Teori Dasar Motor Listrik Posted on Maret 15, 2010 by Hasrul Bakri Pendahuluan Telah dikatakan bahwa jika orang Romawi Kuno, dengan peradaban maju dan pengetahuan tentang ilmu pengetahuan, telah mampu mengembangkan sebuah motor uap, perjalanan sejarah akan jauh berbeda. Perkembangan motor listrik di zaman modern telah menunjukkan kebenaran dalam teori ini. Perkembangan motor listrik telah memberi kita yang paling efisien dan efektif untuk melakukan kerja berarti dikenal manusia. Karena motor listrik telah kita dapat sungguh- sungguh sangat mengurangi kerja keras kelangsungan hidup manusia dan telah mampu membangun peradaban yang sekarang sampai ke bintang-bintang. Motor listrik perangkat sederhana pada prinsipnya. Aplikasi ini dapat mengkonversi energi listrik menjadi energi mekanik. Selama bertahun-tahun, motor listrik telah berubah secara substansial dalam desain, namun prinsip-prinsip dasar tetap sama. Dalam bagian ini, Panduan Aksi kita akan membahas prinsip-prinsip dasar ini motor. Kita akan membahas fenomena magnetisme, AC arus dan dasar operasi motor. Magnetisme Sekarang, sebelum kita membahas operasi motor dasar review singkat magnet mungkin bermanfaat bagi banyak dari kita. Kita semua tahu bahwa sebuah magnet permanen akan menarik dan memegang benda logam ketika objek itu sudah dekat atau bersentuhan dengan magnet. Magnet permanen dapat melakukan hal ini karena gaya magnet yang melekat disebut sebagai “medan magnet”. Dalam Gambar 1, medan magnet dua magnet permanen yang diwakili oleh “garis-garis fluks”. Garis-garis fluks ini membantu kita untuk memvisualisasikan medan magnet magnet apapun walaupun mereka hanya mewakili fenomena yang tak terlihat. Jumlah garis fluks magnet bervariasi dari satu bidang ke bidang lainnya. Semakin kuat medan magnet, semakin besar jumlah garis fluks yang ditarik untuk mewakili medan magnet. Garis-garis fluks yang digambar dengan arah yang ditunjukkan karena kita harus memvisualisasikan garis-garis ini dan medan magnet yang mereka wakili sebagai memiliki gerakan yang berbeda dari N-tiang ke S-tiang seperti yang ditunjukkan pada Gambar 1. Lain tapi sejenis medan magnet yang dihasilkan sekitar konduktor listrik bila arus listrik mengalir melalui konduktor seperti ditunjukkan pada Gambar 2-a. Baris ini mendefinisikan fluks dan medan magnet dalam bentuk lingkaran konsentris di sekitar kawat. Beberapa dari Anda mungkin ingat lama “Waktu Hand Rule” seperti yang ditunjukkan pada Gambar 2 -b. Aturan menyatakan bahwa jika Anda mengarahkan jempol tangan kiri Anda ke arah arus, jari-jari anda akan menunjuk ke arah medan magnet.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 1/43
Teori Dasar Motor Listrik
Posted on Maret 15, 2010 by Hasrul Bakri
Pendahuluan
Telah dikatakan bahwa jika orang Romawi Kuno, dengan peradaban maju dan pengetahuan
tentang ilmu pengetahuan, telah mampu mengembangkan sebuah motor uap, perjalanan sejarahakan jauh berbeda. Perkembangan motor listrik di zaman modern telah menunjukkan kebenaran
dalam teori ini. Perkembangan motor listrik telah memberi kita yang paling efisien dan efektif
untuk melakukan kerja berarti dikenal manusia. Karena motor listrik telah kita dapat sungguh-sungguh sangat mengurangi kerja keras kelangsungan hidup manusia dan telah mampu
membangun peradaban yang sekarang sampai ke bintang-bintang. Motor listrik perangkat
sederhana pada prinsipnya. Aplikasi ini dapat mengkonversi energi listrik menjadi energi
mekanik. Selama bertahun-tahun, motor listrik telah berubah secara substansial dalam desain,namun prinsip-prinsip dasar tetap sama. Dalam bagian ini, Panduan Aksi kita akan membahas
prinsip-prinsip dasar ini motor. Kita akan membahas fenomena magnetisme, AC arus dan dasaroperasi motor.
Magnetisme
Sekarang, sebelum kita membahas operasi motor dasar review singkat magnet mungkin
bermanfaat bagi banyak dari kita. Kita semua tahu bahwa sebuah magnet permanen akan
menarik dan memegang benda logam ketika objek itu sudah dekat atau bersentuhan denganmagnet. Magnet permanen dapat melakukan hal ini karena gaya magnet yang melekat disebut
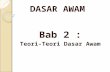
sebagai “medan magnet”. Dalam Gambar 1, medan magnet dua magnet permanen yang diwakili
oleh “garis-garis fluks”. Garis-garis fluks ini membantu kita untuk memvisualisasikan medan
magnet magnet apapun walaupun mereka hanya mewakili fenomena yang tak terlihat. Jumlahgaris fluks magnet bervariasi dari satu bidang ke bidang lainnya. Semakin kuat medan magnet,
semakin besar jumlah garis fluks yang ditarik untuk mewakili medan magnet. Garis-garis fluks
yang digambar dengan arah yang ditunjukkan karena kita harus memvisualisasikan garis-garisini dan medan magnet yang mereka wakili sebagai memiliki gerakan yang berbeda dari N-tiang
ke S-tiang seperti yang ditunjukkan pada Gambar 1. Lain tapi sejenis medan magnet yang
dihasilkan sekitar konduktor listrik bila arus listrik mengalir melalui konduktor sepertiditunjukkan pada Gambar 2-a. Baris ini mendefinisikan fluks dan medan magnet dalam bentuk
lingkaran konsentris di sekitar kawat. Beberapa dari Anda mungkin ingat lama “Waktu Hand
Rule” seperti yang ditunjukkan pada Gambar 2-b. Aturan menyatakan bahwa jika Anda
mengarahkan jempol tangan kiri Anda ke arah arus, jari-jari anda akan menunjuk ke arah medan
magnet.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 2/43
Gambar 1 – Garis-garis fluks dari medan magnet perjalanan dari N-tiang ke S-tiang.
Gambar 2 – Aliran arus listrik dalam suatu konduktor konsentris set up garis fluks magnet di
sekitar konduktor.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 3/43
Gambar 3 – garis magnet di sekitar konduktor arus berangkat dari N-
tiang dan re-enter pada S-tiang.
Ketika kawat dibentuk menjadi sebuah kumparan seperti yang ditunjukkan pada Gambar 3 ini,semua individu garis-garis fluks yang dihasilkan oleh setiap bagian dari kawat bergabung
bersama untuk membentuk satu medan magnet yang besar sekitar total koil. Seperti halnya
dengan magnet permanen, garis-garis fluks ini meninggalkan utara kumparan dan masukkankembali pada bagian kumparan kutub selatan. Medan magnet dari kumparan kawat jauh lebih
besar dan lebih terlokalisasi dibandingkan dengan medan magnet di sekitar konduktor biasa
sebelum dibentuk menjadi sebuah kumparan. Ini medan magnet di sekitar kumparan dapatdiperkuat dengan menempatkan lebih inti dari besi atau logam serupa di pusat inti. Menyajikan
inti logam kurang perlawanan terhadap garis-garis fluks daripada udara, sehingga menyebabkan
kekuatan lapangan meningkat. (Ini adalah persis bagaimana kumparan stator dibuat; sebuah
kumparan kawat dengan inti besi.) Keuntungan dari medan magnet yang dihasilkan oleh aruskumparan kawat adalah bahwa ketika arus dibalik arah kutub yang medan magnet akan beralih
posisi sejak garis-garis fluks telah berubah arah. Fenomena ini diilustrasikan pada Gambar 4.
Tanpa magnet ini fenomena yang ada, motor AC seperti yang kita kenal sekarang tidak akan ada.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 4/43
Gambar 4 – The kutub dari sebuah elektro-magnetik kumparan berubah ketika arah aliran arus
perubahan.
Prinsip dasar dari semua motor dapat dengan mudah ditampilkan dengan menggunakan duaelektromagnet dan magnet permanen. Arus mengalir melalui koil no. 1 dalam arah yang seperti
kutub utara dibentuk dan melalui koil no. 2 dalam arah yang seperti kutub selatan didirikan.
Permanen magnet dengan kutub utara dan selatan merupakan bagian yang bergerak sederhana inimotor. Pada Gambar 5-sebuah kutub utara magnet permanen berlawanan kutub utara dari
elektromagnet. Demikian pula, kutub selatan saling berlawanan. Seperti kutub magnet saling
tolak, menyebabkan magnet permanen bergerak untuk mulai berbelok. Setelah ternyata bagian
jalan sekitar, gaya tarik-menarik antara kutub berbeda menjadi cukup kuat untuk menjagamagnet permanen berputar. Magnet yang berputar terus memutar sampai kutub tidak seperti
berbaris. Pada titik ini biasanya rotor berhenti karena tarik-menarik antara kutub berbeda.
(Gambar 5-b)
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 5/43
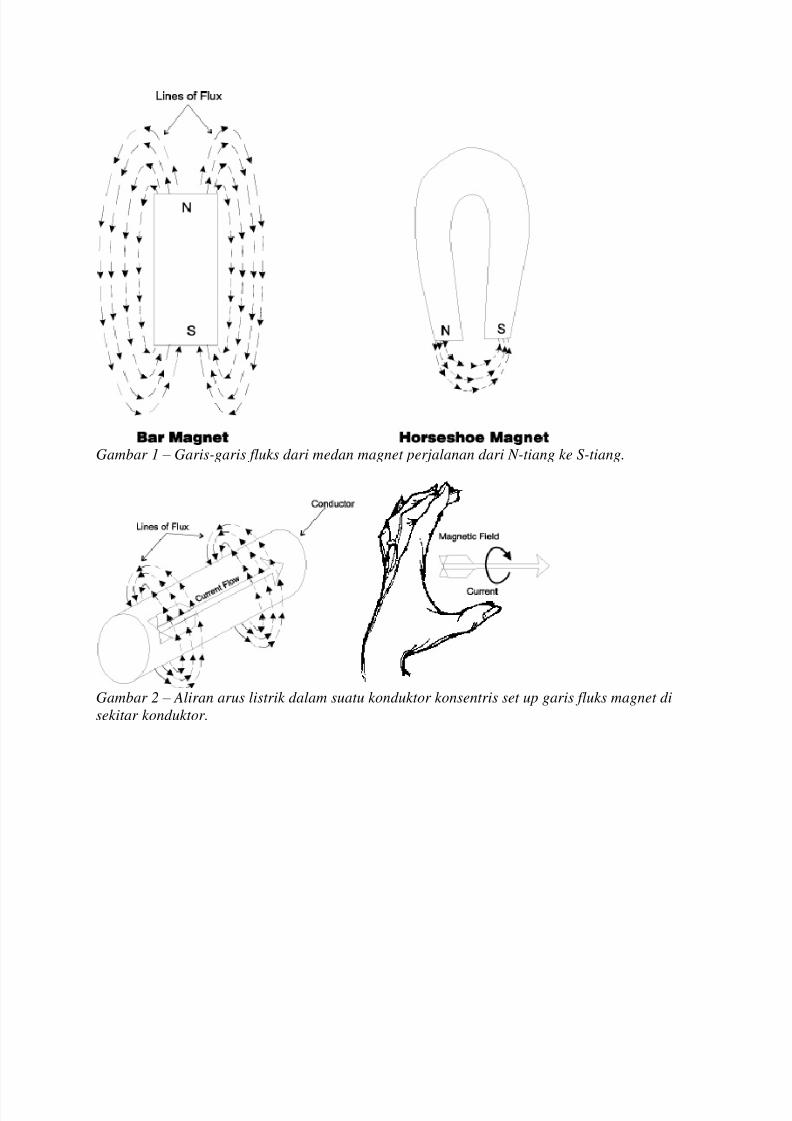
Gambar 5
Namun, jika arah arus dalam kumparan elektromagnetik tiba-tiba terbalik, sehingga membalik
polaritas dari dua kumparan, maka akan kembali kutub berlawanan dan saling tolak. (Gambar 5-
c). Magnet permanen yang bergerak kemudian akan terus berputar. Jika arah arus dalamkumparan elektromagnetik berubah setiap kali magnet berubah 180 derajat atau setengah
keliling, maka magnet akan terus berputar. Perangkat sederhana ini motor dalam bentuk yang
paling sederhana. Motor sebenarnya lebih kompleks daripada perangkat sederhana yang
ditunjukkan di atas, tetapi prinsipnya sama.
AC Current
Bagaimana dibalik arus dalam kumparan sehingga mengubah polaritas kumparan, Anda
bertanya. Yah, seperti yang mungkin Anda ketahui, perbedaan antara DC dan AC adalah bahwa
dengan arus DC hanya mengalir dalam satu arah sementara dengan AC arah aliran arusperubahan secara berkala. Dalam kasus AC umum yang digunakan di sebagian besar dari
Amerika Serikat, perubahan arah aliran arus 120 kali setiap detik. Arus ini disebut sebagai “60
siklus AC” atau “60 Hertz AC” untuk menghormati Mr Hertz yang pertama kali dikandungkonsep arus AC. Karakteristik lain aliran arus adalah bahwa hal itu dapat bervariasi dalam
kuantitas. Kita dapat memiliki 5 amp, 10 amp atau 100 ampli aliran misalnya. Murni DC, ini
berarti bahwa aliran arus sebenarnya adalah 5,10, atau 100 ampli secara terus-menerus. Kita bisa
membayangkan sederhana ini pada waktu-arus grafik dengan garis lurus seperti yangditunjukkan pada Gambar 6.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 6/43
Gambar 6 – Visualisasi dari DC
Tapi dengan AC itu berbeda. Seperti yang dapat Anda bayangkan, akan lebih sulit bagi arus akan
mengalir di misalnya 100 amp arah yang positif satu waktu dan kemudian pada saat berikutnya
akan mengalir pada intensitas yang sama ke arah negatif. Sebaliknya, karena saat ini sudah siapuntuk mengubah arah, pertama kali mengecil dari nol sampai mencapai aliran dan kemudian
secara bertahap membangun di arah lain. Lihat Gambar 7. Perhatikan bahwa arus maksimum
(puncak garis) di setiap arah adalah lebih dari nilai tertentu (100 amp dalam kasus ini). Olehkarena itu, nilai tertentu diberikan sebagai rata-rata. Hal ini sebenarnya disebut sebagai “rootmean square” nilai, tapi jangan khawatir tentang mengingat ini karena itu adalah tidak penting
bagi kita saat ini. Apa yang penting dalam studi kami motor, adalah menyadari bahwa kekuatanmedan magnet yang dihasilkan oleh AC elektro-magnetik kumparan bertambah dan berkurang
dengan peningkatan dan penurunan aliran arus bolak-balik ini.
Figure 7 – Visualization of AC.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 7/43
Motor AC listrik dasar memiliki dua bagian: “stator” dan “rotor” seperti ditunjukkan pada
Gambar 8. Stator adalah komponen listrik stasioner. Ini terdiri dari sekelompok individu elektro-magnet diatur sedemikian rupa sehingga membentuk sebuah lubang silinder, dengan masing-
masing satu kutub magnet menghadap ke arah pusat kelompok. Istilah, “stator” berasal dari kata
stasioner. Kemudian stator adalah bagian stasioner motor. Rotor merupakan komponen listrik
berputar. Ini juga terdiri dari sekelompok elektro-magnet diatur mengelilingi sebuah silinder,dengan menghadap ke arah kutub kutub stator. Rotor, jelas, terletak di dalam stator dan dipasang
pada poros motor. Istilah “rotor” berasal dar i kata berputar. Maka rotor adalah bagian yang
berputar dari motor. Tujuan dari komponen motor ini adalah untuk membuat rotor berputar yangpada gilirannya akan memutar poros motor. Rotasi ini akan terjadi karena magnet yang telah
dibahas sebelumnya fenomena yang tidak seperti kutub magnet saling menarik satu sama lain
dan seperti kutub mengusir. Jika kita semakin mengubah polaritas kutub stator sedemikian rupasehingga mereka gabungan medan magnet berputar, maka rotor akan mengikuti dan memutar
dengan medan magnet stator.
Gambar 8 –
dasar komponen listrik motor AC.
Ini “medan magnet berputar stator dapat lebih dipahami dengan mengkaji Gambar 9. Seperti
terlihat, stator magnet memiliki enam tiang dan rotor memiliki dua kutub. Pada waktu 1, stator
kutub A-1 dan C-2 adalah kutub utara dan kutub yang berlawanan, A-2 dan C-1, adalah kutubselatan. S-tiang rotor tertarik oleh dua N-kutub stator dan N-kutub rotor tertarik oleh dua kutub
selatan stator. Pada waktu 2, polaritas kutub stator berubah sehingga sekarang C-2 dan B-1 dan
N-tiang dan C-1 dan B-2 adalah S-kutub. Rotor kemudian dipaksa untuk memutar 60 derajatuntuk berbaris dengan kutub stator sebagaimana ditunjukkan. Pada waktu 3, B-1 dan A-2 adalah
N. Pada saat 4, A-2 dan C-1 adalah N. Seperti setiap perubahan yang dibuat, kutub rotor tertarik
oleh yang berlawanan kutub pada stator. Jadi, sebagai medan magnet stator berputar, rotor
dipaksa untuk memutar dengan itu.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 8/43
Gambar 9
– medan magnet berputar motor AC.
Salah satu cara untuk menghasilkan medan magnet yang berputar di dalam stator dari motor AC
adalah dengan menggunakan tiga fase catu daya untuk kumparan stator. Apa, Anda mungkin
bertanya, adalah tiga-phase power? Jawaban untuk pertanyaan itu dapat lebih dipahami jika kitamemeriksa daya fase tunggal. Gambar 7 adalah visualisasi tunggal-phase power. Generator AC
yang terkait memproduksi hanya satu aliran arus listrik yang arah dan intensitas yang bervariasi
seperti ditunjukkan oleh garis solid tunggal pada grafik. Dari waktu 0 ke waktu 3, arus mengalir
dalam konduktor dalam arah positif. Dari waktu 3 sampai waktu 6, arus mengalir dalam negatif.Pada suatu waktu, saat ini hanya mengalir dalam satu arah. Tetapi beberapa generator
menghasilkan tiga terpisah arus mengalir (fase) semua ditumpangkan pada jaringan yang sama.
Hal ini disebut sebagai fase tiga daya. Pada satu instan, bagaimanapun, arah dan intensitas darimasing-masing terpisah arus tidak sama dengan fase-fase lain. Hal ini diilustrasikan pada
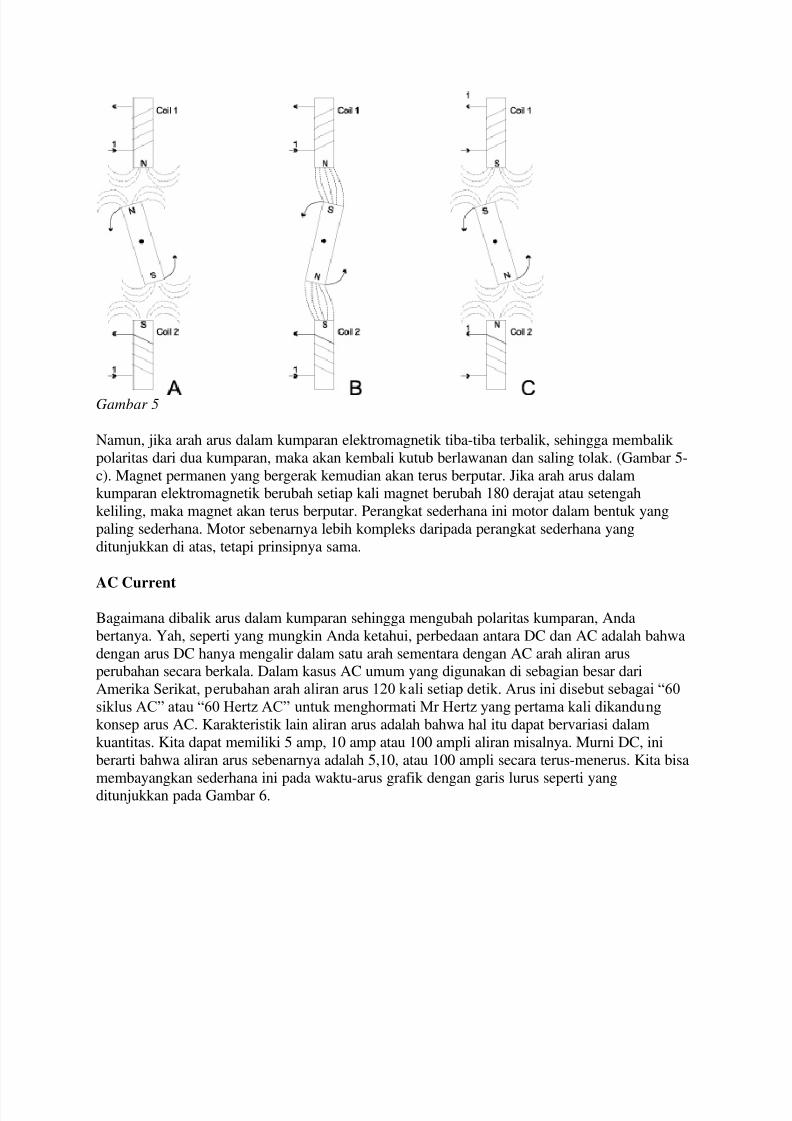
Gambar 10. Tiga fase terpisah (arus mengalir) diberi label A, B dan C. Pada waktu 1, fasa A
adalah nol ampli, fase B adalah dekat maksimum ampere dan mengalir dalam arah positif, dan
fase C sudah dekat secara maksimal ampere tapi mengalir ke arah negatif. Pada saat 2, amperefasa A adalah meningkatkan dan aliran positif, fase B ampere menurun dan aliran masih negatif,
dan fasa C telah turun menjadi nol amp. Siklus lengkap (dari nol sampai maksimum dalam satu
arah, ke nol dan maksimum dalam arah lain, dan kembali ke nol) diperlukan satu revolusilengkap dari generator. Oleh karena itu, siklus lengkap, dikatakan telah listrik 360 derajat. Dalam
meneliti Gambar 10, kita melihat bahwa setiap fase tersebut dipindahkan 120 derajat dari dua
fase lain. Oleh karena itu, kita katakan mereka 120 derajat keluar dari fase.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 9/43
Gambar 10 – Pola fase yang terpisah tiga-phase power.
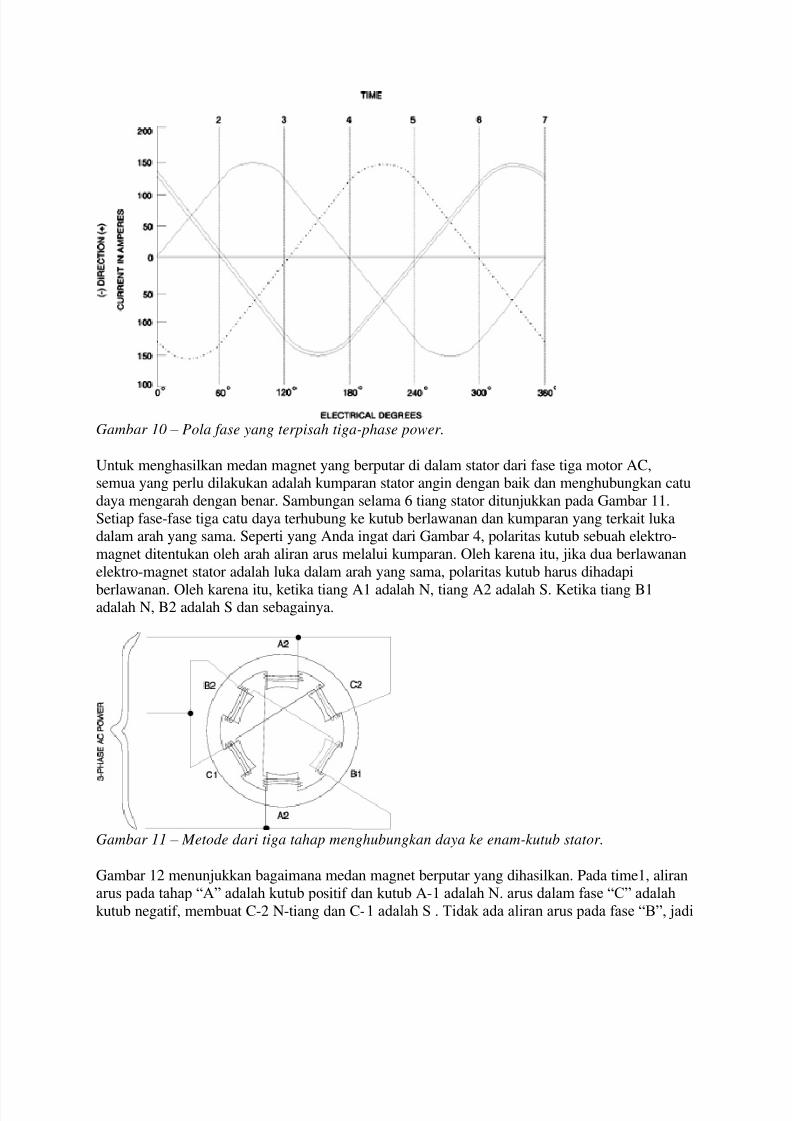
Untuk menghasilkan medan magnet yang berputar di dalam stator dari fase tiga motor AC,semua yang perlu dilakukan adalah kumparan stator angin dengan baik dan menghubungkan catu
daya mengarah dengan benar. Sambungan selama 6 tiang stator ditunjukkan pada Gambar 11.
Setiap fase-fase tiga catu daya terhubung ke kutub berlawanan dan kumparan yang terkait lukadalam arah yang sama. Seperti yang Anda ingat dari Gambar 4, polaritas kutub sebuah elektro-
magnet ditentukan oleh arah aliran arus melalui kumparan. Oleh karena itu, jika dua berlawanan
elektro-magnet stator adalah luka dalam arah yang sama, polaritas kutub harus dihadapi
berlawanan. Oleh karena itu, ketika tiang A1 adalah N, tiang A2 adalah S. Ketika tiang B1adalah N, B2 adalah S dan sebagainya.
Gambar 11 – Metode dari tiga tahap menghubungkan daya ke enam-kutub stator.
Gambar 12 menunjukkan bagaimana medan magnet berputar yang dihasilkan. Pada time1, aliran
arus pada tahap “A” adalah kutub positif dan kutub A-1 adalah N. arus dalam fase “C” adalah
kutub negatif, membuat C-2 N-tiang dan C-1 adalah S . Tidak ada aliran arus pada fase “B”, jadi

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 10/43
ini tidak kutub magnet. Pada saat 2, fase telah bergeser 60 derajat, membuat tiang C-2 dan B-1
baik N dan C-1 dan B-2 keduanya S. Dengan demikian, sebagai fase pergeseran arus mereka,resultan N dan S kutub bergerak searah jarum jam sekitar stator, menghasilkan medan magnet
yang berputar. Rotor bertindak seperti sebuah bar magnet, sepanjang ditarik oleh medan magnet
yang berputar.
Gambar 12 – Bagaimana daya tiga fase menghasilkan medan magnet yang berputar.
Sampai saat ini tidak banyak yang telah dikatakan tentang rotor. Dalam contoh sebelumnya,telah diasumsikan rotor kutub yang luka dengan gulungan, sama seperti kutub stator, dan
disertakan dengan DC untuk menciptakan tetap polaritas kutub. Ini, dengan cara, adalah persisbagaimana motor AC sinkron bekerja. Namun, sebagian besar motor AC yang digunakan saat initidak sinkron motor. Sebaliknya, apa yang disebut “induksi” motor adalah workhorses industri.Jadi bagaimana adalah motor induksi berbeda? Perbedaan besar adalah cara yang saat ini dipasok
ke rotor. Ini bukan catu daya eksternal. Seperti yang Anda bayangkan dari nama motor, sebuahteknik induksi digunakan sebagai gantinya. Induksi adalah karakteristik lain dari magnetisme. Ini
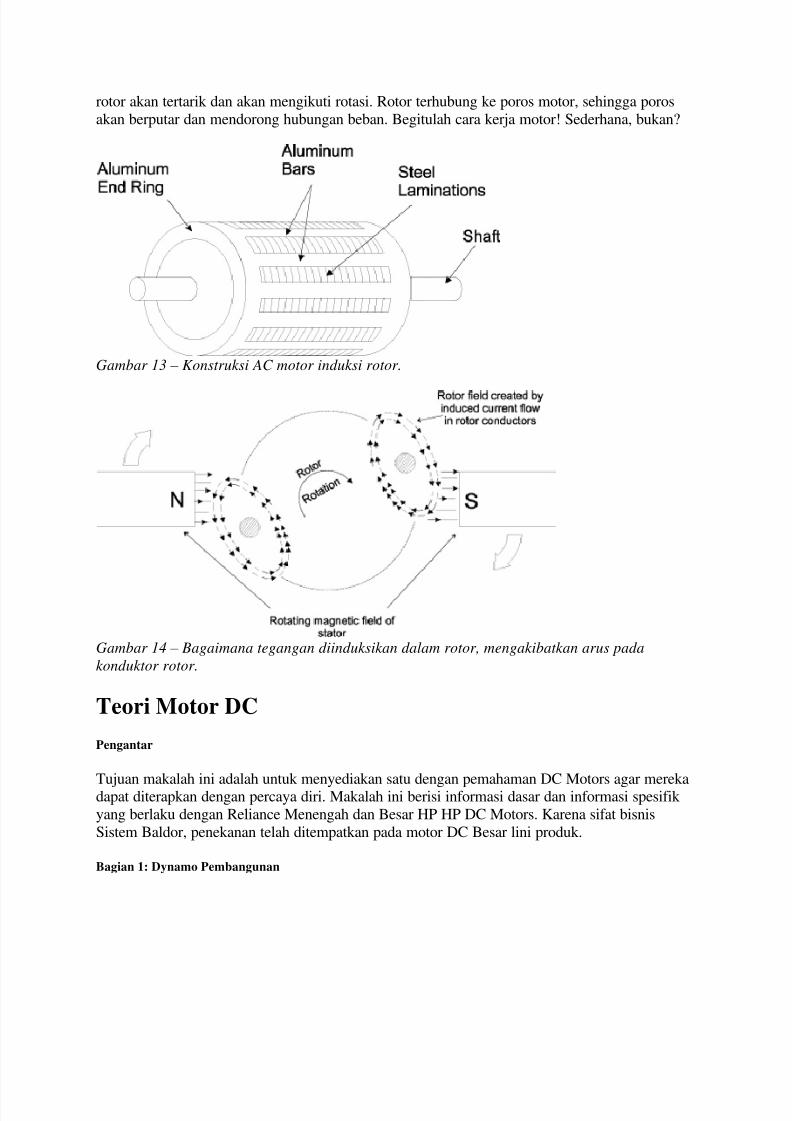
adalah fenomena alam yang terjadi ketika sebuah konduktor (aluminium batangan dalam kasus
rotor, lihat Figur 13) akan dipindahkan melalui medan magnet yang ada atau ketika medan
magnet melewati sebuah konduktor bergerak. Dalam kedua kasus, gerakan relatif dari dua
menyebabkan arus listrik mengalir dalam konduktor. Hal ini disebut sebagai “disebabkan” aliranarus. Dengan kata lain, dalam sebuah motor induksi aliran arus di rotor tidak disebabkan oleh
hubungan langsung ke konduktor ke sumber tegangan, melainkan oleh pengaruh konduktor rotor
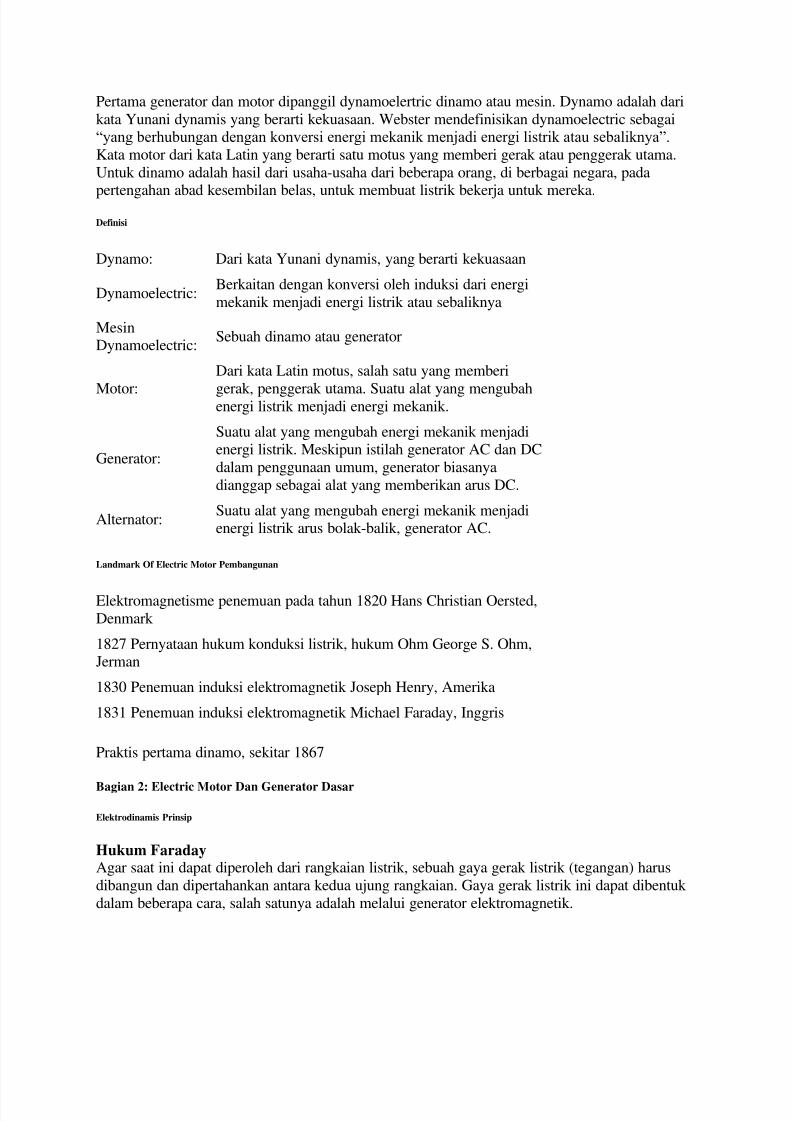
memotong garis-garis fluks yang dihasilkan oleh medan magnet stator . Arus induksi yangdihasilkan dalam rotor menghasilkan medan magnet di sekeliling konduktor rotor seperti yang
ditunjukkan pada Gambar 14. Ini medan magnet di setiap rotor konduktor akan menyebabkan
setiap rotor konduktor untuk bertindak seperti magnet permanen di Gambar 9 contoh. Sebagaimedan magnet stator berputar, karena efek dari tiga-fase catu daya AC, induksi medan magnet
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 11/43
rotor akan tertarik dan akan mengikuti rotasi. Rotor terhubung ke poros motor, sehingga poros
akan berputar dan mendorong hubungan beban. Begitulah cara kerja motor! Sederhana, bukan?
Gambar 13 – Konstruksi AC motor induksi rotor.
Gambar 14 – Bagaimana tegangan diinduksikan dalam rotor, mengakibatkan arus pada
konduktor rotor.
Teori Motor DC
Pengantar
Tujuan makalah ini adalah untuk menyediakan satu dengan pemahaman DC Motors agar merekadapat diterapkan dengan percaya diri. Makalah ini berisi informasi dasar dan informasi spesifik
yang berlaku dengan Reliance Menengah dan Besar HP HP DC Motors. Karena sifat bisnis
Sistem Baldor, penekanan telah ditempatkan pada motor DC Besar lini produk.
Bagian 1: Dynamo Pembangunan
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 12/43
Pertama generator dan motor dipanggil dynamoelertric dinamo atau mesin. Dynamo adalah dari
kata Yunani dynamis yang berarti kekuasaan. Webster mendefinisikan dynamoelectric sebagai
“yang berhubungan dengan konversi energi mekanik menjadi energi listrik atau sebaliknya”.Kata motor dari kata Latin yang berarti satu motus yang memberi gerak atau penggerak utama.
Untuk dinamo adalah hasil dari usaha-usaha dari beberapa orang, di berbagai negara, pada
pertengahan abad kesembilan belas, untuk membuat listrik bekerja untuk mereka.
Definisi
Dynamo: Dari kata Yunani dynamis, yang berarti kekuasaan
Dynamoelectric:Berkaitan dengan konversi oleh induksi dari energi
mekanik menjadi energi listrik atau sebaliknya
MesinDynamoelectric:
Sebuah dinamo atau generator
Motor:
Dari kata Latin motus, salah satu yang memberi
gerak, penggerak utama. Suatu alat yang mengubahenergi listrik menjadi energi mekanik.
Generator:
Suatu alat yang mengubah energi mekanik menjadienergi listrik. Meskipun istilah generator AC dan DC
dalam penggunaan umum, generator biasanya
dianggap sebagai alat yang memberikan arus DC.
Alternator:Suatu alat yang mengubah energi mekanik menjadienergi listrik arus bolak-balik, generator AC.
Landmark Of Electric Motor Pembangunan
Elektromagnetisme penemuan pada tahun 1820 Hans Christian Oersted,
Denmark
1827 Pernyataan hukum konduksi listrik, hukum Ohm George S. Ohm,Jerman
1830 Penemuan induksi elektromagnetik Joseph Henry, Amerika
1831 Penemuan induksi elektromagnetik Michael Faraday, Inggris
Praktis pertama dinamo, sekitar 1867
Bagian 2: Electric Motor Dan Generator Dasar
Elektrodinamis Prinsip
Hukum FaradayAgar saat ini dapat diperoleh dari rangkaian listrik, sebuah gaya gerak listrik (tegangan) harus
dibangun dan dipertahankan antara kedua ujung rangkaian. Gaya gerak listrik ini dapat dibentuk
dalam beberapa cara, salah satunya adalah melalui generator elektromagnetik.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 13/43
Michael Faraday menemukan bahwa potensial listrik dapat dibuat antar ujung-ujung sebuah
konduktor dalam tiga cara berikut:
Oleh sebuah konduktor bergerak atau memotong medan magnet stasioner. (DC
Generator)
Dengan yang bergerak memotong medan magnet stasioner konduktor. (AC Generator)
Oleh perubahan dalam jumlah garis-garis magnetik yang dilingkupi oleh loop atau
kumparan stasioner. (Transformer)
Hukum Faraday menyatakan bahwa, “EMF (gaya gerak listrik) induksi di antara ujung-ujung
sebuah loop atau kumparan sebanding dengan laju perubahan fluks magnet yang dilingkupi olehkumparan; atau EMF terinduksi antara ujung-ujung sebuah bar konduktor sebanding dengan
waktu tingkat di mana fluks magnet dipotong oleh kondektur. “
Undang-undang ini menekankan laju perubahan atau menilai atau memotong fluks daripada
kepadatan atau luas medan magnet.
Hukum LenzHukum Lenz menyatakan bahwa, “Suatu perubahan dalam fluks magnet yang melewati atau
menghubungkan dengan, satu lingkaran atau menyebabkan kumparan induksi EMF harus dalamarah yang akan menentang setiap perubahan dalam kondisi sirkuit, oposisi ini diproduksi
magnetis ketika arus mengalir sebagai tanggapan terhadap induced EMF. “
Setiap kali ada perubahan arus dalam sebuah magnetizing koil, yang bekerja untuk mengubah
fluks pada kumparan, tegangan diinduksikan yang cenderung untuk mencegah perubahan. Jadi,
jika kita mencoba untuk mengurangi arus yang mengalir dalam kumparan magnetizing, teganganakan dikembangkan yang akan cenderung tetap tidak berubah saat ini. Demikian juga, jika kita
berusaha untuk mendirikan sebuah arus dalam sebuah kumparan magnetizing, tegangan akandikembangkan yang akan cenderung untuk menjaga arus dari meningkat.
Prinsip Dasar Generator
Konversi EnergiUntuk menghasilkan tegangan, perlu untuk memindahkan konduktor melalui medan magnet
seperti yang dinyatakan di atas. Mekanik energi yang dibutuhkan untuk memberikan gerak konduktor ini. Dengan bidang energi tetap konstan, kondektur adalah mengubah energi mekanik
menjadi energi listrik.
Tegangan Generasi
Ada hubungan tertentu antara arah fluks magnet, arah gerakan dari konduktor dan arah induksiEMF. Gambar 1 menunjukkan gerakan konduktor tegak lurus terhadap medan magnet. Tegangan
dan arus keluaran yang tegak lurus terhadap kedua gerakan konduktor dan medan magnet.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 14/43
Gambar 1. Tegangan Generasi
Untuk menggambarkan hal ini dengan tangan kanan Fleming aturan, ibu jari dan dua jari
pertama dari tangan kanan diperluas pada sudut yang tepat untuk satu sama lain, ibu jari akanmenunjukkan arah gerakan dari konduktor, jari telunjuk akan menunjukkan arah medan magnet ,
dan jari tengah akan menunjukkan arah tegangan atau arus.
Dengan menerapkan aturan ini, orang dapat melihat bahwa arus akan terbalik jika gerakanperubahan konduktor dari bawah ke atas. Hal ini berlaku meskipun medan magnet tidak berubah
posisi. Oleh karena itu, kumparan berputar pada Gambar 2 akan menghasilkan sebuah tegangan
yang terus-menerus berubah arah.
Gambar 2. Kumparan berputar dalamMedan Magnet
A. Tegangan induced di
Pindah Melalui
Konduktor Medan
MagnetB. Kumparan berputar
dalam Medan Magnet
Kumparan di posisi AB, pada Gambar 2, membungkus jumlah maksimum fluks. Fluks menurunsebagai kumparan posisi bergerak menuju CD dan menjadi nol pada CD, karena bidang
kumparan sejajar dengan medan magnet. Kemudian peningkatan fluks arah yang berlawanan,
mencapai maksimum negatif di BA dan berkurang lagi ke nol pada DC. Fluks membalikkan dan
naik kembali pada arah yang asli untuk mencapai maksimum pada AB.
Meskipun fluks maksimum pada posisi AB dan BA dan posisi nol pada CD dan DC, induksi
EMF akan maksimum pada posisi CD dan DC dan posisi nol pada AB dan BA. Hal ini benar
karena EMF tergantung pada tingkat perubahan laju fluks atau fluks memotong garis dan bukanpada kuantitas terlampir.
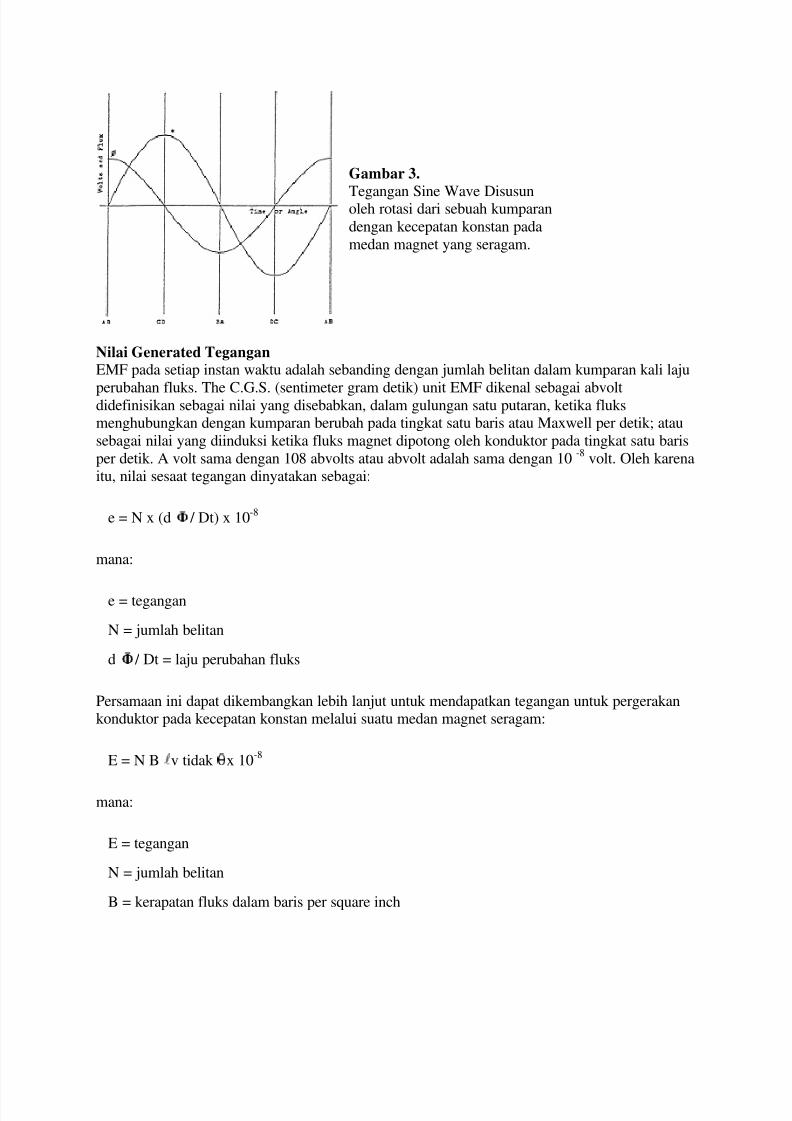
Jika kumparan pada Gambar 2 yang diputar pada kecepatan konstan pada medan magnet yang
seragam, sebuah gelombang sinus tegangan akan diperoleh. Hal ini diperlihatkan pada Gambar 3
di mana baik jumlah fluks tertutup dan EMF terinduksi diplot terhadap waktu.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 15/43
Gambar 3.
Tegangan Sine Wave Disusunoleh rotasi dari sebuah kumparan
dengan kecepatan konstan pada
medan magnet yang seragam.
Nilai Generated TeganganEMF pada setiap instan waktu adalah sebanding dengan jumlah belitan dalam kumparan kali laju
perubahan fluks. The C.G.S. (sentimeter gram detik) unit EMF dikenal sebagai abvoltdidefinisikan sebagai nilai yang disebabkan, dalam gulungan satu putaran, ketika fluksmenghubungkan dengan kumparan berubah pada tingkat satu baris atau Maxwell per detik; atau
sebagai nilai yang diinduksi ketika fluks magnet dipotong oleh konduktor pada tingkat satu baris
per detik. A volt sama dengan 108 abvolts atau abvolt adalah sama dengan 10-8
volt. Oleh karenaitu, nilai sesaat tegangan dinyatakan sebagai:
e = N x (d / Dt) x 10-8
mana:
e = tegangan
N = jumlah belitan
d / Dt = laju perubahan fluks
Persamaan ini dapat dikembangkan lebih lanjut untuk mendapatkan tegangan untuk pergerakankonduktor pada kecepatan konstan melalui suatu medan magnet seragam:
E = N B v tidak x 10-8
mana:
E = tegangan
N = jumlah belitan
B = kerapatan fluks dalam baris per square inch

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 16/43
= Panjang konduktor dalam inci
v = kecepatan dalam inci per detik
= Sudut antara konduktor dan medan fluks
Jika konduktor bergerak langsung di lapangan pada sudut kanan, lalu = 90 ° dan = 1.
Persamaan kemudian menjadi:
E = N B x 10 in-8
Perlu dicatat bahwa persamaan ini adalah bentuk khusus dari persamaan asli dan tidak berlaku
dalam semua kasus.
PRINSIP DASAR MOTOR
Konversi EnergiSebagaimana dinyatakan di atas, energi mekanik diubah menjadi energi listrik oleh gerakan
konduktor melalui medan magnet. Kebalikan dari ini juga benar. Jika energi listrik dipasok kesebuah konduktor berbohong normal medan magnet, mengakibatkan arus di konduktor, gaya
mekanis sehingga energi mekanik akan diproduksi.
Memproduksi Mechanical ForceSeperti pada generator, motor memiliki hubungan tertentu antara arah fluks magnet, arah gerakan
konduktor atau kekuatan, dan arah tegangan atau arus.
Karena motor adalah kebalikan dari generator, Fleming aturan tangan kiri dapat digunakan. Jika
ibu jari dan dua jari tangan kiri diperluas pada sudut yang tepat untuk satu sama lain, ibu jariakan menunjukkan arah gerakan, maka telunjuk akan menunjukkan arah medan magnet, dan jari
tengah akan menunjukkan arah arus . Dalam baik motor atau generator, jika arah dari setiap dua
faktor diketahui, ketiga dapat dengan mudah ditentukan.
Nilai Mechanical Angkatan
Gaya yang bekerja pada sebuah konduktor membawa arus tergantung pada kerapatan medanmagnet, panjang konduktor, dan nilai arus yang mengalir dalam konduktor. Dengan
mengasumsikan bahwa konduktor yang terletak pada sudut kanan medan magnet, gaya yang
dikembangkan dapat dinyatakan sebagai berikut:
F = (B I) / 10
mana:
F = gaya dalam dyne
B = kerapatan fluks dalam baris per sentimeter persegi
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 17/43
= Panjang konduktor dalam sentimeter
I = arus dalam ampere.
Pada saat yang sama torsi sedang diproduksi, konduktor bergerak dalam medan magnet dan
menghasilkan tegangan. Tegangan ini bertentangan dengan tegangan yang menyebabkan arusmelalui konduktor dan disebut sebagai countervoltage atau EMF kembali. Nilai arus yang
mengalir melalui angker tergantung pada perbedaan antara tegangan dan countervoltage.
Contoh Perhitungan
Generator
Diketahui:
N = 60 ternyata
B = 40,000 baris per square inch= 3,0 inci
v = 600 inci per detik
Cari:
E = tegangan
E = 60 x 40.000 x 3 x 600 x 10-8 = 43,2 volt
MotorDiketahui:
B = 6.000 baris per sentimeter persegi
= 10 cm,
Aku = 50 ampli
Cari:
F = gaya
F = (6.000 x 10 x 50) / 10 = 300.000 dyne
Newton = Pounds x 4,44823
Dyne = Newton x 100.000

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 18/43
DC Machines, Principles Of Operation
Generator
Dalam generator, konduktor bergerak melalui sebuah medan magnet stasioner menghasilkantegangan. Jika sebuah kumparan diputar melalui medan magnet seperti yang ditunjukkan pada
Gambar 4, tegangan bolak-balik akan diproduksi. Untuk membuat tegangan ini tersedia untuk sebuah sirkuit eksternal stasioner, dua slip cincin dan sikat harus disediakan. Untuk rangkaian
eksternal untuk menghasilkan tegangan DC, maka perlu untuk membalikkan polaritas mengaraheksternal pada waktu yang sama dalam kumparan tegangan dibalik. Hal ini dicapai dengan
segmentasi secarik cincin untuk membentuk apa yang disebut komutator. Dasar dua segmen
komutator diilustrasikan pada Gambar 5. Kumparan tunggal ini, dua potong komutator akanmenghasilkan sebuah searah tetapi tegangan berdenyut seperti ditunjukkan pada Gambar 6.
Namun, ketika sejumlah besar segmen komutator atau panel digunakan, tegangan yang
dihasilkan akan lebih seragam seperti yang ditunjukkan pada Gambar 7.
Gambar 4. Sikat dan slip ring memberikantegangan AC
Gambar 5. Kuas dan Commutator
memberikan tegangan DC
Gambar 6. Searah, berdenyut Voltage

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 19/43
Gambar 7. Uniform DC Voltage
Sebagaimana dinyatakan di atas, tegangan yang dihasilkan dalam satu konduktor adalah:
E = N B x 10 in-8
mana:
B = kerapatan fluks dalam baris per square inch
= Panjang konduktor dalam inci
v = kecepatan dalam inci per detik
Persamaan ini dapat dikembangkan untuk persamaan berikut mesin DC:
E = (Z / path) x x kutub x (rpm / 60) x 10-8
mana:
Z = jumlah konduktor
= Fluks per kutub dalam garis
Persamaan ini mewakili tegangan rata-rata. Untuk mesin tertentu, itu dapat dikurangi untuk:

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 20/43
E = K1 Dengan
mana:
= Fluks per kutub
S = kecepatan dalam rpm
Ke arah1 = Semua faktor-faktor lain
MotorSeperti dinyatakan sebelumnya, jika saat ini dipasok ke sebuah konduktor dalam medan magnet,
sebuah kekuatan akan diproduksi. Gaya dikembangkan dalam satu konduktor adalah:
F = (B I) / 10
mana:
F = gaya dalam dyne
B = kerapatan fluks dalam baris per sentimeter persegi
= Panjang konduktor dalam sentimeter
I = arus dalam ampere
Persamaan ini dapat dikembangkan untuk berikut ini untuk motor DC:
T = 11,73 x (Z / path) x x kutub x ISebuah x 10-10
mana:
T = torsi dalam ft-lb
Z = jumlah konduktor
= Fluks per kutub dalam garis
I = arus dalam ampere
Untuk mesin tertentu, ini dapat dikurangi dengan:
T = K2 IA
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 21/43
mana:
= Fluks per kutub dalam garis
DiSebuah = Arus dalam ampere
Ke arah2 = Semua faktor-faktor lain
Ke arah2 tidak sama dengan K1 untuk tegangan. Torsi di atas bukan output torsi dari poros,melainkan total torsi yang dikembangkan oleh angker. Bagian dari torsi total ini diperlukan
untuk mengatasi inersia angker itu sendiri.
Output tenaga kuda dari setiap motor dapat dinyatakan sebagai:
HP = T x N / C
mana:
T = output torsi dalam ft-lb
N = kecepatan dalam rpm
Konstanta C = 5.252
Konstruksi Umum DC
Tipikal generator atau motor DC biasanya terdiri dari: Sebuah inti angker, sebuah celah udara,
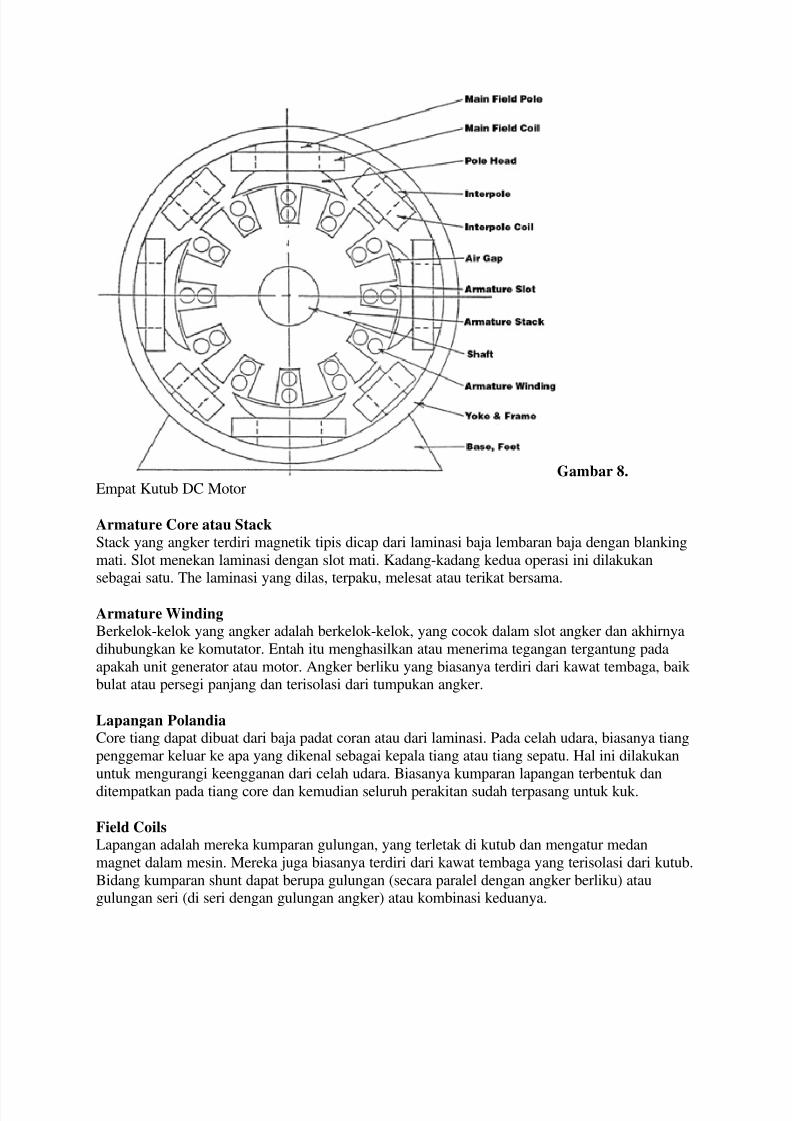
tiang, dan kuk yang membentuk rangkaian magnetik; yang angker berkelok-kelok, berliku-likulapangan, sikat dan komutator yang membentuk rangkaian listrik dan bingkai , akhirnya lonceng,bantalan, sikat mendukung dan poros yang menyediakan dukungan mekanis. Lihat gambar 8.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 22/43
Gambar 8. Empat Kutub DC Motor
Armature Core atau Stack
Stack yang angker terdiri magnetik tipis dicap dari laminasi baja lembaran baja dengan blanking
mati. Slot menekan laminasi dengan slot mati. Kadang-kadang kedua operasi ini dilakukansebagai satu. The laminasi yang dilas, terpaku, melesat atau terikat bersama.
Armature WindingBerkelok-kelok yang angker adalah berkelok-kelok, yang cocok dalam slot angker dan akhirnya
dihubungkan ke komutator. Entah itu menghasilkan atau menerima tegangan tergantung pada
apakah unit generator atau motor. Angker berliku yang biasanya terdiri dari kawat tembaga, baik bulat atau persegi panjang dan terisolasi dari tumpukan angker.
Lapangan PolandiaCore tiang dapat dibuat dari baja padat coran atau dari laminasi. Pada celah udara, biasanya tiang
penggemar keluar ke apa yang dikenal sebagai kepala tiang atau tiang sepatu. Hal ini dilakukan
untuk mengurangi keengganan dari celah udara. Biasanya kumparan lapangan terbentuk dan
ditempatkan pada tiang core dan kemudian seluruh perakitan sudah terpasang untuk kuk.
Field CoilsLapangan adalah mereka kumparan gulungan, yang terletak di kutub dan mengatur medan
magnet dalam mesin. Mereka juga biasanya terdiri dari kawat tembaga yang terisolasi dari kutub.
Bidang kumparan shunt dapat berupa gulungan (secara paralel dengan angker berliku) ataugulungan seri (di seri dengan gulungan angker) atau kombinasi keduanya.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 23/43
Kuk
Beban adalah cincin baja yang melingkar, yang mendukung lapangan, tiang mekanis danmenyediakan jalur magnetik yang diperlukan di antara tiang. Beban dapat padat atau dilaminasi.
Dalam banyak mesin-mesin DC, beban juga berfungsi sebagai bingkai.
KomutatorKomutator adalah penyearah mekanis, yang mengubah tegangan AC yang berputar ke DC
tegangan konduktor. Terdiri dari sejumlah segmen biasanya sama dengan jumlah slot. Segmenatau komutator batang bantalan terbuat dari perak, tembaga dan dipisahkan dari satu sama lain
oleh isolasi mika.
Kuas dan Brush HolderKuas melakukan arus dari komutator ke sirkuit eksternal. Ada banyak jenis kuas. Pemegang kuas
biasanya kotak logam yang berbentuk persegi panjang. Pemegang kuas pegas yang memegang
sikat kontak dengan komutator. Setiap sikat biasanya memiliki tembaga fleksibel shunt ataudikepang, yang meluas ke kabel memimpin. Sering kali, seluruh sikat perakitan adalah terisolasi
dari frame dan dibuat bergerak sebagai satu unit tentang komutator untuk memungkinkanpenyesuaian.
Interpoles
Interpoles mirip dengan lapangan utama terletak di kutub dan beban antara kutub medan utama.Mereka telah gulungan secara seri dengan gulungan armature. Interpoles memiliki fungsi
mengurangi efek reaksi angker di zona commutating. Mereka menghilangkan kebutuhan untuk
menggeser sikat perakitan.
Frame, Akhiri Bells, Shaft, dan Bearings
Frame dan akhir biasanya lonceng baja, aluminium atau magnesium coran digunakan untuk
mewadahi dan mendukung bagian-bagian mesin dasar. Yang angker dipasang pada poros baja,yang didukung antara dua bantalan. Bantalan yang baik lengan baju, bola atau roller tipe. Mereka
biasanya dilumasi oleh lemak atau minyak.
Back End, Front End
Akhir beban motor adalah Back End. Akhir beban yang berlawanan, paling sering akhirkomutator, adalah Front End dari motor.
Gulungan angker
Ring program Winding
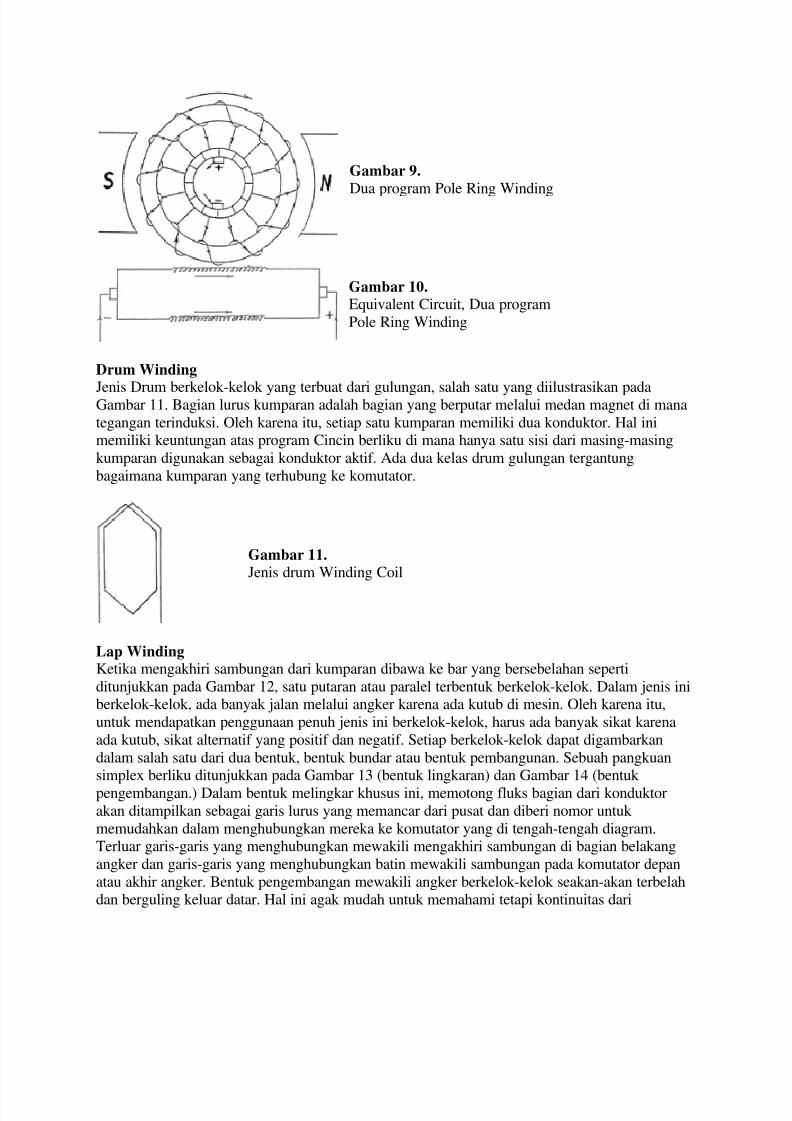
Cincin program tua jenis berkelok-kelok, sekarang usang, ditampilkan pada Gambar 9 dan
ekuivalen rangkaian pada Gambar 10. Hal ini dapat dilihat bahwa terdapat jumlah yang samamenghasilkan tegangan konduktor pada setiap sisi angker dan tegangan konduktor aditif dari
bawah ke atas di setiap sisi. Ada dua jalur antara positif dan sikat negatif dan tegangan per pathadalah tegangan yang dihasilkan mesin. Setiap jalan memberikan setengah dari arus keluaran.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 24/43
Gambar 9.
Dua program Pole Ring Winding
Gambar 10. Equivalent Circuit, Dua program
Pole Ring Winding
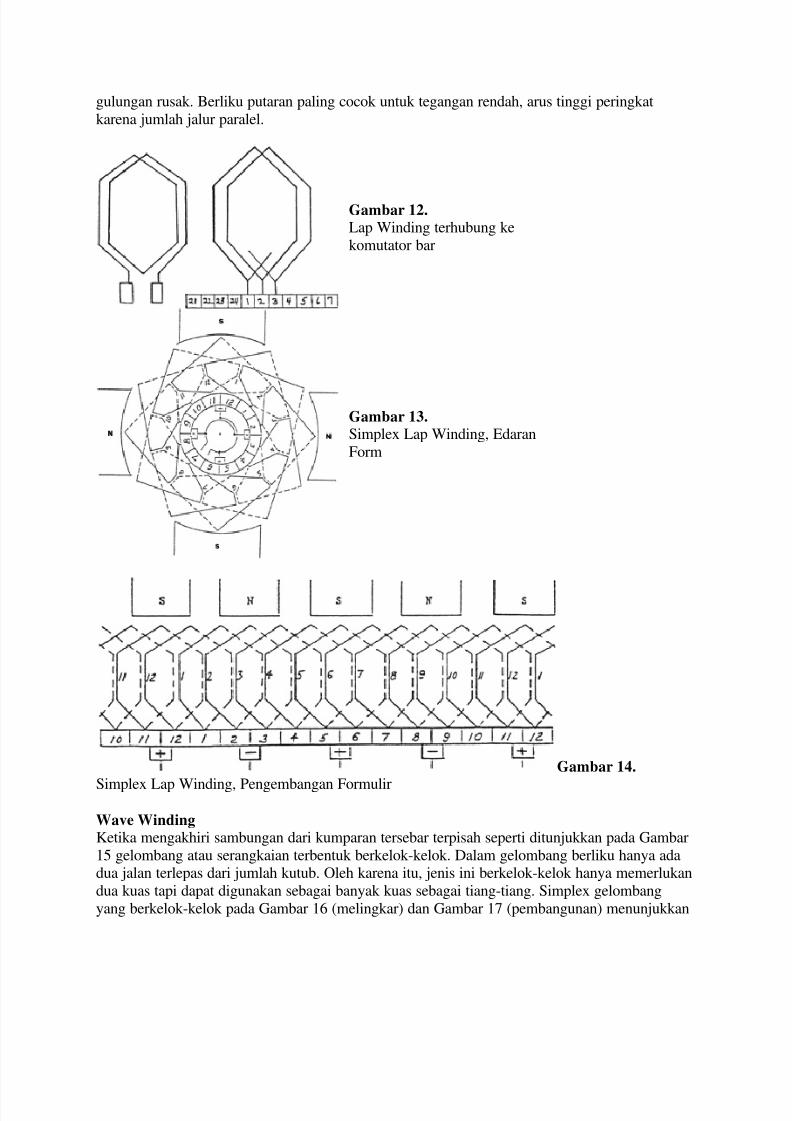
Drum Winding
Jenis Drum berkelok-kelok yang terbuat dari gulungan, salah satu yang diilustrasikan padaGambar 11. Bagian lurus kumparan adalah bagian yang berputar melalui medan magnet di mana
tegangan terinduksi. Oleh karena itu, setiap satu kumparan memiliki dua konduktor. Hal inimemiliki keuntungan atas program Cincin berliku di mana hanya satu sisi dari masing-masing
kumparan digunakan sebagai konduktor aktif. Ada dua kelas drum gulungan tergantung
bagaimana kumparan yang terhubung ke komutator.
Gambar 11. Jenis drum Winding Coil
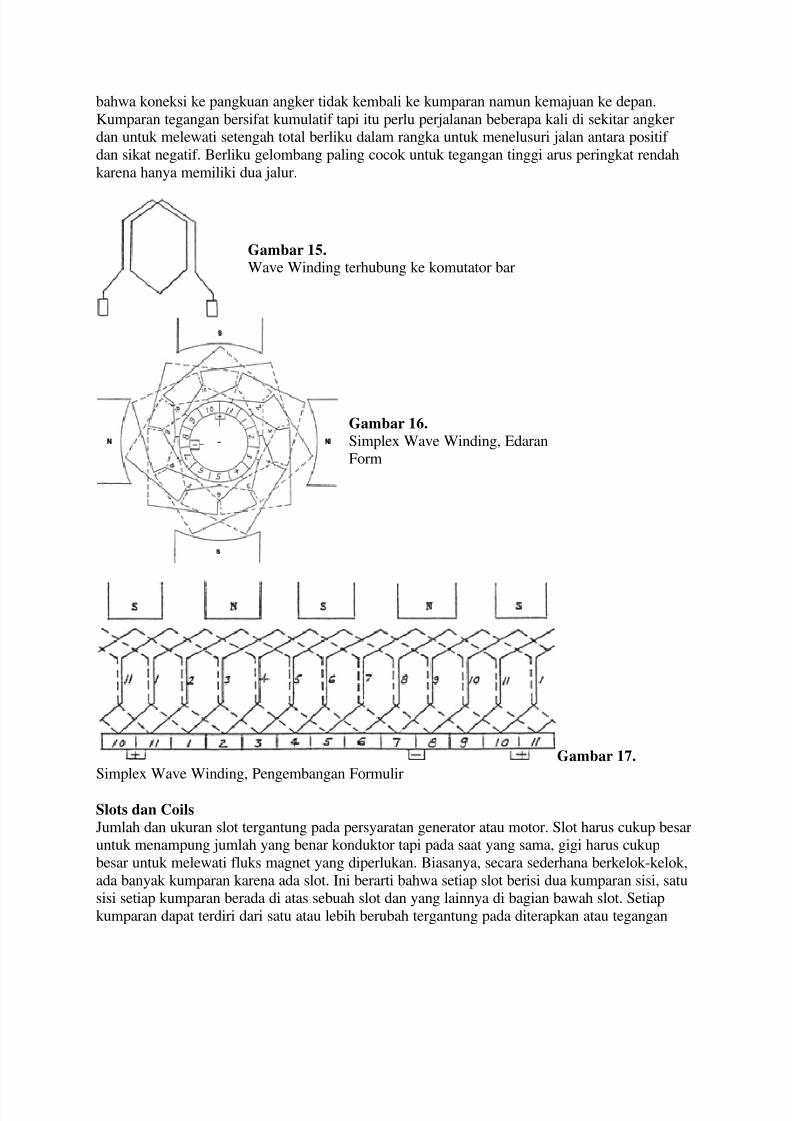
Lap WindingKetika mengakhiri sambungan dari kumparan dibawa ke bar yang bersebelahan seperti
ditunjukkan pada Gambar 12, satu putaran atau paralel terbentuk berkelok-kelok. Dalam jenis iniberkelok-kelok, ada banyak jalan melalui angker karena ada kutub di mesin. Oleh karena itu,
untuk mendapatkan penggunaan penuh jenis ini berkelok-kelok, harus ada banyak sikat karena
ada kutub, sikat alternatif yang positif dan negatif. Setiap berkelok-kelok dapat digambarkan
dalam salah satu dari dua bentuk, bentuk bundar atau bentuk pembangunan. Sebuah pangkuan
simplex berliku ditunjukkan pada Gambar 13 (bentuk lingkaran) dan Gambar 14 (bentuk pengembangan.) Dalam bentuk melingkar khusus ini, memotong fluks bagian dari konduktor
akan ditampilkan sebagai garis lurus yang memancar dari pusat dan diberi nomor untuk
memudahkan dalam menghubungkan mereka ke komutator yang di tengah-tengah diagram.Terluar garis-garis yang menghubungkan mewakili mengakhiri sambungan di bagian belakang
angker dan garis-garis yang menghubungkan batin mewakili sambungan pada komutator depan
atau akhir angker. Bentuk pengembangan mewakili angker berkelok-kelok seakan-akan terbelahdan berguling keluar datar. Hal ini agak mudah untuk memahami tetapi kontinuitas dari
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 25/43
gulungan rusak. Berliku putaran paling cocok untuk tegangan rendah, arus tinggi peringkat
karena jumlah jalur paralel.
Gambar 12. Lap Winding terhubung ke
komutator bar
Gambar 13. Simplex Lap Winding, Edaran
Form
Gambar 14.
Simplex Lap Winding, Pengembangan Formulir
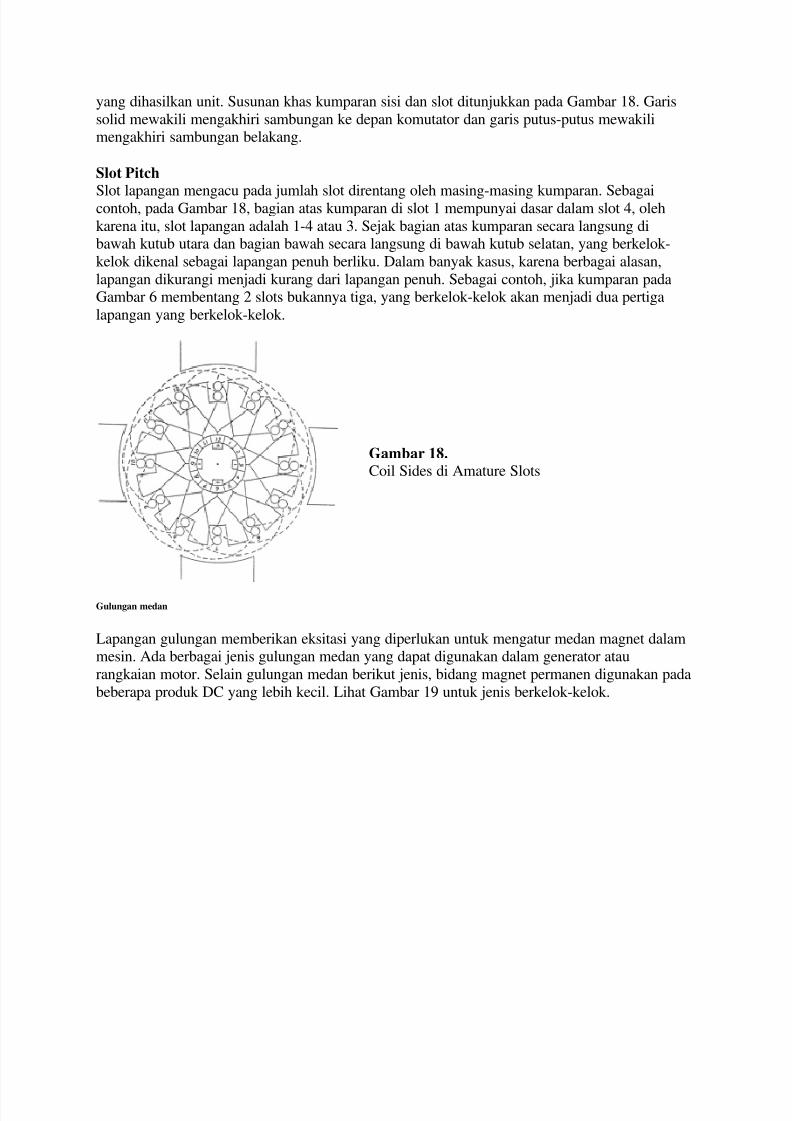
Wave WindingKetika mengakhiri sambungan dari kumparan tersebar terpisah seperti ditunjukkan pada Gambar
15 gelombang atau serangkaian terbentuk berkelok-kelok. Dalam gelombang berliku hanya adadua jalan terlepas dari jumlah kutub. Oleh karena itu, jenis ini berkelok-kelok hanya memerlukan
dua kuas tapi dapat digunakan sebagai banyak kuas sebagai tiang-tiang. Simplex gelombang
yang berkelok-kelok pada Gambar 16 (melingkar) dan Gambar 17 (pembangunan) menunjukkan
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 26/43
bahwa koneksi ke pangkuan angker tidak kembali ke kumparan namun kemajuan ke depan.
Kumparan tegangan bersifat kumulatif tapi itu perlu perjalanan beberapa kali di sekitar angkerdan untuk melewati setengah total berliku dalam rangka untuk menelusuri jalan antara positif
dan sikat negatif. Berliku gelombang paling cocok untuk tegangan tinggi arus peringkat rendah
karena hanya memiliki dua jalur.
Gambar 15. Wave Winding terhubung ke komutator bar
Gambar 16. Simplex Wave Winding, EdaranForm
Gambar 17. Simplex Wave Winding, Pengembangan Formulir
Slots dan Coils
Jumlah dan ukuran slot tergantung pada persyaratan generator atau motor. Slot harus cukup besaruntuk menampung jumlah yang benar konduktor tapi pada saat yang sama, gigi harus cukup
besar untuk melewati fluks magnet yang diperlukan. Biasanya, secara sederhana berkelok-kelok,
ada banyak kumparan karena ada slot. Ini berarti bahwa setiap slot berisi dua kumparan sisi, satusisi setiap kumparan berada di atas sebuah slot dan yang lainnya di bagian bawah slot. Setiap
kumparan dapat terdiri dari satu atau lebih berubah tergantung pada diterapkan atau tegangan
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 27/43
yang dihasilkan unit. Susunan khas kumparan sisi dan slot ditunjukkan pada Gambar 18. Garis
solid mewakili mengakhiri sambungan ke depan komutator dan garis putus-putus mewakilimengakhiri sambungan belakang.
Slot Pitch
Slot lapangan mengacu pada jumlah slot direntang oleh masing-masing kumparan. Sebagaicontoh, pada Gambar 18, bagian atas kumparan di slot 1 mempunyai dasar dalam slot 4, oleh
karena itu, slot lapangan adalah 1-4 atau 3. Sejak bagian atas kumparan secara langsung dibawah kutub utara dan bagian bawah secara langsung di bawah kutub selatan, yang berkelok-
kelok dikenal sebagai lapangan penuh berliku. Dalam banyak kasus, karena berbagai alasan,
lapangan dikurangi menjadi kurang dari lapangan penuh. Sebagai contoh, jika kumparan padaGambar 6 membentang 2 slots bukannya tiga, yang berkelok-kelok akan menjadi dua pertiga
lapangan yang berkelok-kelok.
Gambar 18. Coil Sides di Amature Slots
Gulungan medan
Lapangan gulungan memberikan eksitasi yang diperlukan untuk mengatur medan magnet dalammesin. Ada berbagai jenis gulungan medan yang dapat digunakan dalam generator atau
rangkaian motor. Selain gulungan medan berikut jenis, bidang magnet permanen digunakan pada
beberapa produk DC yang lebih kecil. Lihat Gambar 19 untuk jenis berkelok-kelok.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 28/43
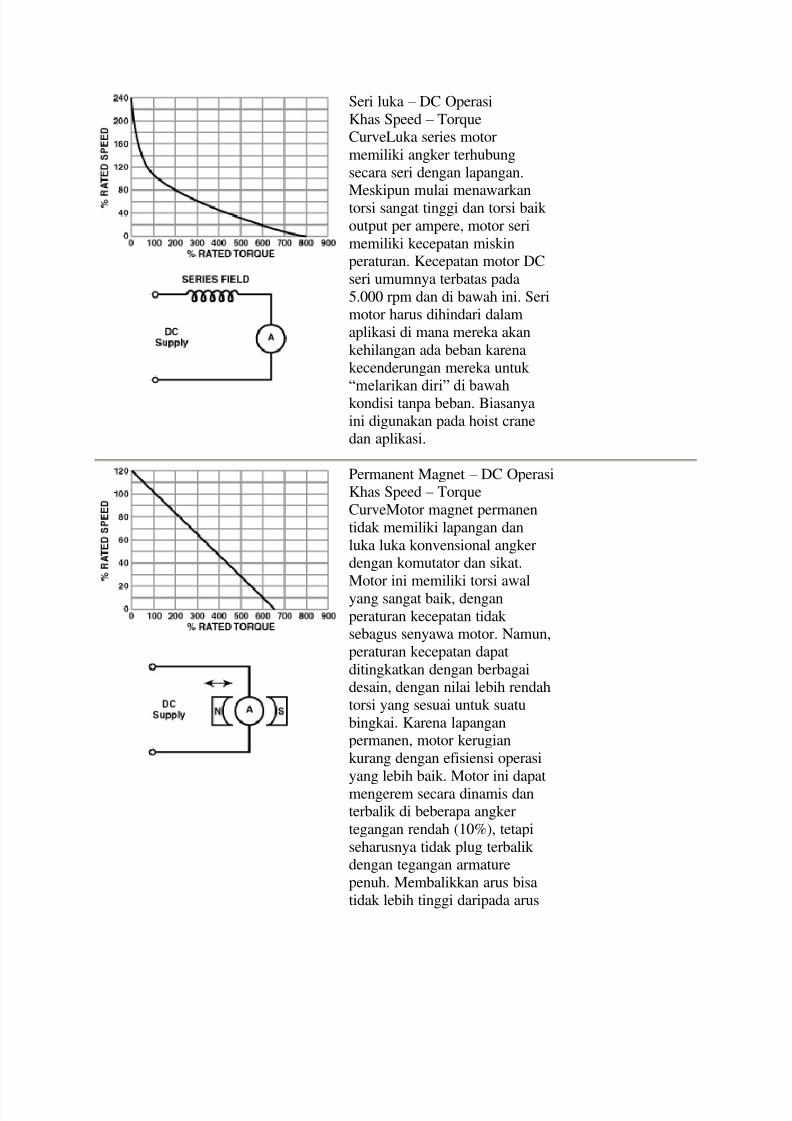
Shunt luka – DC Operasi
Khas Speed – TorqueCurveLuka shunt motor, dengan
didorong angker di lapangan,
menawarkan kecepatan relatif
datar-karakteristik torsi.Dikombinasikan dengan
dikontrol secara inheren
kecepatan tanpa beban, inimemberikan kecepatan yang
baik regulasi atas beban lebar
kisaran. Sementara torsi awalrelatif lebih rendah daripada
enis lainnya berkelok-kelok DC,
shunt motor luka menawarkan
kontrol sederhana untuk layanan
pembalikan.
Senyawa luka – DC OperasiKhas Speed – Torque
CurveCompound luka (stabil
shunt) motor menggunakansebuah gulungan medan secara
seri dengan angker di samping
lapangan shunt untuk
memperoleh suatu kompromidalam kinerja antara rangkaian
dan jenis shunt motor. Jenis inimenawarkan kombinasi awal
yang baik torsi dan kecepatanstabilitas. Standar peracikan
adalah sekitar 12%. Peracikan
berat hingga 40 hingga 50%dapat diberikan untuk torsi awal
tinggi khusus aplikasi, seperti
hoists dan crane.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 29/43
Seri luka – DC Operasi
Khas Speed – TorqueCurveLuka series motor
memiliki angker terhubung
secara seri dengan lapangan.
Meskipun mulai menawarkantorsi sangat tinggi dan torsi baik
output per ampere, motor seri
memiliki kecepatan miskinperaturan. Kecepatan motor DC
seri umumnya terbatas pada
5.000 rpm dan di bawah ini. Serimotor harus dihindari dalam
aplikasi di mana mereka akan
kehilangan ada beban karena
kecenderungan mereka untuk
“melarikan diri” di bawahkondisi tanpa beban. Biasanya
ini digunakan pada hoist cranedan aplikasi.
Permanent Magnet – DC OperasiKhas Speed – Torque
CurveMotor magnet permanen
tidak memiliki lapangan dan
luka luka konvensional angkerdengan komutator dan sikat.
Motor ini memiliki torsi awalyang sangat baik, dengan
peraturan kecepatan tidak sebagus senyawa motor. Namun,
peraturan kecepatan dapat
ditingkatkan dengan berbagaidesain, dengan nilai lebih rendah
torsi yang sesuai untuk suatu
bingkai. Karena lapanganpermanen, motor kerugian
kurang dengan efisiensi operasi
yang lebih baik. Motor ini dapatmengerem secara dinamis danterbalik di beberapa angker
tegangan rendah (10%), tetapi
seharusnya tidak plug terbalik dengan tegangan armature
penuh. Membalikkan arus bisa
tidak lebih tinggi daripada arus
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 30/43
armature yang terkunci.
Gambar 19. Gulungan medan
Terpisah Excited WindingKetika bidang terhubung ke sumber daya eksternal, ini adalah bidang bersemangat secaraterpisah.
Straight Shunt WindingBerkelok-kelok ini terhubung secara paralel dengan angker. Lilitan shunt biasanya terdiri dari
sejumlah besar belitan kawat ukuran kecil. Ini adalah berkelok-kelok yang baik untuk
membalikkan aplikasi karena menyediakan jumlah yang sama torsi di kedua arah. Torsi / kurva
saat ini adalah non-linear di atas beban penuh. Luka shunt motor sering memiliki karakteristik kecepatan meningkat dengan meningkatnya beban.
Series WindingBerkelok-kelok ini tersambung secara seri dengan angker. Serangkaian berliku biasanya terdiri
dari sejumlah kecil belitan kawat ukuran besar. Dengan ini berkelok-kelok, motor dapat
menghasilkan mulai tinggi dan kelebihan torsi. Desain ini tidak digunakan untuk aplikasi denganbeban ringan atau tidak ada kondisi beban.
Compound WindingBerkelok-kelok ini terdiri dari shunt seri berkelok-kelok dan berliku. Hal ini juga dikenal sebagai
senyawa eksitasi. Berliku seri dapat dirancang sebagai rangkaian awal hanya atau sebagai seri
mulai dan jalankan.
Stabil Shunt WindingSeperti senyawa berkelok-kelok, berkelok-kelok ini terdiri dari shunt seri berkelok-kelok danberliku. Seri atau stabilisasi berliku memiliki jumlah putaran lebih sedikit daripada seri berkelok-
kelok dalam senyawa mesin luka. Sebuah menstabilkan berliku digunakan untuk menjamin
kecepatan terkulai dengan berlebihan. Ini juga menambah torsi dalam satu arah operasi danmengurangi dari torsi dalam arah sebaliknya operasi dan di regenerasi.
Kompensasi shunt WindingKompensasi shunt shunt motor memiliki berkelok-kelok dan berliku seri wajah tiang terbuat dari
konduktor besar ditempatkan di slot dalam menghadapi lapangan utama kutub. Arah arus dalam
gulungan kompensasi adalah lawan dari arus dalam konduktor angker lewat di bawah tiang.
Fluks yang dihasilkan oleh gulungan kompensasi menetralkan fluks dari konduktor angker lewatdi bawah tiang sehingga distorsi dari fluksi celah udara dapat dikurangi. Kompensasi shunt
motor menjaga kecepatan konstan atau diatur dengan baik pada semua beban, tidak ada beban
melalui overload. Tidak seperti shunt stabil berkelok-kelok, berliku-liku wajah tiang menambah
torsi baik di depan dan berbalik arah rotasi. Kompensasi shunt gulungan, karena masalah biayadan kesulitan konstruksi, diberikan hanya pada motor besar, biasanya 840 frame dan lebih besar.
Switching

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 31/43
Tegangan maksimum dari sebuah angker berliku dapat diperoleh bila kuas berada dalam kontak
dengan orang-orang konduktor, yang di tengah-tengah antara kutub. Ini akan menghasilkankemungkinan terbesar jumlah konduktor memotong garis-garis magnetik dalam satu arah antara
yang positif dan sikat negatif. Posisi sikat ini dikenal sebagai posisi netral tidak ada beban dari
kuas. Arus dalam suatu kumparan armature berbalik arah sebagai sisi kumparan berpindah dari
satu tiang ke lain yang berlawanan polaritas, sedangkan fungsi dari komutator ini adalah untuk menjaga arus searah. Pembalikan ini sekarang dikenal sebagai pergantian. Komutator bertindak
sebagai saklar untuk menjaga arus yang mengalir dalam satu arah. Namun, tingkat perubahan
yang cepat dalam arah arus dalam kumparan tertentu menginduksi sebuah tegangan yang cukupdalam kumparan yang cenderung untuk menjaga arus yang mengalir dalam arah yang asli. Oleh
karena itu, pembalikan saat ini tertunda menyebabkan laju perubahan dipercepat dekat akhir
periode pergantian. Hal ini menghasilkan busur jika pembalikan tidak selesai sebelum istirahatsikat kontak dengan kumparan yang terlibat. Setiap lengkung merugikan pengoperasian mesin
dan harus menetral.
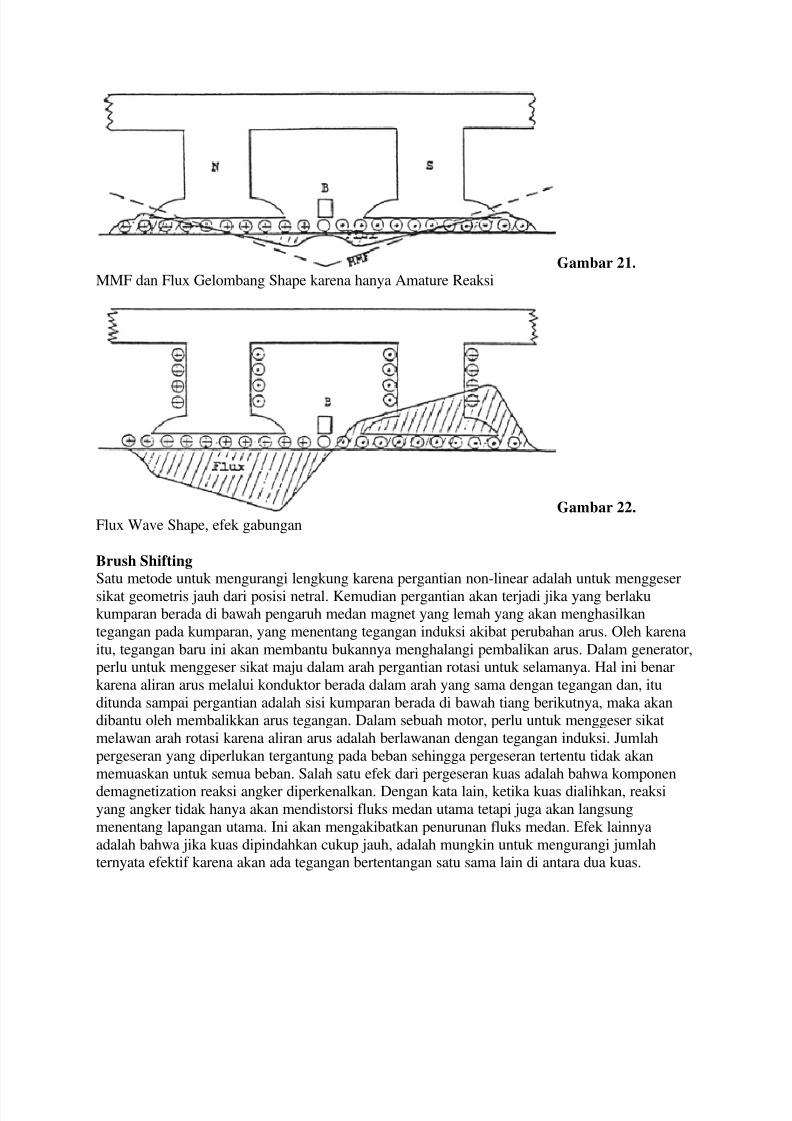
Armature Reaksi
Karena konduktor angker arus membawa mereka mendirikan sebuah medan magnet yangmendistorsi atau menentang lapangan utama. Hal ini disebut reaksi angker dan merupakan fungsidari jumlah beban hadir. Gambar 21 menunjukkan MMF dan bentuk gelombang fluks karenareaksi angker saja; dan Gambar 22 menunjukkan efek gabungan dari keduanya. Hal ini dapat
dilihat bahwa reaksi angker menyebabkan fluks bergeser, sehingga cenderung jenuh salah satu
ujung tiang. Jika efek ini cukup berarti, dapat merugikan kinerja yang memuaskan dari mesin.Jika cukup parah, hal itu mungkin mengakibatkan flashover, yang merupakan lengkung progresif
atas bar berturut-turut sampai busur membentang dari sikat positif ke negatif, sehingga mesin
yang mengalami hubungan arus pendek terminal.
Gambar 20. MMF and Flux Wave Shape due to Main Field only
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 32/43
Gambar 21. MMF dan Flux Gelombang Shape karena hanya Amature Reaksi
Gambar 22. Flux Wave Shape, efek gabungan
Brush ShiftingSatu metode untuk mengurangi lengkung karena pergantian non-linear adalah untuk menggeser
sikat geometris jauh dari posisi netral. Kemudian pergantian akan terjadi jika yang berlakukumparan berada di bawah pengaruh medan magnet yang lemah yang akan menghasilkan
tegangan pada kumparan, yang menentang tegangan induksi akibat perubahan arus. Oleh karena
itu, tegangan baru ini akan membantu bukannya menghalangi pembalikan arus. Dalam generator,perlu untuk menggeser sikat maju dalam arah pergantian rotasi untuk selamanya. Hal ini benar
karena aliran arus melalui konduktor berada dalam arah yang sama dengan tegangan dan, itu
ditunda sampai pergantian adalah sisi kumparan berada di bawah tiang berikutnya, maka akandibantu oleh membalikkan arus tegangan. Dalam sebuah motor, perlu untuk menggeser sikat
melawan arah rotasi karena aliran arus adalah berlawanan dengan tegangan induksi. Jumlah
pergeseran yang diperlukan tergantung pada beban sehingga pergeseran tertentu tidak akan
memuaskan untuk semua beban. Salah satu efek dari pergeseran kuas adalah bahwa komponendemagnetization reaksi angker diperkenalkan. Dengan kata lain, ketika kuas dialihkan, reaksi
yang angker tidak hanya akan mendistorsi fluks medan utama tetapi juga akan langsung
menentang lapangan utama. Ini akan mengakibatkan penurunan fluks medan. Efek lainnya
adalah bahwa jika kuas dipindahkan cukup jauh, adalah mungkin untuk mengurangi jumlahternyata efektif karena akan ada tegangan bertentangan satu sama lain di antara dua kuas.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 33/43
Pada generator komponen yang demagnetization reaksi angker akan merugikan karena akan ada
penurunan tegangan yang dihasilkan dengan meningkatnya beban. Namun, dalam sebuah motor,efeknya akan bermanfaat karena kecepatan akan cenderung tetap konstan.
Interpoles
Metode lain untuk memerangi tegangan induksi yang disebabkan oleh pembalikan arus adalahpenggunaan interpoles. Para interpoles terletak di titik netral geometris tengah antara kutub
utama dan memberikan pembalikan medan magnet kekuatan dan polaritas yang tepat. Merekamenghilangkan perlunya sikat pergeseran dan, karena ini, efek demagnetization reaksi angker
dihilangkan. Para interpole harus memiliki cukup kekuatan untuk mengatasi reaksi angker dan
menyediakan lapangan membalik Oleh karena itu, terhubung secara seri dengan gulunganarmature. Ketika angker arus meningkat dalam proporsi yang sama. Dalam generator, yang
interpole harus memiliki polaritas yang sama seperti tiang berikutnya dalam arah rotasi
sementara di sebuah motor yang interpole harus memiliki polaritas yang sama seperti tiang
terakhir.
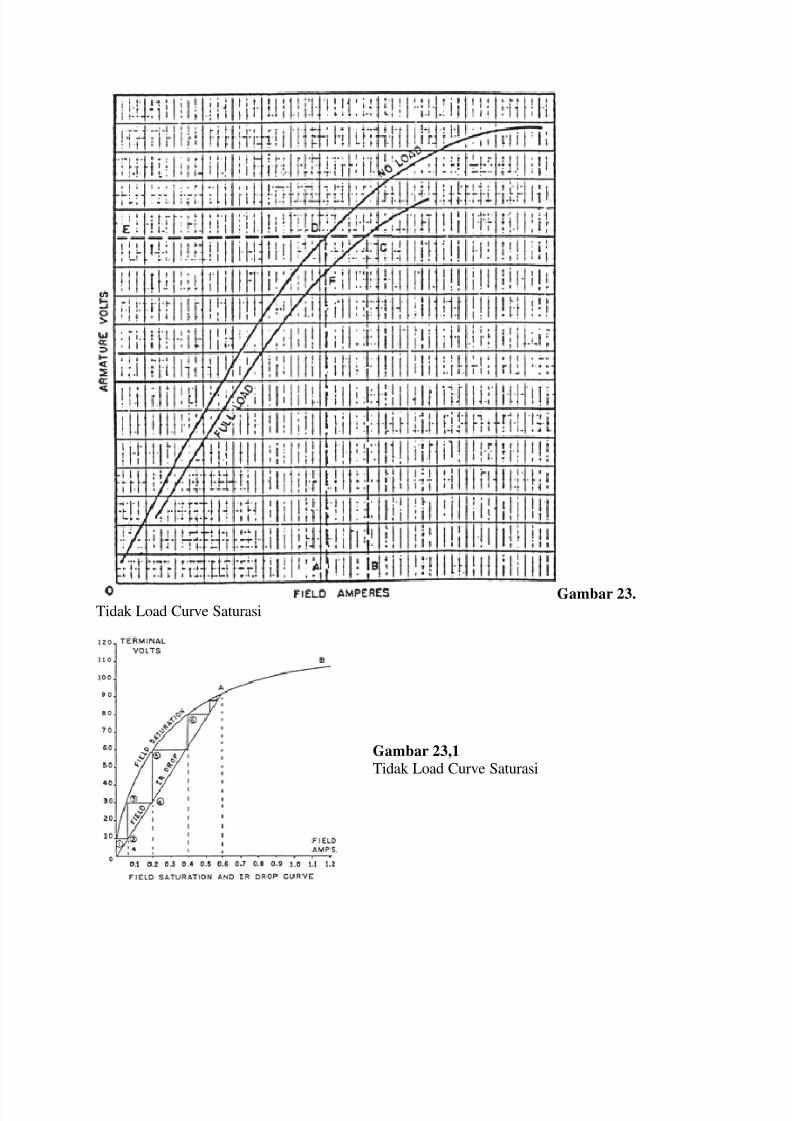
Karakteristik generator
Tidak Load Curve Saturasi
Tipikal kurva kejenuhan tanpa beban ditunjukkan pada Gambar 23. Ini mirip dengan kurvamagnetisasi disebutkan sebelumnya, kecuali bahwa itu mewakili seluruh rangkaian magnetik
mesin daripada bahan magnetik tertentu. Juga, ia memiliki tegangan keluaran generator
bersekongkol melawan arus medan daripada kerapatan fluksi magnetizing melawan kekerasan.
Hal ini dapat dilakukan karena generator tegangan berbanding lurus dengan fluks medan dan jumlah belitan adalah tetap. Ada kurva kejenuhan yang berbeda untuk setiap kecepatan. Semakin
rendah garis lurus bagian dari kurva mewakili celah udara karena bagian-bagian magnet tidak
jenuh. Bila bagian magnetik mulai jenuh, kurva membungkuk sampai kejenuhan lengkap
tercapai. Maka kurva menjadi garis lurus lagi.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 34/43
Gambar 23. Tidak Load Curve Saturasi
Gambar 23,1 Tidak Load Curve Saturasi

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 35/43
Gambar 23,2 Tidak Load Curve Saturasi
Generator Build UpGenerator membangun biasanya mengacu pada kenaikan bertahap tegangan pada terminal
angker ketika mesin diri bersemangat dan dioperasikan dengan kecepatan normal. Hal inidiilustrasikan pada Gambar 25 dengan mengacu pada garis resistensi lapangan yang
menunjukkan bagaimana arus medan bervariasi sebagai tegangan bidang bervariasi. Kemiringan
garis ini adalah bidang resistensi pada temperatur konstan. Naik tegangan dimulai denganmagnetisme sisa besi lapangan. Hal ini memberikan tegangan kecil keluaran E1 yang makan
kembali ke lapangan sebagai 1. 1 meningkatkan fluks memberikan tegangan yang sedikit lebih
besar, E2 . Dan2 menyebabkan 2 mengalir. Proses ini berlanjut sampai mesin mulai jenuh danberhenti pada titik di mana garis perlawanan lapangan memotong kurva saturasi. Jika kecepatan
mesin dikurangi sehingga kurva saturasi menjadi lapangan bersinggungan dengan kurva
resistansi, tegangan tidak akan membangun. Hal ini dikenal sebagai kecepatan kritis. Juga, pada
kecepatan tertentu, jika resistensi bidang meningkat dengan penambahan resistensi eksternal,
resistensi kritis dapat dihubungi.
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 36/43
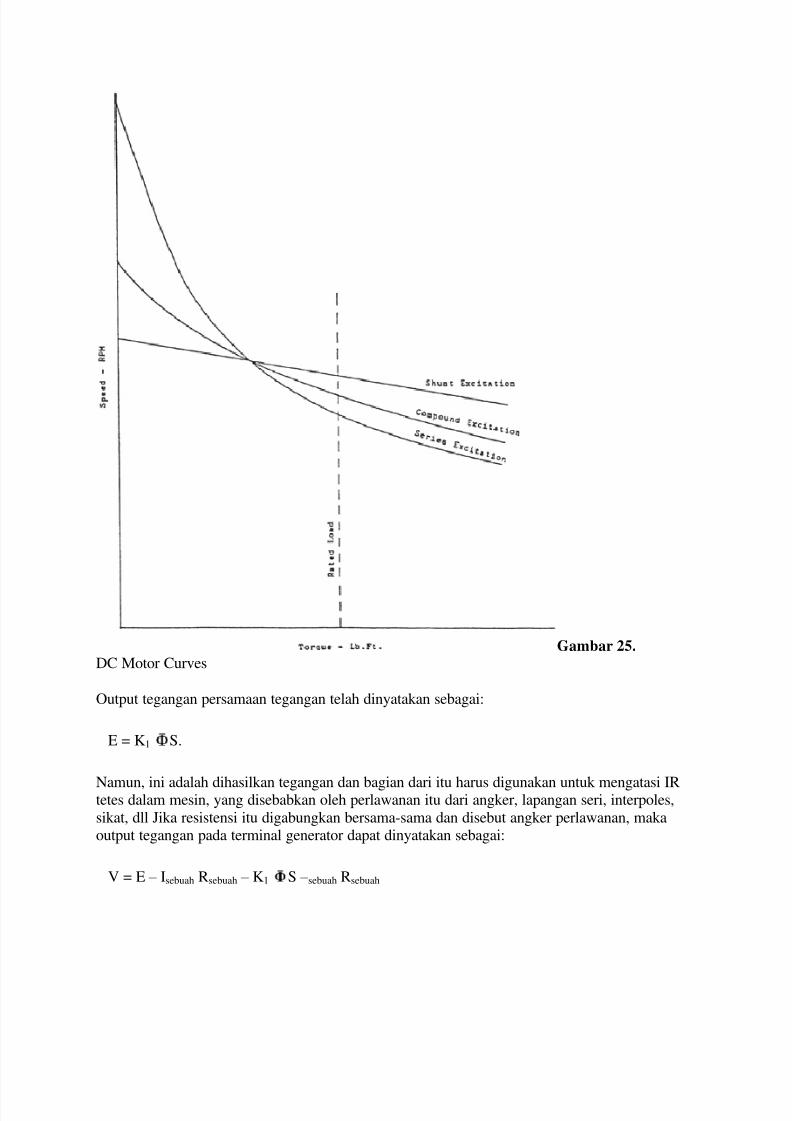
Gambar 25. DC Motor Curves
Output tegangan persamaan tegangan telah dinyatakan sebagai:
E = K1 S.
Namun, ini adalah dihasilkan tegangan dan bagian dari itu harus digunakan untuk mengatasi IRtetes dalam mesin, yang disebabkan oleh perlawanan itu dari angker, lapangan seri, interpoles,
sikat, dll Jika resistensi itu digabungkan bersama-sama dan disebut angker perlawanan, makaoutput tegangan pada terminal generator dapat dinyatakan sebagai:
V = E – Isebuah Rsebuah – K1 S – sebuah Rsebuah

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 37/43
mana:
E = dihasilkan tegangan
Disebuah = Amature saat
Rsebuah = Amature rangkaian hambatan
Ke arah1 = Konstanta mesin
= Fluks per kutub
S = kecepatan.
Karakteristik eksternalKurva yang menunjukkan hubungan antara tegangan keluaran dan arus keluaran dikenal sebagaikarakteristik eksternal. Ditunjukkan pada Gambar 24 adalah kurva karakteristik eksternal untuk
generator dengan berbagai jenis eksitasi. Jika generator, yang secara terpisah bersemangat,digerakkan dengan kecepatan konstan dan memiliki arus medan tetap, tegangan keluaran akan
berkurang dengan peningkatan arus beban seperti pada gambar. Penurunan ini disebabkan olehangker angker reaksi penolakan dan efek. Jika fluks medan tetap konstan, tegangan yang
dihasilkan akan cenderung tetap konstan dan tegangan keluaran akan sama dengan yang
dihasilkan tegangan drop minus inframerah dari rangkaian armature. Namun, komponendemagnetizing reaksi angker cenderung mengurangi fluktuasi, sehingga menambah faktor
tambahan, yang mengurangi tegangan keluaran.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 38/43
Gambar 24. Generator DC Curves
Dalam bersemangat shunt generator, dapat dilihat bahwa tegangan keluaran berkurang lebih
cepat daripada dengan eksitasi terpisah. Hal ini disebabkan oleh kenyataan bahwa, karena
tegangan keluaran berkurang karena efek reaksi angker dan angker IR jatuhkan, teganganlapangan juga berkurang yang selanjutnya mengurangi fluks. Juga dapat dilihat bahwa di luar
nilai kritis tertentu, maka generator shunt menunjukkan tren pembalikan nilai-nilai saat inidengan penurunan tegangan. Titik ini arus keluaran maksimum dikenal sebagai titik breakdown.Pada kondisi sirkuit pendek, satu-satunya fluksi yang tersedia untuk menghasilkan arus magnet
residual dari angker.
Membangun tegangan pada rangkaian generator, rangkaian eksternal harus tersambung dan
hambatan direduksi menjadi nilai yang relatif rendah. Karena angker adalah seri dengan
lapangan, arus beban harus mengalir untuk memperoleh fluks di lapangan. Sebagai tegangan danarus beban naik resistensi dapat ditingkatkan ke nilai normal. Sebagai kurva karakteristik
eksternal menunjukkan, tegangan output yang dimulai dari nol, mencapai puncaknya, dan
kemudian jatuh kembali ke nol.
Kombinasi dari medan shunt lapangan dan serangkaian memberikan yang terbaik karakteristik
eksternal seperti yang diilustrasikan pada Gambar 24. Jatuh tegangan, yang terjadi di mesin
shunt, yang diimbangi dengan tegangan naik, yang terjadi di mesin seri. Penambahan dalam jumlah yang memadai ternyata offset seri IR yang angker angker drop dan efek reaksi,
menghasilkan rata-senyawa generator yang memiliki tegangan yang hampir konstan. Jika lebih
seri berubah ditambahkan, tegangan akan naik dengan beban dan mesin dikenal sebagai over-senyawa generator.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 39/43
Voltage Regulation
Peraturan tegangan adalah perubahan tegangan terminal dengan perubahan arus beban dengankecepatan konstan. Sebuah generator memiliki peraturan yang baik jika perubahan tegangan
antara tanpa beban dan beban penuh kecil. Jika perubahan besar, peraturan yang miskin.
Dinyatakan dalam bentuk persamaan:
Persen Voltage Regulation = (ENL – EFL ) / EFL x 100 atau untuk beberapa mesin senyawa,
Persen Voltage Regulation = (EFL – ENL ) / EFL x 100
Gambar 24 menunjukkan bahwa regulasi mesin yang terpisah gembira adalah lebih baik
daripada mesin shunt. Namun, peraturan yang terbaik adalah senyawa yang diperoleh dengan
mesin. Mesin seri praktis tidak ada peraturan sama sekali dan, karenanya, memiliki sedikit
aplikasi praktis.
Motor Karakteristik
Motor OperasiSeperti yang dinyatakan sebelumnya, sebuah konduktor bergerak melalui sebuah medan magnet
karena tindakan motor juga menghasilkan tegangan yang berlawanan dengan tegangan yang
diberikan. Ini adalah EMF kembali. Kemudian untuk motor tindakan persamaan teganganadalah:
V = E + ISebuah RSebuah = K1 S + ISebuah RSebuah
mana:
V = diterapkan atau terminal tegangan
E = kembali EMF
DiSebuah = Amature saat
RSebuah = Angker rangkaian hambatan’s
Ke arah1 = Konstanta mesin
= Fluks per kutub
S = kecepatan
Ketika membandingkan persamaan ini dengan persamaan tegangan generator, dapat dilihat
bahwa dalam generator tegangan yang dihasilkan lebih tinggi dari tegangan terminal sementara
di sebuah motor yang sebaliknya adalah benar. Oleh karena itu, selama tegangan yang dihasilkankurang dari tegangan terminal, mesin beroperasi sebagai motor dan mengambil daya dari sisi
listrik, tetapi ketika tegangan yang dihasilkan menjadi lebih besar daripada tegangan terminal,
mesin menjadi generator, pasokan listrik , dan membutuhkan energi mekanik untuk tetapberoperasi.

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 40/43
Bagian belakang atau counter EMF bertindak sebagai kontrol untuk jumlah arus mekanis yang
dibutuhkan untuk setiap beban. Ketika beban mekanik meningkat, efek pertama adalahpengurangan kecepatan. Namun pengurangan kecepatan juga menyebabkan penurunan di
belakang EMF, sehingga membuat tersedia peningkatan tegangan untuk arus dalam armature.
Oleh karena itu, saat ini meningkat yang pada gilirannya akan meningkatkan torsi. Karena
tindakan ini, yang sangat sedikit penurunan dalam kecepatan cukup untuk memenuhipeningkatan permintaan torsi. Juga, daya input diatur ke jumlah yang diperlukan untuk
mensuplai motor kerugian dan output.
Speed Torque Curves
Kecepatan kurva torsi untuk tiga bentuk eksitasi ditunjukkan pada Gambar 25. Dalambersemangat shunt motor, perubahan kecepatan sedikit dan, karenanya, dianggap motor
kecepatan konstan. Juga, fluks medan hampir konstan dalam shunt motor dan torsi bervariasi
hampir langsung dengan arus armature.
Dalam motor seri kecepatan penurunan dengan peningkatan torsi jauh lebih besar. Hal ini
disebabkan oleh fakta bahwa fluks medan meningkat dengan meningkatnya arus, sehinggacenderung untuk mencegah penurunan kembali EMF yang sedang disebabkan oleh penurunankecepatan. Fluks medan bervariasi dalam serangkaian torsi motor dan bervariasi sebagai kuadrat
dari arus angker sampai saturasi tercapai. Setelah mencapai kejenuhan, kurva cenderung
mendekati garis lurus tren dari shunt motor. Beban yang tidak kecepatan motor seri biasanyaterlalu tinggi untuk keamanan dan, oleh karena itu, tidak boleh dioperasikan tanpa beban
memadai.
Senyawa kecepatan motor memiliki karakteristik torsi yang terletak antara shunt dan motor seri.
Speed Peraturan
Kecepatan peraturan adalah perubahan kecepatan dengan perubahan beban torsi, kondisi lainyang konstan. Sebuah motor memiliki peraturan yang baik jika tidak ada perubahan antara
kecepatan beban dan beban penuh kecepatan kecil.
Persen Speed Peraturan = (SNL – SFL) / SFL x 100 A shunt motor memiliki kecepatan yang baik
peraturan sementara motor seri memiliki kecepatan miskin peraturan. Untuk beberapa aplikasiseperti crane atau hoists, motor seri memiliki keunggulan karena hasil yang lebih gerakan
disengaja beban lebih berat. Juga, memperlambat dari seri motor lebih baik untuk mulai berat
beban. Namun, untuk banyak aplikasi yang shunt motor lebih disukai.
Motor Starting
Ketika angker tidak berputar, bagian belakang EMF adalah nol dan tegangan total tersedia untuk mengirimkan arus melalui armature. Karena resistensi angker rendah, arus yang sangat besarakan mengalir jika tegangan yang diaplikasikan di bawah kondisi ini. Oleh karena itu, perlu
untuk memasukkan perlawanan tambahan secara seri dengan angker sampai kecepatan yang
memuaskan dicapai di mana EMF belakang akan mengambil alih untuk membatasi input.
Kerugian Dan Efisiensi

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 41/43
Gesekan dan Windage
Kerugian tersebut termasuk bantalan gesekan, gesekan kuas, dan windage. Mereka juga dikenalsebagai kerugian mekanis. Mereka adalah konstan pada kecepatan tertentu, tetapi bervariasi
dengan perubahan kecepatan. Power kerugian akibat gesekan meningkat dengan kuadrat dari
kecepatan dan yang disebabkan oleh peningkatan windage sebagai kubus dari kecepatan.
Armature Tembaga Kerugian
Ini adalah aku2
R kerugian dari rangkaian angker, yang meliputi angker berkelok-kelok,komutator, dan sikat. Mereka bervariasi secara langsung dengan perlawanan dan sebagai kuadrat
dari arus.
Lapangan Tembaga KerugianIni adalah aku
2R kerugian dari rangkaian medan yang dapat mencakup gulungan medan shunt,
gulungan medan seri, interpole gulungan dan setiap shunts digunakan dalam kaitannya dengan
gulungan ini. Mereka bervariasi secara langsung dengan perlawanan dan sebagai kuadrat dariarus.
Core KerugianIni adalah arus eddy histeresis dan kerugian dalam armature. Dengan perubahan terus-menerus
arah fluks dalam besi angker, pengeluaran energi yang dibutuhkan untuk membawa besi melalui
loop histeresis lengkap. Ini adalah kerugian histeresis. Juga karena besi merupakan konduktordan berputar dalam medan magnet, tegangan akan dihasilkan. Hal ini, pada gilirannya, akan
mengakibatkan arus yang bersirkulasi kecil yang dikenal sebagai arus eddy. Jika inti yang solid
yang digunakan untuk angker, maka kerugian arus eddy akan tinggi. Mereka dikurangi denganmenggunakan laminasi tipis, yang terisolasi dari satu sama lain. Histeresis dan kerugian arus
eddy bervariasi dengan kerapatan fluksi dan kecepatan.
EfisiensiUntuk generasi atau motor, efisiensi sama dengan output dibagi dengan input. Namun, dalam
generator, input mekanis sementara output listrik. Dalam sebuah motor yang sebaliknya adalah
benar, karena itu:
Motor Efisiensi = (Input – Rugi) / Input
Generator Efisiensi = Output / (Output + Rugi)
Bagian 3: Horsepower Dasar
Pada abad ke-18 Inggris, batubara sedang memberi makan revolusi industri dan ThomasNewcomen didorong menciptakan mesin uap yang digunakan untuk memompa air dari tambangbatu bara. Itu Scott Namun, dengan nama James Watt, yang pada 1769 memperbaiki mesin uap
sehingga benar-benar bisa dilaksanakan dan praktis. Dalam upayanya untuk menjual mesin uap
baru, pertanyaan pertama pemilik tambang batu bara bertanya adalah “mesin anda bisa keluar kerja salah satu kuda saya?” Watt tidak tahu karena ia tidak tahu berapa banyak pekerjaan seekor kuda bisa lakukan. Untuk mengetahuinya, Watt dan mitranya membeli beberapa ukuran rata-rata
diukur kuda dan pekerjaan mereka. Mereka menemukan bahwa kuda rata-rata bekerja di tingkat
5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 42/43
kaki 22.000 pound per menit. Watt memutuskan, untuk beberapa alasan tidak diketahui, untuk
menambahkan 50% ke angka ini dan tingkat rata-rata 33.000 kaki kuda di pon per menit.
Yang penting adalah bahwa sekarang ada sistem di tempat untuk mengukur tingkat melakukan
kerja. Dan ada satuan daya, tenaga kuda.
Jika mesin uap telah dikembangkan suatu tempat lain di dunia, di mana kuda itu tidak adabinatang beban, kita mungkin rating lembu motor di kekuasaan atau kekuatan unta. Hari ini,
motor juga dinilai dalam Watts output.
hp = lb x FPM / 33.000
hp = ft-lb x rpm / 5.252
kW = hp x 0,7457
hpMetrik = Hp x 1,0138
Horsepower seperti yang didefinisikan oleh Watt, adalah sama untuk AC dan DC motor, mesin
bensin, anjing kereta, dll
Horsepower dan Electric Motors
Torsi = gaya x jari-jari = lb x ft = T
Speed = rpm = N
Konstan = 5.252 = C
HP = T x N / C
Torsi dan DC Motors
T = k Disebuah
Pada overload, torsi meningkat pada beberapa tingkat lebih rendah daripada peningkatan akibatarus saturasi
D
2
L dan Torque
258AT = 324 D2
L
259AT = 378 D2
L
Dengan diameter frame yang sama, yang 259AT memiliki 17% lebih D2
L dan dengan demikian17% lebih dan 17% lebih Torque. Torsi motor meningkat dengan peningkatan besi dan

5/11/2018 Teori Dasar Motor - slidepdf.com
http://slidepdf.com/reader/full/teori-dasar-motor 43/43
tembaga, dikombinasikan dengan saat ini. Ini dapat dikatakan bahwa dibutuhkan besi dan
tembaga untuk menghasilkan torsi dan torsi membuat produk. Atau dengan kata lain, apa yangmembuat Anda membeli produk TORSI dan yang BESI dan TEMBAGA. Tingkat melakukan
pekerjaan adalah kekuatan dan HORSEPOWER adalah satuan kekuasaan.
Kecepatan dan DC MotorsMotor DC shunt luka
Dengan beban motor, temperatur dan arus medan tetap konstan, kecepatan armaturedikendalikan oleh tegangan.
E = ((Z / a) x x P x (N / 60) x 10-8 ) + (I, Rsebuah R & Iip R & Ib )
Jumlah dari penurunan tegangan rangkaian angker dapat digambarkan sebagai IR
N = (E – IR) / K
Speed contoh: desain motor diberikan G6219, bingkai MC3212, 50 hp, 1150 rpm, 500 voltangker, 85 ampli beban penuh, 0,432 resistansi sirkuit angker panas, 0,206 angkerrangkaian resistansi dingin
Dan jatuh = IR = 85 amp x 0.432 = 36,72 volt
500 v lengan – 36,72 v drop = 463,28 bekerja volt
Volt per rpm = 463,28 / 1150 rpm = 0,40285
Nkecepatan dasar = 1150 rpm = (500 v – 36.72 v) / 0.40285
Dengan 250 v pada angker, ada bekerja 213,28 volt (250-36,72)
213,28 / 0,40285 = 529 rpm (bukan 1 / 2 kecepatan, 575 rpm)
N = 529 rpm = (250 v – 36.72 v) / 0.40285
N = (E – IR) / Ke arah = (E – IR) / 0,40285
K perubahan dengan perubahan beban dan suhu
HPMetrik = HP x 1,0138
kW = HP x 0,7457
Related Documents