Technological-based project A Comparison of the MOTION and the MECHANISM among the Mechanical Dog (71101), the Mechanical Giraffe (71105), and the.
Jan 02, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


Technological-based project

A ComparisonA Comparison
of the of the MOTIONMOTION and the and the MECHANISMMECHANISM among the Mechanical Dog (71101), the among the Mechanical Dog (71101), the
Mechanical Giraffe (71105), and the Mechanical Giraffe (71105), and the Mechanical Turtle (71106)Mechanical Turtle (71106)
Prepared by Prepared by Ng Siu Keung (24)Ng Siu Keung (24)Ng Tsz Fung (25)Ng Tsz Fung (25)Tang Chi Yung (29)Tang Chi Yung (29)Tsang Hing Siu (31)Tsang Hing Siu (31)
Project ObjectivesProject Objectives
1.1. UnderstandUnderstand the mechanism of T the mechanism of Tamiya robots.amiya robots.
2.2. CompareCompare the mechanical perf the mechanical performance of selected Tamiya roormance of selected Tamiya robots. bots.
3.3. Learn to Learn to conductconduct a a technological based project. technological based project.
4.4. UpgradeUpgrade the mechanical the mechanical performance of existing performance of existing robots.robots.
Our learning methods
• Build up the mechanical robots
• Observe their mechanism
• Observe their motions
• Design and conduct experiment to support the findings
• Group discussion
• Literature review

The Mechanical DogThe Mechanical Dog
The Mechanical GiraffeThe Mechanical Giraffe
The Mechanical TurtleThe Mechanical Turtle
Interesting Topics
1. Are the gear ratios correct
2. The relationship between the gear ratio and robot speed
3. The relationship between the gear ratio and the driving force
4. There are still rooms to upgrade the selected robots
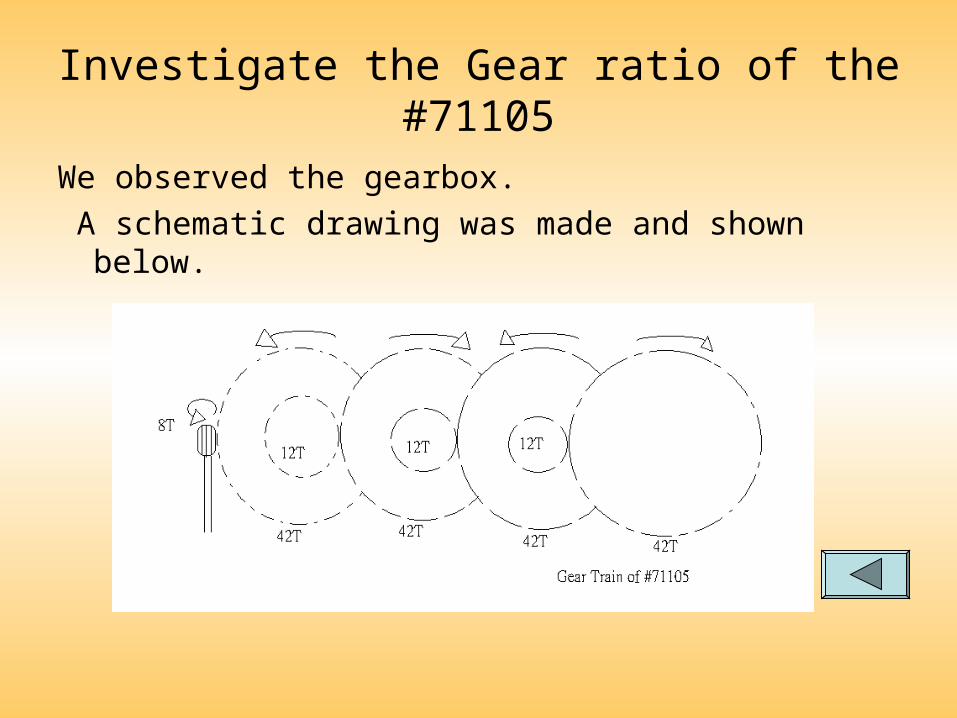
Investigate the Gear ratio of the #71105
We observed the gearbox.
A schematic drawing was made and shown below.
4-step reduction
Gear Ratio =42/8×42/12×42/12×42/12
=21/4×7/2×7/2×7/2
=203
The calculation matched the given figure in the manual.
We repeated the calculation, and accepted all gear ratios on the manual are correct.

ExperimentExperiment DesignDesign
Experiment Design
• Speed :
How fast do they run on 1m?Findings :Speed of the giraffe
=1m/50s=0.02m/s.Speed of the dog =1m/40s=0.025m/s. (correct to 2 sig. fig.)
Speed of the turtle=1m/60s=0.016m/s(correct to 2 sig. fig.)
Experiment Design
• Driving force : How long do they push 4 of chesses on 1m?
Findings :Time taken for the giraffe = 65sTime taken for the dog = 70sTime taken for the turtle = 61s
Conclusion:The blocks reduce the speed of the giraffe, dog and turtle .
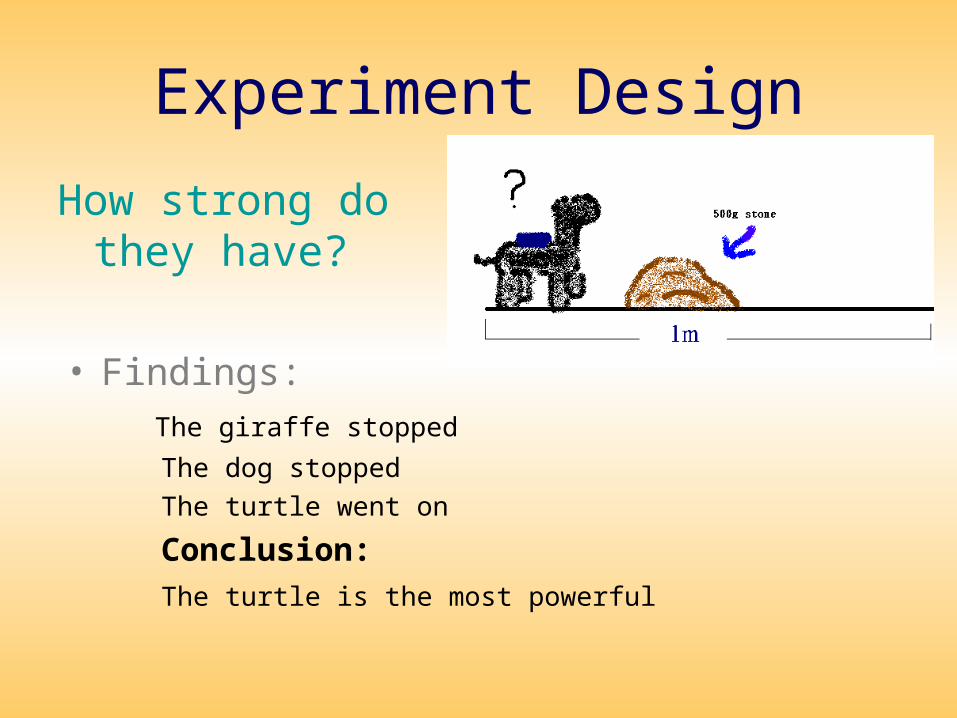
Experiment Design
How strong do they have?
• Findings: The giraffe stopped
The dog stopped
The turtle went on
Conclusion:
The turtle is the most powerful
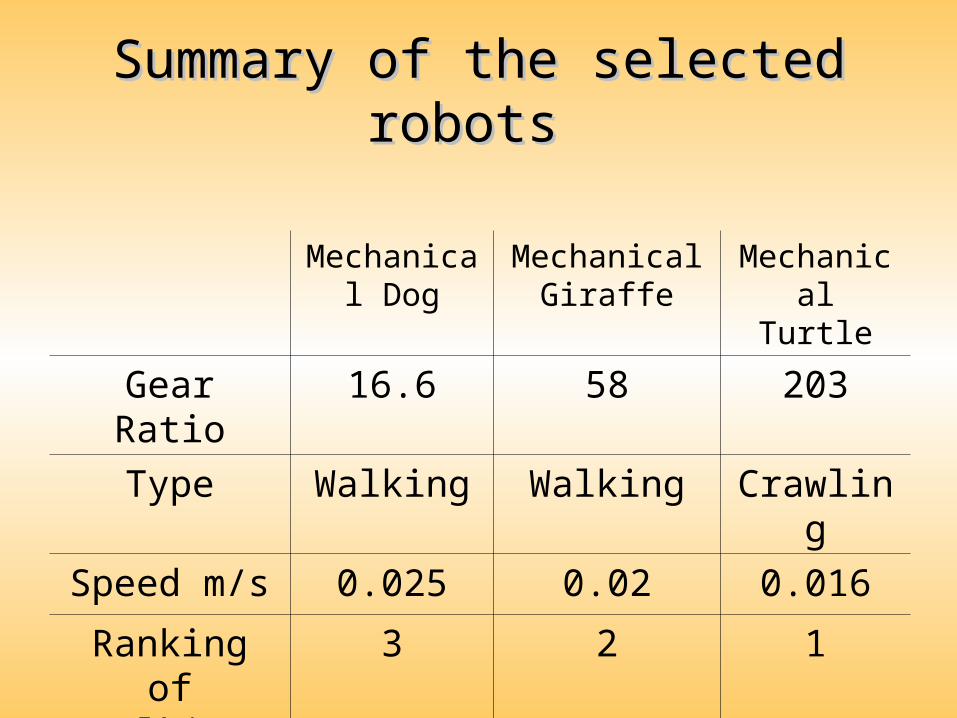
Summary of the selected Summary of the selected robotsrobots
Mechanical Dog
Mechanical Giraffe
Mechanical Turtle
Gear Ratio 16.6 58 203
Type Walking Walking Crawling
Speed m/s 0.025 0.02 0.016
Ranking of walking force
3 2 1
Conclusions
• The higher the gear ratio , the slower the movement
• The slower movement , the more driving force from the engine
• The calculation of the gear ratio is simple
Means to improve themechanical performance
After the observation and group discussion, we made the following resolutions:
• Increase the length of the legs
• Change the voltage supply
• Redesign the boots shape
• Apply WD-40 into the gear box
THE ENDTHE END
Related Documents