The Bionic Arm The Bionic Arm By Leslie By Leslie Chataway Chataway and and Christine Honey Christine Honey

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
The Bionic ArmThe Bionic Arm
By Leslie By Leslie ChatawayChatawayandand
Christine HoneyChristine Honey
22
BIONIC ARMBIONIC ARM
MechanicsMechanicsControlControlCurrentCurrentNew DevelopmentsNew DevelopmentsFuture Directions…Future Directions…

JOINTS / ArticulationsJOINTS / Articulations
ClassificationClassification Structure/Structure/MovementMovement
ExamplesExamples
SynarthrodialSynarthrodial(immovable)(immovable)
Bones fused Bones fused togethertogether
Cranial bonesCranial bones
AmphiarthrodialAmphiarthrodial(slightly moveable)(slightly moveable)
Slight movement, Slight movement, fibrocartilage disk fibrocartilage disk separates bonesseparates bones
VertebraeVertebraeTibiofibular Tibiofibular jointjointSacroiliac jointSacroiliac joint
Diarthrodial Diarthrodial (freely moveable)(freely moveable)
Inelastic ligaments Inelastic ligaments cross and hold joint cross and hold joint in placein place
All other joints All other joints in body!in body!
44
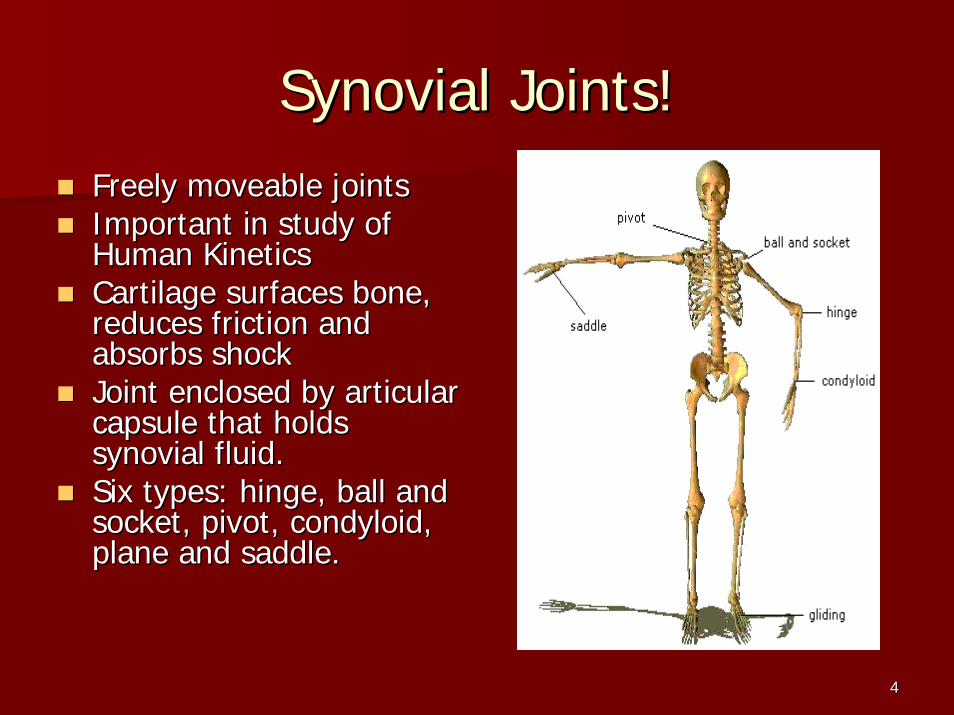
Synovial Joints!Synovial Joints!Freely moveable jointsFreely moveable jointsImportant in study of Important in study of Human KineticsHuman KineticsCartilage surfaces bone, Cartilage surfaces bone, reduces friction and reduces friction and absorbs shockabsorbs shockJoint enclosed by articular Joint enclosed by articular capsule that holds capsule that holds synovial fluid.synovial fluid.Six types: hinge, ball and Six types: hinge, ball and socket, pivot, condyloid, socket, pivot, condyloid, plane and saddle.plane and saddle.

55
Synovial Joints in the Human ArmSynovial Joints in the Human Arm
TypeType MovementMovement ExampleExamplePivotPivot Rotation, uniaxialRotation, uniaxial Radioulnar Radioulnar
HingeHinge Uniaxial Uniaxial movementmovement
ElbowElbow
CondyloidCondyloid Angular biaxial Angular biaxial movementmovement
WristWrist((metacarpophalangeal jointmetacarpophalangeal joint) )
Ball and SocketBall and Socket Triaxial Triaxial movement with movement with great ROMgreat ROM
ShoulderShoulder
ROM: Range Of Motion
66
Classification of MovementClassification of Movement
LinearLinear -- simplest movement that can simplest movement that can occur in a joint. Occurs in gliding occur in a joint. Occurs in gliding synovial joints. synovial joints.
AngularAngular -- motion occurs between the long motion occurs between the long bones of the arm, and spinal bones of the arm, and spinal column. column. -- angle between two bones is angle between two bones is increased or decreasedincreased or decreased
77
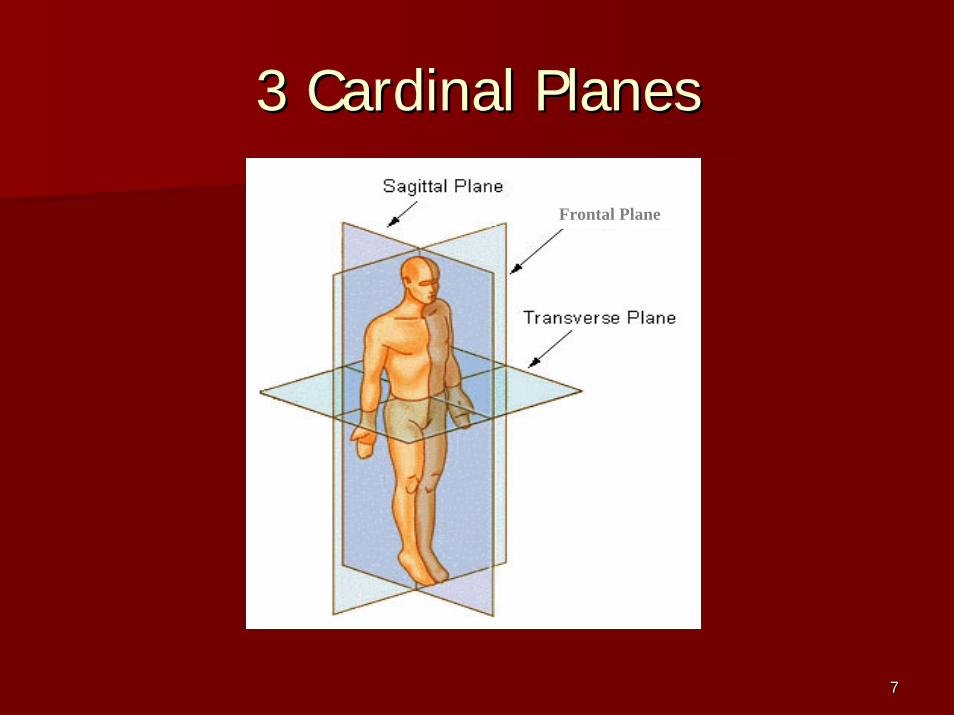
3 Cardinal Planes3 Cardinal Planes
Frontal Plane

88
Linear Motion in Cardinal PlanesLinear Motion in Cardinal Planes
Sideward motion Sideward motion –– travel along x axistravel along x axis(movement in transverse plane)(movement in transverse plane)
Vertical motion Vertical motion –– travel along y axistravel along y axis(movement in frontal plane)(movement in frontal plane)
For/Aft motion For/Aft motion –– travel alongtravel alongz axisz axis
(movement in sagittal plane)(movement in sagittal plane) X
Y
Z

99
Angular Movement in Cardinal Planes:Angular Movement in Cardinal Planes:
Angular Movement occurs in the cardinal planes Angular Movement occurs in the cardinal planes about an axis.about an axis.
Flexion/Flexion/ExtensionExtension
Abduction/ Abduction/ AdductionAdduction
Medial/Medial/Lateral Lateral RotationRotation
CircumductionCircumduction
Forward and Forward and backward movement backward movement of the arm in the of the arm in the sagittal plane, about sagittal plane, about a frontal axis.a frontal axis.Horizontal occurs in Horizontal occurs in
transverse plane transverse plane about a longitudinal about a longitudinal axis.axis.
Sideward raising and Sideward raising and lowering of the arm in the lowering of the arm in the frontal plane about a frontal plane about a sagittal axis.sagittal axis.
Arm rotates inward Arm rotates inward and outward in and outward in transverse plane about transverse plane about a longitudinal axis.a longitudinal axis.
Involves flexion/extension Involves flexion/extension abduction and adduction abduction and adduction performed in sequence in performed in sequence in both sagittal and frontal both sagittal and frontal planeplane
1010
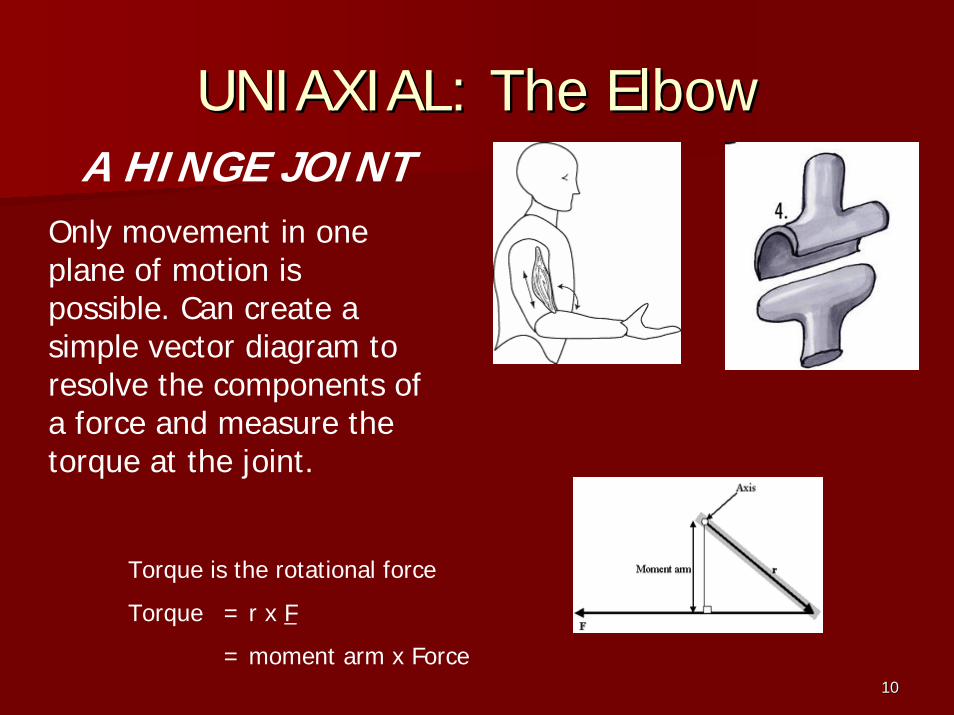
UNIAXIAL: The ElbowUNIAXIAL: The ElbowA HINGE JOINT
Only movement in one plane of motion is possible. Can create a simple vector diagram to resolve the components of a force and measure the torque at the joint.
Torque is the rotational force
Torque = r x F
= moment arm x Force
1111
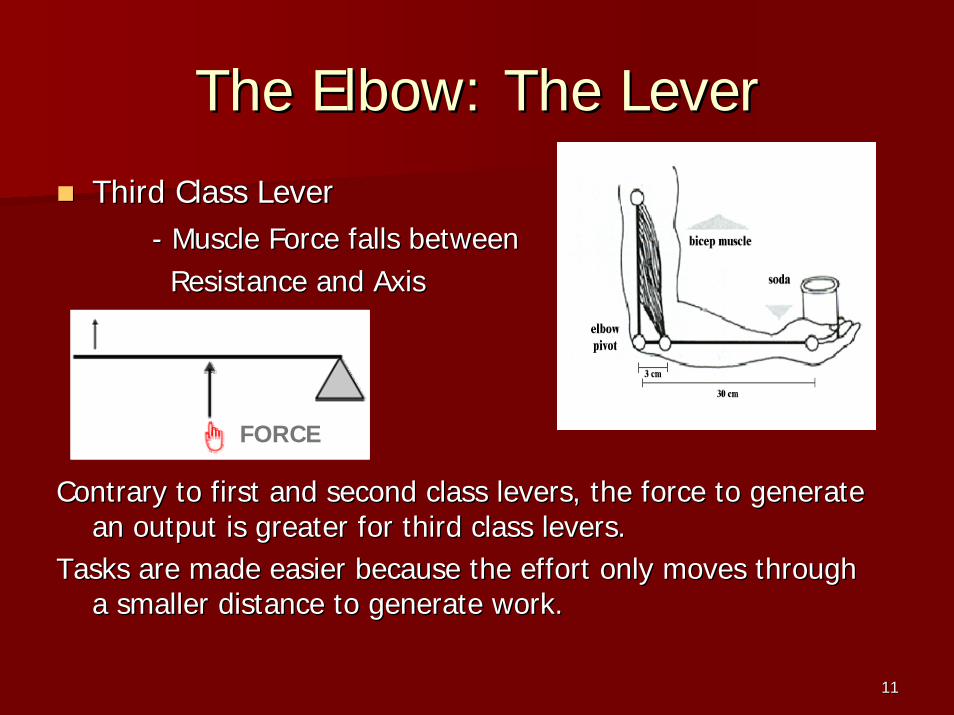
The Elbow: The LeverThe Elbow: The Lever
Third Class LeverThird Class Lever-- Muscle Force falls between Muscle Force falls between Resistance and AxisResistance and Axis
Contrary to first and second class levers, the force to generateContrary to first and second class levers, the force to generatean output is greater for third class levers. an output is greater for third class levers.
Tasks are made easier because the effort only moves through Tasks are made easier because the effort only moves through a smaller distance to generate work.a smaller distance to generate work.
FORCE

1212
Force DiagramForce DiagramThe biceps force is broken down into a tangential and a radial force, these move and stabilize the joint respectively.
1313
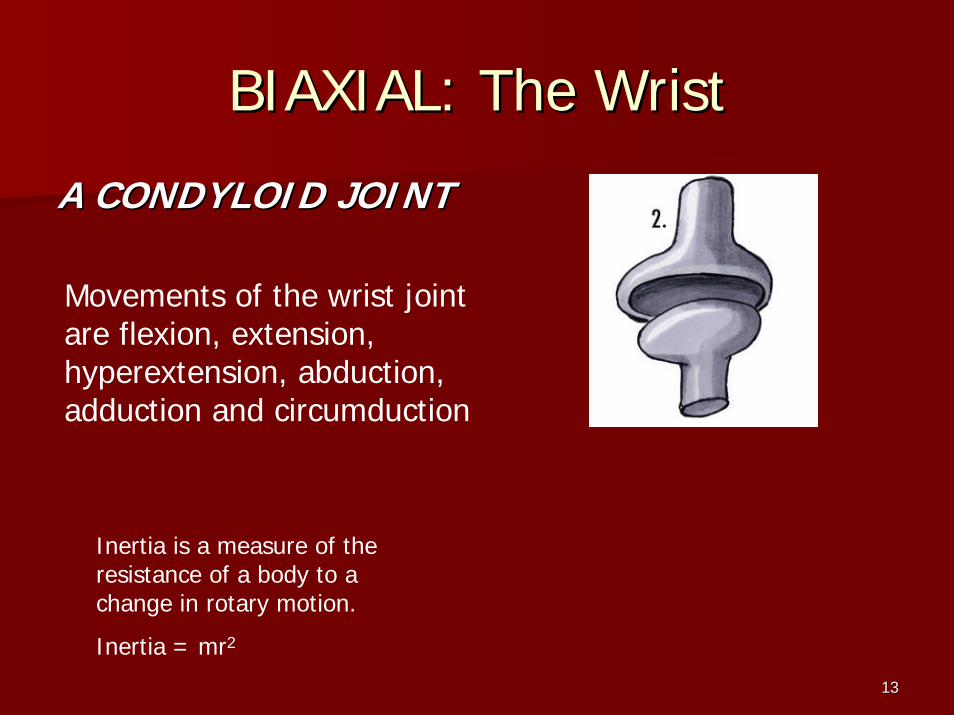
BIAXIAL: The WristBIAXIAL: The Wrist
A CONDYLOID JOINTA CONDYLOID JOINT
Movements of the wrist joint are flexion, extension, hyperextension, abduction, adduction and circumduction
Inertia is a measure of the resistance of a body to a change in rotary motion.
Inertia = mr2
1414
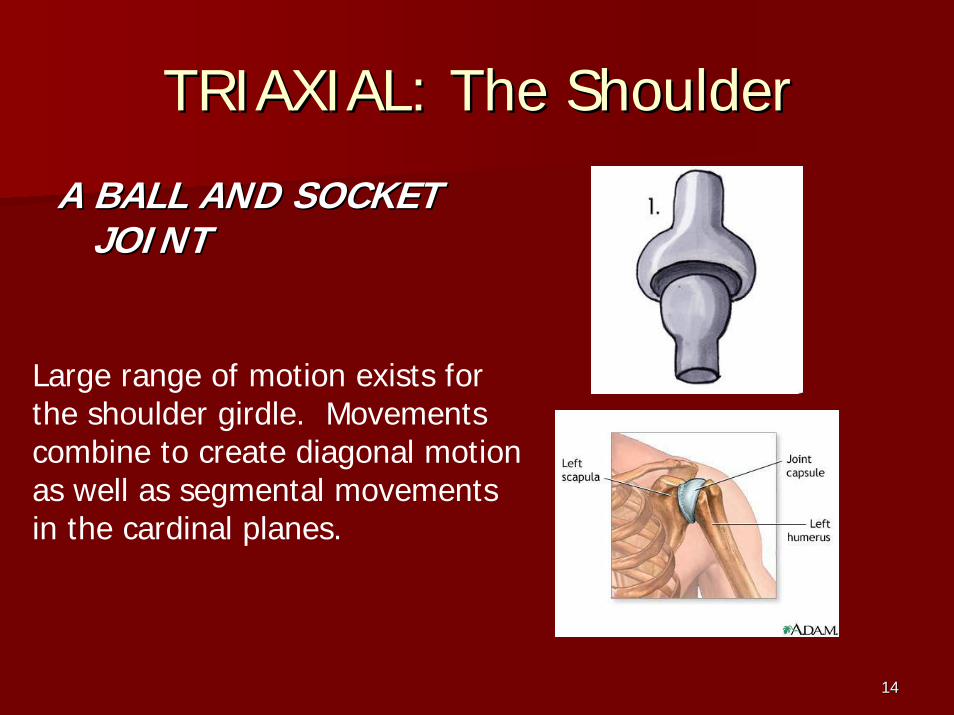
TRIAXIAL: The ShoulderTRIAXIAL: The Shoulder
A BALL AND SOCKET A BALL AND SOCKET JOINTJOINT
Large range of motion exists for the shoulder girdle. Movements combine to create diagonal motion as well as segmental movements in the cardinal planes.
1515
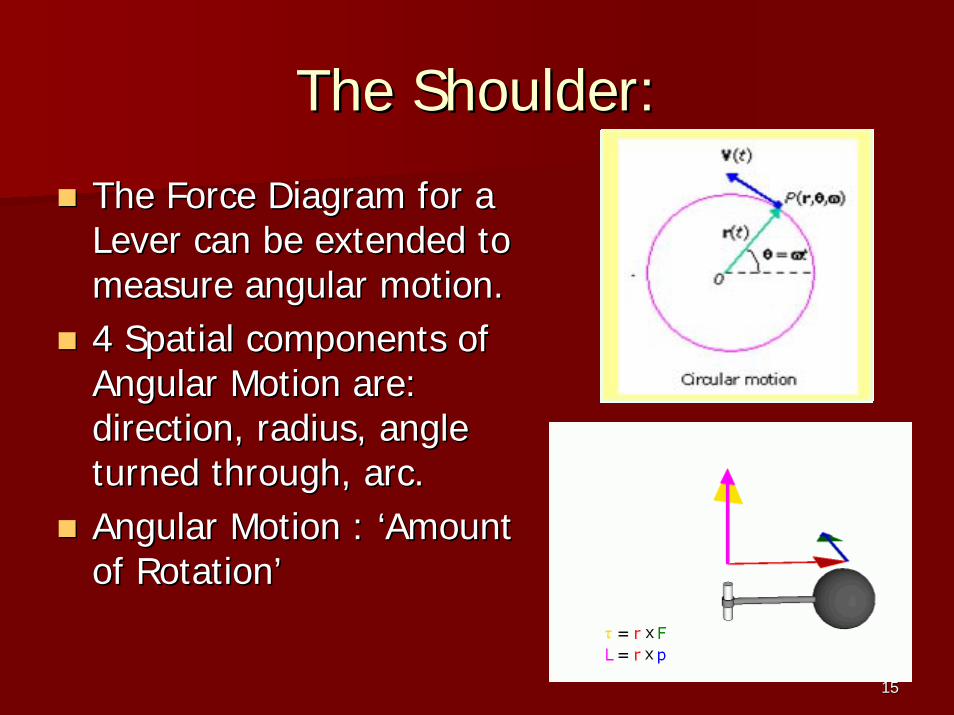
The Shoulder:The Shoulder:
The Force Diagram for a The Force Diagram for a Lever can be extended to Lever can be extended to measure angular motion. measure angular motion. 4 Spatial components of 4 Spatial components of Angular Motion are: Angular Motion are: direction, radius, angle direction, radius, angle turned through, arc.turned through, arc.Angular Motion : ‘Amount Angular Motion : ‘Amount of Rotation’of Rotation’
1616
""We aren't doing a real great job We aren't doing a real great job with upperwith upper--limb prostheses. Our limb prostheses. Our challenge is to restore function challenge is to restore function for people who have suffered for people who have suffered limb loss."limb loss."
Dr. Todd Dr. Todd KuikenKuiken, director of , director of neuroengineeringneuroengineering at the Center at the Center for Artificial Limbs at the for Artificial Limbs at the Rehabilitation Institute of ChicagoRehabilitation Institute of Chicago
1717
““CODMAN’S PARADOX”CODMAN’S PARADOX”
Attempting movements of flexion, Attempting movements of flexion, extension, abduction and adduction extension, abduction and adduction through large ranges of motion is through large ranges of motion is accompanied by rotation of the upper accompanied by rotation of the upper extremity (shoulder in this case) around extremity (shoulder in this case) around its longitudinal axis (z). its longitudinal axis (z).
1818
What we learn from Codman’s What we learn from Codman’s ParadoxParadox
From the realization that none of the From the realization that none of the shoulder movements in the saggital and shoulder movements in the saggital and frontal planes can be classified as only one frontal planes can be classified as only one type of angular motion. It is now the goal type of angular motion. It is now the goal of the Biomedical engineer to create a of the Biomedical engineer to create a prosthesis that duplicates the skeletal prosthesis that duplicates the skeletal framework, and allows rotation of the framework, and allows rotation of the shoulder joint through hypershoulder joint through hyper-- movements movements of the upper and lower arm.of the upper and lower arm.
1919
NervesNerves
Dendrites Dendrites -- cell body cell body --axon axon -- collaterals collaterals --terminal branches terminal branches --terminal buttonsterminal buttonsRefractory period Refractory period after action potential after action potential in which no other in which no other potential can be potential can be generatedgenerated
2020
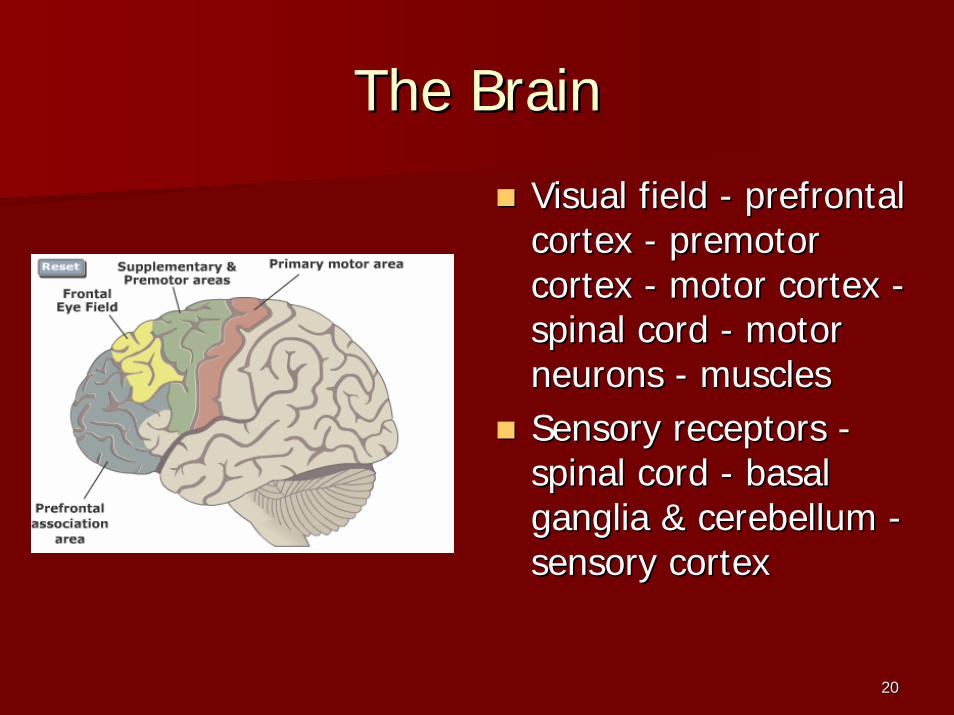
The BrainThe Brain
Visual field Visual field -- prefrontal prefrontal cortex cortex -- premotor premotor cortex cortex -- motor cortex motor cortex --spinal cord spinal cord -- motor motor neurons neurons -- musclesmusclesSensory receptors Sensory receptors --spinal cord spinal cord -- basal basal ganglia & cerebellum ganglia & cerebellum --sensory cortexsensory cortex
2121
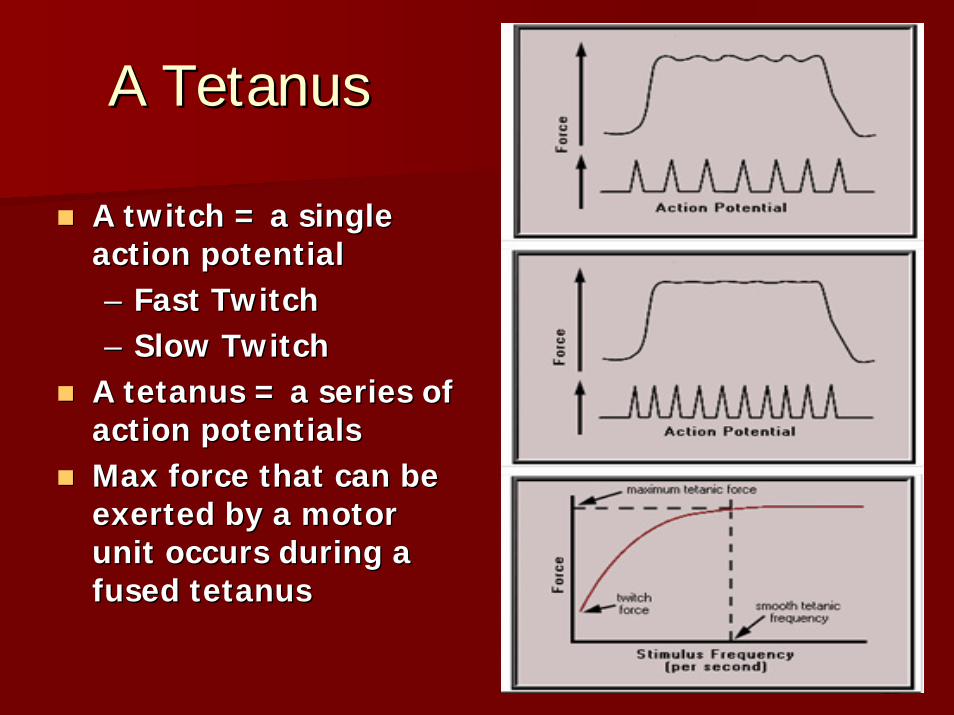
A TetanusA Tetanus
A twitch = a single A twitch = a single action potentialaction potential–– Fast TwitchFast Twitch–– Slow TwitchSlow Twitch
A tetanus = a series of A tetanus = a series of action potentialsaction potentialsMax force that can be Max force that can be exerted by a motor exerted by a motor unit occurs during a unit occurs during a fused tetanusfused tetanus

2222
FatigueFatigue
Resistance to fatigue Resistance to fatigue = the ability of a motor = the ability of a motor unit to withstand the decrease of the maximum unit to withstand the decrease of the maximum force produced when a motor unit is required to force produced when a motor unit is required to produce a series of produce a series of tetanitetani
Fatigue IndexFatigue Index -- used to determine classification used to determine classification of motor unit (Type S, FR or FF)of motor unit (Type S, FR or FF)
2323
Tying it all togetherTying it all together
Muscle force is also increased by Muscle force is also increased by increasing the number of motor units increasing the number of motor units involvedinvolvedNeed to understand how and why the Need to understand how and why the signal can increase from the brainsignal can increase from the brainNow focus in on the brachial plexus nerve Now focus in on the brachial plexus nerve (exits C5(exits C5--C8 & T1) which innervates the C8 & T1) which innervates the arm and upper backarm and upper back
2424
The Human ArmThe Human ArmThe arm can be broken into The arm can be broken into OsteofascialOsteofascial compartmentscompartmentsThe arm is divided by a The arm is divided by a fascialfascial layer that separates the layer that separates the muscles into an anterior and posterior compartments. muscles into an anterior and posterior compartments. The compartments contain muscles which are The compartments contain muscles which are innervated by the same nerve and perform the same innervated by the same nerve and perform the same action.action.RADIAL NERVE: Posterior CompartmentRADIAL NERVE: Posterior CompartmentMUSCULOCUTANEOUS NERVE: Anterior MUSCULOCUTANEOUS NERVE: Anterior CompartmentCompartmentMEDIAN NERVE:MEDIAN NERVE:ULNAR NERVE:ULNAR NERVE:
2525
RADIAL NERVE:RADIAL NERVE:Posterior CompartmentPosterior Compartment
•• Also known as the “Extensor Compartment”.Also known as the “Extensor Compartment”.•• The muscles in this compartment are the triceps The muscles in this compartment are the triceps
brachiibrachii, and , and anconeusanconeus muscle.muscle.
•• The Radial nerve also controls the Extensor The Radial nerve also controls the Extensor CarpiCarpiRadialisRadialis..The deep branch of the Radial nerve controls the The deep branch of the Radial nerve controls the extensor extensor carpicarpi radialisradialis brevisbrevis, and the , and the supinatorsupinator. . The posterior The posterior interosseousinterosseous nerve controls the extensors nerve controls the extensors of the hand.of the hand.

2626
MUSCULOCUTANEOUS NERVE:MUSCULOCUTANEOUS NERVE:Anterior CompartmentAnterior Compartment
•• Supplies the muscles in the anterior Supplies the muscles in the anterior compartment, also known as the “Flexor compartment, also known as the “Flexor Compartment”. The muscles in this compartment Compartment”. The muscles in this compartment are the biceps are the biceps brachiibrachii, , brachialisbrachialis, and the , and the coracobrachialiscoracobrachialis..
•• The large Deltoid muscle is believed to have part of The large Deltoid muscle is believed to have part of its body in the anterior compartment, the deltoid is the its body in the anterior compartment, the deltoid is the main adductor muscle. The protagonist of the deltoid main adductor muscle. The protagonist of the deltoid muscle is the muscle is the pectoralispectoralis muslcesmuslces found in the chest.found in the chest.

2727
MEDIAN NERVE:MEDIAN NERVE:
The Median Nerve controls the The Median Nerve controls the PronatorPronator TeresTeres, , palmarispalmaris longuslongus, flexor carpal , flexor carpal radialisradialis..The The UlnarUlnar Nerve controls flexor carpal Nerve controls flexor carpal ulnarisulnaris, , flexor flexor digitorumdigitorum profundusprofundus in the forearm and in the forearm and continues to the hand to control various continues to the hand to control various functions of the fingers.functions of the fingers.

2828
Limb Prostheses are used as a substitute for Limb Prostheses are used as a substitute for a missing limb. Currently amputees will a missing limb. Currently amputees will decide, based on their level of amputation, decide, based on their level of amputation, which type of prosthetic device: mechanical which type of prosthetic device: mechanical or electrical, will best suit the demands of or electrical, will best suit the demands of their lifestyle.their lifestyle.
PROSTHESIS PAST
2929
Mechanical Mechanical vsvs ElectricalElectrical
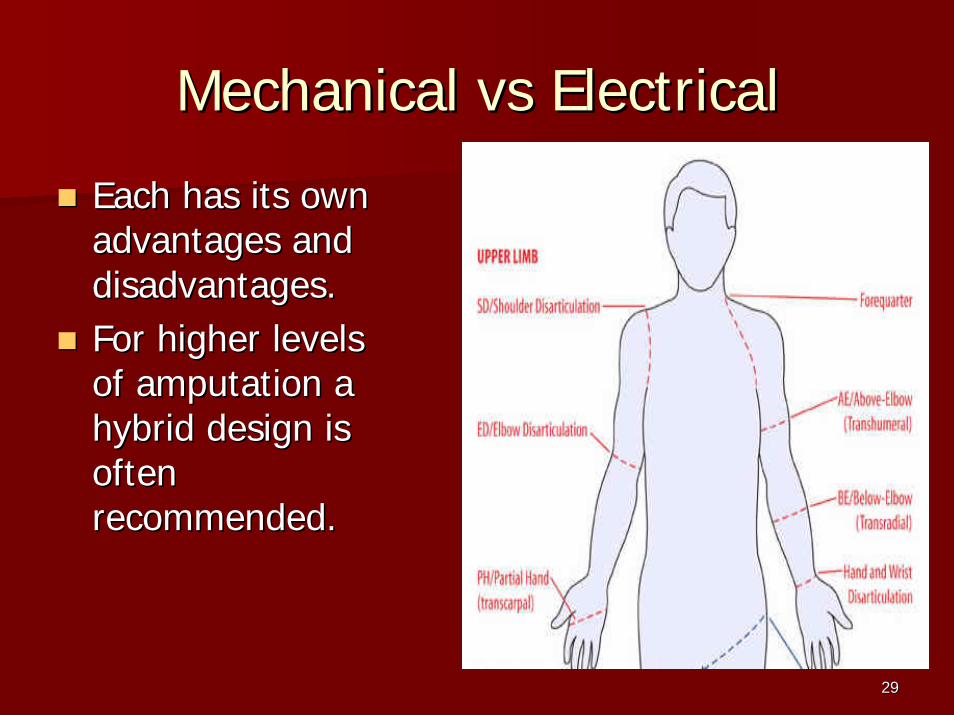
Each has its own Each has its own advantages and advantages and disadvantages. disadvantages. For higher levels For higher levels of amputation a of amputation a hybrid design is hybrid design is often often recommended.recommended.
3030
Mechanical Mechanical vsvs Electrical:Electrical:
Terminal devices play a large role in Terminal devices play a large role in whether an amputee decides to choose a whether an amputee decides to choose a mechanical or electrical prosthesis.mechanical or electrical prosthesis.Terminal devices add functionality to the Terminal devices add functionality to the prosthesis. IE: myoelectric hand, prosthesis. IE: myoelectric hand, mechanical cablemechanical cable--operated elbow, switch operated elbow, switch controlled electric wrist and a passive controlled electric wrist and a passive mechanical friction humeral rotation unit.mechanical friction humeral rotation unit.

3131
Mechanical:Mechanical:
ADVANTAGES:ADVANTAGES:–– Limb can be used in a Limb can be used in a
variety of physical variety of physical environments without environments without enduring damage.enduring damage.
–– High level of speed and High level of speed and accuracy accuracy
DISADVANTAGES:DISADVANTAGES:–– Friction beneath holding Friction beneath holding
harness can cause harness can cause discomfort.discomfort.
–– NonNon--aestheticaesthetic

3232
LTI Locking Shoulder JointLTI Locking Shoulder Joint
More Strength/Greater Resistance More Strength/Greater Resistance to wearto wearBiomaterial: high strength Biomaterial: high strength aerospace alloys.aerospace alloys.172 grams172 gramsNatural gait, ability to lock every Natural gait, ability to lock every 10 degrees through a range of 10 degrees through a range of motion of 360 degrees.motion of 360 degrees.Second hinge allows for Second hinge allows for AbAb/Adduction/AdductionJoint frees manually, or by nudge Joint frees manually, or by nudge control (use your imagination!)control (use your imagination!)Available for use in both skeletal Available for use in both skeletal prosthetic systems.prosthetic systems.
3333
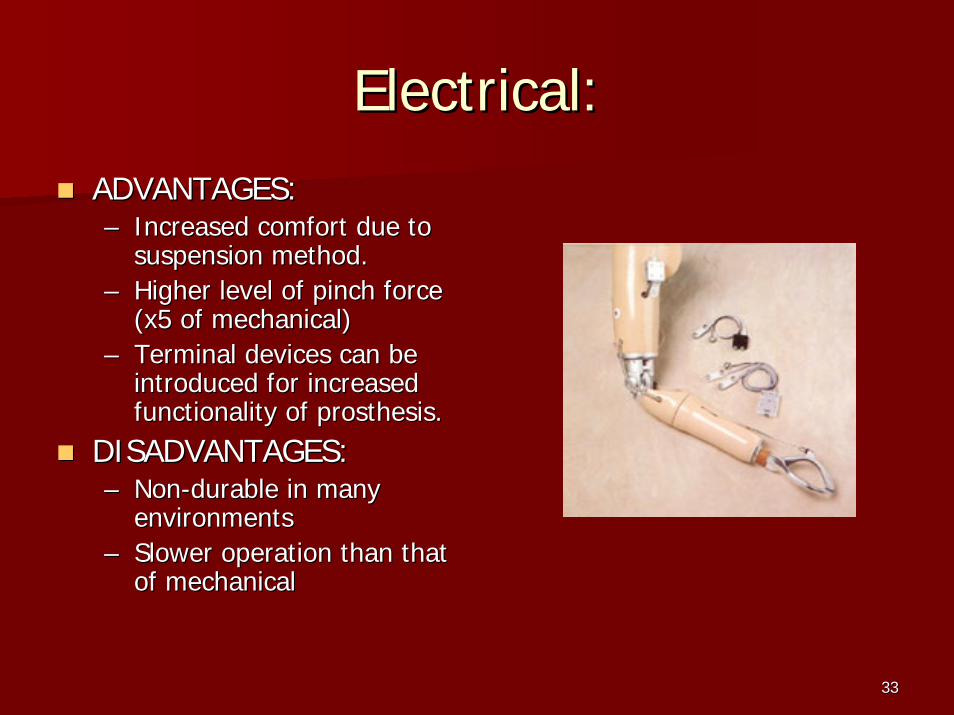
Electrical:Electrical:ADVANTAGES:ADVANTAGES:–– Increased comfort due to Increased comfort due to
suspension method.suspension method.–– Higher level of pinch force Higher level of pinch force
(x5 of mechanical)(x5 of mechanical)–– Terminal devices can be Terminal devices can be
introduced for increased introduced for increased functionality of prosthesis.functionality of prosthesis.
DISADVANTAGES:DISADVANTAGES:–– NonNon--durable in many durable in many
environmentsenvironments–– Slower operation than that Slower operation than that
of mechanicalof mechanical

3434
The Electric ElbowThe Electric Elbow
Close hook using Close hook using humeral flexion and humeral flexion and bibi--scapular abduction.scapular abduction.Low Level Amputee Low Level Amputee
Can be used with…Can be used with…

3535
Boston Digital ArmBoston Digital Arm
Prosthetic system incorporating microprocessor Prosthetic system incorporating microprocessor technologytechnologyMost torque of any prosthetic on the market.Most torque of any prosthetic on the market.Controls up to four additional prosthetic devices (hands, Controls up to four additional prosthetic devices (hands, grippers, wrist rotators, shoulder lock actuators etc) grippers, wrist rotators, shoulder lock actuators etc) sequentially through cosequentially through co--contraction switching.contraction switching.On board microprocessor allows for suitable and unique On board microprocessor allows for suitable and unique control to be found at patients most optimal muscle site.control to be found at patients most optimal muscle site.Boston arm delivers more than 10ftBoston arm delivers more than 10ft--lbs of torque lbs of torque –– 2 2 pound hand device = 8 lbs active lift.pound hand device = 8 lbs active lift.Can lift 50 lbs while device is locked.Can lift 50 lbs while device is locked.Low level amputeeLow level amputee
3636
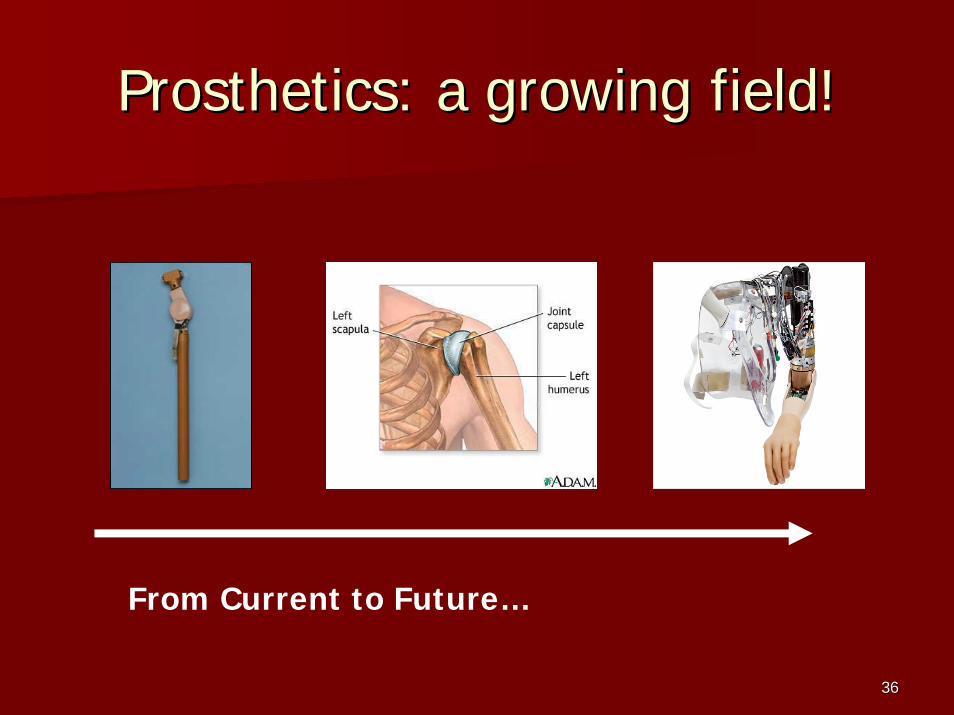
Prosthetics: a growing field!Prosthetics: a growing field!
From Current to Future…
3737
The Bionic ArmThe Bionic Arm
By the Rehabilitation By the Rehabilitation Institute of Chicago Institute of Chicago NECAL department NECAL department --Dr. Todd Dr. Todd KuikenKuikenSuccessfully Successfully attached to four attached to four peoplepeopleJesse Sullivan and Jesse Sullivan and Claudia Mitchell are Claudia Mitchell are our main focusour main focus
3838
Jesse SullivanJesse Sullivan
Required bilateral Required bilateral shoulder shoulder disarticulation disarticulation amputationsamputationsInitially fitted with Initially fitted with bodybody--powered right powered right arm, externally arm, externally powered left armpowered left armSkin grafts became Skin grafts became hyperhyper--estheticesthetic
3939
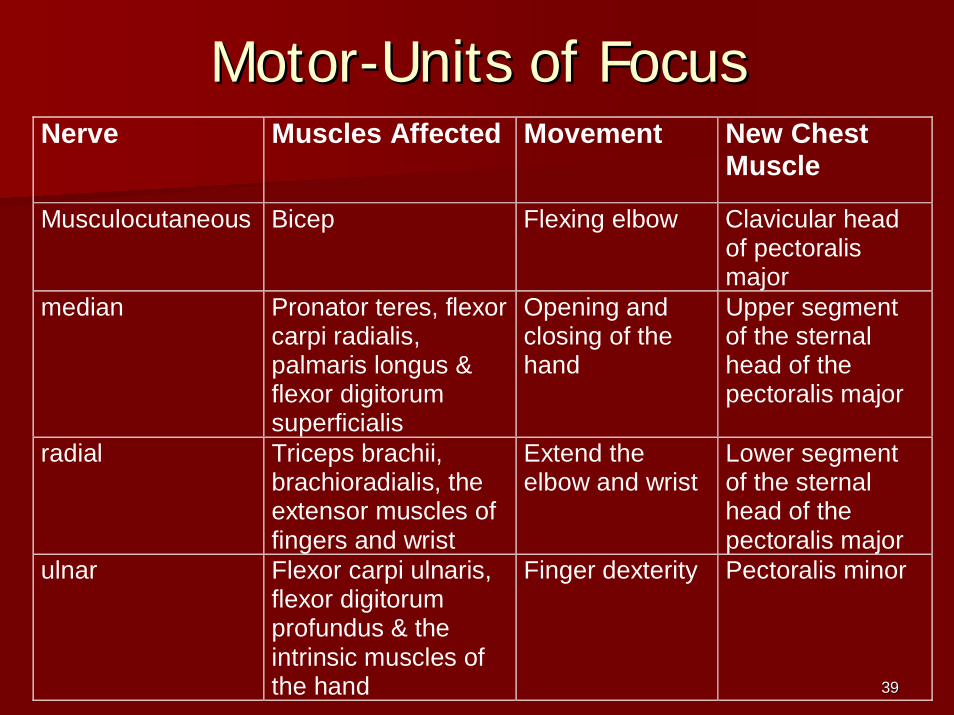
MotorMotor--Units of FocusUnits of FocusNerve Muscles Affected Movement New Chest
Muscle
Musculocutaneous Bicep Flexing elbow Clavicular headof pectoralismajor
median Pronator teres, flexorcarpi radialis,palmaris longus &flexor digitorumsuperficialis
Opening andclosing of thehand
Upper segmentof the sternalhead of thepectoralis major
radial Triceps brachii,brachioradialis, theextensor muscles offingers and wrist
Extend theelbow and wrist
Lower segmentof the sternalhead of thepectoralis major
ulnar Flexor carpi ulnaris,flexor digitorumprofundus & theintrinsic muscles ofthe hand
Finger dexterity Pectoralis minor

4040
The Innervation ResultsThe Innervation Results
Strong contraction of Strong contraction of musculocutaneousmusculocutaneous motormotor--unitunit2 moderate contractions of median motor2 moderate contractions of median motor--unitunitweak contraction of radial motor unitweak contraction of radial motor unitno contraction of no contraction of ulnarulnar motormotor--unitunit
4141
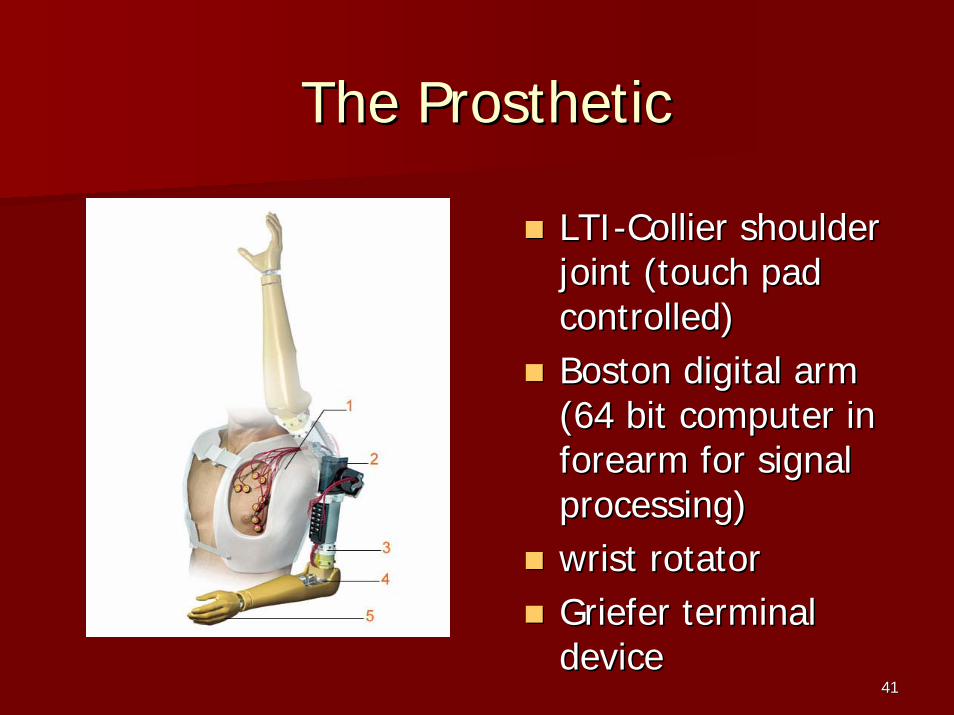
The ProstheticThe Prosthetic
LTILTI--Collier shoulder Collier shoulder joint (touch pad joint (touch pad controlled)controlled)Boston digital arm Boston digital arm (64 bit computer in (64 bit computer in forearm for signal forearm for signal processing)processing)wrist rotatorwrist rotatorGriefer terminal Griefer terminal devicedevice
4242
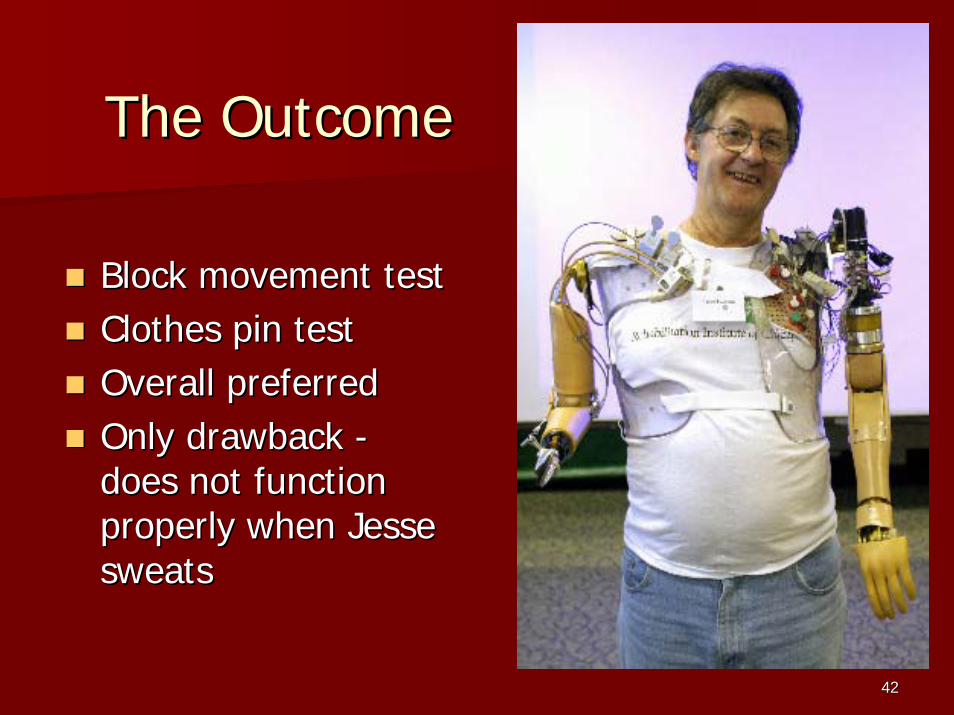
The OutcomeThe Outcome
Block movement testBlock movement testClothes pin testClothes pin testOverall preferredOverall preferredOnly drawback Only drawback --does not function does not function properly when Jesse properly when Jesse sweatssweats
4343
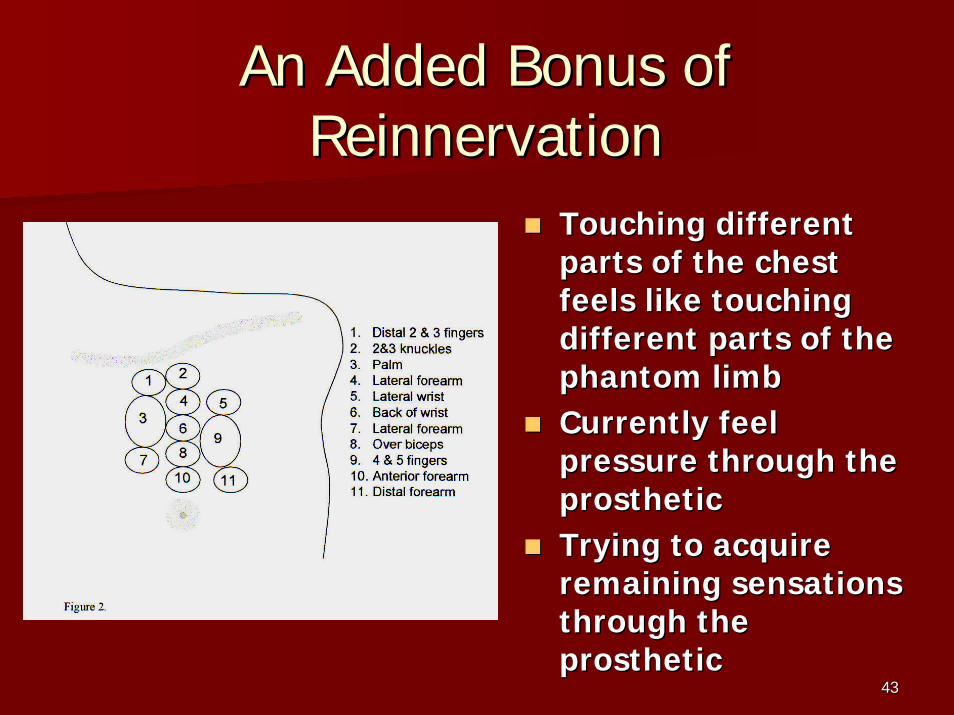
An Added Bonus of An Added Bonus of ReinnervationReinnervation
Touching different Touching different parts of the chest parts of the chest feels like touching feels like touching different parts of the different parts of the phantom limbphantom limbCurrently feel Currently feel pressure through the pressure through the prostheticprostheticTrying to acquire Trying to acquire remaining sensations remaining sensations through the through the prostheticprosthetic
4444
Claudia MitchellClaudia Mitchell
World’s first bionic World’s first bionic womanwomanMore issues with More issues with adipose cells creating adipose cells creating crosscross--talk in women talk in women than in menthan in menImplemented Implemented shielding and shielding and insulation on top of insulation on top of removal of fat cellsremoval of fat cells
4545
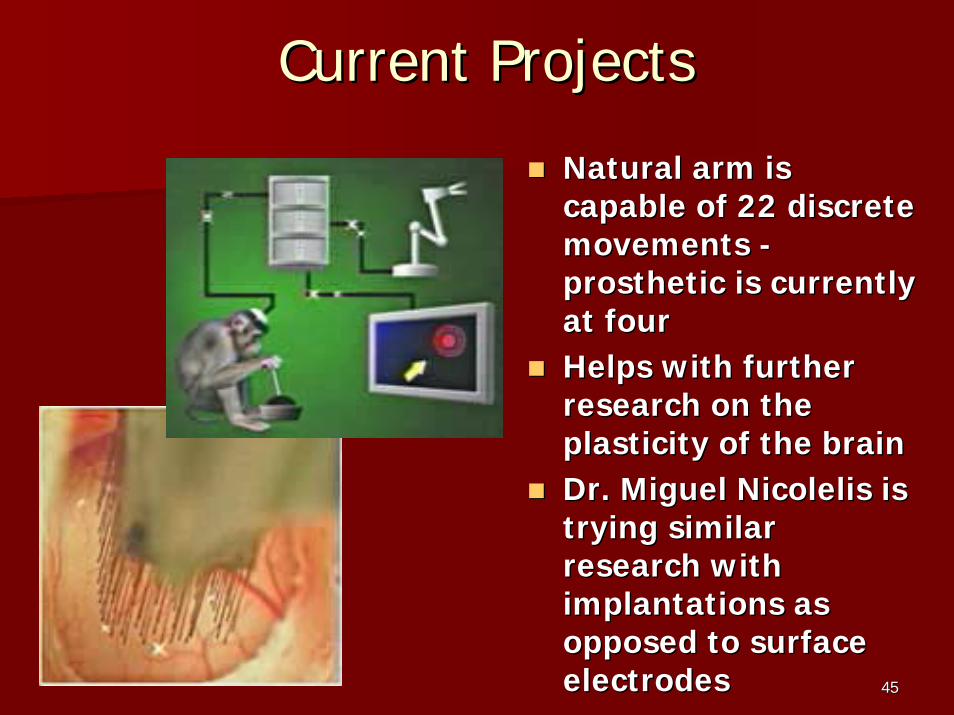
Current ProjectsCurrent Projects
Natural arm is Natural arm is capable of 22 discrete capable of 22 discrete movements movements --prosthetic is currently prosthetic is currently at fourat fourHelps with further Helps with further research on the research on the plasticity of the brainplasticity of the brainDr. Miguel Nicolelis is Dr. Miguel Nicolelis is trying similar trying similar research with research with implantations as implantations as opposed to surface opposed to surface electrodeselectrodes
4646
PROSTHESIS FUTUREPROSTHESIS FUTURE
4747
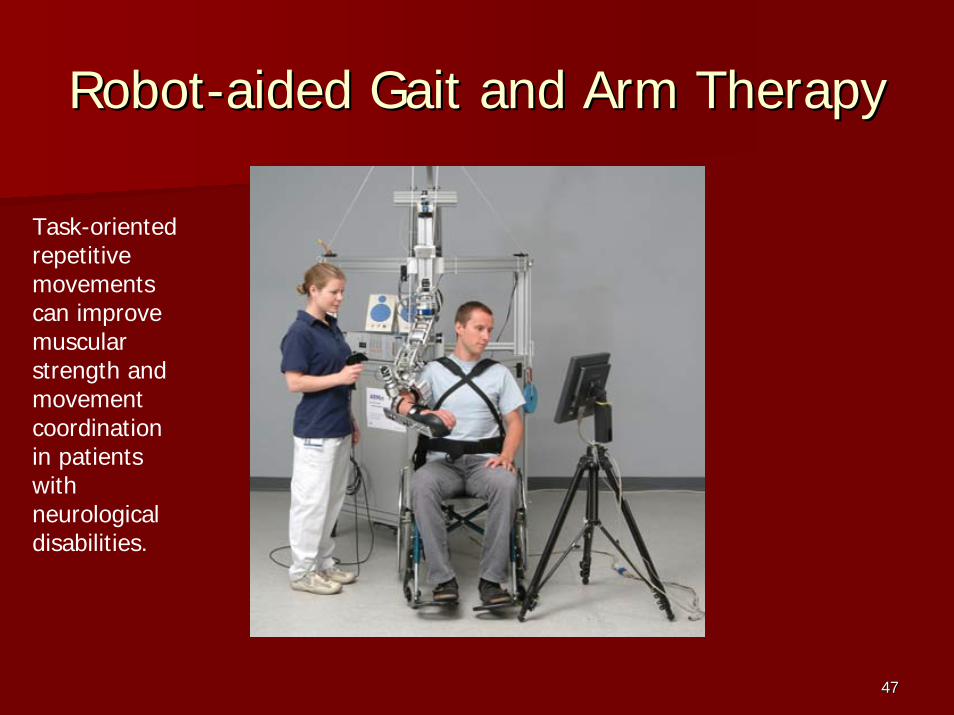
RobotRobot--aided Gait and Arm Therapy aided Gait and Arm Therapy
Task-oriented repetitive movements can improve muscular strength and movement coordination in patients with neurological disabilities.
4848
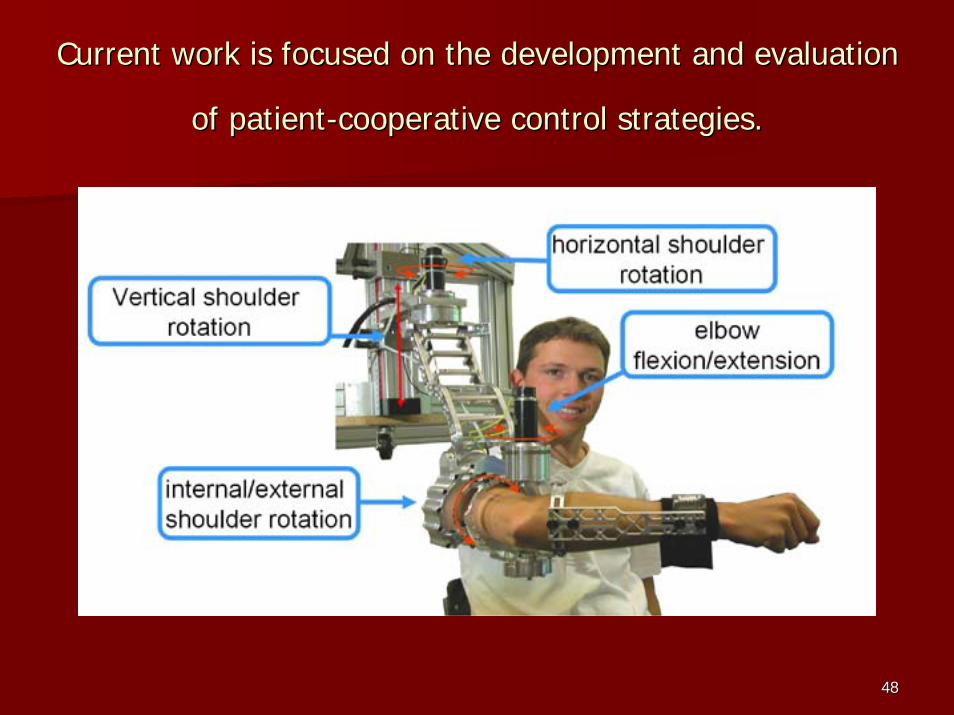
Current work is focused on the development and evaluation Current work is focused on the development and evaluation
of patientof patient--cooperative control strategies.cooperative control strategies.

4949
ConclusionConclusion
Reality of the Exoskeletal robot meeting Reality of the Exoskeletal robot meeting the Bionic arm (not in battle) creating a the Bionic arm (not in battle) creating a hybrid of the two is not too far off. The hybrid of the two is not too far off. The United States Army has their hand in both United States Army has their hand in both operations, and the fusing of both projects operations, and the fusing of both projects is a possibility in the near future.is a possibility in the near future.
Related Documents











