1 1-Introdução 1.1 – Motivação Existe uma cada vez maior procura de Mini-UAV (veículos aéreos não tripulados de pequenas dimensões) devido às suas grandes potencialidades e vantagens. Como são simples e não requerem o emprego de tecnologia avançada, constituem uma solução viável para países que não possuem financiamento para desenvolver, fabricar ou construir equipamento aeronáutico convencional. Por outro lado, existe o potencial de uso em aplicações civis, o que cria o interesse pelo desenvolvimento de UAV’s simples e pequenos para uma grande variedade de fins. 1.2– Evolução O conceito de veículo aéreo não tripulado (UAV) não é propriamente inovador. As primeiras ideias remontam o ano 1916, mas não passaram só de ideias porque a tecnologia disponível não o permitia. Durante a 1ª Guerra Mundial, apareceram as primeiras aeronaves de controlo remoto (basicamente eram torpedos aéreos capazes de transportar explosivos) e o mesmo se sucedeu na 2ª Guerra Mundial com os mísseis V1. Só em 1980 e 1990 é que as aeronaves não tripuladas começaram a desempenhar funções mais importantes devido à capacidade da tecnologia electrónica permitir a realização de missões sem controlo humano. Usualmente os UAV’s são destinados para missões de reconhecimento e vigilância, deixando as missões de combate e bombardeamento para os recentes UCAV’s (Unmanned combat aerial vehicles – veículos de combate aéreo não tripulados).

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
1-Introdução
1.1 – Motivação
Existe uma cada vez maior procura de Mini-UAV (veículos aéreos não tripulados de pequenas
dimensões) devido às suas grandes potencialidades e vantagens. Como são simples e não
requerem o emprego de tecnologia avançada, constituem uma solução viável para países que não
possuem financiamento para desenvolver, fabricar ou construir equipamento aeronáutico
convencional.
Por outro lado, existe o potencial de uso em aplicações civis, o que cria o interesse pelo
desenvolvimento de UAV’s simples e pequenos para uma grande variedade de fins.
1.2– Evolução
O conceito de veículo aéreo não tripulado (UAV) não é propriamente inovador. As primeiras
ideias remontam o ano 1916, mas não passaram só de ideias porque a tecnologia disponível não o
permitia.
Durante a 1ª Guerra Mundial, apareceram as primeiras aeronaves de controlo remoto
(basicamente eram torpedos aéreos capazes de transportar explosivos) e o mesmo se sucedeu na
2ª Guerra Mundial com os mísseis V1.
Só em 1980 e 1990 é que as aeronaves não tripuladas começaram a desempenhar funções mais
importantes devido à capacidade da tecnologia electrónica permitir a realização de missões sem
controlo humano.
Usualmente os UAV’s são destinados para missões de reconhecimento e vigilância, deixando as
missões de combate e bombardeamento para os recentes UCAV’s (Unmanned combat aerial
vehicles – veículos de combate aéreo não tripulados).

2
1.3 – Mercado
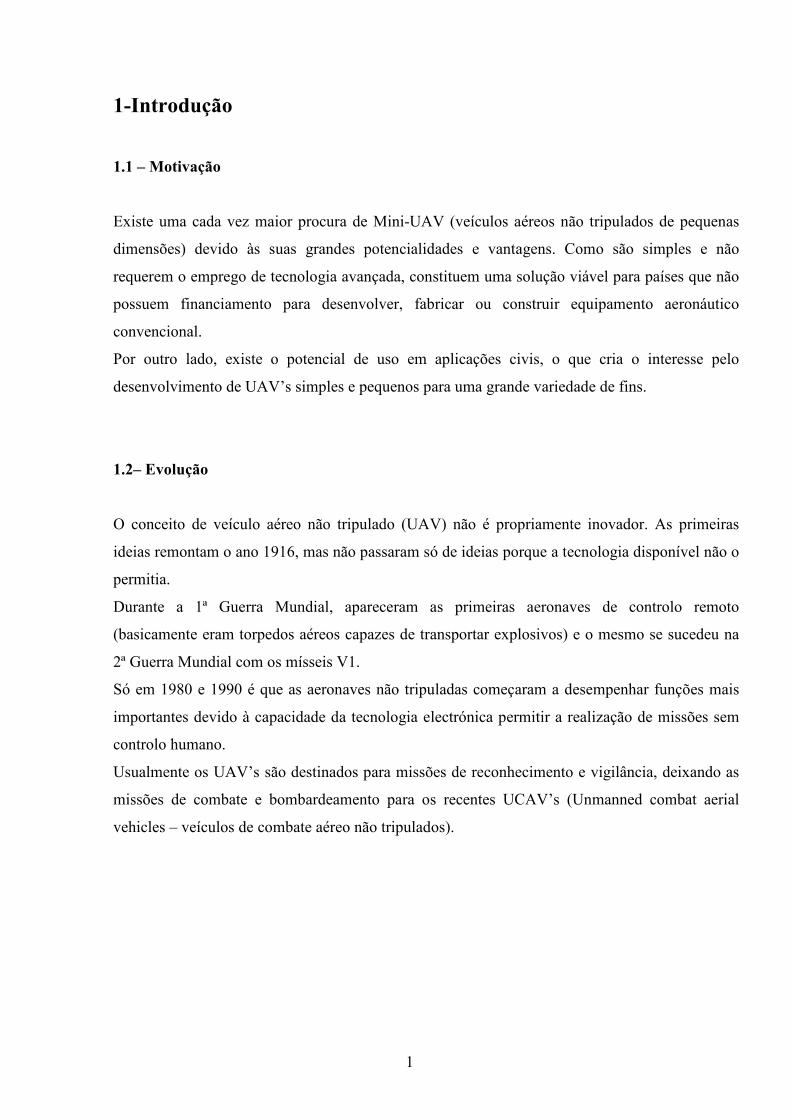
Recentemente, os UAV têm vindo a experimentar um grande crescimento na indústria
aeronáutica. Actualmente, já detém uma boa parcela da indústria aeronáutica e estudos realizados
em 2006 revelam que este crescimento irá continuar, prevendo-se gastos anuais na ordem dos 8
biliões de dólares americanos no final de 2017 [1].
Fig.1.1 – Gastos anuais no sector dos UAV [2]
1.4 – Objectivos da dissertação
O trabalho apresentado nesta dissertação consiste na concepção de uma célula miniatura de um
veículo aéreo não tripulado (Mini-UAV), que poderá ser destinada a dar apoio a operações
tácticas, que possa transmitir informação em tempo real ou em tempo quase real. A aeronave
deve ser de construção fácil a partir de materiais e componentes disponíveis comercialmente. Este
desenvolvimento vai centrar-se em métodos de concepção usados para desenvolver aeronaves
convencionais de passageiros.
O método de concepção será apresentado com descrição dos aspectos fundamentais e um
exemplo será depois apresentado. Neste exemplo, a aeronave a conceber deverá poder realizar
missões de reconhecimento, tanto em cenário civil (ao serviço da polícia ou guarda costeira)
como em cenário militar (ao serviço do exército ou da marinha), operada por uma equipa de dois
elementos. Para além destes dois aspectos, a aeronave deverá ter dimensões e

3
peso reduzidos para facilitar a operação de lançamento à mão ou com ajuda de um cabo “bungee”
em terreno aberto ou, lançamento e recepção no convés caso a sua utilização seja em navios rápidos
de patrulha (FPB).[3]
À semelhança dos modelos da mesma categoria com a mesma finalidade, as missões deverão ser
executadas a uma altitude de 150 a 300 m (500 a 1000 pés). A grande diferença é que terá de servir
missões com um raio de acção de 50 km.
Como objectivo final, o modelo a desenvolver terá de se apresentar com um custo relativamente
inferior aos modelos existentes (cerca de 28.500 dólares americanos por unidade [4]), e como tal,
materiais menos exóticos como fibras de vidro ou polipropileno (EPP) terão de ser considerados.

4
1.5 – Vantagens dos Mini-UAV
Relativamente às aeronaves convencionais:
� Baixo custo unitário;
� Baixo custo de manutenção;
� Não necessita de tripulação (sem custo de formação da tripulação);
� Pode voar de dia e de noite, totalmente sob controlo de um computador;
� Fácil transporte (transportável por equipas pequenas – 2 ou 3 pessoas);
� Económico a nível de consumos e menos poluente;
� Não requer pistas para descolagem e aterragem;
� Difícil detecção – fácil infiltração (menor assinatura no radar e menor assinatura sonora);
� Danos e consequências menores em caso de acidente (seguro inferior):
� Menores danos materiais devido à menor energia cinética;
� Nenhum ferimento ou morte do piloto no acidente;
� Menores hipóteses de lesão ou morte de civis num acidente aéreo;

5
A figura 1.2 mostra a comparação entre duas soluções (um Mini-UAV e uma aeronave
convencional) para executar missões de reconhecimento.
Fig.1.2 Comparação entre um UAV e uma aeronave convencional [5]

6
1.6 – Regulamentação
A maior preocupação da FAA (Federal Aviation Administration) sobre as operações dos UAV é a
segurança em espaço aéreo civil. É essencial que estes veículos não cheguem muito próximo de
aeronaves que transportem pessoas ou que comprometam a segurança de pessoas em a terra.
Quando uma equipa militar ou uma agência do governo pretende operar um UAV em espaço
aéreo civil, a FAA avalia o pedido e envia um COA (Certificate Of Authorization), baseando-se
nos seguintes princípios:
� O COA autoriza o operador a usar um espaço aéreo definido e inclui provisões únicas
para cada operação.
� A maioria, se não todos, dos COAs requerem uma adequada coordenação com o controlo
de tráfego aéreo e exigem que o UAV tenha um “transponder” capaz de operar no modo
de controlo de tráfego aéreo padrão com relatório automático da altitude.
� Para certificar que o UAV não venha a interferir com outra aeronave, é recomendado um
observador em terra ou uma aeronave que mantenha o contacto visual com o UAV.[6]
Também existem outras regulamentações mais detalhadas relativas aos UAV, mas essas apenas
dizem respeito às classes MALE (Medium Altitude Long Endurance) e HALE (High Altitude
Long Endurance).
Estas referências dizem respeito à regulamentação que é aplicada em território norte-americano.
Na Europa e no resto do mundo, a regulamentação estabelecida pelo ICAO (International Civil
Aviation Organization [7]) para os UAV parece ser idêntica ao da FAA.

7
2 – Fundamentação técnica
Embora exista uma grande variedade de modelos e classes de UAV’s, os seus processos e
métodos de concepção ainda não se identificam como uma ciência certificada, ou pelo menos,
ainda não normalizada.
Alguns estudos realizados sobre este tipo de aeronaves levaram à criação de simples métodos
para conceber este tipo de aeronaves. Por um conceito novo e ainda estar em desenvolvimento,
não podemos depender destes estudos porque podemos correr o risco de não obter resultados
satisfatórios.
Como solução, o desenvolvimento vai-se centrar em métodos certificados para a concepção de
aeronaves convencionais, procedendo a ajustes e correcções necessárias para que este método se
adapte à concepção de Mini-UAV’s.
Os métodos e expressões presentes foram baseados na referência bibliográfica “Aircraft Design:
A concetual approach” do autor Daniel Raymer [8]. Devido ao número elevado de equações, será
frequente encontrar vários termos com a mesma letra. Para evitar tal confusão, é aconselhável ter
atenção às descrições das expressões.

8
Processo de concepção
O processo típico de concepção de aeronaves convencionais baseia-se em métodos comparativos
e estatísticos desenvolvidos a partir de uma grande variedade de estudos, testes e de dados
provenientes de aeronaves de sucesso ao longo da história. O resultado resume-se num processo
iterativo com passos definidos que visam produzir dados suficientes para se obter uma solução
óptima. Este processo é ilustrado na figura 2.1 e todos os passos importantes são seguidamente
descritos.
Fig.2.1 – Processo de concepção

9
2.1 – Requisitos
O processo de concepção tem início quando é apresentado o problema, ou seja, o conjunto de
requisitos que precisam de ser satisfeitos. Normalmente são especificados pelo cliente ou pela
entidade que pretenda adquirir uma solução com todas características pretendias, ou então pela
própria organização que está a desenvolver o projecto, com finalidade de conquistar uma quota
do mercado.
De uma maneira ou de outra, são os requisitos que afectam como a solução deve ser desenvolvida
e deve-se cumprir o máximo de requisitos possíveis, senão todos.
2.2 – Perfil da missão
Com base nos requisitos impostos inicialmente, esboça-se o perfil típico da missão contendo
informação sobre as condições em que a aeronave terá de operar. O perfil da missão normalmente
apresenta-se com as etapas de descolagem, subida, voo cruzeiro, descida e aterragem, como
demonstra a figura 2.2.
Fig.2.2 – Exemplo de perfil da missão
Outras etapas podem ser adicionadas em função dos requisitos pedidos como espera, aceleração e
combate.

10
2.3 – Tecnologia disponível, conceitos e decisões iniciais
Nesta fase, é feita uma pesquisa sobre a tecnologia disponível e de soluções idênticas no
mercado. É aqui onde se começa a delinear o formato da solução a desenvolver, estabelecendo
decisões iniciais como o tipo de configuração a adoptar, o número de motores necessários, o tipo
de trem de aterragem ou o tipo de aerofólio que melhor se adequa a solução.
No que diz respeito à configuração, pode ser determinada pela posição dos motores (“tractor” ou
“pusher”) e pela posição das asas (convencional, “canard” e delta).
Uma aeronave na configuração “tractor” possui os motores direccionados para a frente, puxando
a aeronave ao passo que uma aeronave na configuração “pusher” possui os motores direccionados
para trás, empurrando a aeronave.
Fig.2.3 – Exemplo de configurações “tractor” e “pusher”
A configuração “pusher” apresenta vantagens na medida em que o fluxo induzido pela hélice não
é afectado pela presença de qualquer componente como acontece na configuração “tractor”.
Apesar disto, a configuração “tractor” é vantajosa nas condições de aterragens e descolagens,
visto que a hélice encontra-se livre de contacto com o solo.
No que diz respeito à posição das asas, a configuração convencional (asa perto do centro de
gravidade e os planos verticais e horizontais da empenagem na traseira da aeronave) é a mais
simples e adoptada pela maioria das aeronaves existentes. Outra configuração é a “canard”, em
que a asa principal é posicionada atrás do centro de gravidade e o plano horizontal da empenagem
é colocada no nariz da aeronave. Esta configuração apresenta vantagens de estabilidade, pois é
praticamente impossível de perder o controlo em condições de perda de sustentação. É uma
configuração que começa a ser familiar nos aviões recentes e geralmente está associada à
configuração “pusher”.

11
A selecção do tipo de aerofólio também faz parte de uma decisão inicial importante porque o
formato da asa é importante para o tipo de missão que a aeronave vai executar. Aerofólios de
baixo arrasto e alta sustentação devem ser a escolha certa para condições de voo a baixa
velocidade.
Após as decisões iniciais, realiza-se um esboço simples da aeronave a desenvolver para se ter
uma noção global do seu aspecto.

12
2.4 – Estimativa do peso máximo à descolagem
A determinação do peso máximo à descolagem é um passo importante no processo de concepção,
pois os passos seguintes dependem dos resultados calculados nesta fase, e expresso pela seguinte
expressão (2.1):
(2.1)
onde:
Wcrew – peso da tripulação e passageiros;
Wpayload – peso da carga a transportar;
Wf – peso de combustível;
We – peso da aeronave vazia;
Wo – peso máximo à descolagem;
Como se trata de UAV’s, a expressão é simplificada e dá origem a expressão (2.2)
(2.2)
A relação We/Wo pode ser determinada pela expressão (2.3):
54321 max)/()/(/ CCCCC VSWoWohpAbWoaWoWe += (2.3)
onde:
hp/Wo – relação potência/peso;
S – área da asa )( 2ft ;
Wo/S – carga alar )/( 2ftlb ;
A – alongamento;
Vmax – velocidade máxima )(mph ;
a, b, C1, C2, C3, C4, C5 – constantes pré-estabelecidas do anexo I [8];
Admitindo um valor para A (pode ser estabelecido através de tabelas estatísticas para cada tipo de
aeronave – tipicamente menores que 4 para aeronaves velozes e superiores a 6 para
)/()/(1 WoWeWoWf
WpayloadWo
−−=
)/()/(1 WoWeWoWf
WpayloadWcrewWo
−−+
=

13
aeronaves mais lentas) e um valor para a relação hp/Wo (aeronaves como Mini-UAV’s devem
apresentar valores elevados pois vão executar descolagens via lançamento manual), ficam a faltar
os valores de Vmax e Wo/S.
Geralmente, o valor de Vmax é 30% superior ao valor da velocidade de cruzeiro e Wo/S pode ser
calculado de diferentes métodos e no final escolhe-se o menor deles todos. Normalmente esse
valor corresponde à condição de velocidade de “Stall” (velocidade mínima de voo controlado),
que é dada pela expressão (2.4).
max2
2
1/ LStallCVSW ρ= (2.4)
onde:
ρ – densidade do ar )/( 3ftsl ;
Vstall – velocidade mínima de voo controlado )/( sft ;
maxLC - coeficiente de sustentação máximo da asa (tipicamente 0.9 maxlC do aerofólio);
Com estes valores calculados, fica a restar a fracção Wf/Wo que é determinada pelas fracções de
peso correspondentes a cada segmento da missão. Estas fracções podem ser calculadas da
seguinte maneira:
Aquecimento e descolagem
0.99~0.97 Wi/Wo =
Subida
M0325.00065.1/WW 1-ii −= (2.5)
onde:
M – número de Mach;

14
Voo Cruzeiro
−=− )/(550
exp/ 1DL
RCWW
p
bhp
ii η (2.6)
onde:
R – raio de acção do segmento de voo cruzeiro )( ft ;
bhpC – consumo específico )/( sl ;
pη - eficiência do motor;
A relação L/D é a relação sustentação/arrasto e é dada pela expressão (2.7).
Aeq
SW
SW
qCDL
D
π/
/
1/
0 += (2.7)
onde:
q – pressão dinâmica ( 25.0 Vq ρ= ) )/( 2ftlb ;
0DC - valor de arrasto parasita;
e – factor de eficiência Oswald;
Espera
−=− )/(550
exp/ 1DL
EVCWW
p
bhp
ii η (2.8)
onde:
E – tempo de espera )(s ;
V – velocidade de espera )/( sft ;
bhpC – consumo específico )/( sl ;
pη - eficiência do motor;

15
Descida e aterragem
997.0~990.0/WW 1-ii =
Os valores de arrasto parasita e factor de eficiência de Oswald, 0DC e e respectivamente, são
inicialmente admitidos com o valor de 0.02 e 0.85 porque nesta fase ainda não existem dados
suficientes para qualquer estimativa aerodinâmica.
Com estes valores todos, consegue-se determinar o valor de Wf/Wo com a expressão (2.9).
−=Wo
WxWoWf 106.1/ (2.9)
Onde Wx/Wo é o produto das fracções de todos segmentos da missão.
Com isto, consegue-se determinar Wo realizando iterações entre as expressões (2.2) e (2.9). Uma
vez encontrado o valor de Wo, determina-se We e Wf e S.

16
2.5 – Dimensionamento das proporções geométricas
O dimensionamento geométrico da asa pode ser feito com ajuda dos valores obtidos no passo
anterior e com os dados do aerofólio escolhido. Em primeiro lugar, determina-se o valor da
envergadura com ajuda da expressão (2.10).
ASb = (2.10)
onde
A – alongamento;
S – área alar )( 2ft ;
Em seguida, estabelece-se um valor de estreitamento da asa λ e um ângulo da linha que percorre
25% da corda ao longo da asa 4/CΛ . Estes valores podem ser escolhidos com ajuda das figuras
2.4 e 2.5.
Fig.2.4 – Tendências dos valores de alongamento vs 4/CΛ [8]

17
Fig.2.5 – Tendências dos valores de λ vs 4/CΛ [8]
Com estes valores assumidos, podem-se determinar os comprimentos das cordas na raiz, da ponta
e do centro aerodinâmico da asa com as expressões:
)1(
2
λ+=b
SC root (2.11)
roottip CC λ= (2.12)
λλλ
+++
=1
1
3
2 2
rootCc (2.13)
)1)(21(6
λλ ++=b
Y (2.14)
)1(
1tantan 4/ λ
λ−
−+Λ=ΛA
CLE (2.15)
onde
rootC - comprimento da corda na raiz )( ft ;
tipC - comprimento da corda na ponta )( ft ;

18
λ - relação de estreitamento;
b - envergadura de asa )( ft ;
c - comprimento da corda no centro aerodinâmico da asa )( ft ;
Y - distância do centro aerodinâmico da asa à linha central da aeronave )( ft ;
LEΛ - ângulo do bordo de ataque )(graus ;
A – alongamento;
S – área alar )( 2ft ;
Com os resultados das expressões, pode-se desenhar a asa como mostra a figura 2.6.
Fig.2.6 – Geometria da asa [8]
Quanto à geometria da fuselagem, não há grande especificação porque os UAV’s não precisam
de espaço interior para acomodar tripulantes. Sendo assim, a fuselagem apenas necessita de ter
espaço suficiente para acomodar o equipamento necessário e tanques de combustível. Convém
lembrar que a fuselagem deve apresentar um aspecto esguio, ou seja, que o comprimento seja
muito superior ao diâmetro máximo e que haja algum comprimento entre a asa e os planos
horizontal e vertical da empenagem, de modo a facilitar o momento produzido pelas superfícies
de controlo.

19
Por último, os planos horizontal e vertical da empenagem podem ser dimensionadas por um
método simples (expressões 2.16 e 2.17) em que só e preciso admitir uma distância entre os
centros aerodinâmicos das asas e o coeficiente volumétrico da cauda, que é obtido através do
anexo II.
VT
WWVT
VTL
SbcS = (2.16)
HT
WWHT
HTL
SCcS = (2.17)
onde
Wb - envergadura da asa principal )( ft ;
WS - área da asa principal )( 2ft ;
VTL - distância do centro aerodinâmico da asa ao plano vertical da empenagem
(figura2.5.4) )( ft ;
HTL - distância do centro aerodinâmico da asa ao plano horizontal da empenagem
(figura2.5.4) )( ft ;
WC - comprimento da corda no centro aerodinâmico da asa )( ft ;
HTc - coeficiente volumétrico do plano horizontal da empenagem;
VTc - coeficiente volumétrico do plano vertical da empenagem;
HTS - área alar do plano horizontal da empenagem )( 2ft ;
VTS - área alar do plano vertical da empenagem )( 2ft ;

20
Fig.2.7 – Posições das asas [8]
Com os valores das áreas alares dos planos da empenagem, consegue-se facilmente determinar a
geometria aplicando o mesmo método usado para determinar a geometria da asa principal.
O dimensionamento das proporções geométricas fica assim concluído, com informação suficiente
para fazer os desenhos da aeronave.

21
2.6 – Análise aerodinâmica
O estudo aerodinâmico é outra área importante na concepção de aeronaves visto que estas usam o
ar para produzir a força necessária de sustentação e as forças para o controlo de nível e direcção
de voo. Porém, estas forças são criadas por meio de fricção que dá origem a uma força de arrasto.
Esta força de arrasto é designada de arrasto induzido para sustentação.
Outra força que também produz arrasto é a força relacionada com a fricção de todas superfícies
em contacto com o ar e que não produzem sustentação (fuselagem, antenas, trens de aterragem,
gôndolas ou “nacelles”). Esta força de arrasto é designada de arrasto parasita.
O estudo aerodinâmico vai incidir na geometria da aeronave escolhida subcapítulo anterior (2.5) e
estimar valores importantes para a condição predominante de voo (usualmente correspondente à
condição de voo cruzeiro) e que são necessários para os passos seguintes.
Basicamente, uma situação de voo em equilíbrio pode ser traduzida pelas equações (2.18) e
(2.19).
LqSCLW == (2.20)
DqSCDT == (2.19)
onde
W - peso da aeronave (lb);
L - força de sustentação (lb);
T - força de impulsão (lb);
D - força de arrasto (lb);
S – área alar )( 2ft ;
LC - coeficiente de sustentação;
DC - coeficiente de arrasto;
Como já tinha sido referido acima, o coeficiente de arrasto DC é o resultado do arrasto parasita e
do arrasto induzido para sustentação e pode ser determinado pela expressão (2.20).

22
( )2min0 LLDD CCKCC −+= (2.20)
onde
0DC - arrasto parasita;
K - factor de arrasto induzido para sustentação;
LC - coeficiente de sustentação;
minLC - valor de LC mínimo (no caso de aerofólios assimétricos);
O valor de arrasto parasita vai depender do formato e de toda a superfície que esteja em contacto
com o ar, bem como todo o arranjo dos diferentes componentes que constituem a aeronave.
O método das componentes permite determinar este valor, associando os coeficientes de atrito
local, áreas de contacto, factores de forma e interferência de cada componente. As seguintes
expressões permitem determinar o valor do arrasto parasita.
( )ref
wetf
DS
SQFFCC
...0
Σ= (2.21)
µρVl
R = (2.22)
( ) ( ) 65.02581.210 144.01log
455.0
MRC f
+= (2.23)
Factor de forma da asa e planos da empenagem
( )( )[ ]28.018.0
4
cos34.1100/
6.01 m
m
Mc
t
c
t
cxFF Λ
+
+= (2.24)
Factor da fuselagem
++=
400
601
3
f
fFF (2.25)

23
Factor de forma das gôndolas ou “nacelles”
+=
fFF
35.01 (2.26)
( ) max/4 A
lf
π= (2.27)
onde
fC - coeficiente de atrito local;
Q - factor de interferência (1~1.5 dependendo da proximidade dos componentes);
FF - factor de forma;
wetS - superfície exposta ao fluxo de ar )( 2ft ;
refS – área alar )( 2ft ;
R - número de Reynolds;
ρ – densidade do ar )/( 3ftsl ;
V - velocidade do ar )/( sft ;
l - comprimento do componente )( ft ;
µ - viscosidade do ar )//( sftsl ;
M – número de mach;
( )mcx / - local da corda onde a espessura aerofólio é máxima )( ft ;
ct / - relação entre a espessura e a corda do aerofólio escolhido;
mΛ - ângulo da linha correspondente à máxima espessura do aerofólio )(graus ;
maxA - área máxima frontal )( 2ft ;
O factor de arrasto induzido para sustentação K, pertencente ao segundo termo da expressão
(2.21), pode ser estimado pelo método da eficiência de Oswald e que é traduzido pelas expressões
2.28 a 2.30
AeK
π1
= (2.28)

24
Para asas rectangulares
64.0)045.01(78.1 68.0 −−= Ae (2.29)
Para asas com grausLE 30>Λ
1.3))(cos045.01(61.4 15.068.0 −Λ−= LEAe (2.30)
onde
K - factor de arrasto induzido para sustentação;
A – alongamento;
e – factor de eficiência Oswald;
No que diz respeito à sustentação, é preciso determinar o valor de maxLC efectivo da asa.
Anteriormente, mostrou-se que este valor podia ser facilmente estimado para os passos iniciais
(correspondente a 90% maxlC do aerofólio), mas agora que se tem a geometria da asa, pode ser
determinada da seguinte maneira:
4/maxmax cos9.0 clL CC Λ= (2.31)
Esta expressão permite obter valores coerentes para condições de voo a baixa velocidade e pode-
se verificar que para ângulos baixos da linha a 25% da corda, maximiza-se o coeficiente de
sustentação. Para velocidades superiores ( 2.0>M ), o método semi-gráfico é mais apropriado,
mas como os UAV’s são aeronaves lentas, não é necessário recorrer a tal método.
Outro valor importante, é o valor da curva característica de sustentação da asa ou αLC que
permite como o nome indica traçar a curva de sustentação da asa dentro do domínio linear. Este
valor é determinado pela expressão (2.32).
( )FS
S
A
AC
ref
osed
t
L
Λ+++
= exp
2
max2
2
22 tan142
2
βηβ
πα (2.32)

25
22 1 M−=β (2.33)
2
107.1
+=b
dF (2.34)
onde
αLC - curva característica de sustentação da asa (1/rad);
A – alongamento;
β - factor de Prantl-Glauert;
M – número de mach;
tmaxΛ - ângulo da linha correspondente à máxima espessura do aerofólio )(graus ;
osedSexp - superfície da asa exposta ao fluxo de ar )( 2ft ;
refS - área alar )( 2ft ;
F - factor de sustentação da fuselagem;
d - diâmetro da fuselagem entre a asa )( ft ;
b - envergadura de asa )( ft ;
Com a expressão 2.35, consegue-se obter o coeficiente de sustentação para diferentes ângulos de
ataque.
)( OLLL CC ααα −= (2.35)
onde
αLC - curva característica de sustentação da asa (grau-1);
α – ângulo de ataque (graus);
OL∂ - ângulo de sustentação nula do aerofólio (graus);
Estes são valores mais importantes para as fases seguintes de concepção. Outros valores como
arrasto e sustentação em situações em condições de aterragem (com o trem de aterragem e
“flaps” em baixo) também podem ser determinados para uma análise mais pormenorizada.

26
Para uma análise mais profunda, pode-se recorrer a ensaios em túnel de vento com modelo à
escala e simulações em CDF (Computacional Fluid Dynamics) para diferentes condições de voo.
Numa fase inicial de concepção, não se justifica fazer uma análise rigorosa com estes
procedimentos dado que consomem muito tempo e orçamento no caso dos ensaios em túnel de
vento.

27
2.7 – Estimativa de pesos
A estimativa de pesos é uma parte crítica na concepção de aeronaves porque o peso
interfere com muitos dos diferentes passos de todo o processo. O peso vazio We para um
dado peso máximo à descolagem Wo foi determinado anteriormente com os processos
descritos acima, mas este valor de We foi submetido sobre a condição de como um todo.
A estimativa de pesos permite determinar o peso das diferentes partes que compõem a
aeronave, oferecendo-nos uma noção mais precisa do peso vazio We e possivelmente um
crescimento de peso em relação ao valor anteriormente calculado. Outra parte importante
desta parte é que, permite saber a localização exacta do centro de gravidade da aeronave
como a sua oscilação durante a missão. Esta informação é vital para os estudos de
estabilidade que serão vistos mais tarde.
Para a categoria de aviação geral, aplica-se o seguinte método para determinar o peso dos
diferentes elementos:
( ) 49.00
3.0
04.0006.06.0
2
0035.0758.0
cos
/100
cos036.0 WN
ctq
AWSW zfwwwing
−
Λ
Λ
= λ (2.36)
( ) 02.0
043.0
2
12.0
896.0168.0414.00
coscos
/100016.0 −
−
Λ
Λ= h
htht
htzht
ActSqWNW λ (2.37)
( ) 039.0
357.0
2
12.0
873.0122.0376.00
coscos
/1002.01073.0 h
vtvt
vtz
v
t
vt
ActSqWN
H
HW λ
Λ
Λ
+=
−
(2.38)
( ) presstzffuselage WqDLLWNSW += −− 241.0072.0051.0177.00
086.1 )/(052.0 (2.39)
271.0)(9.11 deltaprpress PVW += (2.40)

28
( ) ( ) 409.0768.0 12/095.0 mllgearlandingmain LWNW = (2.41)
( ) ( ) 845.0566.0 12/125.0 nllgearlandingnose LWNW = (2.42)
enenengineinstalled NWW922.0575.2= (2.43)
157.0242.0
363.0
726.0
/1
149.2 ent
ti
tsystemfuel NNVV
VW
+= (2.44)
( ) 80.040
371.0536.1 10053.0 −×= WNBLW zwcontrolsflight (2.45)
0001.0 WWhydraulics = (2.46)
933.0117.2 uavavionics WW = (2.47)
( ) 51.057.12 avionicssystemfuelelectrical WWW += (2.48)
08.068.052.00265.0 MWNWW avionicspiceantiandngconditioniair =− (2.49)
650582.0 0 −= WW sfurnishing (2.50)

29
onde
A - alongamento;
wB - envergadura de asa )( ft ;
vt HH / - 0 para cauda convencional e 1 para cauda em ‘T’;
L - comprimento da fuselagem )( ft ;
mL - comprimento do trem principal )(in ;
nL - comprimento do trem frontal )(in ;
tL - distância do centro aerodinâmico da asa principal ao centro aerodinâmico da
cauda )( ft ;
M - número de mach;
enN - número de motores;
lN - factor de carga de aterragem ( )5.1×gearN ;
pN - número de tripulantes a bordo;
tN - factor de tanques de combustível;
zN - factor de carga estrutural;
deltaP - diferencial de pressão da cabina )(psi ;
q – pressão dinâmica em voo cruzeiro )/( 2ftlb ;
fS - superfície da fuselagem exposta ao fluxo de ar )( 2ft ;
htS - área do plano horizontal da empenagem )( 2ft ;
vtS - área do plano vertical da empenagem )( 2ft ;
WS - área da asa principal )( 2ft ;
iV - volume dos tanques internos )(gal ;
prV - volume da área pressurizada )( 3ft ;
tV - volume total de combustível )(gal ;
0W - peso máximo à descolagem )(lb ;
enW - peso de cada motor )(lb ;
fwW - peso de combustível nas asa )(lb ;
lW - peso máximo à aterragem(varia entre 70 a 95% de 0W ) )(lb ;

30
pressW - penalização de peso devido à pressurização )(lb ;
uavW - peso da aviónica não instalada )(lb ;
wingW - peso da asa )(lb ;
htW - peso do plano horizontal da empenagem )(lb ;
vtW - peso do plano vertical da empenagem )(lb ;
fuselageW - peso da fuselagem )(lb ;
gearlandingmainW - peso do trem principal )(lb ;
gearlandingnoseW - peso do trem frontal )(lb ;
engineinstalledW - peso do motor instalado )(lb ;
systemfuelW - peso dos sistemas de alimentação de combustível )(lb ;
controlsflightW - peso dos sistemas de controlo d voo )(lb ;
hydraulicsW - peso dos hidráulicos )(lb ;
avionicsW - peso da aviónica )(lb ;
electricalW - peso da instalação eléctrica )(lb ;
iceantiandngconditioniairW − - peso dos sistemas de ar condicionado e anti-gelo )(lb ;
sfurnishingW - peso dos acabamentos )(lb ;
Λ - ângulo da linha correspondente à 25% da corda do aerofólio )(graus ;
Estes valores são depois somados e comparados com o valor de We calculado. Normalmente a
diferença é mínima e pode ser facilmente ajustada. Caso a diferença seja notável, é sinal que algo
nos cálculos anteriores não está correcto e terá de ser revisto.
No caso dos UAV’s, existe uma série de componentes que podem ser suprimidos e outros que
podem ser parcialmente ponderadas porque não necessitam de cabine nem de equipamento tão
completo como uma aeronave tripulada.

31
2.8 – Propulsão
A propulsão é a forma como as aeronaves desenvolvem impulsão por meio de incitação de ar na
direcção oposta ao do movimento. Esta força de impulsão tem que ser igual ou superior à força
de arrasto para que se tenha uma condição de voo estacionário ou acelerado.
Tipicamente, as aeronaves usam propulsão a hélice (motores alternativos, motores eléctricos e
turbo-hélice) ou propulsão a jacto (turbinas a gás e “ramjets”). Como os UAV’s são aeronaves
que desempenham missões a velocidades baixas, os sistemas de propulsão a jacto podem ser
excluídos porque o rendimento propulsivo destes sistemas a baixas velocidades é muito baixo,
tornando-o viável para altas velocidades.
Nesta fase, procura-se satisfazer a relação hp/Wo (potência/peso) que foi estabelecida
inicialmente na fase em que se calcula o valor de Wo e é feita uma avaliação de certos aspectos
para garantir que existe força de impulsão suficiente.
Geralmente, procura-se um motor que possua potência necessária e procede-se a sua instalação
com a selecção de tamanho ideal da hélice com ajuda das expressões 2.51 e 2.52
Duas pás: 422 hpd = (2.51)
Três pás: 418 hpd = (2.52)
onde
d - diâmetro ideal da hélice )( ft ;
hp – potência do motor )(hp ;
Mas este diâmetro calculado é o diâmetro ideal se os efeitos compressíveis fossem ignorados,
coisa que não acontece na realidade. Então, para se evitar os efeitos compressíveis nas pontas das
pás, tem-se:
( )60
dnV
statictip
π= (2.53)

32
( ) 22 VVV tiphelicaltip += (2.54)
onde
n - regime de funcionamento do motor )(rpm ;
d - diâmetro da hélice )( ft ;
V - velocidade da aeronave )/( sft ;
statictipV - velocidade tangencial da pá )/( sft ;
helicaltipV - velocidade total da pá )/( sft ;
Como se pode ver, o tamanho da hélice vai ser limitada pela imposição de 950 ft/s para a
velocidade total da pá ao nível do mar, implicando que o diâmetro da hélice seja inferior ao
diâmetro da hélice ideal.
Escolhido o motor e o tamanho da hélice, é altura de proceder às correcções para prever as
possíveis perdas de impulsão porque a eficiência do motor varia com a altitude e o rendimento da
hélice com a velocidade. Para se prever a fracção destas perdas, procede-se as seguintes
correcções:
−−=
55.7
/1 0
0
ρρρρ
LSbhpbhp (2.55)
nD
VJ = (2.56)
53
550
Dn
bhpcp ρ
= (2.57)
nD
bhp
c
cT
P
T 550= (2.58)
( )
−= ∑ washedwetfePPeefective SCD 0
2
558.11
ρρ
ηη (2.59)

33
onde
n - regime de funcionamento do motor )(rps ;
D - diâmetro da hélice )( ft ;
bhp - potência do motor na altitude considerada )(hp ;
SLbhp - potência do motor ao nível do mar )(hp ;
ρ - densidade do ar na altitude considerada )/( 3ftsl ;
0ρ - densidade do ar ao nível do mar )/( 3ftsl ;
J - relação de avanço;
V - velocidade )/( sft ;
pc - coeficiente de potência ;
PT cc / - relação entre coeficiente de impulsão e coeficiente de potência;
T - força de impulsão )(lb ;
Pη - rendimento da hélice;
Peefectiveη - rendimento efectivo da hélice;
feC - coeficiente de atrito local;
( )washedwetS - superfície exposta ao fluxo de ar induzido pela hélice )( 2ft ;
Como se pode denotar nas expressões acima, alguns valores como PT cc / e Pη não tem forma de
ser calculados sem que seja feita uma análise muito aprofundada nas características da hélice.
Para evitar um acréscimo desnecessário de complexidade, o método semi-gráfico é mais prático
e mais simples já que com a informação disponível pelos fabricantes se pode obter bons
resultados. As figuras 2.8 e 2.9 mostram a informação característica de uma hélice de três pás.
Usualmente, este tipo de informação costuma estar disponível para hélices de três e quatro pás
com diversas características. Hélices com duas ou cinco ou mais pás, podem ser extrapoladas a
partir da informação das hélices de três e quatro pás. Para hélices de duas pás, consegue-se uma
boa e rápida estimativa com a atribuição de +3% nos valores rendimento e -5% nos valores da
impulsão estática da hélice de três pás.

34
Fig.2.8-Impulsão estática da hélice [8]
Fig.2.9-Rendimento da hélice [8]

35
2.9 – Análise de desempenho
A análise de desempenho incide sobre a capacidade da aeronave de cumprir os objectivos
estabelecidos. Basicamente, é o tratamento e estudo de toda a informação criada anteriormente
nas diversas condições de voo que a aeronave poderá encontrar.
O desempenho é um campo de elevada importância e para tal, uma enorme quantidade de
cálculos é realizada para se obter informação suficiente sobre as características da aeronave. No
caso dos UAV’s, sendo aeronaves destinadas a missões de vigilância ou reconhecimento, não há
necessidade de estudar o desempenho em condições extremas de voo. Pode-se assumir que
análises de desempenho nas condições de voo nivelado, voo ascendente e voo planado, sejam
suficientes para determinar as capacidades dum UAV.
Também podem ser consideradas as análises de descolagem e aterragem se tal for algum factor
crítico nos requisitos. Isto pode ser o caso de UAV’s de grandes dimensões e destinadas a
realizar missões de durações extremas. Mas como o estudo incide sobre aeronaves menores, não
há necessidade para tal.
Impulsão mínima para o voo nivelado
0min
2
D
dragC
K
S
WV
ρ= (2.60)
K
CC D
dragL
0min = (2.61)
( )00min DDdrag CCqSD += (2.63)
Raio de acção
=
=
Wf
Wi
D
L
CWf
Wi
D
L
C
VR
bhp
pln
550ln
η (2.64)

36
Razão de subida
−=
W
DTVVV (2.65)
−= −
W
DT1sinγ (2.66)
onde
VV - velocidade vertical – razão de subida )/( sft ;
γ - ângulo de subida )(graus ;
D – força de arrasto )(lb ;
Voo planado maximizando o alcance
0/max
2
D
DLC
K
S
WV
ρ= (2.67)
K
CC D
DLL
0/max = (2.68)
0max 2
1/
DC
AeDL
π= (2.69)
Voo planado minimizando a razão de descida
0sinmin 3
2
D
kC
K
S
WV
ρ= (2.70)
K
CC D
kL
0sinmin
3= (2.71)
0sinmin 16
3/
D
kC
AeDL
π= (2.72)

37
2.10 – Optimização
O procedimento de optimização consiste no melhoramento da aeronave já estudada até então.
Visto que as fases anteriores já foram capazes de gerar informação suficiente da aeronave, pode-
se fazer variar certos aspectos e perceber de imediato o seu efeito.
Usualmente, selecciona-se dois aspectos fazem-se variar uma certa percentagem acima e abaixo
do valor da aeronave de referência (aeronave estudada até então). Isto resulta numa matriz 3X3,
ou seja, permite estudar oito aeronaves diferentes baseadas na aeronave de referência e que para
cada uma é feita uma estimativa de peso máximo à descolagem.
Como se pode verificar, este processo é muito exaustivo porque envolve a repetição de muita
coisa já realizada oito vezes. Para evitar este trabalho todo, é aconselhado identificar todas
variáveis dependentes dos aspectos seleccionados e encontrar uma relação que permita calcular
essas mesmas variáveis em função da variação dos aspectos seleccionados. Isto pode evitar a
necessidade de um estudo profundo como foi realizado para a aeronave de referência.
Encontrado o peso máximo à descolagem e mais algumas características importantes de cada
aeronave, procede-se à selecção das condições de fronteira e traça-se o diagrama de optimização.
A aeronave ideal para os requisitos será então identificada e estudada ao pormenor.
Para aumentar a precisão da optimização, pode-se fazer variar os aspectos com mais intervalos ou
fazer variar três ou mais aspectos ao mesmo tempo. O benefício é que se obtém uma melhor
precisão mas em contrapartida, o nível de complexidade e trabalho aumenta drasticamente. Por
exemplo, fazer variar dois valores acima e abaixo de dois aspectos resulta numa matriz 5X5
(equivalente a estudar 24 aeronaves diferentes para além da aeronave de referência) ou fazer
variar três aspectos com um valor acima e abaixo resulta numa matriz 3X3X3 (equivalente a
estudar 26 aeronaves diferentes para além da aeronave de referência).

38
2.11 – Estabilidade e controlo
A parte de estabilidade e controlo é outra secção fundamental na concepção de aeronaves, pois
permite organizar e ajustar a mesma para que tenha características de voo estáveis e controláveis.
Uma aeronave estável é uma aeronave que apresenta um certo equilíbrio na distribuição dos
pesos de modo que seja capaz de realizar um voo nivelado sem constantes ajustes de controlo
(efeito de fugóide reduzido ou nulo) e que em caso de mudança de atitude, se mantenha livre de
flutuações indesejadas que acabam por resultar em perda de controlo.
O estudo da estabilidade é composto pela análise estática e pela análise dinâmica.
A análise dinâmica consiste sobre o estudo de diversas condições de voo nas quais se têm em
consideração os seis graus de liberdade, reflectindo uma complexidade elevada e elevado
consumo de tempo. Assim, é deixado a cargo de programas sofisticados de computador
especialmente desenvolvidos para estes estudos ou para ensaios em túnel de vento.
Por outro lado, a análise estática assenta sobre condições de estudo pré-estabelecidas e é a que
permite tornar a aeronave “estável” até uma fase de desenvolvimento avançada.
A análise estática é composta pela estabilidade longitudinal e pela estabilidade lateral, sendo que
a estabilidade longitudinal prevalece sobre a estabilidade lateral, ou seja, a estabilidade é
garantida pelo caso longitudinal porque normalmente as aeronaves são lateralmente simétricas e a
estabilidade lateral fica reservada para o dimensionamento das superfícies de controlo do plano
vertical da empenagem.
Estabilidade longitudinal
A estabilidade longitudinal resume-se ao equilíbrio dos momentos em relação ao centro de
gravidade da aeronave e visto que o centro de gravidade numa aeronave não é fixo devido à
variação da quantidade de combustível ou do peso da carga a transportar, é preciso ter o
conhecimento da posição do centro de gravidade mais adiante (mais próximo do nariz) e a
posição mais afastada (mais longe do nariz).
A situação crítica para o caso do equilíbrio de momentos encontra-se quando a posição do centro
de gravidade é mais afastada, enquanto que a situação critica no caso de equilíbrio via deflexão
da empenagem encontra-se quando a posição do centro de gravidade é mais adiante.

39
A figura 2.10 demonstra os momentos longitudinais.
Fig.2.10- Situação típica de estudo da estabilidade longitudinal [8]
Os momentos em torno do centro de gravidade pode-se traduzir por:
( ) ( ) ( )pcgptcgachhfuswacwcgcg XXFTZXXLMMXXLM −+−−−++−= (2.73)
onde
cgM -momento em torno do centro de gravidade ).( inlb ;
L - força de sustentação da asa )(lb ;
cgX - posição do centro de gravidade )(in ;
acwX - posição da asa )(in ;
wM - momento produzido pela asa ).( inlb ;
fusM - momento produzido pela fuselagem ).( inlb ;
hL - força de sustentação da empenagem;
achX - posição da empenagem )(in ;
T - força de impulsão )(lb ;
tZ - braço da impulsão )(in ;
pF - força normal da hélice )(lb ;

40
pX - posição da entrada de ar ou hélice )(in ;
Dividindo todos os termos da expressão 2.74 por ( cqSw ), origina:
( )cqS
XXF
cqS
TZ
c
XXC
S
SCC
c
XXCC
w
pcgp
w
tcgach
Lh
w
h
mfusmw
acwcg
Lmcg
−+−
−−++
−=
ηα (2.74)
Termo do momento produzido pela asa
Λ+Λ
=cos2
cos2
0A
ACC mmw (2.75)
Termo do momento produzido pela fuselagem
w
fff
mfuscS
LWKC
2
= (2.76)
Termo do momento produzido pelos efeitos de impulsão
)(TfC
AqNF NbladepBp α∂
∂= (2.77)
onde
c - comprimento da corda no centro aerodinâmico da asa )(in ;
η - rácio de pressão dinâmica entre a asa e a empenagem (0.85-0.90);
wS - área alar da asa )( 2in ;
hS - área alar do plano horizontal da empenagem )( 2in ;
0mC - coeficiente do momento do aerofólio;
fW - largura da fuselagem )(in ;
fL - comprimento da fuselagem )(in ;
BN - numero de pás;
pA - área varrida pela hélice )( 2in ;
Os restantes termos fK , α∂
∂ NbladeC e )(Tf podem ser determinados pelas figuras 2.11, 2.12 e
2.13.

41
Fig.2.11- Posição de 25% da corda da raiz [8]
Fig.2.12- Coeficiente da força normal da hélice [8]

42
Fig.2.13 – Factor da força normal da hélice [8]
Quando ocorre uma mudança no ângulo de ataque, os momentos em torno do centro de gravidade
sofrem alterações e é então considerado o equilíbrio em função dos efeitos associados a esta
variação. Este equilíbrio pode ser traduzido por:
( )cqS
XXF
c
XXC
S
SC
c
XXCC
w
pcgppcgachh
Lh
w
h
mfus
acwcg
Lm
−
∂
∂+
−
∂
∂−+
−=
α
α
ααη
αα (2.78)
Sendo que o ponto neutro de rotação encontra-se na posição npX .
( )
cqS
FC
S
SC
cqS
XF
c
XC
S
SC
c
XC
c
X
w
phLh
w
hL
w
pppachhLh
w
hmfus
acwL
np
+∂
∂+
∂
∂+
∂
∂−+
=
ααη
α
α
ααη
α
α
(2.79)
Onde α
α
∂
∂ representa o efeito do escoamento criado pela asa (figura 2.14) que pode produzir
momentos negativos ou positivos na empenagem, caso a posição desta se encontre à frente (fluxo
ascendente) ou atrás da asa (fluxo descendente).

43
Fig.2.14 – Efeito de escoamento sobre a asa [8]
O efeito do escoamento ascendente em função da posição da asa pode ser determinado pela figura
2.15.
Fig.2.15 – Efeito de escoamento ascendente antes da asa [8]
E o efeito do escoamento descendente em função da posição da asa pode ser determinado pela
figura 2.16.

44
Fig.2.16 – Efeito de escoamento descendente depois da asa [8]
O efeito total sobre a empenagem pode-se traduzir por:
αα
α
∂∈∂
−=∂
∂1 (2.80)
)(1)( whwh iii −+
∂
∈∂−+=
ααα (2.81)
onde
hα - ângulo de ataque do plano horizontal da empenagem )(rad ;
α - ângulo de ataque )(rad ;
wi - ângulo da incidência da asa )(rad ;
hi - ângulo da incidência do plano horizontal da empenagem )(rad ;

45
Para se conseguir uma boa estabilidade longitudinal, é preciso que o equilíbrio de momentos em
função da variação de ângulo de ataque αmC seja nulo. Isto vai resultar na expressão 2.82.
−−=
c
XXCC
cgnp
Lm αα (2.82)
Em que o termo
−
c
XX cgnp é a margem estática e é o que vai condicionar a estabilidade
longitudinal. Tipicamente, uma aeronave estável possui uma margem estática positiva, embora a
maioria apresente valores entre 5 a 10%.
Actualmente, com os avanços tecnológicos a nível da aviónica, muitas aeronaves começam a
apresentar uma estabilidade estática relaxada, ou seja, são estaticamente instáveis mas usam
controlos de voo inteligentes para compensar a instabilidade. Isto pode ser vantajoso em
determinados aspectos mas é sempre uma mais valia garantir a estabilidade sem ajudas externas.
Quanto à outra situação crítica de estabilidade longitudinal (quando o centro de gravidade se
encontra mais adiante e é aplicada uma deflexão no plano horizontal da empenagem para
estabelecer o equilíbrio), pode ser estudada com base na expressão 2.78 e nas expressões 2.83 e
2.84.
−−+
∂
∈∂−+= LhwhwhLLh iiiCC 0)(1)( α
ααα (2.83)
Lh
w
wLLtotal CS
ShiCC ηαα ++= )( (2.84)
onde
Lh0α - ângulo de ataque em que a sustentação é nula no plano horizontal da
empenagem )(rad ;
hLC α - curva característica de sustentação do plano horizontal da empenagem (1/rad);
LhC - coeficiente de sustentação efectivo do plano horizontal da empenagem;
LtotalC - coeficiente de sustentação total;

46
Estabilidade lateral
Com a estabilidade longitudinal assegurada, o estudo da estabilidade lateral vai servir apenas para
dimensionar o plano vertical da empenagem e as suas superfícies de controlo como também o
ajuste da posição lateral dos motores (caso tenha mais que um motor).
Existem duas situações críticas no estudo da estabilidade lateral que correspondem à situação em
que a aeronave se encontra em deslize lateral com vento e à situação em que um dos motores está
inoperável e o outro em potência máxima (situação de impulso assimétrico). Ambas situações são
analisadas para a condição de voo a uma velocidade próxima à da velocidade de perda stallV .
A figura 2.17 demonstra o caso típico de estudo da estabilidade lateral com todos efeitos
associados.
Fig.2.17 – Situação típica de estudo da estabilidade lateral [8]
As situações de guinada e rolamento podem ser traduzidas por:
Guinada
( ) ( )pcgpppfusawwcgacvv XXFDYTYNaNNXXFN −−−−+++−= δδ (2.85)

47
Rolamento
( )vvaww ZFaLLL −+= δδ (2.86)
onde
N - momento lateral em torno do centro de gravidade ).( inlb ;
vF - força lateral no plano vertical da empenagem )(lb ;
wN - momento produzido pela asa ).( inlb ;
awN δ - momento produzido pela deflexão dos “ailerons” ).( inlb ;
aδ - ângulo de deflexão dos “ailerons” )(rad ;
fusN - momento produzido pela fuselagem ).( inlb ;
T - força de impulsão )(lb ;
pY - braço da impulsão )(in ;
D - força de arrasto correspondente ao motor parado )(lb ;
pF - força normal da hélice )(lb ;
acvX - posição do plano vertical da empenagem )(in ;
L - momento lateral em torno do eixo X ).( inlb ;
wL - momento produzido pela asa ).( inlb ;
awL δ - momento produzido pela deflexão dos “ailerons” ).( inlb ;
vZ - distância da linha central ao centro aerodinâmico do plano vertical da
empenagem )(in ;
Dividindo todos os termos das expressões acima por ( bqSw ), origina:
Guinada
( )bqS
XXF
bqS
DY
bqS
TYCaCCCC
w
pcgp
w
p
w
p
fusnanwnvnn
−−−−+++= βδββ βδββ (2.87)

48
Em que,
( ) ( )b
XX
S
SC
bqS
XXFC
cgacv
w
vvvvtL
w
cgacvv
vn
−
∂
∂=
−=
ββ
ηαβ (2.88)
AD
ZS
S
f
wfw
v
v
v 009.04.0cos1
06.3
724.0 +−Λ+
+=
∂
∂
ββ
η (2.89)
Termo do momento produzido pela asa na guinada
( )
Λ−+
Λ−−Λ
Λ+Λ
−=Ab
XXAA
AAACC
cgacw
Lwn
sin)(6
cos82cos
cos4
tan
4
1 22
ππβ (2.90)
Rolamento
aCCCC alwlvll δββ δββ ++= (2.91)
Em que,
( ) ( )b
Z
S
SC
bqS
ZFC v
w
vv
vvtL
w
vv
vl ββ
ηαβ ∂
∂−=−= (2.92)
Termo do momento produzido pela asa no rolamento
( ) wfllL
L
wingl
wl CCCC
CC ββ
ββ ++
=
Γ (2.93)
Contribuição do efeito geométrico ângulo de diedro da asa
( )
++Γ
−=Γ )1(3
)21(2
4 λλα
βL
l
CC (2.94)

49
Contribuição do efeito da posição vertical da asa na fuselagem
( )2
2.1b
WDZAC
ffwf
wfl
+−=β (2.95)
Sendo que o valor de
L
wingl
C
C β pode ser estimado com base na figura 2.18.
Fig.2.18 – Efeito diedro na flecha da asa [8]
Termo do momento produzido pela fuselagem
−=
f
f
w
fus
nfusW
D
bS
VC 3.1 (2.96)
Termo do momento produzido pela deflexão dos “ailerons”
alLalan CCCC δδδ 2.0−== (2.97)
onde
β - ângulo de deslize lateral )(rad ;
vtLC α - curva característica de sustentação do plano vertical da empenagem (1/rad);
wS - área alar da asa )( 2in ;
vS - área alar do plano vertical da empenagem )( 2in ;

50
wfZ - posição vertical da asa em relação à linha central da fuselagem )(in ;
fD - comprimento da fuselagem )(in ;
fW - largura da fuselagem )(in ;
LC - coeficiente de sustentação;
Γ - ângulo de diedro )(rad ;
fusV - volume da fuselagem )( 3in ;
alC δ - incremento de sustentação na asa devido à deflexão do “aileron”;

51
2.12 – Análise de estruturas
A análise de estruturas é o ultimo passo do desenvolvimento conceptual, pois a análise de custos
para este tipo de aeronave não apresenta grande complexidade devido às suas dimensões e a
quantidade de materiais usada na sua fabricação.
Na análise de estruturas procura-se determinar os esforços que a aeronave vai estar sujeita nas
condições mais desfavoráveis e garantir que a mesma resiste sem que haja um aumento de peso
relativamente ao calculado anteriormente.
A determinação dos esforços é baseada no factor de carga n que simboliza o número de vezes em
que se está sujeito à aceleração da gravidade (por exemplo n = 2g significa que se está sujeito a
uma carga equivalente a duas vezes o peso da aeronave). O factor de carga pode variar de valores
entre 1 (situação de voo nivelado) e 9 (situação super crítica de uma aeronave de combate ou
acrobática em curva apertada), dependendo do tipo de serviço que a aeronave vai desempenhar.
Aeronaves destinadas a operar em condições mais severas implicam um factor de carga elevado,
enquanto que aeronaves destinadas a voos suaves e calmos podem usar factores de carga mais
baixos (tipicamente acima de 2.5 para garantir segurança em relação a vidas humanas). No que
diz respeito a Mini-UAV’s não é necessário terem factores de carga elevados porque não vão
suportar condições rigorosas e, como tal factores de carga a partir de 1.5 já se podem considerar
aceitáveis. Convém lembrar que o factor de carga é depois multiplicado pelo factor de segurança
(tipicamente 1.5) para originar o factor de carga efectivo.
Admitidos os factores de carga positivos e negativos, traça-se o diagrama V-n de manobra
(diagrama velocidade – factor de carga) que irá mostrar os pontos mais críticos em que a
aeronave vai operar. A figura 2.19 mostra um típico diagrama V-n de manobra.

52
Fig.2.19 – Diagrama V-n de manobra [8]
No diagrama V-n de manobra podem-se encontrar pontos críticos quando o ângulo de ataque é
máximo à velocidade de mergulho DiveV (situação de elevado ângulo de ataque com a máxima
pressão dinâmica associada). A velocidade de mergulho DiveV pode ser estimada como sendo a
velocidade terminal da aeronave (quando o arrasto iguala ao peso e a força de arrasto só depende
do arrasto parasita) ou simplesmente pode ser assumida como um valor acima da velocidade de
cruzeiro porque o mergulho vertical é uma manobra mais usual em aeronaves de combate.
Os esforços considerados no diagrama V-n de manobra podem sofrer alterações quando a
aeronave é sujeita a turbulência. Neste caso, os esforços limites vão variar consoante a
intensidade do vento investido sobre a aeronave. Tipicamente, a velocidade do vento de rajada
deU é assumida com um valor de 25 ft/s para velocidades de mergulho, 50 ft/s para velocidades
de cruzeiro e 60 ft/s para velocidades de baixas (estes valores são normalizados).
E o efeito da turbulência pode ser traduzido da seguinte forma:
αρµ
LCcg
SW )/(2= (2.98)
µµ
+=
3.5
88.0gK (2.99)

53
)/(4981
SW
CVUKn
Ldeg α±= (2.100)
onde
µ - rácio de massa;
g - aceleração da gravidade )/2.32( 2sftg = ;
gK - factor de alívio;
deU - velocidade da rajada )/( sft ;
Estes efeitos das rajadas combinados com os esforços de manobra resultam no diagrama V-n
combinado (figura 2.20).
Fig.2.20 – Diagrama V-n de combinado [9]

54
A intensidade dos esforços causados pela rajadas varia de aeronave para aeronave, sendo as
aeronaves mais pesadas as que sofrem menor intensidade e as aeronaves mais leves as que sofrem
maiores esforços. Isto é sinónimo de que uma aeronave leve como um Mini-UAV, sofrerá
elevados esforços adicionais devido às rajadas (fazendo com que o factor de carga limite do
diagrama de manobra duplique ou mesmo triplique) e dimensionar uma estrutura capaz de resistir
tais esforços iria tornar a aeronave demasiado pesada. Para evitar tal problema, a melhor solução
é a de excluir o serviço sobre condições atmosféricas rigorosas.
Basicamente, a análise estrutural pode-se resumir ao desenvolvimento de estruturas leves que
resistam aos esforços encontrados nas condições onde o factor de carga é máximo. Este
desenvolvimento pode ser feito com ajuda dos métodos fundamentais da mecânica estrutural.
Embora existam outros métodos mais complexos e mais precisos, não se justifica o tal empenho
porque os Mini-UAV’s são aeronaves pequenas e que devem ser simples.
55
3 - Caso de estudo
3.1 – Descrição
O exercício que se segue, consiste na aplicação do método descrito anteriormente e tem como
objectivo desenvolver uma célula miniatura de um veículo aéreo não tripulado (Mini-UAV) para
executar missões de apoio táctico e reconhecimento.
3.1.1 – Considerações especiais
É de referir que os cálculos necessários a realizar no dimensionamento foram previamente
programados de modo a facilitar todo o processo e os resultados serão representados com
unidades não típicas do sistema internacional (S.I.). Esta decisão deve-se ao facto da bibliografia
disponível se apresentar em unidades imperiais e também pelo simples facto deste tipo de
unidades ser usual no sector aeronáutico.
Para contornar esta adversidade, os valores mais importantes e as medidas finais, serão
convertidas para as unidades de sistema internacional.
3.2 - Especificações iniciais
3.2.1 – Características gerais
A aeronave terá de cumprir os seguintes requisitos
� Peso máximo à descolagem: 5 kg ou 11 lbs;
� Raio de acção: 50 km ou 27 n.m.;
� Velocidade de cruzeiro mínima: 50 km/h ou 27 kts;
� Dimensões reduzidas para fácil transporte: máximo 2 m ou 6.56 ft;

56
� Realização de missões à altitude: 150 ~ 300 m ou 500 ~ 1000 ft;
� Capacidade de transportar equipamento electrónico indispensável às missões;
� Fácil fabricação e de baixo orçamento;
� Operável por uma equipa de dois elementos.
3.2.2 – Perfil da missão
Como um dos requisitos principais é o limite de raio de acção, reparte-se a missão típica a
realizar em três segmentos importantes:
� 1º Segmento – voo cruzeiro de ida;
� 2º Segmento – espera (turno de vigilância sobre o alvo);
� 3º Segmento – voo cruzeiro de volta.
Este perfil apresenta-se vantajoso na medida que garantimos o regresso do equipamento ao ponto
de lançamento (situação vital em campo de batalha) e também na medida em que se trata de um
UAV.
O perfil detalhado da missão é representado na figura 3.1.
Fig.3.1 – Perfil da missão

57
As condições de velocidade nos segmentos de voo cruzeiro e espera são os seguintes:
Fig.3.2 Velocidades nos segmentos
Como referido anteriormente, assume-se a velocidade máxima Vmax com um valor aproximado
de 30% superior à velocidade de cruzeiro.

58
3.2.3 – Estudos preliminares
Para o estudo preliminar, procede-se ao método comparativo de aeronaves existentes para ajudar
a reunir informação necessária para o desenvolvimento da aeronave. Para tal, as figuras 3.3 e 3.4
apresentam especificações de algumas aeronaves.
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
0,0 0,5 1,0 1,5 2,0
W/S (lb/ft2)
A
Magister
Mentor
PM-Trainer
RQ-14A Dragon Eye
RQ-11B Raven
Fig.3.3 Gráfico Alongamento vs W/S
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
0,0 2,0 4,0 6,0 8,0W/P (lb/hp)
A
Magister
Mentor
PM-Trainer
RQ-14A Dragon Eye
RQ-11B Raven
Fig.3.4 Gráfico Alongamento vs W/P

59
Nas figuras 3.3 e 3.4, estão presentes cinco aeronaves de duas diferentes categorias. O primeiro
grupo de aeronaves é constituído pelo Magister (figura 3.5), Mentor (figura 3.6) e PM-Trainer
(figura 3.7) e são aeronaves de aeromodelismo que com algumas modificações básicas, podem
servir missões de reconhecimento. O segundo grupo de aeronaves é constituído pelo RQ-14 A
Dragon Eye (figura 3.8) e RQ-11 B Raven (figura 3.9) e são Mini-UAV´s propulsionados por
motores eléctricos.
Com a informação disponível nas figuras 3.3 e 3.4, consegue-se ter uma clara noção de algumas
especificações. E no problema em questão, uma solução que combine as características destas
duas categorias pode ser a mais indicada, ou seja, utilização de motores para aeronaves de
aeromodelismo para maximizar o raio de acção, visto que estes Mini-UAV’s de motores
eléctricos não vão além de 10.8 n.m. = 20km.
Sendo assim, pode-se apostar como valores iniciais de 6 para o alongamento e 6 para a relação
peso/potência W/hp.
Fig.3.5 Multiplex Magister [10]
Fig.3.6 Mentor [11]

60
Fig.3.7 PM-Trainer [12]
Fig.3.8 RQ–14 A Dragon Eye [13]
Fig.3.9 RQ–11 B Raven [14]

61
3.2.4 – Decisões iniciais
Já com os requisitos em consideração, é altura de se decidir o tipo de configuração a adoptar para
o problema. A configuração “pusher” seria ideal porque maximizaria a impulsão e deixaria o
nariz livre para a instalação da aviónica e câmaras, mas criaria problemas na operação de
lançamento manual e aterragens. Então a solução mais indicada recai sobre a configuração
esboçada na figura 3.10, fruto de estudos realizados no projecto “UAV-Veículo Aéreo Não
Tripulado” [15].
Fig.3.10 Esboço inicial [15]
Este tipo de configuração vai garantir uma operação de lançamento mais segura como uma
operação de aterragem em “deep-stall” sem que haja danos na hélice e vai permitir o alojamento
de toda aviónica no nariz da aeronave.
Outra decisão inicial importante recai na mobilidade, ou seja, a aeronave terá de ser facilmente
transportada por uma equipa de dois elementos. Isto pode ser muito complicado se o cenário de
serviço for no meio de um campo de batalha, em que a mobilidade é um factor crucial de
sobrevivência. Como solução, vai-se optar pela divisão da aeronave em dois ou três componentes
para facilitar o transporte (figura 3.11).

62
Fig.3.11 Divisão em componentes para fácil transporte

63
3.3 – Dimensionamento
3.3.1 – Estimativa do peso máximo à descolagem
Antes de começar o cálculo para a determinação do peso máximo à descolagem, convém
salientar as decisões e valores assumidos.
8.0
02.0
82.0
0
=
=
=
e
C
lbW
D
payload
Tipicamente o peso da aviónica é incluído no peso da aeronave vazia We, mas é aconselhável
reservar algum peso adicional payloadW para prever futuras evoluções ou simplesmente para
corrigir algumas discrepâncias que possam surgir, visto que estamos a desenvolver uma aeronave
em miniatura com métodos típicos de aeronaves de tamanho real.
Selecção da geometria da asa (com ajuda das figuras 2.4 e 2.5 e anexo III):
º2
0
6.0
6
4/
=Γ
=Λ
=
=
c
A
λ
63012NACAAerofólio (anexo V)
Selecção da geometria do plano horizontal da empenagem (com ajuda das figuras 2.4 e 2.5 e
anexo IV):
º0
º10
6.0
4
4/
=Γ
=Λ
=
=
c
A
λ
0009NACAAerofólio (Anexo VI)
Selecção da geometria do plano vertical da empenagem (com ajuda das figuras 2.4 e 2.5 e anexo
IV):

64
º10
6.0
6.1
4/ =Λ
=
=
c
A
λ
0009NACAAerofólio (anexo VI)
O valor para a relação peso/potência W/hp é o mesmo que foi assumido anteriormente, quando se
fez a comparação das aeronaves existentes da mesma categoria.
6/ =hpW
Na determinação do valor da carga alar W/S, é preciso conhecer o maxLC da asa e stallV . O valor de
maxLC corresponde a 90% do maxlC do aerofólio. Do anexo VI, sabe-se que maxlC do aerofólio
NACA 63012 é ~1.4 (deixando uma margem de segurança). Isto dá um maxLC de 1.26 e o valor de
W/S fica a depender unicamente da velocidade stallV . Para evitar a escolha ao acaso da velocidade
stallV , um rápido estudo é realizado para ver como é que algumas características variam com a
mesma.
0
2
4
6
8
10
12
0 5 10 15 20 25 30
Vstall (kts)
Wo (lbs)
b (ft)
W/S (lbs/ft2)
Fig.3.12 Variação de W/S, Wo e b com a velocidade de stall

65
Da figura 3.12, percebe-se que o peso máximo à descolagem Wo e envergadura de asa b
diminuem com o aumento de stallV . Mas uma maior velocidade de “stall” vai implicar uma maior
energia cinética na operação de aterragem em “deep-stall” e um maior risco de danos da
aeronave. Então o mais justo será assumir o mesmo valor de W/S que os Mini-UAV’s vistos
anteriormente (figura 3.3) porque estas aeronaves executam aterragens em “deep-stall”. Isto
conduz-nos a um valor de W/S de próximo de 1.6 que corresponde a uma stallV de 19.4 nós.
2
max
/607.1/
4.19
26.1
ftlbSW
ktsV
C
stall
L
=
=
=
Procedendo ao cálculo e iterações, chegamos a:
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Wo (lb)
Wo (lb)
Wo Calculado
Wo Assumido
Fig.3.13 Determinação do peso máximo à descolagem
Pela figura 3.13, conseguimos ver que o peso máximo à descolagem óptimo ocorre quando Wo é
de 8.58 lb.

66
Com o peso máximo à descolagem encontrado, pode-se determinar as características da aeronave.
ftb
ftS
lbW
lbWf
lbWe
lbWo
ref
payload
66.5
34.5
82.0
48.0
27.7
58.8
2
=
=
=
=
=
=
Para se manter a relação de W/hp assumida, a potência necessária para tal é de pelo menos 1.42 hp.
E procurando um motor de aeromodelismo que tenha tal potência e que seja de peso reduzido,
encontra-se o motor da figura 3.14.
Fig.3.14 Características do motor escolhido para aeronave [16]
O motor escolhido apresenta um pouco mais de potência do que é necessário (1.5 hp), mas
considerando que é o que tem potência mais próxima do pretendido e de peso reduzido, torna-o o
mais indicado.
Além disto, o motor apresenta um consumo específico muito diferente ao assumido pelas
expressões de cálculo usadas. Este tipo de motores apresenta um consumo específico muito
elevado porque tem que produzir muita potência para o seu tamanho.

67
Como se sabe que este motor consome 0.5 onças fluidas/min (0.0148 litros/min), é de esperar
que em 47 minutos (tempo típico de realização da missão estabelecida mais alguma tolerância)
consuma 0.7 litros, equivalente a 1.24 lb de combustível. Estabelecendo a devida correcção,
temos:
ftb
ftS
lbWf
lbWe
lbWo
ref
66.5
34.5
24.1
27.7
58.8
2
=
=
=
=
=

68
3.3.2 – Dimensionamento das proporções geométricas
Agora que se sabe o valor de Wo, pode-se facilmente determinar as proporções geométricas da
aeronave.
Fuselagem
Comprimento da fuselagem: ftL 46.4=
Diâmetro máximo da fuselagem: ftD 35.0=
Asa
Área alar: 234.5 ftS =
Alongamento: 6=A
Relação de estreitamento: 6.0=λ
Relação espessura/corda do aerofólio: 12.0/ =ct
Ângulo da linha a 25% da corda: º04/ =Λ c
Ângulo de diedro: º2=Γ
Envergadura: ftb 66.5=
Comprimento da corda na raiz: ftcroot 18.1=
Comprimento da corda na ponta: ftctip 71.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 96.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 27.1=
Ângulo do bordo de ataque: º4.2=ΛLE
Plano horizontal da empenagem
Área alar: 292.0 ftS =
Posição do plano horizontal da empenagem: ftLHT 8.2=
Alongamento: 4=A
Relação de estreitamento: 6.0=λ
Relação espessura/corda do aerofólio: 09.0/ =ct
Ângulo da linha a 25% da corda: º104/ =Λ c
Ângulo de diedro: º0=Γ

69
Envergadura: ftb 92.1=
Comprimento da corda na raiz: ftcroot 6.0=
Comprimento da corda na ponta: ftctip 36.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 49.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 44.0=
Ângulo do bordo de ataque: º4.13=Λ LE
Plano vertical da empenagem
Área alar: 243.0 ftS =
Posição do plano vertical da empenagem: ftLVT 8.2=
Alongamento: 6.1=A
Relação de estreitamento: 6.0=λ
Relação espessura/corda do aerofólio: 09.0/ =ct
Ângulo da linha a 25% da corda: º104/ =Λ c
Envergadura: ftb 83.0=
Comprimento da corda na raiz: ftcroot 65.0=
Comprimento da corda na ponta: ftctip 39.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 53.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 19.0=
Ângulo do bordo de ataque: º4.18=Λ LE
Motores
Nº de motores: 1 (a quatro tempos)
Potência: 1.5 bhp
Regime do motor: rpsrpmn 20012000 ==
Nº de pás por hélice: 2
Diâmetro da hélice: inftd 121 ==
Peso do motor: 1 lb

70
Calculadas as dimensões da aeronave, procede-se ao desenho da mesma (desenho I) para se
determinar as áreas “molhadas” (áreas em contacto com o fluxo de ar), indispensáveis para a
análise aerodinâmica.
71
3.3.3 – Análise aerodinâmica
Com base nos resultados obtidos nas fases anteriores e no desenho realizado, agora prossegue-se
a análise aerodinâmica com os métodos demonstrados anteriormente.
Áreas
Para começar, determinam-se as áreas expostas:
Asa : 293.9 ftSwet =
Plano horizontal da empenagem : 286.1 ftSwet =
Plano vertical da empenagem : 287.0 ftSwet =
Fuselagem : 278.3 ftSwet =
Área total exposta : 23.25 ftSwet =
Relação área exposta/área alar : 272.4/ ftSS refwet =
Uma rápida comparação de relações de áreas pode ser feita com ajuda da figura 3.15, permite
concluir que a relação área exposta/área alar encontra-se próxima dos valores que uma
configuração semelhante apresenta.

72
Fig.3.15 Relações de áreas expostas [8]
Sustentação
Prosseguindo para a análise das características de sustentação das asas, obtêm-se as seguintes
curvas características:
Asa : 182.4 −= radClα
Plano horizontal da empenagem : 11.4 −= radCl hα
Plano vertical da empenagem : 137.2 −= radCl vα
Factor de sustentação da fuselagem: 2.1=F
Para a asa com a geometria obtida, a sustentação máxima limpa (sem auxilio de dispositivos de
sustentação ou “flaps”) é de 1.26 a um ângulo de ataque de 12.78º.

73
Arrasto parasita e arrasto induzido para sustentação
Estudando cada componente para as condições dominantes da missão (condição de voo
cruzeiro), consegue-se obter:
Arrasto parasita : 0250.00 =DC
Factor de arrasto induzido para sustentação : 061.0=K
Factor de eficiência de Oswald : 869.0=e
Resultados
CL vs αααα
-0,60
-0,40
-0,20
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
-10 -5 0 5 10 15
αααα((((graus))))
CL
Fig.3.16 Variação do coeficiente de sustentação com o ângulo de ataque

74
CD vs αααα
-10
-5
0
5
10
15
0,000 0,020 0,040 0,060 0,080 0,100
CD
α α α α ((((graus))))
Fig.3.17 Variação do coeficiente de arrasto com o ângulo de ataque
CL vs CD
-0,50
0,00
0,50
1,00
1,50
0,000 0,020 0,040 0,060 0,080 0,100
CD
CL
Fig.3.18 Curva polar de arrasto vs sustentação

75
0,014
0,003
0,002
0,001
0,0019
0,000
0%
20%
40%
60%
80%
100%
Nacelles
Outros
Emp. vrt.
Emp. horiz.
Fuselagem
Asa
Fig.3.19 Fracções do arrasto parasita
Os resultados apresentados nas figuras 3.16, 3.17, 3.18 e 3.19 demonstram uma concordância
com o que previa a teoria. A curva de sustentação apresenta-se 10% inferior à curva de
sustentação do aerofólio 2D, o coeficiente de arrasto é muito inferior ao coeficiente de
sustentação para a mesma atitude e nas fracções de arrasto pode-se ver que a asa contribui com
65% do arrasto parasita porque a fuselagem apenas possui tamanho suficiente para abrigar os
dispositivos electrónicos.

76
3.3.4 – Estimativa de pesos
Com o método estatístico de determinação de pesos apresentado anteriormente, consegue-se
estimar os pesos de cada componente e no final somá-los e comparar o peso total com o peso
máximo à descolagem calculado.
Então tem-se:
lbWwing 25.1=
lbWht 09.0=
lbWvt 082.0=
lbW fuselage 55.0=
lbW engineinstalled 58.2=
lbW systemfuel 29.0=
lbW controlsflight 018.0=
lbWhydraulics 0086.0=
lbWavionics 1=

77
Fig.3.20 Distribuição de pesos da célula
Fig.3.21 Distribuição de pesos da aeronave
Estes resultados vão conduzir a um peso vazio lbWe 86.5= e um peso máximo à descolagem
lbWo 17.7= . Comparando com os valores obtidos ( lbWe 27.7= e lbWo 58.8= ), percebe-se
facilmente que este método está a dar valores abaixo dos que foram obtidos anteriormente.

78
Isto seria o ideal, mas este método é estatístico e baseado em aeronaves de tamanho real e não em
aeronaves de tamanho reduzido. Então procedeu-se a um ajuste de pesos, tendo em consideração
os aspectos de um veículo de tamanho reduzido, o equipamento associado e também das
percentagens do método anterior.
lbWwing 7.1=
lbWht 55.0=
lbWvt 55.0=
lbW fuselage 75.1=
lbW engineinstalled 1=
lbW controlsflight 5.0=
lbWavionics 1=
Fig.3.22 Distribuição de pesos da célula

79
Fig.3.23 Distribuição de pesos da aeronave
E com este ajuste consegue-se ter um peso vazio de lbWe 05.7= e um peso máximo à
descolagem lbWo 52.8= . Esta estimativa é bem mais próxima dos valores calculados e parecem
mais concisos para este tipo de aeronave.

80
3.3.5 – Análise de desempenho e propulsão
Agora vai ser analisada a propulsão e o desempenho da aeronave para ver como é que se comporta
nas condições de voo ao nível do mar e ao nível de voo cruzeiro.
Nos cálculos das correcções da propulsão foi considerada uma hélice de duas pás baseada nos
dados da figura 2.8.2 porque o fabricante do motor apenas disponibiliza os tamanhos de hélices
opcionais e não as suas características. Apesar desta discrepância, consegue-se obter resultados
aceitáveis.
Desempenho em voo nivelado
A figura 3.3.5.1 mostra a variação da força de impulsão e arrasto com a velocidade para as
condições de voo descritas acima.
Fig.3.24 Variação da impulsão e arrasto com a velocidade

81
Analisando a figura 3.24, consegue-se ver que existe força de impulsão estática (quando a
velocidade é nula) suficiente para permitir uma descolagem por lançamento manual sem
dificuldades como também se verifica que em condições de voo cruzeiro existe uma força de
impulsão relativamente superior a força de arrasto. Isto podia significar que estaríamos a suar
potência a mais do que era necessário, mas por um lado, esta potência é mesmo necessária para
realizar a descolagem por lançamento manual e, por outro lado, permite aumentar o raio de acção
porque não é preciso usar a potência total do motor para realizar o voo cruzeiro. Além destes
detalhes, convém salientar que a velocidade limite acontece a 94 nós.
Desempenho em voo ascendente
Relativamente ao desempenho em voo ascendente, conseguem-se os resultados representados na
figura 3.25.
Fig.3.25 Razão de subida
Observando o diagrama da razão de subida, vê-se que a melhor razão de subida acontece a 48
nós com uma velocidade vertical de 3600 pés por minuto ao nível do mar e a 3480 pés por
minuto a 1000 pés de altitude. O melhor ângulo de subida é de 49.8º e ocorre a 20 nós com uma
velocidade vertical de 2400 pés por minuto para ambos níveis de voo (recta tangente às curvas e
que passa na origem).

82
3.3.6 – Optimização
Agora que já se tem uma base sólida daquilo que pode vir a ser a solução final, prossegue-se à
optimização das características das asas porque não existe grande interesse em reduzir
drasticamente o peso máximo à descolagem porque o valor calculado parece estar próximo do
valor óptimo para a solução. Então opta-se pela optimização alongamento e carga alar, fazendo
variar o alongamento 33% e a carga alar 20%. Esta optimização vai dar origem a uma matriz 3X3,
onde cada célula corresponde a uma aeronave e sendo a nº5 a aeronave de referência.
A figura 3.26 representa a matriz optimização em questão.
Fig.3.26 Matriz optimização A vs W/S
E para esta optimização obtêm-se os seguintes resultados, com os valores de velocidade máxima a
serem obtidas para a altitude de voo cruzeiro e as razões de subida ao nível do mar à velocidade
cruzeiro.
Fig.3.27 Resultados da matriz optimização A vs W/S

83
Com os resultados da matriz optimização alongamento versus carga alar, traça-se o gráfico de
optimização com as seguintes condições de fronteira assumidas:
Envergadura máxima: ftb 5.6=
Razão máxima de subida: min/3500 ftVv =
Razão mínima de subida: min/3000 ftVv =
Velocidade máxima: ktsV 90max =
Fig.3.28 Gráfico da optimização A vs W/S
A figura 3.28 ilustra o gráfico da optimização com as condições fronteira e a aeronave mais
indicada para as condições assumidas e com o peso máximo à descolagem próximo do calculado
surge com alongamento de 7 e uma carga alar de 1.66 2/ ftlb (ponto preto no gráfico).
Agora que a aeronave optimizada foi encontrada, prossegue-se a um redimensionamento
detalhado e a um estudo completo.

84
3.3.7 – Estimativa do peso máximo à descolagem e dimensionamento das proporções
geométricas da aeronave final
Após ter sido realizada a optimização e de se ter encontrado os valores óptimos para o
alongamento e a carga alar, foi feita uma breve análise de estabilidade para se certificar de que os
pesos se encontravam bem ajustados. Para se garantir que a aeronave é estável, o comprimento da
fuselagem e o volume do plano vertical da empenagem tiveram de sofrer um ligeiro aumento
como demonstra a figura 3.29.
Fig.3.29 Incremento de área
Valores assumidos
Selecção da geometria da asa (com ajuda das figuras 2.4 e 2.5 e anexo III):
º2
0
6.0
7
4/
=Γ
=Λ
=
=
c
A
λ
63012NACAAerofólio (anexo V)
Selecção da geometria do plano horizontal da empenagem (com ajuda das figuras 2.4 e 2.5 e
anexo IV):

85
º0
º10
6.0
4
4/
=Γ
=Λ
=
=
c
A
λ
0009NACAAerofólio (Anexo VI)
Selecção da geometria do plano vertical da empenagem (com ajuda das figuras 2.4 e 2.5 e anexo
IV):
º7
7.0
7.1
4/ =Λ
=
=
c
A
λ
0009NACAAerofólio (anexo VI)
Para o valor da relação peso/potência W/hp considera-se um novo valor baseado na potência do
motor escolhido e no peso máximo à descolagem assumido.
9.5/ =hpW
Procedendo ao cálculo do peso máximo à descolagem para as novas condições, chega-se a:
ftb
ftS
lbWf
lbWe
lbWo
ref
98.5
11.5
24.1
26.7
48.8
2
=
=
=
=
=
Agora que se determinou o valor de Wo, calculam-se as proporções geométricas da aeronave.
Fuselagem
Comprimento da fuselagem: ftL 61.4=
Diâmetro máximo da fuselagem: ftD 35.0=

86
Asa
Área alar: 211.5 ftS =
Alongamento: 7=A
Relação de estreitamento: 6.0=λ
Relação espessura/corda do aerofólio: 12.0/ =ct
Ângulo da linha a 25% da corda: º04/ =Λ c
Ângulo de diedro: º2=Γ
Envergadura: ftb 98.5=
Comprimento da corda na raiz: ftcroot 07.1=
Comprimento da corda na ponta: ftctip 64.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 87.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 37.1=
Ângulo do bordo de ataque: º2=Λ LE
Plano horizontal da empenagem
Área alar: 28.0 ftS =
Posição do plano horizontal da empenagem: ftLHT 8.2=
Alongamento: 4=A
Relação de estreitamento: 6.0=λ
Relação espessura/corda do aerofólio: 09.0/ =ct
Ângulo da linha a 25% da corda: º104/ =Λ c
Ângulo de diedro: º0=Γ
Envergadura: ftb 78.1=
Comprimento da corda na raiz: ftcroot 56.0=
Comprimento da corda na ponta: ftctip 33.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 45.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 41.0=
Ângulo do bordo de ataque: º4.13=Λ LE

87
Plano vertical da empenagem
Área alar: 249.0 ftS =
Posição do plano vertical da empenagem: ftLVT 8.2=
Alongamento: 7.1=A
Relação de estreitamento: 7.0=λ
Relação espessura/corda do aerofólio: 09.0/ =ct
Ângulo da linha a 25% da corda: º74/ =Λ c
Envergadura: ftb 91.0=
Comprimento da corda na raiz: ftcroot 63.0=
Comprimento da corda na ponta: ftctip 44.0=
Comprimento da corda no centro aerodinâmico da asa: ftc 54.0=
Distancia do centro aerodinâmico da asa a linha central: ftY 21.0=
Ângulo do bordo de ataque: º8.12=Λ LE
Motores
Nº de motores: 1 (a quatro tempos)
Potência: 1.5 bhp
Regime do motor: rpsrpmn 20012000 ==
Nº de pás por hélice: 2
Diâmetro da hélice: inftd 121 ==
Peso do motor: 1 lb
Em seguida, são apresentadas figuras com a modelação gráfica em 3D do aspecto da aeronave
final (a modelação foi feita em software SolidWorks [17]).

88
Fig.3.30 Vista lateral
Fig.3.31 Vista superior
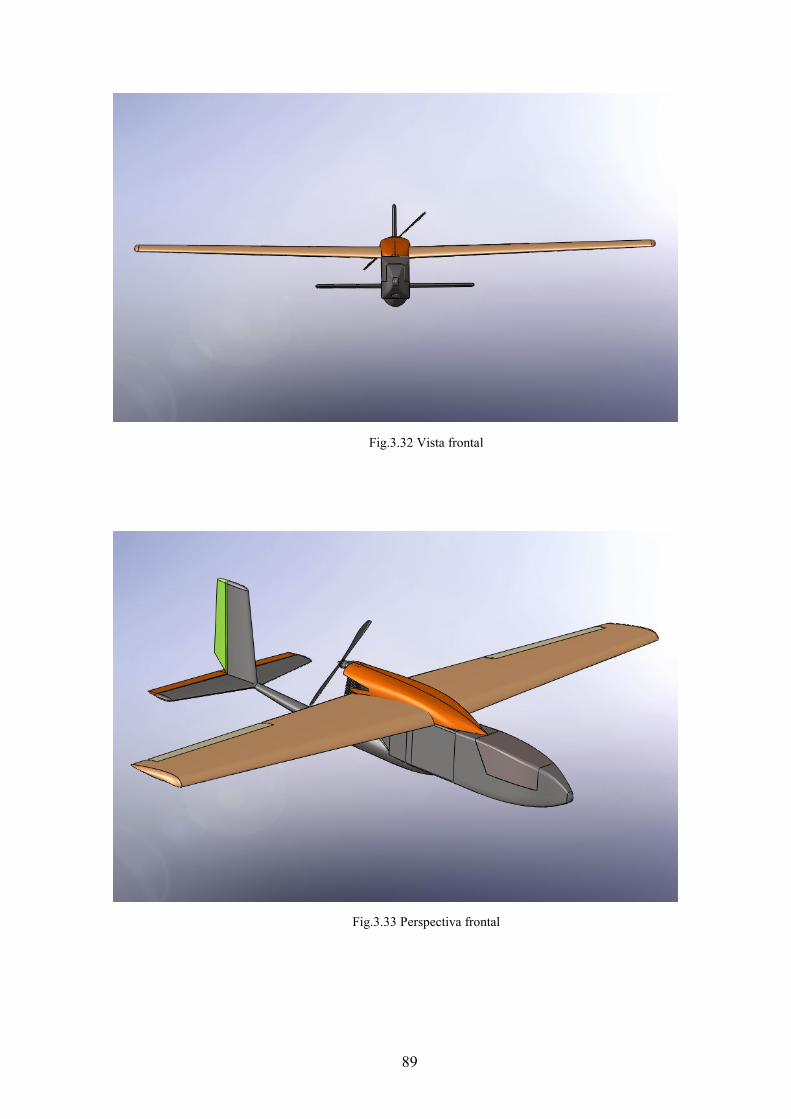
89
Fig.3.32 Vista frontal
Fig.3.33 Perspectiva frontal

90
Fig.3.34 Perspectiva traseira

91
3.3.8 – Análise aerodinâmica da aeronave final
Com base nos resultados obtidos nas fases anteriores e no desenho realizado, prossegue-se a
análise aerodinâmica.
Áreas
Para começar, determinam-se as áreas expostas:
Asa : 246.9 ftSwet =
Plano horizontal da empenagem : 261.1 ftSwet =
Plano vertical da empenagem : 299.0 ftSwet =
Fuselagem : 291.3 ftSwet =
Área total exposta : 242.24 ftSwet =
Relação área exposta/área alar : 278.4/ ftSS refwet =
A nova relação de áreas é seis centésimas superior em relação ao valor anterior, o que é sinónimo
de que o ligeiro incremento de tamanho da aeronave não afectou radicalmente a configuração.
Sustentação
Prosseguindo para a análise das características de sustentação das asas, obtêm-se as seguintes
curvas características:
Asa : 198.4 −= radClα

92
Plano horizontal da empenagem : 11.4 −= radCl hα
Plano vertical da empenagem : 149.2 −= radCl vα
Factor de sustentação da fuselagem: 2.1=F
Para asa com a geometria obtida, a sustentação máxima limpa (sem auxilio de dispositivos de
sustentação ou “flaps”) é de 1.26 a um ângulo de ataque de 12.3º.
Arrasto parasita e arrasto induzido para sustentação
Estudando cada componente para as condições dominantes da missão (condição de voo cruzeiro),
consegue-se obter:
Arrasto parasita : 0302.00 =DC
Nota-se que o arrasto parasita sofreu um aumento de 17.2% em relação ao valor anterior. Tal
justifica-se pelo facto de ter havido um acréscimo nas componentes que não provocam
sustentação.
Factor de arrasto induzido para sustentação : 054.0=K
Factor de eficiência de Oswald : 84.0=e

93
Resultados
CL vs αααα
-0,60
-0,40
-0,20
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
-10 -5 0 5 10 15
αααα((((graus))))
CL
Fig.3.35 Variação do coeficiente de sustentação com o ângulo de ataque
CD vs αααα
-10
-5
0
5
10
15
0,000 0,020 0,040 0,060 0,080 0,100 0,120
CD
α α α α ((((graus))))
Fig.3.36 Variação do coeficiente de arrasto com o ângulo de ataque

94
CL vs CD
-0,50
0,00
0,50
1,00
1,50
0,000 0,020 0,040 0,060 0,080 0,100 0,120
CD
CL
Fig.3.37 Curva polar de arrasto vs sustentação
0,019
0,003
0,002
0,001
0,0020
0,000
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Nacelles
Outros
Emp.vrt.
Emp.horiz.
Fuselagem
Asa
Fig.3.38 Fracções do arrasto parasita

95
Os resultados apresentados nas figuras 3.35, 3.36, 3.37 e 3.38 demonstram uma concordância
com o que previa a teoria. A curva de sustentação apresenta-se 10% inferior à curva de
sustentação do aerofólio 2D, o coeficiente de arrasto é muito inferior ao coeficiente de
sustentação para a mesma atitude e nas fracções de arrasto pode-se ver que a asa contribui com
70% do arrasto parasita porque a fuselagem apenas possui tamanho suficiente para abrigar os
dispositivos electrónicos.
Em seguida, serão apresentados resultados de simulações efectuadas em CosmosFloWorks
(ferramenta de dinâmica de fluidos do SolidWorks [17]) para duas condições diferentes. A
primeira condição diz respeito ao voo nivelado à velocidade cruzeiro, enquanto que a segunda
condição diz respeito ao voo com uma atitude de 12º à velocidade próxima da velocidade de
perda ( stallV ).
Voo cruzeiro com V=24m/s
Fig.3.39 Linhas de corrente em voo cruzeiro

96
Fig.3.40 Magnitude da velocidade em voo cruzeiro

97
Fig.3.40 Magnitude da velocidade em voo cruzeiro (continuação)
Fig.3.40 Magnitude da velocidade em voo cruzeiro (continuação)

98
Fig.3.41 Distribuição das pressões na superfície
Fig.3.42 Distribuição das pressões

99
Voo com α = 12º e V = 1.1Vstall
Fig.3.43 Linhas de corrente em voo com º12=α e stallVV 1.1=

100
Fig.3.44 Magnitude da velocidade em voo com º12=α e stallVV 1.1=

101
Fig.3.44 Magnitude da velocidade em voo com º12=α e stallVV 1.1= (continuação)
Fig.3.44 Magnitude da velocidade em voo com º12=α e stallVV 1.1= (continuação)

102
Fig.3.45 Distribuição das pressões
Fig.3.46 Distribuição das pressões (continuação)
As simulações realizadas não tinham como objectivo um estudo aprofundado a nível
aerodinâmico, mas sim uma simples verificação do impacto da configuração da aeronave em
termos aerodinâmicos.
Os resultados das simulações parecem estar de acordo com o que a teoria previa, dando a indicação
de que a configuração actual não tenha nada de anormal, exceptuando alguns detalhes, como por
exemplo: a esteira da asa ser demasiado grande. Tal deve-se às simulações terem sido realizadas
sobre um número limitado de elementos (60 000 elementos) que não asseguraram bons resultados
em certas zonas.

103
3.3.9 – Estimativa de pesos para a aeronave final
Com o método estatístico de determinação de pesos apresentado anteriormente, consegue-se
estimar os pesos de cada componente e no final somá-los e comparar o peso total com o peso
máximo à descolagem calculado.
Então tem-se:
lbWwing 32.1=
lbWht 08.0=
lbWvt 09.0=
lbW fuselage 56.0=
lbW engineinstalled 57.2=
lbW systemfuel 25.0=
lbW controlsflight 019.0=
lbWhydraulics 0085.0=
lbWavionics 1=

104
Fig.3.47 Distribuição de pesos da célula
Fig.3.48 Distribuição de pesos da aeronave

105
Estes resultados vão conduzir a um peso vazio lbWe 91.5= e um peso máximo à descolagem
lbWo 16.7= . Comparando com os valores obtidos ( lbWe 26.7= e lbWo 48.8= ), vê-se que este
método está novamente a dar valores abaixo daqueles que foram calculados. Como tal, vai-se
ajustar os pesos como foi feito anteriormente.
lbWwing 77.1=
lbWht 42.0=
lbWvt 42.0=
lbW fuselage 83.1=
lbW engineinstalled 1=
lbW controlsflight 78.0=
lbWavionics 1=
Fig.3.49 Distribuição de pesos da célula

106
Fig.3.50 Distribuição de pesos da aeronave
E com este método consegue-se ter um peso vazio de lbWe 22.7= e um peso máximo à
descolagem lbWo 46.8= . Esta estimativa é bem mais próxima dos valores calculados e parecem
mais concisos para este tipo de aeronave.
É de salientar que peso restante da carga a transportar (assumido inicialmente como
lbWpayload 82.0= e que depois parte foi convertida para peso de combustível) foi incluída no peso
da estrutura.
Os pesos vão-se localizar ao longo do comprimento da aeronave em estações que se encontram a
uma certa distância da estação de referência, sendo a estação de referência o nariz da aeronave. A
figura 3.50 mostra a posição de diferentes estações.
Fig.3.50 Estações

107
Com a estação de referência assumida, a localização dos pesos segue a seguinte forma:
Tabela.I Ajustes e balanço dos pesos
Pela tabela I, percebe-se que o centro de gravidade está na estação 20.6 polegadas quando a
aeronave se encontra totalmente carregada. Como o peso da carga a transportar foi incluída na
estrutura, a única componente que varia é o peso do combustível e o centro de gravidade quando
a aeronave se encontra seca está a 21.05 polegadas. Tal vai resultar numa variação do centro de
gravidade linear como mostra a figura 3.51.
Fig.3.51 Variação do centro de gravidade

108
3.3.10 – Estabilidade
Com os pesos definidos e as localizações dos centros de gravidade determinados, segue-se uma
análise de estabilidade para dimensionar as superfícies de controlo e certificar de que tudo se
encontra em ordem.
Então temos as seguintes posições do centro de gravidade:
- centro de gravidade mais adiante - ingXc 60.20.. = ;
- centro de gravidade mais afastado - ingXc 05.21.. = ;
Estabilidade longitudinal
Para a estabilidade longitudinal, considera-se o valor do centro de gravidade mais afastado como a
condição mais crítica e prosseguindo ao cálculo, consegue-se obter o ponto neutro de rotação
inX np 31.21= com uma margem estática positiva de 0.083.
Uma margem estática positiva é sinónimo de que a aeronave é estável na condição mais crítica e
conduz a um equilíbrio de momentos em torno do centro de gravidade em situação de variação de
ângulo de ataque 1415.0 −−= radCmα .
Resultados da estabilidade longitudinal:
1415.0
31.21
083.0
−−=
=
=
−
radC
inX
c
XX
m
np
cgnp
α
Analisando os resultados e comparando com os valores da figura 3.52, percebe-se que a aeronave
apresenta uma estabilidade típica da classe da aviação geral e de aviões particulares. Pode-se
concluir que a disposição assumida das componentes que constituem a aeronave não necessitam de
serem reposicionadas para garantir a estabilidade.

109
Fig.3.52 Momento resultante após a variação de ângulo de ataque [8]
Estabilidade longitudinal via deflexão do leme de profundidade
Para este tipo de estabilidade longitudinal, considera-se o valor do centro de gravidade mais
adiante como a condição mais crítica (situação em que o peso está concentrado na frente da
aeronave e é usado o leme de profundidade para estabilizar).
O estudo destas condições implica o conhecimento das proporções do leme de profundidade que
ainda não foi dimensionado. Então, assume-se que a corda média do leme de profundidade
corresponde a 25% da corda local do plano horizontal da empenagem. Assume-se uma corda
média porque o plano horizontal da empenagem apresenta algum ângulo de flecha, pelo que
resultaria num leme de profundidade de dois elementos. Com a finalidade de simplificar, opta-se
por um leme de profundidade de único elemento (necessitando apenas de um servo para o
controlo) que ocupa 85% da extensão do plano horizontal da empenagem (efectivamente ocupa a
totalidade da extensão mas considera-se uma perda de eficiência devido à interferência com o
plano vertical da empenagem). A figura 3.53 mostra a geometria assumida para o leme de
profundidade.

110
Fig.3.53 Empenagem e superfícies de controlo
Com as medidas do leme de profundidade assumidas, prossegue-se ao cálculo dos momentos em
torno do centro de gravidade para diferentes ângulos de deflexão do leme de profundidade e com
os resultados traça-se o gráfico de equilíbrio (figura 3.54).
-0,30
-0,20
-0,10
0,00
0,10
0,20
0,30
0,40
0,50
-0,2 -0,1 0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
CLTotal
Cmgde= 0º
de= -2º
de= -4º
de= -6º
Ajuste em voo cruzeiro
Fig.3.54 Gráfico do equilíbrio
Na condição de voo cruzeiro, a aeronave apresenta um coeficiente de sustentação de 0.3 e, para
que haja equilíbrio, é necessário que a resultante dos momentos em torno do centro de gravidade
seja nula (ponto negro no gráfico). Isto implica que a deflexão do leme de profundidade necessária
para a condição mais crítica é de -1.1º, que contribui para um acréscimo de arrasto parasita
00004.00 =DC .

111
Estabilidade lateral
Para a estabilidade lateral é considerada a condição crítica em que a aeronave está a voar com
um ângulo de deslize º5.11=β a uma velocidade 10% superior à velocidade de perda ( stallV )
com os “ailerons” a produzirem uma certa rotação e arrasto.
Nesta parte, o foco do estudo vai estar centrado no dimensionamento do leme direccional
(superfície de controlo do plano vertical da empenagem) e visto que ainda restam dois tipos de
superfície de controlo a dimensionar (leme direccional e os “ailerons”), admitem-se em primeiro
lugar as dimensões dos “ailerons” para análise de estabilidade e depois o leme direccional será
dimensionado com vista a capacidade de controlo.
A escolha das proporções dos “ailerons” pode-se basear na informação da figura 3.55 que mostra
as dimensões típicas destas superfícies de controlo.
Fig.3.55 Tendências das proporções dos “ailerons” [8]
Optando por uma medida de comprimento com 45% da envergadura da asa e uma corda com
20% do valor da corda local da asa, os “ailerons” ficam dimensionados e procedendo ao cálculo
consegue-se um momento resultante de guinada para esta condição 10499.0 −= radCnβ .
Uma rápida análise à figura 3.56 permite concluir que o valor calculado encontra-se mesmo na
faixa de valores óptimos.

112
Fig.3.56 Valores para o momento de guinada [8]
Quanto à capacidade de controlo (capacidade do leme direccional exercer força suficiente para
contrabalançar a situação desfavorável), é solicitada uma deflexão máxima do leme direccional Rδ
de 20º para equilibrar a aeronave. Esta condição é imposta com este limite porque tem que restar
espaço de manobra para o leme de direcção poder gerar controlo além do equilíbrio mas, este
limite surge como uma medida de segurança para aeronaves tripuladas. Nos UAV’s, por serem não
tripulados, pode-se ignorar este limite desde que se garanta algum espaço para controlo para o
leme além do equilíbrio, pois garantir os tais 20º implica um aumento considerável da área do
plano vertical da empenagem.
Sendo assim, assume-se que o leme de direcção tem uma corda com 35% do valor local da corda
do plano vertical da empenagem e um comprimento com 90% da extensão do plano vertical da
empenagem (a superfície de controlo tem que deixar espaço para o leme de profundidade operar
livremente – figura 3.53). Estas proporções do leme direccional vão implicar uma deflexão de
29.3º para que exista equilíbrio na situação crítica considerada.

113
3.3.11 – Análise de desempenho e propulsão da aeronave final
Anteriormente foi feita uma breve análise de desempenho e propulsão porque ainda estava em
vista o processo de optimização e provavelmente a aeronave em questão não seria a ideal, logo
não tinha significado realizar uma análise completa.
Agora será apresentada uma análise mais detalhada de alguns aspectos importantes do
desempenho.
Desempenho em voo nivelado
Começando com o estudo da força de impulsão e arrasto para as condições de voo cruzeiro e ao
nível do mar, conseguem-se os resultados exibidos na figura 3.57.
Fig.3.57 Variação da impulsão e arrasto com a velocidade
Os resultados são idênticos aos valores obtidos anteriormente, denotando-se uma força de
impulsão suficiente para um lançamento manual em segurança e que a velocidade máxima
encontra-se a 90 nós como o esperado (um dos requisitos da optimização). De salientar que as
curvas de força de impulsão estão sob a condição de potência máxima do motor e dado que

114
existe uma diferença considerável entre a força de impulsão e a força de arrasto na situação de voo
cruzeiro (7.8 lb de força de impulsão contra 0.8 lb de força de arrasto), é melhor verificar a força
exigida para um voo cruzeiro uniforme.
A figura 3.58 mostra a variação da força de impulsão máxima e a força de impulsão exigida
(impulsão mais próxima da ideal para se estabelecer um voo uniforme).
0,00
2,00
4,00
6,00
8,00
10,00
12,00
0 10 20 30 40 50 60 70 80 90 100V (kts)
Tou D
(lb)Arrasto Total
Impulsão Máxima
Impulsão Exigida
Fig.3.58 Variação do arrasto, impulsão máxima e exigida com a velocidade
A força de impulsão exigida encontra-se consideravelmente abaixo da força de impulsão máxima,
cerca de 15% da força de impulsão máxima. Ou seja, não há necessidade de efectuar o voo
cruzeiro em potência máxima, aumentando a capacidade do raio de acção e “endurance” como
também possibilita uma aproximação ao alvo mais silenciosa.
Ainda para a situação de voo cruzeiro (altitude a 1000 pés), pode-se verificar como é que a
aeronave se comporta a nível de arrasto e ângulo de ataque. A figura 3.59 mostra a variação do
arrasto induzido para sustentação, do arrasto parasita e o somatório das duas. Consegue-se
perceber que o efeito do arrasto induzido para sustentação é mais crítico a baixas velocidades,
enquanto que o arrasto parasita tem um efeito oposto e o arrasto mínimo acontece quando a
velocidade é de 24 nós (onde a relação L/D é máxima).

115
A variação de ângulo de ataque com a velocidade ou o ângulo de ataque necessário para se
manter a sustentação necessária, é apresentada na figura 3.60 e para a velocidade de cruzeiro é
necessário um ângulo de ataque de 0.75 graus. Isto significa que não há necessidade de alterar o
ângulo de incidência da asa para se estabelecer o mínimo arrasto criado pela fuselagem e outros
componentes.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0 10 20 30 40 50 60 70 80 90 100V (kts)
D (lb)
Arrasto Induzido
Arrasto Parasita
Arrasto Total
Fig.3.59 Contribuição do arrasto parasita e arrasto induzido para sustentação para o arrasto total
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
0 10 20 30 40 50 60 70 80 90 100
V (kts)
αααα(graus)
Fig.3.60 Variação do ângulo de ataque com a velocidade

116
A impulsão mínima para o voo nivelado é a situação em que a aeronave voa com uma relação L/D
máxima com o mínimo arrasto associado e pode ser traduzida nas seguintes condições:
ktsV drag 26min =
75.0min =dragLC
lbD drag 69.0min =
Quanto à optimização do raio de acção (normalmente realizada com ajuda da expressão 2.64), não
tem grande relevância porque a expressão varia na função inversa do consumo específico dos
motores da aviação geral, que são muito inferiores quando comparados com os motores de
aeromodelos. A sua utilização com os dados destes motores à escala conduz a resultados
completamente irreais.
Mas como não vai ser necessária a utilização de toda a potência disponível para realizar o voo
nivelado, o raio de acção assumido inicialmente deverá ser cumprido sem problemas.
Desempenho em voo ascendente e descendente
O desempenho em voo ascendente pode ser avaliado com base nos resultados representados na
figura 3.61.
Fig.3.61 Razão de subida

117
Observando o diagrama da razão de subida, vê-se que a melhor razão de subida acontece a 46
nós com uma velocidade vertical de 3520 pés por minuto ao nível do mar e a 48 nós com uma
velocidade vertical de 3400 pés por minuto a 1000 pés de altitude. O melhor ângulo de subida é
de 49º e ocorre a 20 nós com uma velocidade vertical de 2400 pés por minuto ao nível do mar e
2340 pés por minuto a 1000 pés de altitude. E o tempo mínimo de subida desde o nível do mar
até 1000 pés de altitude é de 17 segundos, como demonstram os resultados da tabela II.
Tabela.II Duração da subida
O desempenho do voo descendente ou voo planado pode ser expresso sob a forma da figura
3.3.62, em que é assumido que o voo planado inicia-se a altitude cruzeiro com o peso no
momento final da subida (peso máximo à descolagem menos o peso de combustível consumido
na subida).

118
0,0
20,0
40,0
60,0
80,0
100,0
120,0
0 20 40 60 80 100 120V (kts)
Vv
(ft/s)
Fig.3.62 Razão de descida
O voo planado minimizando a razão de descida acontece quando a velocidade é de 19.74 nós com
uma velocidade vertical descendente de 138 pés por minuto.
ktsV k 74.19sinmin =
29.1sinmin =kLC
35.5/ sinmin =kDL
O voo planado maximizando o alcance implica que a aeronave voe com a relação L/D máxima e
acontece quando a velocidade é de 26 nós cm uma velocidade vertical descendente de 165 pés por
minuto.
ktsV DL 26/max =
75.0/max =DLLC
36.12/ max =DL
O alcance máximo em voo planado é de 2.03 milhas náuticas a um ângulo mínimo de descida de
4.6 graus.

119
3.3.12 – Análise de estruturas
Antes de iniciar a análise de estruturas, é melhor definir as partes do conjunto que vão ser
independentes de modo a facilitar o transporte e também para facilitar o estudo estrutural.
Na figura 3.11 foram apresentas duas soluções para o conjunto, uma que era composta pela
fuselagem e a asa (duas partes) e outra que era composta pela fuselagem e a asa separada em dois
(três partes).
Nesta altura, a melhor solução recai na que apresenta três partes porque já sabemos que
dimensões terá cada componente e a repartição em várias partes compensa na mobilização da
equipa que terá de transportar a aeronave. Então cada asa (asa direita e asa esquerda) e a
fuselagem serão partes independentes que depois serão unidas por intermédio de uma peça
fundamental que suportará os esforços principais de modo a aliviar os esforços sobre a
fuselagem.
Para estudar estas componentes, é necessário determinar em que condições a aeronave encontrará
os esforços críticos. Para tal, vamos recorrer ao diagrama V-n em função das características desta
aeronave.
Fig.3.63 Diagrama V-n

120
Pelo diagrama V-n exposto acima, percebe-se imediatamente que a condição sobre efeitos de
rajada intensa têm que ser ignorados porque as linhas a traço interrompido (sinónimo da
velocidade das rajadas de vento) intersectar-se-iam com as velocidades de serviço em factores de
carga extremamente elevados. Como havia sido referido, esta aeronave tem o objectivo de servir
missões de reconhecimento em boas condições atmosféricas.
Continuando com a análise do digrama V-n, encontramos quatro velocidades de serviço: stallV
(velocidade de perda), CV (velocidade cruzeiro), BV (velocidade crítica de manobra) e DV
(velocidade de mergulho). As velocidades stallV e CV são dependentes das características da
aeronave, enquanto que as outras duas são assumidas como limites máximos.
No caso da velocidade BV , é assumida como a situação em que a aeronave voa em factor de carga
máximo (condição limite para os esforços nas superfícies de controlo). Esta velocidade foi
assumida com um valor próximo da velocidade de cruzeiro porque esta aeronave não estará
concebida para grandes manobras ou voos a grande velocidade (as missões de vigilância ou
reconhecimento são efectuadas a velocidades baixas).
Como não há grande interesse que o aparelho voe a velocidades altas, a velocidade de mergulho
DV foi assumida como a velocidade máxima que a aeronave consegue voar em voo nivelado (já
demonstrado anteriormente), embora as características da aeronave permitam uma velocidade
terminal de mergulho de 130 nós!
Resumindo, o estudo estrutural vai incidir na condição de voo BV sob o factor de carga limite.

121
Estudo estrutural das baoinetas
As baionetas são os elementos que vão unir as asas, motor e a fuselagem. O motor será ligado por
meio de ligação aparafusada, as asas serão encaixadas e presas com ajuda de elásticos e a
fuselagem será colada às baionetas. Sendo estas, o elo de ligação entre estas componentes, é de
esperar que sofra os esforços mais intensos e por isso esta componente será fabricada em
alumínio 2024 ( MPacy 8.75=σ , GPaE 5.74= , MPar 90=σ , 3/67.2795 mkg=ρ ).
Efectuando o estudo estrutural, consegue-se chegar à seguinte geometria com os seguintes
resultados de tensões e deslocamentos (a analise estrutural foi realizada no CosmosWorks
(programa de elementos finitos do SolidWorks [17]).
Fig.3.64 Distribuição das tensões nas baionetas

122
Fig.3.65 Deslocamentos nas baionetas
Analisando as figuras acima, pode-se ver que a geometria proposta não apresenta problemas face
aos esforços sofridos.
Em última análise ao corpo, pode-se sugerir a adição de um pequeno elemento de protecção
também em alumínio (figura 3.66) para protecção do motor em caso de acidente.
Fig.3.66 Elemento de protecção
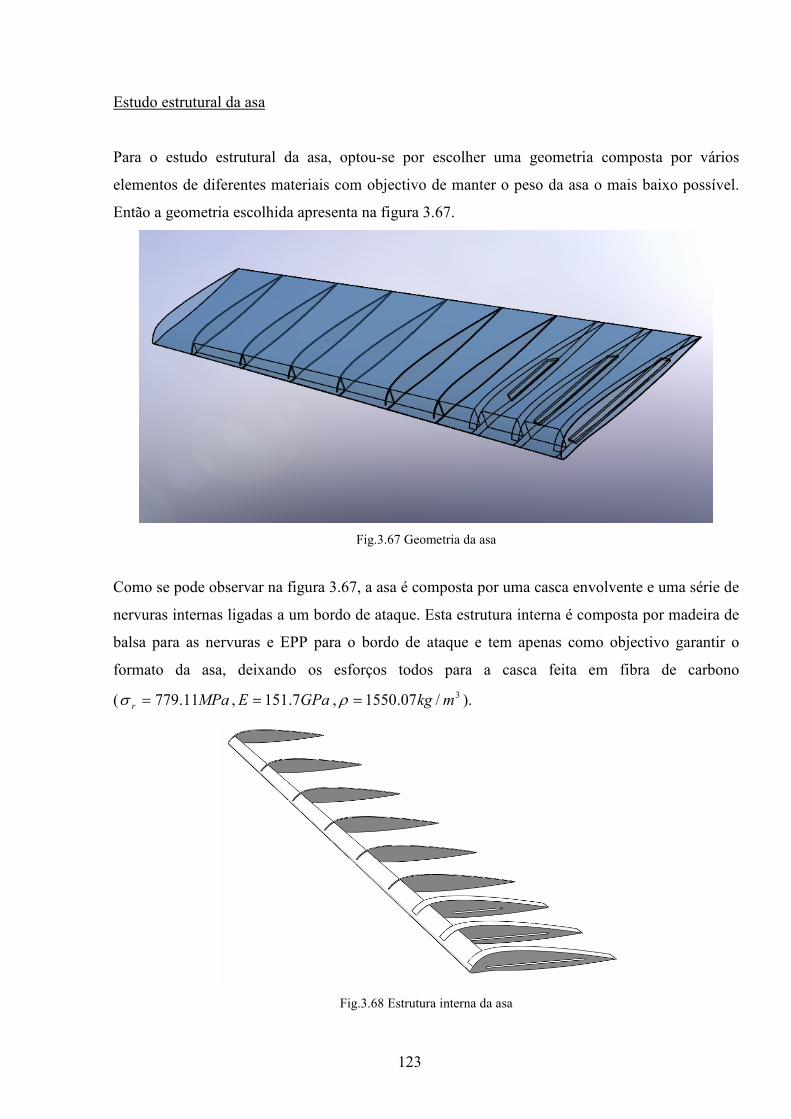
123
Estudo estrutural da asa
Para o estudo estrutural da asa, optou-se por escolher uma geometria composta por vários
elementos de diferentes materiais com objectivo de manter o peso da asa o mais baixo possível.
Então a geometria escolhida apresenta na figura 3.67.
Fig.3.67 Geometria da asa
Como se pode observar na figura 3.67, a asa é composta por uma casca envolvente e uma série de
nervuras internas ligadas a um bordo de ataque. Esta estrutura interna é composta por madeira de
balsa para as nervuras e EPP para o bordo de ataque e tem apenas como objectivo garantir o
formato da asa, deixando os esforços todos para a casca feita em fibra de carbono
( MPar 11.779=σ , GPaE 7.151= , 3/07.1550 mkg=ρ ).
Fig.3.68 Estrutura interna da asa

124
Prosseguindo ao estudo estrutural da casca, consegue-se chegar aos seguintes resultados de
tensões e deslocamentos para uma casca com 0.175 mm de espessura.
Fig.3.69Distribuição das tensões na parte superior da casca
Fig.3.70 Distribuição das tensões na parte inferior da casca

125
Fig.3.71 Deslocamentos na parte superior da casca
Fig.3.72 Deslocamentos na parte inferior da casca
Como se pode observar nas figuras acima, a casca em fibra de carbono consegue suportar todos
os esforços sem sofrer grandes deformações. Esta configuração permitiu que a asa apresentasse
um peso muito inferior ao calculado, fazendo com que o peso do corpo e do servo para controlo
dos “ailerons” possa ser incluído no conjunto das asas.

126
Estudo estrutural da fuselagem
Por se tratar de um UAV, a fuselagem apenas serve para alojar a aviónica e a célula de
combustível que neste caso acabam por ser coisas muito leves, não contribuindo para algum
esforço intenso sobre a fuselagem. Por outro lado, o veículo em questão não experimenta grandes
pressões devido à resistência do ar na fuselagem. Sendo assim, a parte frontal da fuselagem pode
ser feita em EPP ou de algum polímero, enquanto que a parte traseira fuselagem (elemento que
faz a ligação à empenagem) é feita de algum material mais resistente porque é nesta zona que a
fuselagem vai estar sujeita a maiores esforços devido às forças causadas pela empenagem.
Para o estudo estrutural da parte traseira da fuselagem (elemento de ligação
fuselagem/empenagem), optou-se por escolher a fibra de carbono como material com 0.1 mm de
espessura (0.12mm de espessura na secção mais fina). E o estudo estrutural em elementos finitos
permite chegar aos seguintes resultados:
Fig.3.73Distribuição das tensões no elemento de ligação fuselagem/empenagem

127
Fig.3.74 Deslocamentos no elemento de ligação fuselagem/empenagem
Como se pode observar nas figuras 3.73 e 3.74, a geometria escolhida consegue suportar os
esforços sem grandes deformações. A geometria apresenta-se em forma de casca, ou seja, oca no
seu interior para servir de abrigo ao sistema que permitirá o manuseamento das superfícies de
controlo na empenagem.

128
3.3.13 – Análise de custos
A análise de custos que se segue não se baseia em nenhum método encontrado na bibliografia,
visto que os mesmos métodos encontram-se desactualizados em relação à situação financeira
actual ou mesmo da última década. Sendo assim, a análise de custos vai recair numa estimativa
algo grosseira baseada nas peças compradas e na quantidade de materiais necessária para fabricar
uma unidade. Os custos de maquinação, mão-de-obra, controlo da qualidade e testes de voo
tiveram uma aproximação à escala dos custos das aeronaves convencionais.
Tabela.III Custo associado a uma unidade

129
4 – Conclusões
O presente estudo tinha como objectivo o desenvolvimento conceptual da célula de um Mini-
UAV e este mesmo estudo foi realizado com base nos métodos correntes de desenvolvimento de
aeronaves reais.
O uso dos métodos correntes de desenvolvimento de aeronaves reais para o desenvolvimento de
Mini-UAV fica assim válido com a aeronave desenvolvida no caso de estudo que apresenta as
seguintes características em unidades S.I. (as restantes características podem ser encontradas no
final deste trabalho na secção dos desenhos):
Peso máximo à descolagem: kgWo 84.3= ;
Peso vazio: kgWe 27.3= ;
Peso e volume de combustível: lVkgWf 7.056.0 == ;
Envergadura de asa: mb 82.1= ;
Relação peso/potência: hpkghpW /56.2/ = ;
Carga alar: 2/17.8/ mkgSW = ;
Área alar: 247.0 mS = ;
Raio de acção: kmR 50= ;
Altitude de serviço: m150 ;
Além destes resultados, a aeronave consegue apresentar um custo unitário na ordem dos 6000 €.
Este valor é bem inferior aos típicos 20 165 € (equivalente a 28 500 dólares americanos) dos
modelos de elite desta categoria (os RQ-14 A Dragon Eye e RQ-11 B Raven do exército norte-
americano [4]).
Como trabalho futuro, seria interessante construir de um modelo à escala para ensaios em túnel
de vento para obter informação mais precisa do que aquela que foi utilizada neste trabalho.
Este conjunto de ensaios em túnel de vento pode constituir uma segunda fase de estudo antes da
construção de um protótipo em escala real para testes de voo. É de lembrar que durante a
construção do protótipo, seja feita uma verificação da posição do centro de gravidade de modo a
manter os limites dentro dos valores calculados anteriormente. Caso não se apresente dentro dos
limites, o problema pode ser solucionado com adição de lastro estrategicamente localizado, isto

130
porque a análise estrutural revelou que as componentes apresentarão um peso relativamente abaixo
do que foi calculado.

131
Referências Bibliográficas
• [1] Space War (06/11/2007),
http://www.spacewar.com/reports/Teal_Group_Predicts_World_UAV_Market_Will_Top_54_Billion_
Over_Next_Decade_999.html , acedido em 15/03/2009.
• [2] Barnard Microsystems Limited (01/01/2009),
http://www.barnardmicrosystems.com/L4E_uav_market.htm , acedido em 15/03/2009.
• [3] Gonçalves-Coelho, A.M., Luís C. Veloso, Victor J. A. S. Lobo. Tests of a light UAV for naval
surveillance. In: OCEANS 2007 - EUROPE, 2007. Aberdeen. OCEANS 2007 - Europe. Aberdeen:
Institute of Electrical and Electronics Engineers Computer Society, Piscataway, NJ, 2007, 4 p.
• [4] Gonçalves-Coelho, A.M., Nestian, G, Bunea, M. Building a Low-cost Miniature UAV for Military
Purposes with Commercially Available Components. In: INTERNATIONAL CONFERENCE ON
CORROSION AND MODERN TECHNOLOGIES IN THE MILITARY, 2008. Bucharest.
International Conference on Corrosion and Modern Technologies in the Military. Bucharest: 2008, 5
p.
• [5] Barnard Microsystems Limited (01/01/2009),
http://www.barnardmicrosystems.com/L3_features.htm , acedido em 26/01/2009.
• [6] FAA - Federal Aviation Administration (16/03/2009),
http://www.faa.gov/news/fact_sheets/news_story.cfm?newsId=6287 , acedido em 16/03/2009.
• [7] ICAO - International Civil Aviation Organization (12/03/2009), http://www.icao.int/ , acedido em
17/03/2009.

132
• [8] Raymer, D.P. (1992). Aircraft Design: A conceptual Approach, ISBN 0-930403-51-7, AIAA Education
Series., Washington, DC.
• [9] Niu, Michael Chun-Yung. (1995). Airframe Structural Design, ISBN 962-7128-04-X, Lockheed
Aeronautical Systems Company, Burbank, California.
• [10] RC universe (29/04/2009),
http://www.rcuniverse.com/magazine/article_display.cfm?article_id=519 , acedido em 29/04/2009.
• [11] Hobby-eStore (29/04/2009), http://www.hobby-estore.com/t-34-scale-4ch-rc-electric-
airplane.html , acedido em 29/04/2009.
• [12] Micropilot (29/04/2009), http://www.micropilot.com/products-uav-trainers.htm , acedido em
29/04/2009.
• [13] Global Security (29/01/2009), http://www.globalsecurity.org/intell/systems/dragon-eye-refs.htm ,
acedido em 29/01/2009.
• [14] Defense Industry Daily (29/04/2009),
http://www.defenseindustrydaily.com/images/AIR_UAV_RQ-11_Raven_lg.jpg , acedido em
29/04/2009.
• [15] Gomes, R.M. (2009), “UAV-Veículo Aéreo Não Tripulado”, projecto realizado para a disciplina
de Projecto I.

133
• [16] Saito Engines (29/04/2009), http://www.saitoengines.com/ , acedido em 29/04/2009.
• [17] SolidWorks (18/05/2009), http://www.solidworks.com/ , acedido em 18/05/2009.

134
Anexos
Anexo I – constantes para o cálculo We/Wo [8]
Anexo II – valores típicos para o coeficiente volumétrico da empenagem [8]
Anexo III – valores típicos para o ângulo de diedro Γ da asa [8]

135
Anexo IV – valores típicos para o alongamento e relação de estreitamento da empenagem [8]
Anexo V – aerofólio NACA 63012 [11]

136
Anexo VI – aerofólio NACA 0009 [11]

137
Desenhos
Desenho I – desenho da aeronave
Related Documents











