Fachbereich Mathematik Universit¨ at Siegen Theorie und Praxis f¨ ur Karrieren von morgen Theorie und L ¨ osung partieller Differenzialgleichungen Wintersemester 2004/2005 0 L 0 T . . x . . t u tt = c 2 u xx u( x, 0 ) = u 0 (x) u t ( x, 0 ) = u 1 (x) u( 0,t ) =0 u( L, t ) =0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . PD Dr. Robert Plato Fachbereich Mathematik E Mail: [email protected] Universit¨ at Siegen Internet: http://www.math.uni-siegen.de/˜plato

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Fachbereich Mathematik Universitat Siegen
Theorieund Praxisfur Karrierenvon morgen
Theorie und Losung partieller Differenzialgleichungen
Wintersemester 2004/2005
0 L0
T
..............................................................................................................................................
... x
....
.....
....
.....
.....
....
.....
....
.....
....
.....
....................
................
t
utt = c2uxx
u(x, 0) = u0(x)ut(x, 0) = u1(x)
u(0, t) = 0 u(L, t) = 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
PD Dr. Robert Plato
Fachbereich Mathematik E Mail: [email protected]
Universitat Siegen Internet: http://www.math.uni-siegen.de/˜plato


INHALTSVERZEICHNIS i
Inhaltsverzeichnis
Inhaltsverzeichnis i
1 Transport und Diffusion 11.1 Mathematische Modellierung des Transports von Flussigkeiten . . . . . . . . . . . . . . . . 1
1.1.1 Allgemeine Losung der raumlich halbunendlichen Transportgleichung . . . . . . . 2
1.2 Diffusionsgleichung – Mathematische Modellierung . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Die Fouriersche Methode fur die Diffusionsgleichung . . . . . . . . . . . . . . . . . . . . . 5
1.3.1 Trennung der Veranderlichen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2 Anpassung an die Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.3 Superposition – Anpassung an die Anfangsbedingung . . . . . . . . . . . . . . . . 8
1.4 Einfuhrung in die Theorie der Fourierreihen . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1 Orthogonalitat trigonometrischer Monome . . . . . . . . . . . . . . . . . . . . . . 9
1.4.2 Fourierreihen reellwertiger und komplexwertiger Funktionen . . . . . . . . . . . . . 10
1.4.3 Konvergenz von Fourierreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.4 Fourierentwicklung gerader und ungerader Funktionen . . . . . . . . . . . . . . . . 14
1.4.5 Allgemeine Intervalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Mathematische Analysis zum Separationsansatz . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6 Losungsdarstellung uber die Greensche Funktion . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Separationsansatz fur die inhomogene Warmeleitungsgleichung . . . . . . . . . . . . . . . 16
1.7.1 Nullrand- und Anfangsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7.2 Allgemeine Rand- und Anfangsbedingungen . . . . . . . . . . . . . . . . . . . . . 17
1.8 Maximum– Minimum– Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.9 Anfangswertproblem fur die eindimensionale Diffusionsgleichung . . . . . . . . . . . . . . 20
1.10 Erhaltungsprinzipien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.10.1 Nichnegativitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.10.2 Massenerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.11 Black– Scholes– Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.11.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.11.2 Zeitliche Transformation der Differenzialgleichung . . . . . . . . . . . . . . . . . . 24
1.11.3 Raumliche Transformation der Differenzialgleichung . . . . . . . . . . . . . . . . . 24
1.11.4 Elimination des ableitungsfreien Anteils . . . . . . . . . . . . . . . . . . . . . . . . 25
1.11.5 Konstruktion der Losung fur preisunabhangige Volatilitaten . . . . . . . . . . . . . 25
1.11.6 Implizierte Volatilitaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.11.7 Weitere Themen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
– Ubungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2 Wellenausbreitung – Mathematische Modellierung und numerische Losung 302.1 Mathematische Modellierung der Ausbreitung von Wellen . . . . . . . . . . . . . . . . . . 30
2.1.1 Die raumlich eindimensionale Ausbreitung von Wellen . . . . . . . . . . . . . . . . 30
2.1.2 Die raumlich zweidimensionale Ausbreitung von Wellen . . . . . . . . . . . . . . . 32
2.1.3 Die raumlich dreidimensionale Ausbreitung von Wellen . . . . . . . . . . . . . . . 32

ii INHALTSVERZEICHNIS
2.1.4 Nichtlineare Schwingungsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2 Die raumlich eindimensionale, unbeschrankte Schwingungsgleichung . . . . . . . . . . . . 33
2.3 Die Fouriersche Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.1 Trennung der Veranderlichen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.2 Anpassung an die Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3.3 Superposition – Anpassung an die Anfangsbedingung . . . . . . . . . . . . . . . . 37
2.4 Mathematische Analysis zum Separationsansatz . . . . . . . . . . . . . . . . . . . . . . . . 39
2.5 Energie, Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6 Ebene Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.7 Spharische Wellenfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.7.1 Der raumlich dreidimensionale Fall d = 3 . . . . . . . . . . . . . . . . . . . . . . . 42
2.7.2 Der raumlich zweidimensionale Fall d = 2 . . . . . . . . . . . . . . . . . . . . . . 43
2.8 Trennung der Veranderlichen im mehrdimensionalen Fall . . . . . . . . . . . . . . . . . . . 44
2.9 Nachtrag zur raumlich unbeschrankten eindimensionalen Schwingungsgleichung . . . . . . 45
3 Klassifikation partieller Differenzialgleichungen 473.1 Quasilineare partielle Differenzialgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Charakteristiken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Typeneinteilung quasilinearer Differenzialgleichungen . . . . . . . . . . . . . . . . . . . . 50
4 Die Poissongleichung 524.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.2 Klassifkation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3 Der rotationssymmetrische Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.1 Der Torus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4 Der zweidimensionale Fall, Polarkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4.1 Der Kreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4.2 Der Kreisring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5 Die Poisson– Gleichung in der Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.5.1 Gaußscher Integralsatz und Greensche Formeln in der Ebene . . . . . . . . . . . . . 57
4.5.2 Dirichlet-Randdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.5.3 Neumann-Randdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.6 Mittelwerteigenschaft harmonischer Funktionen . . . . . . . . . . . . . . . . . . . . . . . . 61
4.7 Maximumprinzip und Folgerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.8 Greensche Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.8.1 Darstellungssatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.8.2 Losung des Dirichletproblems fur die Laplacegleichung mittels Greenscher Funk-
tionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.8.3 Greensche Funktion fur die dreidimensionale Kugel . . . . . . . . . . . . . . . . . 68
4.8.4 Losung des Dirichletproblems fur die Potentialgleichung mittels Greenscher Funk-
tionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.8.5 Eigenschaften Greenscher Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.9 Die Laplace– Gleichung fur den Kreissektor . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.9.1 Einspringende Ecken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.10 Der Separationsansatz fur die Laplace– Gleichung auf beschrankten Rechteckgebieten . . . 71

INHALTSVERZEICHNIS iii
4.11 Der Separationsansatz fur die Laplace– Gleichung auf unbeschrankten Gebieten . . . . . . . 73
5 Schwache Losungen 755.1 Poisson– Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.1.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.1.2 Erweiterte Testraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.1.3 Allgemeine Theorie fur Variationsgleichungen . . . . . . . . . . . . . . . . . . . . 78
5.1.4 Schwache Ableitungen, Sobolevraum H 1(D ) . . . . . . . . . . . . . . . . . . . . . 80
5.1.5 Sobolevraume hoherer Ordnung, Gaußscher Integralsatz . . . . . . . . . . . . . . . 83
5.1.6 Schwache Formulierung der Poisson– Gleichung auf H 1(D ) . . . . . . . . . . . . . 83
5.1.7 Andere Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.2 Andere elliptische Differenzialgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.2.1 Stetigkeit der Bilinearform a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.2.2 H10 (D )– Elliptizitat der Bilinearform a . . . . . . . . . . . . . . . . . . . . . . . . 88
5.2.3 Inhomogene Dirichlet-Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . 89
5.3 Warmeleitungsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.3.1 Schwache Formulierung bzgl. x . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6 Stromungsverhalten – Mathematische Modellierung 926.1 Einfuhrende Bemerkungen zur mathematischen Modellierung . . . . . . . . . . . . . . . . 92
6.2 Die Navier-Stokes-Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.2.1 Die allgemeine Form der Navier-Stokes-Gleichungen . . . . . . . . . . . . . . . . . 93
6.2.2 Navier-Stokes-Gleichungen in koordinatenfreier Schreibweise . . . . . . . . . . . . 94
6.2.3 Anfangs- und Randstromung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.2.4 Spezialfalle der Navier-Stokes-Gleichungen . . . . . . . . . . . . . . . . . . . . . . 96
6.3 Das Prinzip der Massenerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.4 Das Prinzip der Impulserhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.5 Inkompressible ebene Stromungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.5.1 Die Navier-Stokes-Gleichungen fur ebene Stromungen . . . . . . . . . . . . . . . . 99
6.5.2 Auskopplung des Drucks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.6 Reynoldszahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
6.7 Einige Erganzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
6.7.1 Einige Werte fur die kinematische Zahigkeit µ . . . . . . . . . . . . . . . . . . . . 101
6.7.2 Nicht-Newtonsche Fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
References 103

1
1 Transport und Diffusion
1.1 Mathematische Modellierung des Transports von Fl ussigkeiten
Im weiteren Verlauf wird ein mit einer Flussigkeit gefullter Schlauch betrachtet, wobei die folgenden wei-
teren Bedingungen erfullt seien:
(i) Der Schlauch wird zur Vereinfachung als halb unendlich lang angenommen und verlaufe
von x = 0 bis x = ∞.
(ii) Es wird außerdem noch angenommen, dass es sich um eine inkompressible Flussigkeit
handelt, sie kann also nicht komprimiert werden.
(iii) Am linken Ende des Schlauches, also bei x = 0, wird ab dem Zeitpunkt t = 0 mit
konstanter Geschwindigkeit c > 0 weitere Flussigkeit in den Schlauch gepumpt.
(iv) In der Flussigkeit selbst befinde sich eine Substanz, etwa Salz in geloster Form oder Farb-
partikel. Diese Substanz schwebt in der Flussigkeit und bewegt sich mit der gleichen Ge-
schwindigkeit wie diese fort.
(1.1)
Teil (iii) in (1.1) zusammen mit der angenommenen Inkompressibilitat hat zur Folge, dass sich die Flussig-
keit und mit ihr die Substanz in gesamten Schlauch mit einer konstanten Geschwindigkeit c > 0 fortbe-
wegen. Dies bedeutet, dass beide sich vom einem beliebigen Zeitpunkt t1 ∈ [ 0, T ) bis zu einem anderen
beliebigen Zeitpunkt t2 mit t1 < t2 ≤ T uberall um die Strecke ..................................................................................... x = c(t2 − t1 ) nach rechts bewegen.
Die Konzentration der Substanz wird im Folgenden mit u(x, t) bezeichnet und hangt sowohl von der Po-
sition x im Schlauch als auch vom betrachteten Zeitpunkt t ≥ 0 ab. Angegeben wird die Konzentration
beispielsweise in Milligramm pro Liter.
0x........................
................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..................................................................
......................................................
................
.................................................................
.......................................................
................
..................................................................
..
..................................................................
......................................................
................
.................................................................
.......................................................
................
..................................................................
..
•
•
•
•••
•
••••
•
•
•••
•
••••
•
•
•••
•
•••
Abbildung 1.1 Betrachtung des Schlauchs zur Zeit t > 0
Zum Zeitpunkt t = 0 sei die Konzentration als bekannt vorausgesetzt, die Werte
u(x, 0) = u0(x) fur x ≥ 0 (1.2)

2 Kapitel 1 Transport und Diffusion
sind also gegeben. Ebenfalls als bekannt vorausgesetzt sei fur alle Zeiten die Konzentration am linken Rand
x = 0, die Werte
u(0, t) = u1(t) fur t ≥ 0 (1.3)
sind also ebenfalls gegeben.
Die Konzentration u(x, t) fur x > 0, t > 0 ist unbekannt und soll bestimmt werden. (1.4)
Zur Behandlung der Aufgabenstellung wird als Erstes eine mathematische Modellierung vorgenommen, an
deren Ende sich eine Bestimmungsgleichung fur die gesuchte Konzentration ergibt. Zunachst stellt man
anhand von Teil (iii) in (1.1) fest, dass diejenigen Partikel, die sich zur Zeit t ≥ 0 am Ort x befinden,
zur Zeit t + ..................................................................................... t im Ort x + c................
..................................................................... t angelangt sein mussen. Damit muss fur die zugehorige Konzentration
naheliegenderweise Folgendes gelten:
u(x+ c..................................................................................... t, t+ ................
..................................................................... t) = u(x, t) fur x ≥ 0. (1.5)
Werden nun die in der Identitat (1.5) auftretenden Funktionen nach ..................................................................................... t differenziert, so erhalt man
c∂u
∂x(x+ c................
..................................................................... t, t+ ................
..................................................................... t) +
∂u
∂t(x+ c................
..................................................................... t, t+ ................
..................................................................... t) = 0 fur x, t, ................
..................................................................... t ≥ 0. (1.6)
Der Grenzubergang ..................................................................................... t→ 0 in (1.6) liefert schließlich die Transportgleichung
(c∂u
∂x+
∂u
∂t
)(x, t) = 0 fur x ≥ 0, t ≥ 0. (1.7)
Bemerkung 1.1 Es handelt sich bei der Transportgleichung (1.7) um ein Anfangs-Randwertproblem fur
eine lineare partielle Differenzialgleichung erster Ordnung mit konstanten Koeffizienten fur die ge-
suchte Funktion u. Als partielle Differenzialgleichung bezeichnet man sie wegen der auftretenden unter-
schiedlichen partiellen Ableitungen. Dabei handelt es sich lediglich um partielle Ableitungen erster Ord-
nung, so dass man die partielle Differenzialgleichung als von erster Ordnung bezeichnet. Weiterhin stellt fur
zwei Losungen u und v sowie reellen Koeffizienten a1 und a2 auch die Funktion a1u+a2v eine Losung der
Transportgleichung dar, weswegen diese als linear bezeichnet wird. Die auftretenden Koeffizienten schließ-
lich hangen nicht von der auftretenden Variablen ab, sie sind also konstant. M
1.1.1 Allgemeine Losung der raumlich halbunendlichen Transportgleichung
Es werden nun die Losungen der raumlich halbunendlichen Transportgleichung (1.7) bestimmt. Hierzu fuhrt
man die Variablentransformation
ξ = x− ct ∈ R, η = x+ ct ∈ R
durch und betrachtet die zugehorige Funktion
v(ξ, η ) := u(x, t) = u( ξ + η
2,
η − ξ
2c
)fur ξ, η ∈ R.
Partielle Differentiation nach η liefert∂v
∂η= 1
2
(∂u
∂x+
1c
∂u
∂t
)!= 0 fur ξ, η ∈ R.

Abschnitt 1.2 Diffusionsgleichung – Mathematische Modellierung 3
Es stellt also die Funktion u genau dann eine Losung der raumlich halbunendlichen Transportgleichung
(1.7) dar, wenn∂v
∂η= 0 auf R
2 gilt beziehungsweise
v(ξ, η ) = f (ξ ) fur ξ, η ∈ R
erfullt ist mit einer differenzierbaren Funktion f : R → R. Mit den urspunglichen Variablen x, t bedeutet
dies
u(x, t) = v(ξ, η ) = f (ξ ) = f (x− ct) fur x ∈ R, t > 0.
Die spezielle Wahl der Funktion f ergibt sich aus den Anfangsbedingungen (1.2) und den Randbedingungen
(1.5):
f (x) = u(x, 0)!= u0(x) fur x ≥ 0,
f ( − ct) = u(0, t)!= u1(t) fur t ≥ 0.
1.2 Diffusionsgleichung – Mathematische Modellierung
Es wird wieder ein mit einer Flussigkeit gefullter Schlauch betrachtet, wobei nun die folgenden weiteren
Bedingungen erfullt seien:
• Der Schlauch wird als endlich lang angenommen und verlaufe von x = 0 bis x = L, wobei L > 0 eine
reelle Zahl ist.• In der Flussigkeit selbst befinde sich eine Substanz. Die Konzentration dieser Substanz wird wie bis-
her mit u(x, t) bezeichnet und hangt wiederum sowohl von der Position x im Schlauch als auch vom
betrachteten Zeitpunkt t ≥ 0 ab.
Anders als bisher liege nun die Situation vor, dass die Substanz durch die im Schlauch befindliche Flussigkeit
wandern (diffundieren) kann.
Im weiteren Verlauf sind die Großen Fluss q(x, t) und die Masse der in der Flussigkeit vorhandenen Sub-
stanz von Bedeutung. Diese beiden Großen werden zunachst erlautert sowie deren funktionalen Zusam-
menhange beschrieben.
• Die Masse der Substanz in einem beliebigen Teilstuck [x, x + ..................................................................................... x ] ⊂ [0, L ] des Schlauches besitzt die
DarstellungZ x+................
..................................................................... x
xu(y, t) dy =: M (t). (1.8)
Hierbei hangt die Masse M naturlich auch noch von x und x+ ..................................................................................... x ab und wird beispielsweise in Milli-
gramm angegeben.• Bei dem Fluss q(x, t) handelt es sich um die Menge der Substanz, die zum Zeitpunkt t den Ort x von
links nach rechts pro Zeiteinheit passiert. Angegeben wird der Fluss beispielsweise in Milligramm pro
Sekunde. Somit stimmt der Fluss q(x, t) mit dem Wert uberein, den man erhalt, wenn man Menge der
Substanz, die in der Zeit von t bis t + ..................................................................................... t durch den Ort x bewegt, durch ................
..................................................................... t dividiert und hierfur an-
schließend den Grenzwert fur ..................................................................................... t→ 0 bildet. Fliesst die Substanz von rechts nach links, so fallt der Fluss
negativ aus.• Es soll Massenerhaltung gelten, die zeitliche Anderung der Masse darf also nur von der Differenz
zwischen Zu und Abfluss abhangen:
M ′(t) = q(x, t) − q(x+ ..................................................................................... x, t). (1.9)

4 Kapitel 1 Transport und Diffusion
Ersetzt man in (1.9) auf der linken Seite M (t) durch (1.8), so erhalt manZ x+............
................................................ x
x
∂u
∂t(y, t) dy = q(x, t) − q(x+ ................
..................................................................... x, t). (1.10)
Division in (1.10) durch ..................................................................................... x und ein anschließender Grenzubergang ................
..................................................................... x→ 0 liefert die Identitat
∂u
∂t(x, t) = −∂q
∂x(x, t) fur x ∈ [0, L], t > 0. (1.11)
Diese eine Erhaltungsgleichung legt die Funktionen u und q noch nicht in eindeutiger Weise fest, fur den
Fluss sind weitere Annahmen notig.
Allgemein wird hierzu noch ein funktioneller Zusammenhang zwischen den Funktionen∂u
∂xund q von der
Form
q = −ϕ( ∂u
∂x
)mit ϕ : R → R monoton wachsend, ϕ(0) = 0, (1.12)
angenommen, wobei die Funktion ϕ als bekannt vorausgesetzt wird. Diese Beziehung (1.12) wird als Dif-fusionsgesetz bezeichnet. Die spezielle Forderung an die Funktion ϕ ist plausibel und lasst sich fur eine
ruhende Flussigkeit schnell einsehen. Dort ist das Konzentrationsgefalle∂u
∂xalleine fur die Anderung der
Konzentration selbst verantwortlich. Unterstellt man noch, dass die Substanz sich gleichverteilen mochte,
so bewirkt jede Ungleichheit der Konzentration beziehungsweise jedes Konzentrationsgefalle einen Fluss
der Substanz in Richtung des Ortes mit kleinerer Konzentration.
Das einfachste Diffusionsgesetz besagt nun, dass der Fluss q linear vom Konzentrationsgefalle∂u
∂xabhangt,
q(x, t) = −c2 ∂u∂x
(x, t) fur x ∈ [0, L], t > 0. (1.13)
Hierbei ist c2 > 0 eine materialspezifische Konstante, die auch als Diffusionskonstante bezeichnet wird.
Typischerweise bestimmt man sie durch Messungen. Partielle Differentiation nach x in der Gleichung (1.13)
und ein anschließendes Einsetzen des Ergebnisses in (1.10) liefert schließlich die Diffusionsgleichung
∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ [0, L], t > 0. (1.14)
Es sei nun noch die ortliche Verteilung der Konzentration zum Anfangszeitpunkt t = 0 als bekannt voraus-
gesetzt, die Werte
u(x, 0) = u0(x) fur x ∈ [0, L] (1.15)
seien also gegeben. Ausserdem seien an den Randern noch Bedingungen an die Konzentration gegeben,
beispielsweise
u(0, t) = β1(t), u(L, t) = β2(t) fur t ≥ 0 (1.16)
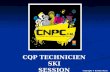
mit vorgegebenen Funktionen β1, β2 : R + → R. In Abbildung 1.2 sind die vorgegebenen Daten des
Anfangs Randwertproblems fur die Diffusionsgleichung in der Orts Zeit Ebene dargestellt.
Bemerkung 1.2 (a) Es handelt sich bei der Diffusionsgleichung (1.14) um eine lineare partielle Diffe-renzialgleichung zweiter Ordnung mit konstanten Koeffizienten fur die gesuchte Funktion u. Diese
Bezeichnungen ergeben sich genauso wie die entsprechenden Bezeichnungen fur die Transportgleichung
in Bemerkung 1.1 auf Seite 2. Die Ordnung Zwei der partiellen Differenzialgleichung ergibt sich aus der
hochsten auftretenden partiellen Ableitung. Wegen der auftretenden Randbedingungen (1.16) und der An-
fangsbedingung (1.15) spricht man kurz von einem Anfangs Randwertproblem. In anderen Anwendun-
gen konnen aber durchaus Anfangs und Randbedingungen von anderer Form auftreten konnen.

Abschnitt 1.3 Die Fouriersche Methode f ur die Diffusionsgleichung 5
0 L0 .................................................................................................................................
................ x
.....
....
.....
....
.....
.....
....
.....
....
.....
....
....................
................
t
∂u
∂t= c2
∂2u
∂x2
u(x, 0) = u0(x)
u(0, t) = β1(t) u(L, t) = β2(t)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Abbildung 1.2: Darstellung der Situation bei einem Anfangs-Randwertproblem fur die Diffusionsgleichung
in der Orts-Zeit-Ebene
(b) Zur Theorie der partiellen Differenzialgleichungen gehort die Diskussion der Existenz, der Eindeutig-
keit sowie der stetigen Abhangigkeit von den Anfangs- und den Randwerten. Fur die Diffusionsgleichung
werden diese Fragen in den Abschnitten 1.3 und 1.8 behandelt.
M
1.3 Die Fouriersche Methode f ur die Diffusionsgleichung
Im Folgenden wird das Anfangs Randwertproblem fur die Diffusionsgleichung (1.14) (1.16) betrachtet
fur homogene Randbedingungen u1(t) = u2(t) = 0 fur t ≥ 0. Es liegt somit das folgende Anfangs
Randwertproblem vor:
∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ [0, L], t ≥ 0,
u(0, t) = u(L, t) = 0 fur t ≥ 0,
u(x, 0) = u0(x) fur x ∈ [0, L].
(1.17)
Die Nullrandbedingungen erlauben einen speziellen Losungsweg, der im Folgenden vorgestellt wird. Er
beruht auf dem Ansatz der Trennung der Veranderlichen
u(x, t) = X(x)T (t), x ∈ [0, L], t ≥ 0, (1.18)
wobei auch von der Separation der Veranderlichen gesprochen wird. Dieser geschieht zunachst zur Ge-
winnung von allgemeinen Losungen der Diffusionsgleichung, Nullrand- und Anfangsbedingungen spielen
also zunachst keine Rolle. Einzelheiten hierzu werden im nachfolgenden Abschnitt 1.3.1 vorgestellt. In Ab-
schnitt 1.3.2 werden dann die vorgegebenen Randbedingungen berucksichtigt, und in Abschnitt 1.3.3 wird
eine Superposition der gewonnenen Losungen unter Anpassung der auftretenden Koeffizienten vorgenom-
men. Dies liefert schließlich die Losung des Anfangs Randwertproblems (1.17).

6 Kapitel 1 Transport und Diffusion
1.3.1 Trennung der Veranderlichen
Als Erstes werden Bedingungen an die Funktionen X : [0, L ] → R und T : R + → R hergeleitet, so dass
die zugehorige Funktion u aus (1.18) die Diffusionsgleichung∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ [0, L], t > 0
lost; Nullrand- und Anfangsbedingungen spielen also zunachst kein Rolle. Hierzu berechnet man ausgehend
von dem Ansatz (1.18) zunachst
∂u
∂t(x, t) = X(x)T ′(t),
∂2u
∂x2(x, t) = X ′′(x)T (t) fur x ∈ [0, L], t > 0,
so dass fur die Erfullung der Diffusionsgleichung notwendigerweise
c2X ′′(x)
X(x)=
T ′(t)
T (t)fur x ∈ [0, L], t > 0 (1.19)
gelten muss. Fur den Moment sei hierbei X (x) 6= 0 und T (t) 6= 0 fur alle x ∈ [0, L], t > 0 angenommen.
Diese Restriktion kann spater wieder fallen gelassen werden. Es ist nun so, dass die linke Seite der Identitat
(1.19) lediglich von der Ortsvariablen x und nicht von der Zeitvariablen t abhangt, und bei der rechten Seite
verhalt es sich genau umgekehrt. Dies bedeutet aber, dass beide Seiten der Identitat (1.19) notwendigerweise
konstant sein mussen, es gilt also
c2X ′′(x)
X(x)=
T ′(t)
T (t)= −s2 fur x ∈ [0, L], t > 0, (1.20)
mit einer noch zu spezifizierenden reellen Konstanten s2 > 0. Denkbar ware hier auch, in (1.20) auch
Konstanten s2 > 0 anstelle −s2 < 0 zuzulassen. Im Verlauf der weiteren Berechnungen stellt sich jedoch
heraus, dass sich damit die Randbedingungen nicht erfullen lassen. Daher kann man sich auch gleich auf
positive Konstante s2 beschranken, wobei sich durch die Verwendung von s2 > 0 anstelle von s > 0 die
Notation vereinfachen wird. Die Darstellung (1.20) fuhrt unmittelbar auf die beiden Gleichungen
X ′′(x) +( s
c
)2X(x) = 0 fur x ∈ [0, L], (1.21)
T ′(t) + s2T (t) = 0 fur t > 0. (1.22)
Bemerkung 1.3 Bei den Gleichungen (1.21) handelt es sich um lineare gewohnliche Differenzialglei-chungen zweiter Ordnung mit konstanten Koeffizienten fur die gesuchten Funktion X : [0, L ] → R.
Als gewohnliche Differenzialgleichung bezeichnet man sie, da die gesuchte Funktion X lediglich von einer
Veranderlichen abhangt und neben X noch Ableitungen von X in der Gleichung auftreten. Die weiteren
Bezeichnungen ergeben sich genauso wie die entsprechenden Bezeichnungen fur die Transportgleichung in
Bemerkung 1.1 auf Seite 2. Insbesondere ubersteigen die Hohe der auftretenden Ableitungen den Wert Zwei
nicht, weswegen man die gewohnliche Differenzialgleichung als von zweiter Ordnung bezeichnet.
Ganz entsprechend bezeichnet man die Gleichung (1.22) als lineare gewohnliche Differenzialgleichungerster Ordnung mit konstanten Koeffizienten fur die gesuchte Funktion T : [0, L ] → R. M
Losungen der gewohnlichen Differenzialgleichung (1.21) gewinnt man durch einen Exponentialansatz
X(x) = eλx fur x ∈ [0, L] (1.23)
mit einem zu bestimmenden Koeffizienten λ ∈ C. Zweimalige Differentiation in (1.23) liefert
X ′′(x) = λ2 eλx fur x ∈ [0, L],

Abschnitt 1.3 Die Fouriersche Methode f ur die Diffusionsgleichung 7
und die gewohnliche Differenzialgleichung (1.21) fur die gesuchte Funktion X geht dann uber in
[λ2 +
( sc
)2 ]eλx fur x ∈ [0, L]. (1.24)
Division in (1.24) durch den in jedem Fall von Null verschiedenen Wert eλx fuhrt auf die Bestimmungsglei-
chung λ2 = −(s/c)2, die eine Losung
λ = λs = isc
besitzt. Naturlich existiert noch eine zweite Losung λ = −is/c, die letztlich jedoch auf keine weiteren
reellwertigen Losungen der betrachteten gewohnlichen Differenzialgleichung (1.21) fuhrt. Der Exponenti-
alansatz (1.23) liefert also zu der gewohnlichen Differenzialgleichung (1.21) die komplexwertige Losung
Xs(x) = ei(s/c)x fur x ∈ [0, L].
Gesucht sind jedoch reellwertige Losungen der gewohnlichen Differenzialgleichung (1.21). Diese erhalt
man durch Heranziehung des Real und des Imaginarteils der Funktion Xs
Re Xs(x) = cos( (s/c)x), Im Xs(x) = sin( (s/c)x) fur x ∈ [0, L].
Diese Vorgehensweise ist allerdings nur deshalb zulassig, weil die in (1.21) auftretenden Koeffizienten reell
sind.
Eine Losung der gewohnlichen Differenzialgleichung (1.22) fur die gesuchte Funktion T gewinnt man eben-
falls durch einen Exponentialansatz
T (t) = eµt fur t ≥ 0 (1.25)
mit einem zu bestimmenden Koeffizienten µ ∈ R. Einmalige Differentiation in (1.25) liefert
T ′(t) = µeµt fur t ≥ 0,
und die gewohnliche Differenzialgleichung (1.22) fur die gesuchte Funktion T geht dann uber in
(µ + s2 )eµt fur t ≥ 0. (1.26)
Division in (1.26) durch den in jedem Fall von Null verschiedenen Wert eµt fuhrt auf die Losung
µ = µs = −s2. (1.27)
Der Exponentialansatz (1.25) liefert also zu der gewohnlichen Differenzialgleichung (1.22) fur die gesuchte
Funktion T die reellwertige Losung
Ts(t) = e−s2t fur t ≥ 0.
Die so gewonnenen Losungen der Diffusionsgleichung haben also die Form
Re Xs(x)Ts(t) = cos( (s/c)x)e−s2t fur x ∈ [0, L], t ≥ 0 ,
Im Xs(x)Ts(t) = sin( (s/c)x)e−s2t.................... .

8 Kapitel 1 Transport und Diffusion
1.3.2 Anpassung an die Randbedingungen
In diesem Abschnitt werden diejenigen Werte von s bestimmt, fur die Nullrandbedingungen aus (1.17)
erfullt sind. Wegen Ts(t) 6= 0 fur alle t ≥ 0 ist klar, dass man die Betrachtungen auf die Funktion Xs
beschranken kann. Dabei kommt wegen Re Xs(0) = cos 0 = 1 6= 0 nur der Imaginaranteil Im Xs in
Frage. Hier ist in x = 0 die Randbedingung stets erfullt,
Im Xs(0) = sin 0 = 0.
In dem Punkt x = L fuhrt die Randbedingung auf
Im Xs(L) = sin( (s/c)L) = 0,
was fur sL/c ∈ π, 2π, 3π, . . . erfullt ist. Letzteres umformuliert bedeutet
s ∈ k cπL
: k = 1, 2, . . ..
Somit stellen die Funktionen
uk(x, t) := sin(k
πLx)e−(kcπ/L)2t fur x ∈ [0, L], t ≥ 0,
k = 1, 2, . . . ,
(1.28)
jeweils Losungen der Diffusionsgleichung dar, die zudem alle die Nullrandbedingungen aus (1.17) erfullen.
1.3.3 Superposition – Anpassung an die Anfangsbedingung
Auf Grund der Linearitat der vorliegenden Differenzialgleichung und der auftretenden Nullrandbedingun-
gen sind endliche Linearkombinationen der Funktionen uk fur k = 1, 2, . . . ebenfalls Losungen der be-
trachteten Differenzialgleichung, die zugleich wie gefordert an den beiden Randern verschwinden. Es ist
naheliegend, auch Funktionen von der Form
u(x, t) =∞
X
k=1
ckuk(x, t) fur x ∈ [0, L], t ≥ 0 (1.29)
zu betrachten mit den Funktionen uk aus (1.28). Hierbei wird zunachst ohne weitere Diskussion eine hin-
reichend gute Konvergenz der auftretenden Reihe sowie hinreichend gute Differenzierbarkeitseigenschaften
der Grenzfunktion u angenommen. Eine mathematische Analysis der vorgestellten Vorgehensweise wird
dann in Abschnitt 1.5 gefuhrt.
Formal erhalt man
u(x, 0) =∞
X
k=1
ckuk(x, 0) =∞
X
k=1
ck sin(k
πLx) !
= u0(x) fur x ∈ [0, L ]. (1.30)
Der Unterschied zu einer gewohnlichen Fourier Entwicklung fur die Funktion u0 besteht hierbei darin, dass
zum einen die auftretenden trignonometrischen Funktionen 2L periodisch sind und zum anderen keine
Terme mit Cosinus Funktionen auftreten. Eine solche Darstellung (1.30) erhalt man jedoch durch eine
ungerade Fortsetzung der Funktion u0 auf das Intervall [−L, 0],
u0(–x) := −u0(x) fur x ∈ [0, L ].
Eine Fourierentwicklung der entstehenden ungeraden Funktion u0 : [−L,L ] → R liefert tatsachlich
u0(x) =∞
X
k=1
ck sin(k
πLx)
+∞
X
j=0
dj cos(j
πLx)
fur x ∈ [0, L] (1.31)

Abschnitt 1.4 Einf uhrung in die Theorie der Fourierreihen 9
mit den Fourierkoeffizienten
ck =1L
Z L
−Lu0(y ) sin
(k
πLy)dy =
2L
Z L
0u0(y ) sin
(k
πLy)dy fur k = 1, 2, . . . , (1.32)
dj =1L
Z L
−Lu0(y ) cos
(j
πLy)dy = 0 fur j = 0, 1, . . . .
Eine Setzung (1.28) mit einer Wahl der Koeffizienten ck gemaß (1.32) liefert schließlich formal die gesuchte
Losung des Anfangs Randwertproblems (1.17) fur die Diffusionsgleichung.
1.4 Einf uhrung in die Theorie der Fourierreihen
Thema des vorliegenden Abschnitts ist die Approximation von Funktionen f : R → R durch Uberlagerung
von Sinus- und Cosinus-Schwingungen unterschiedlicher Frequenzen.
1.4.1 Orthogonalitat trigonometrischer Monome
Die Grundlage fur die vorzustellende Theorie bilden die folgenden Orthogonalitatseigenschaften fur die
reellen trigonometrischen Monome.
Lemma 1.4 Es gilt
Z 2π
0cosnx · cosmxdx =
Z 2π
0sinnx · sinmxdx = 0 fur n, m = 0, 1, . . . mit n 6= m,
Z 2π
0cosnx · sinmxdx = 0 fur n, m = 0, 1, . . .,
Z 2π
0cos2 nxdx =
Z 2π
0sin2 nxdx = π fur n = 1, 2, . . .,
sowie trivialerweiseZ 2π
0cos2 0x dx = 2π,
Z 2π
0sin2 0x dx = 0.
Die Aussagen von Lemma 1.4 lassen sich mithilfe von Additionstheoremen fur trigonometrische Funktionen
nachweisen. Einfacher geht es jedoch unter Anwendung der Eulerschen Formel
eit = cos t + i sin t, i =√−1 (t ∈ R ),
und des nachfolgenden Lemmas. Im Folgenden bezeichnet δn,m das Kronecker-Symbol, es gilt also δn,m =
0 fur n 6= m und δn,n = 0 fur n 6= m.
Lemma 1.5Z 2π
0einx · e−imx dx = 2πδn,m fur n, m ∈ Z. (1.33)
BEWEIS. Die Identitat (1.33) ist im Fall n = m offensichtlich richtig, und im Fall n 6= m ergibt sie sich so:
Z 2π
0einx · e−imx dx =
Z 2π
0ei(n−m)x dx =
−in − m
= 1 − 1 = 0︷ ︸︸ ︷
ei(n−m)x∣∣x=2π
x=0= 0.

10 Kapitel 1 Transport und Diffusion
Mithilfe der Identitat (1.33) lassen sich die Aussagen von Lemma 1.4 unmittelbar herleiten.
BEWEIS VON LEMMA 1.4. Die Identitat (1.33) zusammen mit der Eulerschen Formel bedeutet
2πδn,m =Z 2π
0
(cosnx + i sinnx
)(cosmx − i sinmx
)dx
=Z 2π
0cosnx cosmx + sinnx · sinmxdx + i
Z 2π
0cosnx sinmx − sinnx · cosmxdx
fur n, m ∈ Z.
Daraus erhalt manZ 2π
0cosnx cosmx + sinnx · sinmxdx = 2πδn,m fur n, m = 0, 1, . . . , (1.34)
Z 2π
0cosnx sinmx − sinnx · cosmxdx = 0 ..........
.......... . (1.35)
Fur nichtpositive Werte von m erhalt man entsprechend
Z 2π
0cosnx cosmx − sinnx · sinmxdx = 2πδn,−m fur n, m = 0, 1, . . . , (1.36)
Z 2π
0cosnx sinmx + sinnx · cosmxdx = 0 ..........
.......... . (1.37)
Eine Addition der Identitaten (1.34) und (1.36) liefert dann
Z 2π
0cosnx cosmxdx = π(δn,m + δn,−m ) =
0 fur n 6= m,
π fur n = m > 0,
2π fur n = m = 0,
und eine Subtraktion der Identitaten (1.34) und (1.36) liefert
Z 2π
0sinnx sinmxdx = π(δn,m − δn,−m ) =
π fur n = m > 0,
0 fur n 6= m oder n = m = 0.
Eine Addition der Identitaten (1.36) und (1.37) liefert schließlichZ 2π
0cosnx sinmxdx = 0.
Dies komplettiert den Beweis.
1.4.2 Fourierreihen reellwertiger und komplexwertiger Funktionen
Im Folgenden wird die Fourierreihe einer Riemann integrierbaren Funktionen f : [0, 2π ] → R betrachtet.
Sie besitzt die Form a02
+∑∞
n=1[an cosnx+ bn sinnx ] mit den reellen Fourierkoeffizienten
an :=1π
Z 2π
0f (y ) cosny dy, bn :=
1π
Z 2π
0f (y ) sinny dy, (1.38)
fur n = 0, 1, . . . . Als Kurzschreibweise fur die Fourierreihe der reellwertigen Funktion f wird die Notation
f (x) ∼ a0
2+
∞X
n=1
[an cosnx + bn sinnx
](1.39)
verwendet.

Abschnitt 1.4 Einf uhrung in die Theorie der Fourierreihen 11
Bemerkung 1.6 Die Setzungen (1.38) sind vernunftig. Hierzu nehmen wir an, dass die Reihe in (1.39) mit
irgendwelchen reellen Koeffizienten an und bn gleichmaßig gegen die Funktion f konvergiert, also
supx∈[ 0 ,2π ]
∣∣f (x) −
a0
2+
sX
n=1
[an cosnx + bn sinnx
]∣∣→ 0 fur s→ ∞ (1.40)
erfullt ist. In dieser Situation gelten auf Grund der in Lemma 1.4.1 vorgestellten Orthogonalitatsbeziehungen
notwendigerweise die Identitaten (1.38). Dies erhalt man fur die Koeffizienten an folgendermaßen,
Z 2π
0f (y ) cosny dy
=a0
2
2πδ0,n︷ ︸︸ ︷Z 2π
0cosny dy +
∞X
m=1
[am
= πδm,n︷ ︸︸ ︷Z 2π
0cosmy · cosny dy + bm
= 0︷ ︸︸ ︷Z 2π
0sinmy · cosny dy
]
= πan.
Die Vertauschung von Integration und Summation ist auf Grund der gleichmaßigen Konvergenz der Reihe
zulassig. Die Darstellung in (1.38) fur die Fourierkoeffizienten bn erhalt man auf vergleichbare Weise. M
Eine zentrale Fragestellung ist die Frage der Konvergenz der Fourierreihe. Dies wird im Abschnitt 1.4.3
genauer behandelt.
Die Fourierreihe einer Riemann integrierbaren Funktionen f : [0, 2π ] → C besitzt die Form∑∞
n=−∞ cneinx
mit den komplexen Fourierkoeffizienten
cn :=12π
Z 2π
0f (y )e−iny dy, n ∈ Z. (1.41)
In die Fourierreihe ist die Folge der Partialsummen hier von der Form∑s
n=−s fur s = 1, 2, . . . . Als
Kurzschreibweise fur die Fourierreihe der komplexwertigen Funktion f wird die Notation
f (x) ∼∞
X
n=−∞cne
inx (1.42)
verwendet. Die Setzung (1.41) lasst sich dabei genauso wie die entsprechende Setzung bei reellen Fourier-
reihen rechtfertigen (siehe Bemerkung 1.6).
Fur reellwertige Funktionen sind die beiden Fourierreihen identisch. Hierzu stellt man zuerst fest, dass fur
eine Funktion f : [0, 2π ] → R zwischen den Koeffizienten in (1.38) und (1.41) der folgende Zusammen-
hang (fur k ∈ N0 ) besteht:
cn =an − ibn
2, c−n =
an + ibn
2,
an = Re cn bn = Im cn.
Daraus folgt
cneinx + c−ne
−inx =12
(an − ibn )(
cosnx + i sinnx)
+ (an + ibn )(
cosnx − i sinnx)
=12
an cosnx + bn sinnx + i(− bn cosnx + an sinnx + bn cosnx − an sinnx︸ ︷︷ ︸
= 0
)
.
Fur reellwertige Funktionen stimmen also die reelle und die komplexe Fourierreihe tatsachlich uberein.

12 Kapitel 1 Transport und Diffusion
1.4.3 Konvergenz von Fourierreihen
Lemma 1.7 Fur eine Riemann integrierbare Funktion f : [0, 2π ] → C gilt
Z 2π
0
∣∣f (y ) −
sX
n=−s
cneiny∣∣2dy =
Z 2π
0|f (y )|2 dy − 2π
sX
n=−s
|cn |2 fur s = 0, 1, . . . . (1.43)
Insbesondere gilt die Besselsche Ungleichung
2π∞
X
n=−∞|cn |2 ≤
Z 2π
0|f (y )|2 dy. (1.44)
BEWEIS. Es gilt
Z 2π
0
∣∣f (y ) −
sX
n=−s
cneiny∣∣2dy
=Z 2π
0|f (y )|2 dy − 2
sX
n=−s
[cn
Z 2π
0f (y )e−iny dy
︸ ︷︷ ︸
= 2πcn
]+
sX
n,m=−s
cncmδn,m2π
=Z 2π
0|f (y )|2 dy − 2π
sX
n=−s
|cn |2
unter Berucksichtigung der Identitat
|z1 − z2 |2 = (z1 − z2 )(z1 − z2 )2 = |z1 |2 − 2Re (z1z2 ) + |z2 |2 fur z1, z2 ∈ C.
Die Besselsche Ungleichung folgt nun nach dem Grenzubergang s → ∞ in der Identitat (1.43), unter
Berucksichtigung der Nichtnegativitat der rechten Seite von (1.43).
Definition 1.8 Eine Folge fs : [0, 2π ] → C Riemann integrierbarer Funktionen heißt im quadratischenMittel konvergent gegen eine Riemann integrierbare Funktion f : [0, 2π ] → C, falls
Z 2π
0|fs(y ) − f (y )|2 dy → 0 fur s→ ∞.
Theorem 1.9 Die Fourierreihe einer Riemann-integrierbaren Funktion f : [0, 2π ] → C konvergiert im
quadratischen Mittel gegen f .
BEWEIS. Aus der Identitat (1.43) folgt unmittelbar, dass die Fourierreihe einer Riemann-integrierbaren
Funktion f : [0, 2π ] → C genau dann im quadratischen Mittel gegen die Funktion f konvergiert, wenn
die Identitat
2π∞
X
n=−∞|cn |2 =
Z 2π
0|f (y )|2 dy (1.45)
erfullt ist. Die Gultigkeit dieser Identiat weist man zunachst fur Treppenfunktionen und danach fur allge-
meine Riemann-integrierbare Funktionen nach. Die Details werden ausgelassen.
Die Fourierkoeffizienten einer 2π-periodischen Funktion f : R → C fallen umso schneller, je glatter die
Funktion f ist:

Abschnitt 1.4 Einf uhrung in die Theorie der Fourierreihen 13
Proposition 1.10 Ist die Funktion f : R → C 2π periodisch und r mal stetig differenzierbar mit r ≥ 0,
so gilt
cn =12π
1(in)r
Z 2π
0f (r)(y )e−iny dy, n ∈ Z\0. (1.46)
Insbesondere gilt also
cn = O(|n|−r ) fur |n| → ∞. (1.47)
BEWEIS. Wiederholte partielle Integration liefert
2πcn =Z 2π
0f (y )e−iny dy = − 1
in
= 0︷ ︸︸ ︷
f (y )e−iny∣∣2π
0+
1in
Z 2π
0f ′(y )e−iny dy
=1
( in)2
Z 2π
0f ′′(y )e−iny dy =
1
(in)3
Z 2π
0f (3)(y )e−iny dy = . . .
. . . =1
(in)r
Z 2π
0f (r)(y )e−iny dy.
Damit gilt auch
|cn | ≤ 12πn−r
Z 2π
0|f (r)(y )| dy ≤
(
maxy∈[ 0 ,2π ]
|f (r)(y )|)
|n|−r
und damit (1.47)
Theorem 1.11 Ist die Funktion f : R → C 2π periodisch und einmal stetig differenzierbar, so gilt∞
X
n=−∞|cn | <∞,
und die Fourierreihe der Funktion f konvergiert gleichmaßig gegen f .
BEWEIS. Die Darstellung (1.46) fur r = 1 bedeutet
|cn | = |n|−1|dn | mit dn =12π
Z 2π
0f ′(y )e−iny dy. (n ∈ Z\0 ).
Die Besselsche Ungleichung liefert∑∞
n=−∞ |dn |2 <∞, und die Cauchy Schwarzsche Ungleichung liefert
dann∞
X
n=−∞|cn | ≤
(
|c0 | + 2∞
X
n=1
n−2)1/2
·( ∞
X
n=−∞|dn |2
)1/2
< ∞.
Damit gilt fur die Fourierreihe von f∞
X
n=−∞sup
x∈[ 0 ,2π ]
∣∣cne
inx∣∣ =
∞X
n=−∞
∣∣cn
∣∣ < ∞,
und nach dem Konververgenzkriterium von Weierstraß konvergiert die Fourierreihe von f daher auf dem
Intervall [0, 2π ] gleichmaßig gegen eine Funktion ψ : [0, 2π ] → C. WegenZ 2π
0|f (y ) − ψ(y )|2 dy =
Z 2π
0
∣∣∣
f (y ) −∞
X
n=−∞cne
iny
+ ∞
X
n=−∞cne
iny − ψ(y )
∣∣∣
2
dy
≤ 2( Z 2π
0
∣∣f (y ) −
∞X
n=−∞cne
iny∣∣2dy
︸ ︷︷ ︸
= 0
+Z 2π
0
∣∣
∞X
n=−∞cne
iny − ψ(y )
︸ ︷︷ ︸
= 0
∣∣2dy)
= 0
und damit ψ = f . Dies komplettiert den Beweis.

14 Kapitel 1 Transport und Diffusion
1.4.4 Fourierentwicklung gerader und ungerader Funktionen
Proposition 1.12 Sei f : [0, 2π ] → R eine Riemann-integrierbare Funktion.
(a) Ist f ungerade bezuglich des Intervallmittelpunkts x = π, das heißt,
f (π + x) = f (π − x) fur x ∈ [0, 2π ],
so gilt ak = 0 fur k = 1, 2, . . . .
(b) Ist f gerade bezuglich des Intervallmittelpunkts x = π, das heißt,
f (π + x) = −f (π − x) fur x ∈ [0, 2π ],
so gilt bk = 0 fur k = 0, 1, . . . .
BEWEIS. Ubung.
1.4.5 Allgemeine Intervalle
Fourierentwicklungen fur Funktionen mit anderen Definitionsbereichen lassen sich durch einfache Trans-
formationen gewinnen. Fur eine gegebene Funktion
f : [0, L ] → R
betrachtet man die folgende Variablentransformation und die zugehorige Funktion,
x :=2πLx ∈ [0, 2π ] fur x ∈ [0, L ], f : [0, 2π ] → R, f (x) = f (x) fur x ∈ [0, L ].
(1.48)
Als Fourierreihe fur die Funktion f erhalt man dann
f (x) = f (x) ∼ a0
2+
∞X
n=1
[an cosnx + bn sinnx
]
=a0
2+
∞X
n=1
[
an cos(n
2πLx)
+ bn sin(n
2πLx)]
(1.49)
mit den reellen Fourierkoeffizienten
an =1π
Z 2π
0f (y) cosny dy =
2L
Z L
0f (y ) cos
(n
2πLy)dy
bn =1π
Z 2π
0f (y) sinny dy =
2L
Z L
0f (y ) sin
(n
2πLy)dy fur n = 0, 1, . . . (1.50)
unter Verwendung der Identitaten
y :=2πLy ∈ [0, 2π ] fur y ∈ [0, L ], dy =
2πLdy. (1.51)
Entsprechend erhalt man eine Fourierentwicklung fur komplexwertige Funktionen
f : [0, L ] → C.
Hierzu betrachtet man erneut die Transformation (1.48) (dort ist dann R durch C zu ersetzen) und erhalt als
Fourierreihe fur die Funktion f
f (x) = f (x) ∼∞
X
n=∞cne
inx =∞
X
n=1
cnein(2π/L)x (1.52)

Abschnitt 1.5 Mathematische Analysis zum Separationsansatz 15
mit den komplexen Fourierkoeffizienten
cn =12π
Z 2π
0f (y )einy dy =
1L
Z L
0f (y )ei(n(2π/L)y ) dy fur n = 0, 1, . . . (1.53)
unter Verwendung der Transformation (1.51).
1.5 Mathematische Analysis zum Separationsansatz
Die formale Vorgehensweise soll nun noch mathematisch gerechtfertigt werden. Hierzu wird zunachst an-
genommen, dass die Funktion u0 auf dem Intervall [0, L ] stetig ist, so dass dann die Fourierkoeffizienten
c0, c1, . . . wohldefiniert sind. Die Partialsummen in (1.29) stellen dann auf der Menge [0, L ] × t > 0unendlich oft partiell differenzierbare Funktionen dar, und die partiellen Ableitungen lassen sich folgender-
maßen abschatzen:∣∣ ∂
r+suk
∂xr∂ts (x, t)∣∣ ≤
(k
πL
)r+2sc2se−(kcπ/L)2t fur x ∈ [0, L], t ≥ 0 (r, s ∈ N0 ).
Wegen der vorliegenden Stetigkeit der Funktion u0 : [0, L ] → R ist auch die Folge der Fourierkoeffizienten
beschrankt es gilt also
supk=0,1,...
|ck | ≤ M
(siehe (1.47)). Daraus erhalt man fur beliebige Zahlen 0 < tmin
supx∈[ 0,L ], t≥tmin
∞X
k=1
|ck∂r+suk
∂xr∂ts (x, t)| ≤ C∞
X
k=1
kr+2sqk2
< ∞
mit den Notationen
C := M( π
L
)r+2sc2s, q := e−(cπ/L)2tmin (r, s ∈ N0 ).
Damit konvergieren nach dem Satz von Weierstraß alle partiellen Ableitungen der Partialsummen in (1.29)
auf Mengen von der Form [0, L ] × [tmin , T ] gleichmaßig (mit beliebigen Zahlen 0 < tmin ≤ T ). Die
Grenzfunktion u in (1.29) ist also auf der Menge [0, L ] × t > 0 wohldefiniert und dort ebenfalls unend-
lich oft partiell differenzierbar. Außerdem stellt diese Funktion u eine Losung der Diffusionsgleichung aus
(1.17) dar, die zudem zu allen Zeiten an den beiden Randpunkten x = 0 und x = L verschwindet, da die
Funktionen u1, u2, . . . diese Eigenschaften besitzen.
Es ist noch das Verhalten der Funktion u zur Zeit t = 0 zu betrachten. Im Falle einer stetigen Funktion
u0 : [0, L ] → R liefert die Theorie der Fourier Reihen bekanntermaßen Konvergenz der Partialsummen
gegen die vorgegebenen Anfangswerte im quadratischen Mittel.
Die gewonnenen Resultate werden im nachfolgenden Theorem zusammenfasst.
Theorem 1.13 Fur eine stetige Funktion u0 : [0, L ] → R konvergiert die Reihe (1.29) mit den Notatio-
nen aus (1.28) und (1.32) und liefert eine auf [0, L] × t > 0 unendlich oft differenzierbare Losung des
Anfangs Randwertproblems (1.17). Dabei konvergieren fur t = 0 die Partialsummen in (1.29) auf dem
Interval [0, L] im quadratischen Mittel gegen die Funktion u0.
Unter etwas scharferen Voraussetzungen fur die Funktion u0 lassen sich weitere Aussagen treffen.
Theorem 1.14 In Erganzung zu den Voraussetzungen aus Theorem 1.13 gelte noch
u0 ∈ C1(R ), u0(0) = u0(L) = 0.

16 Kapitel 1 Transport und Diffusion
Dann ist die Funktion u aus Theorem 1.13 in allen Anfangspunkten (x, t = 0) mit x ∈ [0, L] stetig. Fur
t = 0 konvergieren die Partialsummen in (1.29) auf dem Interval [0, L] gleichmaßig gegen die Funktion u0.
BEWEIS. Theorem 1.11 liefert∑∞
k=1 |ck | < ∞. Eine Vorgehensweise entsprechend der im Beweis von
Theorem 1.13 mit einer Anwendung des Satzes von Weierstraß liefert dann die Aussage von Theorem 1.14.
1.6 Losungsdarstellung uber die Greensche Funktion
Es wird hier noch eine weitere Losungsdarstellung fur die fur das Anfangs Randwertproblem (1.17) fur
die homogene Diffusionsgleichung mit Nullrandbedingungen angegeben. Hierzu betrachtet man wieder die
Reihensdarstellung (1.29) mit den Notationen aus (1.28) und (1.32). Eine Vertauschung von Integration und
Summation liefert dann die Darstellung
u(x, t) =Z L
0G (x, y, t)u0(y )dy fur x ∈ [0, L], t ≥ 0 (1.54)
mit G(x, y, t) =2L
∞X
k=1
sin(k
πLx)sin(k
πLy)e−(kcπ/L)2t. (1.55)
Die Funktion G bezeichnet man als Greensche Funktion zu dem vorliegenden Anfangs Randwertproblem.
1.7 Separationsansatz f ur die inhomogene Warmeleitungsgleichung
1.7.1 Nullrand- und Anfangsbedingungen
Es wird nun das folgende Anfangs-Randwertproblem fur die Diffusionsgleichung betrachtet,
∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) + f (x, t) fur x ∈ [0, L], t > 0,
u(0, t) = u(L, t) = 0 fur t ≥ 0,
u(x, 0) = 0 fur x ∈ [0, L ]
(1.56)
mit einer gegebenen Funktion f : [0, L] × R+ → R. Hier setzt man folgendermaßen an,
u(x, t) =∞
X
k=1
ck(t) sin(k π
Lx)
fur x ∈ [0, L], t ≥ 0. (1.57)
Hierbei wird eine hinreichend gute Konvergenz der auftretenden Reihe sowie hinreichend gute Differenzier-
barkeitseigenschaften der Grenzfunktion u vorausgesetzt. Fur die Funktion f verwendet man die Fourier-
entwicklung
f (x, t) =∞
X
k=1
fk(t) sin(k π
Lx)
fur x ∈ [0, L], t ≥ 0 (1.58)
und erhalt daraus sowie aus der in (1.56) betrachteten Differenzialgleichung die notwendige Bedingung

Abschnitt 1.7 Separationsansatz f ur die inhomogene W armeleitungsgleichung 17
∞X
k=1
sin(k π
Lx)[( kπc
L
)2ck(t) + c ′k(t) − fk(t)
]
= 0.
Hieraus ergeben sich die Bedingungen
c ′k(t) +( kπc
L
)2ck(t) = fk(t) fur t > 0 (k = 1, 2, . . . ). (1.59)
Die Anfangsbedingung fur die zu bestimmenden Funktionen c1, c2, . . . ergeben sich aus (1.56),
ck(0) = 0 fur k = 1, 2, . . . . (1.60)
Bei (1.59) (1.60) handelt es sich fur jedes k um ein Anfangswertproblem fur eine inhomogene gewohnliche
Differenzialgleichung erster Ordnung, deren Losung sich explizit angeben lasst:
ck(t) =Z t
0e−(kπc/L)2(t−τ )fk(τ ) dτ fur k = 1, 2, . . . ,
so dass sich fur die Losung u(x, t) die Darstellung
u(x, t) =∞
X
k=1
sin(k π
Lx)[ Z t
0e−(kπc/L)2(t−τ )fk(t) dτ
]
ergibt. Verwendet man noch die Darstellung
fk(τ ) =2L
Z L
0f (ξ, τ ) sin
(k
cπLξ)dξ fur k = 1, 2, . . .
fur die Fourierkoeffizienten (fk(τ ))k=0,1,... der Funktion f (·, τ ), so erhalt man schließlich nach Vertau-
schung von Integration und Summation
u(x, t) =Z t
0
Z L
0G(x, ξ, t− τ )f (ξ, τ ) dξ dτ
mit der Greenschen Funktion G aus (1.55).
1.7.2 Allgemeine Rand- und Anfangsbedingungen
Es wird nun das folgende Anfangs-Randwertproblem fur die Diffusionsgleichung betrachtet:
∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) + f (x, t) fur x ∈ [0, L], t ≥ 0,
u(0, t) = u1(t), u(L, t) = u2(t) fur t ≥ 0,
u(x, 0) = u0(x) fur x ∈ [0, L].
(1.61)
Hier kann man wie folgt verfahren: man erzeugt zunachst eine Aufgabe mit homogenen Randbedingungen
durch Verwendung einer Funktion ϕ(x, t) mit den Eigenschaften
ϕ(0, t) = u1(t), ϕ(L, t) = u2(t) fur t ≥ 0.
Es ist dann offensichtlich die Funktion u eine Losung von (1.61) genau dann, wenn die Funktion
v(x, t) = u(x, t) − ϕ(x, t) fur (x, t) ∈ [0, L] × R+ (1.62)

18 Kapitel 1 Transport und Diffusion
die Losung des Anfangs-Randwertproblems
∂v
∂t(x, t) = c2
∂2v
∂x2(x, t) +
[
f (x, t) − ∂ϕ
∂t(x, t) + c2
∂2ϕ
∂x2(x, t)
]
fur x ∈ [0, L], t ≥ 0,
v(0, t) = v(L, t) = 0 fur t ≥ 0,
v(x, 0) = u0(x) − ϕ(x, 0) fur x ∈ [0, L],
(1.63)
ist. Es handelt sich bei (1.63) um ein Anfangs-Randwertproblem fur die inhomogene Diffusionsgleichung
mit homogenen Randwerten. Dieses lasst sich in zwei Teilprobleme zerlegen:
• Man lost zum einen die zu (1.63) gehorende homogene Gleichung, das heißt, der Term in den eckigen
Klammern dort ist durch Null zu ersetzen.• Zudem lost man das Problem (1.63) fur homogene Anfangsbedingungen, das heißt, die Anfangswerte
sind dort Null zu setzen.
Diese beiden Losungen konnen mit dem bereits vorgestellten Separationsansatz berechnet werden. Deren
“Uberlagerung“ liefert dann die Losung v zu dem Anfangs-Randwertproblem (1.63). Mit der Darstellung
(1.62) gewinnt man dann schließlich die Losung u(x, t) zu dem Anfangs-Randwertproblem (1.61).
1.8 Maximum–Minimum–Prinzip
Sei G ⊂ R2 ein beschrankte offene Menge mit der Eigenschaft
G ⊂ (x, t) ∈ R2, t ≤ T , (1.64)
G ∩ (x, T ) : x ∈ R = (x, T ) ∈ R2, a ≤ x ≤ b =: D1 (1.65)
fur reelle Zahlen a < b und eine reelle Zahl T > 0. Hierbei bezeichnet G den Abschluss der Menge G. Der
“obere Rand“ der Menge G bildet somit eine Strecke, deren Inneres hier mit D1 bezeichnet wird,
D1 := (x, T ) ∈ R2, a < x < b.
Im Folgenden bezeichne noch
D2 := ∂G\D1. (1.66)
den verbleibenden Teil des Randes ∂G der Menge G. Wir betrachten im Folgenden eine Funktion u : G → R
mit der Eigenschaft
∂u
∂t= c2
∂2u
∂x2 auf G ∪ D1. (1.67)
Die Situation ist in Abbildung 1.3 dargestellt.
Theorem 1.15 (Minimum-Maximum-Prinzip ) Sei u : G → R eine stetige Funktion, die auf G ∪ D1
der homogenen Warmeleitungsgleichung (1.67) genugt, wobei die Bezeichnungen (1.64) (1.66) verwendet
werden. Dann nimmt die Funktion u auf dem Teilstuck D2 des Randes ∂G ihr Maximum und ihr Minimum
an.

Abschnitt 1.8 Maximum– Minimum– Prinzip 19
00
T
......................................................
... x
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....................
................
t
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
∂u
∂t= c2
∂2u
∂x2
G
D1
D2
Abbildung 1.3: Darstellung des Maximum-Minimum-Prinzips fur die raumlich eindimensionale Diffusi-
onsgleichung in der Orts-Zeit-Ebene
BEWEIS. Man betrachtet fur beliebiges ε > 0 die stetige Hilfsfunktion
v(ε)(x, t) := u(x, t) − εt fur (x, t) ∈ Gund zeigen im Folgenden, dass die Funktion v(ε) ihr Maximum auf dem Teilstuck D2 des Randes von Gannimmt. Hierzu nehmen wir im Widerspruch dazu an, dass die Funktion v (ε) in einem Punkt (x0, t0 ) 6∈ D2
ihr Maximum annimmt. Als notwendiges Kriterium fur ein Maximum erhalt man
∂2v(ε)
∂x2(x0, t0 ) ≤ 0,
und daraus resultiert∂v(ε)
∂t(x0, t0 ) =
∂u
∂t(x0, t0 ) − ε =
∂2u
∂x2(x0, t0 ) − ε =
∂2v(ε)
∂x2(x0, t0 ) − ε ≤ −ε.
Man wahlt nun die reelle Zahl ..................................................................................... t > 0 hinreichend klein, so dass∂v
∂t(x0, t) ≤ − ε
2fur t0 − ................
..................................................................... t ≤ t ≤ t0
gilt. Daraus ergibt sich
v(ε)(x0, t0 ) − v(ε)(x0, t0 − ..................................................................................... t) =
Z t0
t0−..................................................................................... t
∂v
∂t(x0, t) dt ≤ − ε
2..................................................................................... t,
so dass v(ε)(x0, t0 ) < v(ε)(x0, t0 − ..................................................................................... t) gilt und damit im Widerspruch zur Annahme v(ε)(x0, t0 ) kein
maximaler Wert der Funktion v(ε) auf G ist. Demnach nimmt die Funktion v(ε) doch ihr Maximum auf dem
Teilstuck D2 des Randes von G an.
Es liegt gleichmaßige Konvergenz der Funktionen v(ε) vor,
max(x,t)∈G
|v(ε)(x, t) − u(x, t)| = ε max(x,t)∈G
t,
und daraus erhalt man
max(x,t)∈G
u(x, t) ≤ εT + max(x,t)∈G
v(ε)(x, t) = εT + max(x,t)∈D2
v(ε)(x, t)
≤ 2εT + max(x,t)∈D2
u(x, t).
Der Grenzubergang ε→ 0 zeigt nun, dass auch die Funktion u ihr Maximum auf dem Teilstuck D2 annimmt.
Die Aussage uber das Minimum erhalt man durch Anwendung des Maximumprinzips auf die Funktion −u,
denn auch diese erfullt (1.67) und es gilt

20 Kapitel 1 Transport und Diffusion
min(x,t)∈G
u(x, t) = − max(x,t)∈G
(−u)(x, t) = − max(x,t)∈D2
(−u)(x, t) = min(x,t)∈D2
u(x, t).
Theorem 1.16 Seien ϕ : D2 → R und f : G ∪ D1 → R gegebene Funktionen, wobei die Bezeichnungen
(1.64) (1.66) verwendet werden. Dann existiert hochstens eine Losung u des Anfangs Randwertproblems
∂u
∂t= c2
∂2u
∂x2 + f (x, t) auf G ∪ D1, u = ϕ auf D2. (1.68)
BEWEIS. Fur zwei Losungen u1, u2 des Anfangs Randwertproblems (1.68) betrachtet man die Differenz
u = u1 − u2. Diese stellt eine Losung der homogenen Warmeleitungsgleichung (1.67) dar, die zudem auf
dem Teilstuck D2 des Randes verschwindet. Nach dem Maximum Minimum Prinzip gilt damit aber u = 0
beziehungsweise u1 = u2 auf dem gesamten Gebiet G.
Es werden nun noch Stabilitatsfragen behandelt.
Theorem 1.17 Seien ϕ : D2 → R und f : G ∪ D1 → R gegebene Funktionen, wobei die Bezeichnungen
(1.64) (1.66) verwendet werden. Seien u1, u2 Losungen der inhomogenen Diffusionsgleichung∂u
∂t= c2
∂2u
∂x2 + f (x, t) auf G ∪ D1
mit
|u1 − u2 | ≤ ε auf D2.
Dann gilt |u1 − u2 | ≤ ε auf G.
BEWEIS. Man betrachtet wiederum die Differenz u = u1 − u2. Diese stellt eine Losung der homogenen
Warmeleitungsgleichung (1.67) dar, fur die zudem auf dem Teilstuck D2 des Randes Folgendes gilt,
−ε ≤ u ≤ ε auf D2.
Nach dem Maximum Minimum Prinzip gilt damit aber −ε ≤ u ≤ ε auf dem gesamten Gebiet G, was mit
der Aussage des Theorems ubereinstimmt.
1.9 Das Anfangswertproblem f ur die Diffusionsgleichung– die raumlich un-beschrankte Situation
Wir betrachten hier das Anfangswertproblem fur die raumlich unbeschrankte Diffusionsgleichung,
∂u
∂t(x, t) =
∂2u
∂x2(x, t) fur x ∈ R, t > 0,
u(x, 0) = u0(x) fur x ∈ R.(1.69)

Abschnitt 1.9 Anfangswertproblem f ur die eindimensionale Diffusionsgleichung 21
Fur die Darstellung der Losung des vorgegebenen Problems (1.69) fur die Diffusionsgleichung betrachten
wir die Funktion
u(x, t) =Z ∞
−∞K(x− ξ, t)u0(ξ ) dξ fur x ∈ R, t > 0, (1.70)
mit K(σ, t) :=1√4πt
exp(− σ2
4t
)fur σ ∈ R, t > 0. (1.71)
Fur verschiedene Werte von t ist der Verlauf der Funktion K (·, t) in Abbildung 1.4 dargestellt.
−2 −1 0 1 2x
K(·, 0.05)
K(·, 0.1)
K(·, 0.15)
K(·, 0.25)
0
1
........................................................
.....................................................................................................................................................................................................................................................................................................
.....................................
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.....................................................
..............................
....................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
............................................
..............................
.......................................................................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................
........................................
.............................
.......................................................................................................................................................................................................................................................................................................
..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
...................................................................
...........................................
...............................
............................
.........................................................................................................................................................................................................................................................
..................................
.............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
Abbildung 1.4 Verlauf von K(·, t) fur die Werte t = 0.05, 0.1, . . . 2.5.
Lemma 1.18 Die Funktion K aus (1.71) ist auf R × t > 0 unendlich oft differenzierbar. Es gilt
∂K
∂t(x, t) =
∂2K
∂x2(x, t) fur x ∈ R, t > 0, (1.72)
Z ∞
−∞K(ξ, t) dξ = 1 fur t > 0. (1.73)
BEWEIS. Die Rechnung
∂K
∂t(x, t) =
1
t√
4πtexp
(− x2
4t
)[− 1
2+
x2
4t
],
∂K
∂x(x, t) = − x
t√
4πtexp
(− x2
4t
),
∂2K
∂x2(x, t) =
1
t√
4πtexp
(− x2
4t
)[ x2
4t− 1
2
]
liefert die Identitat (1.72). Die Substitution
y =σ√4t, dy =
1√4tdσ (1.74)
liefert (1.73):Z ∞
−∞K(ξ, t) dξ =
1√π
Z ∞
−∞exp (–y2 ) dy = 1 fur t > 0.
Dies komplettiert den Beweis.

22 Kapitel 1 Transport und Diffusion
Theorem 1.19 Fur eine beschrankte stetige Funktion u0 : R → R ist die in (1.71) betrachtete Funktion
eine Losung des Anfangs-Randwertproblems (1.69). Es gilt
limt↓0
u(x, t) = u0(x) fur x ∈ R.
BEWEIS. Fur den Beweis fixieren wir bis auf Weiteres x ∈ R und t > 0. Eine Vertauschung von Integration
und Differentiation in der Darstellung (1.71) liefert unter Anwendung von (1.72)
∂2u
∂x2(x, t) − ∂u
∂t(x, t) =
Z ∞
−∞
[ ∂2K
∂x2(x− ξ, t) − ∂K
∂t
]u0(ξ ) dξ = 0.
Fur die Uberprufung der Anfangsbedingung betrachten wir fur fest gewahltes x ∈ R die Differenz
u(x, t) − u0(x) =Z ∞
−∞K(x− ξ, t)[u0(ξ ) − u0(x) ] dξ.
wobei die Identitat (1.73) eingeht. Eine Substitution von der Form (1.74) ergibt fur jedes δ > 0
1√4πt
Z
|σ |≥δexp
(–σ2
4t
)dσ =
2√π
Z ∞
δ/√
4texp (–y2 )dy → 0 fur t→ 0.
Daraus ergibt sich∣∣∣
Z
|x−ξ |≥δK(x− ξ, t)[u0(ξ ) − u0(x) ] dξ
∣∣∣ ≤ 2max
y∈R
|u0(y )|Z
|x−ξ |≥δK(x− ξ, t) dξ → 0 fur t→ 0.
Außerdem giltZ
|x−ξ |<δK(x− ξ, t)|u0(ξ ) − u0(x)| dξ ≤ max
ξ:|x−ξ |<δ|u0(ξ ) − u0(x)| → 0 fur δ → 0,
wobei noch die Identitat (1.73) eingeht. Dies komplettiert den Beweis.
Bemerkung 1.20 (a) Die Darstellung (1.71) zeigt, dass die Losung u(x, t) des Anfangsrandwertproblems
(1.69). zu jeder beliebig kleinen Zeit t > 0 und in jedem Punkt x ∈ R von allen Anfangsdaten u0(ξ ) fur
ξ ∈ R abhangen.
(b) Dem Beweis von Theorem 1.19 entnimmt man, dass die Losung u des Anfangs-Randwertproblems
(1.69) auf der Menge R × t > 0 unendlich oft partiell differenzierbar ist.
(c) Die raumlich unbeschrankte Diffusionsgleichung ist nicht eindeutig losbar; ein entsprechendes Beispiel
wird in Kapitel 4 vorgestellt. Es lasst sich lediglich zeigen, dass es in gewissen Funktionsklassen hochstens
eine Losung existiert. M
1.10 Erhaltungsprinzipien
1.10.1 Nichnegativitat
Theorem 1.21 Sei u : G → R eine stetige Funktion, die auf G ∪ D1 der homogenenen Warmeleitungsglei-
chung (1.67) genugt, wobei die Bezeichnungen (1.64) (1.66) verwendet werden. Es gelte u ≥ 0 auf dem
Teilstuck D2 des Randes ∂G. Dann gilt u ≥ 0 auf G.
BEWEIS. Das Maximum Minimum Prinzip liefert
u(x, t) ≥ min(ξ,τ )∈D2
u(ξ, τ ) ≥ 0 fur (x, t) ∈ G.

Abschnitt 1.11 Black– Scholes– Gleichung 23
1.10.2 Massenerhaltung
Theorem 1.22 Es sei u : [0, L] × R+ → R eine hinreichend glatte Funktion, die die Diffusionsgleichung
∂u
∂t(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ [0, L], t ≥ 0
erfullt und außerdem den Neumann Randbedingungen∂u
∂x(0, t) =
∂u
∂x(L, t) fur t ≥ 0
genugt. Dann ist das Integral der Funktion u(·, t) unabhangig von der Zeit t, das heißt,Z L
0u(x, t) dx =
Z L
0u(x, 0) dx fur t ≥ 0.
BEWEIS. Integration von u bezuglich x und anschließende Differenziation bezuglich t ergibt
∂∂t
Z L
0u(x, t) dx =
Z L
0
∂u
∂t(x, t) dx = c2
Z L
0
∂2u
∂x2(x, t) dx = c2
∂u
∂x(x, t)
∣∣∣
x=L
x=0= 0
fur t ≥ 0.
1.11 Black–Scholes–Gleichung
1.11.1 Problemstellung
Portfolios sind Waren-, Devisen- oder Aktienpakete. Solche Portfolios unterliegen Preisschwankungen. Zur
Absicherung vor solchen Preisschwankungen (die auch durch Wahrungsschwankungen oder unvorherseh-
barer Naturkatastophen verursacht sein konnen) existieren Kauf- und Verkaufsoptionen. Solche Optionen
berechtigen den Eigentumer der Option, das zu Grunde liegende Portfolio zu einem bestimmten Falligkeit-
stermin T zu einem festgelegten Preis p∗ zu erwerben beziehungsweise zu verkaufen.
Solche Kauf- und Verkaufsoptionen werden an der Borse gehandelt und unterliegen selbst gewissen Preis-
schwankungen, die im Folgenden mathematisch modelliert werden. Dabei werden die Betrachtungen auf
europaische Kaufoptionen beschrankt. Der Wert c = c(p, τ ) einer solchen Option hangt von der Zeit
0 ≤ τ ≤ T sowie vom jeweils aktuellen Wert p des Assets ab. In einer deterministischen Variante lasst
sich der Wert einer solchen Option als Losung des folgenden Endwertproblems beschreiben:
−∂c
∂τ=
σ(p, τ )2
2p2 ∂2 c
∂p2 + rp∂c
∂p− rc fur p > 0, 0 ≤ τ ≤ T,
c(p, T ) = max p− p∗, 0 fur p ≥ 0.
(1.75)
Hierbei ist σ(p, τ ) ein Koeffizient, der als Volatilitat bezeichnet wird. Schließlich bezeichnet r ≥ 0 den
Zinssatz, der hier als konstant angenommen wird.
Es wird nun die in (1.75) betrachtete Endbedingung erlautert.
• Ist zur Zeit τ = T der tatsachliche Wert des Assets p kleiner oder gleich dem Preis p∗, zu dem das Asset
mit der Kaufoption erworben werden kann, so ist die Anwendung der Kaufoption sinnlos und diese damit
wertlos, c(p, T ) = 0 fur p ≤ p∗.

24 Kapitel 1 Transport und Diffusion
• Es wird nun angenommen, dass zur Zeit τ = T der tatsachliche Wert des Assets p großer als der Preis
p∗ ist, zu dem das Asset mit der Kaufoption erworben werden kann. In dieser Situation ist folgende
Vorgehensweise denkbar.
(i) Man erwirbt eine Kaufoption zum Preis c(p, T ).
(ii) Anschließend erwirbt man mit dieser Kaufoption das Asset zum Preis p∗.
(iii) Danach verkauft man das Asset zu dem gerade aktuellen Marktpreis p.
Da ein Handel mit Optionsscheinen zur Zeit τ = T weder Verlust noch Gewinn erwirtschaften darf, ist
die Forderung −c(p, T ) − p∗ + p = 0 sinnvoll, also c(p, T ) = p− p∗ fur p ≤ p∗.
Bemerkung 1.23 Es gibt weitere sinnvolle Forderungen, so zum Beispiel
c(0, τ ) = 0 fur τ ≥ 0.
Jede zu einem Zeitpunkt vollig wertlose Portfolio wird auch danach wertlos bleiben, so dass die Anwendung
der Kaufoption sinnlos und diese damit wertlos ist. Ist dagegen zu einem Zeitpunkt τ der Wert des Portfolios
sehr viel großer als p∗, so wird er sicherlich auch zum Falligkeitszeitpunkt noch großer als p∗ seine und die
Option wird daher sicher ausgefuhrt. Berucksichtigt man man noch die Verzinsung, so ist der Wert Option
dann
c(p, τ ) ≈ p− p∗e−r(T−τ ) fur τ ≥ 0.
M
1.11.2 Zeitliche Transformation der Differenzialgleichung
Im Folgenden wird die Black Scholes Gleichung (1.75) in ein Anfangswertproblem fur eine raumlich
unbeschrankte Drift Diffusionsgleichung transformiert. Hierzu wird zunachst das Endwertproblem durch
die Transformation
τ = T − t
in ein Anfangswertproblem umgewandelt,
∂c
∂t=
σ(p, t)2
2p2 ∂2 c
∂p2 + rp∂c
∂p− rc fur p > 0, 0 ≤ t ≤ T,
c(p, 0) = max p− p∗, 0 (1.76)
Hierbei werden die gleichen Notationen wie in (1.75) verwendet, so dass c(p, t) und σ(p, t) in (1.76) mit
c(p, τ ) beziehungsweise σ(p, τ ) in (1.75) ubereinstimmen. Die transformierte Zeitvariable t = T − τ be-
schreibt also die Restlaufzeit bis zur Falligkeit der Option.
1.11.3 Raumliche Transformation der Differenzialgleichung
Zur Transformation in ein Anfangswertproblem fur eine raumlich unbeschrankte partielle Differenzialglei-
chung wird nun die Substitution
x = ln p
durchgefuhrt. Dies fuhrt mit den Setzungen

Abschnitt 1.11 Black– Scholes– Gleichung 25
w(x, t) = c(p, t), %(x, t) = σ(p, t)
auf das Anfangswertproblem
∂w
∂t=
%(x, t)2
2∂2w
∂x2 + (r − %(x, t)2
2)∂w
∂x− rw fur x ∈ R, 0 ≤ t ≤ T, (1.77)
w(x, 0) = max ex − p∗, 0 .
Hierbei gehen noch die Identitaten
∂c
∂p(p, t) =
1p
∂w
∂x(x, t),
∂2c
∂p2(p, t) = − 1
p2
∂w
∂x(x, t) +
1
p2
∂2w
∂x2(x, t)
ein.
1.11.4 Elimination des ableitungsfreien Anteils
Abschließend fuhrt man zur vereinfachten Gewinnung einer Losung der transformierten Differenzialglei-
chung (1.77) noch die Transformation
u(x, t) = ertw(x, t) fur x ∈ R, 0 ≤ t ≤ T
durch und erhalt fur die gesuchte Funktion u das Anfangswertproblem
∂u
∂t=
%(x, t)2
2∂2u
∂x2 + (r − %(x, t)2
2)∂u
∂xfur x ∈ R, 0 ≤ t ≤ T,
u(x, 0) = max ex − p∗, 0 ,(1.78)
wobei noch die Identitaten
∂u
∂t= rertw + ert ∂w
∂t,
∂ku
∂xk= ert ∂kw
∂xkfur k = 0, 1
eingehen.
1.11.5 Konstruktion der Losung f ur preisunabhangige Volatilitaten
Wir betrachten nun die transformierte Black Scholes Gleichung (1.78) fur preisunabhangige Volatilitaten.
In einer allgemeinen Notation liegt also die folgende Situation vor:
∂u
∂t(x, t) = a(t)
∂2u
∂x2(x, t) + b(t)
∂u
∂x(x, t) fur x ∈ R, t > 0,
u(x, 0) = u0(x) fur x ∈ R
(1.79)
mit stetigen Funktionen
a, b : R → R, a(t) ≥ a0 > 0 fur x ∈ R.
Man nennt (1.79) eine Drift Diffusionsgleichung, mit a als Diffusions- und b als Driftkoeffizienten.

26 Kapitel 1 Transport und Diffusion
Fur die Darstellung der Losung des vorgegebenen Problems (1.79) betrachten wir die Funktion
K(x, t) :=1√4π
1√A(t)
exp(
− (x + B(t))2
4A(t)
)
fur x ∈ R, t > 0, (1.80)
mit A, B ∈ C1(R ), A ′ = a, B ′ = b.
Zum Beispiel kann man also
A(t) =Z t
0a(τ ) dτ, B(t) =
Z t
0b(τ ) dτ fur t ≥ 0
wahlen. Im Fall konstanter Koeffizienten a(t) ≡ a und b(t) ≡ b fuhrt dies auf A(t) = at beziehungsweise
B(t) = bt.
Lemma 1.24 Die Funktion K aus (1.80) erfullt
∂K
∂t(x, t) = a(t)
∂2K
∂x2(x, t) + b(t)
∂K
∂x(x, t) fur x ∈ R, t > 0, (1.81)
Z ∞
−∞K(x, t) dx = 1 fur t > 0.
BEWEIS. Mit der Notation
∼∼∼∼ = − (x + B(t))2
4A(t)
berechnet man leicht Folgendes:
√4π
∂K
∂t(x, t)
= −12
1
A(t)3/2a(t) exp
(
∼∼∼∼)
− 1√A(t)
exp(
∼∼∼∼)
14
2(x + B(t))b(t)A(t) − (x + B(t))2a(t)
A2(t)
= −12
1
A(t)5/2exp
(
∼∼∼∼)
a(t)A(t) + (x+B(t))b(t)A(t) − 12(x+B(t))2a(t)
.
Außerdem erhalt man
√4π
∂K
∂x(x, t) = − 1√
A(t)exp
(
∼∼∼∼)
x + B(t)
2A(t),
√4π
∂2K
∂x2(x, t) = − 1
2A(t)3/2exp
(
∼∼∼∼)
–(x + B(t) )2
2A(t)+ 1
=1
2A(t)5/2exp
(
∼∼∼∼)
(x + B(t) )2
2− A(t)
.
Daraus erhalt man unmittelbar die Darstellung (1.81).
Fur die Darstellung der Losung des vorgegebenen Problems (1.79) fur die Drift Diffusionsgleichung be-
trachten wir die Funktion
u(x, t) =Z ∞
−∞K(x− ξ, t)u0(ξ ) dξ fur x ∈ R, t > 0, (1.82)
mit der Kernfunktion K(x, t) aus (1.80).

Abschnitt 1.11 Black– Scholes– Gleichung 27
Theorem 1.25 Es sei u0 : R → R eine stetige Funktion mit der Eigenschaft
|u0(x)| ≤ αeβx2fur x ∈ R
mit Konstanten α, β ∈ R, α ≥ 0. Dann ist die in (1.82) betrachtete Funktion eine Losung des Anfangs-
Randwertproblems (1.79) fur die Drift Diffusionsgleichung. Es gilt
limt↓0
u(x, t) = u0(x) fur x ∈ R.
BEWEIS. Ahnlich wie fur die raumlich unbeschrankte Diffusionsgleichung.
Wir betrachten die Funktion
N (x) =1√2π
Z x
−∞e−y2/2 dy fur x ∈ R. (1.83)
Die Funktion N : R → R ist die Verteilungsfunktion der Standardnormalverteilung. Es gilt
limx→−∞
N (x) = 0, limx→∞
N (x) = 1, N ist monoton wachsend.
Theorem 1.26 Fur eine konstante Volatilitat σ ist
c(p, t) = pN (d1 ) − p∗e−rtN (d2 ) (1.84)
mit d1/2 =ln (p/p∗ ) + (r ± σ2/2)t
σ√
t,
eine Losung des Anfangswertproblems (1.76) fur die Black Scholes Gleichung, wobei die Funktion N wie
in (1.83) gegeben ist.
BEWEIS. Mit den Notation aus (1.78) erhalt man aus Theorem 1.25 zunachst Folgendes:
u(x, t) =1
σ√
2πt
Z ∞
−∞max ey − p∗, 0 exp
(
− (x + (r − σ2/2)t − y )2
2σ2t
)
dy
=1
σ√
2πt
Z ∞
ln p∗
(ey − p∗ ) exp(
− (x + (r − σ2/2)t − y )2
2σ2t
)
dy
=1√2π
(Σ1 − Σ2 ) fur x ∈ R, t > 0,
mit
Σ1 =1
σ√
t
Z ∞
lnp∗
ey exp(
–(x + (r − σ2/2)t − y )2
2σ2t
)
dy,
Σ2 =p∗
σ√
t
Z ∞
lnp∗
exp(
–(x + (r − σ2/2)t − y )2
2σ2t
)
dy.
Man berechnet nun zunachst allgemein fur Zahlen γ > 0 und a, µ ∈ R Folgendes:
1γ
Z ∞
aey exp
(
–(y − µ)2
2γ2
)
dy(∗)=
1γ
Z ∞
aexp
(
–(y − (µ + γ2 ))2 − (2µγ2 + γ4 )
2γ2
)
dy
=1γ
exp(µ+ γ2/2)Z ∞
aexp
(
–(y − (µ + γ2 ))2
2γ2
)
dy
(∗∗)= exp (µ+ γ2/2)
Z
µ+γ2−aγ
−∞exp ( − z2/2) dz
= exp(µ+ γ2/2)N(
µ + γ2 − aγ
)
. (1.85)

28 Kapitel 1 Transport und Diffusion
Hierbei ergibt sich (∗) aus einer quadratischen Erganzung, und (∗∗) resultiert aus einer Substitution
z = −y − (µ + γ2 )
γ, γdz = −dy. (1.86)
Eine Anwendung von (1.85) mit den Setzungen
µ =
= x︷︸︸︷
ln p + (r − σ2/2)t, γ = σ√t, a = ln p∗ (1.87)
ergibt dann12π
Σ1 = pertN (d1 ).
Zur weitereren Bearbeitung von Σ2 berechnet man wie im (1.85) mit Zahlen γ > 0 und a, µ ∈ R Folgendes:
1γ
Z ∞
aexp
(
–(y − µ)2
2γ2
)
dy(∗)=
Z
µ−aγ
−∞exp(−z2/2) dz = N
(µ − a
γ
)
,
wobei die Identitat (∗) mit der gleichen Substitution wie in (1.86) folgt. Mit den gleichen Setzungen wie in
(1.87) erhalt man daraus
Σ2 = p∗N (d2 ).
Die Rucktransformation
c(p, t) = e−rtu(x, t), x = ln p
liefert dann die Darstellung (1.84). Dies komplettiert den Beweis.
Bemerkung 1.27 Die Darstellung (1.84) kann man folgendermaßen interpretieren:
• Man kann zeigen, dass N (d2 ) die Wahrscheinlichkeit dafur ist, dass zum Falligkeitstermin t = 0 der
Wert p des Assets den Wert p∗ ubersteigt. Dann wird man die Kaufoption umsetzen, es entstehen also
die wahrscheinlichen Kosten p∗N (d2 ).
• Dagegen beschreibt pertN (d1 ) den wahrscheinlich enstehenden Gewinn.
• Der zu erwartende Wert der Kaufoption zum Falligkeitstermin ist damit pertN (d1 )− p∗N (d2 ), und eine
Abzinsung liefert dann die Darstellung (1.84).
M
Bemerkung 1.28 Aus Theorem 1.26 lassen sich unmittelbar einige Eigenschaften des Wertes der Kaufop-
tion herleiten.
(a) Fur feste Werte von p und t ist die Funktion c(p, t) streng monoton fallend bezuglich σ, mit
∂c
∂σ= − p
√t√
2πe−d2
1/2 < 0. (1.88)
limσ→0+
c(p, t) = maxp− p∗e−rt, 0, lim
σ→∞c(p, t) = p.
(b) Es gilt
max p− p∗e−rt, 0 ≤ c(p, t) ≤ p fur p ≥ 0, t ≥ 0.

Ubungsaufgaben 29
(c) Fur feste Werte von p und t ist der Wert der Kaufoption monoton fallend bezuglich p∗, das heißt,∂c
∂p(p, t) = −e−rtN (d2 ) < 0.
Beweis als Ubungsaufgabe. M
Bemerkung 1.29 Theorem 1.26 gilt auch fur preisunabhangige Volatilitaten und Zinsen. Die Darstellung
in Theorem 1.26 gilt dann mit den folgenden Modifikationen:
r ersetze durch 1t
Z t
0r(s) ds,
σ2....................
1t
Z t
0σ2(s) ds.
M
1.11.6 Implizierte Volatilitaten
In der Praxis sind Volatilitaten nicht bekannt. Zur Erstellung eines mathematischen Modells bestimmt man
diese naherungsweise auf der Basis von bekannten Optionspreisen. Man spricht hierbei von implizitenVolatilitaten.
Dies fuhrt auf eine nichtlineare Gleichung
f (σ ) := c(p, t) = c∗ (1.89)
mit einem gegebenen Preis c∗ und der Funktion c(p, t) aus (1.84). Die Gleichung (1.89) lasst sich bei-
spielsweise mit dem eindimensionalen Newton Verfahren losen. Dabei bewirkt die Eigenschaft (1.88) eine
Monotonie der Iterierten.
1.11.7 Weitere Themen
Weitere mogliche Themen sind
• die Berucksichtigung von Transaktionskosten
• Amerikanische Kauf- und Verkaufsoptionen, die schon vor dem Falligkeitstermin umgesetzt werden
konnen. Dies fuhrt auf freie Randwertprobleme fur die Black Scholes Gleichung.
Diese Themen werden hier aber nicht weiter behandelt.
Ubungsaufgaben
Aufgabe 1.1

30 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
2 Wellenausbreitung – Mathematische Modellierung undnumerische Losung
2.1 Mathematische Modellierung der Ausbreitung von Wellen
2.1.1 Die raumlich eindimensionale Ausbreitung von Wellen
Zunachst soll ein einfacher Schwinger betrachtet werden. Dieser besteht aus N −1 kleinen Massenpunkten,
die horizontal gleichmaßig uber das Intervall [0, L ] verteilt sind. Der Abstand zwischen je zwei benachbar-
ten Massenpunkten sei mit ..................................................................................... x = L/N bezeichnet. Jeder Massenpunkt ist mit seinen benachbarten Massen-
punkten durch Faden verbunden. Der Faden ist an den Intervallrandern x = 0 und x = L befestigt. Jeder
dieser Massenpunkte lasst sich in vertikaler Richtung auslenken. Fur das sich daraus ergebende vertikale
Schwingungsverhalten dieser Massenpunkte wird im Folgenden ein mathematisches Modell beschrieben.
Daraus erhalt man durch einen Grenzubergang N → ∞ ein mathematisches Modell fur die schwingende
Saite.
Im weiteren Verlauf bezeichne F die (von der Zeit und vom Ort unabhangige) Spannkraft des Fadens.
Weiter sei fur k = 1, 2, . . . , N − 1
xj = j ..................................................................................... x Position des j ten Massenpunkts in horizontaler Richtung
mj Masse ....................
yj(t) Auslenkung .................... aus der Ruhelage in vertikaler Richtung
zur Zeit t ∈ [0, T ].
Die vorliegende Situation ist in Abbildung 2.1 veranschaulicht.
....
.....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....................
................
y
................................................................................................................................................................................................................................................................................................................................................................................................................................................................. ..............................................................................................................................................................................................................................
...
xx0 = 0......................................................................................................................................................................................
....
.....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....•
y1(t)
m1
x1
.........................................................................................................................................................................................................
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
...•
y2(t)
m2
x2
.................................................................................................................................
....
.....
.....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
...•
y3(t)
m3
x3
· · ·
· · ·
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
...•
yN−1(t)
mN−1
xN−1
....................................................................................................................................................................
xN = L
....................................................................................................................................
................F
..............................................................................................................................................................
... F
Abbildung 2.1 Einfacher Schwinger zur Zeit t ∈ [0, T ]
Fur j = 1, 2, . . . , N − 1 wirken auf den vertikal ausgelenkten Massenpunkt an der Position xj zur Zeit t
die beiden rucktreibenden Krafte
−F yj(t) − yj−1(t)
..................................................................................... x
, Fyj+1(t) − yj(t)
..................................................................................... x
.

Abschnitt 2.1 Mathematische Modellierung der Ausbreitung von Wellen 31
Auf Grund der Randbefestigung des Fadens gilt dabei y0(t) = 0 beziehungsweise yN (t) = 0 fur t ∈ [0, T ].
Die Bewegungsgleichung fur die Massenpunkte lauten daher
mj yj(t) = −F yj(t) − yj−1(t)
..................................................................................... x
+ Fyj+1(t) − yj(t)
..................................................................................... x
fur j = 1, 2, . . . , N − 1,
y0(t) = yN (t) = 0.
(2.1)
Zusatzlich liegen noch die Anfangsbedingungen
yj(0) = y0,j yj(0) = y1,j fur j = 1, 2, . . . , N − 1, (2.2)
vor, die die zum Anfangszeitpunkt t = 0 vorliegende Auslenkung beziehungsweise Geschwindigkeit der
einzelnen Massenpunkte beschreiben. Hierbei handelt es such um ein Anfangs Randwertproblem fur ein
gekoppeltes System von N − 1 linearen gewohnlichen Differenzialgleichungen zweiter Ordnung.
Die schwingende Saite erhalt man nun als den Grenzfall ..................................................................................... x → 0. Mit den Notationen % fur die Dichte und
q fur den Querschnitt eines jeden Massenpunkts erhalt man mj = %q..................................................................................... x, und das System von Differenzial-
gleichungen (2.1) geht dann mit der Abkurzung P := F/q uber in
%yj(t) = Pyj+1(t) − 2yj(t) + yj−1(t)
(..................................................................................... x)
2 fur j = 1, 2, . . . , N − 1,
y0 = yN = 0.
(2.3)
Daraus erhalt man ein mathematisches Modell fur eine eingespannte schwingenden Saite, wobei die verti-
kale Auslenkung u(x, t) ∈ R zur Zeit t ∈ [0, T ] im Ort x ∈ [0, L ] aus der Ruhelage beschrieben werden
soll. Fur kleine Werte von ..................................................................................... x wird dieses annahernd durch (2.3) beschrieben mit den Approximationen
yj(t) ≈ u(xj , t) fur j = 0, 1, . . . , N.
Wegen
yj+1(t) − 2yj(t) + yj−1(t)
( ..................................................................................... x)2
≈ u(xj+1, t) − 2u(xj , t) + u(xj−1, t)
( ..................................................................................... x)2
≈ ∂2u
∂x2(xj , t)
yj(t) ≈ ∂2u
∂t2(xj , t) fur j = 1, 2, . . . , N − 1
erhalt man daher fur die zu bestimmende Auslenkung u(x, t) der schwingenden Saite die partielle Differen-
zialgleichung
%∂2u
∂t2(x, t) = P
∂2u
∂x2(x, t) fur (x, t) ∈ Q = (0, L) × (0, T ). (2.4)
Zusatzlich liegen noch die Anfangsbedingungen
u(x, 0) = u0(x)∂u
∂t(x, 0) = u1(x) fur x ∈ [0, L ] (2.5)
vor, die die zum Zeitpunkt t = 0 vorliegende Auslenkung beziehungsweise Geschwindigkeit der Saite
beschreiben. Ausserdem fuhrt die Einspannung der Saite am Rand auf die Randbedingungen
u(0, t) = 0, u(L, t) = 0 fur t ∈ [0, T ]. (2.6)
Die partielle Differenzialgleichung (2.4) wird als (raumlich eindimensionale) Schwingungsgleichung oder
auch als Wellengleichung bezeichnet. Hierbei handelt es sich um eine spezielle lineare partielle Differen-
zialgleichung zweiter Ordnung. Insgesamt stellt (2.4), (2.5), (2.6) ein Anfangs Randwertproblem fur die
Schwingungsgleichung dar. In Abbildung 2.2 ist die vorliegende Situation mit der Notation
c2 =P%
in der Orts Zeit Ebene dargestellt.

32 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
0 L0
T
..............................................................................................................................................
... x
.....
....
.....
....
.....
.....
....
.....
....
.....
....
....................
................
t
utt = c2uxx
u(x, 0) = u0(x)ut(x, 0) = u1(x)
u(0, t) = 0 u(L, t) = 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Abbildung 2.2: Darstellung des Anfangs-Randwertproblems fur die raumlich eindimensionale Wellenglei-
chung in der Orts-Zeit-Ebene
2.1.2 Die raumlich zweidimensionale Ausbreitung von Wellen
Das Schwingungsverhalten einer Membran wird durch die raumlich zweidimensionale Wellengleichung
∂2u
∂t2(x, y, t) = c2∆u(x, y, t) fur (x, y ) ∈ G, t ∈ (0, T ). (2.7)
beschrieben mit einem ebenen Gebiet G ⊂ R2. Hierbei bezeichnet G das Innere der Menge G, und ∆
bezeichnet den hier nur auf den Ortsvariablen wirkenden Laplace Operator
∆u(x, y, t) = (∂2u
∂x2 +∂2u
∂y2 )(x, y, t) fur (x, y ) ∈ G, t ∈ [0, T ]. (2.8)
Zusatzlich liegen noch die Anfangsbedingungen
u(x, y, 0) = u0(x, y )∂u
∂t(x, y, 0) = u1(x, y ) fur (x, y ) ∈ G (2.9)
vor, die die zum Zeitpunkt t = 0 vorliegende Auslenkung beziehungsweise Geschwindigkeit der Membran
beschreiben. Die Einspannung der Membran am Rand fuhrt auf die Randbedingungen
u(x, y, t) = 0 fur (x, y ) ∈ ∂G, t ∈ [0, T ]. (2.10)
2.1.3 Die raumlich dreidimensionale Ausbreitung von Wellen
Die mathematische Modell der Schallausbreitung im Raum oder einer elektromagnetische Schwingung wird
durch die raumlich dreidimensionale Wellengleichung beschrieben. Diese ist von der Form
∂2u
∂t2(x, y, z, t) = c2∆u(x, y, z, t) fur (x, y, z ) ∈ G, t ∈ (0, T ), (2.11)
wobei der Laplace Operator die Form
∆u(x, y, z, t) =( ∂2u
∂x2 +∂2u
∂y2 +∂2u
∂z2
)(x, y, z, t) fur (x, y, z ) ∈ G, t ∈ [0, T ] (2.12)
hat.

Abschnitt 2.2 Die r aumlich eindimensionale, unbeschr ankte Schwingungsgleichung 33
2.1.4 Nichtlineare Schwingungsgleichungen
Nichtlineare Wellengleichungen treten beispielsweise auf bei der mathematischen Modellierung von schwin-
genden Saiten oder Membranen mit großeren Auslenkungen aus der Ruhelage. Die Schwingungsgleichung
fur die Saite nimmt in dieser Situation die folgende Form an:
∂2u
∂t2(x, t) = c2
∂2u
∂x2(x, t)
[1 +∂u
∂x(x, t)2 ]3/2
fur (x, t) ∈ Q = (0, L) × (0, T ).
2.2 Die raumlich eindimensionale, unbeschrankte Schwingungsgleichung
Im Folgenden wird der Einfachheit halber das Schwingungsverhalten einer in beiden Richtungen unendli-
chen Saite betrachtet. In dieser Situation nimmt die zugehorige Schwingungsgleichung die Form (vergleiche
(2.4))
∂2u
∂t2(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ R, t > 0 (2.13)
an. Die zugehorigen Anfangsbedingungen lauten hier
u(x, 0) = u0(x),∂u
∂t(x, 0) = u1(x) fur x ∈ R. (2.14)
Das nachfolgende Theorem liefert eine Klasse von Losungen fur die Schwingungsgleichung (2.13), die als
d’Alembertsche Losungen bezeichnet werden.
Theorem 2.1 Fur beliebige gewahlte zweimal stetig differenzierbare Funktionen f : R → R und g : R →R stellt die Funktion
u(x, t) = f (x− ct) + g(x+ ct) fur x ∈ R, t > 0 (2.15)
eine Losung der raumlich eindimensionalen Schwingungsgleichung (2.13) dar. Die Funktion (2.15) erfullt
die Anfangsbedingungen (2.14) mit der speziellen Wahl
f (x) =12u0(x) − 1
2c
Z x
0u1(z ) dz fur x ∈ R,
g(x) =12u0(x) +
12c
Z x
0u1(z ) dz ..........
..........
(2.16)
BEWEIS. Die Aussage (2.15) erhalt man unmittelbar aus der Anwendung der Kettenregel:
∂2u
∂t2(x, t) = c2f ′′(x− ct) + c2g ′′(x+ ct) = c2
∂2u
∂x2(x, t) fur x ∈ R.
Fur den Nachweis der Aussage (2.16) uber die richtige Anpassung an die Anfangsbedingungen betrachtet
man zunachst die d’Alembertsche Losung (2.15) und erhalt
f (x) + g(x) = u0(x), c[−f ′(x) + g ′(x) ] = u1(x) fur x ∈ R. (2.17)
Eine Integration der zweiten Identitat in (2.17) liefert
c[−f (x) + g(x) ] =Z x
0u1(z ) dz + K fur x ∈ R (2.18)
mit einer reellen Konstanten K , und ein anschließendes Auflosen in der ersten Gleichung (2.17) und in
(2.18) nach den beiden Unbekannten f (x) und g(x) liefert mit der Setzung K = 0 die Aussage (2.16). Dies
komplettiert den Beweis.

34 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
Korollar 2.2 Unter den Bedingungen von Theorem 2.1 lasst sich die Losung des Anfangswertproblems
(2.14) fur die raumlich eindimensionale, unbeschrankte Schwingungsgleichung (2.14) in der kompakten
Form
u(x, t) =u0(x− ct) + u0(x+ ct)
2+
12c
Z x+ct
x−ctu1(z ) dz fur x ∈ R, t > 0 (2.19)
schreiben.
Es sollen nun noch einige Sachverhalte veranschaulicht werden.
x∗ − ct∗ x∗ x∗ + ct∗.........................................................................
................ x
.....
....
.....
....
.....
....
.....
.....
....
.....
....
....................
................
t
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
(x∗, t∗ )
x−ct≡x ∗
−ct∗ x
+ct ≡
x∗ +ct∗
Abbildung 2.3: 1D Wellengleichung– Derjenige Bereich aus der Zeitschicht t = 0 mit Auswirkungen auf
den Wert von u(x∗, t∗) ist hervorgehoben
x∗ − ct∗ x∗ x∗ + ct∗
t∗
......................................................................................
... x
.....
.....
....
.....
.....
....
.....
....
.....
....
.....
...................
................
t
.................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
x+ct ≡
x∗
x−ct≡x ∗
Abbildung 2.4: 1D Wellengleichung in der (x, t)-Ebene. Der vom dem Wert u(x∗, 0) beeinflusste Bereich
ist schraffiert dargestellt.

Abschnitt 2.3 Die Fouriersche Methode 35
2.3 Die Fouriersche Methode
Im Folgenden wird das Anfangs Randwertproblem fur die Schwingungsgleichung (2.4) (2.6) betrachtet.
Es liegt somit das folgende Anfangs Randwertproblem vor:
utt(x, t) = c2uxx(x, t) fur (x, t) ∈ (0, L) × (0, T )
u(0, t) = u(L, t) = 0 fur t ∈ [0, T ]
u(x, 0) = u0(x) fur x ∈ [0, L ]
ut(x, 0) = u1(x) ....................
(2.20)
Die Nullrandbedingungen ermoglichen die Verwendung des Ansatzes der Trennung der Veranderlichen, der
bereits bei der Diffusionsgleichung verwendet worden ist und im Folgenden an die vorliegende Situation
angepasst werden soll. Es wird der Ansatz
u(x, t) = X(x)S(t) fur (x, t) ∈ [0, L ] × [0, T ] (2.21)
herangezogen zur Gewinnung von allgemeinen Losungen der Schwingungsgleichung, Rand- und Anfangs-
bedingungen spielen also zunachst kein Rolle. Einzelheiten hierzu werden im nachfolgenden Abschnitt
2.3.1 vorgestellt. In Abschnitt 2.3.2 werden dann die vorgegebenen Randbedingungen berucksichtigt, und
in Abschnitt 2.3.3 wird eine Superposition der gewonnen Losungen unter Anpassung der auftretenden Ko-
effizienten vorgenommen. Dies liefert schließlich die Losung des Anfangs Randwertproblems (2.20).
2.3.1 Trennung der Veranderlichen
Als Erstes werden Bedingungen an die Funktionen X : [0, L ] → R und S : [0, T ] → R hergeleitet, so
dass die zugehorige Funktion u aus (2.21) die Schwingungsgleichung utt(x, t) = c2uxx(x, t) fur (x, t) ∈Q = (0, L) × (0, T ) lost, Nullrand- und Anfangsbedingungen spielen also zunachst kein Rolle. Hierzu
berechnet man ausgehend von dem Ansatz (2.21) zunachst
utt(x, t) = X(x)S ′′(t), uxx(x, t) = X ′′(x)S(t) fur (x, t) ∈ (0, L) × (0, T ),
so dass fur die Erfullung der Schwingungsgleichung notwendigerweise
c2X ′′(x)
X(x)=
S ′′(t)
S(t)fur (x, t) ∈ (0, L) × (0, T ) (2.22)
gelten muss. Fur den Moment sei hierbei X (x) 6= 0 und S(t) 6= 0 fur alle (x, t) ∈ (0, L) × (0, T )
angenommen sei, wobei man diese Restriktion spater auch wieder fallen lassen kann. Es verhalt sich nun
so, dass die linke Seite der Identitat (2.22) lediglich von der Ortsvariablen x und nicht von der Zeitvariablen
t abhangt, und bei der rechten Seite verhalt es sich genau umgekehrt. Dies bedeutet aber, dass beide Seiten
der Identitat (2.22) notwendigerweise konstant sein mussen, es gilt also
c2X ′′(x)
X(x)=
S ′′(t)
S(t)= −s2 fur (x, t) ∈ (0, L) × (0, T ) (2.23)
mit einer noch zu spezifizierenden reellen Konstanten s2 > 0. Denkbar ware hier auch die Zulassung negati-
ver Konstanten s bei gleichzeitigem Verzicht der Quadratbildung. Im Zuge der weiteren Berechnungen stellt
sich jedoch heraus, dass sich damit die Randbedingungen nicht erfullen lassen. Daher kann man sich auch

36 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
gleich auf positive Konstanten s2 beschranken, wobei sich durch die Verwendung von s2 > 0 anstelle von
s > 0 die Notation vereinfachen wird. Die Darstellung (2.23) fuhrt unmittelbar auf die beiden Gleichungen
X ′′(x) +( s
c
)2X(x) = 0 fur x ∈ (0, L), (2.24)
S ′′(t) + s2S(t) = 0 fur t ∈ (0, T ). (2.25)
Bemerkung 2.3 Bei der Gleichung (2.24) handelt es sich um lineare gewohnliche Differenzialgleichungen
zweiter Ordnung mit konstanten Koeffizienten fur die gesuchten Funktion X : [0, L ] → R. Erlauterungen
zu diesen Bezeichnungen sind in Bemerkung 1.3 auf Seite 1.3.1 vorgestellt worden. M
Losungen der gewohnlichen Differenzialgleichung (2.24) gewinnt man durch einen Exponentialansatz
X(x) = eλx fur x ∈ (0, L) (2.26)
mit einem zu bestimmenden Koeffizienten λ ∈ C. Zweimalige Differentiation in (2.26) liefert
X ′′(x) = λ2 eλx fur x ∈ (0, L),
und die gewohnliche Differenzialgleichung (2.24) fur die gesuchte Funktion X geht dann uber in[λ2 +
( sc
)2 ]eλx fur x ∈ (0, L). (2.27)
Division in (2.27) durch den in jedem Fall von Null verschiedenen Wert eλx fuhrt auf die Bestimmungsglei-
chung λ2 = −(s/c)2, die eine Losung
λ = λs = isc
besitzt. Naturlich existiert noch eine zweite Losung λ = −is/c, die letztlich jedoch auf keine weiteren reell-
wertigen Losungen der betrachteten gewohnliche Differenzialgleichung (2.24) fuhrt. Der Exponentialansatz
(2.26) liefert also zu der gewohnlichen Differenzialgleichung (2.24) die komplexwertige Losung
Xs(x) = ei(s/c)x fur x ∈ (0, L).
Gesucht sind jedoch reellwertige Losungen der gewohnlichen Differenzialgleichung (2.24). Diese erhalt
man durch Heranziehung des Real und des Imaginarteils der Funktion Xs
Re Xs(x) = cos( (s/c)x), Im Xs(x) = sin( (s/c)x) fur x ∈ [0, L ].
Diese Vorgehensweise ist allerdings nur deshalb zulassig, weil die in (2.24) auftretenden Koeffizienten reell
sind.
Genauso gewinnt man eine komplexwertige Losung der gewohnlichen Differenzialgleichung (2.25)
Ss(t) = eist fur t ∈ (0, T ).
beziehungsweise durch Heranziehung des Real und des Imaginarteils der Funktion Ss die beiden reellwer-
tigen Losungen
Re Ss(t) = cos (st), Im Ss(t) = sin (st) fur t ∈ [0, T ].
fur die gesuchte Funktion S. Die so gewonnenen Losungen der Schwingungsgleichung haben also die Form
Re Xs(x)Re Ss(t) = cos( (s/c)x) cos (st) fur (x, t) ∈ Q := [0, L ] × [0, T ]
Re Xs(x)Im Ss(t) = cos( (s/c)x) sin (st) ....................
Im Xs(x)Re Ss(t) = sin( (s/c)x) cos (st) ....................
Im Xs(x)Im Ss(t) = sin( (s/c)x) sin (st) ....................

Abschnitt 2.3 Die Fouriersche Methode 37
2.3.2 Anpassung an die Randbedingungen
In diesem Abschnitt werden diejenigen Werte von s bestimmt, fur die Nullrandbedingungen aus (2.20)
erfullt sind. Wegen Re Ss(t) 6= 0 und Im Ss(t) 6= 0 fur fast alle t ∈ [0, T ] ist klar, dass man die Betrach-
tungen auf die Funktion Xs beschranken kann. Dabei kommt wegen Re Xs(0) = cos 0 = 1 6= 0 nur der
Imaginaranteil Im Xs in Frage. Hier ist in x = 0 die Randbedingung stets erfullt,
Im Xs(0) = sin 0 = 0.
In x = L fuhrt die Randbedingung auf
Im Xs(L) = sin( (s/c)L) = 0,
was fur sL/c ∈ π, 2π, 3π, . . . erfullt ist. Letzteres umformuliert bedeutet
s ∈ k cπL
: k = 1, 2, . . .. (2.28)
Somit stellen die Funktionen
vk(x, t) := sin(k
πLx)
cos(k
πcLt), wk(x, t) := sin
(k
πLx)
sin(k
πcLt)
fur (x, t) ∈ [0, L ] × [0, T ], k = 1, 2, . . .
(2.29)
jeweils Losungen der Schwingungsgleichungen dar, die zudem alle die Nullrandbedingungen aus (2.20)
erfullen.
2.3.3 Superposition – Anpassung an die Anfangsbedingung
Auf Grund der Linearitat der vorliegenden Differenzialgleichung und der auftretenden Nullrandbedingun-
gen sind endliche Linearkombinationen der Funktionen vk und wk fur k = 1, 2, . . . ebenfalls Losungen der
betrachteten Differenzialgleichung, die zugleich wie gefordert an den beiden Randern verschwinden. Es ist
naheliegend, auch Funktionen von der Form
u(x, t) =∞
X
k=1
[ckvk(x, t) + dkwk(x, t)
](2.30)
=∞
X
k=1
sin(k
πLx)[ck cos
(k
πcLt)
+ dk sin(k
πcLt)]
fur (x, t) ∈ [0, L ] × [0, T ]
zu betrachten mit den bezuglich der Variablen x 2L-periodischen Funktionen vk und wk aus (2.29). Dabei
soll ohne weitere Hinterfragung eine hinreichend gute Konvergenz der auftretenden Reihe sowie hinreichend
gute Differenzierbarkeitseigenschaften der Grenzfunktion u angenommen werden. Formal erhalt man
u(x, 0) =∞
X
k=1
[ck vk(x, 0) + dkwk(x, 0) ] =∞
X
k=1
ck sin(k
πLx) !
= u0(x)
fur x ∈ [0, L ].
(2.31)
Zur Anpassung an die Anfangsbedingungen ist in (2.31) nach einer Fourierentwicklung
u0(x) =∞
X
k=1
ck sin(k
πLx)
+∞
X
j=0
fj cos(j
πLx)
fur x ∈ [0, L ] (2.32)

38 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
der gegebenen Funktion u : [0, L ] → R zu suchen, in der alle Kosinus-Anteile wegfallen beziehungswei-
se die Koeffizienten fj fur j = 0, 1, . . . allesamt verschwinden. Dies wird erreicht durch eine ungerade
Fortsetzung der Funktion u0 auf das Intervall [−L, 0],
u0( − x) := −u0(x) fur x ∈ [−L, 0].
Eine Fourierentwicklung der entstehenden ungeraden Funktion u0 : [−L,L ] → R liefert tatsachlich (2.32)
mit den Fourierkoeffizienten
ck =1L
Z L
−Lu0(y ) sin
(k
πLy)dy =
2L
Z L
0u0(y ) sin
(k
πLy)dy fur k = 1, 2, . . . , (2.33)
fk =1L
Z L
−Lu0(y ) cos
(k
πLy)dy = 0 fur k = 0, 1, . . . .
Entsprechend erhalt man
ut(x, 0) =∞
X
k=1
[ck(vk )t(x, 0) + dk(wk )t(x, 0)
]
=∞
X
k=1
πLkdk sin
(k
πLx) !
= u1(x) fur x ∈ [0, L ].
(2.34)
Durch eine ungerade Fortsetzung der Funktion u1 auf das Intervall [−L, 0],
u1( − x) := −u1(x) fur x ∈ [−L, 0].
und eine Fourierentwicklung der entstehenden ungeraden Funktion u1 : [−L,L ] → R liefert (2.34) mit den
Fourierkoeffizienten
dk =2
cπk
Z L
0u1(y ) sin
(k
πLy)dy fur k = 1, 2, . . . . (2.35)
Eine Setzung (2.30) mit einer Wahl der Koeffizienten ck beziehungsweise dk gemaß (2.34) und (2.35) lie-
fert also schließlich die gesuchte Losung des Anfangs Randwertproblems (2.20) fur die Schwingungsglei-
chung.

Abschnitt 2.4 Mathematische Analysis zum Separationsansatz 39
2.4 Mathematische Analysis zum Separationsansatz
Fur die Funktionen u0 : [0, L ] → R und u1 : [0, L ] → R werden die folgenden Annahmen getroffen:
us ∈ C3( [0, L ] ), u(p)s (0) = u(p)
s (L) = 0 fur p = 0, 1, 2 (s = 0, 1). (2.36)
Theorem 2.4 Unter der Annahmen (2.36) an die Funktionen u0, u1 : [0, L ] → R konvergiert die Reihe
(2.31) mit den Notationen aus (2.29) und stellt eine auf [0, L] × R + zweimal stetig partiell differenzierbare
Losung des Anfangs Randwertproblems (2.20) dar.
BEWEIS. Man erhalt zunachst mit partieller Integration
ck = k−3gk mit gk = − 2L
(Lπ
)3 Z L
0u
(3)0 (y ) cos
(k
πLy)dy, (2.37)
dk = k−3hk mit hk = − 2L
(Lπ
)2 Z L
0u(3)
1 (y ) sin(k
πLy)dy, k = 1, 2, . . . .(2.38)
Die detaillierte Rechnung fur die Darstellung (2.37) von ck sieht so aus:
L2ck = − L
kπ
= 0︷ ︸︸ ︷
u0(y ) cos(k
πLy)∣∣∣
L
0+
Lkπ
Z L
0u ′
0(y ) cos(k
πLy)dy
= −(
Lkπ
)2 Z L
0u ′′
0 (y ) sin(k
πLy)dy = −
(Lkπ
)3 Z L
0u
(3)0 (y ) cos
(k
πLy)dy.
Die Darstellung (2.38) fur dk ergibt sich genauso. Die Besselsche Ungleichung ergibt
∞X
k=1
|gk |2 + |hk |2
< ∞,
und die Cauchy Schwarzsche Ungleichung liefert dann zusammen mit den Darstellungen (2.37) und (2.38)
Folgendes,
∞X
k=1
k2|ck | =∞
X
k=1
k−1|gk | ≤( ∞
X
k=1
k−2)1/2
·( ∞
X
k=1
|gk |2)1/2
< ∞,
∞X
k=1
k2|dk | =∞
X
k=1
k−1|hk | ≤( ∞
X
k=1
k−2)1/2
·( ∞
X
k=1
|hk |2)1/2
< ∞.
Damit ist die Reihe
u(x, t) =∞
X
k=1
sin(k
πLx)[ck cos
(k
πcLt)
+ dk sin(k
πcLt)]
fur (x, t) ∈ [0, L ] × [0, T ]
und deren ersten und zweiten partiellen Ableitungen gleichmaßig konvergent, und die vorgegeben Anfangs-
werte werden angenommen.

40 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
2.5 Energie, Eindeutigkeit
Im Folgenden wird wieder das folgende Anfangs Randwertproblem fur die Schwingungsgleichung betrach-
tet:
∂2u
∂t2(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ (0, L), t > 0,
u(0, t) = u(L, t) = 0 fur t ∈ [0, T ],
u(x, 0) = u0(x) fur x ∈ [0, L ],
∂u
∂t(x, 0) = u1(x) ..........
.......... .
(2.39)
Wir betrachten das folgende Energiefunktional,
E(t) =Z L
0c2(∂u
∂x(x, t)
)2
+(∂u
∂t(x, t)
)2
dx (2.40)
Theorem 2.5 Fur jede zweimal stetig partiell differenzierbare Losung u : [0, L ] × [0, T ] → R des An-
fangs Randwertproblems (2.39) fur die Schwingungsgleichung gilt
E(t) = E(0) fur t ≥ 0.
BEWEIS. Es genugt der Nachweis, dass die Ableitung der Funktion E verschwindet. Unter Weglassen der
Argumente bei den Integranden in (2.40) erhalt man zunachst
E ′(t) = 2( Z L
0c2∂u
∂x
∂2u∂t∂x
dx +Z L
0
∂u
∂t
= ∂2u∂x2
︷︸︸︷
∂2u
∂t2dx)
, (2.41)
wobei Integration und Differentiation vertauscht wurden. Vertauschung der Reihenfolge der Differentiation
beim Integranden des ersten Integrals in (2.41) und eine anschließende partielle Integration liefert
Z L
0
∂u
∂x
∂2u∂t∂x
dx =Z L
0
∂u
∂x
∂2u∂x∂t
dx(∗)=
∂u
∂x
∂u
∂t
∣∣∣
x=L
x=0︸ ︷︷ ︸
= 0
−Z L
0
∂2u
∂x2
∂u
∂tdx. (2.42)
Hierbei verschwindet der erste Term auf der rechten Seite der Identitat (∗), denn die Randbedingungen in
(2.39) implizieren
∂u
∂t(0, t) =
∂u
∂t(L, t) = 0 fur 0 ≤ t ≤ T.
Ein Einsetzen der Identitat (2.42) in die Identitat (2.41) ergibt E ′(t) = 0 fur 0 ≤ t ≤ T und damit die
Aussage des Theorems.
Theorem 2.6 Es gibt hochstens eine zweimal stetig partiell differenzierbare Losung des Anfangs Rand-
wertproblems (2.39).

Abschnitt 2.6 Ebene Wellen 41
BEWEIS. Fur zwei Losungen u1 und u2 von (2.39) betrachte man die Differenz u = u1 − u2. Dann gilt
insbesondere
u(x, 0) = 0,∂u
∂t(x, 0) = 0 fur 0 ≤ x ≤ L,
und damit auch∂u
∂x(x, 0) = 0 fur 0 ≤ x ≤ L. Mit Theorem 2.5 erhalt man dann
Z L
0c2(∂u
∂x(x, t)
)2
+(∂u
∂t(x, t)
)2
dx =Z L
0c2(∂u
∂x(x, 0)
)2
+(∂u
∂t(x, 0)
)2
dx = 0
fur 0 ≤ t ≤ T.
Daraus erhalt man
∂u
∂t(x, t) =
∂u
∂x(x, t) fur 0 ≤ x ≤ L, 0 ≤ t ≤ T
und damit insbesondere
u(x, t) ≡ C fur 0 ≤ x ≤ L, 0 ≤ t ≤ T
Wegen u(0, t) = 0 fur 0 ≤ t ≤ T erhalt man daraus u = 0 beziehungsweise u1 = u2 auf [0, L ] × [0, T ].
2.6 Ebene Wellen
Im Folgenden wird wieder das folgende Anfangswertproblem fur die raumlich unbeschrankte Schwingungs-
gleichung in d Raumvariablen betrachtet:
∂2u
∂t2(x, t) = c2∆u(x, t) fur x ∈ R
d, t ∈ (0, T ). (2.43)
Fur beliebige Koeffizienten
α1, α2, . . . , αd ∈ R mit α21 + α2
2 + . . . + α2d = 1
und zweimal stetig differenzierbare Funktionen f : R → R bildet
u(x, t) = f(α1x1 + α2x2 + . . . + αdxd − ct) fur x = (x1, x2, . . . , xd ) ∈ Rd (2.44)
eine Losung von (2.43) (Ubungsaufgabe). Fur fest gewahlte Werte t und θ stellt
α1x1 + α2x2 + . . . + αdxd − ct = θ (2.45)
eine Ebene in Rd dar. Die Ebenen (2.45) stellen Niveaulinien der Losungen dar (2.44), weshalb diese Losun-
gen als ebene Wellen bezeichnet werden. Im ubrigen steht der Vektor n = (α1, α2, . . . , αd ) ∈ Rd senkrecht
auf dieser Ebene, und fur wachsende Werte von t bewegt sich diese Ebene mit der Geschwindigkeit c in die
Richtung des Vektors n.

42 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
2.7 Spharische Wellenfunktionen
Es werden nun rotationssymmetrische Losungen u : Rd → R der Schwingungsgleichung gesucht. Dabei
handelt es sich um Funktionen von der Form
u(x, t) = v( |x|2, t) fur x ∈ Rd, t > 0 (2.46)
mit einer reellwertigen, zweimal stetig partiell differenzierbaren Funktion v (r, t) fur r ≥ 0, t ≥ 0.
Proposition 2.7 Es ist die Funktion u aus (2.46) eine Losung der Schwingungsgleichung (2.43) genau dann,
wenn die Funktion v = v(r, t) die partielle Differenzialgleichung
∂2v
∂t2= c2
(∂2v
∂r2 +d − 1
r
∂v
∂r
)
fur r ≥ 0 (2.47)
lost.
BEWEIS. Der Ansatz (2.46) fuhrt auf
∂u
∂xk(x, t) =
∂v
∂r( |x|2, t) xk
|x |2 ,∂2u
∂x2k
(x, t) =∂2v
∂r2 ( |x|2, t) x2k
|x |22+
∂v
∂r( |x|2, t)
(1
|x |2 − x2k
|x |32
)
und liefert
(∆u)(x, t) =∂2v
∂r2 ( |x|2, t)( d
X
k=1
x2k
|x |22
)
+∂v
∂r( |x|2, t)
dX
k=1
(1
|x |2 − x2k
|x |32
)
=∂2v
∂r2 ( |x|2, t) +∂v
∂r( |x|2, t)
(d
|x |2 − 1
|x |2
)
=∂2v
∂r2 ( |x|2, t) +d − 1
|x |2∂v
∂r( |x|2, t).
Dies fuhrt auf die partielle Differenzialgleichung zweiter Ordnung (2.47) fur die Funktion v : R+ × R+ →R.
Eine aquivalente und haufig verwendete Formulierung fur (2.47) ist
∂2v
∂t2= c2
1
rd−1
∂
∂r
(rd−1∂v
∂r
)fur r ≥ 0, t ≥ 0, (2.48)
wie man leicht nachrechnet.
2.7.1 Der raumlich dreidimensionale Fall d = 3
Im Fall d = 3 lasst sich die partielle Differenzialgleichung (2.47) mit einer Substitution weiter vereinfachen.
Proposition 2.8 Es ist die Funktion v(r, t) eine Losung von (2.47) genau dann, wenn die Funktion
w(r, t) = rv(r, t) fur r ≥ 0, t ≥ 0
eine Losung der raumlich eindimensionalen Schwingungsgleichung
∂2w
∂t2= c2
∂2w
∂r2 fur r ≥ 0, t ≥ 0 (2.49)
darstellt.

Abschnitt 2.7 Sph arische Wellenfunktionen 43
BEWEIS. Es gilt
∂2
∂r2
(wr
)
+2r
∂
∂r
(wr
)
=∂
∂r
( r ∂w∂r
−w
r2
)
+2r
r ∂w∂r
− w
r2
=∂∂r
(r ∂w∂r
− w )r2 − 2r(r ∂w∂r
− w )
r4+
2r ∂w∂r
− w
r3
=1
r3
r(
∂2w
∂r2 +∂w
∂r− ∂w
∂r
)
− 2r∂w
∂r+ 2w + 2r
∂w
∂r− 2w
=1r
∂2w
∂r2
beziehungsweise
∂2
∂t2
(wr
)
=1r
∂2w
∂t2.
Dies komplettiert den Beweis.
Theorem 2.9 Die Funktionen
u(x, t) =1
|x |2[f( |x|2 − ct) + g( |x|2 + ct)
](2.50)
mit zweimal stetig differenzierbaren Funktionen f : R → R und g : R → R stellen Losungen der raumlich
dreidimensionalen Schwingungsgleichung
∂2u
∂t2= c2∆u fur x ∈ R
3, t ≥ 0,
dar.
BEWEIS. Die Funktionen
w(r, t) = f (r − ct) + g(r + ct)
stellen Losungen von (2.53) dar. Damit lost die Funktion
v(r, t) =1r(f (r − ct) + g(r + ct))
die Differenzialgleichung (2.48), und die Aussage des Theorems folgt dann aus Proposition 2.7.
2.7.2 Der raumlich zweidimensionale Fall d = 2
Im raumlich zweidimensionalen Fall d = 2 geht die rotationssymmetrische Schwingungsgleichung in der
symmetrischen Formulierung (2.47) uber in
∂2v
∂t2= c2
1r
∂
∂r
(r∂v
∂r
)fur r ≥ 0, t ≥ 0. (2.51)
Diese Differenzialgleichung (2.51) bezeichnet man als Differenzialgleichung der zylindrischen Wellenaus folgendem Grund. Die raumlich dreidimensionale Schwingungsgleichung
∂2u
∂t2= c2
( ∂2u
∂x21
+∂2u
∂x22
+∂2u
∂x23
)fur x = (x1, x2, x3 ) ∈ R
3, t ≥ 0 (2.52)
geht bei Verwendung von zylindrischen Koordinaten
x1 = r cos θ, x2 = r sin θ, x3 = z, u(x1, x2, x3, t) = v(r, θ, z, t), (2.53)
uber in∂2v
∂t2= c2
(1r
∂
∂r
(r∂v
∂r
)+
1
r2
∂2v
∂θ2 +∂2v
∂z2
)
fur r ≥ 0, 0 ≤ θ ≤ 2π, z ∈ R, t ≥ 0 (2.54)
(Ubungsaufgabe). Fur von θ und z unabhangige Funktionen v schließlich ist Differenzialgleichung (2.54)
gleichbedeutend mit (2.53). Die Niveauflachen solcher nur von r abhangender Funktionen stellen Zylinder
dar, was die Bezeichnung zylindrische Wellen nahelegt.

44 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
2.8 Trennung der Veranderlichen im mehrdimensionalen Fall
Fur die mehrdimensionale Schwingungsgleichung
∂2u
∂t2(x, t) = c2∆u(x, t) fur x ∈ G, t ≥ 0, (2.55)
mit einer offenen Menge G ⊂ Rd wird der Ansatz
u(x, t) = v(x)T (t) fur x ∈ G, t ≥ 0 (2.56)
herangezogen. Als Erstes werden Bedingungen an die Funktionen v : G → R und T : R+ → R hergeleitet,
so dass die zugehorige Funktion u aus (2.56) die Schwingungsgleichung (2.55) erfullt. Hierzu berechnet
man ausgehend von dem Ansatz (2.56) zunachst
∂2u
∂t2(x, t) = v(x)T ′′(t), ∆u(x, t) = ∆v(x)T (t) fur x ∈ G, t ≥ 0,
so dass fur die Erfullung der Schwingungsgleichung notwendigerweise
c2∆v(x)
v(x)=
T ′′(t)
T (t)fur x ∈ G, t ≥ 0 (2.57)
gelten muss. Dies bedeutet aber
c2∆v(x)
v(x)=
T ′′(t)
T (t)= −µ fur x ∈ G, t ≥ 0, (2.58)
mit einer noch zu spezifizierenden reellen Konstanten µ ∈ R. Die Darstellung (2.58) fuhrt unmittelbar auf
die beiden Eigenwertprobleme
c2∆v(x) + µv(x) = 0 fur x ∈ G, (2.59)
T ′′(t) + µT (t) = 0 fur t ≥ 0. (2.60)
Wir betrachten hier nur den Fall µ = s2 > 0. Dann besitzt (2.60) die beiden linear unabhangigen Losungen
cos st, sin st
Auf die reduzierte Schwingungsgleichung (2.59) wird ein weiterer Separationsansatz angewendet. Hier wer-
den spharische Koordinaten
x1 = r cosϕ cos θ, x2 = r sinϕ cos θ, x3 = r sin θ (2.61)
fur r ≥ 0, ϕ ∈ [0, 2π ], θ ∈ [−π/2, π/2],
herangezogen. Mit der neuen Notation
v(x1, x2, x3 ) = w(r, ϕ, θ)
erhalt man (ohne Beweis)
∆v =1
r2
∂
∂r
(r2 ∂w
∂r
)+ Λ3w
mit Λ3w :=1
sin θ
∂
∂θ
(
sin θ∂w
∂θ
)
+1
sin2 θ
∂2w
∂ϕ2 . (2.62)
Die Differenzialgleichung (2.59) geht damit uber (sei jetzt c = 1 )
1
r2
∂
∂r
(r2∂w
∂r
)+ Λ3w
+ s2w = 0. (2.63)

Abschnitt 2.9 Nachtrag zur r aumlich unbeschr ankten eindimensionalen Schwingungsgleichung 45
Wir betrachten nun Losungen von der Form
w(r, ϕ, θ) = R(r)Y (ϕ, θ)
und erhalten so
1
r2
ddr
(r2 dRdr
) + s2R
1r2R
= −Λ3Y
Y= γ
mit einem Separationsparameter γ. Die separierten Gleichungen lauten dann
Λ3Y + γY = 0, (2.64)
r2R ′′ + 2rR ′ + (s2r2 − γ )R = 0. (2.65)
Die Differenzialgleichung (2.64) besitzt nur fur
γk = k(k + 1), k = 0, 1, . . .
glatte Losungen. Es handelt sich dabei um 2k + 1 linear unabhangige Funktionen
Y(`)
k (ϕ, θ) fur ` = 1, 2, . . . , 2k + 1,
die als “spherical harmonics“ bezeichnet werden. Fur jedes k fuhrt man in (2.65) noch die neue Funktion
S = r1/2R ein und erhalt hierfur die gewohnliche Differenzialgleichung
r2S ′′ + rS ′ +[(s2r2 −
(k + 1
2
)2)]S = 0.
Diese gewohnliche Differenzialgleichung heisst Besselsche Differenzialgleichung. Sie besitzt zwei linear
unabhangige Losungen
Jk+1/2(sr), J−(k+1/2)(sr),
mit
Jν (z ) =∞
X
m=0
( − 1)m(z/2)ν+2m
m!Γ(ν +m+ 1),
wobei Γ die Eulersche Gammafunktion bezeichnet.
2.9 Nachtrag zur raumlich unbeschrankten eindimensionalen Schwingungs-gleichung
Es wird nun wieder die raumlich unbeschrankte eindimensionale Schwingungsgleichung betrachtet (ver-
gleiche (2.4)),
∂2u
∂t2(x, t) = c2
∂2u
∂x2(x, t) fur x ∈ R, t > 0. (2.66)
In Abschnitt 2.2 ist eine Klasse von Losungen dieser Differenzialgleichung (2.66) angegeben worden. Es
wird nun nachgewiesen, dass es keine weiteren Losungen gibt. Hierzu fuhrt man die Variablentransformation
ξ = x− ct ∈ R, η = x+ ct ∈ R
durch und betrachtet die zugehorige Funktion
v(ξ, η ) := u(x, t) = u( ξ + η
2,
η − ξ2c
)fur ξ, η ∈ R.

46 Kapitel 2 Wellenausbreitung – Mathematische Modellierung und numerische L osung
Partielle Differentiation nach η liefert∂v
∂η(ξ, η ) = 1
2
(∂u
∂x+
1c
∂u
∂t
)( ξ + η
2,
η − ξ
2c
)fur ξ, η ∈ R.
Anschließende Differentiation nach ξ ergibt dann
∂2v∂ξ ∂η
(ξ, η ) = 14
(∂2u
∂x2 − 1c
∂2u∂t∂x
+1c
∂2u∂x∂t
− 1
c2
∂2u
∂t2
)( ξ + η2,
η − ξ2c
)
= 14
(∂2u
∂x2 − 1
c2
∂2u
∂t2
)( ξ + η2,
η − ξ2c
) != 0 fur ξ, η ∈ R.
Es stellt also die Funktion u genau dann eine Losung der raumlich unbeschankten Schwingungsgleichung
(2.66) dar, wenn ∂2v∂ξ ∂η
= 0 auf R2 gilt beziehungsweise
v(ξ, η ) = f (ξ ) + g(η ) fur ξ, η ∈ R
erfullt ist mit zweimal stetig differenzierbaren Funktion f, g : R → R. Mit den urspunglichen Variablen
x, t bedeutet dies
u(x, t) = v(ξ, η ) = f (ξ ) + g(η ) = f (x− ct) + g(x+ ct) fur x ∈ R, t > 0.

47
3 Klassifikation partieller Differenzialgleichungen
3.1 Quasilineare partielle Differenzialgleichungen
Eine quasilineare partielle Differenzialgleichung 2. Ordnung von d Veranderlichen ist von der Form
dX
k,j=1
akj∂2u
∂xk ∂xj+ R = 0 mit akj = ajk, (3.1)
wobei akj und R reellwertige Funktionen sind, die von den Veranderlichen x1, x2, . . . , xd sowie von u
und deren ersten partiellen Ableitungen∂u
∂x1,∂u
∂x2, . . . ,
∂u
∂xdabhangen durfen. Die partielle Differenzialglei-
chung (3.1) wird als linear bezeichnet, falls die akj Funktionen nur von den Veranderlichen x1, x2, . . . , xd
und die Funktion R von der Form
R =d
X
k=1
bk∂u
∂xk+ cu − f (3.2)
ist mit Funktionen b1, b2, . . . , bd, c, f : Rd → R. Im Spezialfall d = 2 ist eine lineare partielle Differenzi-
algleichung von der Form
a1∂2u
∂x2 + a2∂2u
∂x∂y+ a3
∂2u
∂y2 + b1∂u
∂x+ b2
∂u
∂y+ cu = f. (3.3)
3.2 Charakteristiken
Aus der Theorie der Anfangswertprobleme fur gewohnliche Differenzialgleichungen zweiter Ordnung u ′′ =
F (x, u, u ′ ) fur x ≥ x0 ist bekannt, dass im Allgemeinen eine Vorgabe von u(x0 ) und u ′(x0 ) erforderlich
ist, um die Eindeutigkeit und Existenz der Losung u(x) fur x > x0 zu garantieren.
Im Folgenden soll nun fur die lineare partielle Differenzialgleichung (3.3) untersucht werden, inwieweit fur
eine vorgegebene hinreichend glatte Kurve
Γ = (x, y(x)) : x ∈ I ⊂ R2
(mit einem Intervall I ⊂ R ) eine Vorgabe der Daten
u,∂u
∂x,
∂u
∂yauf Γ (3.4)
hinreichend fur die Eindeutigkeit der Losung u von (3.3) in einer Umgebung der Kurve Γ ist. Die Daten
(3.4) bezeichnet man kurz als Cauchydaten.
Die Vorgehensweise ist nun so, dass festgestellt wird, ob sich daraus die zweiten partiellen Ableitungen∂2u∂x2 und ∂2u
∂y2 in eindeutiger Weise bestimmen lassen. Ist namlich der Verlauf der Kurve Γ so, dass diese
zweiten partiellen Ableitungen eindeutig festgelegt sind, so lassen sich durch wiederholte Differenziation
(hinreichende Glattheit der Koeffizienten vorausgesetzt) die partiellen Ableitungen von u beliebig hoher
Ordnung berechnen, und eine Taylorentwicklung ermoglicht dann (formal) eine eindeutige Fortsetzung der
gegebenen Cauchydaten von u auf der Kurve Γ auf eine Umgebung von Γ.

48 Kapitel 3 Klassifikation partieller Differenzialgleichungen
Die partiellen Ableitungen ∂u∂x
und ∂u∂y
sind vorgegeben, also auch die Ableitungen
ddx
∂u
∂x(x, y(x)) =
∂2u
∂x2 +∂2u
∂x∂yy ′,
ddx
∂u
∂y(x, y(x)) =
∂2u∂x∂y
+∂2u
∂y2 y′ fur x ∈ I. (3.5)
Dies zusammen mit (3.3) fuhrt auf ein System von drei linearen Gleichungen fur die zweiten Ableitungen∂2u
∂x2 ,∂2u
∂y2 ,∂2u
∂x∂y. Die zugehorige Koeffizientenmatrix besitzt in x ∈ I die Determinante
det
a1 a2 a3
1 y ′ 0
0 1 y ′
= a1(y′ )2 − a2y
′ + a3. (3.6)
Die Determinante verschwindet also fur solche Kurven, bei denen die Ableitung y ′(x) der quadratischen
Gleichung
a1(y′ )2 − a2y
′ + a3 = 0 fur x ∈ I (3.7)
genugt. Solche Kurven werden als charakteristische Kurven bezeichnet. Je nach der Form der Koeffizien-
ten in (3.7) gibt es keine, eine, oder zwei charakteristische Kurven durch einen Punkt (x, y ). Dies hangt ab
von dem Vorzeichen der Diskriminante
D := a22 − 4a1a3.
Definition 3.1 Man nennt die quasilineare partielle Differenzialgleichung (3.3) in einem Punkt (x, y ) ∈ R2
• elliptisch, falls D < 0 (keine charakteristische Richtung)
• parabolisch, falls D = 0 (genau eine .................... )
• hyperbolisch falls D > 0 (zwei .................... en)
Im quasilinearen Fall hangt die Klassifikation noch von den speziellen Cauchydaten ab.
Beispiel 3.2 (a) Im Fall der Diffusionsgleichung ∂u∂t
= c2 ∂2u∂x2 fur x ∈ R, t ≥ 0 gilt (mit der Notation
y = t) in allen Punkten a1 = c2 und a2 = a3 = 0, daher ist D = 0 und die Diffusionsgleichung demnach
parabolisch. Fur die charakteristischen Richtungen gilt
(y ′ )2 = 0 ; y ′ = const,
dies sind Parallelen zur x-Achse.
(b) Die Black Scholes Gleichung
−∂u
∂τ=
σ(x, t)2
2x2 ∂2u
∂x2 + rx∂u
∂x− ru fur x > 0, 0 ≤ τ ≤ T, (3.8)
ist in allen Punkten (x, τ ) mit x > 0 parabolisch.
(c) Im Fall der Schwingungsgleichung ∂2u∂t2
= c2 ∂2u∂x2 fur x ∈ R, t > 0, gilt (mit der Notation y = t) in
allen Punkten a1 = c2, a3 = −1 und a2 = 0. Daher ist D = 4c2 und die Schwingungsgleichung demnach
hyperbolisch. Fur die charakteristischen Richtungen gilt

Abschnitt 3.2 Charakteristiken 49
(y ′ )2 − 1
c2 = 0 ; y ′ = ± 1const
,
dies sind Geraden von der Form
y ± 1cx = const.
M
Beispiel 3.3 Es wird nun ein Potenzreihenansatz zur Losung der Diffusionsgleichung mit vorgegebenen
Cauchydaten auf einer nichtcharakteristischen Kurve betrachtet. Das vorliegende Problem ist von folgender
Form:
∂u
∂t=
∂2u
∂x2 fur x ∈ R, t > 0,
u(0, t) = g(t) fur t ≥ 0,∂u
∂x(0, t) = 0 fur t ≥ 0.
(3.9)
Der Ansatz
u(x, t) =∞
X
s=0
as(t)xs fur x ∈ R, t > 0
liefert
∂u
∂t(x, t) =
∞X
s=0
a ′s(t)x
s
∂u
∂x(x, t) =
∞X
s=0
(s+ 1)as+1(t)xs,∂2u
∂x2(x, t) =
∞X
s=0
(s+ 2)(s+ 1)as+2(t)xs.
Dies eingesetzt in die Gleichung ∂u∂t
= ∂2u∂x2 und ein anschließender Koeffizientenvergleich liefert
as+2(t) =1
(s + 2)(s + 1)a ′
s(t) fur t > 0 (s = 0, 1, . . .).
Die Anfangsbedingungen in (3.9) liefern noch
u(0, t) = a0(t)!= g(t),
∂u
∂x(0, t) = a1(t)
!= 0.
Dies bedeutet
a2n+1(t) = 0, a2n(t) =g(n)(t)
(2n)!fur t ≥ 0, n = 0, 1, . . .
und resultiert letztlich in
u(x, t) =∞
X
n=0
g(n)(t)
(2n)!x2n fur x ∈ R, t > 0. (3.10)
Wir betrachten nun in (3.9) den speziellen Fall
g(t) =
exp (−t−α ) fur t > 0
0 fur t = 0(α > 1). (3.11)

50 Kapitel 3 Klassifikation partieller Differenzialgleichungen
Mit Hilfe des Residuensatzes weist man nun fur einen geeigneten positiven Parameter die Abschatzung
|g(s)(t)| ≤ s!(θt)s exp
(– t−α
2
)fur t > 0 (s = 0, 1, . . .)
nach, und daraus folgt unmittelbar∞
X
n=0
∣∣∣g(n)(t)
(2n)!(t)x2n
∣∣∣ ≤
∞X
n=0
|x |2n
n!(θt)n exp(− 12t−α ) = exp
(1t
( |x |2θ
− 12t1−α
))
fur t > 0.
Damit konvergiert die betrachtete Potenzreihe (3.10) mit der speziellen Funktion (3.11) tatsachlich fur jede
reelle Zahl x. Dies rechtfertigt nachtraglich die formalen Differenziationen und die durchgefuhrten Koef-
fizientenvergleiche und zeigt außerdem, dass die in (3.10) betrachtete Funktion tatsachlich fur x ∈ R und
t > 0 definiert ist.
Dieses Beispiel ist das Standardbeispiel (siehe z. B. Friedman [3] oder John [10]) fur die Nichteindeutigkeit
der Losung des Anfangswertproblems
∂u
∂t=
∂2u
∂x2 fur x ∈ R, t > 0,
u(x, 0) = 0 fur x ∈ R. M
Bemerkung 3.4 Fur die in (3.11) betrachtete Funktion gilt wegen der im Anschluss an die Definition ange-
geben Abschatzung
g ∈ C∞(R ), g(s)(0) = 0 fur s = 1, 2, . . . .
Diese Funktion ist ein Beispiel fur eine unendlich oft differenzierbare Funktion, die von ihrer Taylorent-
wicklung∞
X
s=0
g(s)(0)
s!xs = 0 fur x ∈ R
abweicht. M
3.3 Typeneinteilung f ur quasilineare Differenzialgleichungen zweiter Ord-nung in d Veranderlichen
Im Folgenden wird eine Klassifikation fur allgemeine quasilineare partielle Differenzialgleichung 2. Ord-
nung vorgenommen und bezeichnen hierzu
A := (akj ) ∈ Rd×d.
Definition 3.5 Man nennt die quasilineare partielle Differenzialgleichung (3.1) in einem Punkt (x, y ) ∈R
2
• elliptisch, falls die Eigenwerte der Matrix A entweder alle positiv oder alle negativ ausfallen.• parabolisch, falls mindestens ein Eigenwert der Matrix A verschwindet.• hyperbolisch, falls alle bis auf einen Eigenwert von einem Vorzeichen sind und der verbliebene Eigen-
werte das andere Vorzeichen besitzt.
Beispiel 3.6 (a) Fur die raumlich zweidimensionale Diffusionsgleichung
∂u
∂t= c2
( ∂2u
∂x2 +∂2u
∂y2
)fur (x, y ) ∈ D, t > 0,

Abschnitt 3.3 Typeneinteilung quasilinearer Differenzialgleichungen 51
mit einer offenen Menge D ⊂ R2 gilt (mit der Notation x1 = x, x2 = y und x3 = t)
A = c2
(1
10
)
.
In diesem Fall ist die Matrix A von Diagonalgestalt, so dass man die Eigenwerte direkt auf der Diagonalen
ablesen kann. Die raumlich zweidimensionale Diffusionsgleichung ist demnach in allen Punktion (x, y, t)
parabolisch.
(b) Fur die raumlich dreidimensionale Schwingungsgleichung
∂2u
∂t2= c2
( ∂2u
∂x2 +∂2u
∂y2 +∂2u
∂z2
)fur (x, y, z ) ∈ D, t > 0,
mit einer offenen Menge D ⊂ R3 gilt (mit der Notation x1 = x, x2 = y, x3 = z und x4 = t)
A =
c2
c2
c2
−1
.
In diesem Fall ist die Matrix Awiederum von Diagonalgestalt, so dass man die Eigenwerte wieder direkt auf
der Diagonalen ablesen kann. Die raumlich dreidimensionale Schwingungsgleichung ist demnach in allen
Punkten (x, y, z, t) hyperbolisch. M

52 Kapitel 4 Die Poissongleichung
4 Die Poissongleichung
4.1 Einf uhrung
Die Poisson Gleichung ist von der Form
∆u :=d
X
k=1
∂2u
∂x2k
= f (x) fur x = (x1, x2, . . . , xd ) ∈ D, (4.1)
mit einer offenen beschrankten Menge D ⊂ Rd, wobei die Funktion f : D → R gegeben und die Funktion
u : D → R zu bestimmen ist. Im Fall f = 0 spricht man von der Laplace Gleichung. Die Losungen der
Laplace Gleichung nennt man harmonische Funktionen. Die Poisson Gleichung wird zum Beispiel in
Verbindung mit Dirichletranddaten
u = g auf ∂D (4.2)
oder auch mit Neumannranddaten
∂u
∂n= g auf ∂D (4.3)
betrachtet.
4.2 Klassifkation
Fur die dreidimensionale Poisson Gleichung
∂2u
∂x2 +∂2u
∂y2 +∂2u
∂z2 = f (x, y, z ) fur (x, y, z ) ∈ D,
mit einer offenen beschrankten Menge D ⊂ R3 gilt (mit der Notation x1 = x, x2 = y und x3 = z )
A =
(1
11
)
.
Die dreidimensionale Poisson Gleichung ist demnach in allen Punkten (x, y, z ) elliptisch.
4.3 Der rotationssymmetrische Fall
4.3.1 Der Torus
Es werden fur den Torus
D = x ∈ Rd : rmin < |x|2 < rmax (0 < rmin < rmax fix)
rotationssymmetrische Losungen u : D → R der Laplace Gleichung gesucht, dies sind Losungen von der
Form
u(x) = v( |x|2 ) fur x ∈ D (4.4)

Abschnitt 4.4 Der zweidimensionale Fall, Polarkoordinaten 53
mit einer Funktion v : [rmin , rmax ] → R, die auf dem offenen Intervall (rmin , rmax ) zweimal stetig differen-
zierbar und an den Randern r = rmin und r = rmax stetig ist. Der Ansatz (4.4) fuhrt auf
∂u
∂xk(x) = v ′( |x|2 )
xk
|x |2 ,∂2u
∂x2k
(x) = v ′′( |x|2 )x2
k
|x |22+ v ′( |x|2 )
(1
|x |2 − x2k
|x |32
)
und liefert
(∆u)(x) = v ′′( |x|2 )( d
X
k=1
x2k
|x |22
)
+ v ′( |x|2 )d
X
k=1
(1
|x |2 − x2k
|x |32
)
= v ′′(|x|2 ) + v ′(|x|2 )
(d
|x |2 − 1
|x |2
)
= v ′′( |x|2 ) +d − 1
|x |2 v′(|x|2 ).
Die Losungen der gewohnlichen Differenzialgleichung zweiter Ordnung
v ′′(r) +d − 1
rv ′(r) = 0 fur rmin < r < rmax (4.5)
lassen sich unmittelbar angeben, dies sind
v(r) =
c1 + c2 log r, falls d = 2,
c1 + c2r2−d sonst
(4.6)
mit reellen Konstanten c1 und c2. Diese Funktionen v liefern genau die rotationssymmetrischen Losungen
(4.4) der Laplace Gleichung. Die Konstanten c1 und c2 werden an die vorgegebenen Randdaten auf den
Kreisen mit den Radien r = rmin und r = rmax angepasst.
Bemerkung 4.1 Der vorgestellte Ansatz zur Gewinnung rotationssymmetrischer harmonischer Funktionen
auf Kugeln
D = x ∈ Rd : |x|2 ≤ rmax (rmax > 0 fix)
liefert außer den konstanten Losungen keine weiteren Losungen. Dies ist darin begrundet, dass die sich
ergebenden Funktionen (4.6) im Fall d ≥ 2 singular sind beziehungsweise im Fall d = 1 eine im Ursprung
nichtdifferenzierbare Funktion u liefern. M
4.4 Der zweidimensionale Fall, Polarkoordinaten
Bei der Betrachtung der zweidimensionalen Poisson Gleichung
∂2u
∂x2 +∂2u
∂y2 = f (x, y ) fur (x, y ) ∈ D ⊂ R2 (4.7)
auf rotationsinvarianten Gebieten D ⊂ R2 ist die Verwendung von Polarkoordinaten
x = r cosϕ, y = r sinϕ, u(x, y ) = U (r, ϕ), f (x, y ) = F (r, ϕ), (4.8)
sinnvoll. Mit diesen Notationen (4.8) geht (4.7) uber in ( Ubungsaufgabe)
∂2U
∂r2 +1r
∂U
∂r+
1
r2
∂2U
∂ϕ2 = F (r, ϕ) fur r geeignet, 0 ≤ ϕ ≤ 2π. (4.9)

54 Kapitel 4 Die Poissongleichung
4.4.1 Der Kreis
Wir betrachten im Folgenden das Dirichletsche Randwertproblem fur die Laplace Gleichung auf einem
Kreis,
∂2u
∂x2 +∂2u
∂y2 = 0 fur (x, y ) ∈ R2 mit x2 + y2 < R2, (4.10)
u = g(x, y ) fur (x, y ) ∈ R2 mit x2 + y2 = R2. (4.11)
Im Fall des Kreises mit Radius R ≥ 0 und Mittelpunkt im Ursprung verwendet man die Polarkoordinaten-
darstellung (4.9) und erhalt mit der Notation g(x, y ) = G(r, ϕ)
∂2U
∂r2 +1r
∂U
∂r+
1
r2
∂2U
∂ϕ2 = 0 fur 0 ≤ r ≤ R, 0 ≤ ϕ ≤ 2π, (4.12)
U (R,ϕ) = G(ϕ) fur 0 ≤ ϕ ≤ 2π. (4.13)
Eine Familie von Losungen dieses Problems wird mit dem Separationsansatz
U (r, ϕ) = S(r)Φ(ϕ) fur 0 ≤ r ≤ R, 0 ≤ ϕ ≤ 2π
gewonnen. Aus (4.12) erhalt man so
r2S′′(r)
S(r)+ r
S ′(r)
S(r)= −Φ ′′(ϕ)
Φ(ϕ)= λ
mit einem von r und ϕ unabhangigen Separationsparameter λ. Die separierten Gleichungen lauten dann
Φ ′′ + λΦ = 0 fur 0 ≤ ϕ ≤ 2π, (4.14)
r2S ′′ + rS ′ − λS = 0 fur 0 ≤ r ≤ R (4.15)
mit einem noch zu spezifizierenden Separationsparameter λ. Eine notwendige Bedingung fur Glattheit ist
stetige Differenzierbarkeit der Funktion Φ sowie
Φ(0) = Φ(2π ), Φ ′(0) = Φ ′(2π ). (4.16)
Bei (4.14), (4.16) handelt es sich um ein Eigenwertproblem fur eine gewohnliche Differenzialgleichung
zweiter Ordnung mit periodischen Randbedingungen. Die Eigenwerte und zugehorigen Eigenfunktionen
lauten
λn = n2, Φn(ϕ) = an cos (nϕ) + bn sin (nϕ) fur n = 0, 1, . . . . (4.17)
Losungen der gewohnlichen Differenzialgleichung (4.15) erhalt man mit dem Ansatz
S(r) = rβ (β ≥ 0).
Die Restriktion β ≥ 0 ist sinnvoll, da ansonsten eine Singularitat bei r = 0 vorliegt. Zusammen mit der
Setzung λ = n2 fuhrt dies auf
β(β − 1)rβ + βrβ − n2rβ = (β2 − n2 )rβ = 0
und ergibt
β = n.

Abschnitt 4.4 Der zweidimensionale Fall, Polarkoordinaten 55
Superposition ergibt letztlich
U (r, ϕ) = a0 +∞
X
n=1
rn(an cos nϕ + bn sin nϕ
)(4.18)
mit noch an die Randbedingungen anzupassenden Koeffizienten an und bn. Hierzu gehen wir von einer
Fourier Entwicklung
G(ϕ) = d0 +∞
X
n=1
(dn cos nϕ + en sin nϕ
)fur 0 ≤ ϕ ≤ 2π
aus. Ein Koeffizientenvergleich liefert unmittelbar
an = R−ndn fur n = 0, 1, . . ., bn = R−nen fur n = 1, 2, . . .,
und aus (4.18) erhalt man dann
U (r, ϕ) = d0 +∞
X
n=1
( rR
)n(dn cos nϕ + en sin nϕ
). (4.19)
Die Fourierkoeffizienten der Funktion G haben die Form
d0 :=12π
Z 2π
0G(θ) dθ, dn :=
1π
Z 2π
0G(θ) cosnθ dθ, en :=
1π
Z 2π
0G(θ) sinnθ dθ (4.20)
fur n = 1, 2, . . . .
Dies in (4.19) eingesetzt liefert
U (r, ϕ)
=12π
Z 2π
0G(θ) dθ +
1π
∞X
n=1
( rR
)n( Z 2π
0G(θ) cosnθ cosnϕdθ +
Z 2π
0G(θ) sinnθ sinnϕdθ
)
= .................... +
1π
∞X
n=1
( rR
)nZ 2π
0G(θ) cosn(θ − ϕ) dθ
=12π
Z 2π
0G(θ)
(
1 + 2∞
X
n=1
( rR
)ncosn(θ − ϕ)
)
dθ.
Mit der Setzung
P (ρ, ξ ) =12π
(
1 + 2∞
X
n=1
ρn cos nξ)
(4.21)
fuhrt dies auf die Darstellung
U (r, ϕ) =Z 2π
0P ( r
R, ϕ− θ )G(θ) dθ fur 0 ≤ r < R, 0 ≤ ϕ ≤ 2π. (4.22)
Lemma 4.2 Es gilt
P (ρ, ξ ) =12π
1 − ρ2
1 + ρ2 − 2ρ cos ξfur 0 ≤ ρ < 1, 0 ≤ ξ ≤ 2π. (4.23)
BEWEIS. Aus der Polarkoordinatendarstellung der komplexen Zahl
z = ρeiξ = ρ( cos ξ + i sin ξ ) (4.24)

56 Kapitel 4 Die Poissongleichung
erhalt man unmittelbar
zn = ρneinξ = ρn( cosnξ + i sinnξ )
und damit
1 + 2∞
X
n=1
ρn cosnξ = Re(1 + 2
∞X
n=0
zn)
fur |z | < 1.
Nun gilt
11 − z
=∞
X
n=0
zn fur |z | < 1
und somit1 + z1 − z
= 1 + 2∞
X
n=1
zn fur |z | < 1.
Dies fuhrt schließlich auf
P (ρ, ξ ) =12π
Re(
1 + z1 − z
)(∗)=
12π
1 − ρ2
1 + ρ2 − 2ρ cos ξfur 0 ≤ r < 1.
Hierbei folgt die Identitat (∗) aus der allgemeinen Rechnung
Re
(1 + z1 − z
)
= Re
(1 + 2iIm z − |z |2
(1 − z )(1 − z )
)
=1 − |z |2
(1 − Re z )2 + (Im z )2=
1 − |z |21 − 2Re z + |z |2
und der Polarkoordinatendarstellung (4.24).
Aus der Darstellung (4.25) und Lemma 4.2 erhalt man unmittelbar das folgende Resultat.
Korollar 4.3 Es gilt
U (r, ϕ) =12π
Z 2π
0
R − r2
R2 + r2 − 2rR cos (ϕ − θ )G(θ) dθ fur 0 ≤ r < R, 0 ≤ ϕ ≤ 2π. (4.25)
4.4.2 Der Kreisring
Wir betrachten im Folgenden ein Dirichletsches Randwertproblem fur die Laplace Gleichung auf einem
Kreisring,
∂2u
∂x2 +∂2u
∂y2 = 0 fur (x, y ) ∈ R2 mit % < x2 + y2 < R2, (4.26)
u = g(x, y ) fur (x, y ) ∈ R2 mit x2 + y2 = %2, (4.27)
u = 0 fur (x, y ) ∈ R2 mit x2 + y2 = R2. (4.28)
Mit der Polarkoordinatendarstellung (4.9) und mit der Notation g(x, y ) = G(r, ϕ) erhalt man
∂2U
∂r2 +1r
∂U
∂r+
1
r2
∂2U
∂ϕ2 = 0 fur % ≤ r ≤ R, 0 ≤ ϕ ≤ 2π (4.29)
U (%, ϕ) = G(ϕ), U (R,ϕ) = 0 fur 0 ≤ ϕ ≤ 2π. (4.30)
Die gleiche Vorgehensweise wie in der Situation des Kreises liefert nach Superposition Losungen
U (r, ϕ) = a0 +∞
X
n=1
(rnan + r−ncn
)cos nϕ +
(rnbn + r−ndn
)sin nϕ
(4.31)
mit noch an die Randbedingungen anzupassenden Koeffizienten an, bn, cn und dn. Die außeren Randbedin-
gungen in (4.32) ergeben

Abschnitt 4.5 Die Poisson– Gleichung in der Ebene 57
a0 = 0, cn = −R2nan fur n = 0, 1, . . ., dn = −R2nbn fur n = 1, 2, . . .,
und man erhalt
U (r, ϕ) =∞
X
n=1
(rn − R2n
rn
)an cos nϕ +
(rn − R2n
rn
)bn sin nϕ
Zur Bestimmung der Koeffizienten an und bn gehen wir von einer Fourier Entwicklung
G(ϕ) =∞
X
n=1
(en cos nϕ + fn sin nϕ
)fur 0 ≤ ϕ ≤ 2π
aus. Ein Koeffizientenvergleich liefert unmittelbar
an =(%n − R2n
%n
)−1en, bn =
(%n − R2n
%n
)−1fn fur n = 1, 2, . . .,
und man erhalt dann
U (r, ϕ) =∞
X
n=1
(rn − R2n
rn
%n − R2n
%n
)(en cos nϕ + fn sin nϕ
). (4.32)
Die Fourierkoeffizienten der Funktion G haben die Form
en :=1π
Z 2π
0G(θ) cosnθ dθ, fn :=
1π
Z 2π
0G(θ) sinnθ dθ
fur n = 1, 2, . . .,
und e0 :=12π
∫ 2π
0G(θ) dθ = 0 wird zusatzlich vorausgesetzt. Dies in (4.32) eingesetzt liefert
U (r, ϕ)
=1π
∞X
n=1
(rn − R2n
rn
%n − R2n
%n
)( Z 2π
0G(θ) cosnθ cosnϕdθ +
Z 2π
0G(θ) sinnθ sinnϕdθ
)
=1π
∞X
n=1
(rn − R2n
rn
%n − R2n
%n
) Z 2π
0G(θ) cosn(θ − ϕ) dθ
=1π
Z 2π
0G(θ)
( ∞X
n=1
(rn − R2n
rn
%n − R2n
%n
)
cosn(θ − ϕ)
)
dθ.
4.5 Die Poisson–Gleichung in der Ebene
4.5.1 Gaußscher Integralsatz und Greensche Formeln in der Ebene
Im Folgenden bezeichne
F = F (x, y ) =
F1(x, y )
F2(x, y )
fur (x, y ) ∈ D
ein differenzierbares Vektorfeld und D ⊂ R2 eine offene beschrankte Menge mit einem stuckweise glatten
Rand. Der Gaußsche Integralsatz besagtZ Z
DdivF dx dy =
Z
∂DF · nds,
wobei n = n(x, y ) den außeren Normalenvektor bezeichnet, und
divF =∂F1
∂x+
∂F2
∂y
ist die Divergenz des Vektorfeldes F .

58 Kapitel 4 Die Poissongleichung
Im Fall
F = v∇ugilt
divF = v∆u + ∇v · ∇u = v(
∂2u
∂x2 +∂2u
∂y2
)
+(∂v
∂x
∂u
∂x+
∂v
∂y
∂u
∂y
)
.
Mit der Darstellung∂u
∂n= ∇u · n
erhalt man die IdentitatZ Z
D
(v∆u + ∇v · ∇u
)dx dy =
Z
∂Dv∂u
∂nds.
Diese Gleichung bezeichnet man als erste Greensche Formel.
Proposition 4.4 Sie u : D → R eine stetige Funktion die auf D zweimal stetig differenzierbar ist. Dann
giltZ Z
D∆u dx dy =
Z
∂D
∂u
∂nds.
Insbesondere gilt fur eine harmonische Funktion u : D → RZ
∂D
∂u
∂nds = 0.
BEWEIS. Folgt direkt aus der ersten Greenschen Formel angewandt mit v ≡ 1.
Die erste Greensche Identitat umgeschrieben liefertZ Z
Dv∆u dx dy = −
Z Z
D(∇v · ∇u) dx dy +
Z
∂Dv∂u
∂nds.
Eine Vertauschung der Funktionen u und v ergibt unmittelbarZ Z
Du∆v dx dy = −
Z Z
D(∇v · ∇u) dx dy +
Z
∂Du∂v
∂nds.
Eine Subtraktion dieser beiden Identitaten ergibt dannZ Z
D(u∆v − v∆u) dx dy =
Z
∂D
(
u∂v
∂n− v
∂u
∂n
)
ds.
Diese Gleichung bezeichnet man als zweite Greensche Formel.
4.5.2 Dirichlet-Randdaten
Betrachte die Poisson Gleichung
−∆u = f auf D, u = 0 auf ∂D. (4.33)
Mit der Notation
L = −∆,
C20 (D) = v : D → R : v ∈ C2(D), v ∈ C(D ), v = 0 auf ∂D
lasst sich die Poisson Gleichung als Operatorgleichung
gesucht u ∈ C20 (D) mit Lu = f

Abschnitt 4.5 Die Poisson– Gleichung in der Ebene 59
schreiben. Es wird noch das Skalarprodukt
〈〈u, v 〉〉 =Z Z
Duv dx dy
eingefuhrt.
Theorem 4.5 (a) Der Operator L : C20 (D) → C(D ) ist symmetrisch:
〈〈Lu, v 〉〉 = 〈〈u,Lv 〉〉 fur u, v ∈ C20 (D).
(b) Der Operator L ist positiv definit:
〈〈Lu, u〉〉 ≥ 0 fur u ∈ C20 (D),
wobei Gleichheit nur fur u ≡ 0 eintritt.
BEWEIS. Die zweite Greensche Formel liefert hierZ Z
D(u∆v − v∆u) dx dy = 0,
was gleichbedeutend mit der Symmetrie ist. Die erste Greensche Formel liefert
−Z Z
Du∆u dx dy =
Z Z
D∇u · ∇u dx dy =
Z Z
D
(∂u
∂x
)2
+(∂u
∂y
)2
dx dy
beziehungsweise
〈〈Lu, u〉〉 =Z Z
D
(∂u
∂x
)2
+(∂u
∂y
)2
dx dy ≥ 0 fur u ∈ C20 (D).
Im Fall 〈〈Lu, u〉〉 = 0 mussen also die partiellen Ableitungen ∂u∂x
und ∂u∂y
verschwinden und daher die
Funktion u auf der Menge D konstant sein. Wegen der Nullrandbedingungen fur u folgt daraus u ≡ 0 auf
D.
Eine unmittelbare Konsequenz ist Eindeutigkeit der Losung des folgenden Dirichel-Problems fur die Pois-
son Gleichung
−(∆u)(x, y ) = f (x, y ) fur (x, y ) ∈ D,u(x, y ) = ϕ(x, y ) fur (x, y ) ∈ ∂D
(4.34)
mit vorgegebenen stetigen Funktionen f : D → R und ϕ : ∂D → R.
Theorem 4.6 (Eindeutigkeitssatz ) Es gibt hochstens eine stetige Funktion u : D → R, die auf D zweimal
stetig differenzierbar ist und eine Losung des Dirichlet-Problems (4.34) fur die Poisson Gleichung darstellt.
BEWEIS. Seien u1 : D → R und u2 : D → R zwei Losungen mit den im Theorem genannten Stetigkeits-
und Differenzierbarkeitseigenschaften. Dann ist die Differenz u = u1 − u2 eine harmonische Funktion, die
auf dem Rand ∂G verschwindet. Also ist u ∈ C 20 (D) und es gilt Lu = 0 und damit auch 〈〈Lu, u〉〉 = 0.
Nach Theorem 4.5 gilt dann u ≡ 0 beziehungsweise u1 ≡ u2.

60 Kapitel 4 Die Poissongleichung
4.5.3 Neumann-Randdaten
Betrachte nun die Poisson Gleichung mit Neumann-Randdaten:
−∆u = f auf D, ∂u
∂n= 0 auf ∂D. (4.35)
Mit der Notation
L = −∆,
C2n,0(D) =
v : D → R : v ∈ C2(D), v ∈ C1(D ),∂v
∂n= 0 auf ∂D
lasst sich das vorliegende Problem als Operatorgleichung
gesucht u ∈ C2n,0(D) mit Lu = f
schreiben.
Theorem 4.7 (a) Der Operator L : C2n,0(D) → C(D ) ist symmetrisch:
〈〈Lu, v 〉〉 = 〈〈u,Lv 〉〉 fur u, v ∈ C2n,0(D).
(b) Der Operator L ist positiv semidefinit:
〈〈Lu, u〉〉 ≥ 0 fur u ∈ C2n,0(D),
wobei Gleichheit nur fur konstante Funktionen u eintritt.
BEWEIS. Die Vorgehensweise ist die Gleiche wie beim Beweis von Theorem 4.5. Die zweite Greensche
Formel liefert hierZ Z
D(u∆v − v∆u) dx dy = 0,
was gleichbedeutend mit der Symmetrie ist. Die erste Greensche Formel liefert
−Z Z
Du∆u dx dy =
Z Z
D∇u · ∇u dx dy =
Z Z
D
(∂u
∂x
)2
+(∂u
∂y
)2
dx dy
beziehungsweise
〈〈Lu, u〉〉 =Z Z
D
(∂u
∂x
)2
+(∂u
∂y
)2
dx dy ≥ 0 fur u ∈ C2n,0(D).
Im Fall 〈〈Lu, u〉〉 = 0 mussen also die partiellen Ableitungen ∂u∂x
und ∂u∂y
verschwinden und daher die
Funktion u auf der Menge D konstant sein.
Wir betrachten nun das Neumannproblem fur die Poisson Gleichung
−(∆u)(x, y ) = f (x, y ) fur (x, y ) ∈ D,∂u
∂n(x, y ) = ϕ(x, y ) fur (x, y ) ∈ ∂D,
Z
∂Du ds = 0
(4.36)
mit vorgegebenen stetigen Funktionen f : D → R und ϕ : ∂D → R.
Theorem 4.8 (Eindeutigkeitssatz )

Abschnitt 4.6 Mittelwerteigenschaft harmonischer Funktionen 61
(a) Es gibt hochstens eine stetige Funktion u : D → R, die auf D zweimal stetig differenzierbar ist und
eine Losung des Neumann-Problems (4.34) fur die Poisson Gleichung darstellt.
(b) Ein notwendiges Kriterium fur Losbarkeit von (4.34) ist
−Z Z
Df dx dy =
Z
∂Dϕds.
BEWEIS. Seien u1 : D → R und u2 : D → R zwei Losungen mit den im Theorem genannten Stetigkeits-
und Differenzierbarkeitseigenschaften. Dann ist die Differenz u = u1 − u2 eine harmonische Funktion,
deren Normalableitungen auf dem Rand ∂G verschwinden. Also ist u ∈ C 2n,0(D) und es gilt Lu = 0 und
damit auch 〈〈Lu, u〉〉 = 0. Nach Theorem 4.5 ist dann u ≡ c und damit∫
∂Du ds = c
∫
∂Du ds = 0.
Daraus folgt c = 0. Die zweite Aussage des Theorems folgt unmittelbar aus Proposition 4.4.
4.6 Mittelwerteigenschaft harmonischer Funktionen
Die Mittelwerteigenschaft harmonischer Funktionen soll zunachst am eindimensionalen Fall erlautert wer-
den. Hierzu sei u : [a, b ] → R eine Funktion mit
u(x) = c1 + c2x fur x ∈ [a, b ]
mit Koeffizienten c1, c2 ∈ R. Man beachte, dass dies genau die Klasse der dem auf dem Intervall [a, b ]
harmonischen Funktionen auf liefert. Fur x ∈ [a, b ] und eine Zahl r > 0 mit x± r ∈ [a, b ] gilt dann
12(u(x− r) + u(x+ r)) = c1 + c2
(12(x− r) + 1
2(x+ r)
)= u(x).
Der Wert u(x) stimmt also mit dem Mittelwert der beiden Werte u(x − r) und u(x + r) uberein. Diese
Eigenschaft gilt auch in mehreren Dimensionen.
Hierzu sei D ⊂ R2 eine offene beschrankte Menge. Fur x = (x1, x2 ) ∈ R
2 definieren wir
B(x; r) = y ∈ R2 : |x− y |2 < r,
die offene Kugel um den Punkt x mit Radius r.
Theorem 4.9 Sei u : D → R eine stetige, auf D zweimal stetig differenzierbare Funktion. Sei x ∈ D und
r > 0 mit der Eigenschaft B(x; r) ⊂ D.
(a) Falls ∆u ≥ 0 auf D erfullt ist, so gilt
u(x) ≤ 12πr
Z
|x−y |2=ru(y ) ds.
(b) Im Fall ∆u ≤ 0 auf D gilt
u(x) ≥ 12πr
Z
|x−y |2=ru(y ) ds.
BEWEIS. Es genugt, den Fall (a) zu betrachten. Der Teil (b) folgt dann mit Teil (a) angewandt auf die
Funktion −u. Wir betrachten Polarkoordinaten und setzen
U (%, ϕ) = u(y ) mit y = (x+ % cosϕ, x+ % sinϕ).

62 Kapitel 4 Die Poissongleichung
Damit ist
u(x) ≤ 12π
Z 2π
0U (r, ϕ) dϕ (4.37)
zu zeigen. Hierzu betrachtet man die Funktion
M (%) =12π
Z π
−πU (%, ϕ) dϕ fur 0 < % ≤ r.
Sicher gilt aus Stetigkeitsgrunden
max0≤ϕ≤2π
|u(x) − U (%, ϕ) | → 0 fur %→ 0
und damit
M (%) → u(x) fur %→ 0. (4.38)
Außerdem folgt aus Proposition 4.4 unmittelbar
M ′(ρ) =12π
Z 2π
0
∂U
∂%(%, ϕ) dϕ
(∗)=
12π%
Z
|x−y |2=%
∂u
∂n(y ) ds
=1
2π%
Z
B(x;% )∆u(y ) dy ≥ 0, (4.39)
die Funktion M ist also monoton wachsend. Hierbei ergibt sich die Identitat (∗) aus der folgenden Rech-
nung:∂U
∂%(%, ϕ) =
∂u
∂x1(y ) cosϕ +
∂u
∂x2(y ) sinϕ = ∇u(y ) · n(y ) =
∂u
∂n(y ).
Die Aussage (4.37) und damit auch die Aussage des Theorems folgt nun unmittelbar aus den beiden Aussa-
gen (4.38) und (4.39).
4.7 Maximumprinzip und Folgerungen
Im Folgenden sei D ⊂ Rd ein beschrankte offene Menge. Die Mittelwerteigenschaft, die sich auch fur
hoherdimensionale Raume formulieren lasst, kann zur Herleitung von Maximumprinzipien verwendet wer-
den (Ubungsaufgabe). Diese Prinzipien sollen nun vorgestellt werden, die Herleitung geschieht allerdings
auf andere Weise.
Theorem 4.10 (Minimum-Maximum-Prinzip ) Sei u : D → R eine stetige Funktion, die auf D zweimal
stetig differenzierbar ist.
Falls ∆u ≥ 0 auf D erfullt ist, so nimmt die Funktion u ihr Maximum auf dem Rand ∂D an.
.................... ∆u ≤ 0 ..........
.......... Minimum ....................
BEWEIS. Fur den Nachweis der ersten Teilaussage betrachtet man fur beliebiges ε > 0 hilfsweise die
Funktion
v(ε)(x) := u(x) + ε |x|2 fur x ∈ D,fur die insbesondere
∆v(ε)(x) = ∆u(x) + 2εd ≥ 2εd fur x ∈ D (4.40)
gilt. Damit muss die Funktion v(ε) ihr Maximum auf dem Rand von D annehmen. Wurde namlich die
Funktion v(ε) in einem inneren Punkt x von D ihr Maximum annehmen, so ware notwendigerweise die

Abschnitt 4.7 Maximumprinzip und Folgerungen 63
Hessematrix von v in diesem Punkt x negativ definit und damit insbesondere
∆v(ε)(x) ≤ 0
im Widerspruch zur Eigenschaft (4.40). Es wird nun uber den Grenzubergang ε → 0 nachgewiesen, dass
auch die Funktion u ihr Maximum auf dem Rand ∂D annimmt. Hierzu berechnet man
maxx∈D
u(x) ≤ maxx∈D
v(ε)(x) = maxx∈∂D
v(ε)(x) ≤
εmaxx∈D
|x|22
+ maxx∈∂D
u(x).
Der Grenzubergang ε → 0 zeigt nun, dass auch die Funktion u ihr Maximum auf dem Rand ∂D annimmt.
Die Aussage uber das Minimum erhalt man durch Anwendung des Maximumprinzips auf die Funktion −u,
denn diese erfullt dann ∆(−u) = −∆u ≥ 0 auf D und es gilt daher
minx∈D
u(x) = −maxx∈D
(−u)(x) = −maxx∈∂D
(−u)(x) = minx∈∂D
u(x).
Korollar 4.11 Sei u : D → R eine stetige Funktion, die auf D zweimal stetig differenzierbar ist.
(a) Falls ∆u ≤ 0 auf D und u ≥ 0 auf ∂D erfullt ist, so gilt u ≥ 0 auf D.
(b) Falls ∆u ≥ 0 auf D und u ≤ 0 auf ∂D erfullt ist, so gilt u ≤ 0 auf D.
Es werden nun einige einfache aber wichtige Folgerungen aus dem Minimum-Maximum-Prinzip angegeben.
Wir betrachten zunachst das Dirichletproblem fur die Poisson Gleichung
(∆u)(x) = f (x) fur x ∈ D,u(x) = ϕ(x) fur x ∈ ∂D
(4.41)
mit vorgegebenen stetigen Funktionen f : D → R und ϕ : ∂D → R.
Theorem 4.12 (Eindeutigkeitssatz ) Es gibt hochstens eine stetige Funktion u : D → R, die auf D zweimal
stetig differenzierbar ist und eine Losung des Dirichlet-Problems (4.41) fur die Poisson Gleichung darstellt.
BEWEIS. Seien u1 : D → R und u2 : D → R zwei Losungen mit den im Theorem genannten Stetigkeits-
und Differenzierbarkeitseigenschaften. Dann ist die Differenz u = u1 − u2 eine harmonische Funktion, die
auf dem Rand ∂D verschwindet. Nach Theorem 4.10 nimmt die Funktion u sowohl ihr Maximum als auch
ihr Minimum auf dem Rand ∂D an, so dass notwendigerweise u = 0 auf D gilt.
Theorem 4.13 (Stetige Abhangigkeit von den Randdaten ) Seien u, uδ : D → R stetige Funktionen, die
auf D zweimal stetig differenzierbar sind. Die Funktion u sei eine Losung des Dirichlet-Problems (4.41),
und die Funktion uδ sei eine Losung des Dirichlet-Problems
(∆uδ )(x) = f (x) fur x ∈ D, uδ(x) = ϕδ(x) fur x ∈ ∂D.Dann gilt
|uδ(x) − u(x)| ≤ maxξ∈∂D
|ϕδ(ξ ) − ϕ(ξ )| fur x ∈ D.

64 Kapitel 4 Die Poissongleichung
BEWEIS. Die Differenz u = u1 − u2 ist eine harmonische Funktion auf D, und auf dem Rand ∂D gilt
minξ∈∂D
ϕδ(ξ ) − ϕ(ξ ) ≤ uδ(x) − u(x) ≤ maxξ∈∂D
ϕδ(ξ ) − ϕ(ξ ) fur x ∈ ∂D.
Die allgemeinen Aussagen −|z | ≤ z ≤ |z | fur z ∈ R, sowie inf ξ −g(ξ ) = −maxξ g(ξ ) und die Implikati-
on “−|z | ≤ y ≤ |z | =⇒ |y | ≤ |z |“ fur reelle Zahlen liefern nun die Aussage des Theorems.
Wir betrachten noch die Poisson Gleichung fur ein Ganzraumproblem,
(∆u)(x) = f (x) fur x ∈ Rd,
u(x) → 0 fur |x|2 → ∞,(4.42)
mit einer vorgegebenen stetigen Funktionen f : Rd → R.
Theorem 4.14 (Eindeutigkeitssatz ) Es gibt hochstens eine zweimal stetig differenzierbare Losung u :
Rd → R des Problems (4.42).
BEWEIS. Seien u1 : D → R und u2 : D → R zwei Losungen mit den im Theorem genannten Stetigkeits-
und Differenzierbarkeitseigenschaften. Dann ist die Differenz u = u1 − u2 eine harmonische Funktion mit
der Eigenschaft u(x) → 0 fur |x|2 → ∞. Fur ein beliebiges ε > 0 gibt es dann ein R ≥ 0 mit
|u(x)| ≤ ε fur |x|2 ≥ R.
Das Maximumprinzip liefert auch
|u(x)| ≤ ε fur |x|2 ≤ R
und damit
|u(x)| ≤ ε fur x ∈ Rd.
Der Grenzubergang ε→ 0 liefert u ≡ 0 beziehungsweise u1 ≡ u2.
4.8 Greensche Funktionen
4.8.1 Darstellungssatze
Dreidimensionaler Fall
Sei D ⊂ R3 ein beschrankte offene Menge mit einem stuckweise glatten Rand. Sei u : D → R
eine Funktion, die auf D zweimal stetig differenzierbar ist.(4.43)
Theorem 4.15 (Darstellungstheorem, d = 3 ) Mit den Annahmen aus (4.43) gilt fur jedes x ∈ Du(x) =
14π
Z
∂D
1
|x − y |2∂
∂nu(x) − u(y )
∂
∂n
1
|x − y |2
dσ − 14π
Z
D
∆u(y )
|x − y |2 dy.
BEWEIS. Zuerst wahlt man ε > 0 hinreichend klein, so dass

Abschnitt 4.8 Greensche Funktionen 65
B(x; ε) ⊂ Dgilt und betrachtet dann die Menge
Dε = D\B(x; ε).
Die Funktion
v(y ) =1
|x − y |2ist harmonisch auf Dε. Die zweite Greensche Formel, die auch in R
3 gilt, liefert dann
−Z
Dε
∆u(y )
|x − y |2 dy =Z
∂D
u(y )∂
∂n
1
|x − y |2 − 1
|x − y |2∂
∂nu(y )
dσ
+Z
∂B(x;ε )
....................
dσ. (4.44)
Diese Darstellung gilt fur alle hinreichend kleinen Werte von ε, und die Aussage des Theorems wird nun
uber den Grenzubergang ε nachgewiesen. Es gilt
Z
Dε
∆u(y )
|x − y |2 dy →Z
D
∆u(y )
|x − y |2 dy fur ε→ 0, (4.45)
wobei berucksichtigt ist, dass das Integral auf der rechten Seite der Identitat (4.45) existiert. Das erste
Integral auf der rechten Seite von (4.44) hangt nicht von ε ab. Es verbleibt nachzuweisen, dassZ
∂B(x;ε )
u(y )∂
∂n
1
|x − y |2 − 1
|x − y |2∂
∂nu(y )
dσ → 4πu(x) fur ε→ 0
gilt. Es gilt1
|x − y |2 =1ε
∂
∂n
1
|x − y |2 =1
ε2 fur y ∈ ∂B(x; ε),
und daher
Z
∂B(x;ε )
u(y )∂
∂n
1
|x − y |2 − 1
|x − y |2∂
∂nu(y )
dσ =Z
∂B(x;ε )
1
ε2u(y ) − 1ε
∂
∂nu(y )
dσ
=Z
∂B(x;ε )
1
ε2u(x) dσ
︸ ︷︷ ︸
= 4πu(x)
+Z
∂B(x;ε )
1
ε2 (u(y ) − u(x)) − 1ε
∂
∂nu(y )
dσ.
Schließlich erhalt man
∣∣∣
Z
∂B(x;ε )
1
ε2 (u(y ) − u(x)) − 1ε
∂
∂nu(y )
dσ∣∣∣
≤ 1
ε2
Z
∂B(x;ε )|u(y ) − u(x)| dσ +
1ε
Z
∂B(x;ε )
∣∣ ∂
∂nu(y )
∣∣ dσ
≤ 4π maxy∈∂B(x;ε )
|u(y ) − u(x)| + 4πεmaxy∈D
|∇u(x)|2 → 0 fur ε→ 0
auf Grund der Stetigkeit der Abbildung u und der Beschranktheit von ∇u auf der Menge D.
Sei D ⊂ R2 ein beschrankte offene Menge mit einem stuckweise glatten Rand. Sei u : D → R
eine Funktion, die auf D zweimal stetig differenzierbar ist.(4.46)

66 Kapitel 4 Die Poissongleichung
Zweidimensionaler Fall
Theorem 4.16 (Darstellungstheorem, d = 2 ) Mit den Annahmen aus (4.46) gilt fur jedes x ∈ Du(x) =
12π
Z
∂D
log1
|x − y |2∂
∂nu(y ) − u(y )
∂
∂nlog
1
|x − y |2
dσ − 12π
Z
D∆u(y ) log
1
|x − y |2 dy.
BEWEIS. Wie fur Theorem 4.15.
Bemerkung 4.17 Solche Darstellungen existieren auch in Rd fur d ≥ 4, mit den Funktionen
v(y ) = log1
|x − y |2 .
4.8.2 Losung des Dirichletproblems f ur die Laplacegleichung mittels Greenscher Funktio-nen
Dreidimensionaler Fall
In der Situation (4.43) folgt fur harmonische Funktionen u aus Theorem 4.15
u(x) =14π
Z
∂D
1
|x − y |2∂
∂nu(y ) − u(y )
∂
∂n
1
|x − y |2
dσ fur x ∈ D. (4.47)
Wir suchen nun fur x ∈ D nach einer von x abhangigen Funktion h : D → R, die auf D zweimal stetig
differenzierbar und auf D harmonisch ist. Die zweite Greensche Formel liefert dann
0 =Z
∂D
h(y )∂
∂nu(y ) − u(y )
∂
∂nh(y )
dσ. (4.48)
Addition der Identitaten (4.47) und (4.49) und liefert
u(x) =Z
∂D
14π
1
|x − y |2 + h(y )
∂
∂nu(y )dσ −
Z
∂D
u(y )∂
∂n
[14π
1
|x − y |2 + h(y )
]
dσ (4.49)
fur x ∈ D.
Fordert man nun h(y ) = − 14π
1/|x− y |2 auf ∂D, so erhalt man aus (4.49) die Darstellung
u(x) = −Z
∂Du(y )
∂
∂n
14π
1
|x − y |2 + h(y )
dσ fur x ∈ D. (4.50)
Wir fassen zusammen:
Fur jedes x ∈ D sei h(x, ·) : D → R eine auf D zweimal stetig differenzierbare Funktion mit
∆yh(x, y ) = 0 fur y ∈ D,h(x, y ) = − 1
4π1
|x − y |2 fur y ∈ ∂D.
(4.51)
Definition 4.18 Gelte (4.43) und (4.51). Die Funktion
G(x, y ) =14π
1
|x − y |2 + h(x, y ) fur x, y ∈ D, x 6= y
heißt Greensche Funktion fur das Dirichletproblem zum Gebiet D ⊂ R3 .

Abschnitt 4.8 Greensche Funktionen 67
Mit der Greenschen Funktion wird aus (4.50)
u(x) = −Z
∂D
u(y )∂
∂nG(x, y )
dσ fur x ∈ D. (4.52)
Die Losung des Dirichletproblems
∆u(x) = 0 fur x ∈ D,u(x) = ϕ(x) fur x ∈ ∂D
(4.53)
ist damit im Fall u ∈ C2(D) durch
u(x) = −Z
∂D
ϕ(y )∂
∂nG(x, y )
dσ fur x ∈ D (4.54)
gegeben.
Zweidimensionaler Fall
Fur jedes x ∈ D sei h(x, ·) : D → R eine auf D zweimal stetig differenzierbare Funktion mit
∆yh(x, y ) = 0 fur y ∈ D,h(x, y ) = − 1
2πlog
1
|x − y |2 fur y ∈ ∂D
fur x ∈ D.
(4.55)
Definition 4.19 Gelte (4.46) und (4.55). Die Funktion
G(x, y ) =12π
log1
|x − y |2 + h(x, y ) fur x, y ∈ D, x 6= y
mit der Funktion h aus (4.55) heißt Greensche Funktion fur das Dirichletproblem zum Gebiet D ⊂ R2 .
Mit der Greenschen Funktion erhalt man im Fall u ∈ C 2(D ) die Darstellung
u(x) = −Z
∂D
ϕ(y )∂
∂nG(x, y )
dσ fur x ∈ D (4.56)
als Losung des Dirichletproblems (4.53) mit D ⊂ R2.

68 Kapitel 4 Die Poissongleichung
4.8.3 Greensche Funktion f ur die dreidimensionale Kugel
In einfachen Fallen lassen sich Greensche Funktionen angeben. betrachtet werden.
Proposition 4.20 Im Fall D = B(0;R) ⊂ R3 gilt
h(x, y ) = − 14π
1∣∣ R
|y |2 y − |y |2Rx∣∣2
fur x, y ∈ B(0;R) mit x 6= y.
BEWEIS. Ubungsaufgabe.
Damit erhalt man
G(x, y ) =14π
(1
|y − x|2− 1
∣∣ R
|y |2 y − |y |2Rx∣∣2
)
=:14π
( 1s1
− 1s2
)
mit
s1 = |y − x|2 =(|y |22 + |x|22 − 2|y |2|x|2 cos θ
)1/2
s2 =∣∣ R
|y |2 y − |y |2Rx∣∣2
=(R +
|y |22R2 |x|22 − 2|y |2|x|2 cos θ
)1/2.
Hierbei bezeichnet 0 ≤ θ ≤ π den Winkel zwischen den Vektoren x und y. Fur |y |2 = R berechnet man
dann∂
∂nG(x, y ) =
14πR
R2 − |x |22(R2 + |x |2 − 2R|x |2 cos θ )3/2
und erhalt fur das Dirichletproblem (4.53) fur das Gebiet D = B(0;R) ⊂ R2 die Losung in Form des
Poissonintegrals
u(x) =1
4πR
Z
∂B( 0;R )
(R2 − |x |22 )ϕ(y )
(R2 + |x |2 − 2R|x |2 cos θ )3/2dσ fur x ∈ D.
4.8.4 Losung des Dirichletproblems f ur die Potentialgleichung mittels Greenscher Funktio-nen
Dreidimensionaler Fall
Wir betrachten nun das Dirichletproblem fur die Poisson Gleichung,
∆u(x) = f (x) fur x ∈ D,u(x) = ϕ(x) fur x ∈ ∂D.
(4.57)
Theorem 4.21 Die Losung u des Dirichletproblems (4.57) fur die Poisson Gleichung besitzt im Fall u ∈C2(D ) die Darstellung
u(x) = −Z
D
f (y )G(x, y )
dσ −Z
∂D
ϕ(y )∂
∂nG(x, y )
dσ fur x ∈ D. (4.58)

Abschnitt 4.8 Greensche Funktionen 69
BEWEIS. Man zerlegt das Problems in die beiden Teilprobleme
∆u1(x) = 0 fur x ∈ D, u1(x) = ϕ(x) fur x ∈ ∂D (4.59)
sowie
∆u2(x) = f (x) fur x ∈ D, u2(x) = 0 fur x ∈ ∂D. (4.60)
Die Losung des Teilproblems (4.59) besitzt gemaß (4.54) die Darstellung
u1(x) = −Z
∂D
ϕ(y )∂
∂nG(x, y )
dσ fur x ∈ D (4.61)
Das Darstellungstheorem liefert außerdem fur x ∈ D die Darstellung
u2(x) = −Z
D
..................................................................................... u2(y )︸ ︷︷ ︸
= f (y )
14π
1
|x − y |2
dy +14π
Z
∂D
1
|x − y |2∂
∂nu2(y ) − u2(y )
︸ ︷︷ ︸
= 0
∂
∂n
1
|x − y |2
dσ.
(4.62)
Die zweite Greensche Formel liefert außerdemZ
Dh(y ) ................
..................................................................... u2(y )︸ ︷︷ ︸
= f (y )
dy =Z
∂D
h(y )∂
∂nu2(y ) − u2(y )
︸ ︷︷ ︸
= 0
∂
∂nh(y )
dσ (4.63)
Addition der Identitaten (4.62) und (4.63) liefert dann
u2(x) = −Z
Df (y )G(x, y ) dσ fur x ∈ D. (4.64)
Die Aussage des Theorems folgt nun wegen u = u1 + u2 aus den Darstellungen (4.61) und (4.64).
Zweidimensionaler Fall
Geht genauso wie der dreidimensionale Fall.
4.8.5 Eigenschaften Greenscher Funktionen
Dreidimensionaler Fall
Theorem 4.22 Fur die Greensche Funktion zu einem Gebiet D ⊂ R3 gilt G(x, y ) ≥ 0 fur x, y ∈ D mit
x 6= y.
BEWEIS. Sei x ∈ D fest gewahlt. Als Erstes halten wir fest, dass nach dem Minimumprizip fur die Funktion
h gilt
4πh(x, y ) ≥ minz∈∂D
− 1
|x − z |2
= −maxz∈∂D
1
|x − z |2 = − 1
maxz∈∂D
|x − z |2 =: −K
und fur die Konstante K gilt 0 < K < ∞. Sei nun auch y ∈ D mit x 6= y fest gewahlt. Dann iwahlt man
ε > 0 so klein, dass
ε <1K, ε < |x− y |2, B(x; ε) ⊂ D.
Die Funktion G(x, ·) ist harmonisch auf der offenen beschrankten Menge Dε = D\B(x; ε) ⊂ D. Das
Minimumprinzip fur G(x, ·) angewendet auf Dε liefert wegen G(x, ·) ≡ 0 auf ∂D Folgendes,
G(x, y ) ≥ 14π
(
minz∈∂B(x;ε )
1
|x − z |2 − K)
=14π
( 1ε−K
)≥ 0.
Dies komplettiert den Beweis.

70 Kapitel 4 Die Poissongleichung
4.9 Die Laplace–Gleichung f ur den Kreissektor
Wir betrachten im Folgenden ein Dirichlet-Randwertproblem fur die Laplace Gleichung auf einem Kreis-
sektor mit Offnungswinkel π/b, Radius R ≥ 0 und Mittelpunkt im Ursprung. In Polarkoordinatendarstel-
lung (4.9) hat es die Form
∂2U
∂r2 +1r
∂U
∂r+
1
r2
∂2U
∂ϕ2 , = 0 fur 0 ≤ r ≤ rmax, 0 ≤ ϕ ≤ π/b (4.65)
U (rmax, ϕ) = G(ϕ) fur 0 ≤ ϕ ≤ π/b, (4.66)
U (r, 0) = U (r, π/b) = 0 fur 0 ≤ r ≤ rmax. (4.67)
Eine Familie von Losungen der Differenzialgleichung (4.65) wird mit dem Separationsansatz
U (r, ϕ) = R(r)Φ(ϕ) fur 0 ≤ r ≤ rmax, 0 ≤ ϕ ≤ π/b
gewonnen. Aus (4.65) erhalt man so wie beim Kreis die separierten Gleichungen
Φ ′′ + λΦ = 0 fur 0 ≤ ϕ ≤ π/b, (4.68)
r2R ′′ + rR ′ − λR = 0 fur 0 ≤ r ≤ rmax (4.69)
mit einem noch zu spezifizierenden Separationsparameter λ. Dazu gehoren dann noch die Randbedingungen
Φ(0) = Φ(π/b) = 0. (4.70)
Bei (4.68), (4.70) handelt es sich um ein Eigenwertproblem fur eine gewohnliche Differenzialgleichung
zweiter Ordnung mit Nullrandbedingungen. Die Eigenwerte und zugehorigen Eigenfunktionen lauten
λn = (bn)2, Φn(ϕ) = sin (nbϕ) fur n = 1, 2, . . . .
Losungen der gewohnlichen Differenzialgleichung (4.69) erhalt man in der Form
Rn(r) = rbn fur n = 1, 2, . . . .
Superposition ergibt dann
U (r, ϕ) =∞
X
n=1
anrbn sin (nbϕ) (4.71)
mit noch an die Randbedingungen anzupassenden Koeffizienten an. Hierzu gehen wir von einer Fourier
Entwicklung
G(ϕ) =∞
X
n=1
bn sin (nbϕ) fur 0 ≤ ϕ ≤ π/b (4.72)
aus. Ein Koeffizientenvergleich liefert unmittelbar
an = r−bnmax bn fur n = 1, 2, . . .,
und (4.71) geht dann uber in
U (r, ϕ) =∞
X
n=1
( rrmax
)bnbn sin (nbϕ) fur 0 ≤ ϕ ≤ π/b, 0 ≤ r ≤ rmax. (4.73)
Die Fourierentwicklung fur die Funktion G von der speziellen Form (4.73) erhalt man wie ublich durch
ungerade Fortsetzung von G auf das Intervall [−π/b, 0].

Abschnitt 4.10 Der Separationsansatz f ur die Laplace– Gleichung auf beschr ankten Rechteckgebieten 71
4.9.1 Einspringende Ecken
Fur b < 1 ist die Losung U aus (4.73) im Fall b1 6= 0 nicht stetig differenzierbar. Hierzu betrachtet man in
(4.73) den ersten Summanden (o.B.d.A. sei b1 = 1 und rmax = 1)
U1(r, ϕ) = rb sin (bϕ) fur 0 ≤ ϕ ≤ π/b, 0 ≤ r ≤ rmax.
Hier gilt∂
∂rU1(r, ϕ) = brb−1 sin (bϕ) fur 0 ≤ ϕ ≤ π/b, 0 < r ≤ rmax,
so dass∂
∂rU1(r, ϕ) → ∞ fur r → 0.
Allgemein verhalt es sich so, dass Gebiete mit einspringenden Ecken zu Singularitaten in der Ableitung der
Losung fuhren konnen.
4.10 Der Separationsansatz f ur die Laplace–Gleichung auf beschranktenRechteckgebieten
Wir betrachten im Folgenden das zweidimensionale Rechteck
[0, L] × [0,M ] ⊂ R2
mit 0 < L <∞ und 0 < M <∞. Ziel der nachfolgenden Betrachtungen ist die Bestimmung von Losungen
u : [0, L] × [0,M ] → R der Laplace Gleichung von der Form
u(x, y ) = X(x)Y (y ) fur x ∈ (0, L), y ∈ (0, M ) (4.74)
mit zweimal stetig differenzierbaren Funktionen X : [0, L] → R und Y : [0,M ] → R. Der Ansatz (4.74)
fuhrt auf
(∆u)(x, y ) = X ′′(x)Y (y ) + X(x)Y ′′(y )!= 0 fur x ∈ (0, L), y ∈ (0, M ).
Dies bedeutet
X ′′(x)
X(x)= −Y ′′(y )
Y (y )fur x ∈ (0, L), y ∈ (0, M ). (4.75)
Fur den Moment sei hierbei X (x) 6= 0 fur x ∈ [0, L] und Y (y ) 6= 0 fur y ∈ [0,M ] angenommen, wobei
man diese Restriktion spater auch wieder fallen lassen kann. Vergleichbar der Situation in (1.19) fuhrt dies
auf die Bedingungen
X ′′(x)
X(x)= −Y ′′(y )
Y (y )= −s2 fur x ∈ (0, L), y ∈ (0, M ) (4.76)
mit einer noch zu spezifizierenden reellen Konstanten s2 > 0. Denkbar ware hier auch die Zulassung po-
sitiver Konstanten s bei gleichzeitigem Verzicht der Quadratbildung moglich. Wahrend der weiteren Rech-
nungen stellt sich jedoch heraus, dass sich damit keine weiteren Losungen gewinnen lassen. Daher werden
die Betrachtungen gleich auf negative Konstanten −s2 beschranken, wobei sich durch die Verwendung von
s2 > 0 anstelle von s > 0 die Notation vereinfachen wird. Die Darstellung (4.76) fuhrt unmittelbar auf die
beiden Gleichungen
X ′′(x) + s2X(x) = 0 fur x ∈ (0, L),
Y ′′(y ) − s2Y (y ) = 0 fur y ∈ (0, M ).

72 Kapitel 4 Die Poissongleichung
Die allgemeinen Losungen dieser gewohnlichen Differenzialgleichungen sind von der Form
Xs(x) = a1 cos (sx) + a2 sin (sx) fur x ∈ [0, L ], (4.77)
Ys(y ) = b1 cosh (sy ) + b2 sinh (sy ) fur y ∈ [0,M ]. (4.78)
Durch endliche oder abzahlbare Uberlagerung erhalt man eine Klasse von Losungen der Laplace Glei-
chung,
u(x, y ) =X
s>0
(a1 cos (sx) + a2 sin (sx)
)·(b1 cosh (sy ) + b2 sinh (sy )
)(4.79)
fur x ∈ [0, L], y ∈ [0,M ].
Durch Restriktion an die Wahl von s beziehungsweise Anpassung der Koeffizienten lassen sich dann wie
ublich noch gegebene Randbedingungen erfullen.
Beispiel 4.23 Es wird das folgende Randwertproblem fur die Laplace Gleichung betrachtet:
∆u = 0 fur x ∈ [0, L], y ∈ [0,M ],
u(0, y ) = u(L, y ) = 0 fur y ∈ [0,M ],
u(x,M ) = g(x), u(x, 0) = 0 fur x ∈ [0, L].
(4.80)
Die Situation ist in Abbildung 4.1 dargestellt.
0 L0
M
.....................................................................................................................
... x
....
.....
....
.....
.....
.....
.....
...................
................
y
∆u = 0
u(·,M ) = g
u(·, 0) = 0
u(0, ·) = 0 u(L, ·) = 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Abbildung 4.1 Ein Randwertproblem fur die zweidimensionale Laplace– Gleichung
Ansatze der Form Xs(x)Ys(y ) mit Funktionen Xs und Ys aus (4.77) beziehungsweise (4.78) erfullen die
Randbedingungen links und rechts, falls
Xs(0)Ys(y ) = Xs(L)Ys(y ) = 0 fur y ∈ [0,M ].
Dies bedeutet
Xs(0) = a1 = 0, Xs(L) = a2 sin (sL) = 0,
was fur
sL ∈ π, 2π, 3π, . . . erfullt ist. Die untere Randbedingung ist gleichbedeutend mit
Xs(x)Ys(0) = 0 fur x ∈ [0, L] ; Ys(0) = b1 = 0.

Abschnitt 4.11 Der Separationsansatz f ur die Laplace– Gleichung auf unbeschr ankten Gebieten 73
Damit gewinnt man Losungen von der Form
u(x, y ) =∞
X
n=1
an sin(n π
Lx)· sinh
(n π
Ly)
fur x ∈ [0, L], y ∈ [0,M ].
Nun mussen die Koeffizienten noch an die obere Randbedingung angepasst werden. Hierzu geht man von
einer Fourierentwicklung
g(x) =∞
X
n=1
cn sin(n π
Lx)
fur 0 ≤ x ≤ L
aus. Es gilt
u(x,M ) =∞
X
n=1
an sin(n π
Lx)· sinh
(n π
LM)
fur x ∈ [0, L],
und ein Koeffizientenvergleich liefert dann
an sinh(n π
LM)
= cn fur n = 1, 2, . . . .
Die Fourierentwicklung der Funktion g gewinnt man wie ublich durch ungerade Fortsetzung auf das Intervall
[−L, 0], mit dem Ergebnis
cn =2L
Z L
0g(ξ ) sin
(n π
Lξ)dξ fur n = 1, 2, . . . .
Fur die Darstellung der Losung des vorgegebenen Problems (4.80) fur die Laplace Gleichung erhalt man
dann die Darstellung
u(x, y ) =Z L
0K(x, y, ξ )g(ξ ) dξ fur x ∈ [0, L], y ∈ [0,M ], (4.81)
mit der Kernfunktion
K(x, y, ξ ) =2L
∞X
n=1
sinh`
n πL
y´
sinh`
n πL
M´ sin
(n π
Lx)sin(n π
Lξ).
M
4.11 Der Separationsansatz f ur die Laplace–Gleichung auf unbeschrank-ten Gebieten
Der in Abschnitt (4.79) gewahlte Ansatz lasst sich naturlich auch auf unbeschrankten Reckteckgebieten
vornehmen und fuhrt auf die gleiche Klasse (4.79) von Losungen. Hier sollen fur diese Situation die Wohl-
gestelltheit untersucht werden.
Beispiel 4.24 In dem vorliegenden Beispiel werden fur die Laplace Gleichung nichttriviale Losungen des
Cauchyproblems
∆u = 0 fur x, y ∈ R, y > 0
u(x, 0) = 0 fur x ∈ R,
∂u
∂y(x, 0) = δ cosnx fur x ∈ R
(4.82)

74 Kapitel 4 Die Poissongleichung
gesucht mit gegebenen Zahlen δ > 0 und n ∈ N. Der Ansatz u(x, y ) = Xs(x)Ys(y ) fuhrt auf die Bedin-
gungen
u(x, 0) = Xs(x)Ys(0) = Xs(x)(b1
= 1︷ ︸︸ ︷
cosh (0) + b2
= 0︷ ︸︸ ︷
sinh (0))
= b1Xs(x)!= 0 =⇒ b1 = 0,
beziehungsweise
∂u
∂y(x, 0) = Xs(x)Y ′
s (0) = sXs(x)(b1
= 0︷ ︸︸ ︷
sinh (0) + b2
= 1︷ ︸︸ ︷
cosh (0))
= b2sXs(x)!= δ cosnx fur x ∈ R,
=⇒ b2 =δn, s = n, Xs(x) = δ
ncosnx fur x ∈ R.
Die so gewonnene Losung ist also von der Form
u(x, y ) =δn
cosnx sinhny fur x ∈ R, y ≥ 0.M
Bemerkung 4.25 Beispiel 4.24 zeigt, dass das Cauchy Problem
∆u = 0 fur x, y ∈ R, y > 0
u(x, 0) = f (x) fur x ∈ R,
∂u
∂y(x, 0) = g(x) fur x ∈ R.
(4.83)
unstetig von den gegebenen Cauchydaten f : R → R und g : R → R abhangt (und damit nicht wohlgestellt
ist ), da kleine Storungen in g zu beliebig großen Storungen in der Losung fuhren konnen. Ist namlich
u : [0, L] × R+ → R eine Losung von (4.83), so stellt
uδ = u +δn
cosnx sinhny fur x ∈ R, y ≥ 0,
eine Losung von (4.83) dar, wenn man dort die Funktion g durch gδ = g+ δ cosnx fur x ∈ R ersetzt. Dann
gilt
maxx∈R
|gδ(x) − g(x)| = δ, maxx∈R
|uδ(x, y ) − u(x, y )| =δn
sinhny.
Wahrend der also der Fehler in den Cauchydaten in der Maxumimnorm klein ausfullt, geht der maximale
Fehler in der Losung gegen unendlich, und zwar z.B. fur festes n und y → ∞. Alternativ kann man auch
einen festen Wert fur y betrachten und n → ∞ gehen lassen, also immer hochfrequentere Cauchydaten
heranziehen. M

75
5 Schwache Losungen
5.1 Poisson–Gleichung
5.1.1 Einleitung
Gegeben sei die Poisson Gleichung auf einer beschrankten, stuckweise glatt berandeten offenen Menge
D ⊂ Rd,
−∆u = f auf D, u = 0 auf ∂D. (5.1)
Gesucht sind Funktionen umit geringen Differenzierbarkeitseigenschaften, die aber (5.1) in einem gewissen
Sinn erfullen. Hierzu sei
C∞0 (D) :=
v : D → R : v : D → R unendlich oft differenzierbar, v hat kompakten Trager
. (5.2)
Sei zunachst angenommen, dass die Poisson Gleichung (5.1) eine klassische Losung u : D → R besitzt,
und zusatzlich sei noch u ∈ C1(D) angenommen. Multiplikation der Poisson Gleichung (5.1) mit einer
Testfunktion v ∈ C∞0 (D) und anschließende Integration ergibt
Z
Df v dx = −
Z
Dv∆u dx
(∗)=
Z
D∇u · ∇v dx −
= 0︷ ︸︸ ︷Z
∂Dv∂u
∂nds, (5.3)
wobei die Identitat (∗) aus der ersten Greenschen Formel in Rd resultiert, und das Randintegral verschwindet
wegen des kompakten Tragers der Testfunktion.
Mit der Notation
Cp(D) := v : D → R p− mal stetig differenzierbar fur p = 1, 2, . . . (5.4)
und der Bilinearform sowie dem Standardskalarprodukt
a(u, v ) =Z
D∇u · ∇v dx fur u, v ∈ ∩ C1(D) (5.5)
〈〈u, v 〉〉L2(D ) =Z
Duv dx fur u, v ∈ C(D)
ist also (5.3) gleichbedeutend mit
a(u, v ) = 〈〈f , v 〉〉L2(D ) fur v ∈ C∞0 (D). (5.6)
Aus technischen Grunden ist es wunschenswert, dass die herangezogenen Testraume gleichzeitig auch die
verallgemeinerten Losungen enthalten. Dafur ist der oben betrachtete Testraum C∞0 (D) jedoch zu klein.
5.1.2 Erweiterte Testraume
Es soll daher nun ein großerer Testraum betrachtet werden:
H10 (D) := u ∈ C(D ) : ∇u existiert, stuckweise stetig, u ≡ 0 auf ∂D. (5.7)

76 Kapitel 5 Schwache L osungen
Dabei heißt die Funktion ∇u existent und stuckweise stetig, falls Folgendes gilt: es gibt eine Zerlegung
D = ∪nk=1Dk
mit endlich vielen offenen und paarweise disjunkten Mengen D1, D2, . . . ,Dn, so dass fur jeden Index
k ∈ 1, 2, . . . , n die Funktion u auf der Menge Dk auf jeder der Teilmengen partiell differenzierbar ist.
Außerdem sollen fur k = 1, 2, . . . , n alle partiellen Ableitungen von u|Dkjeweils stetig auf den Abschluss
Dk fortsetzbar sein. Die Werte von ∇u sind unabhangig von der Wahl der disunkten Zerlegung.
Der Definititionsbereich der Bilinearform a aus (5.5) lasst sich ohne Weiteres auf den Raum H10 (D) × H1
0 (D)
erweitern. Dort wird in naturlicher Weise eine Norm induziert:
Lemma 5.1 Die Abbildung a definiert auf dem Raum H10 (D) aus (5.26) ein Skalarprodukt. Die induzierte
Norm bezeichnen wir mit
||u ||a :=√
a(u, u) =( Z
D∇u · ∇u dx
)1/2
fur u ∈ H10 (D).
BEWEIS. Die Abbildung a ist offensichtlich bilinear. Außerdem gilt offensichtlich auch a(u, u) ≥ 0 fur
u ∈ H10 (D), und fur den Nachweis der Definitheit betrachtet man u ∈ H1
0 (D) mit a(u, u) = 0. Dann ist die
Funktion u auf D konstant und damit gilt u ≡ 0 wegen der vorliegenden Nullrandbedingungen.
Die Norm || · ||a ist auf dem Raum H10 (D) starker als || · ||L2(D ):
Proposition 5.2 (Ungleichung von Poincare ) Es gilt mit einer Konstanten c > 0 die Ungleichung
||u ||L2(D ) ≤ c( Z
D∇u · ∇u dx
)1/2
fur u ∈ H10 (D). (5.8)
BEWEIS. Der Beweis wird nur fur den eindimensionalen Fall d = 1 und Intervalle D = [a, b ] gefuhrt. Auf
Grund der Eigenschaft u(a) = 0 gilt
u(x) =Z x
au ′(t) dt fur x ∈ [a, b ], (5.9)
da der Haupsatz der Differenzial und Integralrechnung auch fur stuckweise stetig differenzierbare Funk-
tionen gultig ist. Ausgehend von (5.9) liefert eine Anwendung der Cauchy Schwarzschen Ungleichung die
folgende Abschatzung,
u(x)2 ≤Z x
a12 dt ·
Z x
au ′(t)2 dt = (x− a)
Z x
au ′(t)2 dt ≤ (b− a)
= ||u ′ ||22︷ ︸︸ ︷Z b
au ′(t)2 dt
fur x ∈ [a, b ],
und die eindimensionale Poincare Ungleichung resultiert nun unmittelbar aus der trivialen Abschatzung
||v ||2 = (∫ b
av(s)2 ds)1/2 ≤ (b− a)1/2||v ||∞ fur v ∈ C[a, b ].
Die Normen || · ||a und || · ||L2(D ) sind jedoch nicht aquivalent:
Beispiel 5.3 Auf D = (0, 1) betrachten wir die Bilinearform
a(u, v ) =Z 1
0u ′ v ′ dx fur u, v ∈ H1
0 (0, 1).

Abschnitt 5.1 Poisson– Gleichung 77
Fur die Folge vn : [0, 1] → R definiert durch
vn(x) =
nx, falls 0 ≤ x ≤ 1/n,
1, falls 1/n ≤ x ≤ 1 − 1/n,
n(1 − x), falls 1 − 1/n ≤ x ≤ 1,
gilt dann
||vn ||L2(D ) ≤( Z 1
01 dx
)1/2
= 1,
||vn ||a =( Z 1/n
0n2 dx +
Z 1
1−1/nn2 dx
)1/2
=√
2n → ∞ fur n→ ∞.
Damit existiert keine endliche Konstante c > 0, fur die die Ungleichung ||v ||a ≤ c||v ||L2(D ) fur alle v ∈H1
0 (0, 1) erfullt ist. M
Lemma 5.4 Die Menge C∞0 (D) liegt bezuglich der Norm || · ||a dicht in dem Raum H1
0 (D).
BEWEIS. Entfallt.
Als Konsequenz aus der Poincare Ungleichung erhalt man die Dichtheit der Menge C∞0 (D) auch bezuglich
der Norm ||u ||L2(D ) = 〈〈u, u〉〉1/2
L2(D ).
Lemma 5.5 Jede klassische Losung u : D → R der Poisson Gleichung (5.1) erfullt die Variationsglei-
chung
a(u, v ) = 〈〈f , v 〉〉L2(D ) fur alle v ∈ H10 (D). (5.10)
BEWEIS. Zu einem beliebigen Element v ∈ H10 (D) gibt es nach Lemma 5.4 eine Folge vn n∈0,1,... ⊂
C∞0 (D) mit der Eigenschaft ||vn − v ||a → 0 fur n→ ∞. Wegen der Poincare Ungleichung (5.8) gilt dann
auch ||vn − v ||L2(D ) → 0 fur n→ ∞. Aus (5.6) folgt
a(u, vn ) = 〈〈f , vn 〉〉L2(D ) fur n = 0, 1, . . .,
und außerdem folgen aus der Cauchy Schwarzschen Ungleichung fur die Skalarprodukte a(·, ·) und 〈〈 ·, · 〉〉L2 (D )
die Abschatzungen
|a(u, v − vn )| ≤ ||u ||a||v − vn ||a → 0 fur n→ ∞,
|〈〈f , v − vn 〉〉L2(D ) | ≤ ||f ||L2(D )||v − vn ||L2(D ) → 0 fur n→ ∞.
Daraus erhalt man
a(u, v ) = limn→∞
a(u, vn ) = limn→∞
〈〈f , vn 〉〉L2(D ) = 〈〈f , v 〉〉L2(D ).
Definition 5.6 Eine Funktion u ∈ H10 (D) heißt schwache Losung der Poisson Gleichung (5.1), falls sie
die Variationsgleichung (5.10) erfullt.

78 Kapitel 5 Schwache L osungen
Von einer schwachen Losung wird eine geringere Glattheit gefordert. Die Erfullung der Randbedingungen
ist aber durch die Wahl des Grundraumes H10 (D) gesichert.
Man ist auch an Kriterien fur die Existenz von schwachen Losungen interessiert. Hier wird sich die Vollstandig-
keit als hinreichendes Kriterium herausstellen. Der Raum H10 (D) erfullt dieses Kriterium jedoch nicht.
Beispiel 5.7 Auf D = (0, 1) betrachten wir wieder die Bilinearform
a(u, v ) =Z 1
0u ′ v ′ dx fur u, v ∈ H1
0 (0, 1).
Sei außerdem
u(x) =
xα /α, falls 0 < x ≤ 1/2,
xα(1 − x)/α sonst
(12< α < 1
)
und damit u ∈ C [0, 1], u(0) = u(1) = 0. Außerdem gilt
u ′(x) = xα−1 fur 0 < x ≤ 1/2,
und u ′ ist stetig fur 1/2 < x ≤ 1, so dass u ′ ∈ L2(0, 1) gilt. Fur die Folge un : [0, 1] → R definiert durch
un(x) =
u(1/n)nx, falls 0 ≤ x ≤ 1/n,
u(x), falls 1/n ≤ x ≤ 1,
gilt dann
un ∈ H10 (0, 1) fur n = 1, 2, . . .,
||u ′n − u ′ ||L2(D ) → 0 fur n→ ∞.
Damit ist
||un − um ||a ≤ ||u ′n − u ′ ||L2(D ) + ||u ′ − u ′
m ||L2(D ) → 0 fur n, m→ ∞,
so dass un eine H10 (0, 1) Cauchyfolge darstellt. Allerdings ist die Funktion u ′ nicht stuckweise stetig,
so dass u 6∈ H10 (0, 1) gilt und damit die Cauchyfolge nicht in H1
0 (0, 1) konvergiert. M
5.1.3 Allgemeine Theorie f ur Variationsgleichungen
Im Folgenden werden wir sehen, dass schwache Losungen zugleich auch Losungen eines Minimierungs-
problems sind.
Definition 5.8 Eine Bilinearform a : V × V → R auf einem Vektorraum V heißt
• symmetrisch, falls a(u, v ) = a(v, u) fur alle u, v ∈ V gilt,
• positiv semidefinit, falls a(u, u) ≥ 0 gilt fur alle u ∈ V ,
• positiv definit, falls sie positiv semidefinit ist und a(u, u) = 0 nur fur u = 0 gilt.
Im Folgenden wird die folgende Situation betrachtet:
Es sei a : V ×V → R eine symmetrische, positiv definite Bilinearform auf einem Vektorraum
V , und die Abbildung b : V → R sei linear.(5.11)

Abschnitt 5.1 Poisson– Gleichung 79
Unter den Bedingungen (5.11) interessieren wir uns fur Losungen u ∈ V der Variationsgleichung
a(u, v ) = b(v ) fur v ∈ V. (5.12)
Hierzu betrachtat man das Funktional
F (v ) = 12a(v, v ) − b(v ) fur v ∈ V. (5.13)
Dieses Funktional F wird als Energiefunktional bezeichnet.
Theorem 5.9 Es seien die Bedingungen (5.11) erfullt. Dann sind fur ein Element u ∈ V die folgenden
Aussagen aquivalent:
• Das Element u lost die Variationsgleichung (5.12).
• Es ist das Element u ein Minimierer des Energiefunktionals aus (5.13),
F (u) = minv∈V
F (v ).
BEWEIS. Es sei zunachst angenommen, dass u ∈ V die Variationsgleichung (5.12) erfullt, und sei v ∈ Vbeliebig. Mit der Notation w = u+ v erhalt man dann Folgendes:
F (v ) = 12a(u+ w, u +w) − b(u+ w)
= 12a(u, u) + a(u,w) + 1
2a(w,w) − b(u) − b(w)
(∗∗)= F (u) + 1
2a(w,w).
Hierbei resultiert die Identitat (∗) aus der Bilinearitat und der Symmtrie der Abbildung a, und die Identitat(∗∗) folgt wegen a(u,w) = b(w). Die Abschatzung erhalt man aus der positiven Definitheit der Bilinear-
form a.
Sei nun u ∈ V ein minimierendes Element des Energiefunktionals F . Fur v ∈ V beliebig gilt dann
g(t) := F (u + tv ) ≥ F (u) = g(0) fur t ∈ R. (5.14)
Damit besitzt das Funktional g ein globales Minimum an der Stelle t = 0. Außerdem lasst sich das Funk-
tional g in der Form
g(t) =a(v, v )
2t2 +
(
=: c︷ ︸︸ ︷
a(u, v ) − b(v ))t +
= F (u)︷ ︸︸ ︷
12a(u, u) − b(u)
= t(c +
a(v, v )
2t)
+ F (u) fur t ∈ R
schreiben, was man genauso wie im ersten Teil des Beweises erhalt. Im Falle a(u, v )− b(v ) = c 6= 0 wurde
sich fur hinreichend klein gewahltes t sofort ein Widerspruch zu (5.14) ergeben.
Theorem 5.10 Es seien die Bedingungen (5.11) erfullt. Dann gibt es hochstens eine Losung u ∈ V der
Variationsgleichung (5.12).
BEWEIS. Seien Losung u1 ∈ V und u2 ∈ V Losungen der Variationsgleichung (5.12), es gilt also
a(u1, v ) = b(v ), a(u2, v ) = b(v ) fur v ∈ V.Subtraktion liefert dann

80 Kapitel 5 Schwache L osungen
a(u1 − u2, v ) = 0 fur v ∈ Vund damit insbesondere
a(u1 − u2, u1 − u2 ) = 0
beziehungsweise u1 = u2.
Es sei a : V ×V → R eine Bilinearform auf einem Hilbertraum (V, || · ||), und die Abbildung
b : V → R sei linear. Außerdem seien die folgenden Bedingungen erfullt:
• Die Bilinearform a ist stetig bezuglich der Norm || · ||, das heißt, mit einer endlichen
Konstanten M ≥ 0 gilt
|a(u, v ) | ≤ M ||u ||||v || fur u, v ∈ V.
• Die Bilinearform a ist V-elliptisch, das heißt, mit einer positiven Konstanten τ > 0 gilt
a(u, u) ≥ τ ||u ||2 fur u ∈ V .
• Das lineare Funktional b ist stetig, das heißt, mit einer endlichen Konstanten K ≥ 0 gilt
|b(u)| ≤ K||u || fur u ∈ V.
(5.15)
Theorem 5.11 (Lax-Milgram-Theorem) Seien die Bedingungen in (5.15) erfullt. Dann besitzt die Variati-
onsgleichung
a(u, v ) = b(v ) fur alle v ∈ Vgenau eine Losung.
BEWEIS. Entfallt
5.1.4 Schwache Ableitungen, Sobolevraum H1(D )
Einen Vektor α = (α1, α2, . . . , αd ) mit ganzzahligen nichtnegativen Eintragen αj ∈ 0, 1, 2, . . . nennt
man Multiindex. Es heißt
|α| :=d
X
j=1
αj
die Ordnung des Multiindex α. Fur einen solchen Multiindex definiert man
xα := xα11 · xα2
2 · . . . · xαdd fur x ∈ R.
Entsprechend definiert man zu einer gegebenen offenen Menge u : D ⊂ Rd und einer |α|-mal stetig partiell
differenzierbaren Funktion u : D → R Folgendes:∂αu∂xα =
∂α1
∂xα1
1
∂α2
∂xα2
2
. . .∂αd
∂xαd
d
u
Fur eine solche Funktion u erhalt man fur jede Testfunktion ϕ ∈ C∞0 (D) durch partielle Integration Folgen-
des:Z
D
∂αu∂xαϕdx = (–1)|α |
Z
Du
∂αϕ
∂xα dx. (5.16)

Abschnitt 5.1 Poisson– Gleichung 81
Hierbei verschwinden die Randintegrale, da fur alle Multiindizes β die Funktionen ∂β ϕ
∂xβauf dem Rand ∂D
verschwindet. Die Darstellung (5.16) legt folgende Verallgemeinerung nahe:
Definition 5.12 Fur u ∈ L2(D) heißt eine Funktion v ∈ L2(D) schwache oder verallgemeinerte Ablei-
tung von u zum Multiindex α, falls
Z
Dvϕ dx = (–1)|α |
Z
Du
∂αϕ∂xα dx fur alle ϕ ∈ C∞
0 (D). (5.17)
Es wird die Notation ∂αu∂xα = v verwendet.
Proposition 5.13 Eine Funktion u ∈ L2(D) besitzt hochstens eine schwache Ableitung.
BEWEIS. Seien v1 ∈ L2(D) und v2 ∈ L2(D) schwache Ableitungen von u zum Multiindex α. Dann gilt fur
die Differenz v = v1 − v2 insbesondereZ
Dvϕ dx = 0 fur alle ϕ ∈ C∞
0 (D)
Es liegt die Menge C∞0 (D) dicht in L2(D), und damit gilt auch
Z
Dvϕ dx = 0 fur alle ϕ ∈ L2(D).
Mit der speziellen Wahl ϕ = v erhalt man dann ||v ||L2(D ) = 0 beziehungsweise v ≡ 0.
Beispiel 5.14 Die Funktion u(x) = |x| fur −1 ≤ x ≤ 1 besitzt v(x) = sgn(x) als schwache Ableitung.
Die Funktion u(x) = sgn(x) dagegen besitzt keine schwache Ableitung (Ubungsaufgabe). M
Beispiel 5.15 Die Funktion u(x) = |x|β fur x ∈ Rd mit |x| ≤ R besitzt die schwachen Ableitungen
∇u(x) = β|x|β−1x (Ubungsaufgabe). M
Wir konnen nun den Raum H1(D) einfuhren.
H1(D) :=
u ∈ L2(D) : schwache Ableitung∂u
∂xjexistiert,
∂u
∂xj∈ L2(D) fur 1 ≤ j ≤ d
. (5.18)
Auf dem Raum H1(D) ist durch
〈〈u, v 〉〉H1(D) =
Z
Duv dx +
Z
D∇u · ∇v dx fur u, v ∈ H1(D)
ein Skalarprodukt erklart, und die induzierte Norm ist
||u ||H1 (D ) =( Z
D|u(x)|2 dx +
Z
D|∇u(x)|22 dx
)1/2
fur u ∈ H1(D).
Der Raum H1(D) wird Sobolev Raum genannt.
Theorem 5.16 Der Sobolev Raum H1(D) versehen mit dem Skalarprodukt 〈〈 ·, · 〉〉H1 (D) ist ein Hilber-
traum.
BEWEIS. Entfallt.
Fur d = 1 sind alle Funktionen aus H10 (D) stetig:

82 Kapitel 5 Schwache L osungen
Lemma 5.17 Fur jede Funktion v ∈ H1(a, b) gilt
|v(x) − v(y )| ≤ ||v ||H1( (a, b ) )|x− y |1/2 fur x, y ∈ (a, b),
und sie lasst sich in eindeutiger Weise stetig nach x = a und x = b fortsetzen. Damit gilt H 1(a, b) ⊂C [a, b].
BEWEIS. Es gilt mit
v(y ) − v(x) =Z y
xv ′(ξ ) dξ fur a < x ≤ y < b, (5.19)
ein Fundamentalsatz der Differenzial und Integralrechnung fur die Funktion v, und daraus erhalt man leicht
die angegebene Abschatzung. Die zweite Aussage ergibt sich leicht aus der gewonnenen Abschatzung. Die
Details werden hier nicht vorgestellt ( Ubungsaufgabe).
Im Fall d ≥ 2 konnen Funktionen aus H10 (D) Singularitaten besitzen.
Beispiel 5.18 Sei D = x ∈ R2 : |x| < R. Die Funktion u(x) = |x|β, x ∈ D ist fur β > −1 in H1(D)
enthalten (Ubungsaufgabe). Damit gilt insbesondere H 1(D) 6⊂ C(x ∈ R2 : |x| ≤ R). M
Fur d ≥ 2 ist daher noch zu uberlegen, wie die Bedingung “u = 0 auf ∂D“ definiert werden soll. Hierzu
nennen wir Menge offene beschrankte und zusammenhangende Menge D ⊂ Rd ein Lipschitz Gebiet, falls
der Rand durch eine Lipschitz stetige Funktion parametrisiert werden kann. Wir betrachten nun die Menge
C∞(D) = v : Ω → R : es gibt w ∈ C∞(Rd ) mit w|D = v.
Lemma 5.19 Sei D ⊂ Rd ein Lipschitz Gebiet. Dann liegt die Menge C∞(D) dicht in H1(D), und die
lineare Abbildung
γ0 : (C∞(D), || · ||H1(D ) ) → (L2(∂D), || · ||L2(∂D ) ), v 7→ v|∂D
ist beschrankt. Es gibt daher eine eindeutige lineare beschrankte Fortsetzung
γ0 : (H1(D), || · ||H1(D ) ) → (L2(∂D), || · ||L2(∂D ) ).
Im Folgenden schreiben wir fur eine Funktion v ∈ H 1(D) kurz v|∂D anstelle von γ0(v ). Die Beschranktheit
der Spurabbildung bedeutet dann
( Z
∂Dv2 ds
)1/2
≤ C||v ||H1(D ) = C( Z
D|v(x)|2 dx +
Z
D|∇v(x)|22 dx
)1/2
(5.20)
fur v ∈ H1(D).
Wir konnen nun mit dem Raum H10 (D) den geeigneten Grund- und Testraum einfuhren.
H10 (D) := u ∈ H1(D) : u = 0 auf ∂D. (5.21)
Lemma 5.20 Sei D ⊂ Rd ein Lipschitz Gebiet. Dann ist (H1
0 (D), || · ||H1(D ) ) ein Hilbertraum, und die
Menge C∞0 (D) liegt dicht in H1
0 (D).
BEWEIS. Siehe Alt, Lineare Funktionanalysis.

Abschnitt 5.1 Poisson– Gleichung 83
5.1.5 Sobolevraume hoherer Ordnung, Gaußscher Integralsatz
Wir konnen nun den Raum Hk(D) mit k ∈ N einfuhren.
Hk(D) :=
u ∈ L2(D) : schwache Ableitungen ∂αu∂xα existieren, ∂αu
∂xα ∈ L2(D) fur |α| ≤ k
.
(5.22)
Auf dem Raum Hk(D) ist durch
〈〈u, v 〉〉Hk (D) =
X
|α |≤k
Z
D
∂αu∂xα
∂αv∂xα dx fur u, v ∈ Hk(D) (5.23)
ein Skalarprodukt erklart.
Theorem 5.21 Der Raum Hk(D) ist mit dem Skalarprodukt aus (5.23) ein Hilbertraum. Es gilt
H1(D) ⊃ H2(D) ⊃ H3(D) . . . .
Fur ein beschranktes Lipschitz Gebiet D ⊂ Rd gilt außerdem
Hk(D) ⊂ C(D ) fur k > d/2.
BEWEIS. Die Inklusionen sind klar, und der Beweis der zweiten Aussage des Theorems entfallt.
In der Situation 2 ≤ d ≤ 3 gilt also H2(D) ⊂ C(D). Wir kommen nun zur Formulierungen von Inte-
gralsatzen, die fur ein Lipschitz Gebiet D ⊂ Rd auch in Sobolevraumen gelten. Ausgangspunkt ist wieder-
um der Gaußsche IntegralsatzZ
DdivF dx =
Z
∂DF · ν dS,
wobei fur das Vektorfeld F lediglich F ∈ [H 1(D) ]d vorausgesetzt wird. Dabei existiert die außere Norma-
lenableitung
ν : ∂D → Rd
fast uberall und es gilt ν ∈ [L∞(∂D) ]d.
Fur Funktionen u ∈ H2(D) und v ∈ H1(D) gilt die erste Greensche FormelZ
Dv∆u dx = −
Z
D∇v · ∇u dx +
Z
∂Dv∂u
∂nds,
die man direkt aus dem Gaußschen Integalsatz mit der speziellen Wahl F = v∇u erhalt.
5.1.6 Schwache Formulierung der Poisson– Gleichung auf H1(D )
Die getroffenen Aussagen fur die Bilinearform a lassen sich alle fur den Sobolev Raum H 10 (D) erweitern.
Wir formulieren nur die Aussagen:
• Jede Losung u ∈ H2(D) der Poisson Gleichung (5.1) erfullt die Variationsgleichung
a(u, v ) = 〈〈f , v 〉〉L2(D ) fur alle v ∈ H10 (D). (5.24)
• Die Bilinearform
a(u, v ) =Z
D∇u · ∇v dx fur u, v ∈ H1(D)
ist auf dem Raum H1(D) symmetrisch und stetig bezuglich || · ||H1(D ).

84 Kapitel 5 Schwache L osungen
• Die Bilinearform a ist außerdemH10 (D) elliptisch, was eine Konsequenz aus der Poincare Ungleichung
||u ||L2(D ) ≤ c( Z
D|∇u|22 dx
)1/2
fur u, v ∈ H10 (D)
ist.
• Fur jedes f ∈ L2(D) ist die lineare Abbildung b(v ) =∫
D fv dx stetig auf dem Raum H1(D):
|b(v )| ≤Z
D|f v | dx ≤ ||f ||L2(D )||v ||L2(D ) ≤ ||f ||L2(D )||v ||H1(D ) fur v ∈ H1(D).
Als Konsequenz aus dem Lax/Milgram Theorem erhalt man Folgendes:
Theorem 5.22 Es besitzt die Variationsgleichung (5.24) fur jede Funktion f ∈ L2(D) eine eindeutige
Losung. Diese nennt man schwache Losung des Randwertproblems (5.1) fur die Poisson Gleichung.
5.1.7 Andere Randbedingungen
Es wird nun die Poisson Gleichung
−∆u = f auf Dauf einem beschrankten Lipschitz Gebiet D ⊂ R
d betrachtet, wobei aber allgemeinere Randbedingungen
herangezogen werden. Hierzu sei
∂D = Γ1 ∪ Γ2 ∪ Γ3
eine disjunkte Zerlegung des Randes von D, wobei Γ3 ein positives Maß besitze. Wir betrachten dann die
Randbedingungen
∂u
∂n= g1 auf Γ1,
∂u
∂n+ αu = g2 auf Γ2, u = g3 auf Γ3 (5.25)
mit gegebenen stetigen und beschrankten Funktionen
g1 : Γ1 → R, α, g2 : Γ2 → R, g3 : Γ3 → R.
Es liegen also auf dem Teilstuck Γ1 Neumann Randbedingungen, auf Γ2 gemischte Randbedingungen und
auf Γ3 Dirichlet Randbedingungen vor.
In der Situation
g3 ≡ 0
ist der folgende Test und Ansatzraum angemessen:
H1(D, Γ3 ) := u ∈ H1(D) : u ≡ 0 auf ∂Γ3 . (5.26)
Es ist H1(D, Γ3 ) eine abgeschlossener Unterraum von H 1(D) und daher (H1(D, Γ3 ), || · ||H1(D ) ) ein
Hilbertraum.
Multiplikation der Poisson Gleichung (5.1) mit einer Testfunktion v ∈ H 1(D, Γ3 ) und anschließende Inte-
gration ergibt
Z
Df v dx = −
Z
Dv∆u dx =
Z
D∇u · ∇v dx −
Z
∂Dv∂u
∂nds.
Fur das Randintegral erhalt man

Abschnitt 5.1 Poisson– Gleichung 85
Z
∂Dv∂u
∂nds =
Z
Γ1
v
= g1︷︸︸︷
∂u
∂nds +
Z
Γ2
v
= g2 − αu︷︸︸︷
∂u
∂nds +
= 0︷ ︸︸ ︷Z
Γ3
v∂u
∂nds
=Z
Γ1
g1 v ds +Z
Γ2
g2 v ds − αZ
Γ2
uv ds.
Die vorliegende Randwertproblem fur die Poisson Gleichung nimmt damit die Variationsformierung
a(u, v ) = b(v ) fur v ∈ H1(D, Γ3 ) (5.27)
an mit
a(u, v ) =Z
D∇u · ∇v dx +
Z
Γ2
αuv ds fur u, v ∈ H1(D, Γ3 ),
b(v ) =Z
Df v dx +
Z
Γ1
g1 v ds +Z
Γ2
g2 v ds fur v ∈ H1(D, Γ3 ).
Fur die nachfolgenden Betrachtungen wird das folgende Theorem benotigt, das eine Verallgemeinerung der
Poincare Ungleichung darstellt.
Theorem 5.23 (Ungleichung von Friedrich) Sei D ⊂ Rd ein beschranktes Lipschitz Gebiet, und die Teil-
menge Γ ⊂ D besitze ein positives (d − 1) dimensionales Maß. Dann gilt mit einer Konstanten c > 0 die
Ungleichung
||u ||L2(D ) ≤ c( Z
Γu2 ds +
Z
D|∇u|22 dx
)1/2
fur u ∈ H1(D). (5.28)
Insbesondere gilt damit
||u ||L2(D ) ≤ c( Z
D|∇u|22 dx
)1/2
fur u ∈ H1(D) mit u ≡ 0 auf Γ. (5.29)
BEWEIS. Entfallt.
Im Fall d = 1 und D = (a, b) erhalt man aus der Friedrich Ungleichung zum Beispiel
||u ||L2( (a, b ) ) ≤ c(
u(a)2 +Z b
a(u ′ )2 dx
)1/2
fur u ∈ H1(a, b)
mit einer Konstanten c > 0. Diese Abschatzung erhalt man genauso wie die Poincare Ungleichung ( Ubungs-
aufgabe).
Die wesentlichen Eigenschaften der Bilinearform a und der linearen Abbildung b sind im Folgenden fest-
gehalten.
• Jede klassische Losung u der Poisson Gleichung mit Randbedingungen wie in (5.25) mit g3 ≡ 0 ist in
H1(D, Γ3 ) enthalten und stellt eine Losung der Variationsgleichung (5.27) dar.
• Die Bilinearform a ist offensichtlich symmetrisch. Sie ist zudem H 1(D) stetig, was aus der Stetigkeit

86 Kapitel 5 Schwache L osungen
der Spurabbildung folgt, siehe (5.20):
|a(u, v )| ≤Z
D|∇u · ∇v | dx +
Z
Γ2
|αuv | ds
≤( Z
D|∇u|22 dx
)1/2( Z
D|∇v |22 dx
)1/2
+ supx∈Γ2
|α(x)|( Z
Γ2
u2 ds)1/2( Z
Γ2
v2 ds)1/2
≤ ||u ||H1 (D )||v ||H1(D ) + supx∈Γ2
|α(x)|( Z
∂Du2 ds
)1/2( Z
∂Dv2 ds
)1/2
≤(1 + sup
x∈Γ2
|α(x)|)||u ||H1 (D )||v ||H1(D ).
• Die Bilinearform a ist unter der Bedingung
α(x) ≥ 0 fur x ∈ Γ2 (5.30)
H1(D, Γ3 ) elliptisch. Dies folgt so:
a(u, u) =Z
D|∇u|22 dx +
≥ 0︷ ︸︸ ︷Z
Γ2
αu2 ds =Z
D|∇u|22 dx =
(12
+ 12
) Z
D|∇u|22 dx
(∗)≥ c−2
2
Z
Du2 dx + 1
2
Z
D|∇u|22 dx ≥ 1
2 max (1, c2 )
( Z
Du2 dx +
Z
D|∇u|22 dx
)
︸ ︷︷ ︸
= ||u ||2H1 (D )
.
Hierbei folgt die Abschatzung (∗) unmittelbar aus der Abschatzung (5.29), und die Konstante c hat auch
die gleiche Bedeutung wie in (5.29).
• Die lineare Abbildung b ist H1(D) stetig, was wiederum aus der Stetigkeit (5.20) der Spurabbildung
folgt:
|b(v )| ≤Z
D|f v | dx +
Z
Γ1
|g1 v | ds +Z
Γ2
|g2 v | ds
≤ ||f ||L2(D )||v ||H1(D ) + ||g1 ||L2(Γ1 )||v ||L2(Γ1 ) + ||g2 ||L2(Γ2 )||v ||L2(Γ2 )
≤(||f ||L2(D ) + ||g1 ||L2(Γ1 ) + ||g2 ||L2(Γ2 )
)||v ||H1(D ).
Theorem 5.24 Unter der Bedingung (5.30) besitzt die Variationsgleichung (5.27) fur jede Funktion f ∈L2(D) eine eindeutige Losung. Diese nennt man schwache Losung des Randwertproblems (5.25) mit g3 ≡0 fur die Poisson Gleichung.
5.2 Andere elliptische Differenzialgleichungen
Auf einem beschrankten Lipschitz Gebiet D ⊂ Rd wird nun noch kurz die Verallgemeinerung
Lu = f auf D,behandelt mit dem Differenzialoperator
(Lu)(x) = −div(K(x)∇u(x)) + c(x) · ∇u(x) + r(x)u(x) fur x ∈ D. (5.31)
Die Koeffizienten
K : D → Rd × d, c : D → R
d, r : D → R.

Abschnitt 5.2 Andere elliptische Differenzialgleichungen 87
sind dabei als stetig angenommen. Fur die Betrachtung der Randbedingungen sei wieder
∂D = Γ1 ∪ Γ2 ∪ Γ3
eine disjunkte Zerlegung des Randes von D, wobei Γ3 ein positives Maß besitze. Wir betrachten dann die
Randbedingungen
(K∇u) · ν = g1 auf Γ1, (K∇u) · ν + αu = g2 auf Γ2, u = g3 auf Γ3 (5.32)
mit gegebenen stetigen und beschrankten Funktionen
g1 : Γ1 → R, α, g2 : Γ2 → R, g3 : Γ3 → R.
Beispiel 5.25 Gegeben sei das Randwertproblem
(−εu ′ + u) ′ = 0 auf (0, 1), u(0) = 0, u(1) = 1.
Dieses Randwertproblem besitzt die Losung
u(x) =1 − exp (x/ε)
1 − exp (1/ε)fur 0 ≤ x ≤ 1.
Fur kleine Werte von ε, etwa 0 < ε ≤ 0.01, weist die Losung ein starkes Grenzschichtverhalten auf. M
Mit den allgemeinen Randbedingungen aus (5.25) lautet die Variationsgleichung im Fall g3 = 0 folgender-
maßen:
a(u, v ) = b(v ) fur v ∈ H1(D, Γ3 ) (5.33)
mit
a(u, v ) =Z
D
(K∇u) · ∇v + (c · ∇u)v + ruv
dx +
Z
Γ2
αuv ds fur u, v ∈ H1(D, Γ3 ),
b(v ) =Z
Df v dx +
Z
Γ1
g1 v ds +Z
Γ2
g2 v ds fur v ∈ H1(D, Γ3 ).
Hierbei geht eine partielle Integration der Form
−Z
Ddiv (K∇u)v dx =
Z
D(K∇u) · ∇v dx −
Z
∂Dv(K∇u) · ν ds
ein.
5.2.1 Stetigkeit der Bilinearform a
Fur den Nachweis der Stetigkeit der Bilinearform a berechnet man
|a(u, v ) | ≤∣∣∣
Z
D
(K∇u) · ∇v + (c · ∇u)v + ruv
dx∣∣∣
≤Z
D
|(K∇u) · ∇v | + |(c · ∇u)v | + |ruv |
dx
≤ CZ
D
|∇u|2 |∇v |2 + |∇u|2 |v | + |u||v |
dx
mit der Konstanten
C := maxx∈D
(
max||K(x) ||2, |c(x)|2, |r(x)|
)

88 Kapitel 5 Schwache L osungen
wobei ||K(x) ||2 die Spektralnorm der Matrix K (x) bezeichnet. Eine Anwendung der Cauchy Schwarz-
schen Ungleichung in R2 und L2(D) ergibt
Z
D
|∇u|2 |∇v |2 + |u| |v |
dx ≤
Z
D
|∇u|22 + u2
1/2 |∇v |22 + v21/2
dx
≤ Z
D|∇u|22 + u2 dx
1/2Z
D|∇v |22 + v2 dx
1/2= ||u ||H1 (D )||v ||H1(D ).
Außerdem liefert die Cauchy Schwarzsche Ungleichung auf L2(D) noch
Z
D|∇u|2 |v | dx ≤
( Z
D|∇u|22 dx
)1/2( Z
Dv2 dx
)1/2
≤ ||u ||H1 (D )||v ||L2(D )
≤ ||u ||H1 (D )||v ||H1(D ).
Insgesamt erhalt man die H1(D) Stetigkeitkeit der Bilinearform a:
|a(u, v )| ≤ 2C||u ||H1 (D )||v ||H1(D ) fur u, v ∈ H1(D).
5.2.2 H10 (D )– Elliptizitat der Bilinearform a
Fur den Nachweis der H10 (D) Elliptizitat der Bilinearform a berechnet man unter Berucksichtigung der
Identitat ∇(u2 ) = (∇u)u+u∇u = 2u∇u sowie unter Verwendung der ersten Greenschen Formel Folgen-
des:Z
D(c · ∇u)u dx = 1
2
Z
Dc · [∇(u2 ) ] dx = 1
2
−Z
D(divc)u2 dx +
Z
Γ1∪Γ2
(c · ν )u2 ds
.
Damit erhalt man
a(u, u) =Z
D
(K∇u) · ∇u + (c · ∇u)u + ru2
dx +
Z
Γ2
αu2 ds
=Z
D
(K∇u) · ∇u +
(r − 1
2divc
)u2dx +
Z
Γ2
(α+ 1
2c · ν
)u2 ds + 1
2
Z
Γ1
(c · ν )u2 ds
fur u ∈ H1(D, Γ3 ).
Es werden nun die folgenden Annahmen getroffen.
• Der Operator L ist gleichmaßig elliptisch, das heißt, fur eine Konstante k0 > 0 giltd
X
m,n=1
kmn(x)ξmξn ≥ k0|ξ |2 fur alle ξ ∈ Rd.
• Es gilt
r − 12divc ≥ 0 auf D, c · ν ≥ 0 auf Γ1, α+ 1
2c · ν ≥ 0 auf Γ2.
(5.34)
Damit ist Folgendes nachgewiesen:
Theorem 5.26 Unter der Bedingung (5.34) besitzt fur jede Funktion f ∈ L2(D) die Variationsgleichung
(5.33) eine eindeutige Losung. Diese nennt man schwache Losung des Randwertproblems (5.25) mit g3 ≡ 0
fur die Differenzialgleichung Lu = f auf D, mit dem Differenzialoperator L aus (5.31).

Abschnitt 5.3 W armeleitungsgleichung 89
5.2.3 Inhomogene Dirichlet-Randbedingungen
Wir betrachten wieder das Randwertproblem (5.25) fur die Differenzialgleichung Lu = f auf D mit dem
Differenzialoperator L aus (5.31), dieses Mal jedoch mit allgemeiner Funktion g3 ∈ L2(Γ3 ). Dieses Rand-
wertproblem lasst sich auf homogene Dirichlet-Randbedingungen zuruckfuhren, falls eine Funktion mit
w ∈ H1(D) mit w = g3 auf Γ3 (5.35)
existiert. Eine solche Funktion w muss allerdings nicht immer existieren, was daran liegt, dass das Bild des
Spuroperators eine echte Teilmenge von L2(∂D) ist.
Wir setzen nun die Existenz einer Funktion w wie in (5.35) voraus. Es heißt dann naheliegenderweise
u = u+ w mit
u ∈ H1(D, Γ3 ), a(u, v ) = b(v ) − a(w, v ) fur v ∈ H1(D, Γ3 )
eine schwache Losung des vorliegenden Problems.
5.3 Warmeleitungsgleichung
Gegeben sei ein beschranktes Lipschitz Gebiet D ⊂ Rd. Gegeben seien weiterhin Funktionen
f (x, t) ∈ R fur x ∈ D, t ≥ 0, u0(x) ∈ R fur x ∈ D, t ≥ 0,
und gesucht ist eine Funktion
u(x, t) ∈ R fur x ∈ D, t ≥ 0,
die das folgende Anfangsrandwertproblem lost:
∂u
∂t+ Lu = f auf D × (0, T ), (5.36)
u(·, t) = 0 auf ∂D fur 0 < t ≤ T, (5.37)
u(·, 0) = u0 auf D (5.38)
behandelt mit dem Differenzialoperator (siehe (5.31))
(Lv )(x) = −div (K(x)∇v(x)) + c(x) · ∇v(x) + r(x)v(x) fur x ∈ D. (5.39)
Die Koeffizienten
K : D → Rd × d, c : D → R
d, r : D → R,
sind dabei als zeitunabhangig und stetig angenommen. Der Differenzialoperator L wirkt also nur auf x.
Ausgeschrieben bedeutet die Differenzialgleichung (5.36)∂u
∂t(x, t) + (Lu)(x, t) = f (x, t) fur x ∈ D, 0 < t ≤ T,
wobei in der Notation (Lu)(x, t) fur jeden Wert von t als Funktion von x aufzufassen ist, es stellt also t ein
Parameter dar.
5.3.1 Schwache Formulierung bzgl. x
Eine schwache Formulierung bzgl. x lautet⟨⟨ ∂u
∂t, v⟩⟩
L2(D )+ a(u(t), v ) = b(v ) fur v ∈ H1
0 (D), (5.40)
u(·, 0) = u0 auf D, (5.41)

90 Kapitel 5 Schwache L osungen
mit
a(u, v ) =Z
D
(K∇u) · ∇v + (c · ∇u)v + ruv
dx fur u, v ∈ H1
0 (D),
b(v ) =Z
Df v dx.
Wir nehmen an, dass die Bedingungen (5.34) erfullt sind mit Γ1 = ∅, Γ2 = ∅. Damit ist die Bilinearform a
H10 (D) elliptisch, das heißt,
a(v, v ) ≥ θ||v ||2H1(D ) fur v ∈ H10 (D)
mit einer Konstanten θ > 0. Fur weitere Betrachtungen empfiehlt sich eine Operatornotation:
f : [0, T ] → L2(D), t 7→ f (·, t), u : [0, T ] → L2(D), t 7→ u(·, t),Lu : [0, T ] → L2(D), t 7→ (Lu)(·, t),
Es seien die folgenden Bedingungen erfullt:
• Es gilt u0 ∈ L2(D).
• Die Abbildung f : [0, T ] → L2(D) ist stetig.
(5.42)
Theorem 5.27 Seien die Bedingungen (5.42) erfullt, und es sei u : [0, T ] → L2(D) eine Losung von
(5.40) (5.41) mit u(t) ∈ H10 (D) fur t > 0. Dann gilt
||u(t) ||L2(D ) ≤ ||u0 ||L2(D )e−θt +
Z t
0||f (s) ||L2(D )e
−θ(t−s) ds fur 0 ≤ t ≤ T.
BEWEIS. Sei 0 ≤ t ≤ T fest gewahlt. Die Variationsgleichung (5.40) angewandt mit v = u(t) liefert
⟨⟨u ′(t), u(t)
⟩⟩
L2(D )+ a(u(t), u(t)) = 〈〈f (t), u(t)〉〉L2(D ). (5.43)
Wir schatzen nun beide Seiten der Identitat (5.43) geeignet ab. Fur die linke Seite der Identitat (5.43) erhalt
man
⟨⟨u ′(t), u(t)
⟩⟩
L2(D )+ a(u(t), u(t))
(∗)≥ ||u(t) ||L2(D )
ddt||u(t) ||L2(D ) + θ||u(t) ||2H1(D )
(∗∗)≥ ..........
.......... + θ||u(t) ||2L2(D ).
Die Abschatzung (∗) folgt aus der H10 (D) Elliptizitat der Bilinearform a sowie der Identitat
⟨⟨u ′(t), u(t)
⟩⟩
L2(D )=
12
ddt||u(t) ||2L2(D ) = ||u(t) ||L2(D )
ddt||u(t) ||L2(D ),
und die Abschatzung (∗∗) folgt aus der elementaren Abschatzung
||u(t) ||L2(D ) ≤ ||u(t) ||H1(D ).
Die rechte Seite in (5.43) kann man mit der Cauchy Schwarzschen Ungleichung abschatzen,
〈〈f (t), u(t)〉〉L2(D ) ≤ ||f (t) ||L2(D )||u(t) ||L2(D ).
Diese beiden Abschatzungen in (5.43) eingesetzt ergeben
||u(t) ||L2(D )ddt||u(t) ||L2(D ) + θ||u(t) ||H1(D )||u(t) ||L2(D ) ≤ ||f (t) ||L2(D )||u(t) ||L2(D ),

Abschnitt 5.3 W armeleitungsgleichung 91
und eine anschließende Division durch die Zahl ||u(t) ||L2(D ) ergibt die Differenzialungleichung
ddt||u(t) ||L2(D ) + θ||u(t) ||H1(D ) ≤ ||f (t) ||L2(D )
Es werden nun beide Seiten mit dem Faktor eθt versehen:
eθt ddt||u(t) ||L2(D ) + θeθt||u(t) ||H1(D ) =
ddt
(eθt||u(t) ||L2(D )
)≤ eθt||f (t) ||L2(D ).
Integration dieser Ungleichung von 0 bis t ergibt dann
eθt||u(t) ||L2(D ) − ||u(0) ||L2(D ) ≤Z t
0eθs||f (s) ||L2(D ) ds fur 0 ≤ t ≤ T.
Eine Multiplikation beider Seiten mit dem Faktor e−θt liefert die Aussage des Theorems.
Korollar 5.28 Seien die Bedingungen (5.42) erfullt. Dann existiert hochstens eine Losung u : [0, T ] →L2(D) von (5.40) (5.41) mit der Eigenschaft u(t) ∈ H1
0 (D) fur t > 0.
BEWEIS. Seien u1 und u2 zwei solche Losungen. Dann stellt die Differenz v = u1 − u2 eine Losung von
(5.40) (5.41) mit u0 ≡ 0 und f ≡ 0 dar. Aus Theorem 5.27 folgt dann v = u1 − u2 ≡ 0 beziehungsweise
u1 ≡ u2.

92 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
6 Stromungsverhalten von Fluiden – Mathematische
Modellierung
6.1 Einf uhrende Bemerkungen zur mathematischen Modellierung
Erstes Thema dieses Kapitels ist die mathematische Modellierung des Stromungsverhaltens von Fluiden,
wobei diese Bezeichnung fur Flussigkeiten und Gase aller Art verwendet wird. Diese mathematische Model-
lierung ist beispielsweise fur die Erstellung von Wetterprognosen oder das Flutungsverhalten nach Damm-
bruchen von Bedeutung. Anschließend wird zur Losung der entstehenden partielle Differenzialgleichungen
Anhand einer einfachen Situation ein numerisches Verfahren vorgestellt.
Es soll das Stromung eines Fluids in einem Bereich D ⊂ Rd mit d ∈ 1, 2, 3 und in einem gewissen
Zeitintervall von der Form t = 0 bis t = T analysiert werden. Dabei ist es nicht erforderlich, den Weg eines
jeden Partikels durch den betrachteten Bereich zu verfolgen. Es genugt, den Stromungszustand an allen
Orten und Zeiten zu beschreiben. Bei der mathematischen Beschreibung dieser Stromungszustande sind die
folgenden Großen von Bedeutung:
~u(~x, t) ∈ Rd Geschwindigkeitsvektor des Fluids im Punkt ~x ∈ D zur Zeit t,
%(~x, t) ≥ 0 Dichte des Fluids im Punkt ~x ∈ D zur Zeit t,
p(~x, t) ≥ 0 Fluiddruck im Punkt ~x ∈ D zur Zeit t,
µ(~x, t) ≥ 0 dynamische Zahigkeit des Fluids im Punkt ~x ∈ D zur Zeit t.
Dabei werden im weiteren Verlauf kartesische Koordinaten verwendet, mit den folgenden Notationen fur
die drei Situationen d = 1, d = 2 beziehungsweise d = 3:
fur d = 3 : ~x = (x, y, z ), ~u = (u, v, w),
fur d = 2 : ~x = (x, y ), ~u = (u, v ),
fur d = 1 : ~x = x, ~u = u.
Die Dimension der Geschwindigkeitskomponenten u, v und w ist jeweils Lange pro Zeiteinheit. Die Dichte
hat die Dimension Masse pro Volumen, und die dynamische Zahigkeit µ besitzt die Dimension (Lange)2
pro Zeiteinheit. Einige spezifische Großen fur die dynamische Zahigkeit sind in Tabelle 6.1 auf Seite 101
angegeben.
Vor der mathematischen Beschreibung des Verlaufs der Stromungen eines Fluids in dem betrachteten Be-
reich D ⊂ Rd sollen einige grundlegende Begriffe erlautert werden:
• Man unterscheidet zwischen kompressiblen und inkompressiblen Fluiden. Bei kompressiblen Fluiden
hangt die Dichte von außeren Einflussen ab und ist veranderlich, wahrend inkompressible Fluide eine be-
stimmte unveranderliche Dichte besitzen. Die Wasserdichte beispielsweise ist nahezu konstant und betragt
1000 kg pro m3. Der prozentuale Dichteunterschied zwischen Meer- und Sußwasser beispielsweise betragt
0.45%, und der prozentuale Dichteunterschied bei Wassertemperatur von 14 Celsius beziehungsweise 24
Celsius betragt 0.21% (Zielke/Mayerle [17]). Die großte Dichte besitzt Wasser bei 4 Celsius. Auch Gase

Abschnitt 6.2 Die Navier-Stokes-Gleichungen 93
sind bei Geschwindigkeiten unter 100m pro Sekunde nahezu inkompressibel. Die Luftdichte beispielsweise
betragt ungefahr 1.2 kg pro m3.
• Ein weitere bedeutende Eigenschaft von Fluiden ist ihre Zahigkeit, die auch als Viskositiat bezeichnet
wird. Beispielsweise handelt es sich bei Honig, Sirup oder Motorol um viskose Fluide. Ein Maß fur die
Zahigkeit stellt die bereits genannte dynamische Zahigkeit µ dar. Ein weiteres Maß dafur ist die dimen-
sionslose Reynoldszahl Re, die umgekehrt proportional zur dynamischen Zahigkeit ist. Große Werte der
dynamischen Zahigkeit µ beziehungsweise kleine Reynoldszahlen Re bedeuten eine hohe Viskositat, und
umgekehrt bedeuten kleine Werte der dynamischen Zahigkeit µ beziehungsweise große Reynoldszahlen Re
eine geringe Viskositat. Einige spezifische Großen fur die dynamische Zahigkeit sind in Tabelle 6.1 auf Seite
101 angegeben.
• Man unterscheidet zudem zwischen laminarer und turbolenter Stromung. Laminare Stromung bedeutet
schichtenweises Aneinandervorbeigleiten.
• Die gesamte vorgestellte Theorie wird als Stromungsmechanik bezeichnet. Die Stromungsmechanik
speziell der Flussigkeiten wird als Hydrodynamik, die der Gase als Gasdynamik oder auch als Aero-dynamik. Ein verwandtes Feld ist die Thermodynamik zur Beschreibung von orts- und zeitabhangigen
Warmeverteilungsablaufen.
6.2 Die Navier-Stokes-Gleichungen
6.2.1 Die allgemeine Form der Navier-Stokes-Gleichungen
Der Stromungsverlauf eines Fluids in dem betrachteten Bereich D ⊂ Rd beziehungsweise in einem Zeitin-
tervall von t = 0 bis t = T lasst sich mathematisch mit den Navier-Stokes-Gleichungen beschreiben. Im
dreidimensionalen Fall d = 3 handelt es sich dabei um ein System von vier partiellen Differenzialgleichun-
gen zweiter Ordnung fur den Druck p sowie die Komponenten u, v und w des Geschwindigkeitsfelds ~u. Die
konkrete Form dieser Differenzialgleichungen ist folgendermaßen:
∂%
∂t(~x, t) +
[ ∂ (%u)
∂x+
∂ (%v )
∂y+
∂ (%w)
∂z
](~x, t) = 0, (6.1)
∂ (%u)
∂t(~x, t) +
[u∂ (%u)
∂x+ v
∂ (%u)
∂y+ w
∂ (%u)
∂z
](~x, t) = f1(~x, t) − ∂p
∂x(~x, t),
+ µ[ ∂2u
∂x2 +∂2u
∂y2 +∂2u
∂z2
](~x, t) (6.2)
∂ (%v )
∂t(~x, t) +
[u∂ (%v )
∂x+ v
∂ (%v )
∂y+ w
∂ (%v )
∂z
](~x, t) = f2(~x, t) − ∂p
∂y(~x, t),
+ µ[ ∂2v
∂x2 +∂2v
∂y2 +∂2v
∂z2
](~x, t), (6.3)
∂ (%w)
∂t(~x, t) +
[u∂ (%w)
∂x+ v
∂ (%w)
∂y+ w
∂ (%w)
∂z
](~x, t) = f3(~x, t) − ∂p
∂z(~x, t),
+ µ[ ∂2w
∂x2 +∂2w
∂y2 +∂2w
∂z2
](~x, t) (6.4)
jeweils fur ~x ∈ D, 0 ≤ t ≤ T.
Die erste Gleichung (6.1) der Navier-Stokes-Gleichungen resultiert aus dem Prinzip der Massenerhaltung,
und die anderen Gleichungen (6.2) (6.4) der Navier-Stokes-Gleichungen folgen aus dem Prinzip der Impul-serhaltung in Richtung der drei Koordinatenachsen. Herleitungen dieser Prinzipien werden in Abschnitten

94 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
6.3 und 6.4 vorgestellt. Zuvor sollen beispielsweise noch die weiteren in den Navier-Stokes-Gleichungen
verwendeten Notationen erlautert werden: es bezeichnet die Zahl µ die dynamische Zahigkeit des betrach-
teten Fluids, und
~f (~x, t) ∈ R3 fur ~x ∈ D, 0 ≤ t ≤ T, mit ~f = (f1, f2, f3 )
bezeichnet die im Ort ~x zur Zeit 0 ≤ t ≤ T wirkenden außeren Krafte. Beispielsweise kann sich ~f aus
der nach unten wirkenden Schwerkraft und der bestehenden Rotationskraft zusammensetzen, wobei letztere
auch als Coriolis Kraft bezeichnet wird. In dieser Situation hat ~f die folgende Form:
~f (~x, t) = %(~x, t)
0
0
−g
+ 2ω%(~x, t)
v sin θ − w cos θ
−u sin θ
u cos θ
,
wobei g = 9.81m/s2 die Schwerebeschleunigung bezeichnet, und ω = 72.9 · 10−6 ist die Winkelgeschwin-
digkeit der Erde im Bogenmaß pro Sekunde, und θ ∈ [−π, π ] bezeichnet den lokalen Breitengrad.
6.2.2 Navier-Stokes-Gleichungen in koordinatenfreier Schreibweise
Eine ubliche koordinatenfreie Schreibweise fur die Navier-Stokes-Gleichungen (6.1) (6.4) ist
∂%
∂t+ ∇ · (%~u) = 0, (6.5)
∂ (%~u)
∂t+ (~u · ∇)(%~u) = ~f −∇p + µ∆~u (6.6)
mit den vier folgenden Abkurzungen:
• ∇·(%~u) fur das skalare Produkt des Nabla Operators mit dem Ausdruck Dichte × Geschwindigkeitsfeld
%~u,
∇ · (%~u) =∂ (%u)
∂x+
∂ (%v )
∂y+
∂ (%w)
∂z,
• ~u · ∇ fur das skalare Produkt des Geschwindigkeitsfelds ~u mit dem Nabla Operator,
~u · ∇ = u∂
∂x+ v
∂
∂y+ w
∂
∂z,
• ∇p fur den Gradienten des Drucks p,
∇p = (∂p
∂x,∂p
∂y,∂p
∂z)>,
• ∆~u fur den Laplace Operator fur das Geschwindigkeitsfeld ~u,
∆~u =∂2~u
∂x2 +∂2~u
∂y2 +∂2~u
∂z2 =
∂2u
∂x2 +∂2u
∂y2 +∂2u
∂z2
∂2v
∂x2 +∂2v
∂y2 +∂2v
∂z2
∂2w
∂x2 +∂2w
∂y2 +∂2w
∂z2
.
6.2.3 Anfangs- und Randstromung
Zur vollstandigen Beschreibung der Fluidstromung sind noch Anfangs- und Randbedingungen fur das Ge-
schwindigkeitsfeld der Stromung erforderlich. Anfangsbedingungen sind von der Form
~u(~x, 0) = ~u0(~x) fur ~x ∈ D,

Abschnitt 6.2 Die Navier-Stokes-Gleichungen 95
wobei diese noch die erste Gleichung (6.1) der Navier-Stokes-Gleichungen erfullen sollen.
Bei raumlichen Bereichen D mussen fur jeden Randpunkt
~x ∈ Γ := ∂D
fur alle betrachteten Zeiten t ∈ [0, T ] drei skalare Randbedingungen vorgegeben werden. Einige typische
Randbedingungen sollen im Folgenden vorgestellt werden. Vorbereitend sei hierfur die senkrecht zur Ober-
flache, nach außen gerichtete Komponente des Geschwindigkeitsfelds der Stromung mit
ϕn(~x, t)
bezeichnet. Weiter seien die Komponenten des Geschwindigkeitsfelds der Stromung in Richtung zweier
tangential zur Oberflache stehenden Richtungen mit
ϕt1(~x, t), ϕt2
(~x, t)
bezeichnet. Die Funktionen hangen von der speziellen Wahl der Tangenten ab. Im Folgenden werden typi-
sche Randbedingungen beschrieben.
(i) (Vorgegebenes Geschwindigkeitsfeld der Stromung ) Die Geschwindigkeitsfeld der Stromung ist
vorgegeben,
~u(~x, t) = ~u1(~x, t) fur t ∈ [0, T ], (6.7)
mit gegebenen Vektor ~u1(~x, t) ∈ R3. Falls der Vektor ~u(~x, t) zur Zeit t in das Innere des Bereichs D
gerichtet ist, was gleichbedeutend mit der Vorzeichenbedingung ϕn(~x, t) < 0 ist, so liegt eine Einstromungvor. Ist dagegen der Vektor ~u(~x, t) in das Außere des Bereichs D gerichtet, was gleichbedeutend mit der
Vorzeichenbedingung ϕn(~x, t) > 0 ist, so handelt es sich um Ausstromung.
Ein Spezialfall von (6.7) stellt die Bedingung
~u(~x, t) = 0 fur t ∈ [0, T ]
dar. In dieser Situation befindet sich das Fluid im betrachteten Randpunkt ~x in Ruhe, man spricht dann von
einer Haftbedingung.
(ii) (Stromung entlang der Oberflache ) Es findet keine Ein- und auch keine Ausstromung statt, und die
beiden Komponenten der Geschwindigkeitsfeld der Stromung tangential zur Oberflache sind vorgegeben:
ϕn(~x, t) = 0, ϕt1(~x, t) = ϕ0
t1, ϕt2
(~x, t) = ϕ0t2.
Anstelle der beiden tangential zur Oberflache wirkenden Komponenten der Geschwindigkeitsfeld der Stromung
lassen sich auch deren Anderungen in Normalenrichtung vorgeben:
ϕn(~x, t) = 0,∂ϕt1
∂~n(~x, t) = ϕ1
t1,
∂ϕt2
∂~n(~x, t) = ϕ1
t2.
Der spezielle Fall ϕ1t1
= ϕ1t2
= 0 bedeutet fehlende Reibung, man spricht dann von Rutschbedingungen.
Auf Seite 99 werden Randbedingungen fur ebene Bereiche D ⊂ R2 angegeben.

96 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
6.2.4 Spezialfalle der Navier-Stokes-Gleichungen
Es sollen nun einige Spezialfalle fur Stromungen vorgestellt werden, die jeweils zu Vereinfachung der
Navier-Stokes-Gleichungen fuhren:
• Fur inkompressible Fluide ist die Dichte % unabhangig von Ort und Zeit. Insbesondere gilt daher∂%
∂t= 0.
• Der in den Navier-Stokes-Gleichungen (6.1) (6.4) allgemeine Fall der Zeitabhangigkeit der betrachteten
Zustandsgroßen Geschwindigkeitfeld, Druck und Dichte bezeichnet man als instationare Stromung. Sind
dagegen alle auftretenden Großen zeitunabhangig, so spricht man von stationarer Stromungen. Insbeson-
dere fallen in den Navier-Stokes-Gleichungen (6.1) (6.4) die Terme mit Zeitableitungen weg.
• Bei nicht-viskosen Fluiden ist µ = 0, und dann verschwinden in den letzten drei der Navier-Stokes-
Gleichungen die Terme mit ∆u, ∆v und ∆w. Die entstehenden partiellen Differenzialgleichungen erster
Ordnung bezeichnet man als Eulersche Differenzialgleichungen.
6.3 Das Prinzip der Massenerhaltung
Die Navier-Stokes-Gleichungen stellen eine Sammlung von Erhaltungsprinzipien dar, der Massenerhal-
tung sowie der Impulserhaltung bezuglich der drei Koordinatenachsen. In diesem und dem nachfolgenden
Abschnitt sollen diese Erhaltungsprinzipien erlautert werden.
Die erste der vier Navier-Stokes-Gleichungen, dies ist
∂%
∂t(~x, t) + [
∂ (%u)
∂x+
∂ (%v )
∂y+
∂ (%w)
∂z](~x, t) = 0 fur ~x ∈ D, 0 ≤ t ≤ T, (6.8)
wird als Kontinuitatsgleichung bezeichnet und beruht auf dem Prinzip der Massenerhaltung. Dieses Prinzip
wird im weiteren Verlauf fur ein durch einen Bereich D ⊂ R3 stromendes Fluid hergeleitet.
Hierzu wird im Zeitintervall von t = t∗ bis t = t∗ + ..................................................................................... t ein kleines Teilvolumen aus D in Form eines
kleinen Parallelotops betrachtet, welches parallel zu den Koordinatenachsen verlaufenden Kanten der je-
weiligen Lange ..................................................................................... x, ................
..................................................................... y und ................
..................................................................... z besitzt. Der Punkt ~x∗ = (x∗, y∗, z∗ ) sei eine der Ecken des Parallelotops.
Die vorliegende Situation ist in Abbildung 6.1 dargestellt.
Zur Vereinfachung der nachfolgenden Betrachtungen sei noch angenommen, dass alle auftretenden Ge-
schwindigkeiten und deren betrachteten Ortsableitungen positiv sind.
Als erstes soll diejenige Masse berechnet werden, die im Zeitintervall von t = t∗ bis t = t∗ + ..................................................................................... t durch
diejenige Flache einstromt, die den Punkt ~x∗ als einen Eckpunkt besitzt und die auf einer Seite durch die
y-Achse und auf einer anderen Seite durch die z-Achse begrenzt ist. In Abbildung 6.1 handelt es sich dabei
um die rechtsseitige Begrenzungsflache des Parallelotops.
Diese einstromende Masse betragtZ t∗+................
..................................................................... t
t∗
Z z∗+..................................................................................... z
z∗
Z y∗+..................................................................................... y
y∗
(%u)(x, t) dy dz dt = (%u)(~x∗, t∗ ) ..................................................................................... y ................
..................................................................... z ................
..................................................................... t + h.o.t. (6.9)
Hier ist h.o.t. eine Abkurzung fur higher order terms. Speziell gilt hier h.o.t. = O( ..................................................................................... y ................
..................................................................... z ................
..................................................................... t)2.
Ahnlich berechnet man diejenige Masse, die im Zeitintervall von t = t∗ bis t = t∗ + ..................................................................................... t durch diejenige
Flache ausstromt, die durch den Punkt ~x∗ + ( ..................................................................................... x, 0, 0) lauft und die parallel zu der eben betrachteten Flache
ist. Die durch diese Flache ausstromende Masse betragt
(%u)(x∗ + ..................................................................................... x, y∗, z∗, t∗ ) ................
..................................................................... y ................
..................................................................... z ................
..................................................................... t + h.o.t.
= [ (%u)(~x∗, t∗ ) +∂ (%u)
∂x(~x∗, t∗ )................
..................................................................... x ] ................
..................................................................... y ................
..................................................................... z ................
..................................................................... t + h.o.t. (6.10)

Abschnitt 6.4 Das Prinzip der Impulserhaltung 97
~x∗
.........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.. x...........................................................................................................................................................................................................................................................................................................................................................................................................................................................
................
z
....................................................................................................................................................................................................
................
y
................................ ................................
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆x
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆z
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆y
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp pppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppp
(%u)(~x∗, t∗)∆y∆z∆t
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppp
((%u)(~x∗, t∗) + ∂(%u)
∂x(~x∗, t∗)∆x)∆y∆z∆t
Abbildung 6.1: Veranschaulichung zur Kontinuitatsgleichung. Es ist (%u)(~x∗, t∗)∆y∆z∆t + h.o.t. die-
jenige Fluidmasse, die durch die linke Flache in der Zeit von t = t∗ bis t = t∗ + ∆t ein das
Kontrollvolumen einstromt. Auf der gegenuberliegenden Seite stromt im gleichen Zeitraum die Menge
((%u)(~x∗, t∗) + ∂(%u)
∂x(~x∗, t∗)∆x)∆y∆z∆t+ h.o.t. aus.
Subtraktion der betrachteten einstromenden Menge (rechten Seite in (6.9)) von der betrachteten ausstromen-
den Menge (rechte Seite in (6.10)) fuhrt auf
∂ (%u)
∂x(~x∗, t∗ )................
..................................................................... x ................
..................................................................... y ................
..................................................................... z ................
..................................................................... t + h.o.t., (6.11)
was gerade die Massenabnahme durch die ein- und ausstromende Menge durch die beiden betrachteten
Flachen bedeutet.
Ahnlich verfahrt man mit den anderen Flachen und erhalt so die Massenabnahme im Zeitintervall von t = t∗
bis t = t∗ + ..................................................................................... t in dem betrachteten Parallelotop:
[∂ (%u)
∂x+
∂ (%v )
∂y+
∂ (%w)
∂z](~x∗, t∗ )................
..................................................................... x ................
..................................................................... y ................
..................................................................... z ................
..................................................................... t + h.o.t. (6.12)
Die Gesamtabnahme der Massen in dem Parallelotop in der Zeit zu den genannten Zeiten betragt aber auch
[%(~x∗, t) − %(~x∗, t+ ..................................................................................... t) ]..........................
........................................................... x ................
..................................................................... y ................
..................................................................... z + h.o.t. (6.13)
Gleichsetzen der Terme in (6.12) und (6.13) sowie eine Division durch ..................................................................................... x ................
..................................................................... y ................
..................................................................... z ................
..................................................................... t liefert die Konti-
nuitatsgleichung versehen mit einem Fehlerterm h.o.t. Dieser wird eliminiert durch einen abschließenden
Grenzubergang ..................................................................................... x + ................
..................................................................... y + ................
..................................................................... z + ................
..................................................................... t→ 0 und fuhrt auf die Kontinuitatsgleichung (6.8).
6.4 Das Prinzip der Impulserhaltung
Im weiteren Verlauf wird das zweite Newtonsche Gesetz herangezogen. Bei inkompressible Fluiden lautet
dies “Masse × Beschleunigung = wirkenden Krafte“, andernfalls “ Anderung von (Masse × Geschwind-
keit ) pro Zeiteinheit = wirkenden Krafte“ Dieses angewandt in Bezug auf die x-Richtung, y-Richtung sowie
die z-Richtung liefert gerade die die Gleichungen (6.2) (6.4) in den Navier-Stokes-Gleichungen. Dabei kor-
respondieren die linken Seiten jeweils zur Masse × Beschleunigung und die jeweiligen rechten Seiten die

98 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
in die jeweiligen Richtungen wirkenden Krafte widerspiegeln. Haufig werden auch nur die drei Gleichungen
(6.2) (6.4) als Navier-Stokes-Gleichungen bezeichnet.
Im Folgenden soll die zeit , orts und richtungsabhangige Beschleunigung des Fluids als Funktion des
Geschwindigkeitsfelds ~u dargestellt werden. Hierzu bezeichne
Ψ(t) = (x(t), y(t), z(t))
die Bahn desjenigen Fluidspartikels, das sich zu einer bestimmten Zeit t∗ in einem ausgewahlten Punkt
~x∗ = (x∗, y∗, z∗ ) ∈ D befindet. Es gilt also insbesondere
Ψ(t∗ ) = ~x∗.
Die Geschwindigkeitsvektor des Fluids in dem Punkt ~x∗ zur Zeit t∗ betragt
(u, v, w )︸ ︷︷ ︸
= ~u
(~x∗, t∗ ) = lim∆t→0
Ψ(t∗ + ∆t) − Ψ(t∗ )
∆t=
ddt
Ψ(t)|t=t∗ = ( x(t∗ ), y(t∗ ), z(t∗ )). (6.14)
Dazu wird noch die Bewegung ein kleines Kontrollvolumens aus D in Form eines kleinen Parallelotops mit
den Kantenlangen ..................................................................................... x, ................
..................................................................... y und ................
..................................................................... z herangezogen und dessen Bewegung im Zeitintervall von t = t∗ bis t =
t∗ + ..................................................................................... betrachtet. Zur Zeit t = t∗ befinde sich eine der Ecken des Parallelotops im Punkt ~x∗ = (x∗, y∗, z∗ )
sei eine der Ecken des Parallelotops. Die vorliegende Situation ist in Abbildung 6.2 dargestellt.
Ψ(t∗ ) = ~x∗
......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.. x..................................................................................................................................................................................................................................................................................................................................................................................................
................
z
.................................................................................................................................................................................................................................................................................................................
................
y
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆x
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆z
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
∆y
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp pppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
Ψ(t∗ + ∆t)
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp ppppppppppppp pppppppppppppppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
ppppppppppppp
pppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppppp
ppppppppppppppppppppppppppppppppppppppppppppppppppppppppΨ(t)
Abbildung 6.2: Darstellung der Bewegung eines kleinen Kontrollvolumens. Zur Zeit t∗ besitzt es in x–
Richtung den Impuls (%u)(x∗, t∗). Der entsprechende Wert zum Zeitpunkt t∗ + ∆t ist in (6.15) angegeben.
Der Impuls des betrachteten Kontrollvolumens, also deren Beschleunigung multipliziert mit deren Masse
hat in dem Punkt ~x∗ zur Zeit t∗ in x-Richtung folgenden Wert:[
lim..................................................................................... t→0
(%u)(Ψ(t∗ + ..................................................................................... t), t∗ + ................
..................................................................... t ) − (%u)(~x∗, t∗ )
..................................................................................... t
]
..................................................................................... x................
..................................................................... y................
..................................................................... z =
[ ddt
(%u)(Ψ(t), t)∣∣t=t∗
]..................................................................................... x................
..................................................................... y................
..................................................................... z
=[∂ (%u)
∂t(~x∗, t∗ ) + x(t∗ )
∂ (%u)
∂x(~x∗, t∗ ) + y(t∗ )
∂ (%u)
∂y(~x∗, t∗ ) + z(t∗ )
∂ (%u)
∂z(~x∗, t∗ )
]
..................................................................................... x................
..................................................................... y................
..................................................................... z
=[∂ (%u)
∂t(~x∗, t) + [u
∂ (%u)
∂x+ v
∂ (%u)
∂y+ w
∂ (%u)
∂z](~x∗, t)
]
..................................................................................... x................
..................................................................... y................
..................................................................... z, (6.15)
wobei die Kettenregel und die Identitat (6.14) verwendet wurden.

Abschnitt 6.5 Inkompressible ebene Str omungen 99
6.5 Inkompressible ebene Stromungen
6.5.1 Die Navier-Stokes-Gleichungen f ur ebene Stromungen
Der Stromungsverlaufs eines inkompressiblen Newtonschen Fluids in einem ebenen D ⊂ R2 in einem Zei-
tintervall von t = 0 bis t = T wird durch die inkompressible 2D-Navier-Stokes-Gleichungen beschrieben.
Diese ergibt sich aus den raumlichen Navier-Stokes-Gleichungen durch Streichung der Impulserhaltungs-
gleichung (6.4) fur die vertikale Stromungsgeschwindigkeitskompomente w, und in den verbleibenden drei
Gleichungen, also der Kontinuitatsgleichung sowie den Impulserhaltungsgleichungen (6.3) (6.4) sind alle
Summanden zu streichen, in denen die vertikalen Komponente w der Geschwindigkeitsfeld der Stromung
auftritt. Daraus erhalt man ein System von drei partiellen Differenzialgleichungen zweiter Ordnung fur den
Druck p sowie die Komponenten u und v des Geschwindigkeitsfelds ~u. Die konkrete Form dieser Differen-
zialgleichungen lautet folgendermaßen:
[∂u
∂x+
∂v
∂y](x, y, t) = 0, (6.16)
%∗[∂u
∂t+ u
∂u
∂x+ v
∂u
∂y](x, y, t) = f1(x, y, t) − ∂p
∂x(x, y, t) + µ[
∂2u
∂x2 +∂2u
∂y2 ](x, y, t), (6.17)
%∗[∂v
∂t+ u
∂v
∂x+ v
∂v
∂y](x, y, t) = f2(x, y, t) − ∂p
∂y(x, y, t), + µ[
∂2v
∂x2 +∂2v
∂y2 ](x, y, t), (6.18)
jeweils fur ~x ∈ D, 0 ≤ t ≤ T.
Anfangsbedingungen sind von der Form
~u(~x, 0) = ~u0(~x) fur ~x ∈ D, (6.19)
wobei diese noch die Gleichung (6.16) erfullen sollen. Zudem sind fur jeden Randpunkt und betrachteten
Zeiten Randbedingungen vorzugeben.
Beispiel 6.1 Im Fall eines Bereichs D von rechteckiger Gestalt mit achsenparallelen Kanten, erhalt man am
linken Rand
ϕn = −u, ϕt = v,∂ϕn
∂~n= −∂u
∂x,
∂ϕt
∂~n= −∂v
∂x,
und am rechten Rand ergibt sich
ϕn = u, ϕt = v,∂ϕn
∂~n=
∂u
∂x,
∂ϕt
∂~n= −∂v
∂x.
Weiter gilt am oberen Rand
ϕn = v, ϕt = u,∂ϕn
∂~n=
∂v
∂y,
∂ϕt
∂~n=
∂u
∂y.
und am unteren Rand ergibt sich schließlich
ϕn = −v, ϕt = u,∂ϕn
∂~n= −∂v
∂y,
∂ϕt
∂~n= −∂u
∂y.
Die Situation ist in Abbildung 6.3 veranschaulicht.M
6.5.2 Auskopplung des Drucks
Mittels der ebenen Kontinuitatsgleichung (6.16) lasst sich fur eine fixierte Zeit t aus der Kenntnis des Ge-
schwindigkeitsfelds ~u(·, t) : D → R2 der Druck p(·, t) : D → R ermitteln, wie sich herausstellen wird. Zu

100 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
a b
c
d
...............................................................................................................................................
.. x
....
.....
....
.....
.....
....
.....
....
.....
.....
....
.....
.....
....
.....
....
..................
................
y
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
....
.....
....
.....
....
.....
....
.....
.....
.....
....
.....
...
.................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................................................................
D
ϕn = −v ϕt = u∂ϕn
∂~n= −∂v
∂y,
∂ϕt
∂~n= −∂u
∂y
ϕn = v, ϕt = u
∂ϕn
∂~n=
∂v
∂y,
∂ϕt
∂~n=
∂u
∂y
ϕn = −uϕt = v
∂ϕn
∂~n= −∂u
∂x
∂ϕt
∂~n=
∂v
∂x
ϕn = u
ϕt = v∂ϕn
∂~n=
∂u
∂x
∂ϕt
∂~n= −∂v
∂x.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Abbildung 6.3: Darstellung der Zusammenhange zwischen den Großen ϕn und ϕt einerseits und dem
Geschwindigkeitsfeld der Stromung andererseits, fur einen Bereich von der Form D = [a, b] × [c, d].
diesem Zweck schreibt man die Impulserhaltungsgleichung (6.17) (6.18) in der Form
%∗∂u
∂t(x, y, t) = F (x, y, t) − ∂p
∂x(x, y, t) (6.20)
%∗∂v
∂t(x, y, t) = G(x, y, t) − ∂p
∂y(x, y, t) fur (x, y ) ∈ D (6.21)
mit den Notationen
F (x, y, t) = −%∗[u∂u∂x + v∂u
∂y](x, y, t) + f1(x, y, t) + µ[
∂2u
∂x2 +∂2u
∂y2 ](x, y, t), (6.22)
G(x, y, t) = −%∗[u∂v∂x + v∂v
∂y](x, y, t) + f2(x, y, t) + µ[
∂2v
∂x2 +∂2v
∂y2 ](x, y, t). (6.23)
Partielle Differentiation der Gleichung (6.20) nach der Variablen x und der Gleichung (6.21) nach der Va-
riablen y sowie eine anschließende Addition der beiden Resultate liefert zusammen mit der nach der Zeit t
abgeleiteten 2D-Kontinuitatsgleichung (6.16) ∂2u∂x∂t
+∂2v∂y ∂t
= 0 Folgendes,
[∂2p
∂x2 +∂2p
∂y2 ](x, y, t) = [∂F
∂x+
∂G
∂y](x, y, t) fur (x, y ) ∈ D. (6.24)
Diese Gleichung stellt eine Poisson Gleichung fur den Druck p zur Zeit t dar. Fur eine eindeutige Losung
werden noch Randdaten fur den Druck benotigt. Diese ergeben sich in Form von Neumann-Randdaten
unmittelbar aus den Gleichungen (6.20) und (6.21),
∂p
∂~n(x, y, t) = [
∂p
∂xn1 +
∂p
∂yn2 ](x, y, t)
= [Fn1 + Gn2 ](x, y, t) − %∗[∂u
∂tn1 +
∂v
∂tn2 ](x, y, t)
fur (x, y ) ∈ D. fur (x, y ) ∈ Γ = ∂D.
(6.25)

Abschnitt 6.6 Reynoldszahl 101
Hierbei bezeichnet ~n = (n1, n2 ) den außeren Normalenvektor im Randpunkt (x, y ).
Die in (6.25) benotigten Zeitableitungen fur das Geschwindigkeitsfeld ~u der Stromung auf dem Rand des
Bereichs D muss man sich aus gegebenen Randdaten fur ~u verschaffen. Beispielsweise verschwinden im
Falle von Haftbedingungen in einem Punkt x, y ∈ Γ dort die Zeitableitungen des Geschwindigkeitsfelds ~u
der Stromung,∂u
∂t(x, y, t) =
∂v
∂t(x, y, t) = 0 fur t ∈ [0, T ].
6.6 Reynoldszahl
Im Folgenden wird wieder ein inkompressibles Fluid in einem Bereich D ⊂ Rd betrachtet. Die Zahl
Re :=%∗u∗L
µ
wird als Reynoldszahl bezeichnet. Hierbei werden die folgenden Notationen verwendet:
• L korrespondiert zur Große des betrachteten Bereichs D ⊂ Rd. Im eindimensionalen Fall d = 1 kann
dies beispielsweise die Lange des Bereichs D sein. Im zweidimensionalen Fall d = 2 kann L beispiels-
weise die Flache von D sein, und im dreidimensionalen Fall d = 3 kann es sich dabei um das Volumen
von D handeln.
• Die Zahl u∗ bezeichnet eine Grundgeschwindigkeitd des betrachteten Fluids.
• Es ist %∗ ist die Dichte des inkompressiblen Fluids, und µ ist die als konstant angenommene dynamische
Zahigkeit.
Die Reynoldszahl ist eine dimensionslose Große.
6.7 Einige Erganzungen
6.7.1 Einige Werte f ur die kinematische Zahigkeit µ
In der folgenden Tabelle sind einige gangige Werte der dynamische Zahigkeit µ aufgefuhrt. Weitere Werte
sind beispielsweise in Prandtl / Oswatitsch /Wieghardt [15] angegeben.
Wasser bei 0 C µ = 0.018 cm2/s
Wasser bei 100 C µ = 0.03 cm2/s
Quecksilber bei 0 C µ = 0.00125 cm2/s
Glyzerin bei 20 C µ = 6.8 cm2/s
Luft bei 0 C und 0.01 bar µ = 13.3 cm2/s
Luft bei 0 C und 1 bar µ = 0.133 cm2/s
Luft bei 0 C und 100 bar µ = 0.001133 cm2/s
Tabelle 6.1 Einige Werte fur die kinematische Zahigkeit µ
6.7.2 Nicht-Newtonsche Fluide
Die vorgestellte mathematische Modellierung mit den sich ergebenden Navier-Stokes-Gleichungen gilt fur
Newtonsche Fluide, bei der die Reibungsspannungen lediglich vom aktuellen Bewegungszustand abhangen.

102 Kapitel 6 Str omungsverhalten – Mathematische Modellierung
Neben diesen bereits betrachteten Fluiden existieren noch Nicht-Newtonsche Fluide, das sind Fluide mit
Gedachtnis wie flussiger Teer, Magma oder Blut. . .

Literaturverzeichnis 103
Literaturverzeichnis
[1] AVELLANEDA, M.: Quntitative Analysis in Financial Markets. World Scientific, Singapore, 1. Auflage, 2001.
[2] CANNON, J. R.: The One-Dimensional Heat Equation. Addison-Wesley, Reading, 1. Auflage, 1984.
[3] FRIEDMAN, A.: Partial Differential Equations of Parabolic Type. Prentice Hall, Englewood-Cliffs, 1. Auflage,1964.
[4] GERSTEN, K.: Einfuhrung in die Stromungsmechanik. Vieweg, Braunschweig/Wiesbaden, 6. Auflage, 1991.
[5] GRIEBEL, M., T. DORNSEIFER und T. NEUNHOEFFER: Numerische Simulation in der Stromungsmechanik.Vieweg, Braunschweig/Wiesbaden, 1. Auflage, 1995.
[6] HACKBUSCH, W.: Integral Equations. Birkh auser, Basel, 1. Auflage, 1995.
[7] HANKE-BOURGEOIS, M.: Grundlagen der Numerischen Mathematik. Teubner, Stuttgart, 1. Auflage, 2002.
[8] (HRSG.), H. OERTEL JR.: Prandtl-Fuhrer duch die Stromungslehre. Vieweg, Braunschweig/Wiesbaden,10. Auflage, 2001.
[9] HUNT, P. J. und J. E. KENNEDY: Financial Derivatives in Theory and Practice. Wiley, New York, 1. Auflage,2000.
[10] JOHN, F.: Partial Differential Equations. Springer, New York, 4. Auflage, 1986.
[11] KNABNER, P. und L. ANGERMANN: Numerik partieller Differentialgleichungen. Springer-Verlag, Berlin, Hei-delberg, 1. Auflage, 2000.
[12] KRESS, R.: Linear Integral Equations. Springer-Verlag, Berlin, Heidelberg, New York, 1. Auflage, 1989.
[13] KWOK, Y.-K.: Mathematical models of financial derivatives. Springer, Singapore, 1. Auflage, 1998.
[14] LEVINE, H.: Partial Differential Equations. AMS, Providence, Rhode Island, 1. Auflage, 1997.
[15] PRANDTL, L., K. OSWATITSCH und K. WIEGHARDT: Fuhrer duch die Stromungslehre. Vieweg, Braunschweig/Wiesbaden, 9. Auflage, 1990.
[16] WILMOTT, P., J. DEWYNNE und S. HOWISON: Option Pricing. Oxford Financial Press, Oxford, 1. Auflage,1994.
[17] ZIELKE, W. und R. MAYERLE: Kustengewasser. In: ZIELKE, W. (Herausgeber): Numerische Modelle vonFlussen, Seen und Kustengewassern, Bonn, 1999. Deutscher Verband f ur Wasserwirtschaft und Kulturbau.
Related Documents