Taller de Fabricación DE Robots CON D2 ORGANIZA: COLABORAN:

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Taller de Fabricación DE Robots CON
D2
O R G A N I Z A : C O L A B O R A N :
SUMARIO 2ª SESIÓN
• MOTORES
• SALIDAS ANALÓGICAS
• SENSORES distancia

• MOTORES CC
• puente en h
• L298
MOTORES cc

MOTORES CC
Características:
• Son económicos
• Permiten regular su velocidad en función de
su tensión de alimentación
• Invierten el sentido de giro en función de su
polaridad
• Pueden necesitar un circuito de potencia cc "

MOTORES CC
Inversión de giro mediante puente en H "

L298
Inversión de giro mediante puente en H y
L298 "
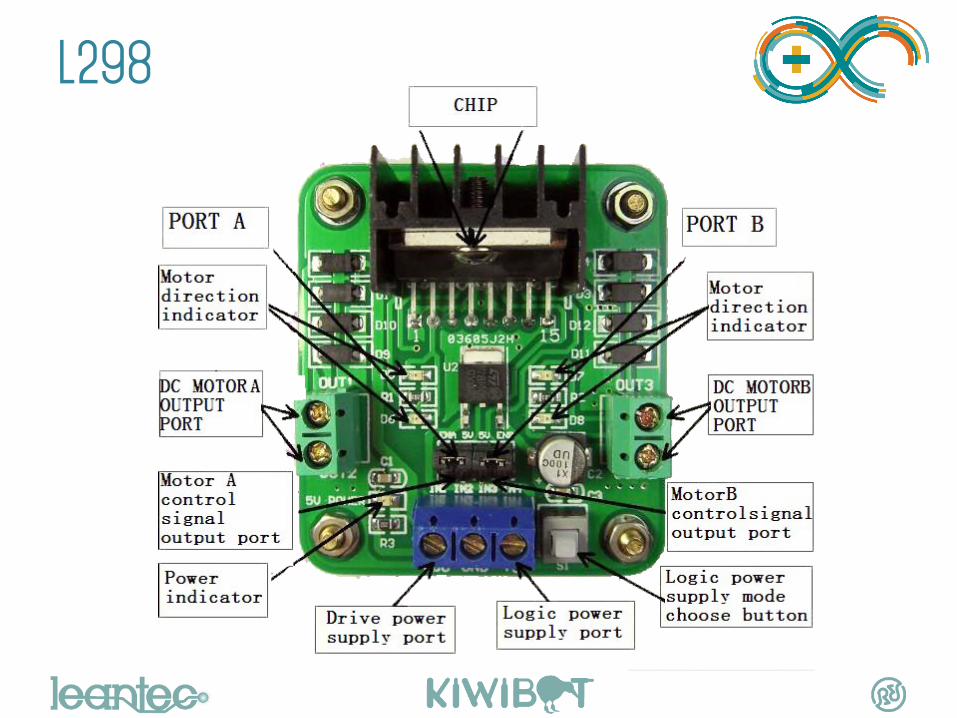
L298
"

PRÁCTICAS MOTORES
• CONTROLAR UN MOTOR SENTIDO DE GIRO
• CONTROLAR VEHICULO 4 SENTIDOS DE
GIRO
• AÑADIR LLAMADA A FUNCIONES
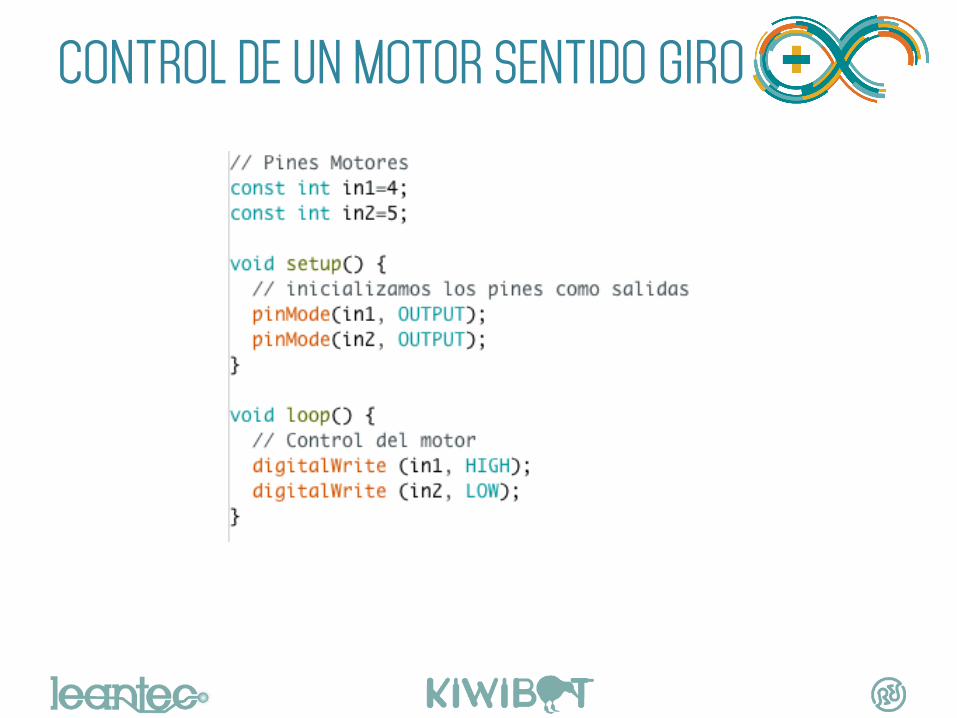
CONTROL DE UN MOTOR SENTIDO GIRO
"
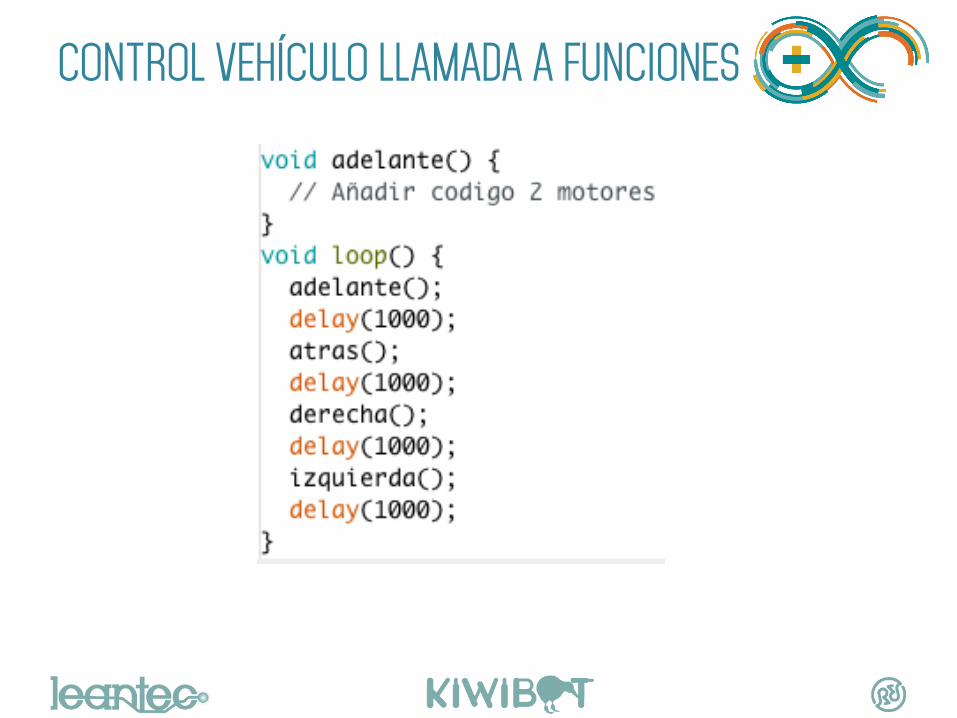
CONTROL VEHÍCULO LLAMADA A FUNCIONES
"
• SALIDAS ANALÓGICAS
• CONTROLAR POTENCIÓMETRO SALIDA ANALÓGICA
SALIDAS ANALÓGICAS
SALIDA ANALÓGICA pwm
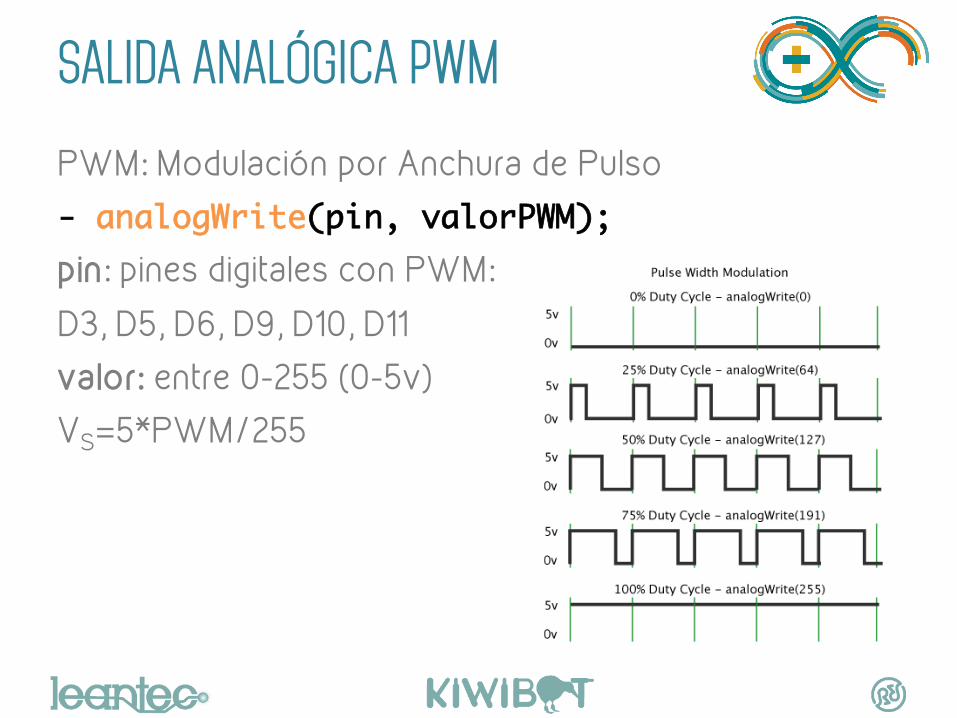
PWM: Modulación por Anchura de Pulso- analogWrite(pin, valorPWM);pin: pines digitales con PWM:
D3, D5, D6, D9, D10, D11
valor: entre 0-255 (0-5v)
VS=5*PWM/255
potenciómetro
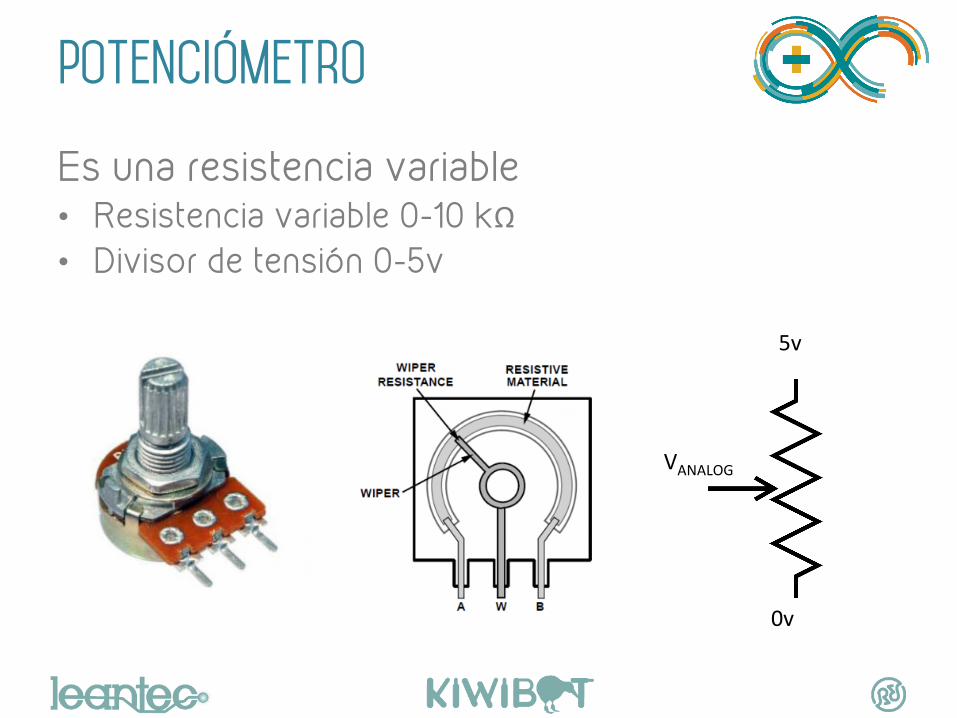
Es una resistencia variable • Resistencia variable 0-10 kΩ • Divisor de tensión 0-5v
5v
VANALOG
0v
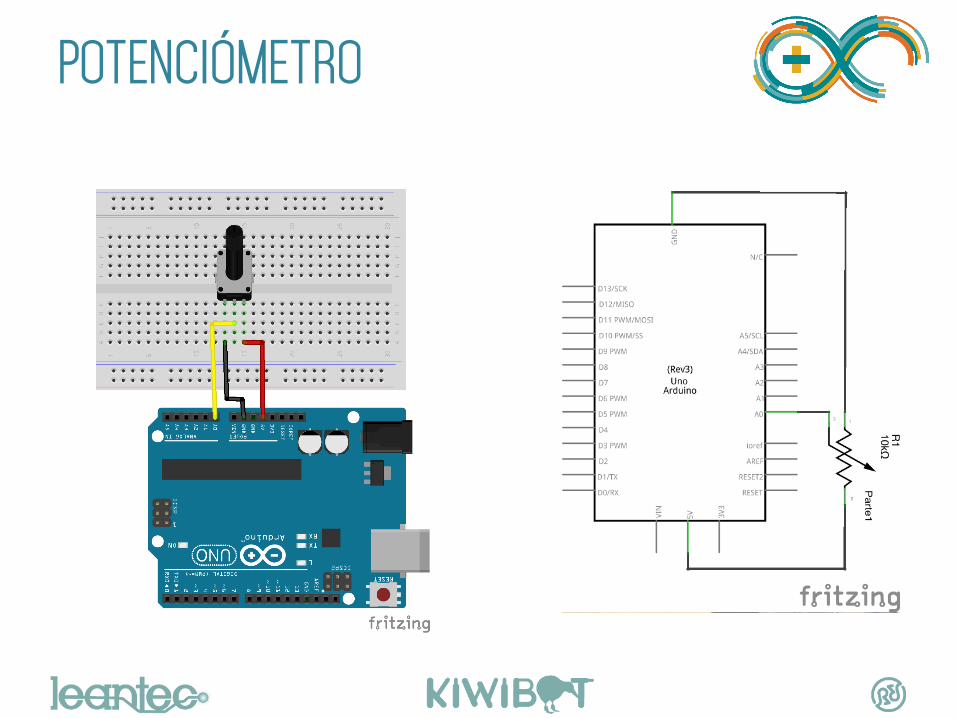
POTENCIÓMETRO
MAP Escala un valor de un rango a otro- map(value;fromLow;fromHigh;toLow;toHigh);value: valor a escalar El caso más típico es de una entrada analógica 0-1023 a una salida analógica 0-255sensorMapvalue=map(sensorValue;0; 1023;0;255);

PRÁCTICAS MOTORES SALIDAS ANAL.
• CONTROL VELOCIDAD MEDIANTE CÓDIGO
• AÑADIR UN POTENCIÓMETRO QUE REGULE
LA VELOCIDAD MOTOR
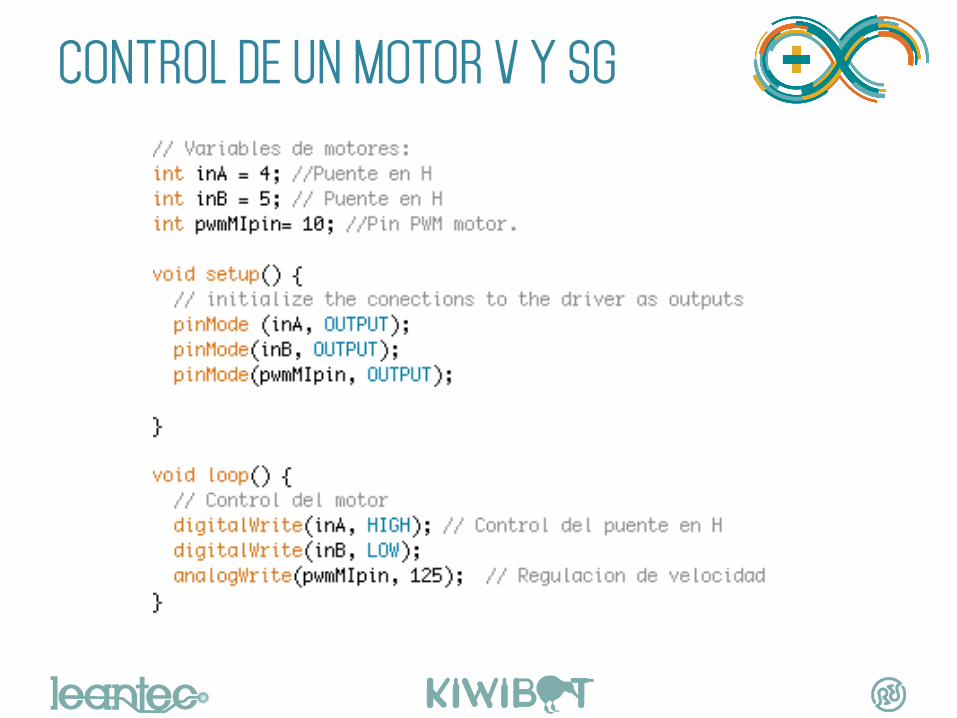
CONTROL DE UN MOTOR V Y SG
"

CONTROL velocidad motores POTENCIÓMETRO

• DISTANCIA INFRARROJOS
• DISTANCIA ULTRASONIDOS
• seguidor líneas
SENSORES

ESQUIVAOBJETOS

DISTANCIA INFRARROJOS
Producen una tensión en pin de salida en función de la distancia
Características: • Fáciles de usar
• Dependen de la luz ambiental
• No son lineales
• Rango reducido
• Son caros
"

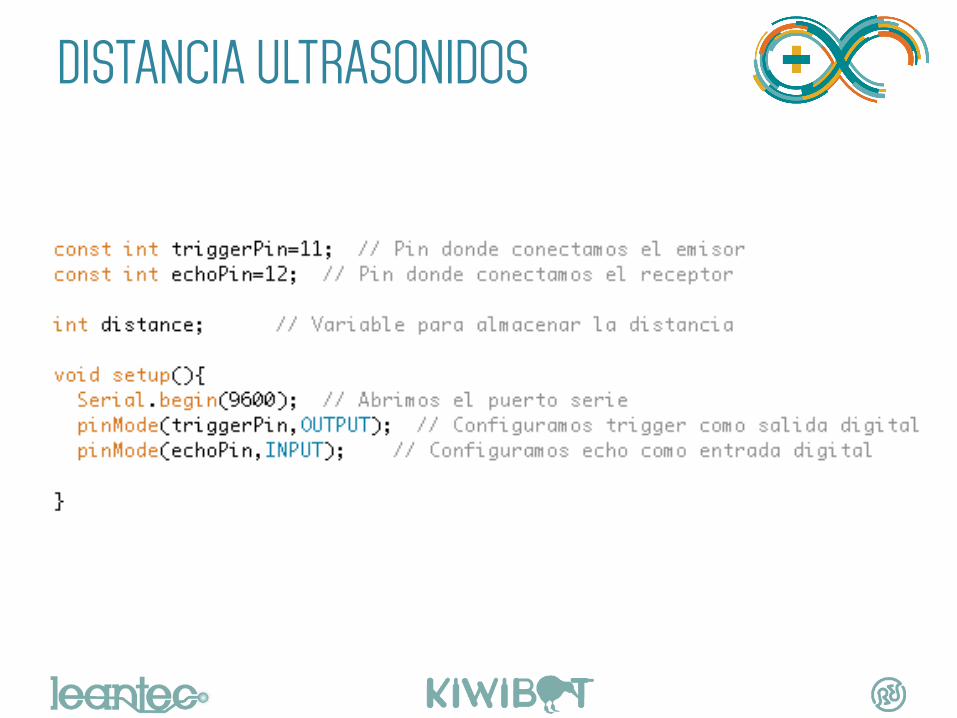
DISTANCIA ULTRASONIDOS
Manda un tren de pulsos de alta frecuencia y recibe el rebote permitiendo calcular el tiempo
Características: • Rango de distancias 2-400cm, precisión 3mm
• Ángulo 15º
"
Trigger: pin digital salidaEcho: pin digital entrada
DISTANCIA ULTRASONIDOS
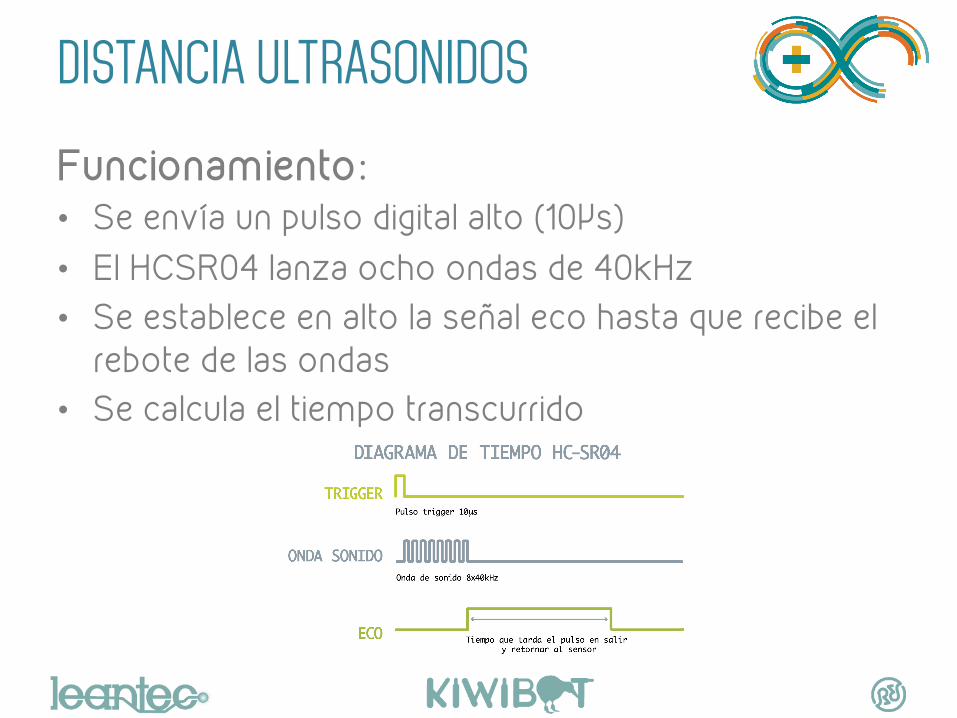
Funcionamiento: • Se envía un pulso digital alto (10µs) • El HCSR04 lanza ocho ondas de 40kHz • Se establece en alto la señal eco hasta que recibe el
rebote de las ondas • Se calcula el tiempo transcurrido
"

DISTANCIA ULTRASONIDOS
Cálculo del tiempo: t=μsv=e/t à e=2d=v*tà d=v*t/2d=34300(cm/s)*t(s)*10-6* /2=0,01715*t "
DISTANCIA ULTRASONIDOS
- pulseIn (pin, value)pin: el pin donde quieres leer el pulsovalue: HIGH or LOW
Lee un pulso en un pin. Si el valor es HIGH, espera a que el valor sea alto, y espera a que el pulso sea bajo Devuelve el tiempo en microsegundosSi supera el tiempo de espera devuelve 0
Tiempo de espera 1s por defecto- pulseIn (pin, value, timeout)timeout: tiempo de espera en microsegundos"
DISTANCIA ULTRASONIDOS

DISTANCIA ULTRASONIDOS
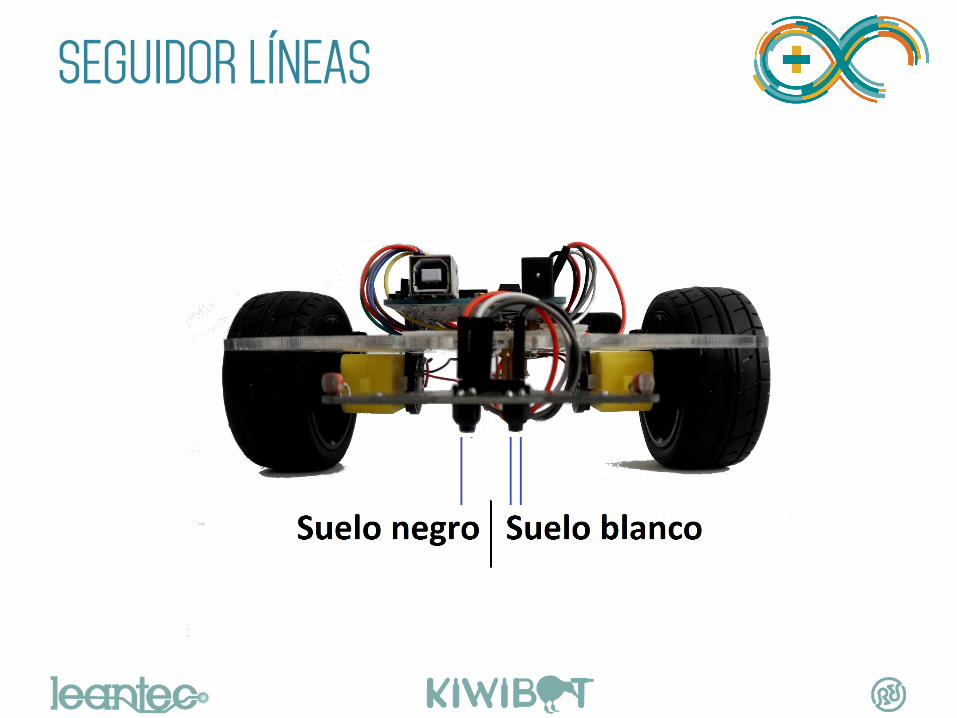
SEGUIDOR LÍNEAS
"
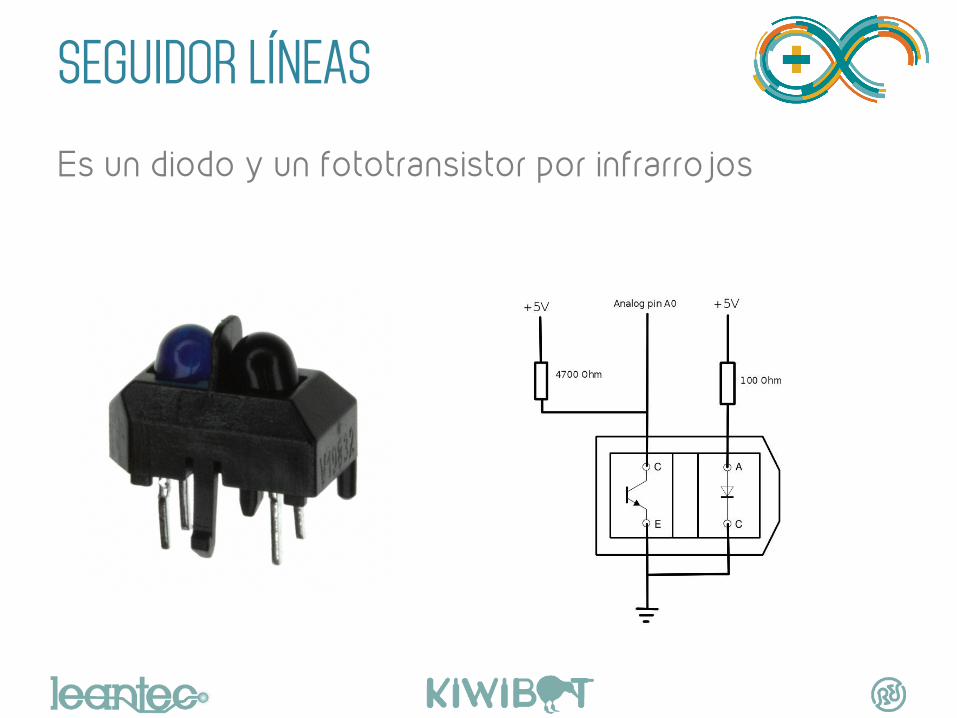
SEGUIDOR LÍNEAS
"
Es un diodo y un fototransistor por infrarrojos
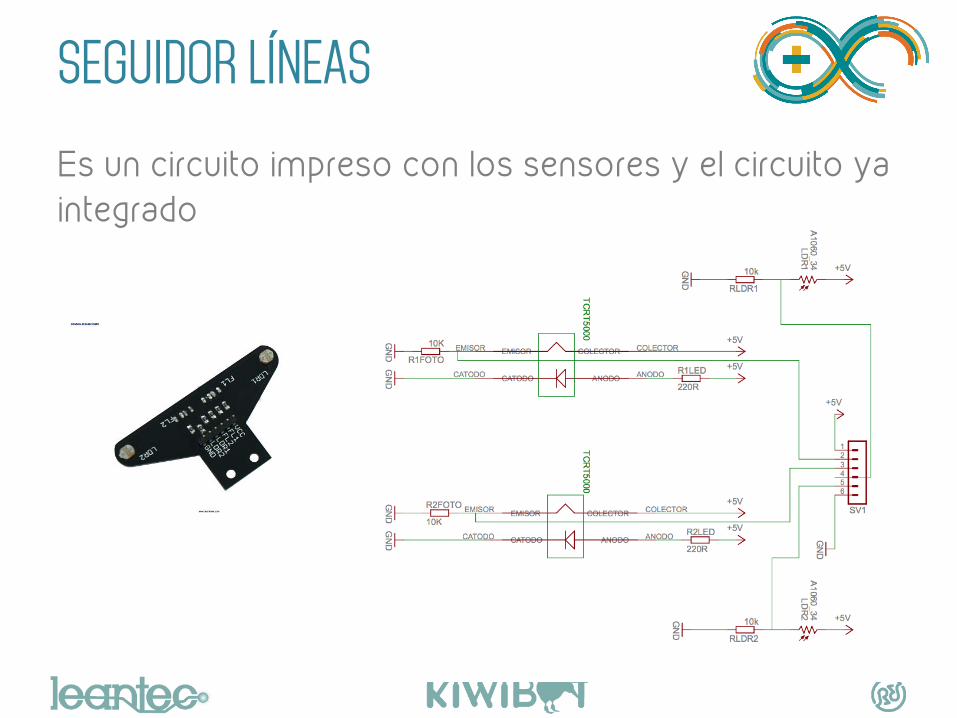
SEGUIDOR LÍNEAS
"
Es un circuito impreso con los sensores y el circuito ya integrado
Esta guía se distribuye bajo licencia Reconocimiento-‐ ComparCrIgual CreaCve commons 4.0
(cc) 2015 José Pujol Pérez Some rights reserved. This work licensed under CreaCve Commons ATribuCon-‐ShareAlike License. To view a copy of full license, see
hTp://creaCvecommons.org/licenses/by-‐sa/3.0/ or write to CreaCve Commons, 559 Nathan AbboT Way, Stanford, California 94305, USA.
Some of the figures have been taken from the Internet Source, and author and licence if known, is specified.
For those images, fair use applies.
licencia LICENCIA
Related Documents











