1 Lakmal Seneviratne Professor of Mechatronics Professor of Mechanical Eng. Kings College London Khalifa Univeristy, Abu Dhabi. Tactile Interactions During Robot Assisted Surgical Interventions

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Lakmal Seneviratne
Professor of Mechatronics Professor of Mechanical Eng.
Kings College London Khalifa Univeristy, Abu Dhabi.
Tactile Interactions During Robot Assisted
Surgical Interventions

2
Overview
1. Surgical Robotics – Soft Robots
2. Tactile Interactions - Learning
3. MRI Compatible Force Sensing
4. Haptic Interfaces
5. In Hand Manipulations

3
King’s College London

4
Khalifa University
• Established in 2009
• Vision - To be a leading international
center of higher education and research

5
1. Surgical Robotics – Soft Robots
6
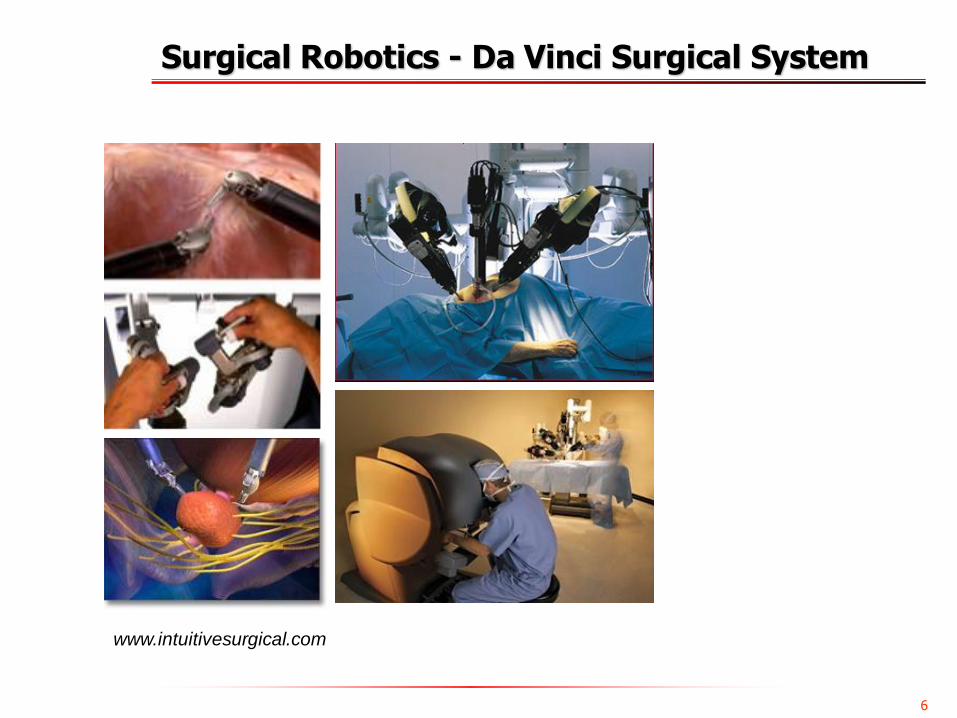
Surgical Robotics - Da Vinci Surgical System
www.intuitivesurgical.com

7
Surgical Robotics – Robotic Catheterisation
Hansen Medical: Robot-steered catheterization
tool for cardiac ablation procedures.
8
• Tools enter the body through narrow openings and manipulate soft organs that can move, deform, or change in stiffness.
• Teleoperated
• Restricted access (through Trocar ports),
minimal haptic feedback,
rigid robot tools,
confined space,
safety-critical, real-time, bio-compatible, sterilized tools, MRI compatible.
MIS

10
STIFF-FLOP - Inspiration

11
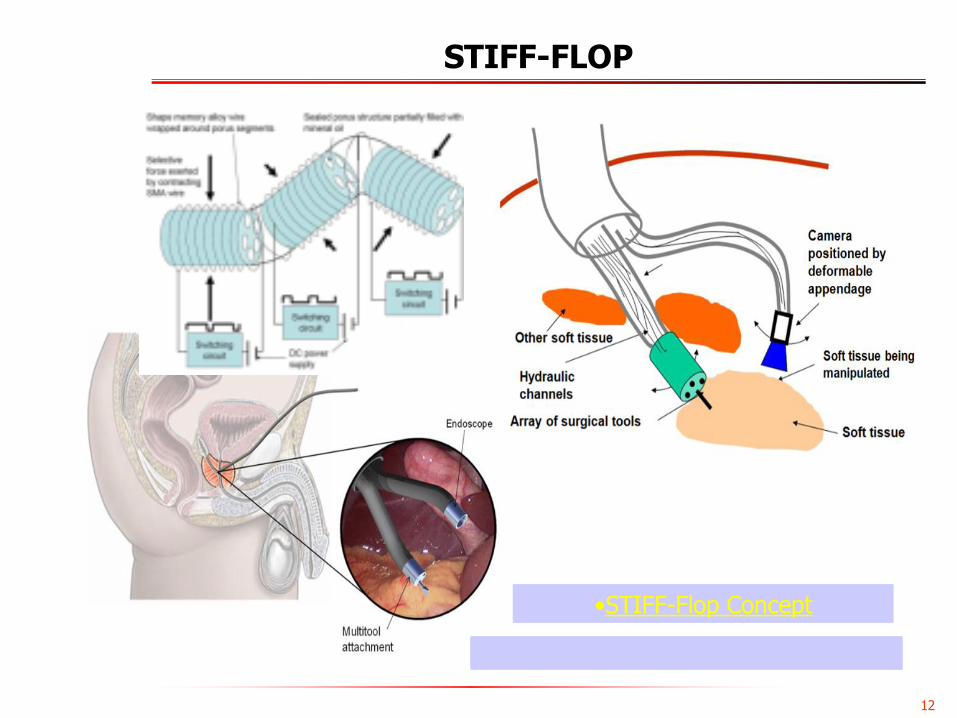
STIFF-FLOP
• Biological inspiration taken from octopus
• Soft, highly redundant manipulation device,
Embedded distributed sensing
cognitive development and intelligent control
Learning and cognitive reasoning - learn from physical interactions with environment,
12
STIFF-FLOP
•STIFF-Flop Concept

13
Octopus-like robot arm
•EU Project
•OCTOPUS

14
2. Tactile Interfaces and Learning

15
Tissue Palpation
Ex-Vivo Test Rig for Indentation
Ex-vivo indentation tests on bovine liver
- Measure Force Vs Displacement characteristics
16
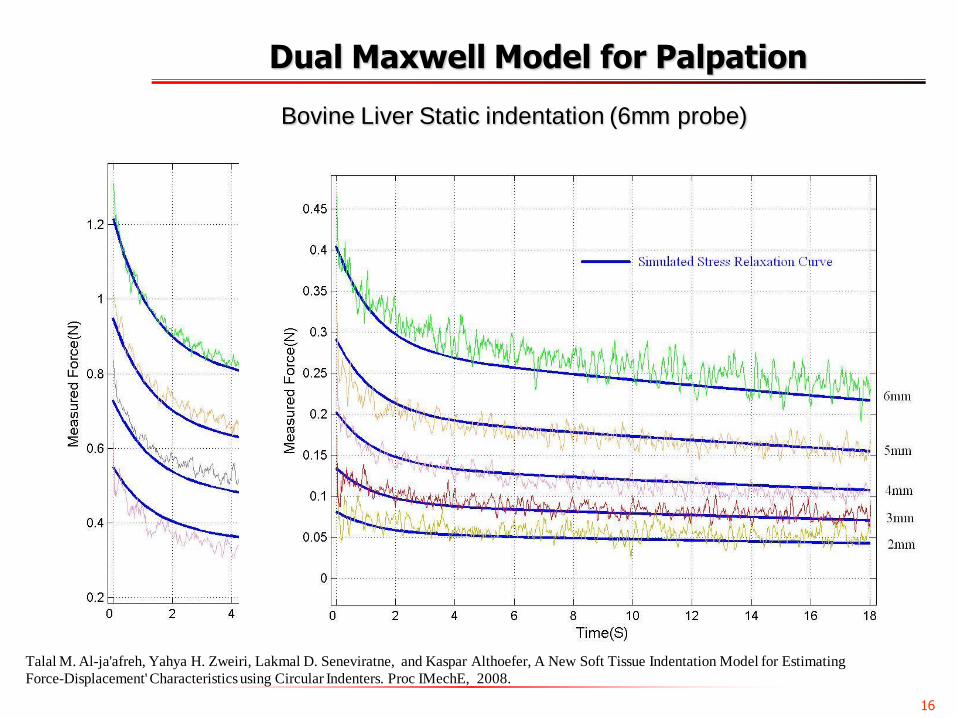
Bovine Liver Static indentation (6mm probe)
Dual Maxwell Model for Palpation
Talal M. Al-ja'afreh, Yahya H. Zweiri, Lakmal D. Seneviratne, and Kaspar Althoefer, A New Soft Tissue Indentation Model for Estimating
Force-Displacement' Characteristics using Circular Indenters. Proc IMechE, 2008.
17
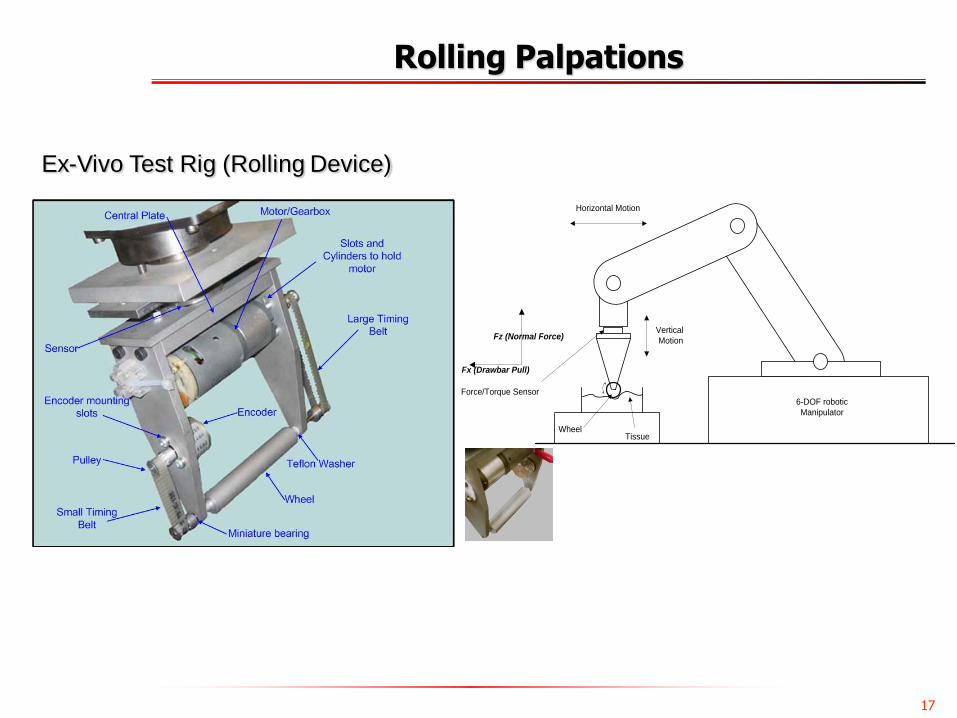
Rolling Palpations
Fz (Normal Force)
Fx (Drawbar Pull)
Force/Torque Sensor
Horizontal Motion
Vertical
Motion
6-DOF robotic
Manipulator
WheelTissue
Ex-Vivo Test Rig (Rolling Device)

18
Rolling Palpations – Soft Tissue
•Test results on pork kidney embedded with simulated tumor
•Kidney sample with an embedded nodule
Liu, H, Noonan, D. P., Challacombe, B. J., Dasgupta, P., Seneviratne, L. D., Althoefer*, K, Rolling Mechanical Imaging for Tissue Abnormality Localization During Minimally Invasive Surgery, IEEE Transactions on Biomedical Engineering, 2010.
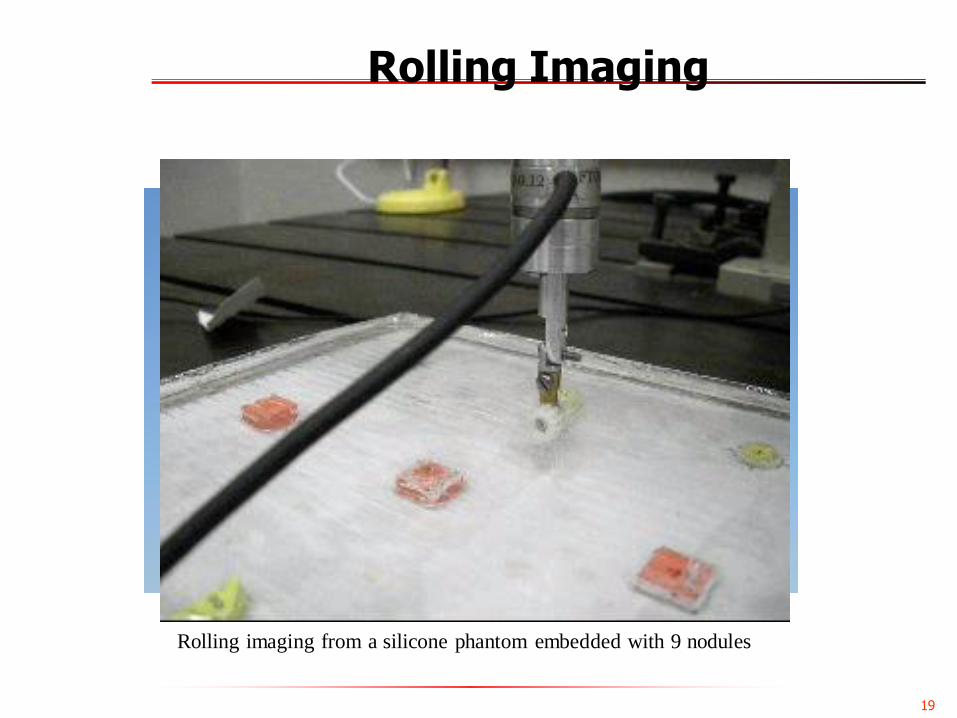
19
Rolling imaging from a silicone phantom embedded with 9 nodules
Rolling Imaging

20
Rolling Images

21
Rolling Indentation of Human Prostates
•2D
•3D
•Phantom Omni
•Rolling Probe
22
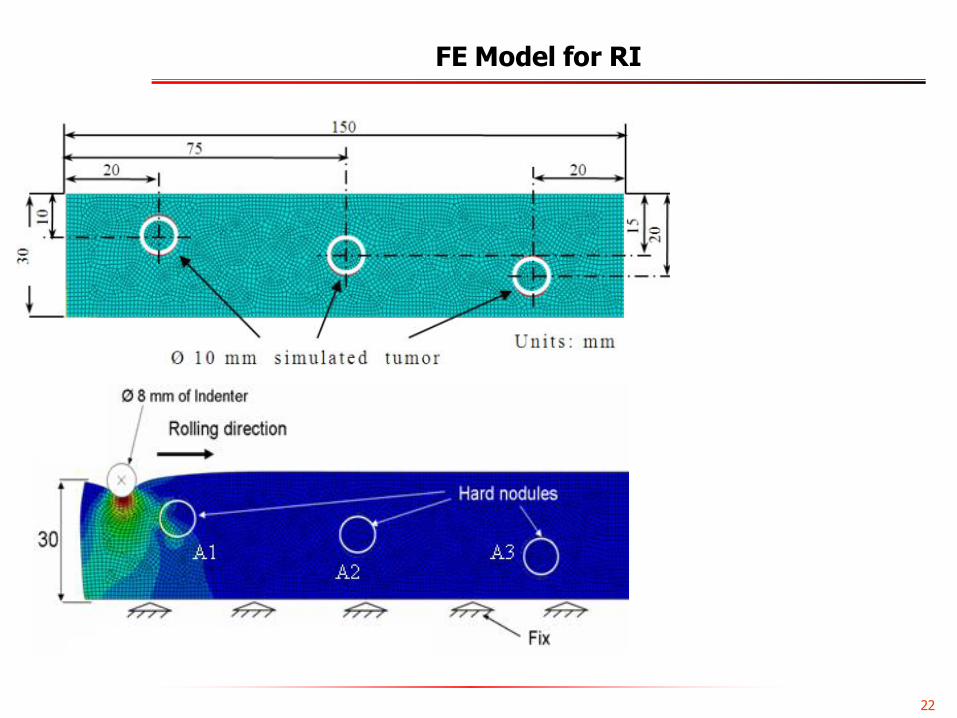
FE Model for RI

23
•23
K. Sangpradit, H. Liu, P. Dasgupta, K. Althoefer, and L. Seneviratne, “Finite Element Modelling of Rolling Indentation” IEEE
Transactions on Biomedical Engineering, 2011.
• 3 nodules, 10 mm diameter
- Arruda-Boyce model. FE model parameters from unixial tests.
• FE results are in good agreement with the corresponding experimental data, RMS range 0.02-0.15 %
Material μ ,shear Modulus (kPa)
λm, Locking stretch
Mass Density (kg/m3)
Type of
mesh
Rubber (N1) 73.40 1.01 1000 CPS4R
Silicone (RTV6166 gel)
4.98 1.05 980
CPS4R

24
3. Force Sensing for Surgical Applications

25
Fibre Optic Uni-Axial Force Sensor
P. Puangmali, H. Liu, K. Althoefer, and L. D. Seneviratne, “Optical Fibre Sensor for Soft Tissue Investigation during Minimally Invasive Surgery”, ICRA 2008.

26
Fibre Optic 3 Axis Force Sensor
3-Axis Force Sensor
P Puangmali, H Liu, L D Seneviratne, P Dasgupta, K Althoefer. Miniature 3-Axis Distal Force Sensor for Minimally Invasive Surgical
Palpation. IEEE/ASME Transactions on Mechatronics. 2011,

27
The miniaturized sensor (11 mm diameter) consists of a force sensor and four displacement sensors
Fibre optic technique is applied , MRI-compatible
Force sensor
Displacement sensor
Fibre Optic Stiffness Sensor
Panagiotis Polygerinos, Lakmal D. Seneviratne, and Kaspar Althoefer, Triaxial Catheter-Tip Force Sensor for MRI-Guided Cardiac Procedures,
IEEE/ASME Transactions on Mechatronics. 2012

28
Calibration results of fibre-optic
force sensor
Force Sensing
(a) (b)
(c)
Indentation Depth sensing (different Orientations)
Silicone
Mini FID θz
Fibre Optic Stiffness Sensor
Hongbin Liu, Jichun Li, Xiaojing Song, Lakmal Seneviratne, Kaspar Althoefer. "Rolling Indentation Probe for Tissue Abnormality
Identification during Minimally Invasive Surgery", IEEE Transactions Robotics. 2011.
.

29
Fibre Optic Force Sensing for Cardiac Catheters
Wei Yao, Tobias Schaeffter, L Seneviratne. K Althoefer,
MR-compatible Catheter for Cardiac Catheterization,
ASME Journal of Medical Devices, 2012

30
3-Axis Catheter Force Sensor
Fibre-optic catheter-tip force sensor.
12Fr catheter-tip integrated with tri-axial force sensor.
Panagiotis Polygerinos, Asghar Ataollahi, Tobias Schaeffter, Reza Razavi, Lakmal D. Seneviratne, and Kaspar Althoefer.
MRI-Compatible Intensity-Modulated Force Sensor for Cardiac Catheterization Procedures. IEEE Transactions on Biomedical
Engineering, 58 (3), pp. 721-726. 2011.
31
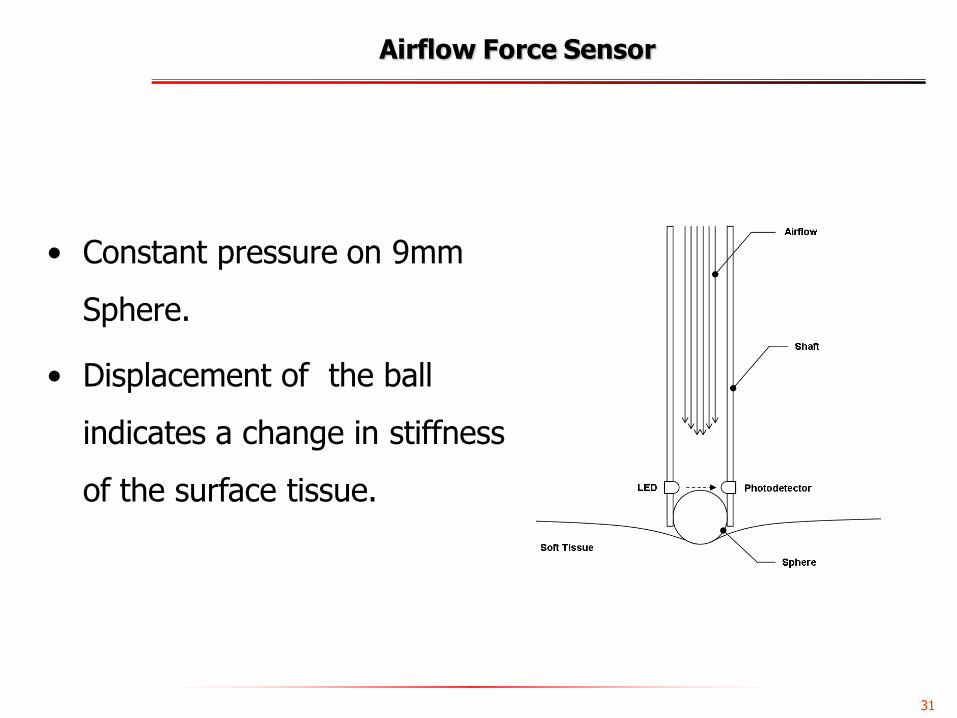
• Constant pressure on 9mm
Sphere.
• Displacement of the ball
indicates a change in stiffness
of the surface tissue.
Airflow Force Sensor
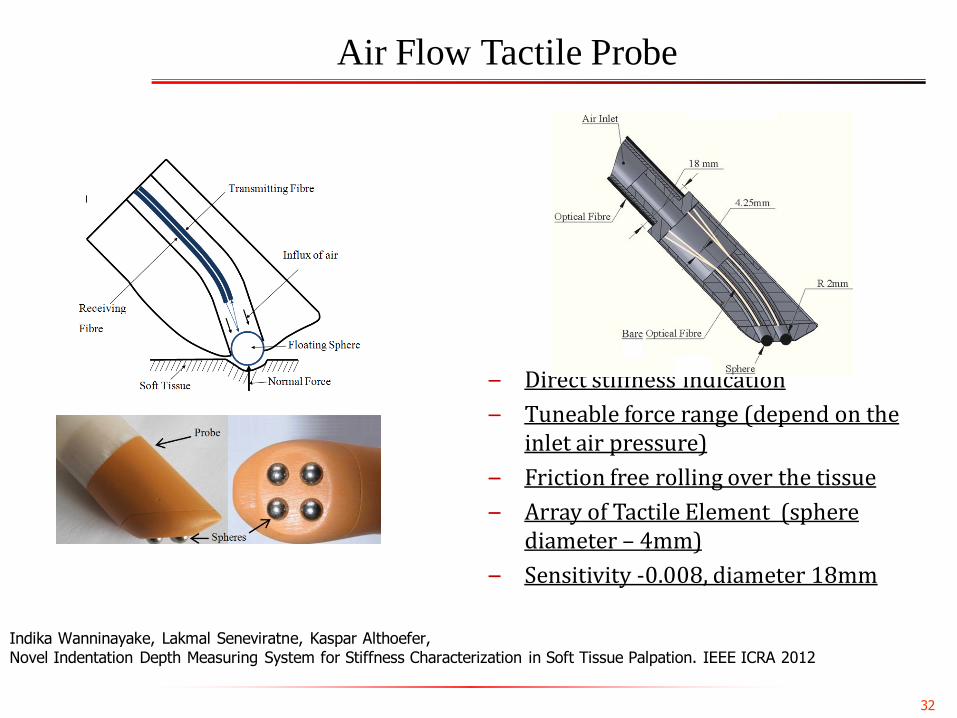
32
Indika Wanninayake, Lakmal Seneviratne, Kaspar Althoefer, Novel Indentation Depth Measuring System for Stiffness Characterization in Soft Tissue Palpation. IEEE ICRA 2012
– Direct stiffness indication
– Tuneable force range (depend on the inlet air pressure)
– Friction free rolling over the tissue
– Array of Tactile Element (sphere diameter – 4mm)
– Sensitivity -0.008, diameter 18mm
Air Flow Tactile Probe

33
•33
Air Flow Tactile Probe

34
The location of the 3 nodules on in the silicone phantom correspond to
peaks.
Airflow Force Sensor – Experimental Evaluation

35
Airflow Force Sensor
• Low friction sensor motion
• Simple design with potential for miniaturisation
• Can be built from MR-compatible materials
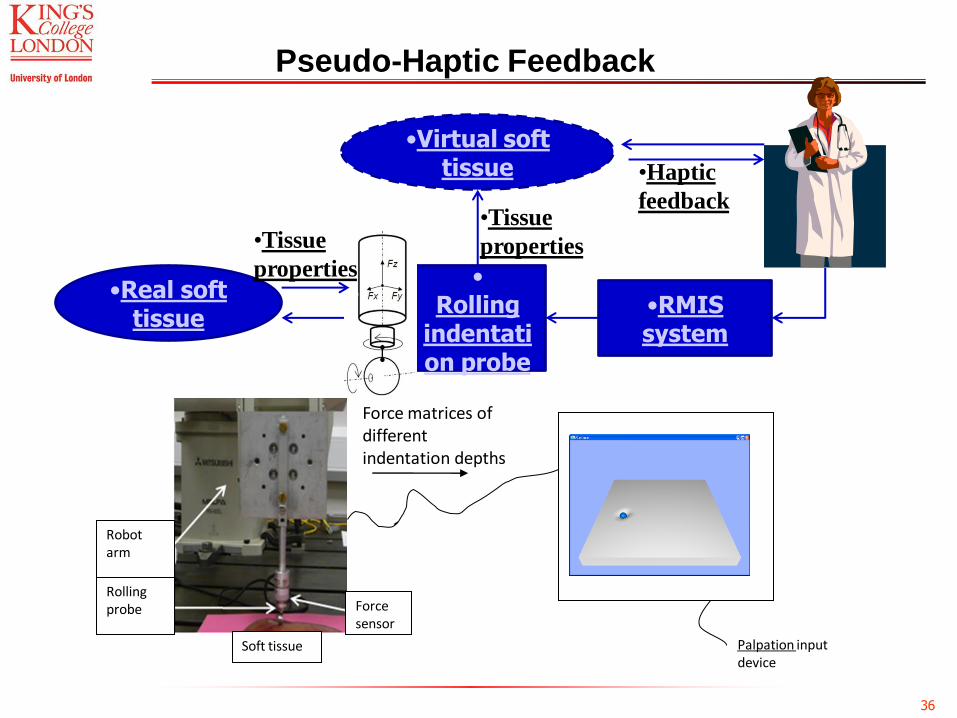
36
Pseudo-Haptic Feedback
Force matrices of different indentation depths
Palpation input device
Robot arm
Rolling probe Force
sensor
Soft tissue
•Real soft tissue
•Virtual soft tissue
•Tissue
properties
•Haptic
feedback
•RMIS system
• Rolling
indentation probe
•Tissue
properties

37
Palpation simulation system with touch pad as input device
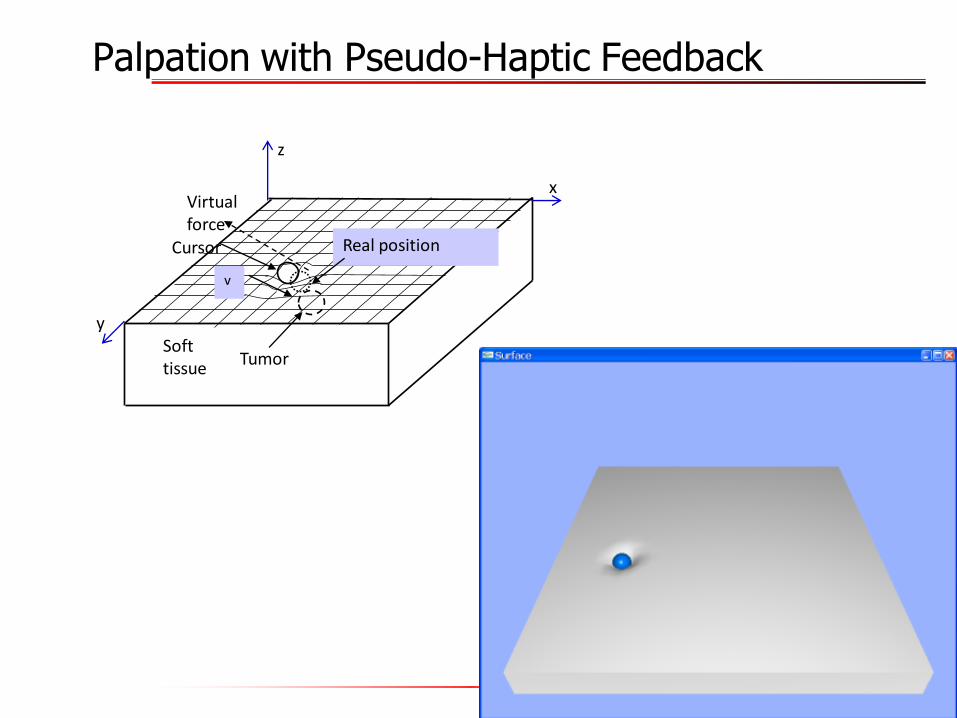
38
Palpation with Pseudo-Haptic Feedback
Cursor Real position
Tumor
Virtual force
v
Soft tissue
x
y
z

39
Pseudo-Haptic Feedback
• (a) cursor speed (b) cursor size
Min Li, Lakmal Seneviratne, Kaspar Althoefer. Tissue Stiffness Simulation and Abnormality
Localization using Pseudo-Haptic Feedback. IEEE ICRA 2012

40
HANDLE – EU FP7 IP UPMC (France), Shadow (UK), UC3M (Spain), FCTUC (Portugal), KCL (UK) ORU (Sweden), UHAM (Germany), CEA (France), IST (Portugal)
Project Objectives
• Characterization of object affordances • Learning and imitation of human strategies in handling tasks • Improving skills through 'babbling' • Autonomous in-hand dextrous manipulation

41
Learning Through Touch
Hongbin Liu, Lakmal Seneviratne, Kaspar Althoefer. Real-Time Local Contact Shape and
Pose Classification using a Tactile Array Sensor. IEEE ICRA 2012

42
Learning Through Touch
Right angle edge
λ1=121.9
λ2=22.5
λ3=7.5
flat surface
λ1=123.6
λ2=48.8
λ3=3.7
concave surface
(r = 45 mm)
λ1=123.6
λ2=53.3
λ3=7.5
sphere
(r = 6 mm)
λ1=28.7
λ2=18.1
λ3=15.6
vertex (corner)
λ1=30.1
λ2=8.45
λ3=6.23
cylinder
(r = 6 mm)
λ1=50.7
λ2=20.6
λ3=20.5
square
(a = 8 mm)
λ1=35.1
λ2=16.7
λ3=15.7
ring
(router= 10 mm,
rinner= 4 mm )
λ1=42.2
λ2=36.3
λ3=37.7
e1
e3
e3
e2
e1
e2
e3
e1
e2 e3
e1
e2 e3
e1
e1
e2 e3
e1
e2
e3
e2
e3
e1 e2
2

43
Challenges
Human-Robot system – Human in loop to deal with uncertainties. Monitoring, error recovery
Perception – Multi-modal (Tactile, Vision, etc)
Grasping and Manipulations
Tactile Interactions – Control, learn
Soft systems

44
Ribeiro
Related Documents











