1 Summary Report for the Forum on Integrated Sensors for Cybersystems Forum Dates: March 22 & 23, 2012 Forum Location: Carton House, Maynooth, Co. Kildare, Ireland Sponsors: Semiconductor Research Corporation, Science Foundation Ireland, National Science Foundation Report Authors: Victor Zhirnov Alba Avila Dale Edwards David Yeh William Joyner Betsy Weitzman Steve Hillenius Ralph K. Cavin, III

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
SummaryReportfortheForumonIntegratedSensorsforCybersystems
ForumDates: March22&23,2012
ForumLocation: CartonHouse,Maynooth,Co.Kildare,Ireland
Sponsors: SemiconductorResearchCorporation, ScienceFoundationIreland,
NationalScienceFoundation
ReportAuthors:Victor Zhirnov
Alba Avila
Dale Edwards
David Yeh
William Joyner
Betsy Weitzman
Steve Hillenius
Ralph K. Cavin, III

2
I. Introduction
Sensors and connected systems of sensors have the primary function of providing increased human
awareness of the states of the environment, of human health and safety, and of the systems designed to
serve humankind. In all cases, it is important that sensors and systems of sensors provide accurate,
timely, and trusted data for information extraction to support decision processes. In some cases, it is
possible to construct autonomic systems that act without human intervention in a corrective manner to
undesired deviations in the sensed data.
Sensors and sensor systems are proliferating throughout society, often along the lines of niche
applications. Because of their fundamental importance, it is very important that the costs of producing
and installing sensors and their networks be continuously reduced. One inspiration for cost reduction is
in the domain of information processing where the cost‐per‐instruction/second has decreased
exponentially for about thirty years. This remarkable progress has been enabled by the continued
progress in integrated circuit technology to provide rapidly increasing complexity for design coupled
with large scale manufacturing of a single processor design to enable many information processing
applications. Can there be a programmable parallel for sensor technology, given the broad array of
physical domains across which sensors must operate?
Looking beyond individual sensors, systems of interconnected sensors are contributing to the
proliferation of vast quantities of data from which information must be extracted for use in decision‐
making; often with real‐time requirements. The payoff for the successful implementation of these ‘big‐
data’ information systems is believed to be huge in terms of resource conservation, safety and security
of members of society, and the enablement of collective collaboration. The phrase ‘smart cities’ is often
used as a descriptor for the benefits of integrated sensor systems that can promise major benefits to
society.
These topics were explored by leading researchers from industry, academia, and governments at the
NSF/SFI/SRC Forum on Integrated Sensors for Cybersystems (FISC) that was held in Maynooth Ireland on
March 22 and 23, 2012. (http://www.src.org/calendar/e004576/) Professor Martin Curley, Director of
Intel Labs, Europe gave the keynote address for the Forum [1] in which he considered three emerging
mega‐trends; Mass Collaboration, Digital Transformations, and Sustainability. With respect to Digital
Transformations, the impact of Moore’s Law on information processing is so significant that computing
is becoming pervasive in society as indicated by a projected 15 billion connected devices by 2015. There
is also emerging embedded ambient intelligence capability that is context‐aware, personalized,
adaptive, and that anticipates services required by its user. Professor Curley indicated that while there is
an emphasis on highly energy‐efficient information processing technologies, the real gains toward
sustainability are likely to be derived from applications of information technology to managing and
reducing resource utilization. He noted that there appears to be a trend in information processing from
a focus on automation of systems, to substitution (i.e. electronic as opposed to physical meetings) to de‐
materialization (i.e. electronic financial transactions).

3
Although not a primary emphasis of the Forum, it is generally acknowledged that cyber security is an
essential dimension of cyber‐physical systems. In [2], Professor Fred Schneider of Cornell University
offers an interesting perspective on a potential doctrine for cyber security based on analogies with the
systems developed by society for public health. In general, public health doctrine centers on the ideas
of public education, the creation and use of methods for prevention and treatment of specific diseases,
and identification and management of disease and infected individuals through surveillance,
information gathering, and analysis. These ideas may provide a framework from which to manage the
problems arising in cyber security.
It has been projected that the structure of systems needed to support the overarching concept of smart
cities can be described at several levels beginning with the sensor/actuator layer, the component layer,
the system architecture layer, the smart mobility layer, and ultimately, the smart cities layer. FISC was
organized into sessions reflecting this taxonomy to identify some of the basic research needs across
these layers. In the following, a brief description of each session follows.
References
1. Martin Curley, Plenary: “The World is Flat; Towards the Next Evolutionary Leap!”, SRC/SFI/NSF Forum on
Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐
23, 2012
2. Diedre K. Mulligan and Fred B. Schneider, “Doctrine for Cybersecurity,”
http://www.cs.cornell.edu/fbs/publications/publicCybersecDaed.pdf
II. EmergingPhysics&TechnologyOpportunitiesforIntegratedSensor(SessionOne)
Contributors:
Dermot Diamond / Dublin City University – Ireland Robert Dutton / Stanford University – USA Michael Goryll / Arizona State University ‐ USA Martin Hegner / Trinity College Dublin ‐ Ireland Richard Brown / University of Utah – USA Arjang Hassibi / University of Texas at Austin – USA
Transducers that convert a physical stimulus into a distinguishable electrical signal can be based on
different physical mechanisms, such as thermal, magnetic, electrical, chemical or mechanical effects.
Examples of magnetic transducers are magnetic tunnel junctions (MTJ) and giant magnetoresistance
(GMR) spin valves. Electrical transducers are represented by a family of charge‐sensitive structures,
including FET‐type devices and various nanowire based structures. Mechanical transducers in the form
of surface acoustic wave (SAW) devices and nanoelectromechanical structures (NEMS) offer an
amazingly broad range of sensing capabilities.
Various promising applications for electronic sensing have emerged, for example: chemical hazard
detection, food storage/processing control and safety, seismic geo‐imaging, agriculture, defense and
security, etc. One important application example is Electronic Noses and Tongues [1‐3]. The most
common types of sensors here are based on bulky electrochemical techniques, such as potentiometry

4
and voltammetry, in which it is difficult to achieve large number of sensors in an array (a typical number
of sensors is less than 100), and also on‐chip integration is problematic. However, innovative solutions
using miniature lithography‐defined nanowire electrodes have recently been demonstrated [4,5] –
Fig.II.1.
One of the largest sensor arrays for electronic noses used polymer chemoresistors and consisted of 300
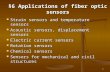
elements [3]. Recently, a hybrid flavor sensing system has been demonstrated that comprised both an
‘electronic tongue’ based on SAW sensors fabricated on a LiTaO3 substrate (Fig. I.2) and an ‘electronic
nose’ based on chemical FET (chemFET) gas sensors [1, 2].
Currently demonstrated ‘e‐noses’ use very different operating principles and have much lower
performance than biological smell sensors (the olfactory system). Different biological noses have 1‐100
million olfactory receptor neurons [1]. As an example, humans can distinguish ten thousand different
substances, and the sensitivity to some chemicals is a few parts per billion. It should be noted that the
olfactory receptor cells are the only neurons in the nervous system that are regularly replaced (they last
about 4‐8 weeks).
Most current sensing systems combine a discrete (and relatively large‐size) sensing element with a
separate electronic circuit. Many commercial sensors have large power consumption (e.g. 100‐500 mW
for chemical sensors [1]). If sensor systems could benefit from scaling and integration, their impact
might be as transformative as that of the transistors and integrated circuits. Two essential enabling
factors are (1) scalability of the transducer and (2) materials compatibility with a standard (e.g. CMOS)
process. Also, for practical widespread applications, it is highly desirable to develop a universal sensor
platform, i.e. a generic structure for downstream processing and interfaces that can be fabricated in
large volumes by a standard process and customized for different stimuli and different applications.
Fig. II.2. Schematic of a SAW taste
sensor [1, 2]
Fig. II.1. Lithographically‐defined gold nanowire electrodes for electrochemical sensing (potentiometry and voltammetry) [4, 5]

5
NEMS structures repesent a possible class of candidates for a universal platform [6]. Indeed different
types of nanocantilevers can be used for sensing of mechanical stimuli (pressure, force, acceleration),
chemicals, magnetic field, temperature, etc. Piezoresistive read‐out has been proven as a suitable way
to sense displacement/resonant frequency, which allows for ‘self‐sensing’ micro/nanocantilevers not
requiring external instrumentation. Silicon is a common material for NEMS fabrication, thus NEMS
technology could be compatible with standard semiconductor processes. Large arrays of NEMS have
recently been demonstrated with integration density of ~6×106 cm‐2 [7] fabricated on 200 mm SOI
wafers (Fig. II.3). These LSI‐NEMS sensor arrays have been demonstrated to be capable of parts‐per‐
billion sensing of the chemical warfare agent simulant, diisomethylphosphonate (DIMP), within a 2s
exposure time.
NEMS technology has a good potential for scaling based both on physics of operation and on availability
of nanofabrication tools. However, a difficult scaling issue is the increased resistance of smaller
elements, which makes impedance matching with the signal‐conditioning circuitry and related noise
management problematic [6]. Monolithic integration of the NEMS elements with the supporting
electronic circuitry could ease the mismatch and noise issues, e.g. by placing the preamplifier as close as
possible to the sensor. A promising approach to the interface problem is the recently demonstrated
direct integration of a NEMS element with a field effect transistor, resulting in immediate signal
amplification (Fig. II.4) [8‐10]. Also, in this approach the scaling of the size of the preamp’s input
transistor is consistent with NEMS element scaling and could offer better impedance matching.
Fig. II.4. NEMS resonator with intrinsic
transistor self‐detection [8, 9]
Fig. II.3. LSI NEMS – large arrays fabricated
on 200 mm SOI wafers [6]

6
A NEMS device can also be integrated with magnetic field sensors (based on magnetic tunnel junctions
or giant magnetoresistance spin valves), which allow for different mechanisms for sensing
deflection/resonance frequency [11‐12]. In the case of such hybrid SpinNEMS, a thin‐film CoCrPt
permanent magnet is placed on the top of a Si cantilever [12]. A spin‐valve sensor in the proximity to the
cantilever is used for the read‐out (Fig. II.5). The integration of magnetic and nanoelectromechanical
components could address the issues of the scaling‐related impedance mismatch and noise mentioned
above. Integration of magnetic elements is fully front end compatible; a 200 mm wafer process for
magnetic sensor sizes ranging from a few 100 nm2 to tens of mm2 has been demonstrated [11]. The
hybrid SpinNEMS can also be used for detection of the very weak magnetic field – in the pT range [11],
which could be a transformative technology for medical imaging. Hybrid (MEMS+Magnetoresistive)
structures have been demonstrated as acceleration sensors for airbags for automotive applications.
Typical power consumption of magnetic sensors is < 1mW.
Fig. II.5. SpinMEMS sensor
It appears that the silicon platform is suitable for fabrication of many sensors, such as NEMS, NW (Nano‐
Wires) etc. This is an encouraging message because the integrated sensor technology can rely upon
more or less standard materials and processes for lower cost. In order to further decrease the
fabrication costs organic materials and spray deposition techniques can be explored for sensor
fabrication (Fig. I.6). Spray deposition is a simple and low cost deposition technique compatible with
large‐area industrial‐scale processes. It allows for convenient layer thickness control over a wide range.
One important attractive feature of spray deposition is a possibility for fabrication of arbitrarily shaped
device structures. A CNT‐based chemical sensor fabricated by spray coating has been demonstrated [13,
14].

7
a b c
Fig. II.6. Spray deposition of carbon nanotubes for sensor applications: (a) Spray deposition apparatus, (b) a
random conductive network formed by the sprayed nanotubes, (c) a complete CNT‐sensor module
References
1. Julian Gardner, “Microsensors for Electronic Noses and Tongues”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. M. Cole, J. A. Covington, J. W. Gardner, “Combined electronic nose and tongue for a flavor sensing system”,
Sensors and Actuators B 156 (2011) 832‐839
3. F. K. Che Harun, J. E. Taylor, J. A. Covington, J. W. Gardner, “An electronic nose employing dual‐channel odour
separation columns with large chemosensor arrays for advanced odour discrimination”, Sensors and Actuators B
141 (2009) 134
4. Alan O’Riordan, “Fabrication & characterization of gold nanowire electrodes for electroanalysis”, SRC/SFI/NSF
Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March
22‐23, 2012
5. K. Dawson and A. O’Riordan, “Towards Nanowire (Bio) Sensors”, J. Phys. 307 (2011) 012004
6. Michael Roukes, Keynote: “Realism in Nanosensing: Hard‐won Insights from the Trenches”, SRC/SFI/NSF Forum
on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23,
2012
7. I. Bargatin, E. B. Myers, J. S. Aldridge, C. Marcoux, P. Brianceau, L. Duraffourg, E. Colinet, S. Hentz, P. Andreucci,
M. L. Roukes, “Large‐scale integration of nanoelectromechanical systems for gas sensing applications”, Nano
Letters 12 (2012) 1269

8
8. Sebastian Bartsch, “Resonant‐Body Transistors”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐
FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
9. S. T. Bartsch, A. Lovera, D. Grogg, A. M. Ionescu, “Nanomechanical silicon resonators with intrinsic tunable gain
and sub‐nW power consumption”, ACS Nano 6 (2012) 256
10. D. Grogg and A. M. Ionescu, “The Vibrating Body Transistor”, IEEE Trans. Electron. Dev. 58 (2011) 2113
11. Paulo Freitas, “Challenges for Integrated Magnetoresistive Sensors”, SRC/SFI/NSF Forum on Integrated Sensors
for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
12. S. B. Patil, A. Guedes, P. P. Freitas, S. Cardoso, V. Chu, J. P. Conde, “On‐chip magnetoresistive detection of
resonance in microcantilevers”, Appl. Phys. Lett. 95 (2009) 023502
13. Paolo Lugli, “Spray Deposition for Sensor Applications”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
14. A. Abdellah, B. Fabel, P. Lugli, G. Scarpa, “Spray deposition of organic semiconducting thin‐films: Towards the
fabrication of arbitrary shaped organic electronic devices”, Organic Electronics 11 (2010) 1031‐1038

9
III. Biosensors(SessionTwo)Contributors:
Dermot Diamond / Dublin City University – Ireland Robert Dutton / Stanford University – USA Michael Goryll / Arizona State University ‐ USA Martin Hegner / Trinity College Dublin ‐ Ireland Richard Brown / University of Utah – USA Arjang Hassibi / University of Texas at Austin – USA
The purpose of many biosensors is to monitor biological processes by detecting the reagents or products of biochemical reactions. Examples are DNA fragments, proteins, pH, and poisonous/hazardous substances. Direct detection of viruses and single‐cellular organizations such as bacteria is also an important task. One application for biosensors is in the area of human health monitoring. Other important emerging applications include food quality control, environmental monitoring, and safety.
A typical approach to detecting biomolecules is affinity‐based detection/receptor‐based sensing. The affinity‐based sensors have an active surface functionalized with biomolecule receptors, pre‐designed to bind with specific target species. In practical applications the affinity‐based sensors must be regularly cleaned and calibrated, and this makes them more difficult to use in autonomous integrated sensor nodes. In principle, alternative “receptor‐less” concepts could allow for more effective and diverse applications. Immobilization of target molecules is also essential for this class of biosensors.
Many of the biosensors currently implemented in lab‐on‐chip systems require additional external instrumentation: valves, injectors, positioners, alignment systems, fluidic manifolds, separate detectors and microscopes, etc. To what extent is it possible to miniaturize and integrate the external instrumentation onto a single chip with the sensing devices?
A fundamental difference of biosensors from other sensors and the Grand Challenge for biosensing is biodegradation, e.g. due to biofouling, which is accumulation of proteins or cells on the sensing surface or bioleaching – extraction of atoms from sensing surface by microorganizms. For example a “foreign body capsule” typically surrounds devices implanted in the human body. Even in ‘mild’ environment, such as monitoring river water, the electrodes exposed to the water suffer from biofilm formation, which happens almost immediately and grows rapidly (Fig. II.1b). The biodegradation causes unpredictable changes in the sensor’s response characteristics (e.g. sensitivity, baseline, selectivity, etc.) and may lead to rapid device failure [1, 2]. Thus, one of the main tasks in biosensor research is to make sensors that work remotely in hostile locations (inside the body, in the environment, etc.) for very long periods of time (years) at an acceptable unit cost. Sensor lifetime can be significantly increased if a periodic testing of small samples is used instead of direct sensing [1, 3]. For sensors, operating in an autonomous mode, this implies that sampling machinery is embedded into the sensors, such as microfluidic devices – pumps, valves etc.
a b Fig. III.1. a ‐ Biodegradation of sensors; b – Biofilm formation on sensing surface (electrodes were exposed to the water of the river Tolka in Ireland) [1].

10
‘Stimuli –responsive’ polymers, e. g. photoswitchable materials can be used for pumping and valving structures to control fluid movement at small scales [1,2]. They potentially offer a cost‐efficient way for on‐chip integration of microfluidics and also are capable for low‐power operation.
Another promising direction is using the stimuli‐responsive (e.g. photoswitchable) polymers to protect the sensing surface from degradation. These materials can switch under light from active (binding) and passive (non‐binding) states and thus control the process of uptake and release of the analyte. The sensor surface remains in a passive state when a measurement is not conducted and is converted into an active state when needed [2]. This approach could delay sensor’s degradation and thus increase its lifetime.
Remarkable progress has been made in liquid chemical sensors which were reduced to microchip sizes, however the operational lifetime is still short [3]. This may not be a problem in some applications where low‐cost disposable sensors can be deployed. For example, Sensicore, Inc a start‐up company (acquired by General Electric) commercialized low cost water analysis chips for reliable measurements of a variety of useful water specifications. Amperometric sensors have been developed that show a small change in current based on the chemicals being sensed. Sensor devices and circuits can be readily made using 0.35
m and 0.5 m technologies [3, 4].
Fig. III.2. Hand‐held liquid chemical sensing device for water testing [3]
Process engineering and modeling are needed for bio‐devices to go from lab science to real products. For example, chemical FET sensors are important technology for biosensing and TCAD tools are needed to support their developments. However, modeling of the chemFET surface morphology is extremely complicated due to large internal degrees of freedom. Various forms of FET biosensors must be modeled, including planar FETs, nanowire FETs, CNTs, etc., for sensing various types of biomolecules. Exact mechanisms and the physical models of each, such as binding kinetics, must be understood in order to create useful TCAD models. Electron transport and charge interaction models for the semiconductor as well as for ionic conduction within the sample being sensed must be fully understood.

11
A promising direction in biosensing is gated nanopores, which in principle allow for single molecule detection. In fact, by analogy with semiconductor field effect transistors, the gated nanopore structures can be regarded as ‘nanofluidic transistors’ [5]. Nanopore membranes can act as selective filters by allowing molecular separation due to size and surface charge. They can perform protein analysis and DNA sequencing with direct DNA sequence readout based on changes in current depending on the nucleotide/base pair moving through the pore, each giving a different signature. One possible driver for nanopore sensing could be low‐cost DNA sequencing that might enable very promising markets in technologies for disease detection, HIV strand detection, and aid in drug development.
Solid‐state gated nanopore structures allow, in principle, fabrication of high‐density arrays of nanopores and integration with electronic readout circuitry [6]. The nanopores can be made e.g. in SiNx membrane [5,6] or in Si membrane on a SOI substrate [7]. As‐fabricated solid‐state nanopores are typically 50‐200 nm in diameter which is too large for direct DNA sequencing. Additional methods for pore shrinking, such as atomic layer deposition, allow further reduction of the pore diameter down to sub‐10 nm sizes [6,7]. Graphene shows considerable promise for nanopore structures due to its remarkable mechanical, electrical and thermal properties. Nanopores with diameters 2‐25 nm were produced in ultrathin graphene films by a focused electron beam [6].
Gating effects in the nanofluidic transistors’ can be very useful for controlling ionic and fluidic transport through nanopores and must be accurately modeled. Although still in a nascent state of development, CAD for design and scaling of sensors and actuators based on artificial nano‐pores is feasible and promising [5].
Fig. III.4. Silicon nanopore fabricated on an SOI substrate [7]
Different sensing modalities are used for nanopore sensors: Ionic current measurement, MOS capacitive sensing, transverse electron tunneling, etc. [6] Typical current deltas in the nanopore signal are of the order of ~1 nA [7]. A big measurement challenge is due to the transient nature of the nanopore signal, for example typical velocities of nucleic acids passing through solid‐state nanopores are 10‐1000 ns per
base [9], thus time resolution of 1 s or better may be required. These fast translocations are regarded
Fig. III.3. Key elements of modeling of
field effect biosensors [5]

12
as a critical barrier for nanopore sensors [9]. To address this challenge very low‐noise preamplifiers are needed with bandwidth > 1 MHz. In today’s practice nanopore measurements are usually constrained to bandwidth below 100 kHz [9]. Most recently, a CMOS‐integrated nanopore platform has been demonstrated that supports signal bandwidth of 1 MHz with signal‐to‐noise ratio exceeding five. The
preamplifier was fabricated using 0.13 m mixed‐signal CMOS process and placed directly inside the
fluid chamber. Transient signals as brief as 1 s from short DNA molecules have been recorded, which is probably the fastest nanopore recording reported today [9].
Nanomechanical cantilever array sensors also show a clear potential for biosensing, and portable nanomechanical devices for quantitative diagnostics are envisioned [10]. Nanometer‐scale force measuring devices allow detailed investigations of energy, kinetics and mechanics of interacting biological molecules. The NEMS biosenors can be used in two modes: the static mode and the dynamic mode. The static mode relies on cantilever’s deflection as result of external stimuli, while the dynamic mode (or resonant mode) relies on changes in cantilever resonant frequency caused e.g by mass change. In the static mode, the sensing medium is not a limiting factor, while the dynamic mode can be very sensitive to the enviroment, for example viscous damping in liquids may severely reduce the Q‐value and limit the performace [12]. Combination of both static and dynamic measurements in one instrument is a promising solution [10]. By scaling mechanical sensors to the micronmeter or nanometer regime, enormous sensitivities can be achieved. NEMS biosensors were used for detection of biological micromolecules (DNA, RNA, proteins), a single virus and bacterium cell. Sensitivities of ~10 aM for concentration and ~0.23 ag for mass detection were demonstrated [12]. A possibility for fast microorganism growth detection ( ~1 h, compared to ~days using conventional methods) makes the cantilever arrays a promising tool for both industrical and clinical use [10].
An important question is whether an integrated biosensor system can be made using standard CMOS fabrication process? [13, 14] Ideally, the sensor arrays (the transducer) would be integrated onto CMOS platform, along with the analog circuitry to measure and output the data. A challenge is that CMOS is primarily optimized to be used for digital circuits and not necessarily sensors [14]. In principle, electrochemical transducers are compatible with CMOS, however there are difficulties in connecting the electrochemical electrodes to the chip (inevitably through pads and at the top of the CMOS process). A big challenge for integrated electrochemical biosensors is the lack of a proper electrode metals in CMOS processes [14]. Another limiting factor is the voltage limitation of CMOS IC that cannot exceed ~ 10 V [14]. Optical and thermal transducers are available in CMOS, however fabrication of mechanical transducers using standard CMOS process is more difficult [14]. Many currently demonstrated integrated biosensor chips are designed for genomic applications (e.g. sequencing). Some examples of CMOS integrated biosensors are given in Table I [13].
Fig. III.5. bioMEMS/NEMS sensors [10]

13
Table III.1. Examples of CMOS integrated biosensors
An important application of biosensors is in the area of neural imaging and signal measurement. A
multitude of functional neural probes have been developed. Various brain sensors have been deployed
on rats and even on a human epileptic volunteers allowing scientists to sense dopamine levels that can
be correlated to physical activities or visualized word‐pairs. Single chip instruments have been
successfully built using CMOS technologies down to 180 nm within reasonable overall chip sizes. These
chips can be built with low power and can include wireless interfaces [3].
References
1. Dermot Diamond, Keynote: “Materials Chemistry and Stimuli Responsive Polymers ‐ The Key to Future Large‐
scale Networks of Chemical and Biological Sensors”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐
FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. R. Byrne, F. Benito‐Lopez, D. Diamond, “Materials science and the sensor revolution”, Materials Today 13 (2010)
16‐23
3. Richard Brown, “Biosensors for the Brain”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC
2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
4. S. Joo and R. B. Brown, “Chemical sensors with integrated electronics”, Chem. Rev. 108 (2008) 638‐651
Fig. III.6. CMOS‐integrated biosensor [10]

14
5. Robert Dutton, “Technology CAD for Modeling and Design of Bio‐Devices”, SRC/SFI/NSF Forum on Integrated
Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
6. K‐H. Paik, Yang Liu, V. Tabard‐Cossa, D. E. Huber, J. Provine, R. T. Hove, R. W. Davis, R. W. Dutton, “Experimental
demonstration and analysis of DNA passage in nanopore‐based nanofluidic transistors”, 2011 IEDM, Washington,
DC, Dec 05‐07, 2011, pp705‐708
6. B. M. Venkatesan and R. Bashir, “Nanopore sensors for nucleic acid analysis”, Nature Naotechnology 6 (2011)
615‐624
7. Michael Goryll, “Silicon Pore Systems for Single Molecule Detection”, SRC/SFI/NSF Forum on Integrated Sensors
for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
8. P. Joshi, A. Smolyanitsky, L. Petrossian, M. Goryll, M. Saraniti, T. J. Thornton, “Field effect modulation of ionic
conductance of cylindrical silicon‐on‐insulator nanopore array”, J. Appl. Phys. 107 (2010) 054701
9. J. K. Rosenstein, M. Wanunu, C. A. Merchant, M. Drndic, K. L. Shepard, “Integrated nanopore sensing platform
with sub‐microsecond temporal resolution”, Nature Methods 9 (2012) 487‐494
10. Martin Hegner, “Quantitative Nanomechaical Diagnostics”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
11. T. Braun, M. K. Ghateskar, N. Backmann, W. Grange, P. Boulanger, L. Letellier, H‐P. Lang, A. Bietsch, C. Gerber,
M. Hegner, “Quantitative tome‐resolved measurements of membrane protein‐ligand interactions using
microcantilever array sensors”, Nature Nanotechnology 4 (2009) 179‐185
12. B. N. Johnson and Raj, Mutharasan, “Biosensing using dynamic‐mode cantilever sensors: A review”, Biosensors
and Bioelectronics 32 (2012) 1‐18
13. Arjang Hassibi, “Biosensor Systems in Standard CMOS: Fact or Fiction?”, SRC/SFI/NSF Forum on Integrated
Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
14. B. Jang and A. Hassibi, “Biosensor systems in standard CMOS processes: Fact or Fiction?”, IEEE Trans. Industrial
Electronics 56 (2009) 979‐984
IV. IntegrationandCircuitStructuresforIntegratedSensorCybersystems(SessionThree)
Contributors:
Simon Deleonibus / LETI – France Ajith Amerasekera / Texas Instruments ‐ USA Glenn Daves / Freescale ‐ USA Eric Vogel / Georgia Tech ‐ USA Manos Tentzeris / Georgia Tech ‐ USA/Ireland Naveen Verma / Princeton ‐ USA
Essential circuit components of sensing systems, include (i) pre‐sensing steps: extraction, separation,
amplification, and (ii) post‐sensing steps: read‐out, signal conditioning, data processing, and
transmission. Correspondingly, an integrated sensor chip can be comprised of a digital unit, an analog
unit, an RF unit or/and an optical unit, in addition to the sensing unit. The integration of these units on a
chip represents significant design and technology challenges, such as how to develop scalable plug and
play design approaches. It is desired for integrated sensor chips to be small and this imposes new

15
restrictions on their stand‐alone operation. In principle, the energy a chip can store will decrease
proportionally with volume which would limit its resources for processing and communication.
Unfortunately alternative chip power sources, other than batteries, that are based on energy scavenging
methods typically offer no more than hundreds of microwatts.
In many applications, the energy, communication‐bandwidth, and real‐time constraints faced by sensing
systems raise the need for on‐node analytics. To enable platform technologies, it is preferable to be able
to scale the local analytics in response to the constraints in a given application. This requires
architectures that provide outputs ranging from raw data to high‐value inferences. Scalable approaches
for embedded computation could thus play a valuable role. Once embedded, these could potentially be
exploited towards assistive functions within the platform itself.
The integration of all the units in one sensor chip also implies incorporating heterogeneous structures
(possible incorporation of MEMS/NEMS, nanowires, bioreceptors etc.), new materials (polymers,
conductive inks, etc.) and CMOS processes that would require process compatibility evaluation.
Technologies that address compatibility issues, allowing flexibility of a possible modular processing flow,
would increase the spectrum of sensor chips applications. An example of ongoing research on
technologies is fabrication using inkjet patterning on paper substrates.
The future “Internet of Things” requires several advances to succeed: distributed and networked
intelligence; overlapping wireless networks for a given area; and seamless, intuitive, and dependable
infrastructure. If an intelligent environment can be built that assesses, anticipates, and responds to
users then the opportunities will be enormous, just to mention a few examples such as health and
wellness management, food quality, industrial control, increased energy efficiency, safety and security
etc. [1, 2]. Advances in wireless sensor nodes/networks will drive innovation in embedded computation
and data communication, power management, and low power analog and digital/memory circuits, and
further advances will require new design methods with multi‐physics and intelligent communication [1,
2].
Fig. IV.1. Wireless sensor node for
Intelligent Ambient applications [1]

16
In principle, the hardware components for the signal chain are already available, e.g. analog front end,
power management, microcontroller, nonvolatile memory, RF etc. [Fig. IV.3]. A major need in
adaptation of these hardware components for intelligent sensor nodes is power reduction. In fact,
orders of magnitude of reduction in power are needed from the current state‐of‐the art [1]. In parallel
further advances in small‐scale energy sources are expected, e. g. better batteries and new energy
harvesting concepts. A still open question is which of the seven essential units of the intelligent sensor
node allows for significant power reduction, a separate physics‐based analysis for each unit is needed.
Some very aggressive technical targets for reduction of energy of sensing, communication and
computation, and at the same time an increase of energy harvesting efficiency are set by the EU’s
‘Guardian Angels for a Smarter Life’ project [2] (Fig. IV.2).
Development of integrated sensor systems is aligned with the current trend of functional diversification.
New materials and disruptive architectures, heterogeneous integration, introducing 3D schemes at the
front end and back end levels, will be introduced to make functional diversification possible. Silicon
CMOS will likely be the base platform beyond the end of scaling (scaling has not yet stopped). Future
innovations will require a strong association and knowledge of systems, devices, and materials from
both a science as well as engineering perspective.
Impressive integration of NEMS and CMOS technologies has recently been achieved. A VLSI‐compatible
nano/microfabricated portable NEMS‐based multi‐gas analyzer was for the first time demonstrated in
2011 [2, 3]. Most recently, in 2012 the first monolithic integration of NEMS resonators in the front‐end
process was reported [2, 4].
Fig. IV.2. Technical targets for
reduction of energy of sensing,
communication and computation
(from the EU’s ‘Guardian Angels for a
Smarter Life’ project [2])

17
Heterogeneous 3D integration and wafer level packaging is expected to push functional diversification
and lead to novel sensor systems. System integration at wafer level (SoW) is also a promising direction
[2, 5]. It can be argued that among different company technological profiles, foundries might be more
suitable for SoW [5].
The envisioned widespread deployment of sensors (e.g. in billions) will be possible only if the sensor
chips can be produced at low cost [6]. Packaging and test currently constitutes a considerable portion of
the total cost for sensors and focused efforts are needed for their reduction (10x and more) [6]. Some
critical gaps that require significant research efforts include:
Design Accuracy – Simplified models and Design Automation tools for sensor node packaging are needed to enable modeling and design of complex systems including statistical variations, to improve design accuracy and better predict actual performance.
Isolation Improvement ‐ Materials are needed to create a cost‐effective ceramic‐like base suitable for many form factors and for the design of robust sensors that are immune to extraneous stress fields (or/and development of sophisticated methodologies that cancel out extraneous stresses).
Test ‐ It is crucial to eliminate the need for custom actuation‐based testers & handlers. Ideally self‐test
methodologies might be based on the reciprocity of most physical mechanisms underlying sensors.
Emerging packaging (Fig. III.4) – 2D and 3D packaging integration; micro‐fluidics components e.g. for medical applications or for cooling of 3D chip stacks, wafer‐level packaging, including e.g. options for TSV chip/wafer stacks and optical packaging, all are important directions for sensor packaging technologies.
Fig. IV.3. First monolithic integration
of silicon NEMS resonators with
CMOS‐FDSOI at the front‐end level [2,

18
a b
c
Integration of chemical/biological sensors onto a CMOS platform results in numerous challenges which
require interdisciplinary research from fundamental materials to final system design [7]. For instance,
careful consideration must be given to the properties of the liquid media and its interactions with the
FET. This is paramount not only to the resolution of the “true” sensing signal from that of other factors
but also to enhancing manufacturability, stability and reliability of these devices. Issues related to
silicon‐on‐insulator FET‐based sensor devices include: stability, reliability, modeling, amplification,
detection, and noise. Circuit level models that provide key insights into system limitations can help
narrow experimental matrices/conditions. A user‐friendly behavioral macromodel for biological
response of FET‐based transistors has been developed for use with commercial SPICE versions and will
enable circuit level analysis of biosensor chips [7, 8].
Courtesy of 3D Plus
Fig.IV.4. Emerging packaging developments [6]: a‐ microfluidic components, b – 3D integration, c‐ wafer‐level packaging with TSV
Fig. IV.5. SPICE Macromodel for BioFET: Equivalent model of dual‐gated biosensor [7, 8]

19
In bio‐measurements, current versus time data, often from multiple sensory inputs could be of high
importance to the user. However information extraction from the fine signal structure is still
problematic for current sensing technologies. Adaptive analysis schemes (e.g. neuromorphic) may hold
long term promise for detecting noisy, drifting signals from thousands of sensors [7]. More generally, in
biomedical and many other applications, the energy, communication‐bandwidth, and real‐time
constraints faced by sensing systems raises the need for sophisticated on‐node analytics [9]. To enable
platform technologies, it is preferable to be able to scale the local analytics in response to the data
constraints in a given application. This requires architectures that provide outputs ranging from raw data
to high‐value inferences. New hardware solutions may be needed for fast and energy‐efficient data
extraction and to provide high‐value outputs. Embedded DSP has demonstrated the transformational
applications that are possible as a result [9]. The application scope of electronic sensing systems will be
ultimately limited by the availability of models of correlations between different sensory signals in
complex systems (e.g. physiological signals [9‐11]). New efficient frameworks for extracting information
from data and machine learning could offer opportunities for inference. Such frameworks could enable
low‐power biomedical devices that can detect e.g. clinically relevant correlations in physiologically‐
complex patient signals needed for closed‐loop response [10]. A low‐power SoC, based on the above
principles, that performs EEG acquisition and feature extraction required for continuous detection on
seizure onset in epilepsy patients has been demonstrated [11].
Fig. IV.6. Cyber‐physical sensing platformincorporating machine learning [9]

20
Sensors fabricated on paper, plastic and other polymer substrates could be a sustainable low‐cost
solution for the first paradigms of ‘Internet of Things’, ‘Smart Skins’ and ‘Zero‐Power’ applications [12,
13]. In fact, inkjet‐printed flexible sensor circuits on paper substrates could form a new “system‐on‐
paper” platform [13]. Recently many different “system‐on‐paper” devices has been demonstrated [12],
for example RF circuits covering UHF up to the millimeter‐wave frequency ranges (mm ID's) including
the state of the art of fully‐integrated wireless sensor modules on paper or flexible polymers. For
example [12] reported the first ever 2D sensor integration with an RFID tag module on paper, as well as
numerous 3D multilayer paper‐based and LCP‐based RF/microwave structures, that could potentially lay
the foundation for the truly convergent wireless sensor ad‐hoc networks of the future with enhanced
cognitive intelligence and "zero‐power" operability through energy harvesting.
References
1. Ajith Amerasekera, “Making Sensors Happen”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐
FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. Simon Deleonibus, Keynote: “Prospects for Nanoelectronics CMOS Scaling and Functional Diversification”,
SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare,
Ireland, March 22‐23, 2012
3. E. Ollier, C. Dupré, G. Arndt, J. Arcamone, C. Vizioz, L. Duraffourg, E. Sage, A. Koumela, S. Hentz, G. Cibrario, P.
Meininger, K. Benotmane, C. Marcoux, O. Rozeau, G. Billiot, E. Colinet, F. Andrieu, J. Philippe, F. Aussenac, D.
Mercier, H. Blanc, T. Ernst, P. Robert, “Ultra‐scaled high‐frequency single‐crystal Si NEMS resonators and their
front‐end co‐integration with CMOS for high sensitivity applications”, MEMS 2012, Paris, France, Jan. 29‐Feb. 2, pp.
1368‐1371
4. J. Arcamone, A. Niel, V. Gouttenoire, M. Petijean, N. David, R. Barattin, M. Matheron, F. Ricoul, T. Bordy, H.
Blanc, J. Ruellan, D. Mercier, N. Pereira‐Rodrigues, G. Costa, V. Agache, S. Hentz, J. C. Gabriel, F. Baleras, C.
Marcoux, T. Ernst, L. Duraffourg, E. Colinet, E. B. Myers, M. L. Roukes, P. Andreucci, E. Ollier, and P. Puget, “VLSI
silicon multi‐gas analyzer coupling gas chromatography and NEMS detectors”, 2011 IEDM, Washington, DC, Dec. 5‐
7, 2011
Fig. IV.7. Active RFID‐based wireless sensor module (904.2 MHz) on paper substrate using inkjet printing technology [12, 13]

21
5. J‐C. Souriau, N. Sillon, J. Brun, H. Boutry, T. Hilt, D. Henry, G. Poupon, “System‐on‐Wafer: 2D and 3D technologies
for heterogeneous systems”, IEEE Trans. Comp. Packag. Manufact. Technol. 1 (2011) 813‐824
6. Glenn Daves, “MEMs Research Needs ‐ A Packaging Perspective”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
7. Eric Vogel, “Integration, Models, and Circuits for Silicon‐based Chemical/Biological Sensors”, SRC/SFI/NSF Forum
on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23,
2012
8. P. G. Fernandes, H. J. Stiegler, M. Zhao, K. D. Cantley, B. Obradovic, R. A. Chapman, H‐C. Wen, G. Mahmud, E. M.
Vogel, “SPICE macromodel of silicon‐on‐insulator‐field‐effect‐transistor‐based biological sensors”, Sensors and
Actuators B 161 (2012) 163‐170
9. Naveen Verma, “Circuit Architectures for Inference: Sensing and Analyzing Complex Physiological Signals in Low‐
power Devices”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House,
Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
10. K. H. lee, K. J. Jang, A. Shoeb, N. Verma, “A data‐driven modeling approach to stochastic computation for low‐
energy biomedical devices”, 33rd Intern. Conf. IEEE Engineering‐in‐Medicine‐and‐Biology‐Soc., Boston, MA, Aug.
30‐Sep. 3, 2011, pp. 826‐829
11. N. Verma, A. Shoeb, J. Bohorquez, J. Dawson, J. Guttag, A. P. Chandrakasan, “A micro‐power EEG acquisition
SoC with integrated feature extraction processor for a chronic seizure detection system”, IEEE J. Solid‐State Circ. 45
(2010) 804‐816
12. Manos Tentzeris, “Inkjet‐Printed Paper/Polymer‐Based "Green" RFID and Wireless Sensor Nodes: The Final
Step to Bridge Cognitive Intelligence, Nanotechnology and RF?”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
13. R. Vyas, V. Lakafosis, H. Lee, G. Shaker, L. Yang, G. Orecchini, A. Traille, M. M. Tentzeris, L. Roselli, “Inkjet
printed, self powered, wireless sensors for environmental, gas, and authentication‐based sensing”, IEEE Sensors J.
11 (2011) 3139‐3152
V. SensorstoSupportUbiquitous/PervasiveAutonomicNetworks(SessionFour)
Contributors:
Brett Warneke / Dust Networks ‐ USA P. R. Kumar / Texas A&M Univ. ‐ USA Joshua Smith / Univ. of Washington & INTEL‐ USA Gregory O’Hare /Univ. College Dublin ‐ Ireland Dominic O’Brien / Univ. of Oxford ‐ UK Gu‐Yeon Wei / Harvard University ‐ USA
The vision is that it will be possible to construct connected networks of sensors that can, for many
applications, make decisions and take actions based on the collected data in an autonomous manner.
An autonomic network is a system somewhat like the nervous system that controls breathing, heart
rate, muscle activity, etc., where engagements of the mind to direct these functions are at most,
minimal. It is clear that, depending on the application, interconnected systems of sensors will not
always lend themselves to the autonomic paradigm and that higher‐level decision‐making will

22
sometimes be required. This is an emerging field that is rich with opportunities for research. The term
cyber‐physical system is used to describe these systems that involve sensory functions, communication,
information processing, and control to operate geographically distributed physical systems.
The desired capabilities of a sensor node in a networked system of sensors include sensing, data
processing, communication, and sometimes self‐powering. The networks are expected to be energy
efficient, scalable and resilient. A sensor network is said to be scalable if the addition of new nodes and
communication links can be easily made while simultaneously improving the functionality of the
networked system. In many applications, the sensor nodes must be untethered from the power grid
and thus must rely on direct collection/conversion/storage of energy to support their operations. It
follows that, in these cases, the sensor node must be designed for very low power operation. A sensor
network is said to be resilient if failures of communication links or neighboring sensor nodes can be
managed by each node in such a way that is able to continuously supply valid data to enable the cyber‐
physical system to perform its intended functions.
Decision and control functions in cyber‐physical systems may either be real‐time or off‐line and the
control function can either be centralized, distributed, or collective. Real‐time control is challenging
since system stability is difficult to guarantee and the need for timely data is an imperative [1, 2]. From
the standpoint of design and operation of the sensor network itself, there are three essential
requirements; synchronization, localization, and reputation/trust [3]. The synchronization concept
essentially requires that the clocks for each node in the system must be synchronized. This is especially
important from an energy conservation point‐of‐view since nodes normally go to sleep when inactive to
save energy and only are awakened when they are to hear and relay a neighboring node transmission or
when they are to send data. Coordination of sleep/wake times among nodes is important from an
energy conservation perspective since failure to do so means that nodes could spend idle awake time
awaiting action by neighboring nodes. It turns out that nodes can exchange local clock information in
such a way that there is polynomial growth in synchronization errors with the number of nodes in the
network. Recent work has shown that it is possible to minimize synchronization errors by exchanging
estimates over different paths [4]; implying that synchronization errors can be bounded even for large
networks with many nodes.
The term localization refers to methods used by each sensor node embedded in the network to
determine its geographical location; especially in situations where data from inertial or GPS sources is
unreliable or incomplete. Localization is very important when the nodes are mobile and connect
through wireless networks. Recently algorithms have been developed for cooperative localization
where, by exchanging data between nodes, the location of a node can be determined very accurately
[5]. It appears that viable localization algorithms can be implemented in such a way that energy usage is
minimized and that accurate location information could play a role in reducing network energy
consumption, e.g., by modulating energy usage based on the distance between nodes. The sensor
network requirement for trust is especially important. At core, this means that the data provided by
each sensor are trustworthy and that the network reliably transmits these data to the decision agents
linked to the network. Thus in the case of node or link failures, the data extracted from the network

23
must be accurate and reliable but also the cyber‐physical system must be strongly resistant to malicious
attacks.
Properties that are important for stand‐alone and scalable autonomic systems are self‐configuration,
self‐healing, self‐optimizing, and self‐protecting. The manner in which these attributes are achieved is
dependent on the particular application; however, it should be said that when autonomic cyber‐physical
systems degrade and/or fail, protection of human safety and property should be the highest priority.
From a control system perspective, cyber‐physical systems represent the third generation of control
theory (Fig. V.1). The first generation was based on analog control, the next on digital control methods
and today, the challenge is to design networked control algorithms which encompasses topics such as
embedded computing, wireless and wire‐line communications, and a substantial increase in software for
protocols and operating systems for networked systems, for information processing and control, for
security, etc. The rapidly increasing complexity of the software systems will likely drive the use of higher
levels of abstraction to reduce/control programming errors such as Model‐Driven Software
Development (MDD) [2]. Examples of challenges faced in the design of networked systems are many
including the minimization of packet collision on wireless networks, the guarantee of timely data access
in real‐time critical systems such as automotive, medical, etc., the definition of architectures and
abstractions that provide convergence between communication and control, and formal methods to
prove that the system always behaves correctly and safely.
Recall that middleware is software that functions as a conversion or translation layer [1]. It enables
applications from disparate platforms or environments to communicate with one another. Middleware
to support autonomic sensor networks faces several grand challenges including autonomy and
adaptability and system challenges such as prolonging network longevity, supporting multiple
application overlays on the same network, multiple locations for databases and provenance for the data,
distributed reasoning, etc. Indeed, intelligent sensing of data is not straightforward, since mechanisms
are needed to harmonize, synchronize, represent and filter data, often moderated by feedback resulting
Fig. V.1 Interacting disciplines and methods in
Cyber‐Physical Systems (CPS) [1]

24
from usage of the data [6]. A Java‐based sensor platform hosting middleware is being evaluated in the
context of the SIXTH middleware system for wireless sensor networks (Figure V.2). Some of the
attributes of SIXTH include re‐configurability of (and the addition of) components at run‐time,
component reusability, utilization of open standards, and complexity hiding. The CLARITY/SIXTH
middleware systems are being demonstrated on a sensors network system in Ireland.
Fig. V.2 The SIXTH Architecture [6]
RFID tags are experiencing rapid growth and are distinguished by their ability to operate at short range
without an internal energy source. Their current application space includes item tagging, with other
potential applications including vehicle ID/tolling, and passports, etc. [7,8] Typically, these devices store
a fixed set of information and, when interrogated by a high frequency source, provide a read‐out of that
data through backscattering of the incident energy. It is interesting to consider the use of these ideas
for sensor applications in which the device would sense and record data and, upon interrogation,
provide a read‐out of the data, preferably at a range longer than the typical one meter of RFID devices.
The WISP tag [7,8] is an RFID powered programmable device that incorporates low power operations
and a software‐defined reader. It consists of a fully programmable, low power micro‐controller, power
harvesting and capacitive storage, and an analog block consisting of a demodulator, a regulator, and a
voltage supervisor. In the UHF regime, backscatter efficiency has benefitted from Moore’s law scaling of
IC’s with reduced voltages. Ranges of up to thirty feet are now achievable [7] (Figure V.3).
Adaptors: Virtual Sensor creation Sensor‐SIXTH integration
Discovery Service: Secure Sensor Access
Receivers: Streaming of sensor data
Notifiers: Filtered sensor data streams

25
Fig. V.3 Microprocessor efficiency and achievable transmission distance versus time [7].
Another approach to passive sensor nodes is to harvest energy from the environment. The WARP
system [7] is able to harvest television band and GSM band ambient energies to support a self‐powered
sensor node. In general, the range of transmission for such nodes has been increasing by a factor two
every four years; benefitting from Moore’s Law scaling. It is believed that the applications space for
energy harvesting sensor nodes is growing as the capability of these nodes expands, including neural
implants, heart pumps, RF‐powered and read cameras, SMS‐powered SMS messaging, etc.
One of the possible solutions for remotely powering sensor nodes is to utilize a combination of optical
and RF signals. In the case of optical power sources, it is necessary that there exist an unobstructed line‐
of‐sight between the optical source and the sensor. One way to circumvent this restriction is to use RF
signals to power an obstructed sensor node and optical signals for unobstructed nodes. As shown in
Table IV.1, the optical power requirements are significantly lower than those of the RF node. In [9], an
experimental optical base station and associated sensor node (Sensor Dust Mite ‐ SDM) were designed
to operate using optical power delivery. A Modulated Retro Reflector system is used by the SDM to
signal the base station optically. Preliminary results indicate that a hybrid system using both optical and
RF power transmission would be much more energy efficient than an all‐RF energy transmission system.

26
Table V.1 Comparison of optical and radio energy transmission [9]
Optical Radio
Path loss Low High
Path type Line of sight required Non line of sight /Line of sight
Link margin Poor Good
Architecture Base station + nodes Flat architecture
Node energy consumption 10s pJ/bit demonstrated nJ/bit
Wireless power transmission Simple‐ photodiode Complex rectification
In the limit, it is possible to envision mobile sensor nodes that are the sizes of insects and that
communicate locally to make collective real‐time decisions for the actions to be taken by the group. A
prototype of an insect‐scale mobile device is the RoboBee, [10] which weighs 60 milligrams, is three
centimeters in size, and flies by flapping mechanical wings. The RoboBee is equipped with a collision‐
avoidance sensor and is capable of making brief autonomous flights. One can imagine future
generations where a flock of RoboBees perform in unison to accomplish a prescribed task.
References
1. P R Kumar, “Cyberphysical Systems”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. K‐D Kim and P.R. Kumar, “Cyber‐Physical Systems: A Perspective at the Centennial”, Proc. IEEE 100 (2012) 1287‐1308
3. Brett Warneke, Keynote: “Synchronization, Localization, and Reputation for Networked Sensors”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
4. A. Giridhar, and P. Kumar, “Distributed Clock Synchronization over Wireless Networks; Algorithms and Analysis”, Proc. 45th IEEE Conf. Decision Control, 2006, pp. 4915‐4920
5. H. Wymeersch, J. Lien, and M. Zin, “Cooperative Localization in Wireless Networks”, Proc. IEEE 97 (2009) 427‐ 450
6. Gregory O’Hare, “Autonomic Sensing Infrastructure”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
7. Joshua Smith, “RFID Sensor Networks”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
8. S. Roy, V. Jandhyala, J. Smith, D. Wetherall, B. Otis, R. Chakraborty, M. Buettner, D. Yeager, Y‐C Ko, and A. Sample, “RFID: From Supply Chains to Sensor Nets”, Proc. IEEE 98 (2010) 1583‐1592
9. Dominic O’Brien, “Optically Powered ‘Smart Dust’ Motes”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
10. Gu‐Yeon Wei, “RoboBees: A Convergence of Body, Brain, and Colony”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012

27
VI. SensorsforPhysicalWorldInterfaces:ApplicationLandscapefor FutureIntegratedSensors(SessionFive)
Contributors:
Jan Rabaey / UC Berkeley ‐ USA Anuj Batra / Texas Instruments ‐ USA Pol Mac Aonghusa / IBM Dublin ‐ Ireland Joseph Paradiso / MIT ‐ USA William Kaiser / UCLA ‐ USA Kevin Fu / U Massachusetts ‐ USA
SmartercitiesperspectiveFrom a societal perspective, a smart city is a welcoming and inclusive city designed to efficiently and
effectively meet the needs of residents. A smart city is characterized by easy access to government
services, e.g., simple driver’s license renewal processes; by systems designed to enhance public safety;
by rapid access to effective healthcare, e.g., electronic accessibility to medical services and records;
energy efficiency, e.g., control of power delivery and consumption systems; expediting traffic flows to
achieve energy and time efficiencies; support of knowledge creation, sharing and innovation, e.g., broad
access to knowledge sources, learning and creativity resources, etc. It is clear that a smart city is in
effect a cyber‐physical‐social system since it must incorporate people who provide contextual meaning
and who interact in an ad‐hoc way [1]. Cyber‐physical‐social systems are differentiated from cyber‐
physical systems in which people are external actors.
It seems clear that cyber‐physical support for smart cities is confronted with the problem of a rapidly
exploding volume of data (approaching ~ ZetaBytes = 1021 Bytes) that must be sensed, collected,
processed, and acted upon. The challenge of extracting insights that can support smart city concepts
from such a volume of data is daunting. This may lead to the need for intelligent placement of data
sensing and processing resources, e.g., local stream processing based on dynamic rules as a mechanism
to reduce data transmission and computation loads by sharing the collection and processing of massive
data. This more distributed structure will need to be designed in such a way that energy and network
performance requirements are minimized. Inexorable increases in complexity will lead to changes in
programming architectures and algorithms to deal with issues such as the non‐scalability of data
recovery and checkpoint processes.

28
Swarmvisions.Imagine a future where sensor nodes are tiny, abundant, and possess RF radios so that in effect, their
numbers would be so great that they might be considered as a ‘swarm’ of sensors [2]. This idea is in
some ways an extension of wireless sensor technology trends and raises interesting questions about
‘swarm intelligence’ and possible applications. Wireless sensor network growth has been slower than
expected due to an inadequate learning curve, reliability questions, energy constraints and lack of inter‐
operability. A missing link in the rapid expansion of wireless sensor networks is between sensors,
actuators, networks, etc., and applications. The desired characteristics of an operating system to
perform this linkage are: support for heterogeneity, distributed operability, high reliability, context‐
aware operations, dynamic with respect to support of applications, secure, and the ability to operate in
an environment that is sparse in computational resources. Much has been learned from the
development of operating systems for multi‐core processors, e.g., Tessellation,
(http://tessellation.cs.berkeley.edu/#Home::id.2) where its functions are defined by data‐streams, not
computation. The swarm operating system needs to be open with respect to its interfaces to encourage
the development of applications, e.g., the development of a free heart rate monitor for the Apple and
Android devices. The swarm stack is shown in Figure VI.2 below:
Fig. VI.1 A functional perspective for the
services provided by a smart city [1]
Fig. VI.2 A vision for the structure of the
swarm system [2]

29
Just as the web sprouted from a networked ensemble of personal computers, true ubiquitous
computing will arise from an armada of networked devices installed for other purposes [6]. There are
already emerging examples of sensor‐based systems for smart environments (e.g., for HVAC comfort
control, responsive lighting, etc.), for digital “omniscience” (with examples such as MIT’s DoppelLab, and
tracking & activity recognition for worker safety), augmentation of human perception, as in
proprioception inputs from sensory receptors, and even for evoking a sense of empathy via socially
interactive cameras. Once affordances are shared across devices, the human environment will be
complemented by an ecology of devices & applications; a transition that will likely happen rapidly once
begun; and perhaps will signal the beginning of the deployment of swarm systems. A prime challenge
for the technical community is to determine the acceptable interfacing of humans to this electronic
nervous system.
A Body Area Network (BAN) is a communications technology that is optimized for low power
consumption and operates in, on, or around the human body to enable a variety of applications
including medical, consumer electronics, and personal entertainment [3]. A BAN must be expected to
support a wide range of sensors and applications, with some examples given in Table VI.1
Fig. VI.3. The role of the proposed swarm
operating system [2]

30
Table VI.1. Examples of sensor applications [3]
Requirements for the BAN Physical (PHY) layer and for the Media Access Control (MAC) layer are given
below:
• General:
– Sensors located inside or on body
– Low‐cost and disposable
• PHY:
– Range: 3 meters
– Data rates: 100 kbps – 1 Mbps
– Peak‐power consumption 3‐5 mA (note: radio is 80‐90% of total power)
– Robust in noisy and interference‐limited environments
– Coexist with legacy devices
MAC and Security: – Star topology – Support for streaming and episodic data – Simple setup mechanism with short access times – Support for QoS (Quality ofService) – Efficient power management – micro and macro sleep intervals – Support for alarms – Support for strong security
IEEE 802.15.6 Narrowband PHY/MAC meets these requirements. In addition, the 802.15.6 standard is
designed for a low peak‐power implementation of narrowband PHY and the protocol employed provides
power savings in the streaming and episodic modes of operation. In the streaming mode, the sensor
node is asleep except when awakened and, in the episodic mode, the sensor node does not transmit
until the data meets Quality of Service (QoS) requirements, thereby reducing the number of messages
to be transmitted. In any case, 80‐90% of the power consumed by the BAN is attributable to the radio.
There is a need to standardize the interface between the radio and the BAN sensors as this would
facilitate broader development and utilization of BAN systems. The goal is to support multiple sensors
using a single radio.

31
Even in view of the fact that the dominant consumer of power is the radio, there is considerable merit to
taking a “systems‐view” when designing the radio, sensor, and sensor interface, where the goal should
be to minimize overall power consumption, not just radio power.
Local Area Wireless and BAN systems can be used to connect biological and medical sensors to the
internet and thence to the medical enterprise and medical service providers. There are several
motivations for establishing this connectivity including assurance of therapy outcomes in a field setting,
establishment of dosage response curve data given subject behavior patterns, provision of advanced
diagnostics, and reduction of the rate of hospitalization [4]. The envisioned systems operate at the
intersection of the disciplines of healthcare, telecommunication, microelectronics, and information
technology. Immediate applications include stroke rehabilitation by monitoring wireless accelerometers
and reduction of pressure ulcers resulting from extended application of pressure to the skin. Pressure
ulcers are the cause of 50,000 deaths in the U.S. each year and result in two million days of
hospitalization. In the case of pressure ulcers, a scanner can be used to measure sub‐epidermal
moisture and tissue dielectric properties to detect the onset of pressure ulcers. As another example,
human bio‐mechanical efficiency can be measured in real‐time, e.g., via wireless foot motion sensors.
These data are useful to guide the improvement of human performance.
The integration of wireless sensors for health and medical applications offers vast opportunities to
reduce suffering and medical costs. The integration of wireless sensors also provides unprecedented
engineering challenges including assurance of system integrity, collection of massive and diverse data
that are of value in predicting treatment outcomes, and there are design challenges for cost reduction
and energy efficiency, which vary with the application.
There have been several alarming examples of the vulnerability of patients dependent on pacemakers,
defibrillators, insulin pumps, etc., to malicious security breaches by hackers [5]. Privacy and security
issues are challenges that will grow with emerging integrated sensor systems and resultant applications
unless appropriately dealt with in the cyber‐security systems of the future. Indeed, the realization of
the health and cost benefits offered by connected therapeutic and monitoring devices hinges on the
development of security mechanisms that ensure the safety of the patients using these cyber‐physical‐
health systems. An illustration of one approach to protecting an Implanted Medical Device (IMD) is
given in [7] and is illustrated by Figure IV.4 below.
Figure VI.4. Radio Shield/Jamming for Implants [Gollakota et al., ACM SIGCOMM ‘11]

32
References
1. Pol Mac Aonghusa, “Smarter Cities Perspective”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐
FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. Jan Rabaey, Keynote: “Swarm Visions”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030,
Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
3. Anuj Batra, “Application‐optimized Wireless Sensor Network Interfaces”, SRC/SFI/NSF Forum on Integrated
Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
4. William Kaiser, “Future Integrated Sensors in Wireless Health”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
5. Kevin Fu, “Security and Privacy for Implantable Medical Devices”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
6. Joseph Paradiso, “Connecting to the Emerging Nervous System of Ubiquitous Sensing”, SRC/SFI/NSF Forum on
Integrated Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
7. Shyamnath Gollakota, Haitham Hassanieh, Benjamin Ransford, Dina Katabi, and Kevin Fu, “They Can Hear your
Heartbeats: Non‐Invasive Security for Implantable Medical Devices,” SIGCOMM 11, April 15‐19, 2011, Toronto,
Canada
VII. FISCPerspectives:ResearchNeedsandPotentialResponses(SessionSix)
Contributors:
Steve Hillenius / SRC ‐ USA Fionn Murtagh / SFI – Ireland John Cozzens / NSF – USA Juan Rey / Mentor Graphics – USA Paul Franzon / North Carolina State Univ. ‐ USA
Dr. Steven Hillenius [1] described the attributes of a research topic that are necessary for the formation
of pre‐competitive university research programs with industry support. These include:
The topic must be critical to the perceived needs of industry
The research topic needs a well‐defined focus
The topic must offer significant potential to attract a number of sponsors
The topic must maximize opportunities for synergy between participants and minimize possible
conflicts of interest
The research programs must generate appropriately trained students.
At the conclusion of his presentation, Dr. Hillenius gave a vision for a research center that seemed to
meet these criteria. Specifically a center for “Ambient Intelligence Technology – from sensors to
dynamic swarms to mobile devices to cloud” [1]

33
Prior to presenting this conclusion he gave a list of research topics that he had extracted from the FISC
Forum, some of which could satisfy the above criteria. His list is:
New devices, tools, and techniques for power reduction
Lightweight/small form factor power provision, and energy harvesting.
Models for information extraction from multi‐sensoric data
Need efficient frameworks for extracting information from data
Understand such frameworks from the perspective of low‐power platforms
Self‐test for sensors
New architectures and algorithms to meet security, throughput, and latency requirements of
sensor networks (both the sensor itself and any network to which it connects).
Given different/alternate sensor platform media, such as paper, new architectures and
optimization
Ambient Intelligence architectures
Standardized interfaces for ubiquitous sensors
Data management
Networks for ubiquitous sensors
NEMS scaling
Read‐out schemes to minimize mismatch
Noise minimization
Bio‐sensors for (semi) permanent monitoring
Need breakthrough understanding of surface science, novel materials, etc. A multi‐scale
challenge
nm‐scale for gates for Si pore structures
CAD for multi‐scale sensor design
Wafer‐scale design/packaging technologies
How to make long‐term reliable (unattended) implanted biosensors that work for many years in
harsh environments
How to make good pumps and valves on chip (borrow ideas from nature)
Photo switchable materials – light activated valves
Electrostatic pumps
Better modeling for all aspects of sensors, both physical and electronic, from nano‐element level
to system level
Research in advanced functional materials – how to better functionalize various sensors
How to deal with not only noise but element variability, selectivity, and “signal to interference” Information 'taming'; context‐aware, real‐time automated data management, to autonomically
transform data into information, and subsequently, into knowledge.
Standardization of design, fabrication processes, and materials utilized in sensor manufacturing
to replicate the success of having a shared platform such as CMOS technology.
Better integration of multi‐scale device simulation and design tools, sensor development tools
'from atoms to systems'.

34
Dr. Fionn Murtagh described several areas for which the opportunity to apply integrated sensors
systems is significant including connected health, energy, smart cities, agriculture, and the environment
[2]. An example of connected health is the data transfers and analyses that typically occur from data
collection‐to‐diagnostics‐to‐treatment protocols. For example, IBM’s Watson is beginning to offer
analyses and probable test and treatment protocols based on algorithms that process vast data
repositories. Some time ago there was an exercise involving many of the bio and pharmaceutical
companies in Ireland, together with computing and services corporations, to list major areas of
opportunity relating to research in connected health.
Dr. Murtagh indicated that the European Commission’s Strategic Energy Technologies (SET) Plan has set
a 2020 target for a 20% share of energy from low carbon sources, a 20% decrease in the use of primary
energy through efficiencies, and a 20% reduction in CO2 emissions. Even more stringent goals have been
set for 2050. Roadmaps that would achieve these goals have been developed and these embody, in a
major way, the use of sensor networks for monitoring and control [2].
The European Common Agriculture Policy is to be reformed in 2014. Reforms will deal with economic
challenges, e.g., food security, price variability, with environmental challenges, e.g., water and air
quality, soil depletion, etc., and with territorial challenges such as maintaining the vitality of rural areas.
Information and communication technologies are anticipated to play a key role across the spectrum of
pre‐cultivation, crop cultivation and harvesting, and post‐harvest activities.
He indicated that all of these applications and many others that data models and processing algorithms
will play a key role in managing and interpreting the massive amounts of data. In some respects
according to Christian Belady, data are really the next form of energy and it makes sense to combine
generation and data center capacity into ‘data plants’. Because it had been dealt with in earlier talks,
Dr. Murtagh also touched on the recently developed computational technique known as compressive
sampling whereby, under appropriate circumstances, the sampling of vast quantities of data can suffice
for impressive ability, through signal processing, to restore full data sets at full resolution to a good
approximation.
In Dr. Murtagh’s view some of the research challenges include [2]:
Massive data streams, context awareness, and real‐time automation
Standardization of design, fabrication processes, and materials
“Virtual engineering”, the integration of simulation and design, and
“Internet of things”; Web 3.0; submissive, robust and trustworthy communication
Dr. John Cozzens of the U.S. National Science Foundation (NSF) described some of the research in his
division intended to address the “Big Data” problem [3]. Examples of the Big Data problem include the
ARGUS‐IS surveillance imaging system that produces raw data at a rate of 770 Gbps and the Compact
Muon Solenoid detector in the Large Hadron Collider which produces raw data at a rate of 320 Tbps.
These systems illustrate that our ability to collect data far exceeds our ability to extract information

35
from it in a timely manner. There is emerging the idea of Compressive Sampling (CS) or Sensing that
strives to reduce the dimensionality of the problem space. The basic notion is to sense a number of
linear functions of the data where the number of these functions is much less than the dimensionality of
the data. This counterintuitive idea is surprisingly powerful because in many cases it can be shown that
a properly chosen set of functions (a basis set) can very accurately represent the data [4, 5]. NSF funds
research to utilize the CS concept in situations where low power operations are required, e.g., wireless
infrastructure monitoring of bridges http://compsens.eecs.umich.edu/.
NSF research priorities include assuring data integrity and validity, data calibration, reducing power
consumption, assurance of system‐level security, and closer coordination with the systems research
community. Progress in sensing modalities will have applications in health‐care, e.g., e‐health, energy
reduction, monitoring critical infrastructure and on the economy. Overall, it is believed that
contemporary machine learning techniques enabled by compressive sampling will play a pivotal role in
addressing the Big Data problem. To accomplish these goals, there is a need to develop devices that do
sensing, compression, and processing simultaneously.
Mr. Juan Rey of Mentor Graphics indicated that from an industry perspective, standards are needed to
enable movement from a multiple‐niche market to an infrastructure that can support a diverse set of
hardware and software [6]. He asked the attendees if it is possible to make an open design platform
available. Educational needs for students in the FISC area will need include both depth and breadth
from transducers‐to physics and chemistry‐to networked sensor systems. Students will need to be well‐
grounded in engineering ethics and they should be well‐equipped with software skills including
distributed and multi‐threaded computation, managing huge amounts of data and designing system
interfaces that are useful.
Relative to the current state‐of‐the art in sensor systems, there is a need to move from the carefully‐
controlled laboratory environment with ‘clean’ samples to the complex and contaminated environment.
The sensor detection range needs to be extended, in many cases, over a full logarithmic scale to provide
biomimetic capabilities. Furthermore, the shelf‐life of sensors needs to be extended for practical
applications. In general there is a need to develop design tools with the capability to respond to diverse
needs and this indicates that we should move from point‐focus tools to a design perspective. This must
be accompanied by a focus on testability from the component to the system level. The design of
functional components for sensing is not enough however for the integrated system must function
properly; and this entails a broad range of topics ranging from materials, interfaces, processes, data
management, capacity, etc.
Mr. Rey stressed the need to comprehend the division of processing responsibilities, i.e. what can and
should be processed locally versus what should be processed centrally. Moreover, interfaces to data
should be designed to work remotely to minimize invasiveness on sensor performance. Finally, sensor
systems bring with them concerns about privacy, security, intrusion, etc., and these elements must be
considered in their design [6].

36
Dr. Paul Franzon began by discussing some of the BIG problems where sensors systems will play an ever
more important role [7]. For example, how can the planet feed nine billion people by 2050, how can the
efficiency and efficacy of healthcare be improved, how will society obtain an adequate supply of clean
water, how can the urban infrastructure be restored or improved, how can energy utilization efficiency
be improved, and several others. He then classified the research challenges into four principal areas:
autonomic action; node functionality; security and privacy, and energy management.
In the autonomic action area, he envisioned that this might be supported by an open platform with
collective programming and data management. The open platform could be managed by a swarm
operating system that is self‐installing and self‐configuring. The sensor system would support SQL‐like
queries by users and would embody collective intelligent processing within the network. It is necessary
that the sensor system exhibit high degrees of resilience and robustness, providing high Quality of
Service despite poor links whether 4G LTE or sensor‐specific radios are utilized. The envisioned sensor
system would be coupled to a self‐actuating control system with natural user interfaces [7].
It is essential that the sensors themselves be robust enough to support field‐deployment. Sensors of all
types (gas, bio, chemical, etc.) should operate for a long time utilizing ml volumes and mW of power.
When used for medical applications, the goal should be to maximize external sensing of internal body
functions. In some applications, it will be necessary to know the sensor physical location with a high
degree of accuracy [7].
Security and privacy issues will be paramount for sensor systems and provisions are necessary for data
security, intrusion prevention and privacy protection including prevention of identity hijacking and the
need to keep others data private. In the energy management area, a goal would be to give the
appearance that the system is operating continuously despite being off much of the time for energy
conservation purposes. As a guiding principle the sensor components should be designed to maximize
data utility while minimizing data communication due to high RF communication energy costs. The
sensor system must be able to achieve useful ‘mission lifetimes’ through techniques such as battery
management, energy harvesting, and ultra‐low power electronics and sensor subsystems [7].
References
1. Steve Hillenius, “FISC Perspectives: Research Needs and Potential Responses”, SRC/SFI/NSF Forum on Integrated
Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
2. Fionn Murtagh, “Convergence: From societal challenges to sensor networks”, SRC/SFI/NSF Forum on Integrated
Sensors for Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
3. John Cozzens, “Research needs and potential responses”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
4. E. J. Candes and M. B. Wakin, “An Introduction to Compressive Sampling”, IEEE Signal Processing Magazine, 25
(2008) 21‐30.
5. R. G. Baraniuk, V. Cevher, . M. B. Wakin, “Low‐Dimensional Models for Dimensionality Reduction and Signal
Recovery: A Geometric Perspective”, Proc. IEEE 98 (2010) 959‐971

37
6. Juan Rey, “The Industry Perspective”, SRC/SFI/NSF Forum on Integrated Sensors for Cybersystems ‐ FISC 2030,
Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
7. Paul Franzon, “Little Sensors to solve BIG PROBLEMS”, SRC/SFI/NSF Forum on Integrated Sensors for
Cybersystems ‐ FISC 2030, Carton House, Maynooth, Co. Kildare, Ireland, March 22‐23, 2012
VIII. ProposedResearchThrusts
1. The Integrated Sensor Node A. Universal sensing platform
Is it possible to conceive of a Universal Sensor, based on a generic structure, that can be customized for
different stimuli and different applications? For example, NEMS, in principle supports sensing
force/acceleration, chemicals, magnetic field, temperature, light, biosensing etc. To what extent can a
general NEMS sensor be designed that can be adapted to different modalities, integrated on CMOS and
support mass applications? If sensor systems could benefit from scaling and integration, their impact
might be as transformative as that of the transistors and integrated circuits.
B. Sensor Fouling
In many biological and environmental applications, it is important that the rate of sensor degradation
must be controlled so that a sufficiently long operational period can be sustained. Research is needed
for sensors capable of self‐renewal and self‐authentication.
C. Sensor Circuits
In many applications, the energy, communication‐bandwidth, and real‐time constraints faced by sensing
systems raise the need for on‐node analytics. To enable platform technologies, it is preferable to be able
to scale the local analytics in response to the data constraints in a given application. This requires
architectures that provide outputs ranging from raw data to high‐value inferences. Scalable approaches
for embedded computation could thus play a valuable role. Once embedded, these could be exploited
for necessary functions within the platform itself, e.g. self‐test. Indeed, self‐test may be of value at post
manufacturing because sensor test at this point is often quite expensive. While many hardware
components for the sensor chip are already available, e.g. analog front end, power management,
microcontroller, nonvolatile memory, RF etc., the current state‐of‐the‐art cannot support the envisioned
full scale deployment of a ubiquitous sensor system. The two primary barriers are power and security.
Sensor circuits need orders of magnitude reduction in their operating power from current levels. New
hardware solutions may be needed, such as e.g. neuromorphic circuits for fast and energy‐efficient data
extraction; new nonvolatile memory architectures for power savings; etc. Solutions for embedded
cryptoprocessor as part of the sensor chip also need to be explored for a required level of security.
D. Integration, Packaging and Test
The envisioned widespread deployment of sensors (e.g. in billions) will be possible only if the sensor
chips can be produced at low cost. The integration of all required units in one sensor chip implies
incorporating heterogeneous structures (e.g. NEMs, bio receptors etc.), new materials and processes
that would require process compatibility evaluation with CMOS. Packaging and test currently constitutes

38
a considerable portion of the total cost for sensors and focused efforts are needed for their reduction
(10x and more). One promising direction is wafer level packaging. For test, it is crucial to eliminate the
need for custom actuation‐based testers & handlers. Ideally self‐test methodologies might be based on
the reciprocity of most physical mechanisms underlying sensors.
E. The Ultimate Sensor Node
Intelligent sensor nodes require new information technologies that can provide at least an order‐of‐
magnitude reduction in energy utilization relative to the energy consumed by equivalent CMOS
technologies, circuits and systems. Out‐of‐box ideas are needed on pathways to substantial reductions
in energy requirements of future information technologies. It is believed that substantial energy use
reductions are feasible based on principles and concepts derived from extraordinary energy efficiency of
biological systems that process information at very high rates. More specifically, analysis of biological
systems suggests following targets for improvements [1]:
Memory Density: 1000x more
Logic Density: >10x more
Power: 1000,000x less
Algorithmic efficiency: 1000x less
2. Network Operations
In those applications where many sensors are deployed to develop real‐time data, the issues of network
management become paramount. For example, network latency must be minimized if the data
collected are to be used to for real‐time control. There are many possible configurations that can be
envisioned for the network including centralized, distributed, or swarm topologies. In the centralized
configuration, it is likely that in many applications, there will be an enormous flow of data into the
central processors and the need for data management and the processing of these data to extract
actionable information will be paramount. One positive for the centralized configuration is that
conventional operating systems could probably be utilized effectively. In a distributed network
configuration, data gathering and processing for designated geographical areas of the sensor
distribution would occur and this processed data would be transmitted to a central decision‐making
processor. The advantage of the distributed network configuration is that network data loads would be
significantly reduced and computation at the distributed processing sites could be simplified, but this
would likely necessitate utilization of a distributed operating system. Whatever configuration is used,
it is likely that these networks will need to transmit vast amounts of data and that the receivers of this
data stream must rapidly process the data to draw inferences on the state of the sensed system. The use
of data compression algorithms to reduce the Bid Data problem is a promising research direction.
An interesting question that emerged during the forum concerned the possibility of creating a swarm
operating system to enable collective data sharing and decision making. It is conjectured that if this is
possible, then data transmission over long distances could be minimized thereby reducing energy
consumption and real‐time decision‐making at the node level could be facilitated. In the strictest sense,
a swarm operating system would facilitate autonomic operations for the sensed system. At this writing,

39
the class of autonomic systems to which a collective sensing and control systems could be applied is not
clear.
In networked sensor systems, there needs to be a guarantee of immunity from attacks that would allow
external information sources to pose as a trusted sensor and thereby sabotage the sensor system. By
the same token, it is important that the network be immune to attempts to obtain network data by non‐
authorized individuals. Finally, the network needs to be robust in the sense that if one of more links fail
or become suspect, it will minimize false alarms and degrade gracefully.
3. System Operation and Control
The time‐dependence for operation of the decision and control aspects of a sensor system is dependent
on the application. In those applications where near‐real‐time operation is needed, rapid response to
the collected sensor data is a high priority. This means that analysis of the data must be done in near
real‐time and the decision and control algorithms must be computationally efficient. An example of this
type of system might be a visual surveillance system for a city where the rapid dispatch of security
personnel is required, for example, to apprehend burglars. Management of traffic flows in a city is
another example of near‐real‐time application. For example, in the case of an accident where some of
the roadways cannot be utilized, the sensor network should respond quickly to re‐route traffic away
from the accident area. In the case of mass transportation systems, it becomes even more important to
manage traffic flows to prevent major loss of life when there is an accident in the system.
Environmental monitoring networks for pollution or for contamination of the food and water supplies
will usually operate at less than real‐time speeds but will require an exacting analysis of the data to
localize problem areas and to determine the appropriate course of action. In some cases, the
monitoring of resource use, such as water can be used to detect excessive usage and the control
response could be a telephone call to the user inquiring about an unexpected increase in consumption.
Since autonomic systems by their very definition are closed loop, i.e., control actions are determined by
a pre‐defined algorithm, it is critically important that the action taken not exacerbate the problem
rather than mitigating it. Careful studies of the stability of closed loop sensor systems is need to insure
that actions taken by the system will not be stabilizing. Autonomic systems must operate successfully in
the face of noisy or bad data and they must be immune to external tampering of the sensor network.
Methods to achieve this objective will be an important component of the design and implementation of
useful autonomic systems.
References
1. R. K. Cavin, P. Lugli, V. V. Zhirnov, “Science and Engineering beyond Moore’s Law”, Proc. IEEE 100 (2012) 1720‐
1749
Related Documents