THE OPTIMAL WALK TO THE RANDOM WALK Daniel Campos (Universitat Autònoma de Barcelona)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

THE OPTIMAL WALK
TO THE RANDOM WALK
Daniel Campos (Universitat Autònoma de Barcelona)

1. Introduction (Random search theory: applications and tools)
2. The optimal walk to the (Lévy) walk
3. The optimal walk to the (intermittent) walk
4. The optimal walk to the (myopic) walk
5. The optimal walk to the (mortal) walk
6. The optimal walk to the (systematic?) walk
Contents

1. Introduction (Random search theory: applications and tools)

A
B
The first-passage problem:
How do we measure search efficiency? i) Time distribution to the first passage: 𝑓(𝑡; 𝑥0)
ii) Mean time to the first passage: 𝑇 = 𝑡𝑓 𝑡; 𝑥0 𝑑𝑡∞
0
iii) First-passage probability up to time 𝑡𝑚: 𝑆 𝑡𝑚 = 𝑓 𝑡; 𝑥0 𝑑𝑡𝑡𝑚0
1. Introduction (Random search theory: applications and tools)
𝐿

A A
A
A
A
A
A
B B
B
B
B
B
Random search theory: 𝐴 + 𝐵 → 𝐴 We will describe the position of the 𝑖-th particle through a stochastic process 𝑋𝑖(𝑡).
1. Introduction (Random search theory: applications and tools)
𝐿

A A
A
A
A
A
A
B B
B
B
B
B
The target problem:
1. Introduction (Random search theory: applications and tools)
𝐿

A A
A
A
A
A
A
B B
B
B
B
B
The trapping problem:
1. Introduction (Random search theory: applications and tools)
𝐿

1. Introduction (Random search theory: applications and tools)

Movement ecology represents a new area of ecology which requires a detailed data processing of individual animal trajectories (obtained through telemmetry, GPS,…).
1. Introduction (Random search theory: applications and tools)

Search at the microscopic level
1. Introduction (Random search theory: applications and tools)

Human searches:
1. Introduction (Random search theory: applications and tools)
SAR applications
Experiments
Everyday experiences

A Wiener process 𝑊(𝑡) is defined as a stationary process whose increments 𝑊(𝑡2) −𝑊(𝑡1) follow a Gaussian distribution with zero mean and variance 𝑡2 − 𝑡1 .
If we assume that 𝑋 𝑡 = 𝑥0 + 2𝐷𝑊(𝑡) then: i) The probability density 𝑝(𝑥, 𝑡) follows a Gaussian distribution with 𝑋 = 𝑥0 and
𝑋2 = 2𝐷𝑡 + 𝑥02
ii) It becomes impossible to define a characteristic speed for A iii) The problem of infinite propagation signals emerge
…but the advantage is that we can describe 𝑋 𝑡 as a Gaussian (stable) process.
A
Types of motion (I): ‘Pure’ diffusion model
1. Introduction (Random search theory: applications and tools)

We define the position of the particle after 𝑛 jumps as: 𝑋𝑛 = 𝑍𝑖𝑛𝑖=1
…and the time it takes to perform these 𝑛 jumps as: 𝑇𝑛 = Θ𝑖𝑛𝑖=1
…where 𝑍𝑖 and Θ𝑖 each are i.i.d. random variables distributed, respectively, according to
ϕ 𝑥 : Jump-length probability distribution function (dispersal kernel) 𝜑 𝑡 : Waiting-time probability distribution function
(This is typically known as a Continuous-Time Random Walk –CTRW- and includes the Lévy Flight case as a particular case)
A
Types of motion (II): ‘Jump’ model
1. Introduction (Random search theory: applications and tools)

We use the same definition as before 𝑋𝑛 = 𝑍𝑖𝑛𝑖=1 𝑇𝑛 = Θ𝑖
𝑛𝑖=1
…where now 𝜑 𝑡 and ϕ 𝑥 are not independent, but coupled through a velocity distribution ℎ(𝑣) in the form
ϕ 𝑥 = 𝑑𝑡∞
0
𝜑(𝑡) 𝑑𝑡 𝛿 𝑥 − 𝑣𝑡 ℎ(𝑣)∞
−∞
(This is typically known as the “velocity version” of the CTRW, and includes the Lévy walk case, together with some other that ‘mimic’ the Ornstein-Uhlenbeck process in 𝑣)
A
Types of motion (III): ‘Velocity’ model
CTRW Velocity CTRW
𝑣1 𝑣2
𝑣3
1. Introduction (Random search theory: applications and tools)
𝑋(𝑡)

Direct resolution: We formally define the problem as 𝐿𝐹𝑃 𝑝(𝑥, 𝑡) = 0 with boundary condition 𝑝(𝛺, 𝑡) = 0, being 𝛺 the surface of the target, and computing the flux at 𝛺. For the
Wiener process, for example, 𝐿𝐹𝑃 =𝜕
𝜕𝑡− 𝐷
𝜕2
𝜕𝑥2.
Master equation approach: For the Bernoulli random walk (with probability ½ to each side, jump size 𝑎 and waiting time 𝜏) we have
𝑇 𝑥0 =1
2𝑇 𝑥0 + 𝑎 + 𝜏 +
1
2𝑇 𝑥0 − 𝑎 + 𝜏
𝑎2
2𝜏 𝜕2 𝑇 (𝑥0)
𝜕𝑥02
= −1
𝑇 (𝑥0) =𝑥0 𝐿 − 𝑥0 𝜏
𝑎2
Methods for finding 𝑓(𝑡) and/or 𝑇
1. Introduction (Random search theory: applications and tools)

Methods for finding 𝑓(𝑡) and/or 𝑇
The renewal approach We assume one target located at 𝑥 = 𝑥𝑡 and introduce 𝑘𝑛(𝑡; 𝑥0) as the rate at which the 𝑛-th passage occurs. Using a renewal assumption we have
𝑘 𝑡; 𝑥0 𝑑𝑡 = 𝑘1 𝑡; 𝑥0 𝑑𝑡 + 𝑘2 𝑡; 𝑥0 𝑑𝑡 + 𝑘3 𝑡; 𝑥0 𝑑𝑡 + ⋯ = = 𝑓 𝑡; 𝑥0 + 𝑓 𝑡; 𝑥0 ∗ 𝑓 𝑡; 𝑥𝑡 + 𝑓 𝑡; 𝑥0 ∗ 𝑓 𝑡; 𝑥𝑡 ∗ 𝑓 𝑡; 𝑥𝑡 +⋯ 𝑑𝑡
𝑘 𝑠; 𝑥0 = 𝑓 𝑠; 𝑥0 𝑓 𝑠; 𝑥𝑡𝑖
∞
𝑖=0
=𝑓(𝑠; 𝑥0)
1 − 𝑓(𝑠; 𝑥𝑡)
𝑓 𝑠; 𝑥0 =𝑘(𝑠; 𝑥0)
1 + 𝑘(𝑠; 𝑥𝑡)
1. Introduction (Random search theory: applications and tools)

𝑻𝟏
An essential advantage of this framework is that it allows a very general and intuitive understanding of the Mean First Passage Time (MFPT):
𝑇 = 𝑑𝑡 𝑡𝑓(𝑡; 𝑥0)∞
0
= lim𝑠→0
𝑑𝑓(𝑠; 𝑥0)
𝑑𝑠= lim
𝑠→0
𝑘∗ 𝑠; 𝑥𝑡𝑘(∞)
−𝑘∗(𝑠; 𝑥0)
𝑘 ∞+
1
𝑘(∞)
𝑻𝟐
1. Introduction (Random search theory: applications and tools)

2. The optimal walk to the (Lévy) walk

WHAT ARE LEVY FLIGHTS AND LEVY WALKS?
The Lévy Flight fits our ‘jump’ model scheme with ϕ 𝑥 a jump length distribution which decays according to lim
𝑡→∞ϕ 𝑥 ~𝑥−𝜇, with 1 < 𝜇 < 3
The Lévy Walk fits our ‘velocity’ model scheme, with 𝑣 fixed and 𝜑 𝑡 a flight time distribution which decays according to lim
𝑡→∞𝜑 𝑡 ~𝑡−𝜇, with 1 < 𝜇 < 3.
Note that this implies that 𝑥𝑞 ≡ 𝑑𝑥ϕ 𝑥 𝑥𝑞∞
−∞ and 𝑡𝑞 ≡
𝑑𝑡𝜑(𝑡)𝑡𝑞∞
0, respectively, diverge for 𝑞 − 𝜇 ≥ −1
In the Lévy Flight case these divergences extend to the overall behavior of the particle, so 𝑋2 also diverges. In contrast, for the Lévy Walk case, thanks to the coupling between flight durations and lengths through 𝑣:
𝑋2 ~ 𝑡2 , 1 < 𝜇 < 2
𝑡4−𝜇 , 2 < 𝜇 < 3
2. The optimal walk to the (Lévy) walk

2. The optimal walk to the (Lévy) walk
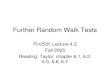
THE LÉVY FLIGHT OPTIMAL SOLUTION
Define the search efficiency 1
𝑙 𝑁 , where 𝑙 is the mean flight distance between
targets and 𝑁 the mean number of flights to cover the distance between targets Given ϕ 𝑥 ~𝑥−𝜇 and a mean path between targets of 𝛽,
𝑙 ≈ 𝑑𝑥 𝑥1−𝜇𝛽
0+ 𝛽 𝑑𝑥 𝑥−𝜇∞
𝛽
𝑑𝑥 𝑥−𝜇∞
0
and the mean number of flights satisfies 𝑁~𝛽(𝜇−1)/2 if the target is close enough. All this leads to a search efficiency optimization for 𝜇 = 2. INTUITIVE MEANING Optimal ballistic approach Optimal reorientation (‘correction’)
0 𝐿 0 𝐿
(Viswanathan et. al. Nature 401, 911 (1999)

2. The optimal walk to the (Lévy) walk
THE LEVY FLIGHT FORAGING HYPOTHESIS “Given Lévy Flight optimality, evolution should have favoured sensorymotor mechanisms that facilitate the emergence of motion patterns similar to the Lévy case in search situations of poor information.”

ARE LÉVY FLIGHTS SO SPECIAL?
2. The optimal walk to the (Lévy) walk

3. The optimal walk to the (intermittent) walk

Practical example 1: DNA facilitated target location (1D sliding + jumping)
3. The optimal walk to the (intermittent) walk
Practical example 2: Saltatory search strategies

3. The optimal walk to the (intermittent) walk
O. Bénichou et. al. Rev. Mod. Phys. 83, 81 (2011)

3. The optimal walk to the (intermittent) walk
Static mode (1D)
For a domain of size b:

3. The optimal walk to the (intermittent) walk
Diffusive mode (1D) 𝑏𝐷2 < 𝑎3𝑉2 𝑏𝐷2 > 𝑎3𝑉2

3. The optimal walk to the (intermittent) walk
Diffusive mode (1D) O. Bénichou et. al. Phys. Rev. Lett. 94, 198101 (2005)
𝜏1 ≫ 𝐷/𝑉2 𝜏1 ≪ 𝐷/𝑉2

4. The optimal walk to the (myopic) walk

4. The optimal walk to the (myopic) walk
For a constant probability 𝛼 of detection, 𝑘 𝑡; 𝑥0 → 𝛼𝑘(𝑡; 𝑥0) For a speed-dependent probability 𝛼 = 𝛼(𝑣): In general, 𝛼 = 𝛼(𝑥, 𝑣, 𝑡):
𝑘 𝑡; 𝑥0 𝑑𝑡 = 𝑑𝑣∞
0
𝑑𝑥0
0−𝑣𝑑𝑡
𝛼(𝑣)𝑝 𝑥, 𝑣, 𝑡; 𝑥0 + 𝑑𝑣0
−∞
𝑑𝑥𝑣𝑑𝑡
0
𝛼(𝑣)𝑝 𝑥, 𝑣, 𝑡; 𝑥0 ≈
≈ 𝑑𝑣∞
0
𝑣𝛼(𝑣)𝑝 0, 𝑣, 𝑡; 𝑥0 𝑑𝑡 + 𝑑𝑣0
−∞
𝑣𝛼(𝑣)𝑝 0, 𝑣, 𝑡; 𝑥0 𝑑𝑡
𝑘 𝑡; 𝑥0 𝑑𝑡 ≈ 𝑑𝑣∞
0
𝑣𝛼 𝑥, 𝑣, 𝑡 𝑝 0, 𝑣, 𝑡; 𝑥0 𝑑𝑡 − 𝑑𝑣0
−∞
𝑣𝛼(𝑥, 𝑣, 𝑡)𝑝 0, 𝑣, 𝑡; 𝑥0 𝑑𝑡

4. The optimal walk to the (myopic) walk
𝑻𝟏
𝑻𝟐
Case 1D ‘velocity’ model with 𝑣 fixed and 𝜑 𝑡 = 𝜆𝑒−𝜆𝑡 or 𝜑 𝑠 = 𝑒−𝑎 𝑘 𝜇, 𝛼 = 𝑒−𝛾𝑣
𝑇 =2𝑥0 𝐿−𝑥0 𝜆
𝑣2+
𝐿
𝑣𝛼(𝑣)

4. The optimal walk to the (myopic) walk
𝑻𝟏
𝑻𝟐
Case 2D or higher ‘velocity’ model with 𝑣 fixed and 𝜑 𝑡 = 𝜆𝑒−𝜆𝑡, 𝛼 = 𝑒−𝛾𝑣
𝑇 =𝐿2
𝑣2𝑔𝑑 𝑥0 +
𝐿𝑑
𝐴𝑣𝛼(𝑣)=
𝐿2
𝑣2𝑔𝑑 𝑥0 +
1
𝜌
1
𝐴𝑣𝛼(𝑣)

4. The optimal walk to the (myopic) walk
Case 2D with 𝑣 fixed and 𝜑 𝑡 = 𝜆𝑒−𝜆𝑡 or 𝜑 𝑠 = 𝑒−𝑎 𝑘 𝜇, 𝛼 = 𝑒−𝛾𝑣

5. The optimal walk to the (mortal) walk

For a constant mortality rate 𝜔: Here 𝑆(∞) is the most relevant parameter: For the ‘pure’ diffusion model:
For the ‘velocity’ model with 𝑣 fixed and 𝜑 𝑡 = 𝜆𝑒−𝜆𝑡:
𝑘 𝑡; 𝑥0 → 𝑒−𝜔𝑡𝑘(𝑡; 𝑥0) → 𝑘 𝑠; 𝑥0 → 𝑘 𝑠 + 𝜔; 𝑥0 → 𝑓 𝑠; 𝑥0 =𝑘(𝑠+𝜔;𝑥0)
1+𝑘(𝑠+𝜔;𝑥𝑡)
𝑆 ∞ = 𝑑𝑡 𝑓(𝑡; 𝑥0)∞
0
= lim𝑠→0
𝑑𝑡 𝑒−𝑠𝑡𝑓(𝑡; 𝑥0)∞
0
= lim𝑠→0
𝑓(𝑠; 𝑥0)
𝑆 ∞ = 1 −𝜔(𝜔 + 𝜆) 𝑒− 𝜔 𝜔+𝜆 𝑥0/𝑣 + 𝑒− 𝜔 𝜔+𝜆 𝐿−𝑥0 /𝑣
𝜔 1 − 𝑒− 𝜔 𝜔+𝜆 𝐿/𝑣 + 𝜔(𝜔 + 𝜆) 1 + 𝑒− 𝜔 𝜔+𝜆 𝐿/𝑣
𝑆 ∞ = 1 −𝜔𝜆 𝑒− 𝜔𝜆 𝑥0/𝑣 + 𝑒− 𝜔𝜆 𝐿−𝑥0 /𝑣
1 + 𝑒− 𝜔𝜆 𝐿/𝑣
5. The optimal walk to the (mortal) walk

Implications for the Lévy flight paradigm:
5. The optimal walk to the (mortal) walk

6. The optimal walk to the (systematic?) walk

NON-PERFECT DETECTION: SACCADE-FIXATION MECHANISM
𝑐 = 1 𝑐 = 0.2
6. The optimal walk to the (systematic?) walk

6. The optimal walk to the (systematic?) walk
Optimal search theory:
“Random” search

6. The optimal walk to the (systematic?) walk
Optimal effort allocation vs optimal path planning
Parallel Sweep (PS)
Archimedean spiral (AS)

6. The optimal walk to the (systematic?) walk
Errors in pattern sizing

6. The optimal walk to the (systematic?) walk
Errors in prior information

6. The optimal walk to the (systematic?) walk
Example: Ellberg’s paradox
30 balls Red: 10 Yellow+Black: 20
Does it make any sense to foresee human errors? According to psychologycal research during the last 50 years, yes

6. The optimal walk to the (systematic?) walk

Collaborators: Vicenç Méndez
Universitat Autònoma de Barcelona
Frederic Bartumeus Centre d’Estudis Avançats de Blanes, Girona
Xavier Espadaler
Jordi Catalán John Palmer
Centre de Recerca Ecològica i Aplicacions Forestals, UAB
Enrique Abad Santos Bravo Yuste
Universidad de Extremadura
Will Ryu University of Toronto
José Soares de Andrade Jr
Universidade Federal do Ceará
Katja Lindenberg University of California San Diego
Related Documents