ÉCOLE NATIONALE DES SCIENCES GÉOGRAPHIQUES Systèmes de référence et de coordonnées Fascicule 1 : L'ellipsoïde Serge Botton Novembre 2011

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ÉCOLE NATIONALE DES SCIENCES GÉOGRAPHIQUES
Systèmes de référence et de
coordonnées
Fascicule 1 : L'ellipsoïde
Serge Botton
Novembre 2011

Système de référence et de coordonnées : l'ellipsoï de 2010 2 ENSG / DPTS
P L A N - Définitions d'un ellipsoïde géodésique, d'un méridien origine - Géométrie de l'ellipsoïde de révolution aplati:
. Paramétrages . Coordonnées géographiques . Arc d'ellipse . Courbures et lignes géodésiques

Système de référence et de coordonnées : l'ellipsoï de 2010 3 ENSG / DPTS
DÉFINITION DE L ' ELLIPSOÏDE DE RÉVOLUTION APLATI ( 1 / 2 )
Dans le plan affine muni du repère 1 2R ( ; , )O= u u , considérons le cercle C de centre O et de rayon a,
U1
M
a
bm
O u1
2u
U2
( )R21,UUm
R21,
Ua
bUM
La transformée de C par l'affinité de rapport a
b selon u2 est une
ellipse E de centre O et de grand axe selon u1.
Rotation de E autour de (O,u1)
� Ellipsoïde de révolution allongé Rotation de E autour de (O,u2)
� Ellipsoïde de révolution aplati

Système de référence et de coordonnées : l'ellipsoï de 2010 4 ENSG / DPTS
DÉFINITION DE L ' ELLIPSOÏDE DE
RÉVOLUTION APLATI ( 2 / 2 )
Rotation de E autour de (O,u1)
� Ellipsoïde de révolution allongé
Rotation de E autour de (O,u2)
� Ellipsoïde de révolution aplati
L'ellipsoïde de révolution aplati est la forme mathématique simple qui modélise le mieux la surface terrestre.

Système de référence et de coordonnées : l'ellipsoï de 2010 5 ENSG / DPTS
PARAMÉTRAGE DE L ' ELLIPSOÏDE
Utilisation des coordonnées
sphériques (a,λ,u): Les coordonnées d'un point
m quelconque de la sphère sont:
λλ
ua
ua
ua
m
sin
cossin
coscos
O
p
P
M
m
HA
b
a
i j
ku
λ
L'ellipsoïde étant le transformée de la sphère par l'affinité de rapport
ab selon k, les coordonnées d'un point M quelconque de l'ellipsoïde
sont:
λλ
ub
ua
ua
M
sin
cossin
coscos

Système de référence et de coordonnées : l'ellipsoï de 2010 6 ENSG / DPTS
QUELQUES DÉFINITIONS
• u: latitude paramétrique
• λ: longitude O
i j
k u
λ
équateur
méridien
parallèle
PN
M
• Axe de rotation: axe des pôles
• Intersection de l'axe des pôles avec l'ellipsoïde: pôles Nord et Sud
• Plan ( )j,i;O : plan équatorial
• Intersection du plan équatorial avec l'ellipsoïde: équateur
• Intersection du plan contenant l'axe des pôles avec l'ellipsoïde: courbe méridienne
� courbe le long de laquelle λ est constant � 1ère courbe-coordonnées
• Intersection d'un plan parallèle à l'équateur avec l'ellipsoïde: cercle parallèle
� courbe le long de laquelle u est constant � 2ème courbe-coordonnées
Système de référence et de coordonnées : l'ellipsoï de 2010 7 ENSG / DPTS
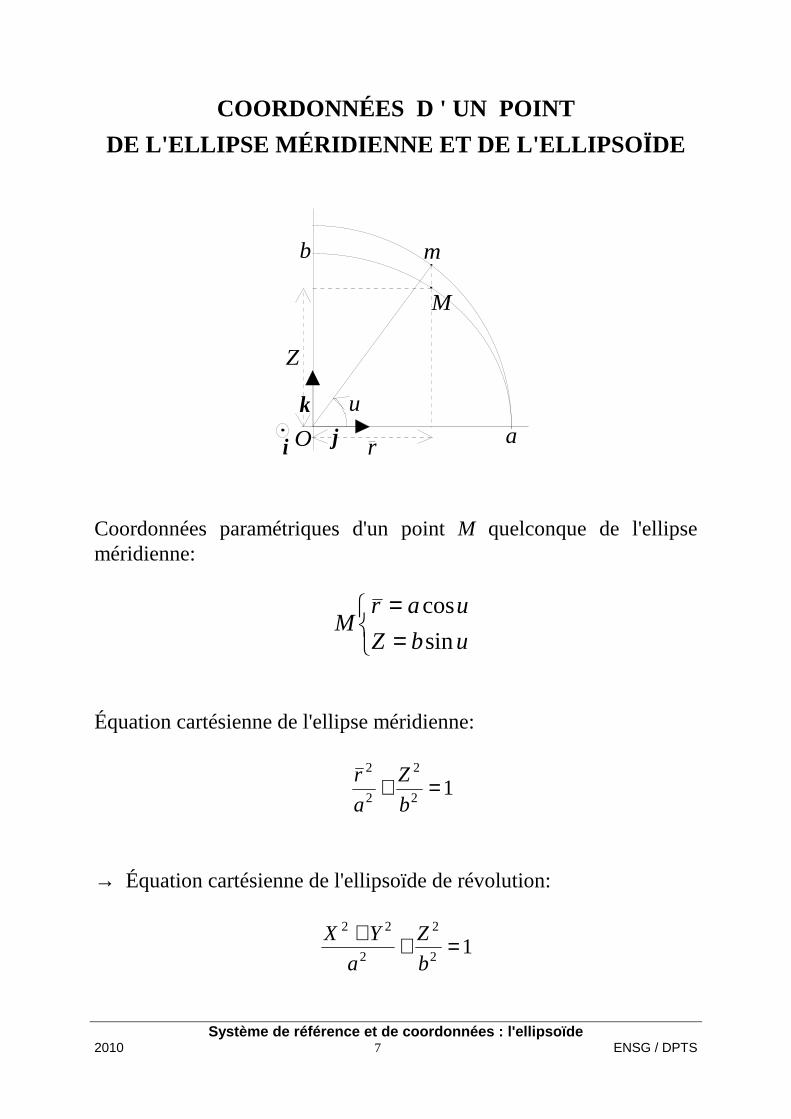
COORDONNÉES D ' UN POINT
DE L'ELLIPSE MÉRIDIENNE ET DE L'ELLIPSOÏDE
a
b
Z
r
m
M
Oi jk u
Coordonnées paramétriques d'un point M quelconque de l'ellipse méridienne:
==
ubZ
uarM
sin
cos
Équation cartésienne de l'ellipse méridienne:
12
2
2
2
=+b
Z
a
r
→ Équation cartésienne de l'ellipsoïde de révolution:
12
2
2
22
=++b
Z
a
YX

Système de référence et de coordonnées : l'ellipsoï de 2010 8 ENSG / DPTS
DÉTERMINATION DE L ' ELLIPSOÏDE (1/2)
Définition géométrique:
Définition à l'aide de deux paramètres géométriques:
• demi grand axe a et demi petit axe b
• a et aplatissement f (en anglais "flattening"):
a
baf
−=
• a et (première) excentricité e :
2
22
a
bae
−=
• a et deuxième excentricité e' :
2
22
'b
bae
−=

Système de référence et de coordonnées : l'ellipsoï de 2010 9 ENSG / DPTS
DÉTERMINATION DE L ' ELLIPSOÏDE (2/2)
Définition dynamique:
Un ellipsoïde de masse M crée un champ de gravité dont le potentiel U se développe en harmoniques sphériques sous la forme:
( )
θ
−= ∑∞+
=cosP1 22
1
2
nnn
n
Jr
a
r
GMU
où: • le terme r
GM correspond au cas d'une sphère homogène,
• les fonctions ( )θcosP2n sont les polynômes de Legendre de
degrés 2n,
• les coefficients J2n sont inconnus. Ils dépendent de la géophysique de la Terre. Ils s'expriment tous en fonction de J2.
On a: mffmfJ21
2
3
1
3
1
3
2 22 +−−=
avec GM
bam
22Tω= , ωT étant la vitesse de rotation de la Terre
� La donnée de a et J2 définit donc parfaitement l'ellipsoïde.

Système de référence et de coordonnées : l'ellipsoï de 2010 10 ENSG / DPTS
EXEMPLES D ' ELLIPSOÏDES
Désignation
Définition
Paramètres
géométriques dérivés
Ellipsoïde des poids et mesures (1799)
a = 6375739,0 m f = 1/334,29
b ≈ 6356666,521 m
Clarke 1866
a = 6378206,4 m b = 6356583,8 m
Clarke 1880 IGN
a = 6378249,2 m b = 6356515,0 m
Hayford 1909 (International 1924)
a = 6378388,0 m f = 1/297
b ≈ 6356911,946 m
GRS 1980
a = 6378137,0 m J2 = 108263.10-8
b ≈ 6356752,314 m
etc.
En moyenne: a ≈ 6380000 m f ≈ 1/300 e2 ≈ 1/150

Système de référence et de coordonnées : l'ellipsoï de 2010 11 ENSG / DPTS
CONNAISSANCE DES PARAMÈTRES D'UN ELLIPSOÏDE EXEMPLE 1 : CLARKE 1880
"Geodesy"; A.R.Clarke; 1880:
a = 20 926 202 pieds b = 20 854 895 pieds b
a =
292,465
293,465 , soit
1
293,465f =
Pour la conversion des pieds en mètres:
"Comparisons of the standards of length"; A.R.Clarke; 1866:
→ "Clarke 1880 anglais":
a = 6378249,14533 m f = 1/293,495 soit b ≈ 6356514,870 m
→ "Clarke 1880 IGN":
a = 6378249,20 m b = 6356515,02 m
Utilisation d'un autre facteur de conversion:
→ "Clarke 1880 Palestine":
a = 6378300,789 m b = 6356566,435 m
"Clarke 1866":
a = 6378206,4 m b = 6356583,8 m

Système de référence et de coordonnées : l'ellipsoï de 2010 12 ENSG / DPTS
CONNAISSANCE DES PARAMÈTRES D'UN ELLIPSOÏDE EXEMPLE 2 : ELLIPSOÏDE D ' EVEREST
"Lambert numerical tables, India Zone IV"; (1943):
a = 6 974 310,6 yards = 20 922 931,8 pieds 1 yd = 3 ft
1
300,8017f =
Conversion en mètres:
- utilisation du facteur de conversion du "pied indien":
1 Ind ft = 0,304 798 41 m
→ a ≈ 6 377 276,345 m → b ≈ 6 356 075,413 m
(ellipsoïde "Everest 1830" utilisé au Bengladesh)
- utilisation du "pied du Survey of India":
1 ft S.o.I. = 0,304 799 6 m
→ a ≈ 6 377 301,243 m → b ≈ 6 356 100,228 m
- utilisation du "British imperial yard" (Weights and Measures Act, 1872):
=⇔=
m 73799304,0ft Imp 1
m 203990,914=yd Imp 1yd Imp
36113370,39
m 1
→ a ≈ 6 377 304,033 m → b ≈ 6 356 103,009 m
Utilisation du "International yard" (1959) et du "Survey foot":
36001 Int yd m
3937= , et
12001 Surv ft m 0,304800610 m
3937= =

Système de référence et de coordonnées : l'ellipsoï de 2010 13 ENSG / DPTS
CONNAISSANCE DES PARAMÈTRES D'UN ELLIPSOÏDE EXEMPLE 3 : GRS80
A.G. de l'Association Internationale de Géodésie à Canberra en 1979:
Adoption de l'ellipsoïde "Geodetic Reference Surface 1980" (GRS80):
a = 6378137,0 m GM = 3986005 108 m3/s2 J2 = 108263 10-8 ωT = 7292115 10-11 rad/s
D'où: b ≈ 6356752,3141 m
Définition du "World Geodetic System 1984" (WGS84) par la Defense Mapping Agency (DMA, Etats-Unis):
Utilisation de GRS80, mais recalcul des paramètres géométriques:
b = 6356752,3142 m

Système de référence et de coordonnées : l'ellipsoï de 2010 14 ENSG / DPTS
VECTEURS TANGENTS À L'ELLIPSOÏDE
Soient pt vecteur tangent au cercle parallèle et mt vecteur tangent au méridien.
p
∂∂λ
= OMt
m u
∂∂
= OMt
O
M
ij
k
λ
u
tp
t m
λλ
ub
ua
ua
sin
cossin
coscos
OM donc
λλ−
0
coscos
cossin
p ua
ua
t et
λ−λ−
ub
ua
ua
cos
sinsin
sincos
mt

Système de référence et de coordonnées : l'ellipsoï de 2010 15 ENSG / DPTS
VECTEUR UNITAIRE NORMAL À L'ELLIPSOÏDE
Appelons n le vecteur unitaire normal à l'ellipsoïde. La latitude géographique ϕ est l'angle entre le plan équatorial et n.
On a uϕ >
( cf. page 18 )
O
M
n
ij
k
λ
ϕ
tp
t m
u

Système de référence et de coordonnées : l'ellipsoï de 2010 16 ENSG / DPTS
RELATION ENTRE LA LATITUDE PARAMÉTRIQUE u
ET LA LATITUDE GÉOGRAPHIQUE ϕϕϕϕ ( 1 / 3 )
O
M
n
ij
k
λ
ϕ
tp
t m
uλ
+=+=
ksinucosn
jsinicosu
ϕϕλλ
λ
λdonc les composantes de n sont
ϕϕλϕλ
sin
cossin
coscos

Système de référence et de coordonnées : l'ellipsoï de 2010 17 ENSG / DPTS
RELATION ENTRE LA LATITUDE PARAMÉTRIQUE u
ET LA LATITUDE GÉOGRAPHIQUE ϕϕϕϕ ( 2 / 3 )
La définition de n impose que n soit un vecteur unitaire orthogonal à pt et nt :
ainsi mp
mp
tt
ttn
∧∧
=
où
λλ
∧uua
uba
uba
cossin
cossin
coscos
2
2
2
mp tt
on aboutit à ubuaua 2222mp cossincos +=∧ tt
Siueubua
bw
222222 sin1
1
cossin ′+=
+= ,
alors w
uba cosmp =∧ tt
et
λλ
ub
wauw
uw
sin
cossin
coscos
n

Système de référence et de coordonnées : l'ellipsoï de 2010 18 ENSG / DPTS
RELATION ENTRE LA LATITUDE PARAMÉTRIQUE u
ET LA LATITUDE GÉOGRAPHIQUE ϕϕϕϕ ( 3 / 3 ) Transformation de u à ϕϕϕϕ:
uwcoscos =ϕ
uwb
asinsin =ϕ
uew
22 sin1
1
′+=
et ub
atantan =ϕ
Transformation de ϕϕϕϕ à u:
wu
ϕ= coscos
wa
bu
ϕ= sinsin
ϕ−= 22 sin1 ew
ϕ= tantana
bu
Relation différentielle entre u et ϕϕϕϕ:
La différentiation de la relation ub
atantan =ϕ donne:
ϕϕ= 22 cos
d
cos
d
a
b
u
u
2cos
1tan'=
ainsi 2d
d
aw
bu =ϕ

Système de référence et de coordonnées : l'ellipsoï de 2010 19 ENSG / DPTS
MÉRIDIEN ORIGINE Méridien origine: Plan méridien passant par un lieu L donné servant d'origine à la mesure des longitudes λ'. Soient λ la longitude de M par rapport à Greenwich, λ0 la longitude de L par rapport à Greenwich, En valeurs algébriques, λ = λ' + λ0
X
Y
Z
h
λ
ϕ
0M
M
λ 'λ0
L
Longitude origine de Paris par rapport à Greenwich: 2°20'14,025" Est

Système de référence et de coordonnées : l'ellipsoï de 2010 20 ENSG / DPTS
COORDONNÉES GÉOGRAPHIQUES
- longitude λ: angle entre le plan méridien de M et un plan méridien origine choisi arbitrairement, habituel-lement compté positivement vers l'Est.
- latitude géographique ϕ: angle entre le plan équatorial et la normale à
l'ellipsoïde.
- hauteur par rapport à l'ellipsoïde h: abscisse de M sur la normale à l'ellipsoïde, comptée
positivement à l'extérieur de l'ellipsoïde.
X
Y
Z
h
λ
ϕ
0M
M

Système de référence et de coordonnées : l'ellipsoï de 2010 21 ENSG / DPTS
COORDONNÉES CARTÉSIENNES EN FONCTION DE λλλλ ET DE ϕϕϕϕ
Coordonnées d'un point M quelconque de l'ellipse méridienne:
( )
ϕ−=ϕ==
ϕ==
sin1sin
sin
coscos
22
w
ea
aw
bubZ
w
auar
M
a
b
Z
r
m
M
M*h
Oi jk ϕu
Coordonnées d'un point M quelconque de l'ellipsoïde:
( )
ϕ−=ϕλ=ϕλ=
sin1
cossin
coscos
2eNZ
NY
NX
M , avec w
aN =
Point quelconque M* quelconque de l'espace:
( )[ ]
ϕ+−=ϕλ+=ϕλ+=
∗
sin1
cossin)(
coscos)(
2 heNZ
hNY
hNX
M

Système de référence et de coordonnées : l'ellipsoï de 2010 22 ENSG / DPTS
TRANSFORMATION ENTRE COORDONNÉES CARTÉSIENNES ET GÉOGRAPHIQUES
Passage de (λ,ϕ,h) à (X,Y,Z):
( )[ ]
ϕ+−=ϕλ+=ϕλ+=
sin1
cossin)(
coscos)(
2 heNZ
hNY
hNX
avec ϕ−
=22 sin1 e
aN
Passage de (X,Y,Z) à (λ,ϕ,h), formule itérrative :
X
Yarctan=λ
ϕ et h sont obtenues comme limites des suites convergentes ( ) N∈nnϕ et ( ) N∈nn
h définies par:
−ϕ+=
+=ϕ
00
22
0
220
cos
arctan
NYX
h
YX
Z
et
−ϕ+=
+−
×+
=ϕ
−−
−
ii
i
ii
ii
NYX
h
hN
NeYX
Z
cos
1
1arctan
2211
1222
Dans les deux sens, les formules fournissent des résultats exacts
au niveau millimétrique.

Système de référence et de coordonnées : l'ellipsoï de 2010 23 ENSG / DPTS
TRANSFORMATION ENTRE COORDONNÉES CARTÉSIENNES ET GÉOGRAPHIQUES
Passage de (X,Y,Z) à (λ,ϕ,h), formule directe :
21 1f e= − − 2 2 2R X Y Z= + + Y
arctgX
λ =
( )2
2 21
Z e aarctg f
RX Yµ
= ⋅ − +
+
( )( )
2 3
2 2 2 3
1 sin
1 cos
Z f e aarctg
f X Y e a
µϕ
µ
− + =
− + −
[ ]2 2 2 2cos sin 1 sinh X Y Z a eϕ ϕ ϕ = + ⋅ + − −
Les deux processus fournissent un résultat numérique identique.

Système de référence et de coordonnées : l'ellipsoï de 2010 24 ENSG / DPTS
LONGUEUR D ' UN ARC D ' ELLIPSE Arc de méridien infiniment petit:
( ) ϕ−=ϕρ=β d1
dd 3
2
w
ea
avec ϕ−= 22 sin1 ew
M
O
k ϕ
ϕd
uλ
... et donc la longueur d'un arc de méridien entre l'équateur et un point
quelconque M de latitude ϕ est égale à ( )
∫∫ϕϕ
ϕ−=β=β0
3
2
0d
1d
w
ea .
Pratiquement, β peut s'écrire comme un développement en série
des fonctions ( ) N∈nnϕsin .
Une étude de convergence montre que, pour atteindre le mm d'exactitude, il est nécessaire d'utiliser le terme sin8ϕ :
( )ϕ+ϕ+ϕ+ϕ+ϕ=β 8sin6sin4sin2sin 43210 bbbbba
with 86420 16384
175
256
5
64
3
4
11 eeeeb −−−−=
86421 4096
105
1024
45
32
3
8
3eeeeb −−−−=
8642 16384
525
1024
45
256
15eeeb ++=
863 12288
175
3072
35eeb −−=
84 131072
315eb =

Système de référence et de coordonnées : l'ellipsoï de 2010 25 ENSG / DPTS
COURBURES D 'UNE SURFACE Soient une surface Σ et M un de ses points,
γ une courbe quelconque de Σ passant par M dans la direction de T,
Sn la section normale à Σ en M dans la direction de T,
Rn
nSM
γΣ
nT
Sn est l'intersection de Σ avec le plan normal ( )n,T;M .
Rayon de courbure normale:
Parmi toutes les courbes γ dans la direction de T, Sn est celle qui admet le plus grand rayon de courbure en M; son rayon de courbure est le rayon de courbure normale Rn .
Rayon de courbure principal:
On démontre qu'il existe 2 directions particulières 1T et 2T selon lesquelles Rn est extremum.
1T et 2T sont les directions principales de Σ en M.
( )11 TnRR = et ( )22 TnRR = sont les rayons de courbures principaux .
MΣ
n
Dans une direction T quelconque: ( )2n1 T RRR ≤≤
Sur un ellipsoïde de révolution aplati:
• 1T est la direction du méridien,
• 2T est la direction du parallèle.

Système de référence et de coordonnées : l'ellipsoï de 2010 26 ENSG / DPTS
RAYONS DE COURBURE PRINCIPAUX
DE L ' ELLIPSOÏDE Rayons de courbure pricipaux:
• dans la direction du méridien:
( )3
2
(mér)1
d
d
w
eaR
−=ρ=ϕβ=n
• dans la direction du parallèle:
w
aNR ==(paral)n avec
( ) 21
22 sin1−
ϕ−= ew
N est appelé grande normale.
O
M
ij
k
Tm
AzpT
T
Sphère de courbure totale: ρ= NRT
Sphère de courbure moyenne:
ρ+= 11
2
11
M NR
Courbure d'une section normale d'azimut Az: (formule d'Euler):
L'azimut Az est l'angle entre le Nord et une direction considérée,
N
AzAz
R
22 sincos1 +ρ
=
méridien
parallèle
direction
Az

Système de référence et de coordonnées : l'ellipsoï de 2010 27 ENSG / DPTS
COORDONNÉES SYMÉTRIQUES D ' UNE SURFACE
Soit ds une longueur élémen-
taire sur la surface Σ munie du paramétrage ( )vu, .
ΣM
ds
OMv
∂∂
uOM∂∂
L'expression de ds peut se mettre sous la forme:
222 ddd2dd vGvuFuEs ++= avec
∂∂=
∂∂⋅
∂∂=
∂∂=
2
2
vG
vuF
uE
OM
OMOM
OM
- Si 0=F , le paramétrage ( )vu, est dit orthogonal. Les courbes-coordonnées (courbes à u ou à v constant) se coupent alors angles droits.
- Si
==
0F
GE , le paramétrage est dit symétrique. Dans ce cas,
l'élément de longueur ds peut s'écrire:
( )222 ddd vuEs +=

Système de référence et de coordonnées : l'ellipsoï de 2010 28 ENSG / DPTS
COORDONNÉES SYMÉTRIQUES DE L'ELLIPSOÏDE
22222222 ddddd λ+ϕρ=λ+β= rrs
→ les coordonnées géographiques sont orthogonales non symétriques
mér.
paral.m
dβ
r dλ
Une fonction ( )ϕL telle que ( )L,λ soit un paramétrage
symétrique peut être définie comme suit :
2222 dd Lr=ϕρ avec ( )
−=ρ
ϕ=ϕ=
3
21
coscos
w
eaw
aNr
donc ( ) ϕϕϕ−
−=ϕϕ
−= dcossin1
1d
cos
1d 22
2
2
2
Le
e
w
e
L s'intégre en: ϕ−ϕ+−
ϕ+π=sin1
sin1ln
224tanlnL
e
ee
L est la latitude isométrique

Système de référence et de coordonnées : l'ellipsoï de 2010 29 ENSG / DPTS
LIGNES GÉODÉSIQUES DE L ' ELLIPSOÏDE Définition:
Soit une surface Σ quelconque, une ligne géodésique GΓ est une courbe telle que, en tout point, son vecteur unitaire de normale principale N soit égal au vecteur normal à Σ n.
Σ
ΓG
A
B
N = n
Propriété géométrique fondamentale:
Parmi toutes les courbes γ tracées sur Σ entre A et B, la ligne géodésique est le chemin le plus court.
En navigation, la ligne géodésique entre 2 points est appelée l'orthodromie.
Relations caractéristiques:
- relation de Clairaut:
r désignant le rayon du parallèle,
sinr Az est constant sur une géodésique - relation de Laplace: λϕ= dsind Az

Système de référence et de coordonnées : l'ellipsoï de 2010 30 ENSG / DPTS
PROBLÉMATIQUE DU CALCUL DES LIGNES
GÉODÉSIQUES SUR L ' ELLIPSOÏDE
O
ij
k
Az2
1M
M2
1Az
Problème direct:
Connaissant ( )111 ,ϕλM 1Az et s∆ , calcul de ( )222 ,ϕλM et 2Az . Problème inverse:
Connaissant ( )111 ,ϕλM et ( )222 ,ϕλM , calcul de 1Az , s∆ et 2Az . Méthodes:
• méthode générale (calcul des grandes géodésiques),
• méthode approximatives (géodésiques courtes),
• utilisation d'une surface intermédiaire (plan conforme).

Système de référence et de coordonnées : l'ellipsoï de 2010 31 ENSG / DPTS
CALCUL APPROCHÉ DES LIGNES GÉODÉSIQUES
Principe: Modéliser la ligne géodésique entre M1 et M2 par son cercle osculateur
1GC en M1.
� Problème de trigonométrie plane.
Applicabilité: Exact jusqu'à quelques dizaines de km au niveau millimétrique.
1M
M2αs
ϕ1
λ1
M1
M2
RG1α
s
(dans le plan osculateur en M1)
n
Az1
t G1
t G1
n
1GR est fourni par la formule d'Euler:
1
12
1
12
G
cossin1
1ρ
+= Az
N
Az
R
On a 1GR
s=α et
+=−α+α=
ϕλ ttt
ntMM
11G
GGG21
cossin
)1(cossin
1
111
AzAz
RR ,
d'où, si ( )222 LLL ,, ZYX représente les coordonnées de M2 dans le
repère local en M1 ( )ntt ,,;1L1
R ϕλ= M :
−ααα
=
1
1
1
2
2
2
G
G1
G1
L
L
L
)1(cos
cossin
sinsin
R
RAz
RAz
Z
Y
X

Système de référence et de coordonnées : l'ellipsoï de 2010 32 ENSG / DPTS
CALCUL APPROCHÉ DES LIGNES GÉODÉSIQUES (suite 1)
Passage entre le repère local 1
LR et le repère géocentrique TR :
( )
λ
ϕ−π
π=
+++
ϕ
λ
k
j
i
Rn
t
t
���� ����� ��
13123 R2
R2
R avec
ππ−
ππ
=
π+
100
02
cos2
sin
02
sin2
cos
2R3
ϕ−π
ϕ−π
ϕ−π−
ϕ−π
=
ϕ−π+
11
11
12
2cos0
2sin
0102
sin02
cos
2R
et ( )
λλ−λλ
=λ+
100
0cossin
0sincos
R 11
11
13
On en déduit:
ϕ−−ϕλ−ϕλ−
ϕλϕλϕϕλϕ−λϕ−
λλ−=
12
12
1112
1112
11111
11111
11
L
L
L
sin)1(
cossin
coscos
sinsincoscoscos
cossinsincossin
0cossin
2
2
2
eNz
Ny
Nx
Z
Y
X
et
ϕϕλϕλϕ−λλϕλϕ−λ−
+
ϕ−ϕλϕλ
=
2
2
2
L
L
L
11
11111
11111
12
1
111
111
2
2
2
sincos0
sincossinsincos
coscoscossinsin
sin)1(
cossin
coscos
Z
Y
X
eN
N
N
z
y
x
où (x2,y2,z2) sont les coordonnées de M2 dans TR .

Système de référence et de coordonnées : l'ellipsoï de 2010 33 ENSG / DPTS
CALCUL APPROCHÉ DES LIGNES GÉODÉSIQUES (suite 2: formulaire)
Problème direct: ( ) ( )2221 ,,, ϕλ→AzsAz
−ααα
=
1
1
1
2
2
2
G
G1
G1
L
L
L
)1(cos
cossin
sinsin
R
RAz
RAz
Z
Y
X
avec
ρ+=
=α
1
12
1
12
G
cossin1
1
1
Az
N
Az
R
R
s
G ,
+
ϕ−ϕλϕλ
=
−
2
2
2
L
L
L1
12
1
111
111
2
2
2
sin)1(
cossin
coscos
Z
Y
X
eN
N
N
z
y
x
R ,
puis (x2,y2,z2) fournit (λ2,ϕ2) par itération (cf. page 22).
Problème inverse: ( ) ( )2122 ,,, AzsAz→ϕλ (λ2,ϕ2) fournit (x2,y2,z2),
ϕ−−ϕλ−ϕλ−
=
12
12
1112
1112
L
L
L
sin)1(
cossin
coscos
2
2
2
eNz
Ny
Nx
Z
Y
X
R ,
ϕϕ=
α=
+=α
ρ+=
=
.
sincos
cossin
sin
cossin1
tan
puis
122
112
G
2G
2L
2L2
1
12
1
12
G
L
L1
1
1
22
1
2
2
AzN
NAz
RsR
YX
Az
N
Az
R
Y
XAz

Système de référence et de coordonnées : l'ellipsoï de 2010 34 ENSG / DPTS
BIBLIOGRAPHIE - J.-J. Levallois; "Géodésie générale"; tome 2 ("Géodésie classique bidimensionnelle"); éd. Eyrolles; 1970.
- H. Duquenne; "Cours de géodésie bidimensionnelle"; publication IGN; 1987.
J.-Ph. Dufour; "Cours d'introduction à la géodésie"; éd ENSG; Marne la Vallée; 1999.
- "Geodetic glossary"; édité par le National Geodetic Survey, Rockville (États-Unis); 1986.
Related Documents











