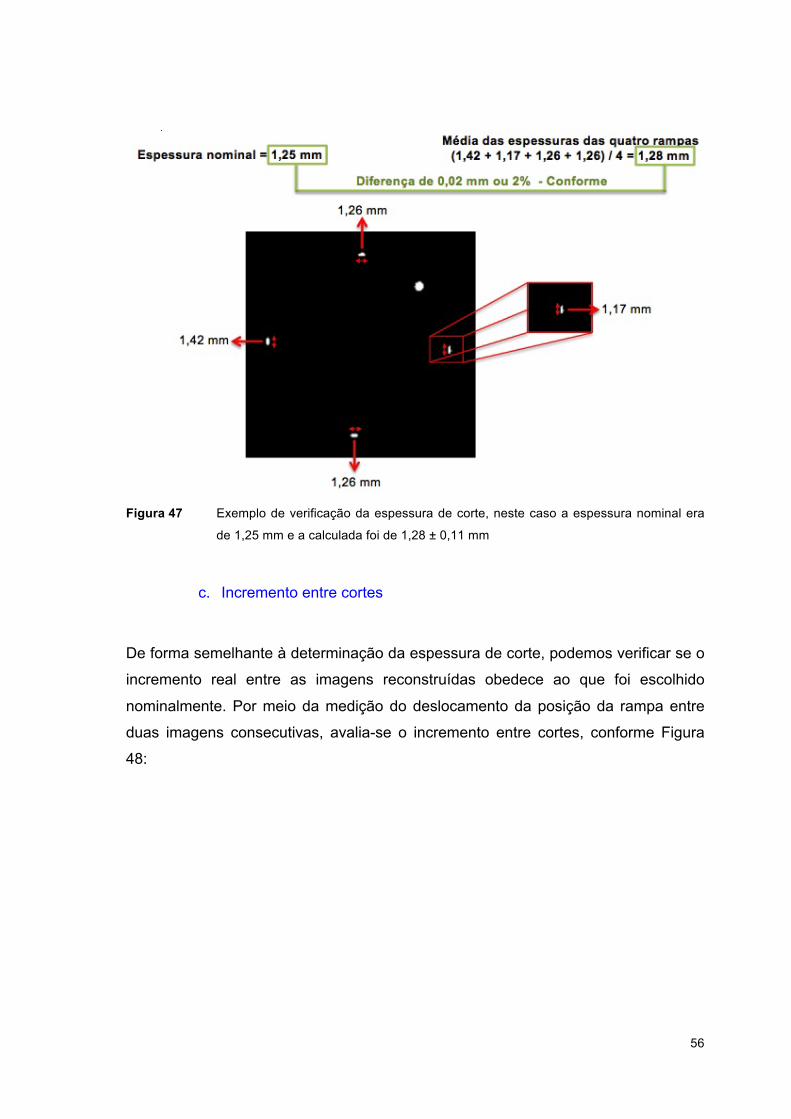
Com a finalidade de verificar se a espessura nominal selecionada no exame
corresponde à espessura real da “fatia” da região anatômica, utilizam-se as quatro
rampas inclinadas a 23o do módulo CTP 401, medindo-se a largura da projeção da
imagem das quatro rampas em uma condição de janelamento adequada. Um
exemplo de como esta avaliação é realizada está apresentada na Figura 47. Os
limites aceitáveis seguem duas recomendações: para espessura nominal ≤ 2 mm,
aceita-se uma variação de ± 50% do valor nominal e para espessura nominal > 2
mm, aceita-se uma variação de ± 1 mm.
56
Figura 47 Exemplo de verificação da espessura de corte, neste caso a espessura nominal era
de 1,25 mm e a calculada foi de 1,28 ± 0,11 mm
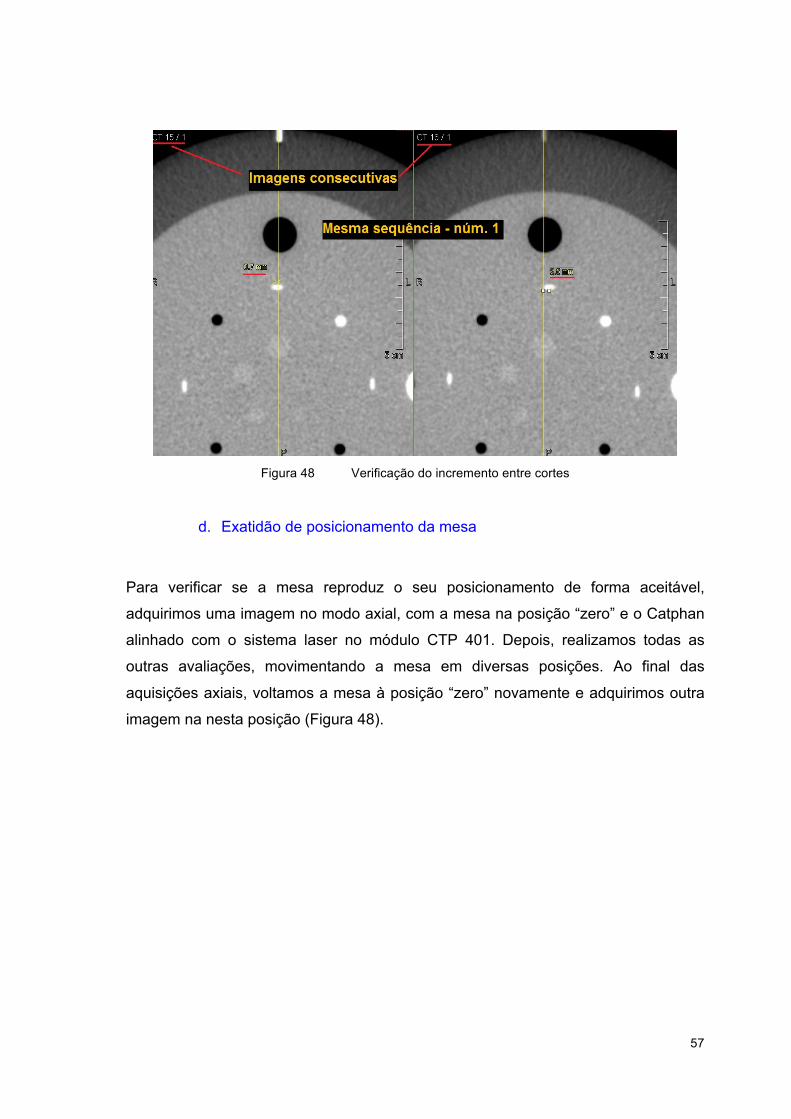
c. Incremento entre cortes
De forma semelhante à determinação da espessura de corte, podemos verificar se o
incremento real entre as imagens reconstruídas obedece ao que foi escolhido
nominalmente. Por meio da medição do deslocamento da posição da rampa entre
duas imagens consecutivas, avalia-se o incremento entre cortes, conforme Figura
48:
57
Figura 48 Verificação do incremento entre cortes
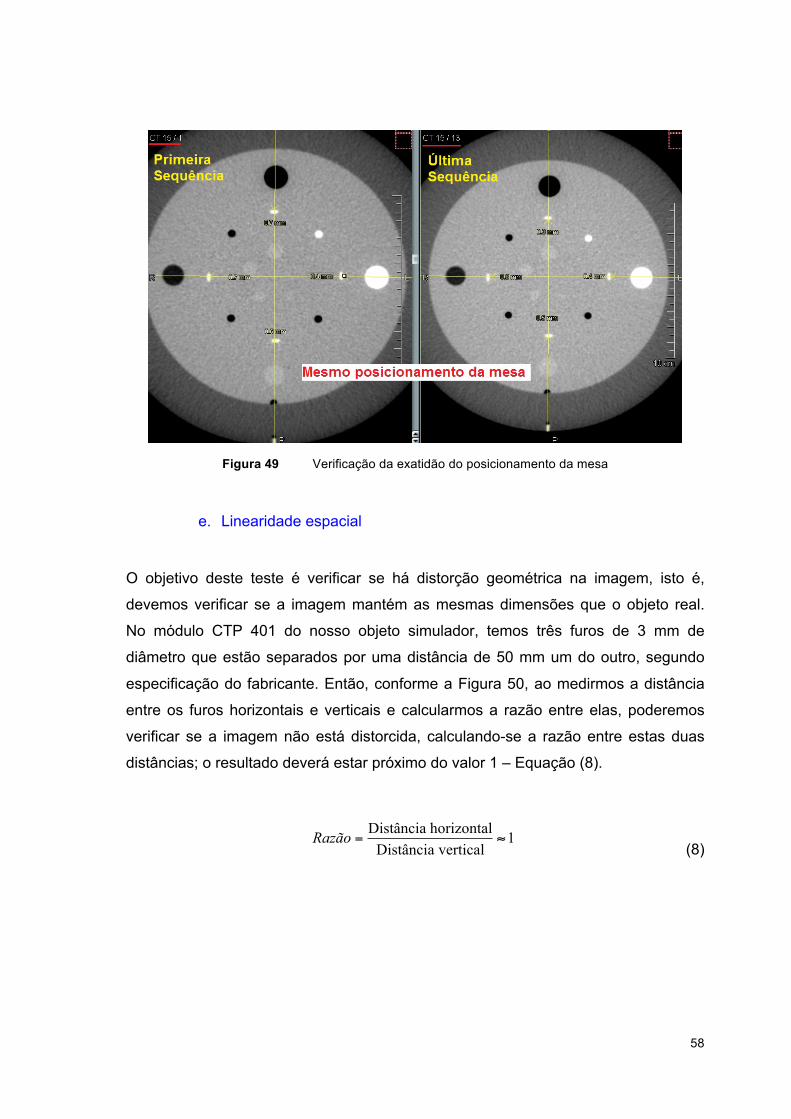
d. Exatidão de posicionamento da mesa
Para verificar se a mesa reproduz o seu posicionamento de forma aceitável,
adquirimos uma imagem no modo axial, com a mesa na posição “zero” e o Catphan
alinhado com o sistema laser no módulo CTP 401. Depois, realizamos todas as
outras avaliações, movimentando a mesa em diversas posições. Ao final das
aquisições axiais, voltamos a mesa à posição “zero” novamente e adquirimos outra
imagem na nesta posição (Figura 48).
58
Figura 49 Verificação da exatidão do posicionamento da mesa
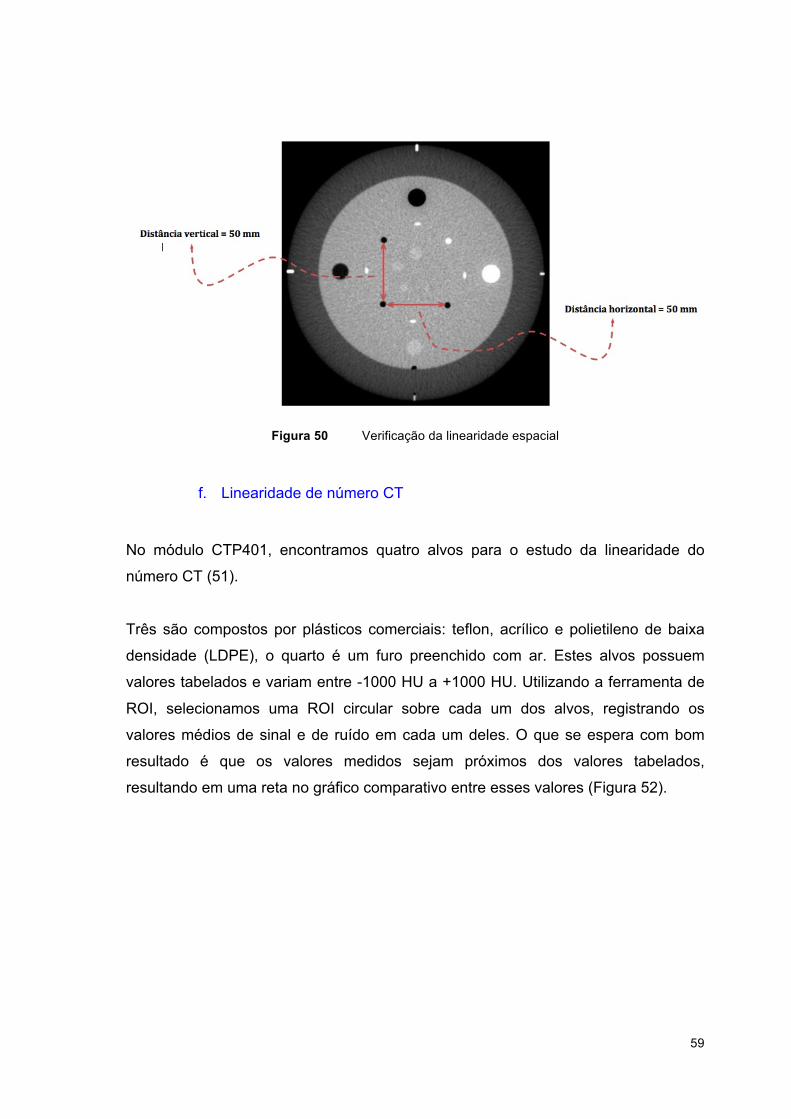
e. Linearidade espacial
O objetivo deste teste é verificar se há distorção geométrica na imagem, isto é,
devemos verificar se a imagem mantém as mesmas dimensões que o objeto real.
No módulo CTP 401 do nosso objeto simulador, temos três furos de 3 mm de
diâmetro que estão separados por uma distância de 50 mm um do outro, segundo
especificação do fabricante. Então, conforme a Figura 50, ao medirmos a distância
entre os furos horizontais e verticais e calcularmos a razão entre elas, poderemos
verificar se a imagem não está distorcida, calculando-se a razão entre estas duas
distâncias; o resultado deverá estar próximo do valor 1 – Equação (8).
(8)
1 verticalDistância
horizontal Distância≈=Razão
59
Figura 50 Verificação da linearidade espacial
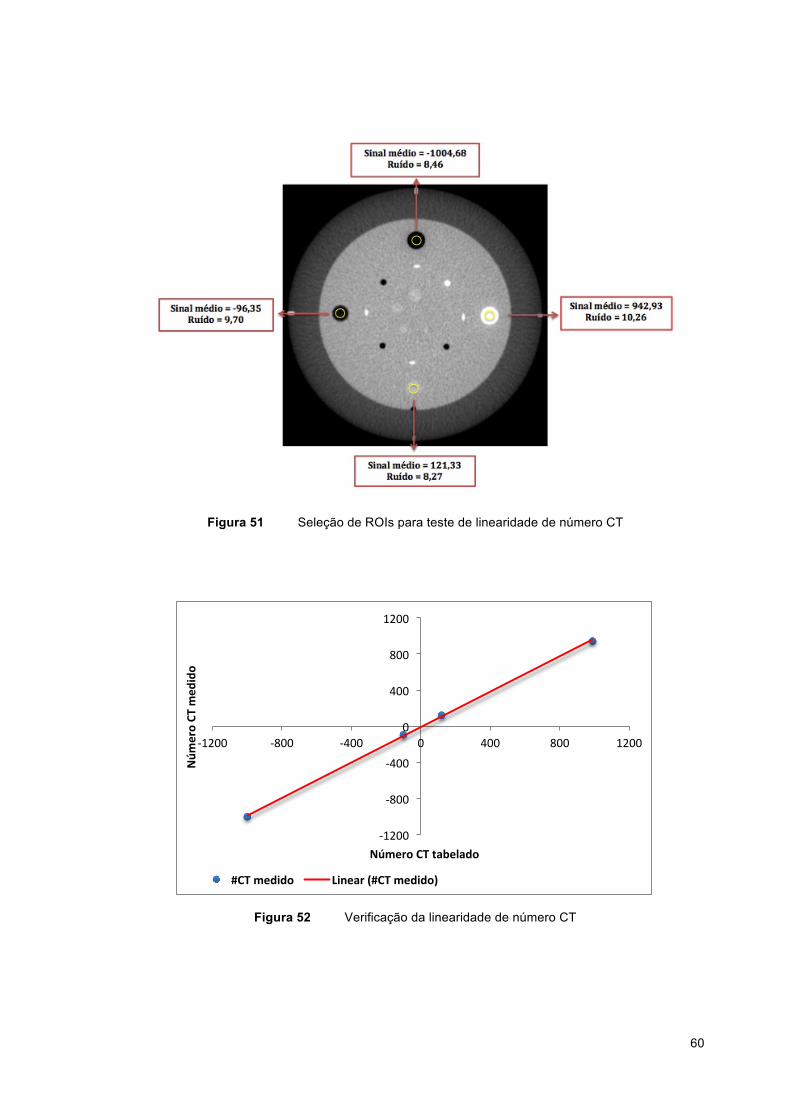
f. Linearidade de número CT
No módulo CTP401, encontramos quatro alvos para o estudo da linearidade do
número CT (51).
Três são compostos por plásticos comerciais: teflon, acrílico e polietileno de baixa
densidade (LDPE), o quarto é um furo preenchido com ar. Estes alvos possuem
valores tabelados e variam entre -1000 HU a +1000 HU. Utilizando a ferramenta de
ROI, selecionamos uma ROI circular sobre cada um dos alvos, registrando os
valores médios de sinal e de ruído em cada um deles. O que se espera com bom
resultado é que os valores medidos sejam próximos dos valores tabelados,
resultando em uma reta no gráfico comparativo entre esses valores (Figura 52).
60
Figura 51 Seleção de ROIs para teste de linearidade de número CT
Figura 52 Verificação da linearidade de número CT
!1200%
!800%
!400%
0%
400%
800%
1200%
!1200% !800% !400% 0% 400% 800% 1200%
Núm
ero'CT
'med
ido'
Número'CT'tabelado'
#CT'medido' Linear'(#CT'medido)'
61
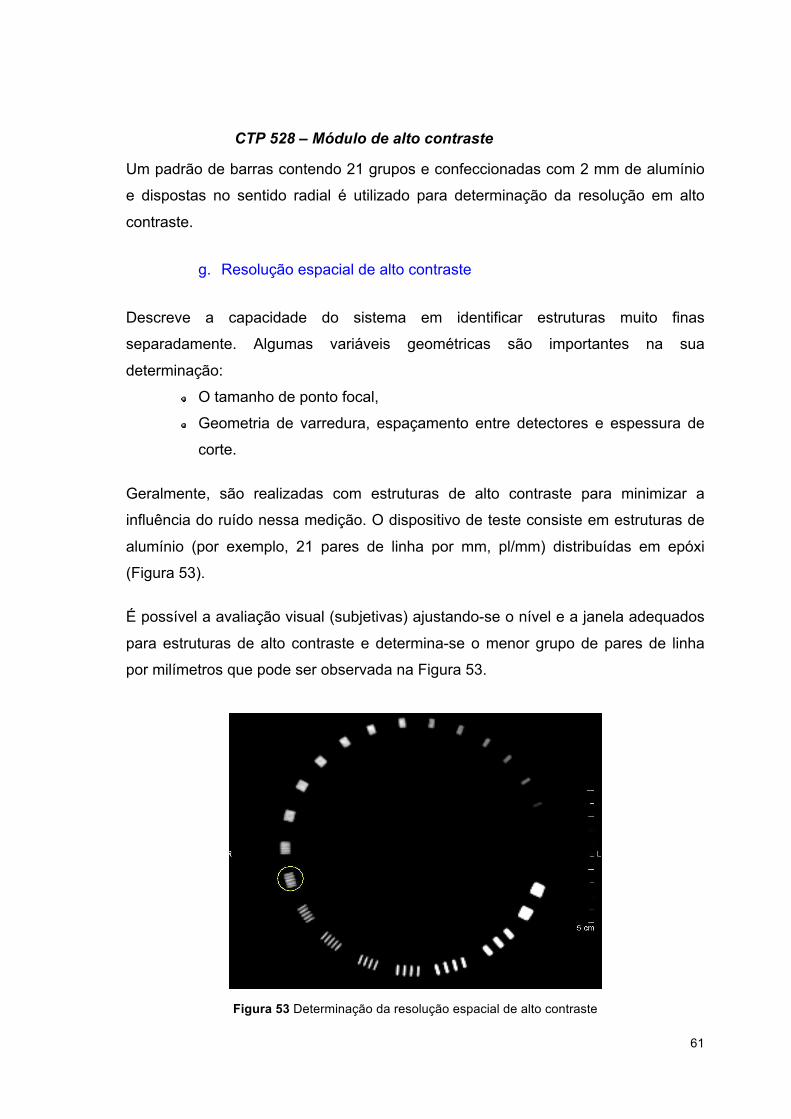
CTP 528 – Módulo de alto contraste
Um padrão de barras contendo 21 grupos e confeccionadas com 2 mm de alumínio
e dispostas no sentido radial é utilizado para determinação da resolução em alto
contraste.
g. Resolução espacial de alto contraste
Descreve a capacidade do sistema em identificar estruturas muito finas
separadamente. Algumas variáveis geométricas são importantes na sua
determinação:
O tamanho de ponto focal,
Geometria de varredura, espaçamento entre detectores e espessura de
corte.
Geralmente, são realizadas com estruturas de alto contraste para minimizar a
influência do ruído nessa medição. O dispositivo de teste consiste em estruturas de
alumínio (por exemplo, 21 pares de linha por mm, pl/mm) distribuídas em epóxi
(Figura 53).
É possível a avaliação visual (subjetivas) ajustando-se o nível e a janela adequados
para estruturas de alto contraste e determina-se o menor grupo de pares de linha
por milímetros que pode ser observada na Figura 53.
Figura 53 Determinação da resolução espacial de alto contraste
62
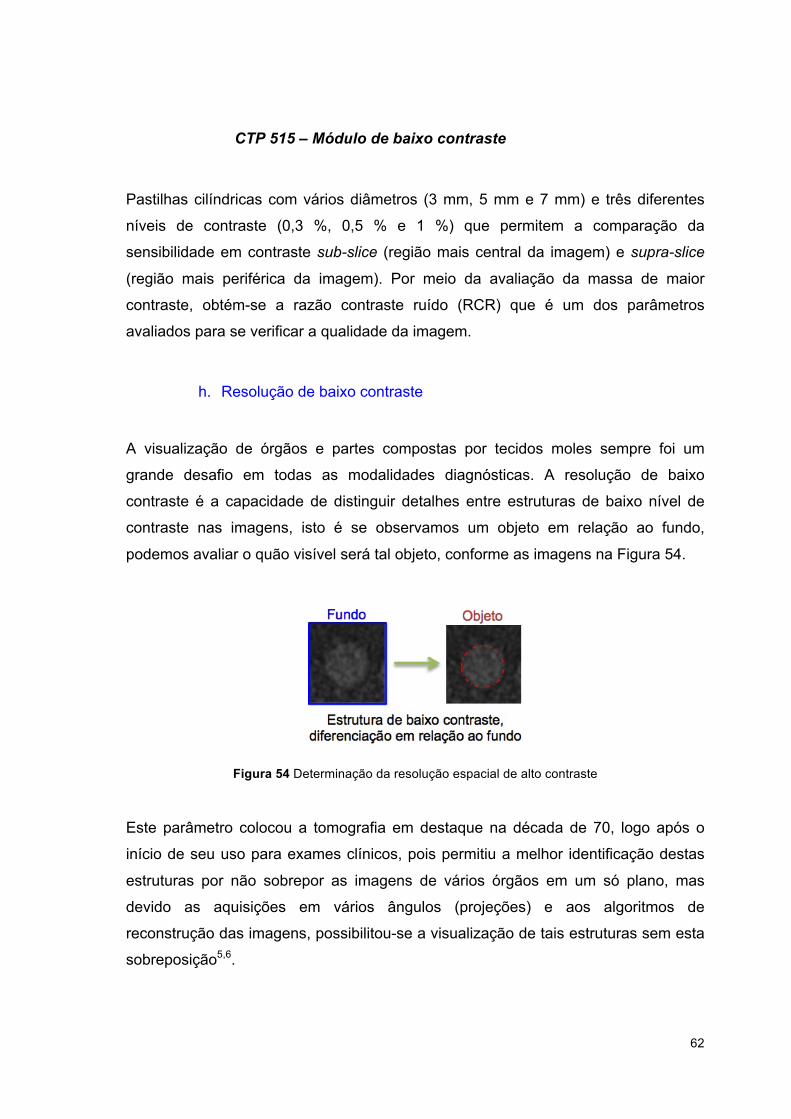
CTP 515 – Módulo de baixo contraste
Pastilhas cilíndricas com vários diâmetros (3 mm, 5 mm e 7 mm) e três diferentes
níveis de contraste (0,3 %, 0,5 % e 1 %) que permitem a comparação da
sensibilidade em contraste sub-slice (região mais central da imagem) e supra-slice
(região mais periférica da imagem). Por meio da avaliação da massa de maior
contraste, obtém-se a razão contraste ruído (RCR) que é um dos parâmetros
avaliados para se verificar a qualidade da imagem.
h. Resolução de baixo contraste
A visualização de órgãos e partes compostas por tecidos moles sempre foi um
grande desafio em todas as modalidades diagnósticas. A resolução de baixo
contraste é a capacidade de distinguir detalhes entre estruturas de baixo nível de
contraste nas imagens, isto é se observamos um objeto em relação ao fundo,
podemos avaliar o quão visível será tal objeto, conforme as imagens na Figura 54.
Figura 54 Determinação da resolução espacial de alto contraste
Este parâmetro colocou a tomografia em destaque na década de 70, logo após o
início de seu uso para exames clínicos, pois permitiu a melhor identificação destas
estruturas por não sobrepor as imagens de vários órgãos em um só plano, mas
devido as aquisições em vários ângulos (projeções) e aos algoritmos de
reconstrução das imagens, possibilitou-se a visualização de tais estruturas sem esta
sobreposição5,6.
63
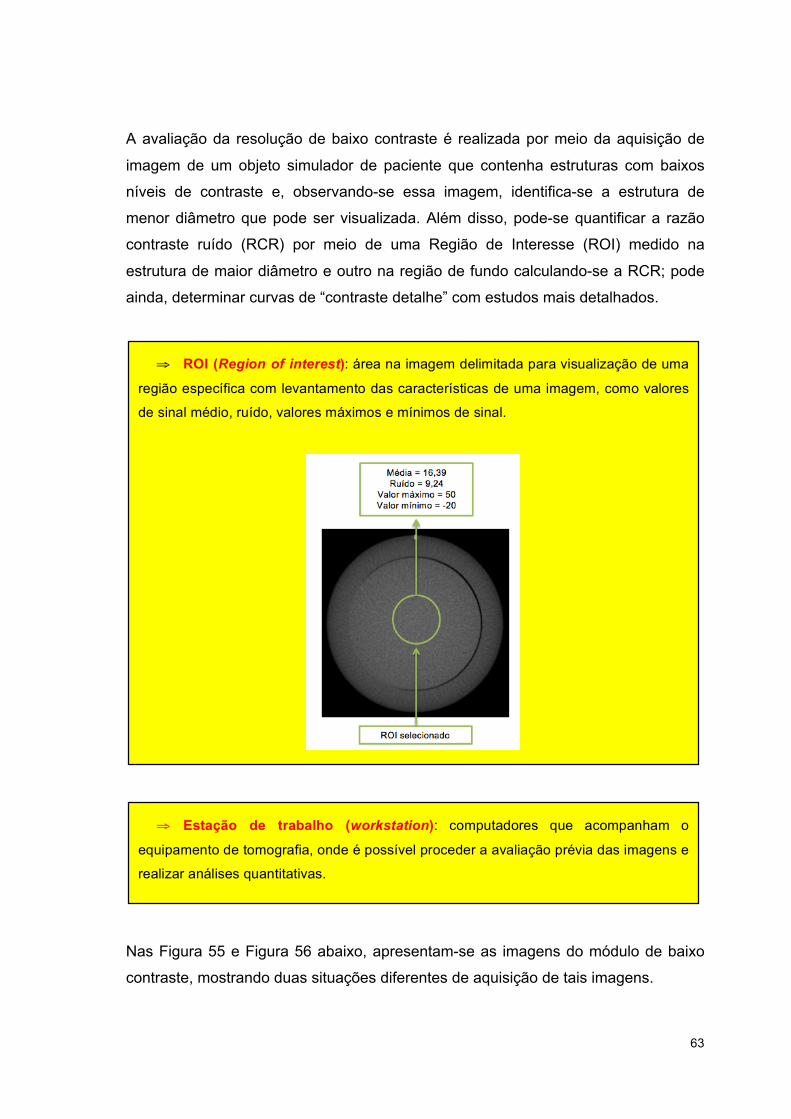
A avaliação da resolução de baixo contraste é realizada por meio da aquisição de
imagem de um objeto simulador de paciente que contenha estruturas com baixos
níveis de contraste e, observando-se essa imagem, identifica-se a estrutura de
menor diâmetro que pode ser visualizada. Além disso, pode-se quantificar a razão
contraste ruído (RCR) por meio de uma Região de Interesse (ROI) medido na
estrutura de maior diâmetro e outro na região de fundo calculando-se a RCR; pode
ainda, determinar curvas de “contraste detalhe” com estudos mais detalhados.
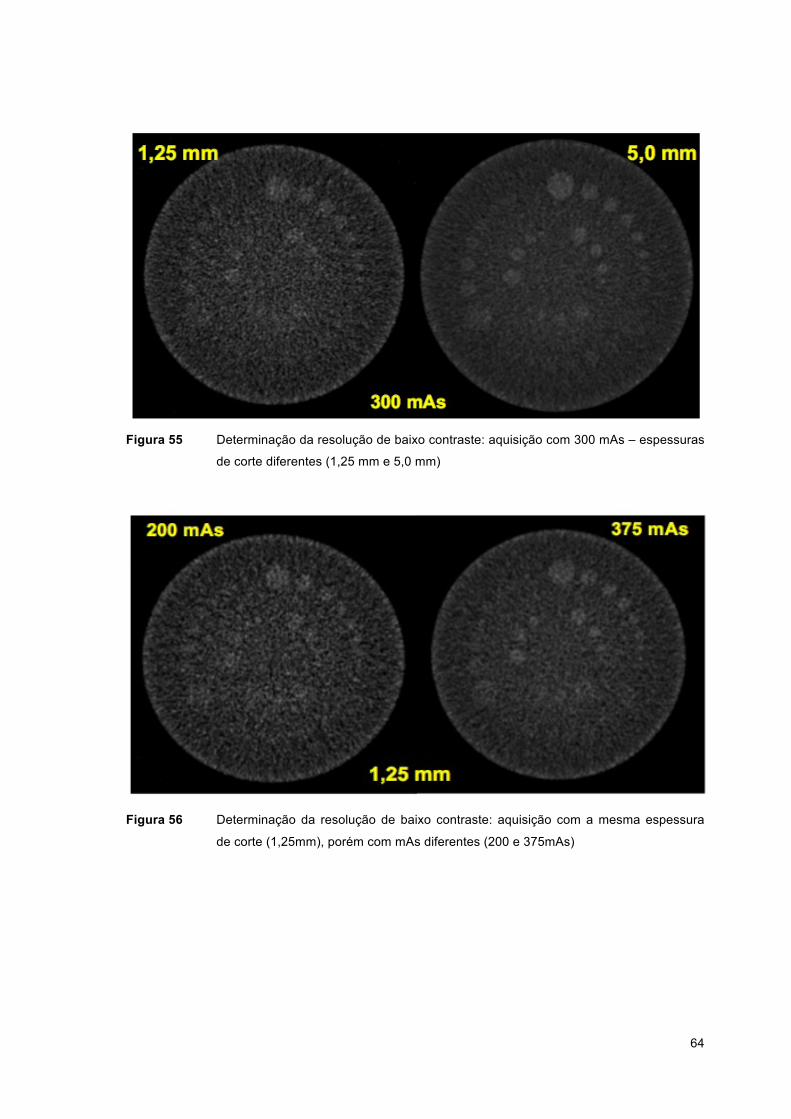
Nas Figura 55 e Figura 56 abaixo, apresentam-se as imagens do módulo de baixo
contraste, mostrando duas situações diferentes de aquisição de tais imagens.
⇒ ROI (Region of interest): área na imagem delimitada para visualização de uma
região específica com levantamento das características de uma imagem, como valores
de sinal médio, ruído, valores máximos e mínimos de sinal.
⇒ Estação de trabalho (workstation): computadores que acompanham o
equipamento de tomografia, onde é possível proceder a avaliação prévia das imagens e
realizar análises quantitativas.
64
Figura 55 Determinação da resolução de baixo contraste: aquisição com 300 mAs – espessuras
de corte diferentes (1,25 mm e 5,0 mm)
Figura 56 Determinação da resolução de baixo contraste: aquisição com a mesma espessura
de corte (1,25mm), porém com mAs diferentes (200 e 375mAs)
65
CTP 486 – Módulo de uniformidade
Feito de um material uniforme que possui equivalência com a água dentro de 2 %,
isto é, 20 HU e permite a verificação da uniformidade, bem como, a avaliação do
ruído e da razão sinal ruído (RSR) nos sistemas de tomografia.
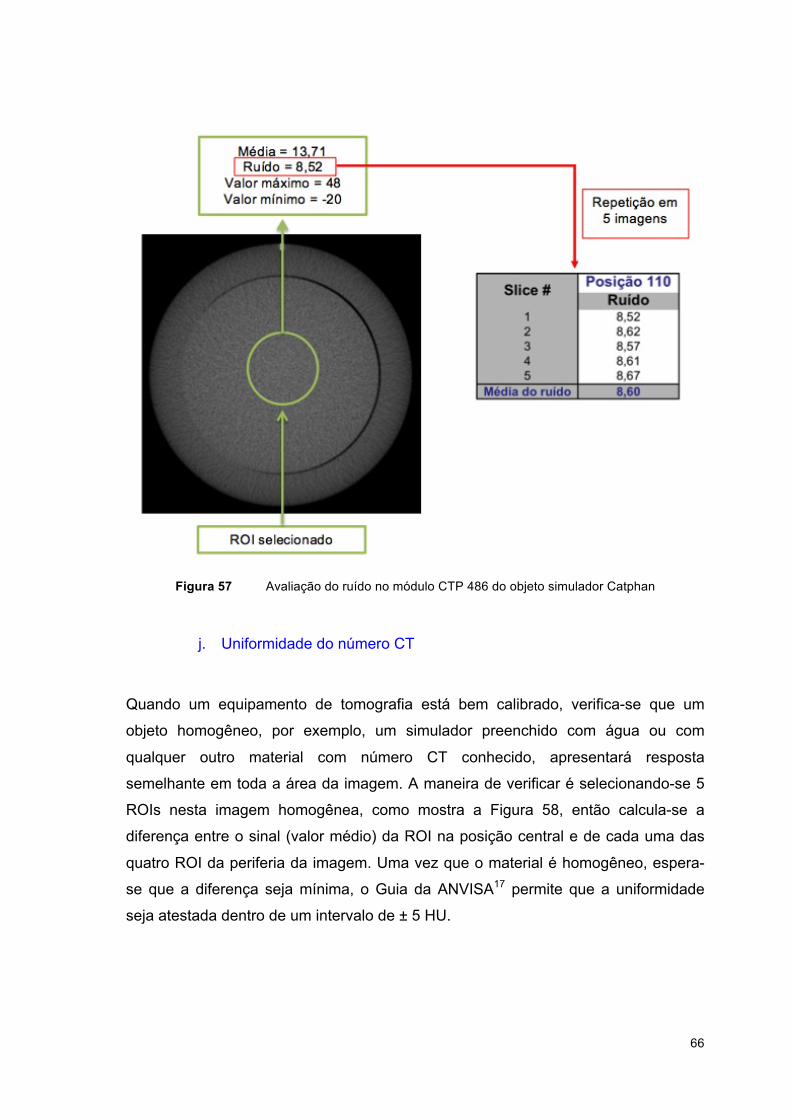
i. Ruído da imagem
O aspecto granulado que aparece na imagem é chamado de ruído, ele depende do:
Número de fótons de raios X que chegam ao detector (ruído quântico);
Ruído eletrônico do sistema de detecção; e
Escolha do filtro de reconstrução.
Dentre esses três, o predominante é o ruído quântico, que é influenciado
diretamente pela: tensão aplicada ao tubo e corrente, pelo filtro físico, espessura do
corte, espessura, composição da região do corpo em estudo e pelo algoritmo de
reconstrução.
A radiação obedece a uma relação matemática onde o ruído quântico é proporcional
a √N e a imagem correspondente é proporcional a 1/√N, onde N é o número de
fótons que contribui para reconstrução da imagem. Uma maneira muito prática de se
determinar o ruído é por meio do desvio padrão dos valores de número CT
(expressos em unidades Hounsfield, HU) dentro de uma ROI numa imagem de um
objeto simulador preenchido com água ou outro material homogêneo. O ruído é
avaliado realizando-se a média entre um grupo de imagens selecionando-se a ROI
na posição central em cada uma delas sendo realizadas de cinco a dez medições.
No Figura 57, foram selecionadas 5 ROIs de uma mesma “fatia” (slice) para então
calcular-se a média do ruído apresentado nesta aquisição.
66
Figura 57 Avaliação do ruído no módulo CTP 486 do objeto simulador Catphan
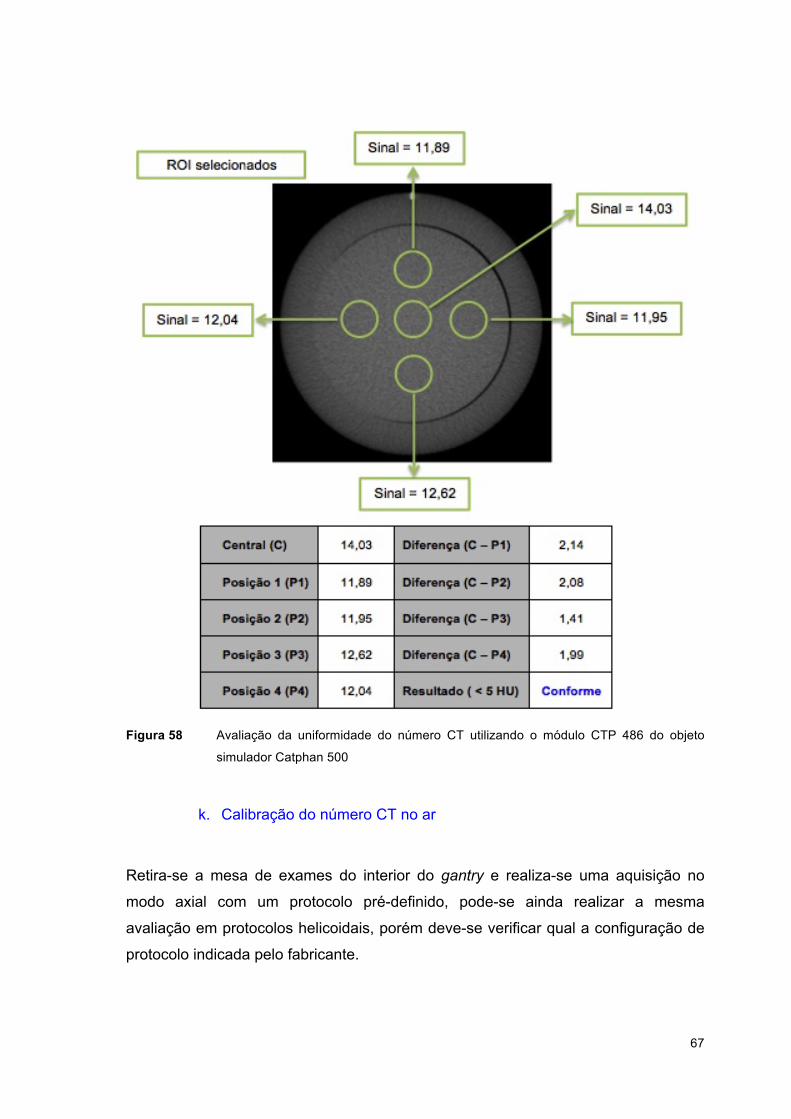
j. Uniformidade do número CT
Quando um equipamento de tomografia está bem calibrado, verifica-se que um
objeto homogêneo, por exemplo, um simulador preenchido com água ou com
qualquer outro material com número CT conhecido, apresentará resposta
semelhante em toda a área da imagem. A maneira de verificar é selecionando-se 5
ROIs nesta imagem homogênea, como mostra a Figura 58, então calcula-se a
diferença entre o sinal (valor médio) da ROI na posição central e de cada uma das
quatro ROI da periferia da imagem. Uma vez que o material é homogêneo, espera-
se que a diferença seja mínima, o Guia da ANVISA17 permite que a uniformidade
seja atestada dentro de um intervalo de ± 5 HU.
67
Figura 58 Avaliação da uniformidade do número CT utilizando o módulo CTP 486 do objeto
simulador Catphan 500
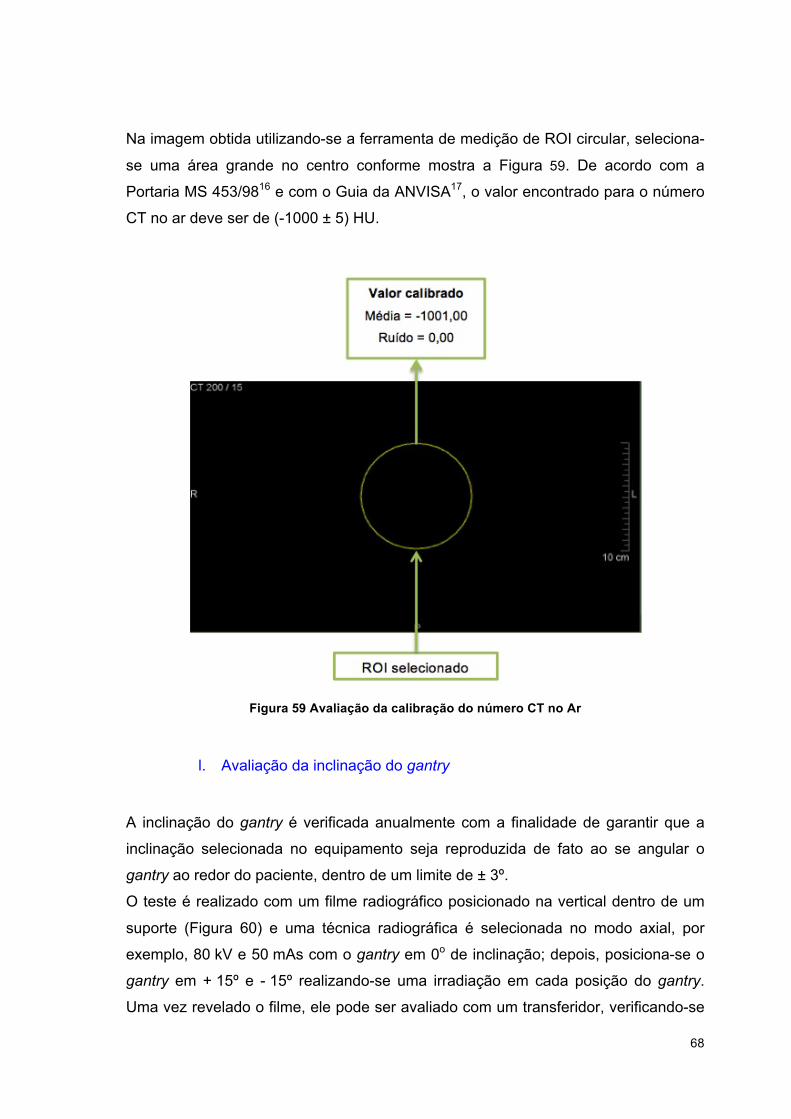
k. Calibração do número CT no ar
Retira-se a mesa de exames do interior do gantry e realiza-se uma aquisição no
modo axial com um protocolo pré-definido, pode-se ainda realizar a mesma
avaliação em protocolos helicoidais, porém deve-se verificar qual a configuração de
protocolo indicada pelo fabricante.
68
Na imagem obtida utilizando-se a ferramenta de medição de ROI circular, seleciona-
se uma área grande no centro conforme mostra a Figura 59. De acordo com a
Portaria MS 453/9816 e com o Guia da ANVISA17, o valor encontrado para o número
CT no ar deve ser de (-1000 ± 5) HU.
Figura 59 Avaliação da calibração do número CT no Ar
l. Avaliação da inclinação do gantry
A inclinação do gantry é verificada anualmente com a finalidade de garantir que a
inclinação selecionada no equipamento seja reproduzida de fato ao se angular o
gantry ao redor do paciente, dentro de um limite de ± 3º.
O teste é realizado com um filme radiográfico posicionado na vertical dentro de um
suporte (Figura 60) e uma técnica radiográfica é selecionada no modo axial, por
exemplo, 80 kV e 50 mAs com o gantry em 0o de inclinação; depois, posiciona-se o
gantry em + 15º e - 15º realizando-se uma irradiação em cada posição do gantry.
Uma vez revelado o filme, ele pode ser avaliado com um transferidor, verificando-se

69
a angulação obtida no feixe, ou então, ele pode ser digitalizado e a imagem ser
avaliada em um programa de computador que contenha ferramentas de medição de
ângulo.
Figura 60 Verificação da inclinação do gantry
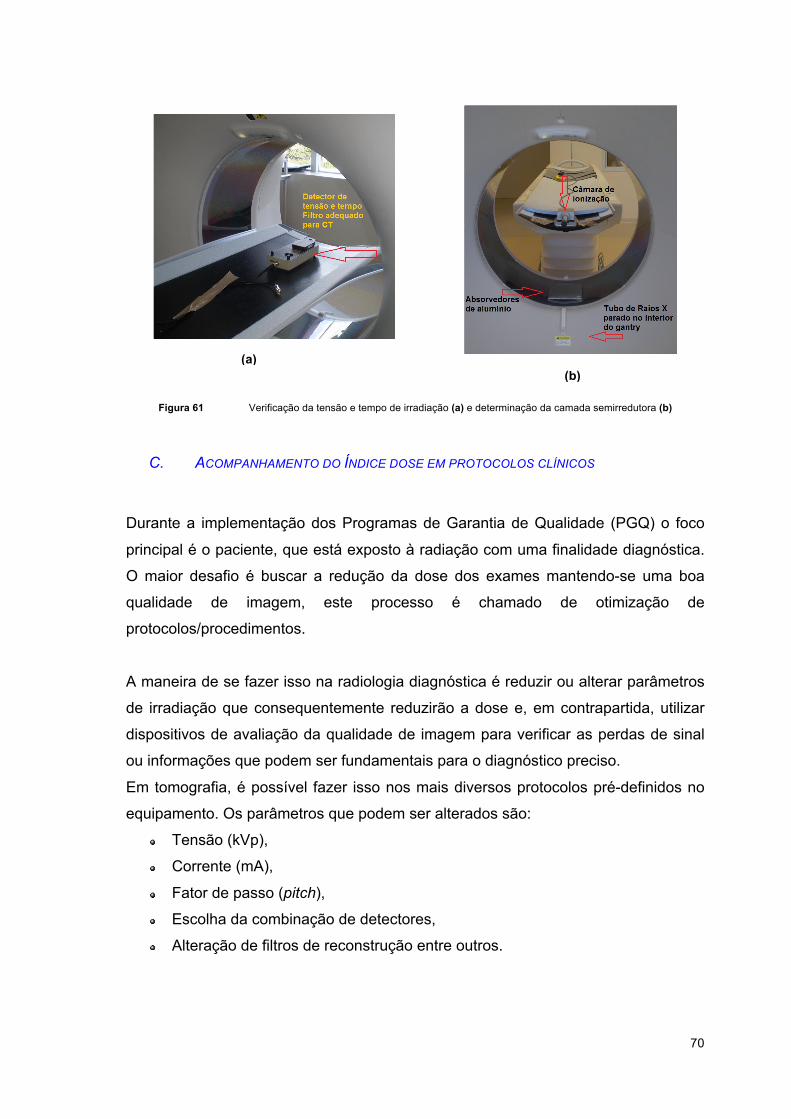
m. Avaliação de parâmetros elétricos e qualidade do feixe
A avaliação dos parâmetros elétricos é semelhante ao que se faz na radiologia
convencional. Mas, para que estas verificações sejam possíveis, é necessário parar
a rotação do tubo de raios X e executar os testes de controle de qualidade para
verificando se o equipamento está calibrado e reprodutível tanto para a tensão (kV)
quanto para o tempo de irradiação (s), considerando ± 10 % de variação permitida25.
Para realizar estes testes deve-se utilizar um detector que possua uma filtração
adequada ao feixe de radiação X utilizado em tomografia (Figura 61).
70
Figura 61 Verificação da tensão e tempo de irradiação (a) e determinação da camada semirredutora (b)
C. ACOMPANHAMENTO DO ÍNDICE DOSE EM PROTOCOLOS CLÍNICOS
Durante a implementação dos Programas de Garantia de Qualidade (PGQ) o foco
principal é o paciente, que está exposto à radiação com uma finalidade diagnóstica.
O maior desafio é buscar a redução da dose dos exames mantendo-se uma boa
qualidade de imagem, este processo é chamado de otimização de
protocolos/procedimentos.
A maneira de se fazer isso na radiologia diagnóstica é reduzir ou alterar parâmetros
de irradiação que consequentemente reduzirão a dose e, em contrapartida, utilizar
dispositivos de avaliação da qualidade de imagem para verificar as perdas de sinal
ou informações que podem ser fundamentais para o diagnóstico preciso.
Em tomografia, é possível fazer isso nos mais diversos protocolos pré-definidos no
equipamento. Os parâmetros que podem ser alterados são:
Tensão (kVp),
Corrente (mA),
Fator de passo (pitch),
Escolha da combinação de detectores,
Alteração de filtros de reconstrução entre outros.
(b) (a)
71
Tais escolhas precisam ser acordadas entre toda equipe multidisciplinar envolvida,
médicos, técnicos e físicos.
Avalia-se em três níveis:
Verificação do CTDI,
Quantificação dos parâmetros de qualidade de imagem com objeto simulador
físico e
Avaliação da qualidade de imagens clínicas de simuladores antropomórficos
(ou peças anatômicas).
Os resultados provenientes destas três etapas devem ser intercomparados e o
protocolo “otimizado” deverá ser escolhido como base, principalmente, na qualidade
da imagem antropomórfica. Após este estudo, é necessário ainda avaliar o impacto
na qualidade da imagem de pacientes, não só de objetos simuladores; para isto,
deve-se acordar, com o Serviço de saúde, como serão implementados os protocolos
otimizados na rotina clínica.
72
REFERÊNCIAS
1 Hsieh, J., Computed Tomography – Principles, Design, Artifacts and Recent Advances, Spie
Press, Bellingham, Washington, EUA, 2003
2 Buzug, T. M., Computed Tomography – From Phonton Statistics to Modern Cone-Beam CT,
Springer, Berlim, Germany, 2008
3 BUSHBERG, J. T. et al. The essencial Physics of Medical Imaging. 2. ed. Philadelphia: Lippincott
Williams & Wilkins, 2002
4 Bushong, S. C., Ciência Radiológica para tecnólogos – Física, Biologia e Proteção, tradução 9a
ed, Mosby Elsevier, Rio de Janeiro, Rio de Janeiro, Brasil, 2010
5Costa, P. R., Nersissian, D. Y., PET/CT em Oncologia - Princípios de Tomografia
Computadorizada, cap.3, p.19-34, São Paulo, São Paulo, Brasil, 2011
6 SEERAM, E., “Computed Tomography: Physical Principles, Clinical Applications,and Quality
Control”, 2nd ed, W.B. Saunders Company, Philadelphia, Pennsylvania, EUA, 2004
7 AMERICAN ASSOCIATION OF PHYSICS IN MEDICINE, The Measurement, Reporting, and
Managenment of Radiation Dose in CT, AAPM Report 96, 2008
8 Bushong, S. C., Computed Tomography – Essential of Medical Imaging Series, McGraw-Hill,
New York, EUA, 2000
9 WOLBARST, A. B., Physics of Radiology, Appleton & Lange, Connecticut, EUA,1993
10 KODEL, K. A., “Desenvolvimento e Caracterização de Cintiladores Cerâmicos de Tungstanato
de Cádmio”, 2006. Dissertação de Mestrado – Núcleo de Pós-Graduação de Física da Universidade
Federal de Sergipe.
11 DEPARTMENT OF HEALTH, “CT scanner automatic exposure control systems”, Report 05016,
February, 2005
73
12 KALENDER, W. A., “Computed Tomography: Fundamentals, System Technology, Image
Quality, Applications”, 2nd ed, Publics Corporate Publishing, GWA, Erlangen, Alemanha, 2005
13 JESSEN,K. A., SHRIMPTON, P. C., GELEIJNS, J., PANZER, W., TOSI, G. “Dosimetry for
optimization of patient protection in computed tomography ”, Applied Radiation and Isotopes, v. 50,
p. 165-172, 1999
14 KALENDER, W. A., “Computed Tomography: Fundamentals, System Technology, Image
Quality, Applications”, 2nd ed, Publics Corporate Publishing, GWA, Erlangen, Alemanha, 2005
15 BAUHS, J. A., McCOLLOUGH, C. H. et al “CT dosimetry: Comparison of Measurement
Techniques and Devices”, Radiographics, v. 28, n.1, p. 245-253, 2008
16 MINISTÉRIO DA SAÚDE. “Diretrizes de Proteção Radiológica em Radiodiagnóstico Médico e
Odontológico do Ministério da Saúde”. Diário Oficial da União. Brasília, de 02 de junho de 1998.
(Portaria MS 453/98)
17 MINISTÉRIO DA SAÚDE. Resolução RE 1016, “Guia: Radiodiagnóstico Médico - Segurança e
Desempenho de Equipamentos”, Diário Oficial da União de 03 de abril de 2006.
18 INTERNATIONAL ELETROTECHNICAL COMMISSION. Medical Electrical Equipment:
Particular Requirements for the Safety X-ray Equipment for Computed Tomography – Part 2-
44:, IEC 60601-2-44, 2002
19 INTERNATIONAL ELETROTECHNICAL COMMISSION. Evaluation and routine testing in
medical imaging departments – Part 2-6: Imaging performance of computed tomography X-ray
equipment, IEC 61223-2-6, 2006
20 AMERICAN ASSOCIATION OF PHYSICS IN MEDICINE - Comprehensive Methodology for the
Evaluation of Radiation Dose in X-Ray Computed Tomography - Diagnostic Imaging Council CT
Committee, AAPM Report 111, 2010
74
21 VERDUN, F. R., GUIERREZ, D. et al “CT Dose Optimization when Changing to CT Multi-
detector Row Technology”, Curr. Probl. Diagn. Radiol, agosto, 2007
22 PRIMAK, A. N., McCOLLOUGH, C. H. et al “Relationship between Noise, Dose and Pitch in
Cardiac Multi-Detector Row CT”, Radiographics, v. 26, n.6, p. 1785-1794, 2006
23 ImPACT, CT Scanner Acceptance Testing, Information Leaflet no. 1, version 1.02, 2001
24 THE PHANTOM LABORATORY. Catphan 500 and 600 manual. 2006
25 AMERICAN ASSOCIATION OF PHYSICS IN MEDICINE, Specification, and acceptance testing
computed tomography scanners, Committee on Quality Assurance in Tomography, AAPM Report
39, 1993
Related Documents











