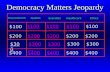
Today 1 3‐phase inverter (DC‐to‐AC ) + – a b c 0 V bus v a0 v b0 v c0 Q 1 D 1 D 2 Q 2 Q 3 D 3 D 4 Q 4 D 6 Q 6 D 5 Q 5 V bus i bus n T m rm rm i a i b i c PMSM + v a + v b + v c 3‐phase electric machine • Finish inverter+PMSM simulation example • Electric drive (inverter+PMSM): losses and efficiency • Overview of induction machine, an alternative to PMSM • Summary and conclusions

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Today
1
3‐phase inverter (DC‐to‐AC )
+–
abc
0
Vbus va0 vb0 vc0
Q1
D1
D2
Q2
Q3
D3
D4
Q4 D6Q6
D5Q5
Vbusibus
n
Tmrmrm
ia
ib
ic
PMSM+ va
+ vb
+ vc
3‐phase electric machine
• Finish inverter+PMSM simulation example• Electric drive (inverter+PMSM): losses and efficiency• Overview of induction machine, an alternative to PMSM• Summary and conclusions
-
Vector controlled electric drive(“field‐oriented”, “rotor reference frame” control)
2
+–
abc
0
Vbus va0 vb0 vc0
Q1
D1
D2
Q2
Q3
D3
D4
Q4 D6Q6
D5Q5
Vbusibus
n
Tmrmrm
ia
ib
ic
PMSM+ va
+ vb
+ vc
Id
Kr
Iq
r
Tref Iqref
Iq
Idref
Current‐loopcompensators PWM db
dc
Kr-1MP 12
32
Id
da
r
vqref
vdref
va0refvb0ref
vc0ref
-
Drive‐cycle example: 0‐60 mph‐0
3
Electric drive parameters:# of poles: P = 4Maximum torque: Tmmax = 200 NmMaximum current amplitude: 533 AFlux linkage M = 0.125 VsPhase resistance: r = 0.04 Phase inductance: L = 0.5 mHCurrent‐loop BW: 10 HzDC bus voltage: Vbus = 600 V
Top-level model of EV for use in ECEN 5017 course. Driving cycle is a speed-vs-time profile for the vehicle, operating on flat road. Driver uses torque command (gas & brake
pedals) to follow the reference speed.
Top-Level EV Model
m
Vref
speedsForces
Pdist
SOCIinvIbat
VbatvabciabcTm
iqd0vqd0dabc
Unit Conversion
Scope1
Scope
Electric VehicleDriver model
Driving cycleReference Speed
Vehicle Speed
Torque command(gas & brake pedals)
-
4
0 50 100 150 200 250 300 350 400 450 5000
20
40
60
80
Spe
ed [m
ph]
Reference SpeedVehicle Speed
0 50 100 150 200 250 300 350 400 450 500-200
-100
0
100
200To
rque
[Nm
]
Motor Torque
0 50 100 150 200 250 300 350 400 450 500-1000
-500
0
500
1000
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
0 50 100 150 200 250 300 350 400 450 500-200
-100
0
100
200
300
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
-
5
0 50 100 150 200 250 300 350 400 450 500-400
-200
0
200
400
Pha
se V
olta
ges
[V]
vavbvc
0 50 100 150 200 250 300 350 400 450 500-200
-100
0
100
200
300R
otor
Ref
. Frm
. Vol
tage
s [V
]
vqvdv0
0 50 100 150 200 250 300 350 400 450 500-1000
-500
0
500
1000
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
0 50 100 150 200 250 300 350 400 450 500-1000
-500
0
500
1000
Pha
se C
urre
nts
[A]
iaibic
-
6
0 50 100 150 200 250 300 350 400 450 5000
20
40
60
80
Spe
ed [m
ph]
Reference SpeedVehicle Speed
0 50 100 150 200 250 300 350 400 450 500-200
-100
0
100
200
Torq
ue [N
m]
Motor Torque
0 50 100 150 200 250 300 350 400 450 500-400
-200
0
200
400
Pha
se V
olta
ges
[V]
vavbvc
0 50 100 150 200 250 300 350 400 450 500-0.5
0
0.5
1
1.5
Pha
se D
uty
Cyc
les
dadbdc
-
7
249.8 250 250.2 250.4 250.6 250.8 2510
20
40
60
80
Spe
ed [m
ph]
Reference SpeedVehicle Speed
249.8 250 250.2 250.4 250.6 250.8 251-200
-150
-100
-50
0
50
Torq
ue [N
m]
Motor Torque
249.8 250 250.2 250.4 250.6 250.8 251-600
-400
-200
0
200
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
249.8 250 250.2 250.4 250.6 250.8 251-100
0
100
200
300
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
-
8
249.8 250 250.2 250.4 250.6 250.8 251-400
-200
0
200
400
Pha
se V
olta
ges
[V]
vavbvc
249.8 250 250.2 250.4 250.6 250.8 251-100
0
100
200
300
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
249.8 250 250.2 250.4 250.6 250.8 251-600
-400
-200
0
200
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
249.8 250 250.2 250.4 250.6 250.8 251-1000
-500
0
500
1000
Pha
se C
urre
nts
[A]
iaibic
-
9
249.8 250 250.2 250.4 250.6 250.8 2510
20
40
60
80
Spe
ed [m
ph]
Reference SpeedVehicle Speed
249.8 250 250.2 250.4 250.6 250.8 251-200
-150
-100
-50
0
50
Torq
ue [N
m]
Motor Torque
249.8 250 250.2 250.4 250.6 250.8 251-400
-200
0
200
400
Pha
se V
olta
ges
[V]
vavbvc
249.8 250 250.2 250.4 250.6 250.8 251-0.5
0
0.5
1
1.5
Pha
se D
uty
Cyc
les
dadbdc
-
10
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.154
56
58
60
Spe
ed [m
ph]
Reference SpeedVehicle Speed
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-20
-10
0
10
20
Torq
ue [N
m]
Motor Torque
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-40
-20
0
20
40
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-50
0
50
100
150
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
-
11
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-200
-100
0
100
200
Pha
se V
olta
ges
[V]
vavbvc
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-50
0
50
100
150
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-40
-20
0
20
40
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-40
-20
0
20
40
Pha
se C
urre
nts
[A]
iaibic
-
12
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.154
56
58
60
Spe
ed [m
ph]
Reference SpeedVehicle Speed
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-20
-10
0
10
20
Torq
ue [N
m]
Motor Torque
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.1-200
-100
0
100
200
Pha
se V
olta
ges
[V]
vavbvc
250.03 250.04 250.05 250.06 250.07 250.08 250.09 250.10.2
0.4
0.6
0.8
1
Pha
se D
uty
Cyc
les
dadbdc
-
13
269.96 269.98 270 270.02 270.04 270.06 270.08 270.10
0.5
1
1.5
2
Spe
ed [m
ph]
Reference SpeedVehicle Speed
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-11.4
-11.3
-11.2
-11.1
-11
-10.9
Torq
ue [N
m]
Motor Torque
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-40
-30
-20
-10
0
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
269.96 269.98 270 270.02 270.04 270.06 270.08 270.10
1
2
3
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
-
14
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-4
-2
0
2
4
Pha
se V
olta
ges
[V]
vavbvc
269.96 269.98 270 270.02 270.04 270.06 270.08 270.10
1
2
3
Rot
or R
ef. F
rm. V
olta
ges
[V]
vqvdv0
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-40
-30
-20
-10
0
Rot
or R
ef. F
rm. C
urre
nts
[A]
iqidi0
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-40
-20
0
20
40
Pha
se C
urre
nts
[A]
iaibic
-
15
269.96 269.98 270 270.02 270.04 270.06 270.08 270.10
0.5
1
1.5
2
Spe
ed [m
ph]
Reference SpeedVehicle Speed
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-11.4
-11.3
-11.2
-11.1
-11
-10.9To
rque
[Nm
]
Motor Torque
269.96 269.98 270 270.02 270.04 270.06 270.08 270.1-4
-2
0
2
4
Pha
se V
olta
ges
[V]
vavbvc
269.96 269.98 270 270.02 270.04 270.06 270.08 270.10.495
0.5
0.505
0.51
Pha
se D
uty
Cyc
les
dadbdc
-
PMSM Electric Drive Modeling and Control Conclusions
16
• PMSM dynamic model in rotor reference frame retains all dynamics but removes the need to look at angle dependences
• In steady state, rotor reference frame voltages and currents are all DC• Techniques used to extent speed range:
• DC bus voltage control using the Boost DC‐DC converter • Field‐weakening using the direct component of the current
• Modern electric drives employ “vector” i.e. “field‐oriented” control techniques based on the dynamic model in rotor reference frame
• Typical control systems includes inner current control loops that take advantage of the fact that torque produced is directly proportional to the quadrature component of the current
• 3‐phase inverters = 3 Buck converter legs, modulated to produce stator voltages necessary to generate requested stator currents. Voltage amplitude limited by the DC bus voltage. Typical switching frequency: kHz – 10’s kHz.
• Hierarchical modeling and control techniques• Switching transitions in the inverter or Boost DC‐DC converter:
-
PMSM drive averaged model, including losses
17
PMSM
+–
+–
+–
Vbus
ia
ib
ic
r
r
r
L
L
L
rm
rm
rm
rxa
rxb
rxc
vxa
vxb
vxc
dcVbusdbVbusdaVbusdaia dbib dcic
Isw
Ibus+
_
Inverter
0 ,
0 ,
aDaCESa
aDaCESaxa iVdVd
iVdVdv
0 ,0 ,
aDaCEa
aDaCEaxa iRdRd
iRdRdr
swcswbswasw IIII
-
PMSM drive efficiency map example
18
Evaluation of 2004 Toyota Prius Hybrid Electric Drive System(2005 report by Oak Ridge National Lab)
-
An alternative: Induction Machine
A two‐phase induction motor Tesla demonstrated in a lecture onMay 16, 1888, before the American Institute of Electrical Engineersat Columbia University. The motor developed 1/5 horsepower andshowed the commutator and brushes could be dispensed with.
Induction Machine (IM), also known as Asynchronous Machine• Short‐circuited rotor windings, “squirrel‐cage” rotor bars
• Rotor‐winding currents (rotor field) induced by stator currents
• Rotor speed not equal to synchronous speed, hence “asynchronous” machine
-
Induction Machine: principles of operation
20
Figure 6.12‐1 from P.Krause, O.Wasynczuk, S.Pekarek, Electromechanical Motion Devices, 2nd edition, Wiley 2012
• Stator voltages and currents are 3‐phase sinusoidal waveforms at electrical frequency
P = 2 poles
• Rotor turns at mechanical speede
rmr • Frequency of the current induced in the rotor is
reer • MMF vector generated by stator currents rotates at speed
e• MMF vector generated by rotor currents rotates at speed
eerr • Torque is generated by interaction between the stator and the rotor generated MMFs, both rotating at synchronous speed
e
-
Induction Machine: slip s
21
P = 2 pole machine
• Electrical frequency of stator voltages and currents = Speed of rotation of magnetic fields = Synchronous speed = Speed of rotation of synchronous reference frame =
• Mechanical speed of rotation =
• Slip frequency =
• Slip
e
r
erre
e
res
-
Induction Machine Equations in Synchronous Reference Frame
22
dseqs
qssqs dtd
irv
qseds
dssds dtdirv
drreqrqrr dtd
ir
0
qrredrdrr dtdir 0
qrMqssqs iLiL
drMdssds iLiL
0 qsMqrrqr iLiL
dsMdrrdr iLiL
qsdrr
Mqrdr iL
LPiPT 22
322
3
Flux linkagesVoltage equations
Stator dq
Rotor dq
Torque
-
Induction Machine:Torque in terms of stator currents
23
dtdir drdrr
0
qsdrr
Mqrdr iL
LPiPT 22
322
3
dtd
rLiL dr
r
rdrdsM
dsr
Mdr is
L
1
qsdsrr
M iisL
LPT
1
122
3 2
dsMdrrdr iLiL Eliminate idr and solve for dr
-
Induction Machine Equations: slip and synchronous frequency calculations
24
0 qsMqrrqr iLiL
qsr
Mqr iL
Li
drreqrrir 0
dr
qrrre
ir
dsr
Mdr is
L
1
dr
qs
r
Mrre
iLLr
where
-
Field‐oriented (vector) control of induction machine
25
+–
abc
0
Vbus va0 vb0 vc0
Q1
D1
D2
Q2
Q3
D3
D4
Q4 D6Q6
D5Q5
Vbusibus
n
Tmrmrm
ia
ib
ic
PMSM+ va
+ vb
+ vc
Ids
Kr
Iqs
e
Tref Iqsref
Iqs
Idref
Current‐loopcompensators PWM db
dc
Kr-1dsrefM
r
ILL
P12
32
2
Ids
da
e
vqsref
vdsref
va0refvb0ref
vc0ref
IM
Slip and sync.frequency& angle calc.
Iqsref
Idref rmIdsref
-
26
• Higher efficiency at low and medium speeds
• Simpler control• Active R&D
• Higher efficiency at high speeds• No need for rare‐earth permanent magnet materials, lower cost
• More mature motor technology
PMSM IM
Comparison of PMSM and IM
-
Another alternative: Variable Reluctance (VR)
27
Variable Reluctance (VR) machine, also Switched Reluctance machines
• Salient poles: inductance of the stator windings depends on position
• Many configurations possible
• Good efficiency over wide range of speeds
• Relatively low cost
• Pulsating torque, higher noise levels
• In R&D for automotive applications
-
More Research and Development Directions“Hub” or “In‐Wheel” Motors
28
Example:http://www.proteanelectric.com
Related Documents