VECTOR MECHANICS FOR ENGINEERS: DYNAMICS Tenth Edition Ferdinand P. Beer E. Russell Johnston, Jr. Phillip J. Cornwell Lecture Notes: Brian P. Self California Polytechnic State University CHAPTER © 2013 The McGraw-Hill Companies, Inc. All rights reserved. 16 Plane Motion of Rigid Bodies: Forces and Accelerations

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

VECTOR MECHANICS FOR ENGINEERS:
DYNAMICS
Tenth Edition
Ferdinand P. Beer
E. Russell Johnston, Jr.
Phillip J. Cornwell
Lecture Notes:
Brian P. Self California Polytechnic State University
CHAPTER
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
16 Plane Motion of Rigid Bodies:
Forces and Accelerations

Contents
16 - 2
Introduction
Equations of Motion of a Rigid Body
Angular Momentum of a Rigid Body in
Plane Motion
Plane Motion of a Rigid Body:
d’Alembert’s Principle
Axioms of the Mechanics of Rigid
Bodies
Problems Involving the Motion of a
Rigid Body
Sample Problem 16.1
Sample Problem 16.2
Sample Problem 16.3
Sample Problem 16.4
Sample Problem 16.5
Constrained Plane Motion
Constrained Plane Motion:
Noncentroidal Rotation
Constrained Plane Motion:
Rolling Motion
Sample Problem 16.6
Sample Problem 16.8
Sample Problem 16.9
Sample Problem 16.10

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Rigid Body Kinetics
2 - 3
Early design of prosthetic legs relied heavily on
kinetics. It was necessary to calculate the
different kinematics, loads, and moments
applied to the leg to make a safe device.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Rigid Body Kinetics
2 - 4
The forces and moments applied to a robotic
arm control the resulting kinematics, and
therefore the end position and forces of the
actuator at the end of the robot arm.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Introduction
16 - 5
• In this chapter and in Chapters 17 and 18, we will
be concerned with the kinetics of rigid bodies, i.e.,
relations between the forces acting on a rigid
body, the shape and mass of the body, and the
motion produced.
• Results of this chapter will be restricted to:
- plane motion of rigid bodies, and
- rigid bodies consisting of plane slabs or
bodies which are symmetrical with respect to
the reference plane.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Introduction
16 - 6
• Our approach will be to consider rigid bodies as
made of large numbers of particles and to use the
results of Chapter 14 for the motion of systems
of particles. Specifically,
GG HMamF and

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Equations of Motion for a Rigid Body
16 - 7
• Consider a rigid body
acted upon by several
external forces.
• Assume that the body is
made of a large number
of particles.
• For the motion of the
mass center G of the
body with respect to the
Newtonian frame Oxyz,
amF

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Equations of Motion for a Rigid Body
16 - 8
• For the motion of the
body with respect to the
centroidal frame
Gx’y’z’,
GG HM
• System of external
forces is equipollent
to the system
consisting of
. and GHam

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Rigid Body Angular Momentum in Three Dimensions
18 - 9
Angular momentum of a body about its mass center,
n
iiii
n
iiiiG mrrmvrH
11
Δ
The x component of the angular momentum,
n
iiiiz
n
iiiiy
n
iiiix
n
iiixiziiyixi
n
iiyiiziix
mxzmyxmzy
mzxzxyy
mrzryH
111
22
1
1
ΔΔΔ
Δ
Δ
dmzxdmxydmzyH zyxx 22
zxzyxyxx III
zzyzyxzxz
zyzyyxyxy
IIIH
IIIH

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Rigid Body Angular Momentum in Three Dimensions
18 - 10
zzyzyxzxz
zyzyyxyxy
zxzyxyxxx
IIIH
IIIH
IIIH
With respect to the principal axes of inertia,
z
y
x
I
I
I
00
00
00
zzzyyyxxx IHIHIH

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Angular Momentum of a Rigid Body in Plane Motion
16 - 11
• Consider a rigid slab
in plane motion. Slab
like bodies have xy
as plane of symmetry
• Angular momentum of the
slab may be computed by
I
mr
mrr
mvrH
ii
n
iiii
n
iiiiG
Δ
Δ
Δ
2
1
1
• After differentiation,
IIHG

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Angular Momentum of a Rigid Body in Plane Motion
16 - 12
• Results are also valid for
plane motion of bodies which
are symmetrical with respect
to the reference plane.
• Results are not valid for
asymmetrical bodies or three-
dimensional motion.
• Consider a rigid
slab in plane
motion.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Plane Motion of a Rigid Body: D’Alembert’s Principle
16 - 13
IMamFamF Gyyxx
• Motion of a rigid body in
plane motion is completely
defined by the resultant and
moment resultant about G of
the external forces.
• The external forces and the collective effective forces of
the slab particles are equipollent (reduce to the same
resultant and moment resultant) and equivalent (have the
same effect on the body).

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Problems Involving the Motion of a Rigid Body
16 - 14
• The fundamental relation between the forces
acting on a rigid body in plane motion and the
acceleration of its mass center and the angular
acceleration of the body is illustrated in a free-
body-diagram equation.
d’Alembert’s principle

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Problems Involving the Motion of a Rigid Body
16 - 15
principle of dynamic equilibrium

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Problems Involving the Motion of a Rigid Body
16 - 16
• The techniques for solving problems of static equilibrium
may be applied to solve problems of plane motion by
utilizing
- d’Alembert’s principle, or
- principle of dynamic equilibrium
• These techniques may also be applied to problems
involving plane motion of connected rigid bodies by
drawing a free-body-diagram equation for each body and
solving the corresponding equations of motion
simultaneously.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
12 - 17
The free body diagram is the same as you have done in statics and
in Ch 13; we will add the kinetic diagram in our dynamic analysis.
2. Draw your axis system (Cartesian, polar, path)
3. Add in applied forces (e.g., weight)
4. Replace supports with forces (e.g., tension force)
1. Isolate the body of interest (free body)
5. Draw appropriate dimensions (angles and distances)
x
y
Include your
positive
z-axis
direction too

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
12 - 18
Put the inertial terms for the body of interest on the kinetic diagram.
2. Draw in the mass times acceleration of the particle; if unknown,
do this in the positive direction according to your chosen axes. For
rigid bodies, also include the rotational term, IG.
1. Isolate the body of interest (free body)
m F a
G I M

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 19
Draw the FBD and KD
for the bar AB of mass
m. A known force P is
applied at the bottom of
the bar.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 20
P
L/2
L/2
r
A
Cx
Cy
mg
1. Isolate body
2. Axes
3. Applied forces
4. Replace supports with forces
5. Dimensions
6. Kinetic diagram
G G
xma
yma
I
C
B
x
y

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 21
A drum of 100 mm radius is attached
to a disk of 200 mm radius. The
combined drum and disk had a
combined mass of 5 kg. A cord is
attached as shown, and a force of
magnitude P=25 N is applied. The
coefficients of static and kinetic
friction between the wheel and
ground are ms= 0.25 and mk= 0.20,
respectively. Draw the FBD and KD
for the wheel.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 22
xma
yma
I
P
F
W
N x
y
=
1. Isolate body
2. Axes
3. Applied forces
4. Replace supports with forces
5. Dimensions
6. Kinetic diagram
100
mm
200 mm

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 23
The ladder AB slides
down the wall as
shown. The wall
and floor are both
rough. Draw the FBD
and KD for the
ladder.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Free Body Diagrams and Kinetic Diagrams
2 - 24
FA
W
NA
FB
NB
xma
yma
I
1. Isolate body
2. Axes
3. Applied forces
4. Replace supports with forces
5. Dimensions
6. Kinetic diagram
=
x
y
q

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.1
16 - 25
At a forward speed of 10 m/s, the truck brakes were
applied, causing the wheels to stop rotating. It was
observed that the truck to skidded to a stop in 7 m.
Determine the magnitude of the normal reaction and
the friction force at each wheel as the truck skidded
to a stop. The weight of the truck is WN.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.1
16 - 26
SOLUTION:
• Calculate the acceleration
during the skidding stop by
assuming uniform
acceleration.
• Apply the three corresponding scalar equations to solve
for the unknown normal wheel forces at the front and rear
and the coefficient of friction between the wheels and
road surface.
• Draw the free-body-diagram equation expressing the
equivalence of the external and effective forces.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 27
0
m10 7m
sv x= =
• Calculate the acceleration during the skidding stop by
assuming uniform acceleration.
( )
( )
2 20 0
2
2
m0 10 2 7m
s
v v a x x
a
= + -
æ ö= +ç ÷è ø
2
m7.14
sa = -
• Draw a free-body-diagram equation
expressing the equivalence of the
external and inertial terms.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 28
• Apply the corresponding scalar equations.
0 WNN BA
effyy FF
( )
( )7.14
0.7289.81
A B
k A B
k
k
F F ma
N N
W W g a
a
g
m
m
m
- - = -
- + =
- = -
= = =
effxx FF

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 29
0.341A BN W N W= - =
• Apply the corresponding scalar
equations.
( ) ( ) ( )1.5m 3.6m 1.2m
11.5 1.2 1.5 1.2
3.6 3.6
0.659
B
B
B
W N ma
W W aN W a
g g
N W
- + =
æ ö æ ö= + = +ç ÷ ç ÷è ø è ø
=
effAA MM

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 30
( )1 12 2
0.341rear AN N W= =
0.1705rearN W=
( )1 12 2
0.659front BN N W= =
0.3295frontN W=
( )( )0.728 0.1705rear k rearF N Wm= =
0.124rearF W=
( )( )0.728 0.3295front k frontF N Wm= =
0.240frontF W=

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.2
16 - 31
The thin plate of mass 8 kg is held in place as
shown.
Neglecting the mass of the links, determine
immediately after the wire has been cut (a) the
acceleration of the plate, and (b) the force in each
link.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 32
• SOLUTION:
• Note that after the wire is cut, all
particles of the plate move along
parallel circular paths of radius 150
mm. The plate is in curvilinear
translation.
• Draw the free-body-diagram equation expressing the
equivalence of the external and effective forces.
• Resolve into scalar component equations parallel and
perpendicular to the path of the mass center.
• Solve the component equations and the moment equation
for the unknown acceleration and link forces.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 33

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 34
• Note that after the wire is cut, all particles of the plate
move along parallel circular paths of radius 150 mm. The
plate is in curvilinear translation.
• Draw the free-body-diagram equation expressing the
equivalence of the external and effective forces.
• Resolve the diagram equation into components parallel
and perpendicular to the path of the mass center.
efftt FF
30cos
30cos
mg
amW
30cosm/s81.9 2a 2sm50.8a 60o

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 35
• Resolve the diagram equation into components parallel
and perpendicular to the path of the mass center.
efftt FF
30cos
30cos
mg
amW
30cosm/s81.9 2a 2sm50.8a 60o

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
16 - 36
• Solve the component equations and the moment equation
for the unknown acceleration and link forces.
effGG MM
0mm10030cosmm25030sin
mm10030cosmm25030sin
DFDF
AEAE
FF
FF
AEDF
DFAE
FF
FF
1815.0
06.2114.38

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.2
16 - 37
effnn FF
2sm81.9kg8619.0
030sin1815.0
030sin
AE
AEAE
DFAE
F
WFF
WFF
TFAE N9.47
N9.471815.0DFF CFDF N70.8

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 38
A uniform sphere of mass m and radius r is
projected along a rough horizontal surface
with a linear velocity v0. The coefficient of
kinetic friction between the sphere and the
surface is mk.
Determine: (a) the time t1 at which the
sphere will start rolling without sliding, and
(b) the linear and angular velocities of the
sphere at time t1.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 39
SOLUTION:
• Draw the free-body-diagram equation
expressing the equivalence of the
external and effective forces on the
sphere.
• Solve the three corresponding scalar
equilibrium equations for the normal
reaction from the surface and the linear
and angular accelerations of the sphere.
• Apply the kinematic relations for
uniformly accelerated motion to
determine the time at which the
tangential velocity of the sphere at the
surface is zero, i.e., when the sphere
stops sliding.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 40
SOLUTION:
• Draw the free-body-diagram equation
expressing the equivalence of external and
effective forces on the sphere.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 41
• Solve the three scalar
equilibrium equations.
effyy FF
0WN mgWN
effxx FF
ammg
amF
k
m ga km

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 42
m
2
32 mrrmg
IFr
k
r
gkm
2
5
effGG MM
NOTE: As long as the sphere both rotates
and slides, its linear and angular motions are
uniformly accelerated.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 43
• Apply the kinematic relations for uniformly
accelerated motion to determine the time at
which the tangential velocity of the sphere at the
surface is zero, i.e., when the sphere stops
sliding.
tgvtavv km 00
tr
gt k
m
2
500
ga kmr
gkm
2
5

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.5
16 - 44
1102
5t
r
grgtv k
k
mm
g
vt
km0
17
2
g
v
r
gt
r
g
k
kk
m
mm 0
117
2
2
5
2
5
r
v01
7
5
r
vrrv 0
117
5 07
51 vv
At the instant t1 when the
sphere stops sliding,
11 rv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 45
Knowing that the coefficient of static friction
between the tires and the road is 0.80 for the
automobile shown, determine the maximum
possible acceleration on a level road,
assuming rear-wheel drive

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 46
SOLUTION:
• Draw the free-body-diagram and
kinetic diagram showing the
equivalence of the external forces
and inertial terms.
• Write the equations of motion for
the sum of forces and for the sum
of moments.
• Apply any necessary kinematic
relations, then solve the resulting
equations.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 47
SOLUTION:
• Given: rear wheel drive,
dimensions as shown, m= 0.80
• Find: Maximum acceleration
• Draw your FBD and KD
NF NR
FR mg
x
y
xma
I
yma
=
x xF ma y yF ma
R xF ma 0R FN N mg
• Set up your equations of motion,
realizing that at maximum acceleration,
may and will be zero
G GM I (1.5) (1) (0.5) 0R F RN N F

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 48
• Solve the resulting equations: 4 unknowns are FR, max, NF and NR
(1)
(2) (3)
(4) (1.5) (1) (0.5) 0R F RN N F
0R FN N mg
R xF ma
R RF Nm
xR
maN
m(1)→(3) (5)
xF R
maN mg N mg
m (6) (5)→(2)

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 49
• Solve the resulting equations: 4 unknowns are FR, max, NF and NR
Solving this equation,
xR
maN
m(1)→(3) (5)
xF R
maN mg N mg
m (6)
(5)→(2)
(1) and (5) and (6) →(4)
1.5 1 0.5 0x xx
ma mamg ma
m m
23.74 m/sxa
50.5
2
x
ga
m

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 50
• Solve the resulting equations: 4 unknowns are FR, max, NF and NR
Solving this equation,
(1) and (5) and (6) →(4)
1.5 1 0.5 0x xx
ma mamg ma
m m
23.74 m/sxa
50.5
2
x
ga
m

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 51
• Alternatively, you could have chosen to sum moments about the
front wheel
NF
FR
NR
mg
x
y
xma
I
yma
=
F GM I mad (2.5) (1) 0 (0.5)R xN mg ma
• You can now use this equation with those on the previous slide to
solve for the acceleration

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 52
The thin pipe P and the uniform
cylinder C have the same outside
radius and the same mass. If they are
both released from rest, which of the
following statements is true?

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 53
a) The pipe P will have a greater acceleration
b) The cylinder C will have a greater
acceleration
c) The cylinder and pipe will have the same
acceleration

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Kinetics: Constrained Plane Motion
2 - 54
The forces at the bottom of the pendulum
depend on the pendulum mass and mass
moment of inertia, as well as the pendulum
kinematics.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Kinetics: Constrained Plane Motion
2 - 55
The forces one the
wind turbine blades
are also dependent
on mass, mass
moment of inertia,
and kinematics.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Plane Motion
16 - 56
• Most engineering
applications involve rigid
bodies which are moving
under given constraints,
e.g., cranks, connecting
rods, and non-slipping
wheels.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Plane Motion
16 - 57
• Constrained plane motion:
motions with definite
relations between the
components of acceleration
of the mass center and the
angular acceleration of the
body.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Plane Motion
16 - 58
• Solution of a problem involving
constrained plane motion begins
with a kinematic analysis.
• e.g., given q, , and , find
P, NA, and NB.
- kinematic analysis yields
• - application of d’Alembert’s
principle yields P, NA, and
NB.
. and yx aa

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Motion: Noncentroidal Rotation
16 - 59
• Noncentroidal rotation:
motion of a body is
constrained to rotate about a
fixed axis that does not pass
through its mass center.
• Kinematic relation between
the motion of the mass center
G and the motion of the body
about G,
2 rara nt

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 60
2 rara nt

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Motion: Noncentroidal Rotation
16 - 61
• The kinematic relations are
used to eliminate
from equations derived from
d’Alembert’s principle or
from the method of dynamic
equilibrium.
nt aa and

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Plane Motion: Rolling Motion
16 - 62
• For a balanced disk
constrained to roll
without sliding,
q rarx
• Rolling, no sliding:
NF sm ra
Rolling, sliding impending:
NF sm ra
Rotating and sliding:
ra , independent NF km

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Constrained Plane Motion: Rolling Motion
16 - 63
• For the geometric
center of an
unbalanced disk,
raO
The acceleration of
the mass center,
nOGtOGO
OGOG
aaa
aaa

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 64
The portion AOB of the
mechanism is actuated by gear D
and at the instant shown has a
clockwise angular velocity of 8
rad/s and a counterclockwise
angular acceleration of 40 rad/s2.
OB is welded at O.
Determine: a) tangential force
exerted by gear D, and b)
components of the reaction at
shaft O.
kg 3
mm 85
kg 4
OB
E
E
m
k
m

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 65
SOLUTION:
• Draw the free-body-equation for AOB,
expressing the equivalence of the
external and effective forces.
• Evaluate the external forces due to the
weights of gear E and arm OB and the
effective forces associated with the
angular velocity and acceleration.
• Solve the three scalar equations
derived from the free-body-equation
for the tangential force at A and the
horizontal and vertical components of
reaction at shaft O.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 66
rad/s 8
2srad40
kg 3
mm 85
kg 4
OB
E
E
m
k
m• Evaluate the external forces due to the weights of
gear E and arm OB and the effective forces.
N4.29sm81.9kg3
N2.39sm81.9kg4
2
2
OB
E
W
W
The reaction Rx and Ry arise from pinning the gear-rod system to the wall

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 67
rad/s 8
2srad40
kg 3
mm 85
kg 4
OB
E
E
m
k
m
mN156.1
srad40m085.0kg4 222
EEE kmI
N0.24
srad40m200.0kg3 2
rmam OBtOBOB
N4.38
srad8m200.0kg322
rmam OBnOBOB
mN600.1
srad40m.4000kg3 22
1212
121
LmI OBOB

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 68
N4.29
N2.39
OB
E
W
W
mN156.1 EI
N0.24tOBOB am
N4.38nOBOB am
mN600.1 OBI
• Solve the three scalar equations derived from the free-
body-equation for the tangential force at A and the
horizontal and vertical components of reaction at O.
effOO MM
mN600.1m200.0N0.24mN156.1
m200.0m120.0
OBtOBOBE IamIF
N0.63F

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 69
N4.29
N2.39
OB
E
W
W
mN156.1 EI
N0.24tOBOB am
N4.38nOBOB am
mN600.1 OBI
effxx FF
N0.24tOBOBx amR
N0.24xR

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.6
16 - 70
N4.29
N2.39
OB
E
W
W
mN156.1 EI
N0.24tOBOB am
N4.38nOBOB am
mN600.1 OBI
effyy FF
N4.38N4.29N2.39N0.63
y
OBOBOBEy
R
amWWFR
N0.24yR

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 71

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 72

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 73
In last sample problem the of rod and gear were same and one
torque equation was enough. Here 1 and 2 are different. So we
have to separate the two parts.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 74

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 75

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 76

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 77

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 78
A sphere of weight W is
released with no initial
velocity and rolls without
slipping on the incline.
Determine: a) the minimum
value of the coefficient of
friction, b) the velocity of G
after the sphere has rolled 10
ft and c) the velocity of G if
the sphere were to move 3 m
down a frictionless incline.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 79
SOLUTION:
• Draw the free-body-equation for the
sphere, expressing the equivalence of the
external and effective forces.
• With the linear and angular accelerations
related, solve the three scalar equations
derived from the free-body-equation for
the angular acceleration and the normal
and tangential reactions at C.
• Calculate the velocity after 3 m of
uniformly accelerated motion.
• Assuming no friction, calculate the linear
acceleration down the incline and the
corresponding velocity after 3 m.
• Calculate the friction coefficient required
for the indicated tangential reaction at C.
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
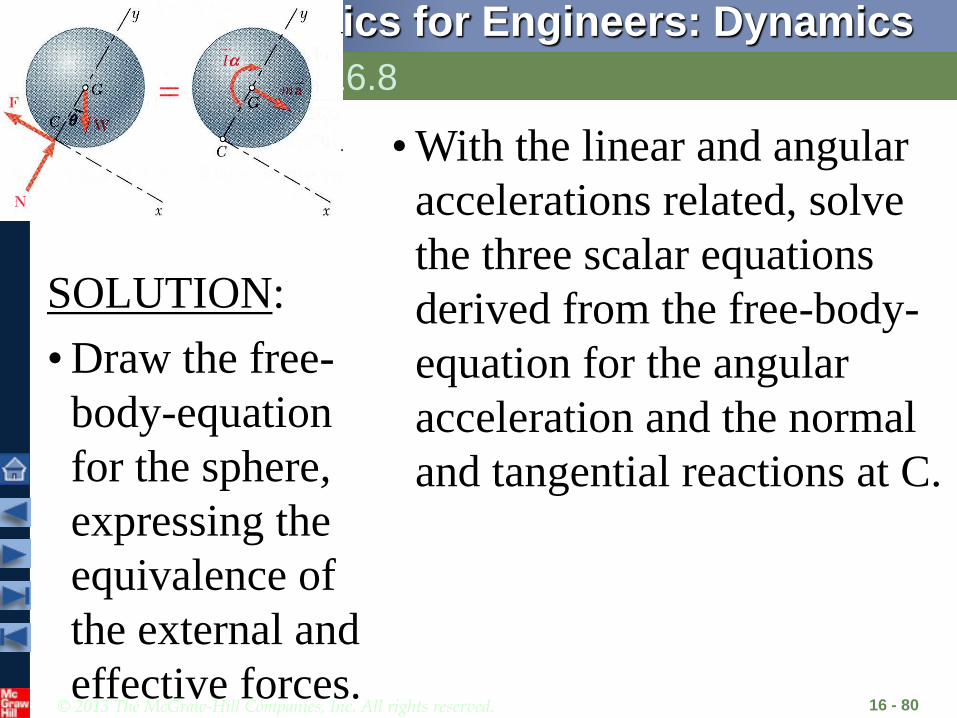
16 - 80
SOLUTION:
• Draw the free-
body-equation
for the sphere,
expressing the
equivalence of
the external and
effective forces.
• With the linear and angular
accelerations related, solve
the three scalar equations
derived from the free-body-
equation for the angular
acceleration and the normal
and tangential reactions at C.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 81
ra
q
2
2
52
5
2
sin
rg
Wrr
g
W
mrrmr
IramrW
r
g
7
sin5 q ( )2
5 sin30
7
5 9.31m s sin30
7
ga ra
°= =
°=
23.504m sa =
effCC MM

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 82
• Solve the three scalar equations derived
from the free-body-equation for the
angular acceleration and the normal and
tangential reactions at C.
r
g
7
sin5 q
23.504m sa ra= =
effxx FF
WWF
g
g
W
amFW
143.030sin7
2
7
sin5
sin
q
q
effyy FF
WWN
WN
866.030cos
0cos
q

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 83
• Calculate the friction coefficient required
for the indicated tangential reaction at C.
W
W
N
F
NF
s
s
866.0
143.0
m
m
165.0sm

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 84
r
g
7
sin5 q
23.504m sa ra= =
• Calculate the velocity after
3 m of uniformly
accelerated motion.
( )
( )( )
2 20 0
2
2
0 2 3.504m s 3m
v v a x x= + -
= +
4.59m sv =

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.8
16 - 85
effGG MM 00 I
• Assuming no friction, calculate
the linear acceleration and the
corresponding velocity after 3m.
effxx FF
( )2 2
sin
9.81m s sin30 4.905m s
WW ma a
g
a
qæ ö
= = ç ÷è ø
= ° =
( )
( )( )
2 20 0
2
2
0 2 9.81m s 3m
v v a x x= + -
= +5.42m sv =

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 86
A cord is wrapped around
the inner hub of a wheel and
pulled horizontally with a
force of 200 N. The wheel
has a mass of 50 kg and a
radius of gyration of 70 mm.
Knowing ms = 0.20 and mk =
0.15, determine the
acceleration of G and the
angular acceleration of the
wheel.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 87
SOLUTION:
• Draw the free-body-equation
for the wheel, expressing the
equivalence of the external
and effective forces.
• Assuming rolling without slipping and
therefore, related linear and angular
accelerations, solve the scalar equations
for the acceleration and the normal and
tangential reactions at the ground.
• Compare the required tangential reaction
to the maximum possible friction force.
• If slipping occurs, calculate the kinetic
friction force and then solve the scalar
equations for the linear and angular
accelerations.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 88
• Draw the free-body-equation for the wheel,.
Assume rolling without slipping,
m100.0
ra
2
22
mkg245.0
m70.0kg50
kmI

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 89
• Assuming rolling without slipping,
solve the scalar equations for the
acceleration and ground reactions.
22
2
22
sm074.1srad74.10m100.0
srad74.10
mkg245.0m100.0kg50mN0.8
m100.0m040.0N200
a
Iam
effCC MM

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 90
effxx FF
N5.490sm074.1kg50
0
2
mgN
WN
effxx FF
N3.146
sm074.1kg50N200 2
F
amF

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 91
N3.146F N5.490N
Without slipping,
• Compare the required tangential reaction to the
maximum possible friction force.
N1.98
N5.49020.0
max
NF sm
F > Fmax , rolling without slipping is
impossible.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 92
N3.146F
N5.490N
Without
slipping,
• Calculate the friction force
with slipping and solve the
scalar equations for linear and
angular accelerations.
N6.73N5.49015.0 NFF kk m
effxx FF
akg50N6.73N200
2sm53.2a

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.9
16 - 93
effGG MM
2
2
srad94.18
mkg245.0
m060.0.0N200m100.0N6.73
2srad94.18

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 94
video

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 95

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 96

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 97

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 98

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 99

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 100

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 101

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 102

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 103

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 104

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 105

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 106

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 107

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 108

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 109

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 110

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 111
The extremities of a 1.2-m rod of mass 25 kg can
move freely and with no friction along two straight
tracks. The rod is released with no velocity from
the position shown.
Determine: a) the angular acceleration of the rod,
and b) the reactions at A and B.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 112
SOLUTION:
• Based on the kinematics of the constrained
motion, express the accelerations of A, B, and
G in terms of the angular acceleration.
• Draw the free-body-equation for the rod,
expressing the equivalence of the external and
effective forces.
• Solve the three corresponding scalar equations
for the angular acceleration and the reactions
at A and B.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 113

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 114

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 115
SOLUTION:
• Based on the kinematics of the constrained motion,
express the accelerations of A, B, and G in terms of
the angular acceleration.
Express the acceleration of B as
ABAB aaa
With the corresponding vector triangle and
the law of sines yield
1.2 ,B Aa a=
1.639 1.47A Ba aa a= =
The acceleration of G is now obtained from
AGAG aaaa
where 0.6G Aa a=
Resolving into x and y components,
1.639 0.6 cos60 1.339
0.6 sin60 0.52
x
y
a
a
a a a
a a
= - ° =
= - ° = -

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 116
( )
( )
( )
22112
2
125kg 1.2m
12
3kg m
3
25 1.39 33.5
25 0.520 13.0
x
y
I ml
I
ma
ma
a a
a a
a a
= =
= ×
=
= =
= - = -
( )( )( ) ( )( ) ( )( )2
25 9.81 0.520 33.5 1.34 13.0 0.520 3
2.33rad s
a a a
a
= + +
= +
effEE MM
22.33rad sa =

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 16.10
16 - 117
effxx FF
( )( )sin 45 33.5 2.33
110.4 N
B
B
R
R
° =
=
110.4NBR = 45o
effyy FF
( ) ( )( ) ( )( )110.4 cos45 25 9.81 13.0 2.33AR + ° - = -
136.6NAR =

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 118
The uniform rod AB of weight W is released
from rest when Assuming that the friction
force between end A and the surface is large
enough to prevent sliding, determine
immediately after release (a) the angular
acceleration of the rod, (b) the normal
reaction at A, (c) the friction force at A.
SOLUTION:
• Draw the free-body-diagram and
kinetic diagram showing the
equivalence of the external forces and
inertial terms.
• Write the equations of motion for the
sum of forces and for the sum of
moments.
• Apply any necessary kinematic
relations, then solve the resulting
equations.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 119
SOLUTION: Given: WAB = W, b= 70o
• Find: AB, NA, Ff
• Draw your FBD and KD
• Set up your equations of motion
x
y
xma
I
yma
=
L/2
L/2
Ff
NA
W
70o
x xF ma y yF maf xF ma A yN mg ma
G GM I
2 2
2112
( cos(70 )) ( sin(70 ))
L LA F
AB
N F
mL
70o
• Kinematics and solve (next page)

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 120
L/2
L/2
70o
• Set up your kinematic relationships – define rG/A, aG
/
2/A /A
1( cos(70 ) sin(70 ) )
2
(0.17101 ) (0.46985 )
0 ( ) (0.17101 0.46985 ) 0
0.46985 0.17101
G A
G A AB G AB G
AB
AB AB
r L L
L L
L L
L L
i j
i j
a a r r
k i j
i j
• Realize that you get two equations from the kinematic relationship
0.46985 0.17101 x AB y ABa L a L
f xF ma A yN mg ma
• Substitute into the sum of forces equations
( )0.46985 f ABF m L (0.17101 )A ABN m L g

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 121
• Substitute the Ff and NA into the sum of moments equation
• Masses cancel out, solve for AB
• Subbing into NA and Ff expressions,
( )0.46985 0.513g
f LF m L
212 2 12
( cos(70 )) ( sin(70 ))L LA F ABN F mL
2 2
2112
[ (0.17101 )]( cos(70 )) [ ( )0.46985 ]( sin(70 ))
L LAB AB
AB
m L g m L
mL
0.513AB
g
L k
2 2 2 2 2112 2
0.17101 0.46985 ( cos(70 ))LAB AB ABL L L g
• The negative sign means is
clockwise, which makes sense.
(0.17101 0.513 )g
A LN m L g
0.912AN mg 0.241fF mg

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 122
What would be true if the floor was
smooth and friction was zero?
a) The bar would rotate about point A
b) The bar’s center of gravity would go straight downwards
c) The bar would not have any angular acceleration
= 70o
NA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Plane Motion of a Rigid Body: D’Alembert’s Principle
16 - 123
• The most general motion of a
rigid body that is symmetrical
with respect to the reference
plane can be replaced by the
sum of a translation and a
centroidal rotation.
• d’Alembert’s Principle: The
external forces acting on a rigid
body are equivalent to the
effective forces of the various
particles forming the body.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Axioms of the Mechanics of Rigid Bodies
16 - 124
• The forces act
at different points on a
rigid body but but
have the same
magnitude, direction,
and line of action.
FF and
• The forces produce the same moment about any
point and are therefore, equipollent external forces.
• This proves the principle of transmissibility
whereas it was previously stated as an axiom.
Related Documents











