0045-7!349(%)00113-1 Compurers dr Sfrucrures Vol. 58, No. 5, pp. 1031-1043. 1996 Elscvier Science Ltd Printed in Gnat Britain 0045-7949/96 $15.00 + 0.00 TANGENTIAL LOADING TRANSPORTATION BETWEEN ROLLER AND FLAT WITH MODIFIED COULOMB FRICTION-A THREE-DIMENSIONAL ROLL-CONTACT CALCULATION WITH THE FINITE ELEMENT METHOD? L. Qiao, M. Hillmann and R. Siinkel INPRO Innovationsgesellschaft fiir fortgeschrittene Produktionssysteme in der Fahrzeugindustrie mbH, Niirnberger StraBe 68/69, 10787 Berlin, Germany (Received 21 May 1994) Abstract-This paper concerns the steady state roll contact between elastic cylinder and rigid plane with modified Coulomb’s law of friction. A three-dimensional contact algorithm with the help of the finite element method is used for this problem. The stresses on the contact surface are displayed graphically. From the results we know that the friction will influence the distribution of pressure on the contact area and the contact region may be divided into multiphase stick-slip zones. INTRODUCTION Rolling contact is a very important problem in engineering, since it is fundamental to the design of rotating machine parts, gears, rollers and tires. How- ever, the majority of earlier papers concerning the problem of rolling contact deals only with the ap- proximations of rolling contact using modifications of static Hertz contact theory. Until recently, with the development of numerical methods, a lot of results have been published from different authors. For example, some of the important works of Kalker [l], Johnson [2], Kikuchi and Oden [3] have to be mentioned. One of the very important aspects of rolling con- tact is the tangential loading transportation between the two contact bodies by friction. This problem is difficult to solve even with simple Coulomb fric- tion, especially when it is considered in the three- dimensional situation. For the rolling contact of two bodies the contact zone will be divided into sliding and sticking segments. Mostly this problem is sim- plified to the plane strain case, ignoring some very important features of this problem. For example, the footprint shape and the size of the contact zone. In this paper we will use the finite element method t This paper is presented by the Numerical Process Simu- lation Department of INPRO. INPRO is a subsidiary of the companies Daimler-Benz AG, Hoechst AG, Krupp/Hoesch Automotive GmbH, Siemens AG, Voest Alpine Stahl AG, Volkswagen AG and the Senate of Berlin. to study the tangential loading transportation of the three-dimensional steady state rolling contact of an elastic cylinder (roller) on a rigid plane (flat) with a modified Coulomb’s law of sliding friction in detail. The variables are the geometric parameters, the ma- terial parameters, the friction coefficient and the rolling situations of the roller. FUNDAMENTAL THEORY OF ELASTIC ROLLING CONTACT WITH FRICI’ION Rolling contact was defined as a relative angular motion between two bodies in contact about an axis parallel to their common tangent plane. Here we study a roller-flat system, a cylindrical body in con- tact with a plane body. It rolls with angular velocity R around the x-axis and with velocity V along the y-axis at the same time. When V = R. R, the motion is referred to as free rolling. When V # R. R, the motion is referred to as tractive rolling while it is accompanied by sliding. We introduce here some of the analytical results for plane strain situation. This will be verified with numerical results. For frictionless situations, there are no tangential stresses along a contact surface. The normal contact stresses and deformations are given by Hertz theory. For plane strain situations, the calculation formulas are summarized as follows: (1) half-contact-width (1) 1031

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

0045-7!349(%)00113-1
Compurers dr Sfrucrures Vol. 58, No. 5, pp. 1031-1043. 1996 Elscvier Science Ltd
Printed in Gnat Britain 0045-7949/96 $15.00 + 0.00
TANGENTIAL LOADING TRANSPORTATION BETWEEN ROLLER AND FLAT WITH MODIFIED COULOMB
FRICTION-A THREE-DIMENSIONAL ROLL-CONTACT CALCULATION WITH THE FINITE ELEMENT METHOD?
L. Qiao, M. Hillmann and R. Siinkel
INPRO Innovationsgesellschaft fiir fortgeschrittene Produktionssysteme in der Fahrzeugindustrie mbH, Niirnberger StraBe 68/69, 10787 Berlin, Germany
(Received 21 May 1994)
Abstract-This paper concerns the steady state roll contact between elastic cylinder and rigid plane with modified Coulomb’s law of friction. A three-dimensional contact algorithm with the help of the finite element method is used for this problem. The stresses on the contact surface are displayed graphically. From the results we know that the friction will influence the distribution of pressure on the contact area and the contact region may be divided into multiphase stick-slip zones.
INTRODUCTION
Rolling contact is a very important problem in engineering, since it is fundamental to the design of rotating machine parts, gears, rollers and tires. How- ever, the majority of earlier papers concerning the problem of rolling contact deals only with the ap- proximations of rolling contact using modifications of static Hertz contact theory. Until recently, with the development of numerical methods, a lot of results have been published from different authors. For example, some of the important works of Kalker [l], Johnson [2], Kikuchi and Oden [3] have to be mentioned.
One of the very important aspects of rolling con- tact is the tangential loading transportation between the two contact bodies by friction. This problem is difficult to solve even with simple Coulomb fric- tion, especially when it is considered in the three- dimensional situation. For the rolling contact of two bodies the contact zone will be divided into sliding and sticking segments. Mostly this problem is sim- plified to the plane strain case, ignoring some very important features of this problem. For example, the footprint shape and the size of the contact zone.
In this paper we will use the finite element method
t This paper is presented by the Numerical Process Simu- lation Department of INPRO. INPRO is a subsidiary of the companies Daimler-Benz AG, Hoechst AG, Krupp/Hoesch Automotive GmbH, Siemens AG, Voest Alpine Stahl AG, Volkswagen AG and the Senate of Berlin.
to study the tangential loading transportation of the three-dimensional steady state rolling contact of an elastic cylinder (roller) on a rigid plane (flat) with a modified Coulomb’s law of sliding friction in detail. The variables are the geometric parameters, the ma- terial parameters, the friction coefficient and the rolling situations of the roller.
FUNDAMENTAL THEORY OF ELASTIC ROLLING CONTACT WITH FRICI’ION
Rolling contact was defined as a relative angular motion between two bodies in contact about an axis parallel to their common tangent plane. Here we study a roller-flat system, a cylindrical body in con- tact with a plane body. It rolls with angular velocity R around the x-axis and with velocity V along the y-axis at the same time. When V = R. R, the motion is referred to as free rolling. When V # R. R, the motion is referred to as tractive rolling while it is accompanied by sliding. We introduce here some of the analytical results for plane strain situation. This will be verified with numerical results.
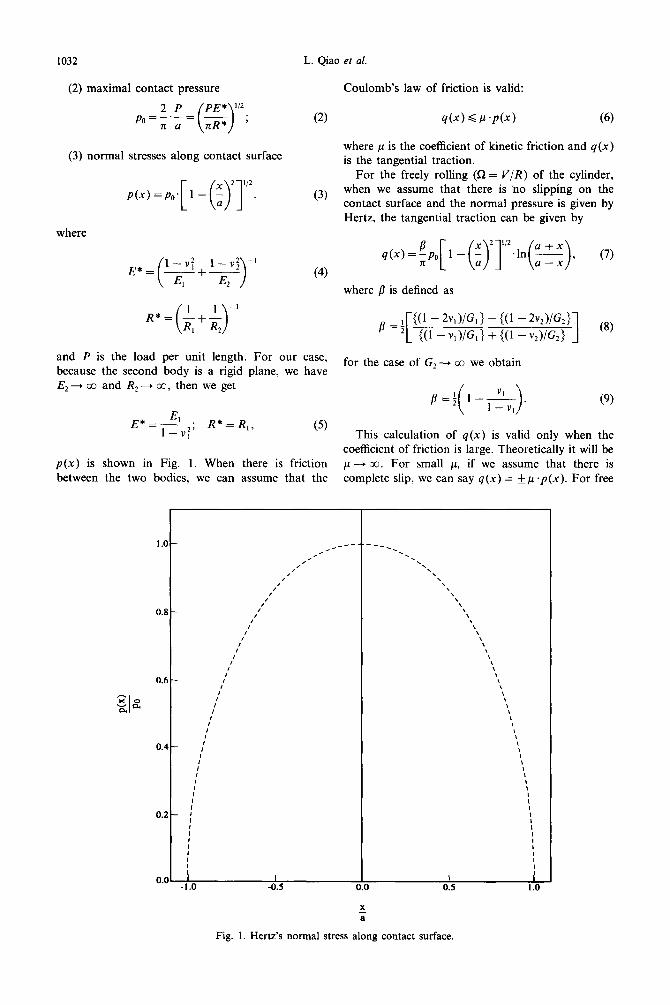
For frictionless situations, there are no tangential stresses along a contact surface. The normal contact stresses and deformations are given by Hertz theory. For plane strain situations, the calculation formulas are summarized as follows:
(1) half-contact-width
(1)
1031
1032
(2) maximal contact pressure
(3) normal stresses along contact surface
x 2
[ 01 l/2
P(X) =po 1 - ; 3
where
L. Qiao et al.
Coulomb’s law of friction is valid:
(2) q(x) G P .P(X) (6)
where p is the coefficient of kinetic friction and q(x) is the tangential traction.
For the freely rolling (a = V/R) of the cylinder,
(3) when we assume that there is no slipping on the contact surface and the normal pressure is given by Hertz, the tangential traction can be given by
(4)
q(x) = :a[ I- (~~~.ln~~),
where b is defined as
p =; ((1 -2v,)/G11 -{(I -2v2WzJ
((1 - VIW,) + ((1 - v2YG2) 1 and P is the load per unit length. For our case, because the second body is a rigid plane, we have
for the case of G, - cc we obtain
E2+ co and R, + 03, then we get
E.
(7)
(8)
(9)
E*= -Zi. R*=R,, 1 -vi’ (5)
This calculation of q(x) is valid only when the coefficient of friction is large. Theoretically it will be
p(x) is shown in Fig. 1. When there is friction p -+ co. For small p, if we assume that there is between the two bodies, we can assume that the complete slip, we can say q(x) = fp .p(x). For free
1.
0.
0.
$2
0.
0.
0.
o-
8-
6-
4-
2-
O-
.c *_--
/’ /’
,I’ /’
I’ I’
: : : : : :
I I
J
.\ \ ‘\ \ \ ,
\ \ \ \ \ I
Fig. 1. Hertz’s normal stress along contact surface.

Tangential loading transportation 1033
11’ /’
I’ I’
I’
x a
I I 0.5 I.0
Fig. 2. Tangential tractions of free rolling along contact surface: (a) full sticking, (b) full slipping.
0.15 -
0.10 -
0.05 -
\ (a) I
X
a
; I
I I
0.5 1.0
Fig. 3. Tangential tractions of static tractive rolling along contact surface: (a) no slipping, (b) part slipping.
1034 L. Qiao et al.
1
I I
\, 6-4
0.15- : \ \ \ \ \ \
(b)
--__ --_
-0.05
-0.10
-0.15 1 _o.20L
-1.0 -0.5
\---,
-- ------
-------- --__ ---
I I
0.5 I.0
X
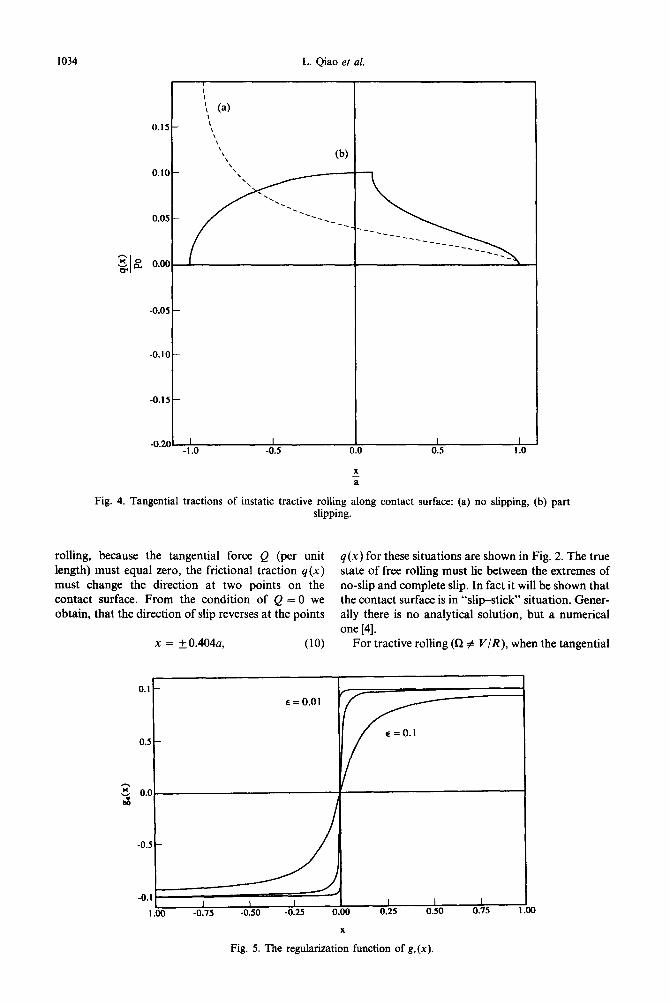
a Fig. 4. Tangential tractions of instatic tractive rolling along contact surface: (a) no slipping, (b) part
slipping.
rolling, because the tangential force Q (per unit q(x) for these situations are shown in Fig. 2. The true length) must eqtal zero, the frictional traction q(x) state of free rolling must lie between the extremes of must change the direction at two points on the no-slip and complete slip. In fact it will be shown that contact surface. From the condition of Q = 0 we the contact surface is in “slip-stick” situation. Gener- obtain, that the direction of slip reverses at the points ally there is no analytical solution, but a numerical
one [4]. x = f0.404a, (10) For tractive rolling (Cl # V/R), when the tangential
Fig. 5. The regularization function of g,(x).

Tangential loading transportation 1035
force of Q (per unit length) is greater than the force of limiting friction p . P, that means Q > p. P, there will be only sliding between the contact surfaces. The tangential traction is given by
x 2
[ 01 l/2
q(x)= -+p..p(x)= +P.‘po 1 - ; > (11)
the negative sign is associated with a positive vel- ocity. When Q < p. P, there will be no slip or only part slip on the contact surface. If there is no slip, the tangential fraction is given by
q(x)= Q @2 _ x2)li2’ (12)
It rises to a theoretically infinite value at the edges of the contact that is true only if p -+ co.
This means that in the real situation there must be some micro-slip. It is given as follows:
x 2
[ 01 112
dx)=P.Po I-- ; ; c<lx(<a
q(x)=ir.~,(l-(~)2)1;2-~(1-(f)?~: 1x1
< c.
That means that at the edges of the contact c~lxl~aitisinaslipsituationandwhenlxl<c it is in a stick situation. The value of c is given by
c=a. 1-S ! > l/2
(13)
The tangential traction q(x) of this situation is shown in Fig. 3. Now we consider the unstatic rolling situation which transmits a resultant tangential force Q through friction at the interface, when the roller is
Fig. 6. Calculation model of rolling roller.
Fig. 7. Finite element mesh used for two-dimensional calculation.
accelerated or braked. In the static case, there is a central stick region with equal regions of slip on either side. But now the stick region will be located adjacent to the leading edge of the contact and slip will be confined to a single zone at the trailing edge. Generally there is no analytical result for this situ- ation, but with large friction conditions, it can be calculated with the results of an elastically similar situation. The tangential traction is given by
dx)=lrp,{[ 1 -(q--y _c 12
a [ ( + d - ; -a<x<c c
-d
q(x) = PPO
< a,
2 l/2
: 01 1-x ; c-d<x
a
where the value d is given by
Under conditions of large friction and Q KP. P, the slip region at the trailing edge becomes vanish- ingly small and the distribution of the tangential traction approaches the limit form (Fig. 4):
q(x)=po a+x Q 2 (02 _ ,2)1/2~,~ (19
1036 L. Qiao et al.
When we consider the roller in the three-dimen- sional situation, it will be much more complex. Contact is made on a complex form, the shape of the stick and slip zones are not known. Because of the difficulty, we will use the finite element method to solve this problem.
A CONTACT ALGORITHM FOR THE FINlTE EEEMENT METHOD
In recent developments concerned with the finite element method, several kinds of contact algorithms have been considered. For example, the deformable- body-against-undeforable-body with Coulomb’s law of friction contact algorithms, that can be used to establish the nonlinear boundary conditions to solve the roll contact problem.
As we have already seen, usually the stick-slip description of two body contact is based on Cou- lomb’s law of friction. A significant property of this law is that the friction function is noncontinuous and nondifferentiable. This property is especially trouble- some for numerical algorithms. From the mechanical point of view, Coulomb’s law leads to a strict separ- ation of sticking and slipping regions of the contact surface. This means there is a point (two-dimensional contact) or a curve (three-dimensional contact) which
separates the sticking from the slipping region. Physi- cal experiments show that no such point or curve actually exists, but there is a boundary layer between regions of full slipping and full sticking. Because of this fact, different regularization functions are suggested which lead to a representation of such a boundary layer and at the same time avoid the nondifferentiability of Coulomb’s law. In our work we will use the following regularization function (Fig. 5):
X &(x)=i.tan-I T
0
.
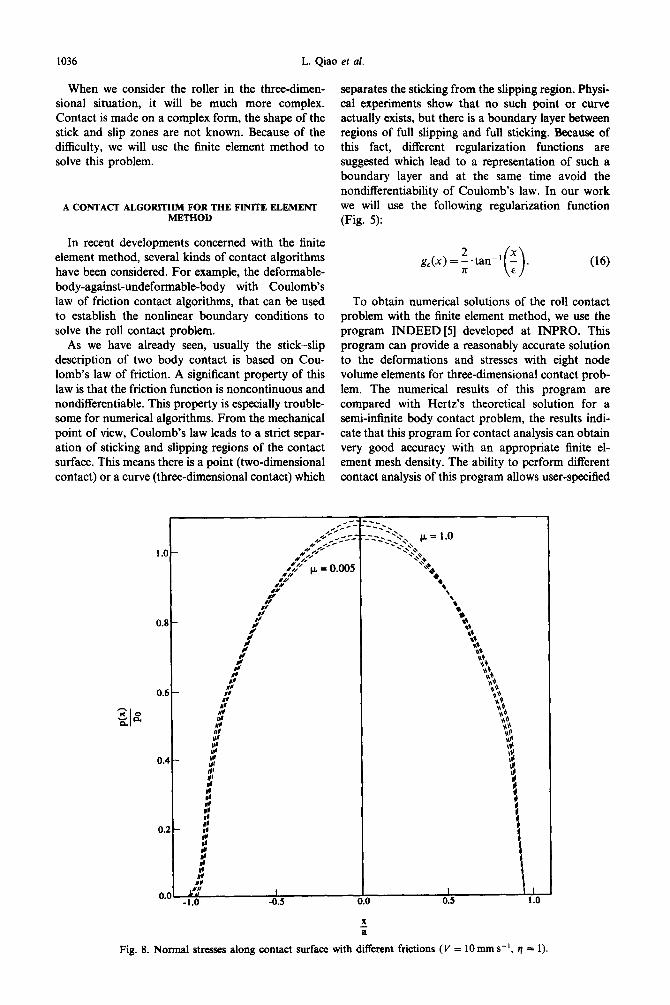
To obtain numerical solutions of the roll contact problem with the finite element method, we use the program INDEED [5] developed at INPRO. This program can provide a reasonably accurate solution to the deformations and stresses with eight node volume elements for three-dimensional contact prob- lem. The numerical results of this program are compared with Hertz’s theoretical solution for a semi-infinite body contact problem, the results indi- cate that this program for contact analysis can obtain very good accuracy with an appropriate finite el- ement mesh density. The ability to perform different contact analysis of this program allows user-specified
Fig. 8. Normal stresses along contact surface with different frictions (V = 10 mm S-‘, q = 1).
Tangential loading transportation 1037
boundary conditions to perform the static rolling situation of a roller. A quasi-static incremental non- linear finite element roll contact analysis is then performed using the nonlinear formulation, allowing for small strains with large displacements. The non- linear analysis is required, because of the large dis- placements associated with the roller rotation and the changing boundary conditions associated with contact analysis. At each increment of rolling, the roller is evaluated for surface contact and the con- tact boundary conditions are changed until the contact convergence criteria are satisfied. This con- tact algorithm is described in more detail in the following.
For numerical solutions to the contact problem, the equilibrium equation has to be solved taking into account inequality constraints. These inequality con- straints are treated with an active set strategy. This means a distinction is made between nodes which have contact to the rigid body and nodes which are free. The nodes which have contact form the activity set of nodes. This leads to the following formulation of the contact problem.
(1) Contact and release conditions: (a) nodes which are in contact must have pressure forces, (b) free nodes may not have penetrations with rigid body.
(2) Equilibrium equation
G(x, i, t) = F(x, t) - R(x, .$ t) = 0
where x are the total displacements, F(x, t) are the internal forces and R(x, 1, t) are the frictional forces of the nodes which are in contact. If node k has contact, the friction force Rk at this node is defined by
Vk Rk= -P llF:ll ii.gc(ll Vkll) (17)
with p is the friction coefficient, Ff is the contact normal force of node k, Vk is relative velocity of node k, g, is the regularization function.
The equilibrium equation is solved with continu- ation methods for the parameter of time t. Assume (x0, i,, to) is a solution at time t,
G(x,, &, to) = 0. (18)
For a given time step At the unknown Ax has to be determined by the equation
x,+Ax,$t,,+A~ =O, (19)
where i is replaced by Ax/At. This equation is solved with predictor-corrector method. A tangential step is
0.15 -
0.10 -
0.0s -
-o.20m I I
0.5 1.0
X
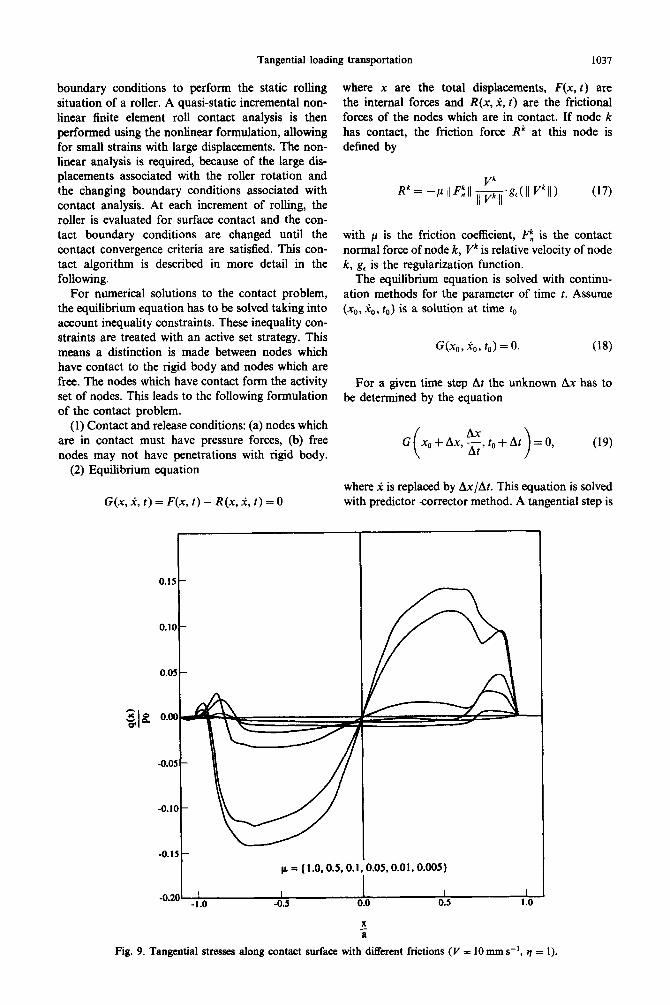
a Fig. 9. Tangential stresses along contact surface with different frictions (V = 10 mm s-‘, q = 1).
1038 L. Qiao et al.
used in predictor and the corrector is carried out with Newton-techniques:
Predictor
CALCULATION MODEL AND RESULTS
Here we consider the steady-state rolling of a cylinder of radius R, and width B, rolling with a constant velocity V0 along a fixed, rigid plane. The
Ax0 = -AtD,G(x,, 1,, to)-‘D,G(x,, i,, to); (20) cylinder is bonded to a rigid cylindrical axle of radius Ri rotating with a constant angular velocity R. Via the
Corrector
fori=0,1,2,...do
-1. G x~+Ax’,~,~~+A~ [( )I
where 1’ is determined by a line-search, until
x~+Ax’+~,~,~~+A~ >
=0
is satisfied with a given tolerance.
axle the load F presses the cylinder down on the rigid plane. Since the motion is steady-state, an observer riding along with the cylinder will see the same deformed geometry at all times. In general this is a dynamic problem, but because of the limited roll velocity, the dynamic effect will be very small. When the rotatory inertia effect of the roller is ignored, we can apply the quasi static calculation for this prob- lem. The calculation model of the steady-state rolling
(21) is shown in Fig. 6. This quasi static calculation model consists of three parts: (1) a rigid shaft which has the
(22) velocity of V, in the y-direction and rolling with angular velocity of Q (2) a roller as an elastic body combined with the rigid shaft and contacted with a rigid flat; (3) a rigid flat.
First of all we calculate a two-dimensional situ- ation with different friction coefficients p and differ- ent ratio tj:
R.R q=L
VO (23)
.o -
.8 -
1.6 -
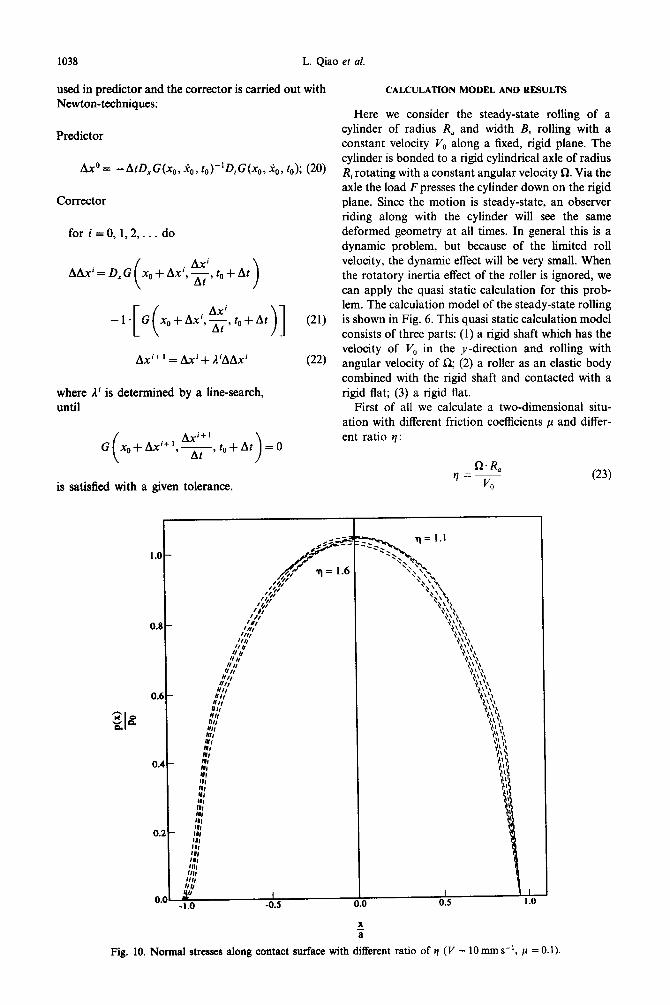
Fig. 10. Normal stresses along contact surface with different ratio of q (V = 10 mm s-‘, p = 0.1).
Tangential loading transportation 1039
q= (1.1. 1.2. 1.3, 1.4, 1.5, 1.6)
-0.10 -
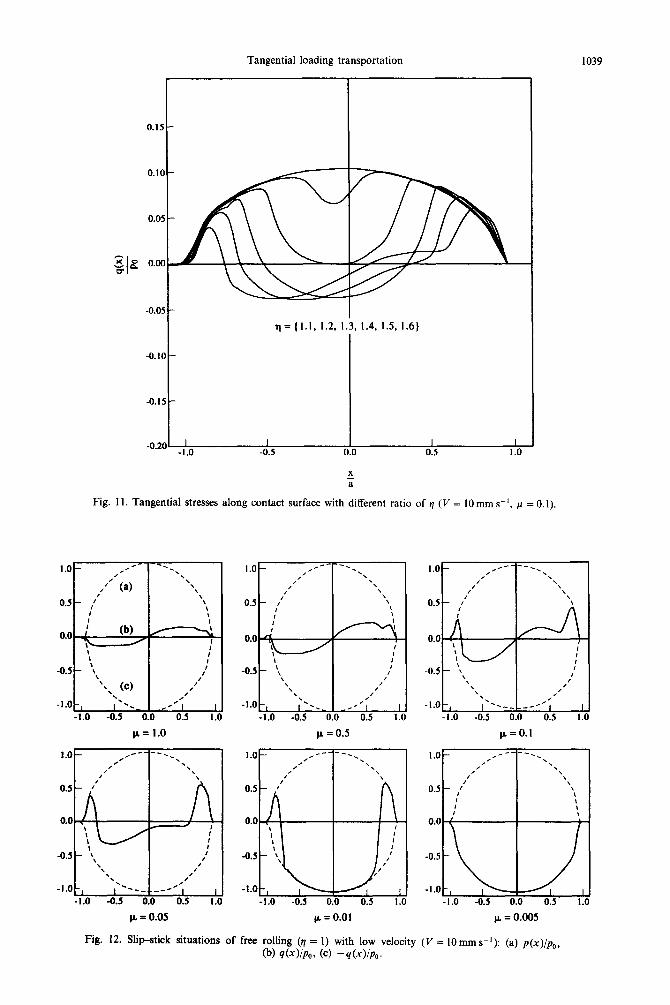
Fig. 11. Tangential stresses along contact surface with different ratio of v (V = 10 mm s-‘, p = 0.1).
1.0 - ,.d -..
,f “(a) ‘\\ \ \ \ 0.5 - 11’ \ \ : \
I I
0.0 : ‘zc (b) /- I
, \
:
-0.5 - ‘, : \ ‘h\, (4 /’
,’ -1.0 -, --. __.‘I _
-1.0 -0.5 0.0 0.5 I
c= 1.0
l.O- /’
_-- --__
,I’ ‘\
‘\ \
‘\ ‘\ ,/’
-1.0 -, --s_ _ e-c .’
-1.0 -0.5 0.0 0.5 1
I.0 - ,.* -._ ,
,/’ ‘\
‘\
0.5 - /I/ \ \ \ \
I
I
-0.5 - \ : \ I’ ‘\ I’
I’ -1.0 -,
‘\ ‘.._ *,’ I
-1.0 -0.5 0.0 0.5 1.0
p = 0.5
l.O- I’
,e- --__ ‘\
I’ ‘1 \
I I I 1 :
-0.5 - ‘\\ :
-1.0 -, I -1.0 -0.5 0.0 0.5 1.0
p = 0.05 p, = 0.01 p, = 0.005
Fig. 12. Slip-stick situations of free rolling (q = 1) with low velocity (V = 10 mm SC’): (a) p(x)/p,,
W q(xMo, (cl -dxYP,.
l.O- _*- --._ /’ ‘\
I’ \ \
0.5 - i’ \ \ \
-0.5 - ‘1 \ \ I’ \ ‘\
I’
-1.0 -, ‘.-__ .I’ r_-* I -1.0 -0.5 0.0 0.5 I.1
p=O.l
1.0 - ,__- ---- I ‘\
,/’ ‘\ \
0.5 - 1’ \ \ : \
\ : I \
-1.0 -0.5 0.0 0.5 I.
L. Qiao et al.
\ \ ‘\ /’
-1.0 ‘. ,’ -LO-, '. ,' -, _m_ _*a I c__ __c I -1.0 -0.5 0.0 0.5 1.0 -1.0 -0.5 0.0 0.5 1.0 -1.0 -0.5 0.0 0.5 I.0
q = 1.1 q= 1.2 q= 1.3
\ I
\ I :
\ I \ :
1 \
:
\ : I
-0.5 - :, If \
-0.5 - '\ I' -0.5 - '\ : I' \ \
/' \ \ I'
\ '\
\ /' '. '\ /'
-1.0 -, . .._ -0' _ _-' I -1.o-, .c-__ __'
MM' '. ,' j_ -l.O-, ______-' I
-1.0 -0.5 0.0 0.5 1.0 -1.0 -0.5 0.0 0.5 1.0 -1.0 -0.5 0.0 0.5 1.0
q=l.4 q=lS q= 1.6
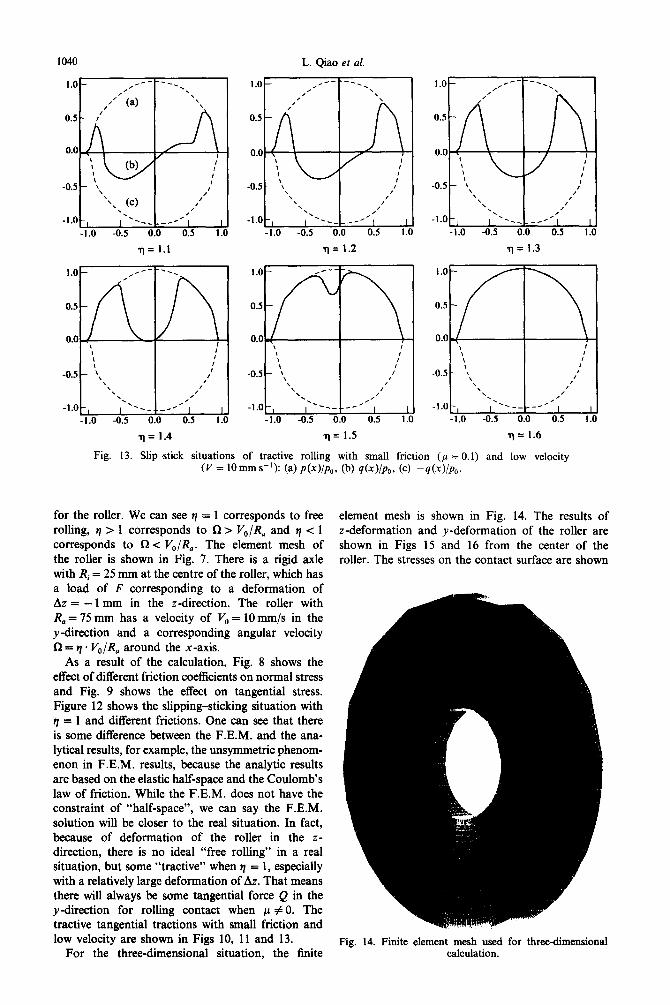
Fig. 13. Slipstick situations of &active rolling with small friction (p = 0.1) and low velocity (V = lomms-‘): (a) P(x)/P~, (b) q(x)/p,, (c) -_q(x)/p,.
for the roller. We can see q = 1 corresponds to free rolling, q > 1 corresponds to LI > V,,/R, and 1 < 1 corresponds to fi < V,JR,. The element mesh of the roller is shown in Fig. 7. There is a rigid axle with Ri = 25 mm at the centre of the roller, which has a load of F corresponding to a deformation of AZ = - 1 mm in the z-direction. The roller with R, = 75 mm has a velocity of V, = lOmm/s in the y-direction and a corresponding angular velocity R = q. V,/R, around the x-axis.
As a result of the calculation, Fig. 8 shows the effect of different friction coefficients on normal stress and Fig. 9 shows the effect on tangential stress. Figure 12 shows the slipping-sticking situation with t] = 1 and different frictions. One can see that there is some difference between the F.E.M. and the ana- lytical results, for example, the unsymmetric phenom- enon in F.E.M. results, because the analytic results are based on the elastic half-space and the Coulomb’s law of friction. While the F.E.M. does not have the constraint of “half-space”, we can say the F.E.M. solution will be closer to the real situation. In fact, because of deformation of the roller in the z- direction, there is no ideal “free rolling” in a real situation, but some “tractive” when q = 1, especially with a relatively large deformation of AZ. That means there will always be some tangential force Q in the y-direction for rolling contact when p # 0. The tractive tangential tractions with small friction and low velocity are shown in Figs 10, 11 and 13.
For the three-dimensional situation, the finite
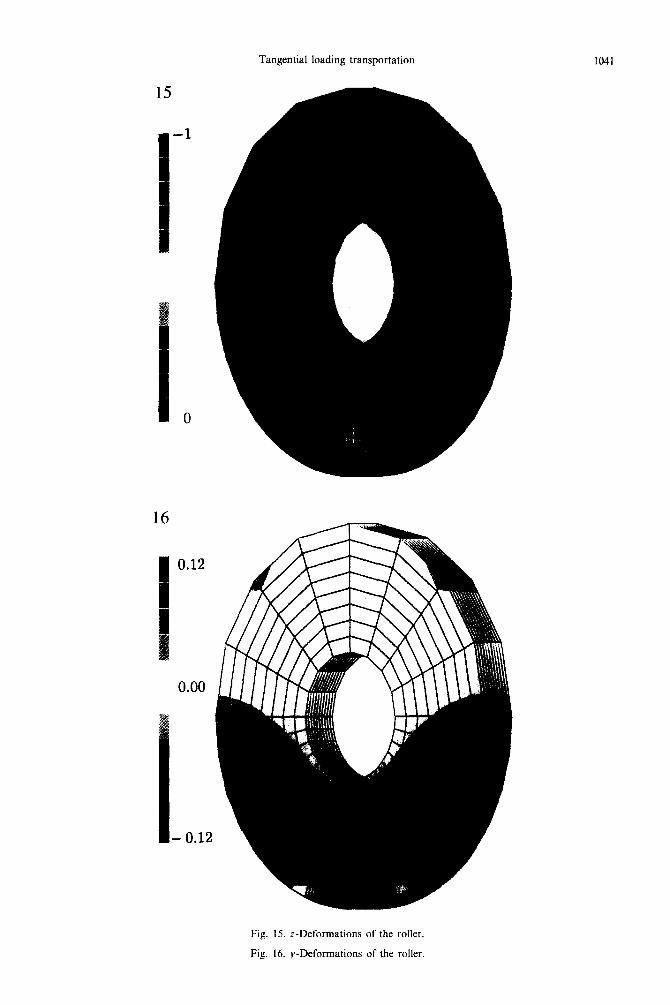
element mesh is shown in Fig. 14. The results of z-deformation and y-deformation of the roller are shown in Figs 15 and 16 from the center of the roller. The stresses on the contact surface are shown
Fig. 14. Finite element mesh used for three-dimensional calculation.
15
-1
16
Tangential loading transportation 1041
Fig. 15. z-Deformations of the roller.
Fig. 16. y-Deformations of the roller.

1042 L. Qiao et al.
Fig. 17. Three-dimensional stress on contact surface with small friction(p =O.l): (a) normal stresses (p/p,), (b) shear stress on axle direction (qr/pa), (c) shear stress on roll direction (q,/po).
Fig. 18. Three-dimensional stress on contact surface with large friction (p = 0.5): (a) normal stresses (p,/p,), (b) shear stress on axle direction (qv/po), (c) shear stress on roll direction (q,/p”).

Tangential loading transportation 1043
in Figs 17 and 18. One can see that for large friction cost about 6000 CPU-s on a CRAY YMP/EL mini- (p = 0.5) the pressure on the sides is larger than in the supercomputer. This is very suitable for engineering center (Fig. 18) and for small friction (/J = 0.1) the design. pressure on the sides is smaller than in the center (Fig. 17). REFERENCES
CONCLUSION
Rolling contact is a very important technical prob- lem, but it is very difficult to solve even with numeri- cal methods, especially for the three-dimensional situation. In our work we solved this problem with the program INDEED, a special purpose finite el- ement program developed for the simulation of three- dimensional forming processes in the automotive industry, and have achieved very good results. The finite element mesh includes about 8900 nodes and 7400 eight node volume elements. Each calculation
1. J. J. Kalker, Three-Dimensional Elastic Bodies in Rolling Contact. Kluwer Academic, Dordrecht (1990).
2. K. L. Johnson, Contact Mechanics. Cambridge Univer- sity Press, Cambridge (1985).
3. N. Kikuchi and J. T. Oden. Contact Problems in Elas- ticity. SIAM, Philadelphia, ‘PA (1988).
4. R. H. Bentall and K. L. Johnson, Slip in the rolling contact of two dissimilar elastic rollers. Int. J. mech. Sci. 9, 389401 (1967).
5. M. Hillmann, F. Fuchs, A. Kabisch, K. Kassem, F. Mathiak, R. Stinkel and A. Stalmann. Mathematical modelling and numerical simulation of sheet metal forming process with INDEED. In: Proc. 6th Int. Kongrej Berechnung Im Automobilbau, Wiirzburg. VDI Berichte 1007 (1992).
Related Documents











