616 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 5, MAY 2005 An Optimal Nonlinear Extension of Linear Filters Based on Distributed Arithmetic David Akopian, Senior Member, IEEE, and Jaakko Astola, Fellow, IEEE Abstract—Distributed arithmetic (DA)-based implementation of linear filters relies on the linear nature of this operation and has been suggested as a multiplication free solution. In this work, we introduce a nonlinear extension of linear filters optimizing under mean-square error criterion the memory function [(MF) multi- variate Boolean function with not only binary output] which is in the core of DA based implementation. Such an extension will improve the filtering of noise which may contain non-Gaussian components without increasing the complexity of implementation. Experiments on real images have shown the superiority of the pro- posed filters over the optimal linear filters. Different versions of these filters are also considered for an impulsive noise removal, faster processing, and filtering using large input data windows. Index Terms—Distributed arithmetic (DA), linear filters, non- linear filters. I. INTRODUCTION D ISTRIBUTED arithmetic (DA)-based implementation of linear filters has been suggested as a multiplication free alternative to conventional methods [1], [2]. It is based on a function of binary arguments, which is called a memory func- tion (MF) in this paper. For linear filters, MF is derived from the filter coefficients. The distributed implementation is shown in Fig. 1. This structure contains more degrees of freedom than the underlying linear filter. In other words, MF can be chosen optimally without restricting it to be of a certain form. Thus, by a suitable choice of the MF, one can achieve better performance in restoration of noisy images without increasing complexity of the implementation. Analyzing the general DA structure for linear filters one can note that it operates on binary vectors obtained from the bi- nary-radix representation of input data. Well-known stack [3], generalized stack [4], threshold Boolean filters (TBFs) [5], and extended threshold Boolean filters (ETBFs) [6], [7] are pro- cessing binary vectors obtained from the unary-radix represen- tation otherwise called threshold decomposition. Based on this observation, the class of microstatistic filters has also been in- troduced in [8] as an extension of linear filters, where different binary slices are processed by different linear filters. The re- cently introduced class of ETBF filters is a wide generalization of linear, stack, and TBF filters, but its complexity is greater than Manuscript received August 7, 2003; revised June 8, 2004. The associate ed- itor coordinating the review of this manuscript and approving it for publication was Dr. Tamas Sziranyi. D. Akopian is with the Electrical Engineering Department, The Uni- versity of Texas at San Antonio, San Antonio, TX 78249 USA (e-mail: [email protected]). J. Astola is with the Institute of Signal Processing, Tampere University of Technology, FIN-33101, Tampere, Finland (e-mail: [email protected].fi). Digital Object Identifier 10.1109/TIP.2005.846023 Fig. 1. DA-based implementation of linear filters and BMBF. memory-call operations and real multiplications and ad- ditions, where is the filter window length. This is due to the fact that the number of different threshold binary slices is at most. All of the above-mentioned extensions result in a complexity increase, while we suggest an approach which aims at a better utilization of the available resources. The proposed filter has the complexity of DA-based linear filter, i.e., requires memory-call operations and additions, where is the number of bits in a binary representation of input data. It also preserves the efficient on-the-fly computational structure. We will also consider several extensions of the proposed fil- ters. In particular, the optimal selection of MFs for each binary slice in the binary-radix representation will also be addressed in the manner analogous to the microstatistic filters. Many other nonlinear filters have been introduced to improve filtering performance in non-Gaussian noise, to better preserve details, and to meet other requirements. Some of them contain linear filters as components (see, e.g., [9]–[12]). Our goal in this paper is to generalize linear filters without the complexity increase and to suggest an optimization approach for this non- linear extension. Then, this new filter type can be used as a com- ponent of advanced nonlinear filters. As a case study, we will re- place the linear component of the well-known L-filters [11] by our extension, thus generalizing well known classes of L- and order-statistic filters. This paper is organized as follows. Section II reviews the DA-based linear filter implementations. Section III describes the new approach and several modifications. In Section IV, we present simulation results. II. DA-BASED IMPLEMENTATION OF LINEAR FILTERS Suppose that is a discrete time multi- level process. Without loss of generality, , , and 1057-7149/$20.00 © 2005 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
616 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 5, MAY 2005
An Optimal Nonlinear Extension of LinearFilters Based on Distributed Arithmetic
David Akopian, Senior Member, IEEE, and Jaakko Astola, Fellow, IEEE
Abstract—Distributed arithmetic (DA)-based implementation oflinear filters relies on the linear nature of this operation and hasbeen suggested as a multiplication free solution. In this work, weintroduce a nonlinear extension of linear filters optimizing undermean-square error criterion the memory function [(MF) multi-variate Boolean function with not only binary output] which isin the core of DA based implementation. Such an extension willimprove the filtering of noise which may contain non-Gaussiancomponents without increasing the complexity of implementation.Experiments on real images have shown the superiority of the pro-posed filters over the optimal linear filters. Different versions ofthese filters are also considered for an impulsive noise removal,faster processing, and filtering using large input data windows.
Index Terms—Distributed arithmetic (DA), linear filters, non-linear filters.
I. INTRODUCTION
D ISTRIBUTED arithmetic (DA)-based implementation oflinear filters has been suggested as a multiplication free
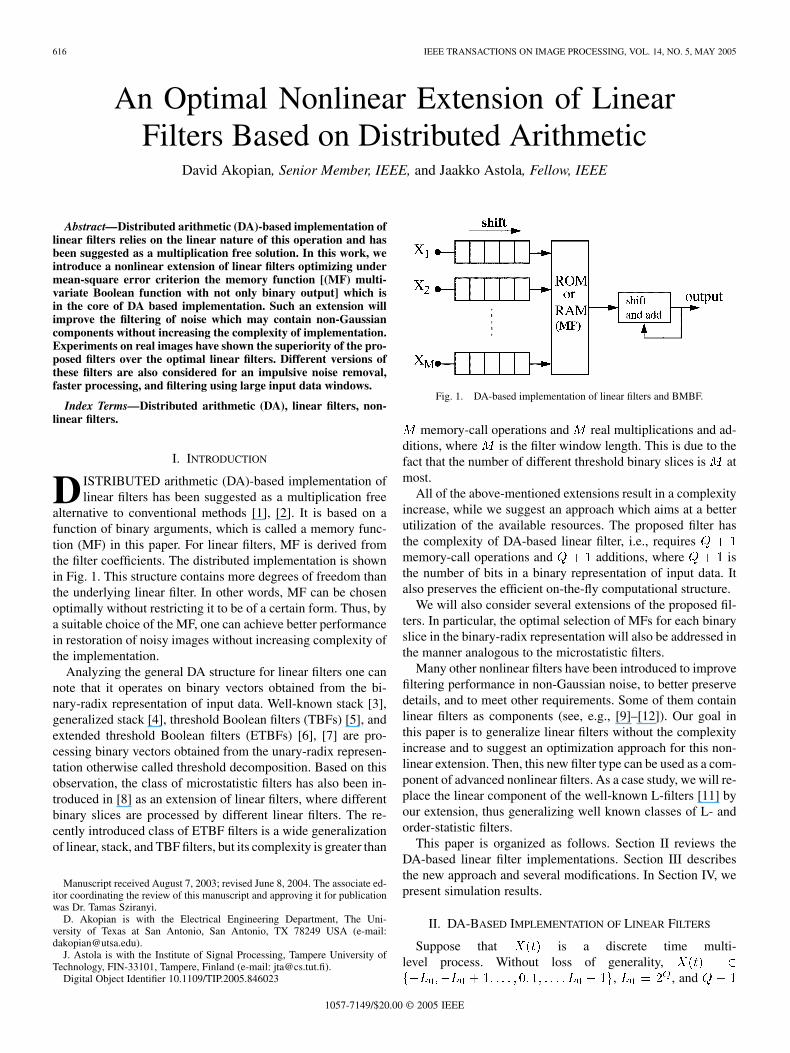
alternative to conventional methods [1], [2]. It is based on afunction of binary arguments, which is called a memory func-tion (MF) in this paper. For linear filters, MF is derived fromthe filter coefficients. The distributed implementation is shownin Fig. 1. This structure contains more degrees of freedom thanthe underlying linear filter. In other words, MF can be chosenoptimally without restricting it to be of a certain form. Thus, bya suitable choice of the MF, one can achieve better performancein restoration of noisy images without increasing complexity ofthe implementation.
Analyzing the general DA structure for linear filters one cannote that it operates on binary vectors obtained from the bi-nary-radix representation of input data. Well-known stack [3],generalized stack [4], threshold Boolean filters (TBFs) [5], andextended threshold Boolean filters (ETBFs) [6], [7] are pro-cessing binary vectors obtained from the unary-radix represen-tation otherwise called threshold decomposition. Based on thisobservation, the class of microstatistic filters has also been in-troduced in [8] as an extension of linear filters, where differentbinary slices are processed by different linear filters. The re-cently introduced class of ETBF filters is a wide generalizationof linear, stack, and TBF filters, but its complexity is greater than
Manuscript received August 7, 2003; revised June 8, 2004. The associate ed-itor coordinating the review of this manuscript and approving it for publicationwas Dr. Tamas Sziranyi.
D. Akopian is with the Electrical Engineering Department, The Uni-versity of Texas at San Antonio, San Antonio, TX 78249 USA (e-mail:[email protected]).
J. Astola is with the Institute of Signal Processing, Tampere University ofTechnology, FIN-33101, Tampere, Finland (e-mail: [email protected]).
Digital Object Identifier 10.1109/TIP.2005.846023
Fig. 1. DA-based implementation of linear filters and BMBF.
memory-call operations and real multiplications and ad-ditions, where is the filter window length. This is due to thefact that the number of different threshold binary slices is atmost.
All of the above-mentioned extensions result in a complexityincrease, while we suggest an approach which aims at a betterutilization of the available resources. The proposed filter hasthe complexity of DA-based linear filter, i.e., requiresmemory-call operations and additions, where isthe number of bits in a binary representation of input data. Italso preserves the efficient on-the-fly computational structure.
We will also consider several extensions of the proposed fil-ters. In particular, the optimal selection of MFs for each binaryslice in the binary-radix representation will also be addressed inthe manner analogous to the microstatistic filters.
Many other nonlinear filters have been introduced to improvefiltering performance in non-Gaussian noise, to better preservedetails, and to meet other requirements. Some of them containlinear filters as components (see, e.g., [9]–[12]). Our goal inthis paper is to generalize linear filters without the complexityincrease and to suggest an optimization approach for this non-linear extension. Then, this new filter type can be used as a com-ponent of advanced nonlinear filters. As a case study, we will re-place the linear component of the well-known L-filters [11] byour extension, thus generalizing well known classes of L- andorder-statistic filters.
This paper is organized as follows. Section II reviews theDA-based linear filter implementations. Section III describesthe new approach and several modifications. In Section IV, wepresent simulation results.
II. DA-BASED IMPLEMENTATION OF LINEAR FILTERS
Suppose that is a discrete time multi-level process. Without loss of generality,
, , and
1057-7149/$20.00 © 2005 IEEE

AKOPIAN AND ASTOLA: OPTIMAL NONLINEAR EXTENSION OF LINEAR FILTERS 617
is an integer defining the number of bits for representing .Let us consider the set of data in the window of widthat the time
where .An arbitrary sliding window filter can be defined as a func-
tion , which transforms each window set to a number, which is called the filter output. To sim-
plify notation the current (at time ), the window of input datawill be presented as . Let
be the set of coefficients. The linear filteris defined by
(1)
Data in the window will also be denoted asif the time variable will be
irrelevant for a context. Input data can be represented in binarytwo’s complement form of
(2)
Then, one can derive from (1) and (2) the following:
(3)
or
(4)
where is a MF of the form
(5)
Because coefficients are constants, one can use a look-uptable for storing the values of during computations. The sizeof the table is cells.
Remark: One can also use other system configurations.Let us subdivide input set to a nonoverlapping group ofother vectors , and, in the same way, to
. Then
(6)
where . Also, digit-serial configurations can beobtained [1]. For processing digits in parallel, the RAM sizeincreases to cells, while the speed increases times.
III. NONLINEAR EXTENSION
Examining (4), one can see that it is based on a MF of type (5).Now, we can relax this restriction and formulate an optimizationproblem to find the best MF for the known statistics of inputsignals (test signals). The optimal MF may not be in the form of(5), which corresponds to linear filters. The filters of the form(4) based on an arbitrary MF will be called nonlinear binary-multiresolution Boolean filters (BMBF), thus indicating themultiresolution feature of these filters dealing with bit slices ofdifferent resolution in sequential steps. Let us define vectorsand as and .
Proposition 1: For a given input signal in window, the output of BMBF defined by a MF
can be expressed as
(7)
where is defined as withbeing the radix-2 representation of an integer
, with
(8)
ifotherwise.
(9)
Proof:
Now, compare this with (4).Suppose that and are desired and observed signals.
The observations at time within the filter window is denoted bythe vector . We wish to find a MF
which minimizes mean-square error (MSE),or according to Proposition 1
(10)
Based on Proposition 1, we can extend optimization proceduresfor Wiener filter design and ETBF [6] for BMBF filters
(11)
618 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 5, MAY 2005
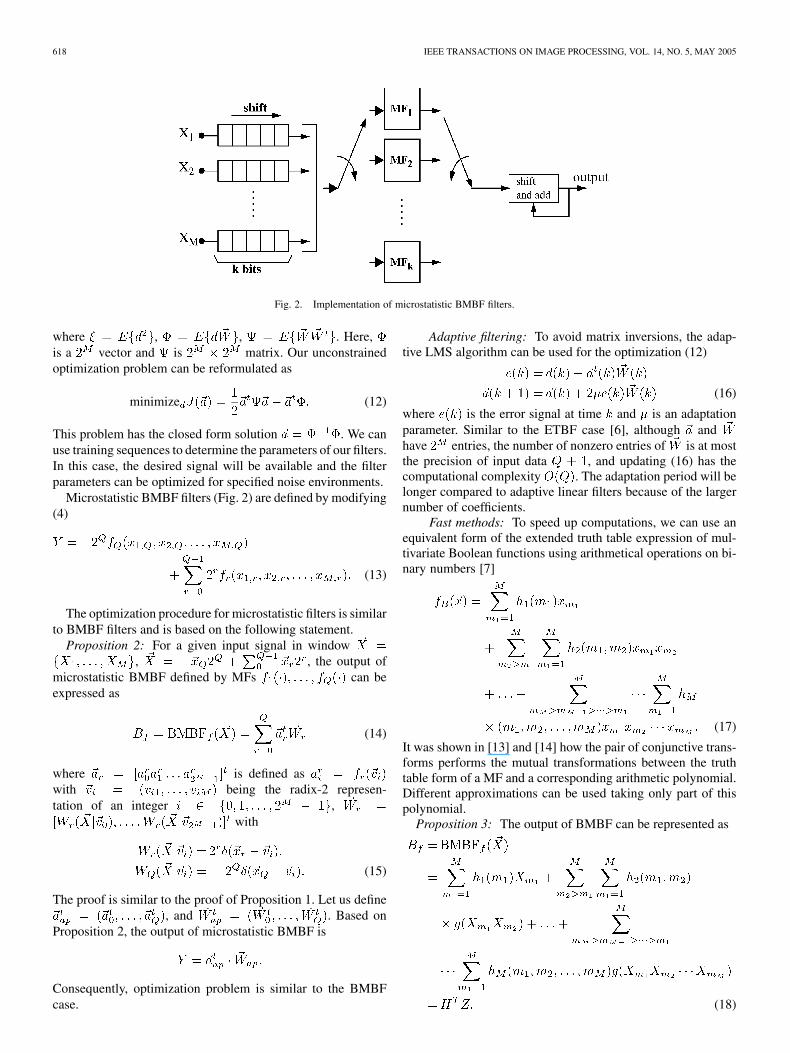
Fig. 2. Implementation of microstatistic BMBF filters.
where , , . Here,is a vector and is matrix. Our unconstrainedoptimization problem can be reformulated as
minimize (12)
This problem has the closed form solution . We canuse training sequences to determine the parameters of our filters.In this case, the desired signal will be available and the filterparameters can be optimized for specified noise environments.
Microstatistic BMBF filters (Fig. 2) are defined by modifying(4)
(13)
The optimization procedure for microstatistic filters is similarto BMBF filters and is based on the following statement.
Proposition 2: For a given input signal in window, , the output of
microstatistic BMBF defined by MFs can beexpressed as
(14)
where is defined aswith being the radix-2 represen-tation of an integer ,
with
(15)
The proof is similar to the proof of Proposition 1. Let us define, and . Based on
Proposition 2, the output of microstatistic BMBF is
Consequently, optimization problem is similar to the BMBFcase.
Adaptive filtering: To avoid matrix inversions, the adap-tive LMS algorithm can be used for the optimization (12)
(16)
where is the error signal at time and is an adaptationparameter. Similar to the ETBF case [6], although andhave entries, the number of nonzero entries of is at mostthe precision of input data , and updating (16) has thecomputational complexity . The adaptation period will belonger compared to adaptive linear filters because of the largernumber of coefficients.
Fast methods: To speed up computations, we can use anequivalent form of the extended truth table expression of mul-tivariate Boolean functions using arithmetical operations on bi-nary numbers [7]
(17)
It was shown in [13] and [14] how the pair of conjunctive trans-forms performs the mutual transformations between the truthtable form of a MF and a corresponding arithmetic polynomial.Different approximations can be used taking only part of thispolynomial.
Proposition 3: The output of BMBF can be represented as
(18)
AKOPIAN AND ASTOLA: OPTIMAL NONLINEAR EXTENSION OF LINEAR FILTERS 619
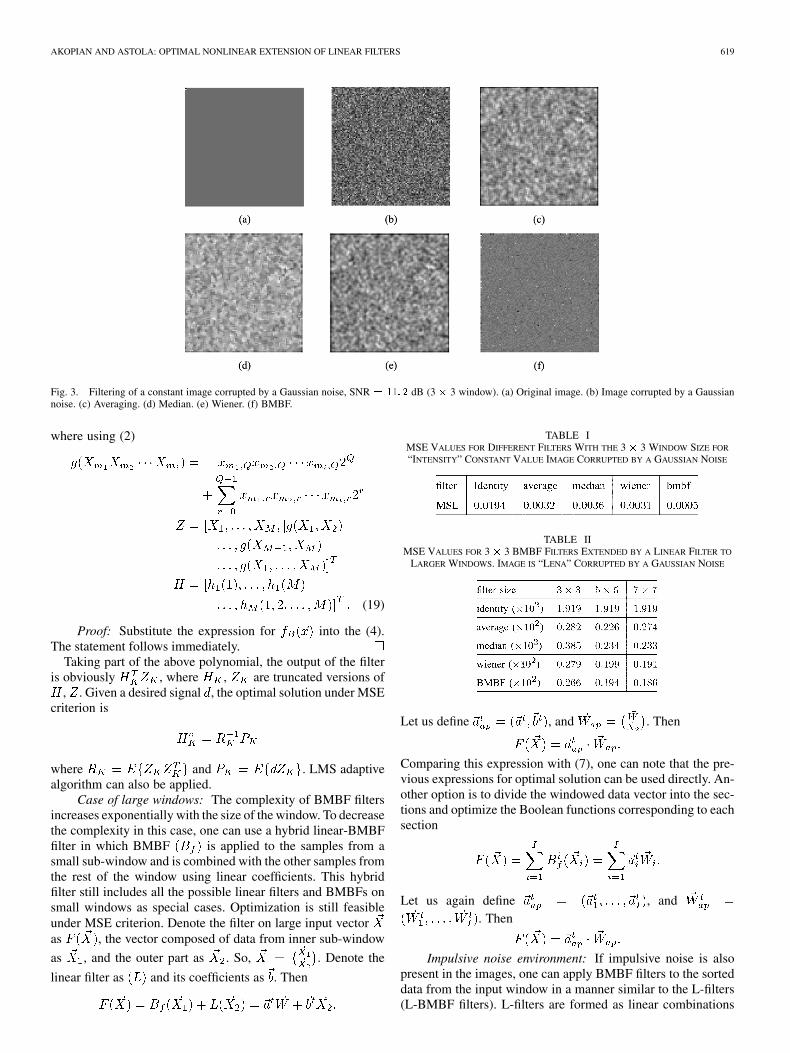
Fig. 3. Filtering of a constant image corrupted by a Gaussian noise, SNR = 11; 2 dB (3 � 3 window). (a) Original image. (b) Image corrupted by a Gaussiannoise. (c) Averaging. (d) Median. (e) Wiener. (f) BMBF.
where using (2)
(19)
Proof: Substitute the expression for into the (4).The statement follows immediately.
Taking part of the above polynomial, the output of the filteris obviously , where , are truncated versions of
, . Given a desired signal , the optimal solution under MSEcriterion is
where and . LMS adaptivealgorithm can also be applied.
Case of large windows: The complexity of BMBF filtersincreases exponentially with the size of the window. To decreasethe complexity in this case, one can use a hybrid linear-BMBFfilter in which BMBF is applied to the samples from asmall sub-window and is combined with the other samples fromthe rest of the window using linear coefficients. This hybridfilter still includes all the possible linear filters and BMBFs onsmall windows as special cases. Optimization is still feasibleunder MSE criterion. Denote the filter on large input vectoras , the vector composed of data from inner sub-window
as , and the outer part as . So, . Denote the
linear filter as and its coefficients as . Then
TABLE IMSE VALUES FOR DIFFERENT FILTERS WITH THE 3 � 3 WINDOW SIZE FOR
“INTENSITY” CONSTANT VALUE IMAGE CORRUPTED BY A GAUSSIAN NOISE
TABLE IIMSE VALUES FOR 3 � 3 BMBF FILTERS EXTENDED BY A LINEAR FILTER TO
LARGER WINDOWS. IMAGE IS “LENA” CORRUPTED BY A GAUSSIAN NOISE
Let us define , and . Then
Comparing this expression with (7), one can note that the pre-vious expressions for optimal solution can be used directly. An-other option is to divide the windowed data vector into the sec-tions and optimize the Boolean functions corresponding to eachsection
Let us again define , and. Then
Impulsive noise environment: If impulsive noise is alsopresent in the images, one can apply BMBF filters to the sorteddata from the input window in a manner similar to the L-filters(L-BMBF filters). L-filters are formed as linear combinations
620 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 5, MAY 2005
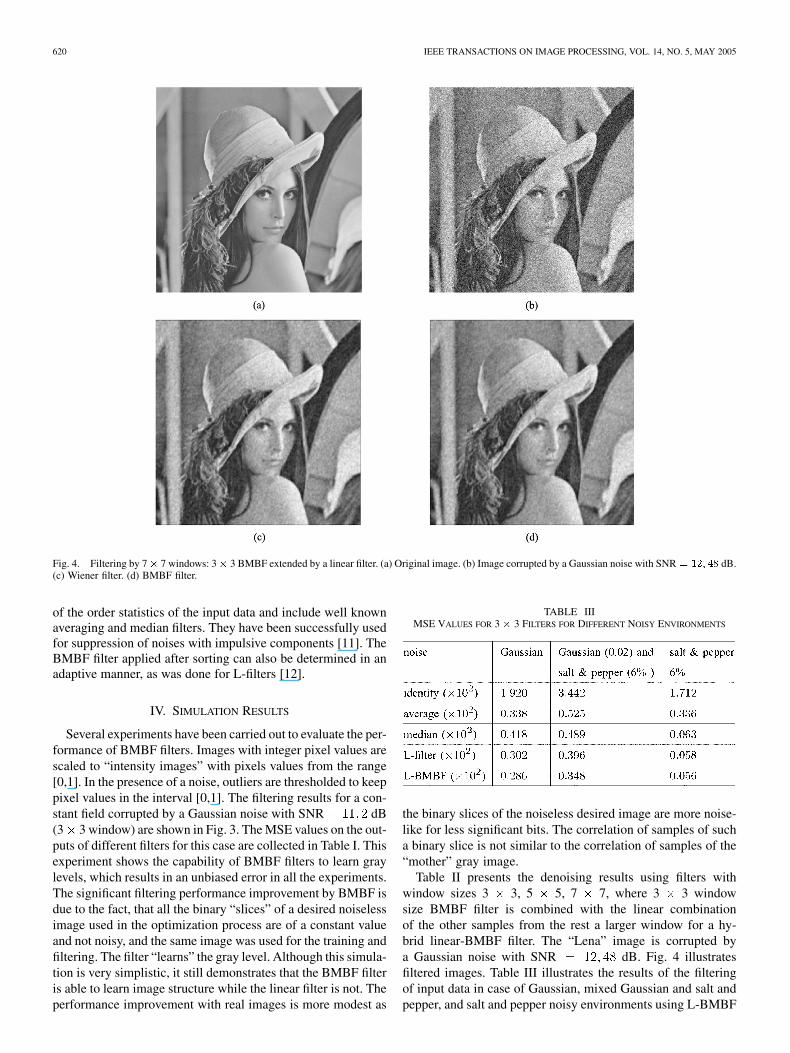
Fig. 4. Filtering by 7� 7 windows: 3� 3 BMBF extended by a linear filter. (a) Original image. (b) Image corrupted by a Gaussian noise with SNR = 12; 48 dB.(c) Wiener filter. (d) BMBF filter.
of the order statistics of the input data and include well knownaveraging and median filters. They have been successfully usedfor suppression of noises with impulsive components [11]. TheBMBF filter applied after sorting can also be determined in anadaptive manner, as was done for L-filters [12].
IV. SIMULATION RESULTS
Several experiments have been carried out to evaluate the per-formance of BMBF filters. Images with integer pixel values arescaled to “intensity images” with pixels values from the range[0,1]. In the presence of a noise, outliers are thresholded to keeppixel values in the interval [0,1]. The filtering results for a con-stant field corrupted by a Gaussian noise with SNR dB(3 3 window) are shown in Fig. 3. The MSE values on the out-puts of different filters for this case are collected in Table I. Thisexperiment shows the capability of BMBF filters to learn graylevels, which results in an unbiased error in all the experiments.The significant filtering performance improvement by BMBF isdue to the fact, that all the binary “slices” of a desired noiselessimage used in the optimization process are of a constant valueand not noisy, and the same image was used for the training andfiltering. The filter “learns” the gray level. Although this simula-tion is very simplistic, it still demonstrates that the BMBF filteris able to learn image structure while the linear filter is not. Theperformance improvement with real images is more modest as
TABLE IIIMSE VALUES FOR 3 � 3 FILTERS FOR DIFFERENT NOISY ENVIRONMENTS
the binary slices of the noiseless desired image are more noise-like for less significant bits. The correlation of samples of sucha binary slice is not similar to the correlation of samples of the“mother” gray image.
Table II presents the denoising results using filters withwindow sizes 3 3, 5 5, 7 7, where 3 3 windowsize BMBF filter is combined with the linear combinationof the other samples from the rest a larger window for a hy-brid linear-BMBF filter. The “Lena” image is corrupted bya Gaussian noise with SNR dB. Fig. 4 illustratesfiltered images. Table III illustrates the results of the filteringof input data in case of Gaussian, mixed Gaussian and salt andpepper, and salt and pepper noisy environments using L-BMBF
AKOPIAN AND ASTOLA: OPTIMAL NONLINEAR EXTENSION OF LINEAR FILTERS 621
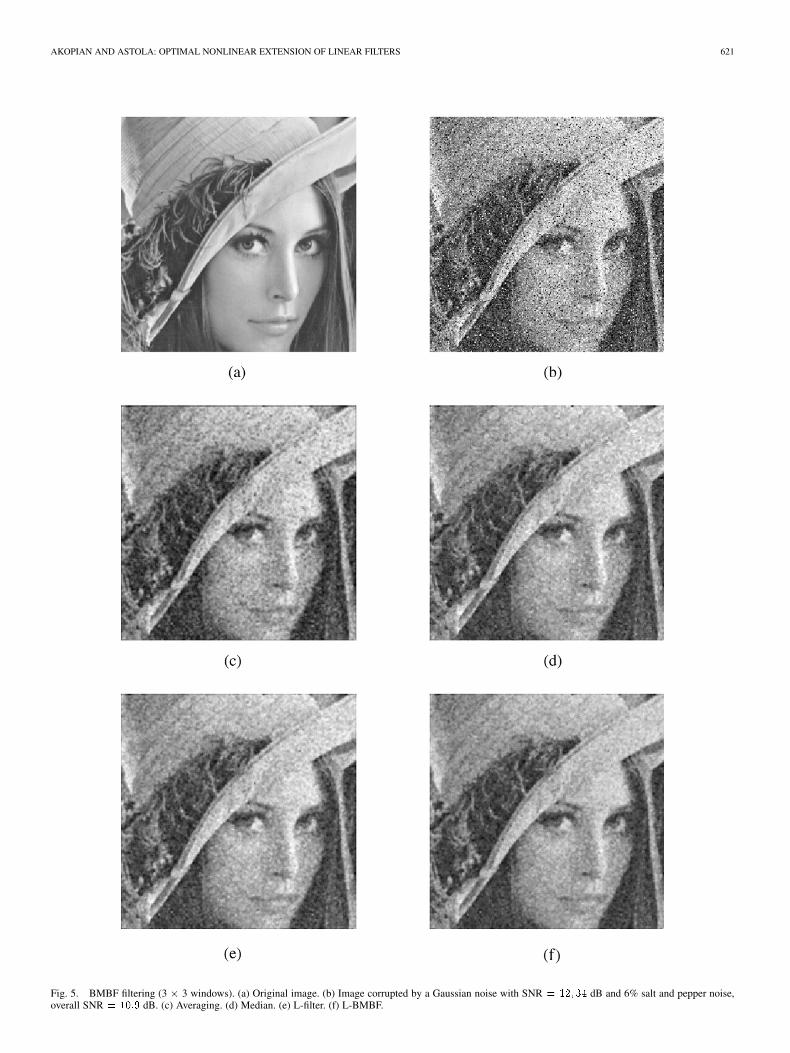
Fig. 5. BMBF filtering (3 � 3 windows). (a) Original image. (b) Image corrupted by a Gaussian noise with SNR = 12; 34 dB and 6% salt and pepper noise,overall SNR = 10:9 dB. (c) Averaging. (d) Median. (e) L-filter. (f) L-BMBF.
622 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 5, MAY 2005
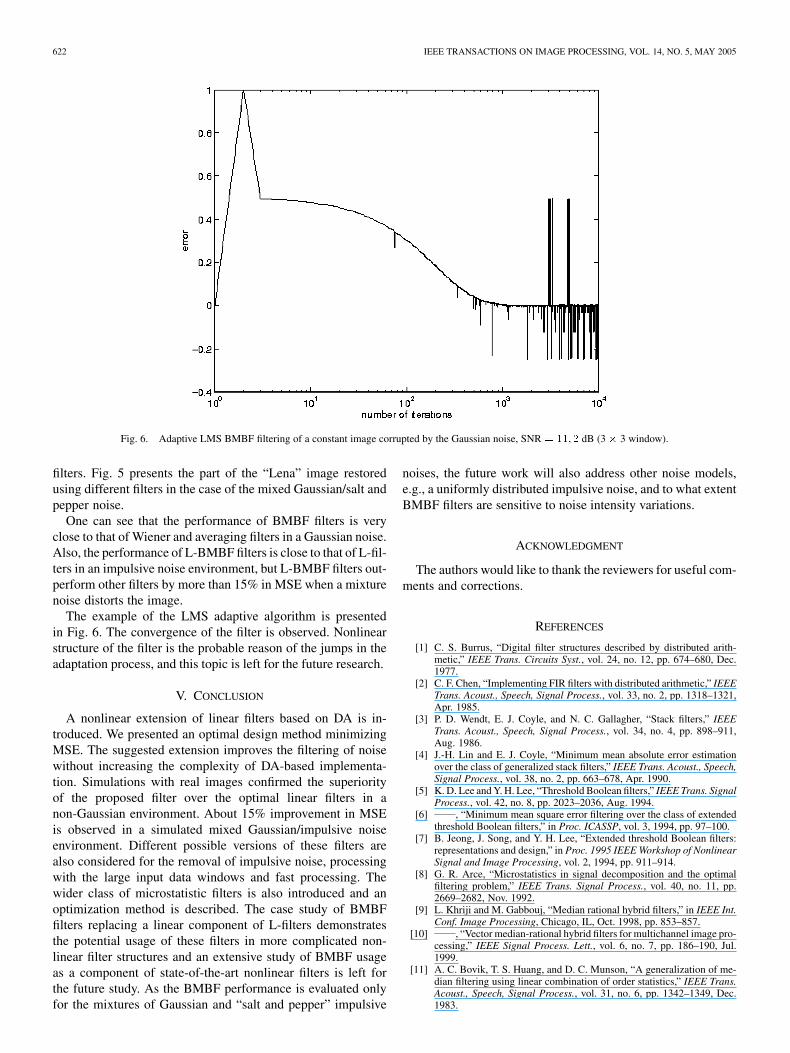
Fig. 6. Adaptive LMS BMBF filtering of a constant image corrupted by the Gaussian noise, SNR = 11; 2 dB (3 � 3 window).
filters. Fig. 5 presents the part of the “Lena” image restoredusing different filters in the case of the mixed Gaussian/salt andpepper noise.
One can see that the performance of BMBF filters is veryclose to that of Wiener and averaging filters in a Gaussian noise.Also, the performance of L-BMBF filters is close to that of L-fil-ters in an impulsive noise environment, but L-BMBF filters out-perform other filters by more than 15% in MSE when a mixturenoise distorts the image.
The example of the LMS adaptive algorithm is presentedin Fig. 6. The convergence of the filter is observed. Nonlinearstructure of the filter is the probable reason of the jumps in theadaptation process, and this topic is left for the future research.
V. CONCLUSION
A nonlinear extension of linear filters based on DA is in-troduced. We presented an optimal design method minimizingMSE. The suggested extension improves the filtering of noisewithout increasing the complexity of DA-based implementa-tion. Simulations with real images confirmed the superiorityof the proposed filter over the optimal linear filters in anon-Gaussian environment. About 15% improvement in MSEis observed in a simulated mixed Gaussian/impulsive noiseenvironment. Different possible versions of these filters arealso considered for the removal of impulsive noise, processingwith the large input data windows and fast processing. Thewider class of microstatistic filters is also introduced and anoptimization method is described. The case study of BMBFfilters replacing a linear component of L-filters demonstratesthe potential usage of these filters in more complicated non-linear filter structures and an extensive study of BMBF usageas a component of state-of-the-art nonlinear filters is left forthe future study. As the BMBF performance is evaluated onlyfor the mixtures of Gaussian and “salt and pepper” impulsive
noises, the future work will also address other noise models,e.g., a uniformly distributed impulsive noise, and to what extentBMBF filters are sensitive to noise intensity variations.
ACKNOWLEDGMENT
The authors would like to thank the reviewers for useful com-ments and corrections.
REFERENCES
[1] C. S. Burrus, “Digital filter structures described by distributed arith-metic,” IEEE Trans. Circuits Syst., vol. 24, no. 12, pp. 674–680, Dec.1977.
[2] C. F. Chen, “Implementing FIR filters with distributed arithmetic,” IEEETrans. Acoust., Speech, Signal Process., vol. 33, no. 2, pp. 1318–1321,Apr. 1985.
[3] P. D. Wendt, E. J. Coyle, and N. C. Gallagher, “Stack filters,” IEEETrans. Acoust., Speech, Signal Process., vol. 34, no. 4, pp. 898–911,Aug. 1986.
[4] J.-H. Lin and E. J. Coyle, “Minimum mean absolute error estimationover the class of generalized stack filters,” IEEE Trans. Acoust., Speech,Signal Process., vol. 38, no. 2, pp. 663–678, Apr. 1990.
[5] K. D. Lee and Y. H. Lee, “Threshold Boolean filters,” IEEE Trans. SignalProcess., vol. 42, no. 8, pp. 2023–2036, Aug. 1994.
[6] , “Minimum mean square error filtering over the class of extendedthreshold Boolean filters,” in Proc. ICASSP, vol. 3, 1994, pp. 97–100.
[7] B. Jeong, J. Song, and Y. H. Lee, “Extended threshold Boolean filters:representations and design,” in Proc. 1995 IEEE Workshop of NonlinearSignal and Image Processing, vol. 2, 1994, pp. 911–914.
[8] G. R. Arce, “Microstatistics in signal decomposition and the optimalfiltering problem,” IEEE Trans. Signal Process., vol. 40, no. 11, pp.2669–2682, Nov. 1992.
[9] L. Khriji and M. Gabbouj, “Median rational hybrid filters,” in IEEE Int.Conf. Image Processing, Chicago, IL, Oct. 1998, pp. 853–857.
[10] , “Vector median-rational hybrid filters for multichannel image pro-cessing,” IEEE Signal Process. Lett., vol. 6, no. 7, pp. 186–190, Jul.1999.
[11] A. C. Bovik, T. S. Huang, and D. C. Munson, “A generalization of me-dian filtering using linear combination of order statistics,” IEEE Trans.Acoust., Speech, Signal Process., vol. 31, no. 6, pp. 1342–1349, Dec.1983.

AKOPIAN AND ASTOLA: OPTIMAL NONLINEAR EXTENSION OF LINEAR FILTERS 623
[12] I. Pitas and A. N. Venetsanopoulos, “Adaptive filters based on orderstatistics,” IEEE Trans. Signal Process., vol. 39, no. 2, pp. 518–522, Feb.1991.
[13] N. N. Aizenberg, “Spectrum of the convolution of the discrete signalsin an arbitrary basis,” Rep. Acad. Sci. USSR (Doklady Akademii NaukSSSR), vol. 241, no. 3, pp. 551–554.
[14] K. Egiazarian and J. Astola, “Transform domain analysis and implemen-tation of extended threshold Boolean filters,” in Proc. IEEE NORSIGConf., Helsinki, Finland, Sep. 1996, pp. 287–290.
David Akopian (SM’03) received the M.Sc. degreein electrical engineering from the Moscow Instituteof Physics and Technology, Moscow, Russia, andthe Ph.D. degree in electrical engineering from theTampere University of Technology (TUT), Tampere,Finland, in 1987 and 1997, respectively.
From 1989 to 1993, he was a Research Scientistwith the Institute of Informatics and Automatization,Yerevan, Armenia. From 1994 to 1999, he was amember of the teaching and research staff at TUT.He was with the Research and Technology Access
Department of Nokia Mobile Phones (NMP), Tampere, Finland, from 1999to 2003. Currently, he is an Assistant Professor at The University of Texasat San Antonio. His research interests include dedicated hardware architec-tures, receiver architectures and positioning algorithms, and signal and imageprocessing methods for communications.
Jaakko Astola (F’00) received the B.Sc., M.Sc.,Licentiate, and Ph.D. degrees in mathematics (spe-cializing in error-correcting codes) from TurkuUniversity, Turku, Finland, in 1972, 1973, 1975, and1978, respectively.
From 1976 to 1977, he was with the ResearchInstitute for Mathematical Sciences of Kyoto Uni-versity, Kyoto, Japan. Between 1979 and 1987,he was with the Department of Information Tech-nology, Lappeenranta University of Technology,Lappeenranta, Finland, holding various teaching
positions in mathematics, applied mathematics, and computer science. In1984, he was a Visiting Scientist at Eindhoven University of Technology,Eindhoven, The Netherlands. From 1987 to 1992, he was an AssociateProfessor in applied mathematics at Tampere University, Tampere, Finland.Since 1993, he has been a Professor of signal processing and Director of theTampere International Center for Signal Processing, leading a group of about60 scientists. His research interests include signal processing, coding theory,spectral techniques and statistics.
Dr. Astola was nominated as Academy Professor by the Academy of Finland(2001 to 2006).
Related Documents











