Team Lifted Andrew Cober Dan Crowe Sujan Gautam Anthony Schubert Ryan Yeash

Team Lifted Andrew Cober Dan Crowe Sujan Gautam Anthony Schubert Ryan Yeash.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Team Lifted
Andrew CoberDan CroweSujan GautamAnthony SchubertRyan Yeash

Magnetic Levitation
Use electromagnets to lift and control a ferromagnetic object
Control xyz position Control yaw, pitch,
and roll of specialized object

Goals
Effectively control the object with 1cm accuracyXYZ control
Control orientation within 90 degrees in all axes

Design
Four electromagnets mounted on an overhead platform
Cyclone II FPGA used to control the current to the electromagnets
Control based on IR distance sensing of the object

Specifics
DC buck converter used to control current flow to electromagnets
Software control loop used to connect IR sensors and magnets via converters
User controls object position with buttons Wood apparatus initially, convert to
aluminum at a later date

Approach
Breakup design as much as possibleHardware/Power
Construction of apparatus, PCB, and developing reliable power converters
Control Mathematical control algorithm
Software Build framework that allows control specifics to be
implemented later
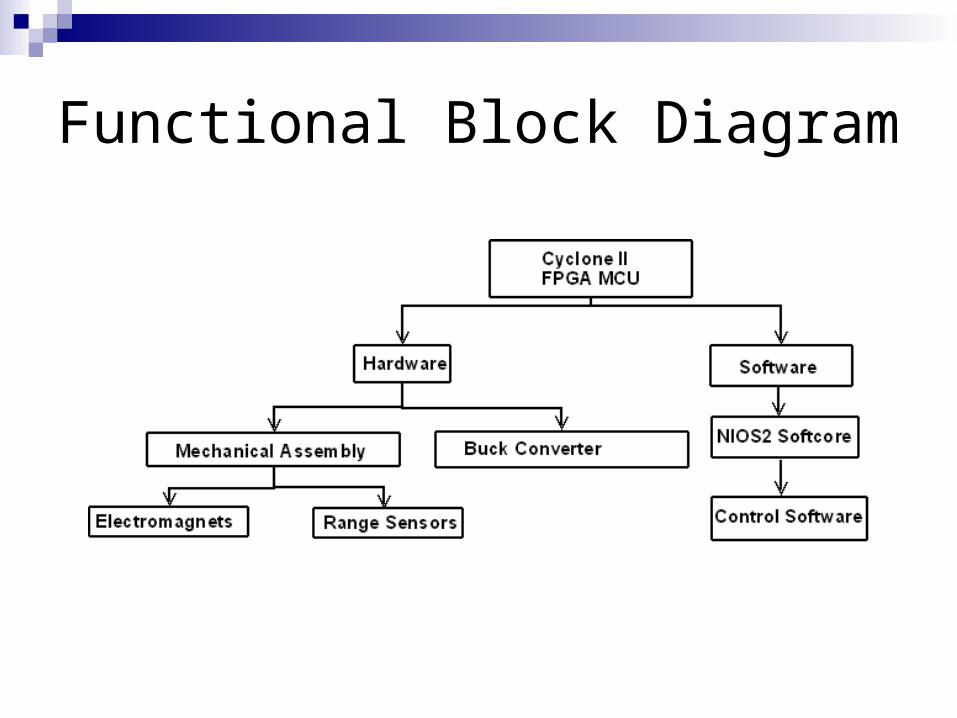
Functional Block Diagram

Hardware Block Diagram

NiosII Softcore

Software Flow Diagram

Cost Estimate
Qt. Part Attained From Ea. Cost6 Electromagnets www.solenoidcity.com $40.00 $240.004 IR Sensors www.Sparkfun.com $12.00 $48.004 Buck Converters www.solenoidcity.com $80.00 $320.004 Photo Diode DigiKey $1.00 $4.004 Photo Detectors DigiKey $1.00 $4.002 PCB-Parts and Fab. Advanced Circuits, Digikey, Mouser $70.00 $140.001 Cyclone II Dev. Board Altera $150.00 $150.00
Misc.Resistors, Capacitors, IC's Digikey $30.00Apparatus Home Depot $30.00
Total $966.00

Division of Labor
Andrew Cober
Dan CroweAnthony Schubert
Ryan YeashSujan
Gautam
Mechanical X X X
PCB X X
Power Control
X
System Modeling
X X X
Control Algorithm
X X X X
Firmware X X

Timeline Estimate



Milestones
One week: Complete research, finalize feasibility CDR: Obtain all parts, PCB design completed,
develop software framework M1: Get an object to hover in the middle of 1sqft.
area M2: Control xyz coordinates of the object Expo: Control orientation and completion of
project

Risks
Power limitations into the magnets may limit object size and levitation height
Control complexity may be too difficult to implement
FPGA may be too complex

Contingency Plans
Scale back to control over only the spatial coordinate, not the orientation
Control an object on a surface rather than mid air
Use photo diodes rather than IR sensors for object position
Rescale from FPGA to MSP

Possible Extensions
Addition of LCD to display object dataTouchscreen for user controlTrackball control
Wireless communication between apparatus and user interface
Implement multi-core processing on Cyclone II

Questions
?
Related Documents