TEORÍA CARGAS DINÁMICAS Ing. Hugo A. Tosone JTP: Marzo de 2012 Profesor Titular: Ing. MECANICA ESTABILIDAD II Dr. Federico Cavalieri Universidad Tecnológica Nacional Facultad Regional Santa Fe 2

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
TEORÍACARGAS DINÁMICAS
Ing. Hugo A. Tosone
JTP:
Marzo de 2012
Profesor Titular:
Ing. MECANICA
ES
TA
BIL
IDA
D II
Dr. Federico Cavalieri
UniversidadTecnológicaNacional
FacultadRegional
Santa Fe
TEORÍACARGAS DINÁMICAS
Ing. Hugo A. Tosone
JTP:
Marzo de 2012
Profesor Titular:
Ing. CIVIL
RE
S.
DE
MA
TE
RIA
LE
SMg. Alejandro Carrere
UniversidadTecnológicaNacional
FacultadRegional
Santa Fe
2 9
CONTENIDOS
Clasificación de las cargas: estáticas y dinámicas.
Comentario sobre eventual efecto vibratorio de las cargas dinámicas.
Comportamiento deformacional con cargas dinámicas. Tensión admisible.
Método de la carga estática equivalente. Análisis para solicitación axial.
Impacto vertical y horizontal.
Variante considerando la masa propia del cuerpo golpeado: coeficiente (km) de reducción de masa al punto de impacto.
Consideración al no tener en cuenta la masa propia y modo en que modifica el coeficiente de seguridad. Casos en que es dificultoso obtener km.
Consideración de una eventual masa amortiguadora colocada en el punto de im-pacto.
Carga súbita.
Impacto en flexión y en torsión.
Sistemas elásticos combinados.
Anexo: Rigidez de sistemas elásticos “serie” y “paralelo”.
Tabla de valores de coeficientes de reducción de masa y de corrimientos estáti-cos.
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 1 -
CARGAS DINÁMICAS
Clasificación de las cargas:
Según sea la velocidad de aplicación de las cargas, pueden clasificarse como estáticas o como dinámicas.
Cargas estáticas:
Su magnitud varía muy lentamente desde valor nulo hasta su valor definitivo. En conse-cuencia las aceleraciones que en esas condiciones reciben los componentes estructurales son prácticamente despreciables.
Ello hace que el componente esté en equilibrio estable (no acelerado) en cada instante del proceso de carga.
En consecuencia el tiempo de aplicación de la carga en ese caso, tiene influencia despre-ciable sobre la acción de la misma y sobre las tensiones que se producen en el componente estructural, como así también sobre las propiedades mecánicas del material.
Cargas dinámicas:
Son aquellas que varían con rapidez desde valor nulo hasta su valor definitivo, producien-do aceleraciones importantes sobre los componentes estructurales.
Según la velocidad de aplicación pueden distinguirse dos casos:
IMPACTO (O CHOQUE) DE ALTA VELOCIDAD: ocurre cuando el tiempo de aplicación de la carga es extremadamente corto, como por ejemplo el impacto provocado por el proyectil de un arma de fuego sobre el objeto impactado.
IMPACTO (O CHOQUE) DE BAJA VELOCIDAD: ocurre cuando las cargas se aplican en un perío-do considerable de tiempo, durante el cual le imprimen aceleración al cuerpo sobre el que actúan. El tiempo de aplicación, desde valor nulo de la carga hasta el valor máximo es tal, que el material resistente presenta similares características mecánicas que las que pre-senta frente a carga estática (respuesta elástica del cuerpo golpeado). Bajo estas condi-ciones el efecto del choque de la carga en movimiento puede considerarse como equiva-lente al de una carga estática más grande.
CARGA SÚBITA: la carga se aplica súbitamente pero no posee velocidad antes del contacto.
La diferencia entre los dos primeros tipos de choque no depende solamente de la veloci-dad del impacto, sino también de la masa relativa de los cuerpos, de sus uniones a otros componentes y de las propiedades de los materiales.
Efecto vibracional (perioricidad y resonancia)
La carga dinámica que se repite en forma periódica puede ocasionar una vibración del cuerpo resistente. Si la frecuencia de los impulsos de la carga dinámica es cercana a la fre-cuencia natural de vibración del cuerpo, puede producir resonancia, causando desplazamien-tos por deformación cada vez mayores que incrementan cada vez más la magnitud de las tensiones y puede eventualmente producir la rotura.
Comportamiento deformacional y rotura.
Energía almacenada
La deformación de rotura por impacto se reduce considerablemente (especialmente cuan-do existe concentración de tensiones) y por lo tanto la energía de deformación absorbida re-sulta ser mucho menor y cambia la forma de la rotura.
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 2 -
Aspecto de la rotura
Al reducirse la deformación específica de rotura aumenta la fragilidad del material. Por ello ciertas roturas en materiales dúctiles por causa de impacto, pueden presentar el aspecto de la fractura de un material frágil.
Tensión admisible.
Los ensayos con carga dinámica muestran un aumento del límite de fluencia f y de la
tensión de rotura R en relación a los ensayos con carga estática.
Este hecho haría pensar en la posibilidad de aumentar las tensiones admisibles, pero en la práctica ocurre que:
Es de difícil ponderación el real valor de las cargas dinámicas, siendo mayor el error que se comete en relación con las cargas estáticas.
Si por efecto de la acción dinámica resulta una deformación permanente que se sume a las que ocurren al reiterarse eventualmente el impacto, resultará una situación más peli-grosa que con carga estática, porque la deformación puede alcanzar valores inadmisibles.
Método de la carga estática equivalente - coeficiente dinámico.
Este método se utiliza para determinar esfuerzos y deformaciones producidas por cargas dinámicas de baja velocidad (no vibratorias).
Consiste en determinar la carga máxima sobre el cuerpo resistente, provocada por la ac-ción del cuerpo en movimiento y considerar luego que es estática (carga estática equivalen-te). Con la carga estática equivalente se pueden luego calcular las tensiones y deformacio-nes del modo ya conocido para carga estática.
Las tensiones originadas en el cuerpo resistente por una carga dinámica, son mayores que las que produciría la misma carga en forma estática. La carga estática necesaria para ocasionar el mismo esfuerzo que la carga dinámica, se denomina “carga de choque” o “carga estática equivalente” y se la puede obtener multiplicando a la carga estática por un coeficien-te de impacto o coeficiente dinámico que se identificará com “kd”.
El coeficiente dinámico es distinto para cada tipo de solicitación y su valor es solo una aproximación al efecto dinámico real de la carga en movimiento.
La determinación en forma rigurosa de las tensiones que se originan por cargas dinámicas es compleja y por ello se recurre a esta solución más simple (carga estática equivalente) que no proporciona gran exactitud pero permite calcular las tensiones, deformaciones y despla-zamientos con una aproximación suficiente para los casos prácticos.
Hipótesis. Para desarrollar el método se acepta que:
1.- Se trata de impacto de “baja velocidad” por lo que la velocidad del cuerpo que golpea
es pequeña en comparación con la velocidad de propagación de las ondas de choque
en el cuerpo golpeado, siendo el tiempo que dura el impacto, bastante mayor que el
necesario para que las ondas de choque se propaguen por todo el volumen del cuer-
po golpeado.
2.- El choque es inelástico por lo que los cuerpos no se separan luego del impacto. Por
tal motivo, durante el choque no se conserva la energía pero se conserva la cantidad
de movimiento.
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 3 -
3.- El cuerpo que golpea es absolutamente rígido.
4.- El cuerpo golpeado tiene un grado de libertad y sus desplazamientos son proporciona-
les a las fuerzas correspondientes (ley de Hooke) tanto en el caso de acción dinámica
como estática.
5.- El aspecto de la deformación del cuerpo golpeado es igual al de la deformación origi-
nada por la acción estática de la fuerza correspondiente, aplicada en el lugar donde
ocurre el choque y en la dirección que se produce el mismo.
6.- Las tensiones en el cuerpo golpeado no superan el límite de proporcionalidad del ma-
terial (proceso conservativo).
Símbolos que se utilizarán:
F: sección transversal de la barra.
l : longitud de la barra.
h: altura de caída del cuerpo que golpea.
C: rigidez del cuerpo golpeado para el tipo de deformación correspondiente.
m: masa del cuerpo que golpea.
Q: peso del cuerpo que golpea.
mo: masa del cuerpo golpeado.
Qo: peso del cuerpo golpeado.
m1: masa amortiguadora colocada en el punto de impacto del cuerpo golpeado.
Q1: peso de una masa amortiguadora en el punto de impacto.
v: velocidad del cuerpo que golpea en el instante previo al impacto.
v1: velocidad en ambos cuerpos en el punto de impacto, luego del choque.
km: coeficiente de reducción de la masa (del cuerpo golpeado) al punto donde ocurre el
impacto
k: valor unitario de energía cinética conservada luego del choque (varía entre 0 y 1)
kd: coeficiente dinámico o coeficiente de impacto.
st: desplazamiento lineal en el punto de impacto, producido por la carga Q actuando
estáticamente.
: máximo desplazamiento lineal del punto de impacto, en la dirección del choque.
st: tensión producida (en el cuerpo golpeado) por la carga Q actuando estáticamente.
d: máxima tensión dinámica producida por la carga Q actuando dinámicamente.
d_adm: tensión dinámica admisible.
st: ángulo girado por torsión y producido por la carga Q actuando estáticamente.
ó d: máximo desplazamiento angular producido por la carga dinámica.
To: energía cinética del cuerpo que golpea en el instante previo al impacto.
Ust: energía potencial de deformación elástica del cuerpo golpeado, correspondiente a
la acción estática de Q.
P: carga estática equivalente. Carga que actuando en forma estática produce la misma
deformación dinámica .
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 4 -
Análisis para solicitación axial
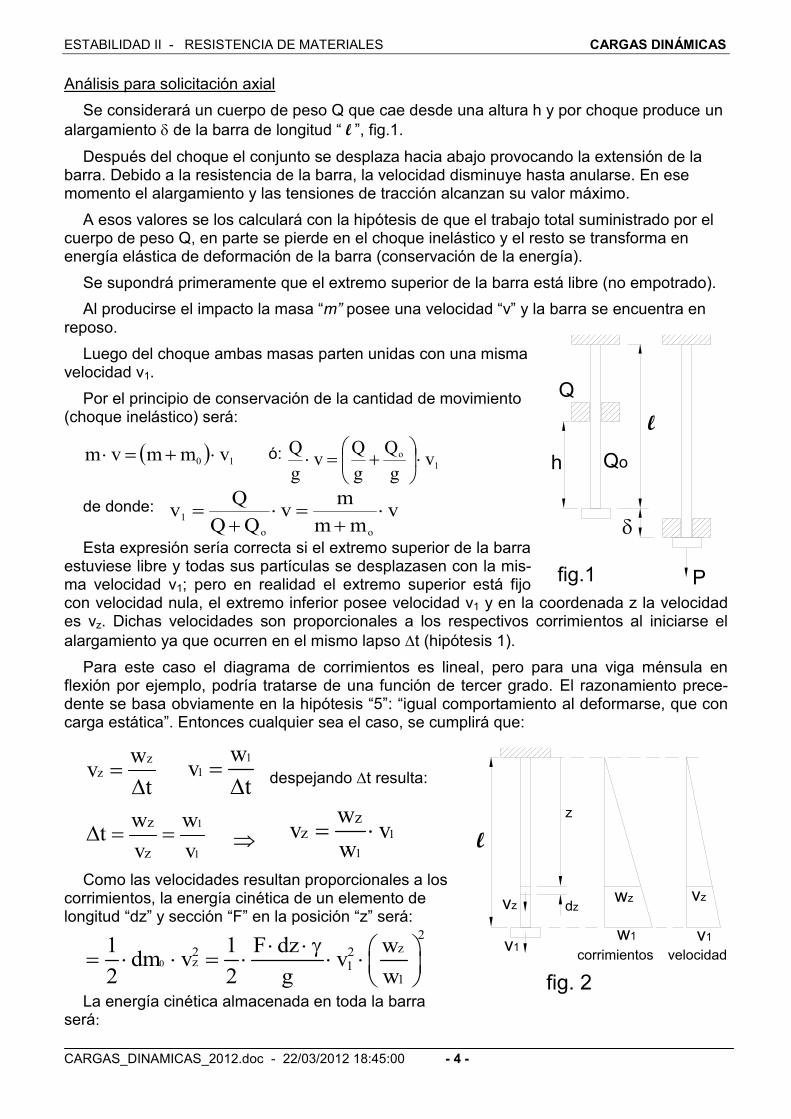
Se considerará un cuerpo de peso Q que cae desde una altura h y por choque produce un
alargamiento de la barra de longitud “ l ”, fig.1.
Después del choque el conjunto se desplaza hacia abajo provocando la extensión de la barra. Debido a la resistencia de la barra, la velocidad disminuye hasta anularse. En ese momento el alargamiento y las tensiones de tracción alcanzan su valor máximo.
A esos valores se los calculará con la hipótesis de que el trabajo total suministrado por el cuerpo de peso Q, en parte se pierde en el choque inelástico y el resto se transforma en energía elástica de deformación de la barra (conservación de la energía).
Se supondrá primeramente que el extremo superior de la barra está libre (no empotrado).
Al producirse el impacto la masa “m” posee una velocidad “v” y la barra se encuentra en reposo.
Luego del choque ambas masas parten unidas con una misma velocidad v1.
Por el principio de conservación de la cantidad de movimiento (choque inelástico) será:
10 vmmvm ó: 1
o vg
Q
g
Qv
g
Q
de donde: vmm
mv
Qv
oo
1
Esta expresión sería correcta si el extremo superior de la barra estuviese libre y todas sus partículas se desplazasen con la mis-ma velocidad v1; pero en realidad el extremo superior está fijo con velocidad nula, el extremo inferior posee velocidad v1 y en la coordenada z la velocidad es vz. Dichas velocidades son proporcionales a los respectivos corrimientos al iniciarse el
alargamiento ya que ocurren en el mismo lapso t (hipótesis 1).
Para este caso el diagrama de corrimientos es lineal, pero para una viga ménsula en flexión por ejemplo, podría tratarse de una función de tercer grado. El razonamiento prece-dente se basa obviamente en la hipótesis “5”: “igual comportamiento al deformarse, que con carga estática”. Entonces cualquier sea el caso, se cumplirá que:
zz
wv
t
1
1
wv
t
despejando t resulta:
1
1
z
z
w wt
v v
1
1
zz
wv v
w
Como las velocidades resultan proporcionales a los corrimientos, la energía cinética de un elemento de longitud “dz” y sección “F” en la posición “z” será:
0
2z2 2
z 11
1 1 F dz wdm v v
2 2 g w
La energía cinética almacenada en toda la barra será:
Q
Qo
P
l
fig.1
h
dz
z
wz
corrimientos velocidad
fig. 2
l
v1w1
vz
v1
vz
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 5 -
2 2z z2 2
1 11 10 0
F w F 1 wv dz v dz
2g w 2g w
220 z1
10
Q v 1 wdz
2g w
20 1Q v
km2g
siendo:
2z
m
10
1 wk dz
w
[1](*)
En la expresión [1] “km” es el denominado coeficiente de reducción de masa al punto de impacto. (*) Si la barra posee sección variable la expresión se altera (ver ANEXO).
El factor km es menor que “1” si wz w1 en la integral. Significa entonces que la energía cinética almacenada es la que tendría una “masa reducida” de valor “km Q0” posicionada en el punto de impacto. Ello se debe a que en este caso particular planteado, las partículas po-seen velocidades menores a v1.
El factor km varía con el tipo de solicitación; para el caso de solicitación axial, de la fig. 2 se
deduce que: 1
w zz
w
con lo que la [1] resulta:
2 2 3 3z
m2 3
10 0 0
1 w 1 z 1 z 1k dz dz
w 3 3
3
1k
m
Velocidad luego del choque inelástico.
Por el principio de conservación de la cantidad de movimiento:
1
0m vg
QkQv
g
Q
y despejando v1 resulta: 1
m 0
Qv v
Q k Q
Energía cinética luego del choque:
Teniendo en cuenta la expresión de v1, la energía cinética del conjunto luego del choque es:
Q
Qk1
1
g2
vQ
QkQ
QvQkQ
g2
1v
g
QkQ
2
1
0m
2
2
0m
22
0m
2
1
0m
haciendo:
Q
Qk1
1k
0m
[2] la energía cinética del conjunto en el instante posterior al
choque queda expresada del siguiente modo: kg2
vQ 2
Por ser k 1 ha ocurrido entonces una pérdida de energía, puesto que antes del choque la
energía disponible era: hQóg2
vQ 2
Para calcular la deformación “” se puede recurrir al principio de conservación de la ener-gía en el proceso que sigue al choque. A partir de ese instante la carga Q sigue entregando
energía potencial en la cantidad “Q.” hasta que el extremo alcanza la máxima elongación.

ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 6 -
Despreciando la energía potencial que también entrega la masa golpeada (ya que cada partícula de ella desciende de acuerdo a su posición), como primera aproximación se puede plantear que “la energía cinética del conjunto luego del choque, más la entrega de energía potencial de la carga Q en el descenso, se convierten en energía potencial de deformación elástica de la barra” del siguiente modo:
2
PQk
g2
vQ 2
[3]
en la que P es la máxima fuerza que solicita a la barra cuando la deformación alcanza el va-
lor “”.
Siendo: EF
P
es:
EFP
el segundo miembro de la [3] queda: 2
2
EF
2
EF
2
P
reemplazado en la [3] se obtiene:
2
2
2
EFQk
g2
vQ
que se puede ordenar del modo siguiente:
0kg2
vQQ
2
EF 2
2
y multiplicando todo por
EF
2
la anterior queda así:
0kg2
v
EF
Q2
EF
Q2 2
2
[3´ ]
en la que stEF
Q
es la deformación producida por Q actuando estáticamente.
Además hg2
v2
sustituyendo en la [3´] se obtiene: 0kh22 stst
2 [3´´]
ecuación de 2° grado en “” cuya resolvente es: 2
kh2442 st
2
stst
operando:
k
h211kh2
st
stst
2
stst
Se ha considerado solamente el signo “+” porque es mayor que st.
Haciendo: kh2
11kst
d
[4] la anterior queda dst k [5]

ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 7 -
Teniendo en cuenta que la energía disponible antes del choque es:
g2
vQT
2
0
que la energía de deformación provocada por Q en forma estática es:
2
QU st
st
y siendo: hg2
v2
y
C
Qst
(C: rigidez de sistemas combinados, ver Anexo), la [4] se
puede expresar de las siguientes maneras:
kU
T11k
g
v11k
Q
Ch211k
h211k
st
0
st
2
st
d
[4]
Al factor kd de la [4] se lo denomina “coeficiente dinámico” o “coeficiente de impacto” y
en base a él se pueden calcular también:
dstd k [6] dkQP [7]
Es decir que una vez determinado el coeficiente dinámico kd (para el tipo estructural y de solicitación dados) se calculan las tensiones y las deformaciones producidas por la carga estática Q, y a los valores obtenidos se los incrementa con el coeficiente dinámico kd.
En base a la [6] la condición de resistencia que incluye los casos de distribución variable de tensiones en la sección (caso de flexión) será:
adm_ddmáx_stmáx_d k [8]
en la que d_adm es la tensión dinámica admisible.
Impacto horizontal:
En la ecuación de segundo grado [3´] corresponde hacer Q. = 0 por no existir dicho traba-jo. Resolviendo la ecuación de 2° grado reducida, el coeficiente dinámico resulta entonces:
kh2
kst
d
[9-a] y como:
g2
vh
2
la [9-a] se puede expresar del siguiente modo: kg
vk
st
2
d
[9-b]
ya que en el impacto horizontal se suele contar con la velocidad “v” como dato.
Al igual que en el caso de choque vertical, en este caso las [9] se pueden expresar así:
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 8 -
kU
Tk
g
vk
st
0
st
2
d
[9]
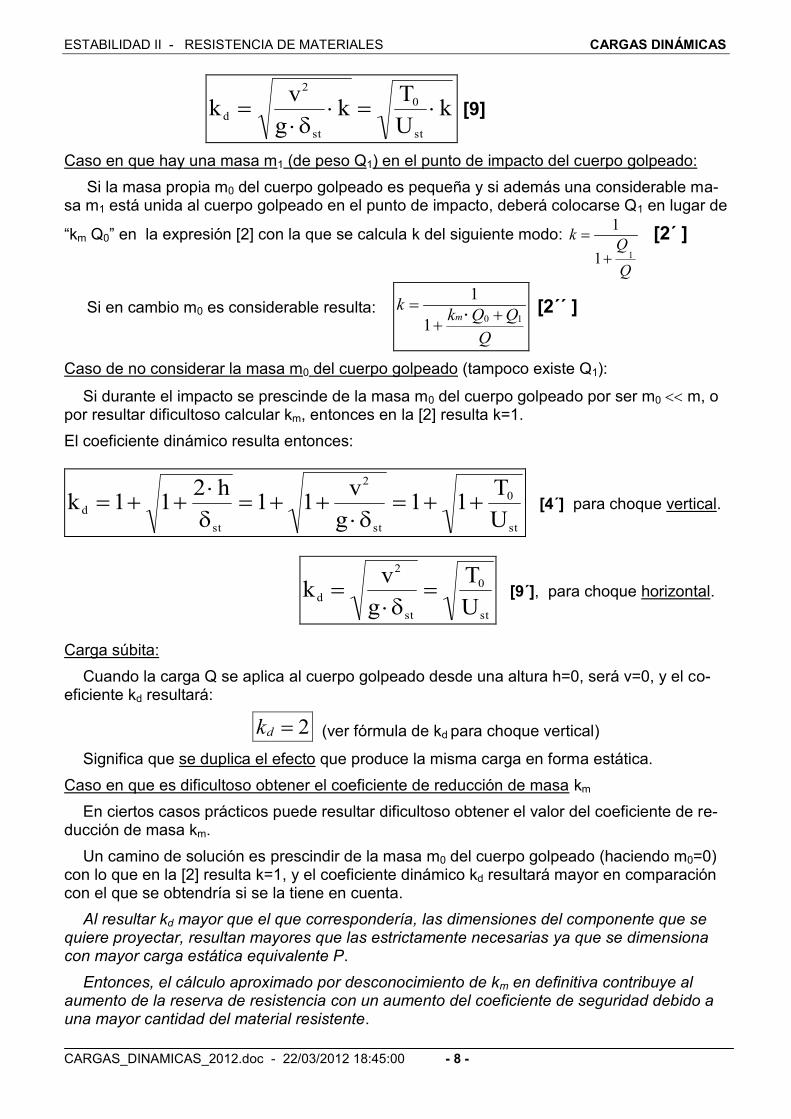
Caso en que hay una masa m1 (de peso Q1) en el punto de impacto del cuerpo golpeado:
Si la masa propia m0 del cuerpo golpeado es pequeña y si además una considerable ma-sa m1 está unida al cuerpo golpeado en el punto de impacto, deberá colocarse Q1 en lugar de
“km Q0” en la expresión [2] con la que se calcula k del siguiente modo: 1
1
1
kQ
Q
[2´ ]
Si en cambio m0 es considerable resulta: 0 1
1
1m
kk Q Q
Q
[2´´ ]
Caso de no considerar la masa m0 del cuerpo golpeado (tampoco existe Q1):
Si durante el impacto se prescinde de la masa m0 del cuerpo golpeado por ser m0 m, o por resultar dificultoso calcular km, entonces en la [2] resulta k=1.
El coeficiente dinámico resulta entonces:
st
0
st
2
st
dU
T11
g
v11
h211k
[4´] para choque vertical.
st
0
st
2
dU
T
g
vk
[9´], para choque horizontal.
Carga súbita:
Cuando la carga Q se aplica al cuerpo golpeado desde una altura h=0, será v=0, y el co-eficiente kd resultará:
2dk (ver fórmula de kd para choque vertical)
Significa que se duplica el efecto que produce la misma carga en forma estática.
Caso en que es dificultoso obtener el coeficiente de reducción de masa km
En ciertos casos prácticos puede resultar dificultoso obtener el valor del coeficiente de re-ducción de masa km.
Un camino de solución es prescindir de la masa m0 del cuerpo golpeado (haciendo m0=0) con lo que en la [2] resulta k=1, y el coeficiente dinámico kd resultará mayor en comparación con el que se obtendría si se la tiene en cuenta.
Al resultar kd mayor que el que correspondería, las dimensiones del componente que se quiere proyectar, resultan mayores que las estrictamente necesarias ya que se dimensiona con mayor carga estática equivalente P.
Entonces, el cálculo aproximado por desconocimiento de km en definitiva contribuye al aumento de la reserva de resistencia con un aumento del coeficiente de seguridad debido a una mayor cantidad del material resistente.
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 9 -
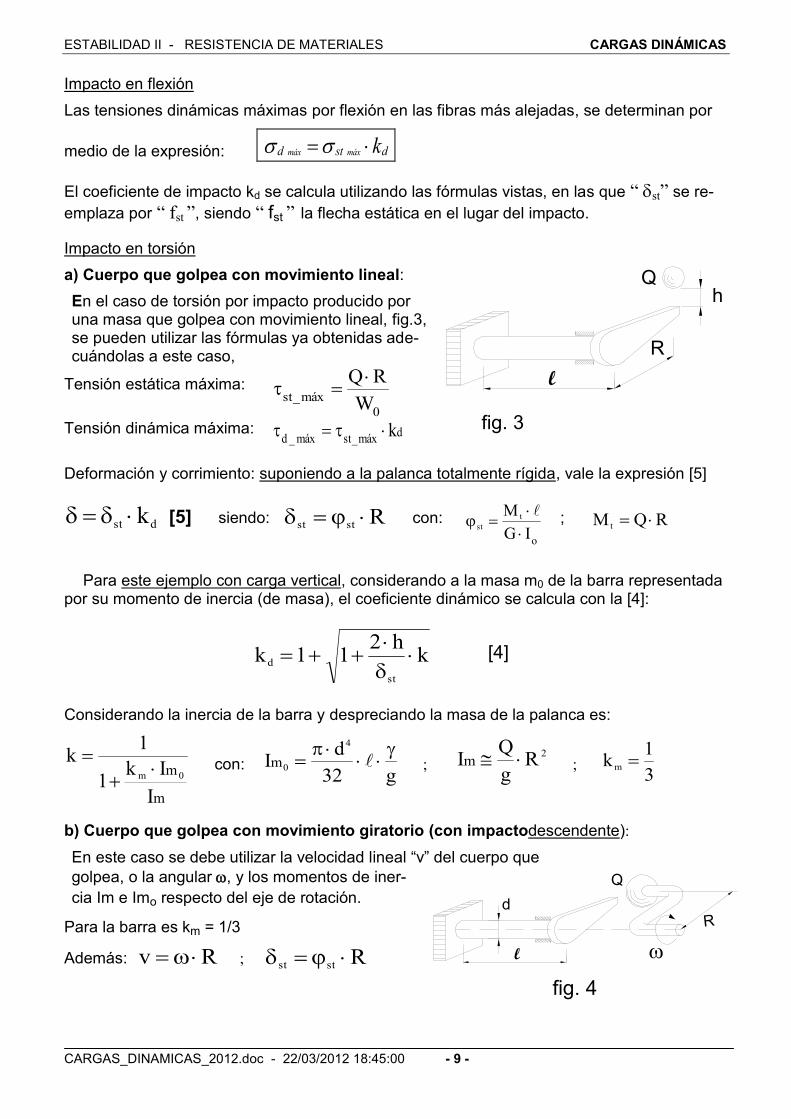
Impacto en flexión
Las tensiones dinámicas máximas por flexión en las fibras más alejadas, se determinan por
medio de la expresión: máx máxd st dk
El coeficiente de impacto kd se calcula utilizando las fórmulas vistas, en las que “ st” se re-
emplaza por “ fst ”, siendo “ fst ” la flecha estática en el lugar del impacto.
Impacto en torsión
a) Cuerpo que golpea con movimiento lineal:
En el caso de torsión por impacto producido por una masa que golpea con movimiento lineal, fig.3, se pueden utilizar las fórmulas ya obtenidas ade-cuándolas a este caso,
Tensión estática máxima:
0
máxst_ W
RQ
Tensión dinámica máxima: dmáxst_máx_d
k
Deformación y corrimiento: suponiendo a la palanca totalmente rígida, vale la expresión [5]
dst k [5] siendo: Rstst con:
oIG
M t
st
; RQM t
Para este ejemplo con carga vertical, considerando a la masa m0 de la barra representada por su momento de inercia (de masa), el coeficiente dinámico se calcula con la [4]:
kh2
11kst
d
[4]
Considerando la inercia de la barra y despreciando la masa de la palanca es:
m
m
I
Ik1
1k
0m
con:
g32
dI
4
0m
;
2Rg
QIm ;
3
1km
b) Cuerpo que golpea con movimiento giratorio (con impactodescendente):
En este caso se debe utilizar la velocidad lineal “v” del cuerpo que
golpea, o la angular , y los momentos de iner-
cia Im e Imo respecto del eje de rotación.
Para la barra es km = 1/3
Además: Rv ; Rstst
l
fig. 3
Qh
R
Q
dR
l
fig. 4
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 10 -
kg
R11k
Rg
R11k
g
v11k
st
2
st
22
st
2
d
m
m
I
Ik1
1k
0m
;
g32
dI
4
0m
; 2R
g
QIm ;
0
t
stIG
RQ
IG
M
o
Si el impacto es horizontal resultará: kg
Rk
g
vk
st
2
st
2
d
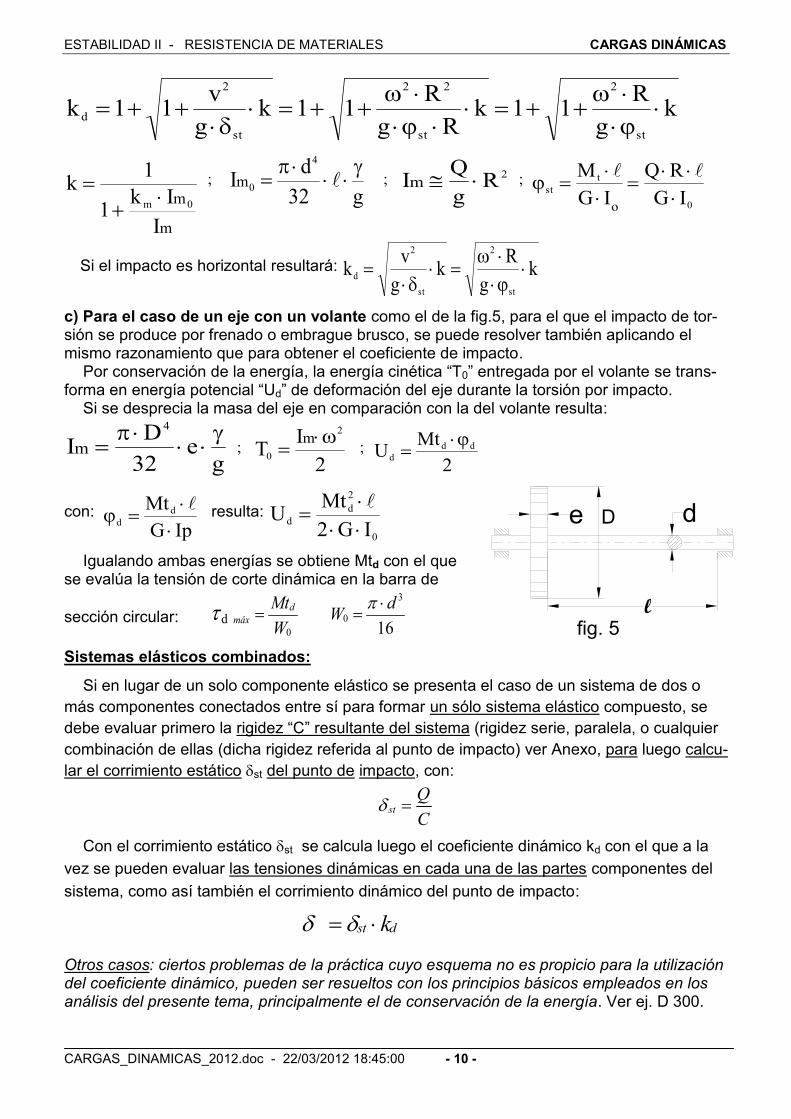
c) Para el caso de un eje con un volante como el de la fig.5, para el que el impacto de tor-sión se produce por frenado o embrague brusco, se puede resolver también aplicando el mismo razonamiento que para obtener el coeficiente de impacto.
Por conservación de la energía, la energía cinética “T0” entregada por el volante se trans-forma en energía potencial “Ud” de deformación del eje durante la torsión por impacto.
Si se desprecia la masa del eje en comparación con la del volante resulta:
ge
32
DI
4
m
;
2
IT
2
0
m ;
2
MtU dd
d
con:
IpG
Mt d
d
resulta:
0
2
d
dIG2
MtU
Igualando ambas energías se obtiene Mtd con el que se evalúa la tensión de corte dinámica en la barra de
sección circular:
3
0
0
d16
d
máx
Mt dW
W
Sistemas elásticos combinados:
Si en lugar de un solo componente elástico se presenta el caso de un sistema de dos o
más componentes conectados entre sí para formar un sólo sistema elástico compuesto, se
debe evaluar primero la rigidez “C” resultante del sistema (rigidez serie, paralela, o cualquier
combinación de ellas (dicha rigidez referida al punto de impacto) ver Anexo, para luego calcu-
lar el corrimiento estático st del punto de impacto, con:
st
Q
C
Con el corrimiento estático st se calcula luego el coeficiente dinámico kd con el que a la
vez se pueden evaluar las tensiones dinámicas en cada una de las partes componentes del
sistema, como así también el corrimiento dinámico del punto de impacto:
st dk
Otros casos: ciertos problemas de la práctica cuyo esquema no es propicio para la utilización del coeficiente dinámico, pueden ser resueltos con los principios básicos empleados en los análisis del presente tema, principalmente el de conservación de la energía. Ver ej. D 300.
D
l
e d
fig. 5
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 11 -
Comentarios finales:
El coeficiente dinámico kd es distinto para cada tipo estructural y para cada tipo de solicita-ción dinámica. Su valor debe ser considerado solamente como una aproximación para obte-ner las cantidades dinámicas.
Las condiciones que influyen en un componente estructural bajo cargas dinámicas, son siempre múltiples e inclusive de dificultoso análisis. Es por ello que el comportamiento de una estructura no puede predecirse generalmente con mucha exactitud.
En los problemas en los que intervienen cargas dinámicas, el objetivo principal no consiste solamente en determinar la carga estática equivalente, los corrimientos y los esfuerzos máximos dinámicos, sino también en seleccionar adecuadamente la forma, el material y además ajustar adecuadamente su rigidez relativa y sus conexiones o uniones con otros componentes de la estructura, todo ello relacionado obviamente con el diseño.
Esto último es necesario para que la energía cedida por la carga dinámica se distribuya lo más uniformemente posible en la estructura resistente y sus conexiones.
Esta distribución puede conseguirse adoptando formas y dimensiones de tal manera que las tensiones se distribuyan lo más uniformemente posible, ya que la energía elástica alma-cenada en el material, es proporcional al cuadrado de la tensión en cada partícula.
Comparación entre resistencias con cargas estática y con carga dinámica.
La resistencia elástica de un componente solicitado estáticamente depende solamente de la tensión máxima que ocurra en determinados lugares del volumen del mismo.
En cambio la resistencia a cargas dinámica no solamente depende de la máxima tensión
(máx ó máx) sino también de la uniformidad de distribución de las tensiones en todo el com-ponente.
La energía elástica absorbida por la unidad de volumen para tensión normal y de corte es:
E2u
2
ó
G2u
2
Consecuentemente la resistencia depende del grado en que cada partícula del volumen esté tensionada. El cuerpo absorberá una cantidad máxima de energía cuando todas sus partículas estén sometidas a la máxima tensión permitida por el tipo de material y de acuerdo al tipo de solicitación.
Cuanto mayor sea la cantidad de masa del cuerpo que se encuentra tensionada al máximo permitido, más energía habrá almacenado.
Tener en cuenta además que en componentes sometidos a cargas dinámicas deben evi-tarse los cambios bruscos de sección y en general cualquier tipo de concentradores de ten-sión, especialmente si se trata de material frágil.
Aún para los materiales dúctiles, la concentración de tensión localizada origina valores muy altos de la energía que absorbe cada partícula en dichos lugares, lo que puede originar que la fractura se produzca antes que la energía (y por lo tanto el esfuerzo) alcance a propa-garse a otras partes del componente.
Con los siguientes ejemplos se pretende mostrar la importancia que tiene la forma de un componente en su capacidad resistente a cargas dinámicas, como así la diferencia en el comportamiento mecánico frente a carga estática.
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 12 -
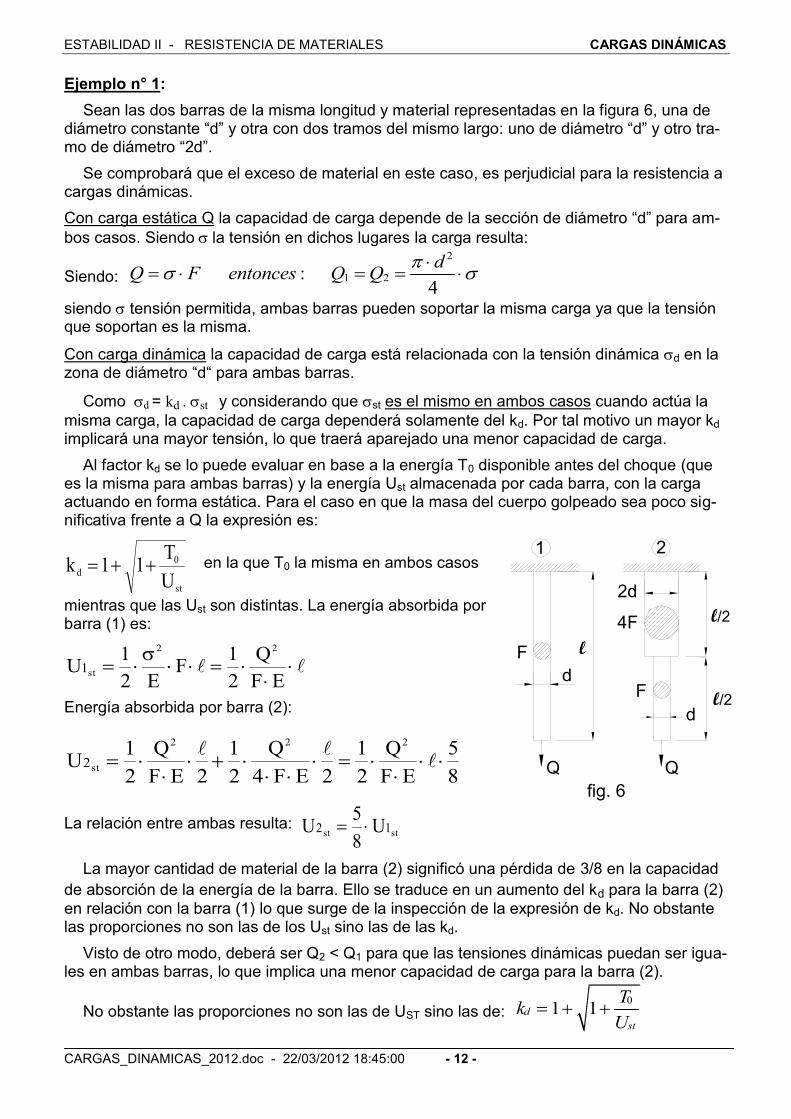
Ejemplo n° 1:
Sean las dos barras de la misma longitud y material representadas en la figura 6, una de diámetro constante “d” y otra con dos tramos del mismo largo: uno de diámetro “d” y otro tra-mo de diámetro “2d”.
Se comprobará que el exceso de material en este caso, es perjudicial para la resistencia a cargas dinámicas.
Con carga estática Q la capacidad de carga depende de la sección de diámetro “d” para am-
bos casos. Siendo la tensión en dichos lugares la carga resulta:
Siendo:
2
1 2:4
dQ F entonces Q Q
siendo tensión permitida, ambas barras pueden soportar la misma carga ya que la tensión que soportan es la misma.
Con carga dinámica la capacidad de carga está relacionada con la tensión dinámica d en la zona de diámetro “d“ para ambas barras.
Como d = kd . st y considerando que st es el mismo en ambos casos cuando actúa la
misma carga, la capacidad de carga dependerá solamente del kd. Por tal motivo un mayor kd implicará una mayor tensión, lo que traerá aparejado una menor capacidad de carga.
Al factor kd se lo puede evaluar en base a la energía T0 disponible antes del choque (que es la misma para ambas barras) y la energía Ust almacenada por cada barra, con la carga actuando en forma estática. Para el caso en que la masa del cuerpo golpeado sea poco sig-nificativa frente a Q la expresión es:
st
0
dU
T11k en la que T0 la misma en ambos casos
mientras que las Ust son distintas. La energía absorbida por barra (1) es:
EF
Q
2
1F
E2
1U
22
st1
Energía absorbida por barra (2):
8
5
EF
Q
2
1
2EF4
Q
2
1
2EF
Q
2
1U
222
st2
La relación entre ambas resulta: stst 12 U
8
5U
La mayor cantidad de material de la barra (2) significó una pérdida de 3/8 en la capacidad
de absorción de la energía de la barra. Ello se traduce en un aumento del kd para la barra (2)
en relación con la barra (1) lo que surge de la inspección de la expresión de kd. No obstante las proporciones no son las de los Ust sino las de las kd.
Visto de otro modo, deberá ser Q2 < Q1 para que las tensiones dinámicas puedan ser igua-les en ambas barras, lo que implica una menor capacidad de carga para la barra (2).
No obstante las proporciones no son las de UST sino las de: 0
1 1d
st
Tk
U
fig. 6
l
d
2d
dl/2
l/2
Q
1 2
F
F
4F
Q
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 13 -
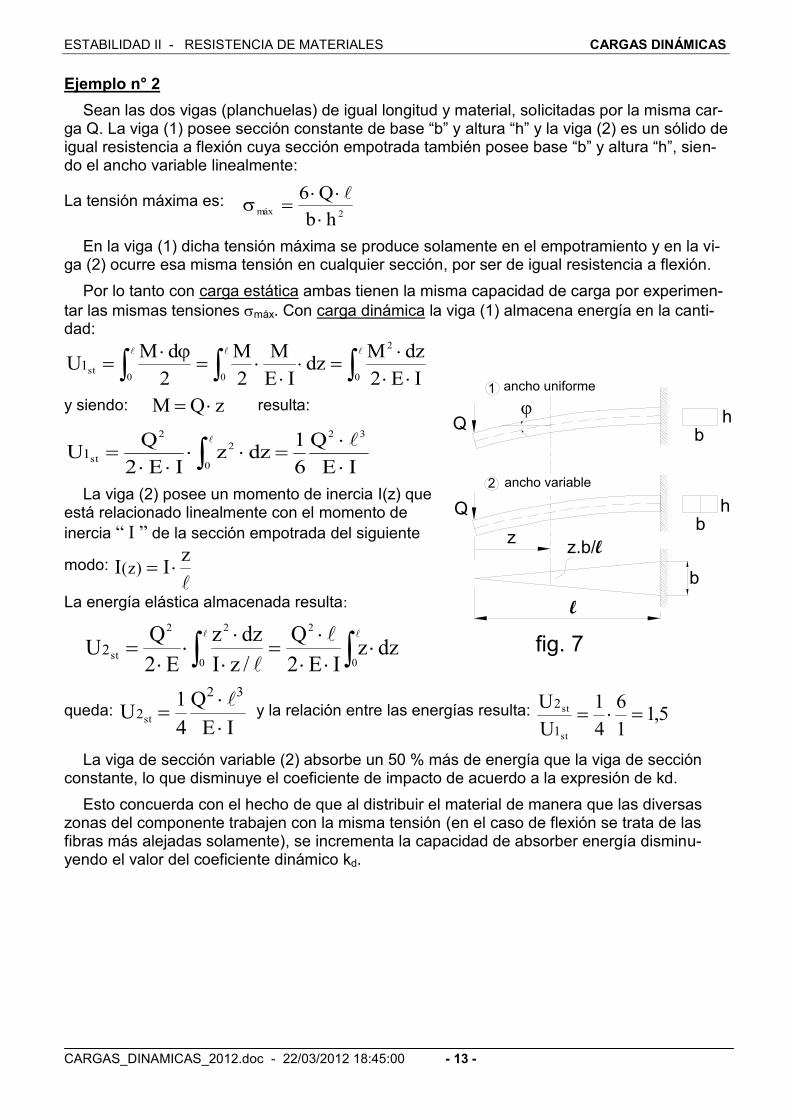
Ejemplo n° 2
Sean las dos vigas (planchuelas) de igual longitud y material, solicitadas por la misma car-ga Q. La viga (1) posee sección constante de base “b” y altura “h” y la viga (2) es un sólido de igual resistencia a flexión cuya sección empotrada también posee base “b” y altura “h”, sien-do el ancho variable linealmente:
La tensión máxima es: 2máx
hb
Q6
En la viga (1) dicha tensión máxima se produce solamente en el empotramiento y en la vi-ga (2) ocurre esa misma tensión en cualquier sección, por ser de igual resistencia a flexión.
Por lo tanto con carga estática ambas tienen la misma capacidad de carga por experimen-
tar las mismas tensiones máx. Con carga dinámica la viga (1) almacena energía en la canti-dad:
0 0 0
2
stIE2
dzMdz
IE
M
2
M
2
dMU1
y siendo: zQM resulta:
IE
Q
6
1dzz
IE2
QU
32
0
2
2
st1
La viga (2) posee un momento de inercia I(z) que está relacionado linealmente con el momento de
inercia “ I ” de la sección empotrada del siguiente
modo:
zII )z(
La energía elástica almacenada resulta:
0
2
0
22
st dzzIE2
Q
/zI
dzz
E2
QU2
queda:
IE
Q
4
1U
32
2st
y la relación entre las energías resulta: 5,1
1
6
4
1
U
U
st
st
1
2
La viga de sección variable (2) absorbe un 50 % más de energía que la viga de sección constante, lo que disminuye el coeficiente de impacto de acuerdo a la expresión de kd.
Esto concuerda con el hecho de que al distribuir el material de manera que las diversas zonas del componente trabajen con la misma tensión (en el caso de flexión se trata de las fibras más alejadas solamente), se incrementa la capacidad de absorber energía disminu-yendo el valor del coeficiente dinámico kd.
bhQ
bh
1
Q
2
ancho uniforme
z.b/l
ancho variable
b
z
l
fig. 7
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 14 -
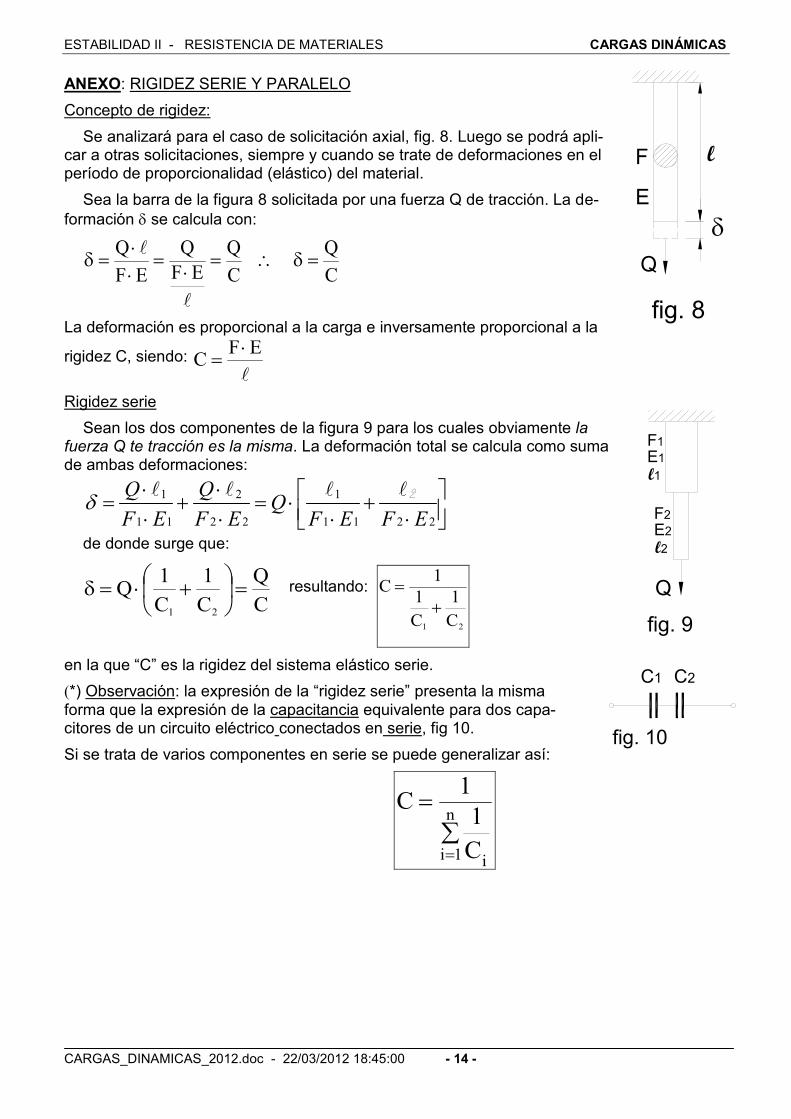
ANEXO: RIGIDEZ SERIE Y PARALELO
Concepto de rigidez:
Se analizará para el caso de solicitación axial, fig. 8. Luego se podrá apli-car a otras solicitaciones, siempre y cuando se trate de deformaciones en el período de proporcionalidad (elástico) del material.
Sea la barra de la figura 8 solicitada por una fuerza Q de tracción. La de-
formación se calcula con:
C
Q
C
Q
EF
Q
EF
Q
La deformación es proporcional a la carga e inversamente proporcional a la
rigidez C, siendo:
EFC
Rigidez serie
Sean los dos componentes de la figura 9 para los cuales obviamente la fuerza Q te tracción es la misma. La deformación total se calcula como suma de ambas deformaciones:
1 2 1
1 1 2 2 1 1 2 2
Q QQ
F E F E F E F E
2
de donde surge que:
C
Q
C
1
C
1Q
21
resultando:
21 C
1
C
1
1C
en la que “C” es la rigidez del sistema elástico serie.
(*) Observación: la expresión de la “rigidez serie” presenta la misma forma que la expresión de la capacitancia equivalente para dos capa-citores de un circuito eléctrico conectados en serie, fig 10.
Si se trata de varios componentes en serie se puede generalizar así:
n
1i iC
1
1C
Q
F
E
fig. 8
l
Q
F1
E1
l1
F2
E2
l2
fig. 9
C1 C2
fig. 10
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 15 -
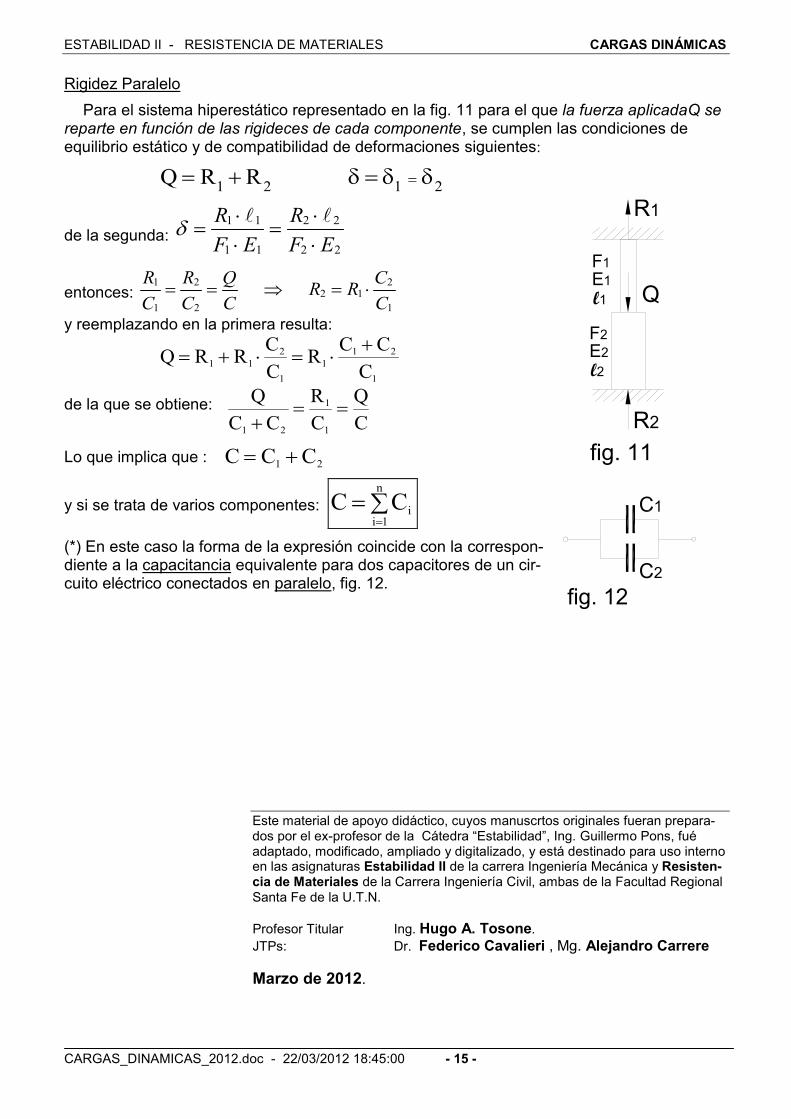
Rigidez Paralelo
Para el sistema hiperestático representado en la fig. 11 para el que la fuerza aplicadaQ se reparte en función de las rigideces de cada componente, se cumplen las condiciones de equilibrio estático y de compatibilidad de deformaciones siguientes:
21RRQ
21
de la segunda: 1 1 2 2
1 1 2 2
R R
F E F E
entonces: 1 2 2
2 1
1 2 1
R R Q CR R
C C C C
y reemplazando en la primera resulta:
1
21
1
1
2
11
C
CCR
C
CRRQ
de la que se obtiene:
C
Q
C
R
CC
Q
1
1
21
Lo que implica que : 21 CCC
y si se trata de varios componentes:
n
1iiCC
(*) En este caso la forma de la expresión coincide con la correspon-diente a la capacitancia equivalente para dos capacitores de un cir-cuito eléctrico conectados en paralelo, fig. 12.
Este material de apoyo didáctico, cuyos manuscrtos originales fueran prepara-dos por el ex-profesor de la Cátedra “Estabilidad”, Ing. Guillermo Pons, fué adaptado, modificado, ampliado y digitalizado, y está destinado para uso interno en las asignaturas Estabilidad II de la carrera Ingeniería Mecánica y Resisten-cia de Materiales de la Carrera Ingeniería Civil, ambas de la Facultad Regional Santa Fe de la U.T.N.
Profesor Titular Ing. Hugo A. Tosone.
JTPs: Dr. Federico Cavalieri , Mg. Alejandro Carrere
Marzo de 2012.
E2
l2
F2
F1
E1
l1
R1
R2
Q
fig. 11
C2
1
fig. 12

ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 16 -
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 17 -
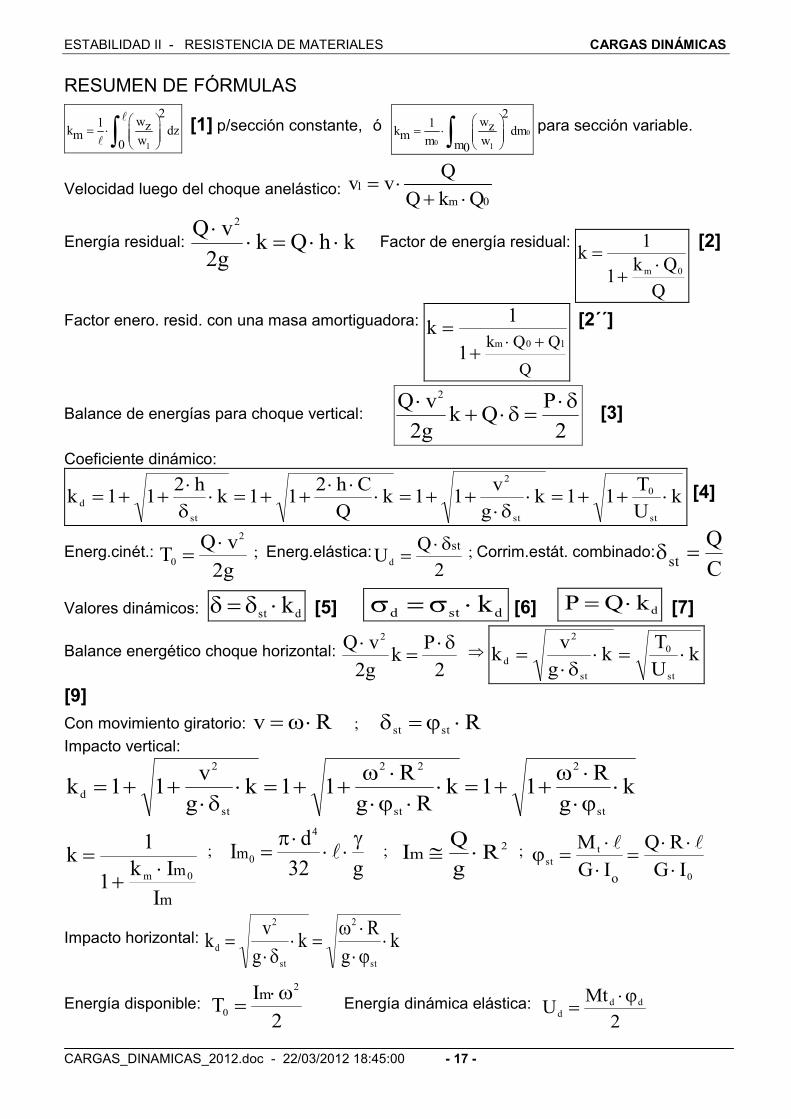
RESUMEN DE FÓRMULAS
1
2w1 zk dzm w0
[1] p/sección constante, ó
0
01
2w1 zk dmm m wm0
para sección variable.
Velocidad luego del choque anelástico: 1
m 0
Qv v
Q k Q
Energía residual: khQkg2
vQ 2
Factor de energía residual:
Q
Qk1
1k
0m
[2]
Factor enero. resid. con una masa amortiguadora:
Q
QQk 10m
1
1k
[2´´]
Balance de energías para choque vertical: 2
PQk
g2
vQ 2
[3]
Coeficiente dinámico:
kU
T11k
g
v11k
Q
Ch211k
h211k
st
0
st
2
st
d
[4]
Energ.cinét.:
g2
vQT
2
0
; Energ.elástica:
2
QU
st
d
; Corrim.estát. combinado:
C
Qst
Valores dinámicos: dst k [5] dstd k [6] dkQP [7]
Balance energético choque horizontal:
2
Pk
g2
vQ 2
k
U
Tk
g
vk
st
0
st
2
d
[9]
Con movimiento giratorio: Rv ; Rstst
Impacto vertical:
kg
R11k
Rg
R11k
g
v11k
st
2
st
22
st
2
d
m
m
I
Ik1
1k
0m
;
g32
dI
4
0m
; 2R
g
QIm ;
0
t
stIG
RQ
IG
M
o
Impacto horizontal: kg
Rk
g
vk
st
2
st
2
d
Energía disponible:
2
IT
2
0
m Energía dinámica elástica:
2
MtU dd
d
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 18 -
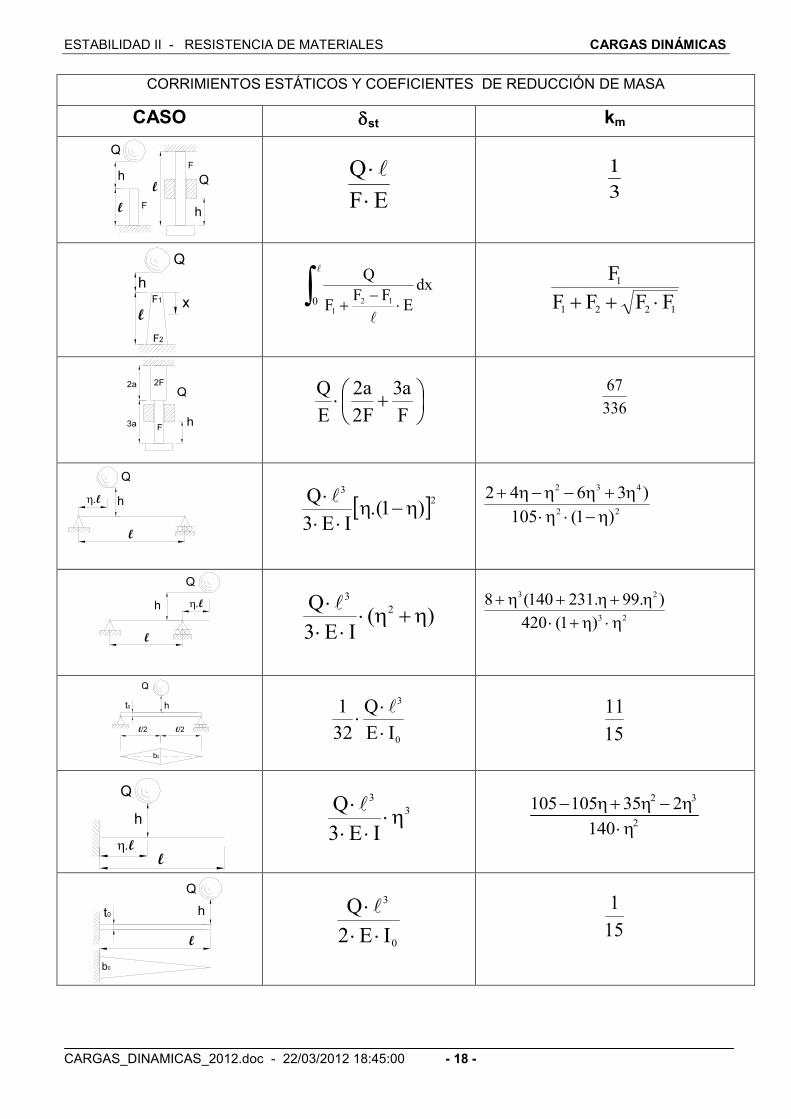
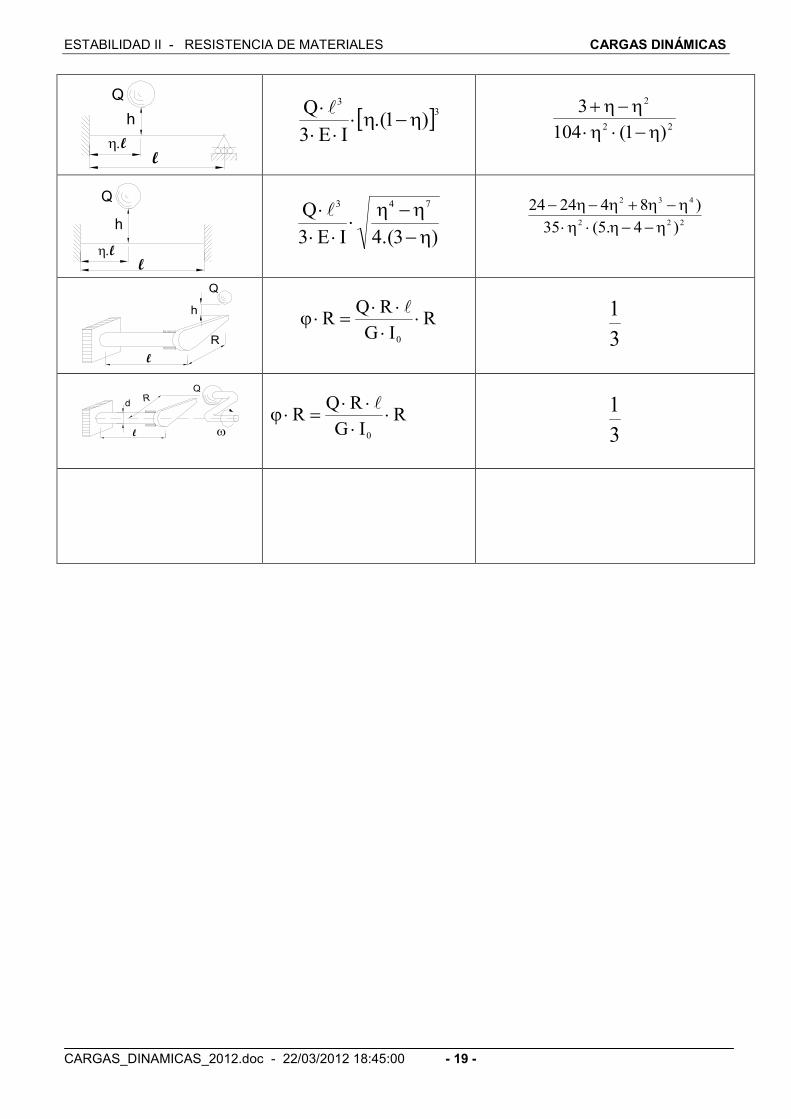
CORRIMIENTOS ESTÁTICOS Y COEFICIENTES DE REDUCCIÓN DE MASA
CASO st km
Q
F
F
Q
h
h
l
l
EF
Q
3
1
x
Q
F1
F2
h
l
0
dx
EFF
F
Q
12
1
1221
1
FFFF
F
Q
h
2F
F
2a
3a
F
a3
F2
a2
E
Q
336
67
Q
l h
l
23
)1.(IE3
Q
22
432
)1(105
)3642
Q
lh
l
)(IE3
Q 2
3
23
23
)1(420
).99.231140(8
Q
h
l/2 l/2
t0
b0
0
3
IE
Q
32
1
15
11
Q
l
h
l
3
3
IE3
Q
2 3
2
105 105 35 2
140
b0
t0
Q
h
l
0
3
IE2
Q
15
1
ESTABILIDAD II - RESISTENCIA DE MATERIALES CARGAS DINÁMICAS
CARGAS_DINAMICAS_2012.doc - 22/03/2012 18:45:00 - 19 -
Q
l
h
l
33
)1.(IE3
Q
22
2
)1(104
3
Q
l
h
l
)3.(4IE3
Q 743
222
432
)4.5(35
)842424
Q
h
R
l
RIG
RQR
0
3
1
dR
l
RIG
RQR
0
3
1
Related Documents











