
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Master of Science Thesis
Department of Energy Technology
KTH 2021
Coolant Filling Simulation Model in 1D with GT-
Suite
TRITA: TRITA-ITM-EX 2021:492
Kapil Vaidya
Xavier Navarro Palau
Approved
2021-08-26
Examiner
Justin Chiu
Supervisor
Justin Chiu
Industrial Supervisor
Harun Poljo
Contact person
Harun Poljo

Abstract
Driven by the goal of decreasing emissions and pollutants towards a more sustainable future,
the automotive industry is undergoing a rapid transition towards battery-powered electric
vehicles. This shift to sustainable transport is fast-paced, and new technical solutions are being
offered on a regular basis to fulfil the future needs for electric vehicles, including battery-
electric trucks. This continuously necessitates a fast development of the battery-electric truck,
along with the cooling system. To validate the cooling system, Scania's preferred approaches
are testing and 3D simulations. However, these approaches are time-consuming and cannot
match the pace of the design or the development.
This thesis addresses the implementation of using 1D Simulations (GT-Suite) to carry out
coolant filling simulations as a more efficient approach by studying the filling of the battery
cooling system in an electric truck and, later, validating the results obtained with a test rig. In
this thesis, different cases were defined, each adding more complexity to the circuit, and the
parameters studied were the filling times and the location of air traps. Finally, a case with a
closed circuit and running a coolant pump was developed to study the possibilities of devising
quicker deaeration techniques for the circuit.
The work completed in this thesis may be used as an example of how filling simulations can be
performed with GT-Suite. This thesis is a good starting point, exploring a vast potential in using
1D Simulations to simulate the coolant-air interaction in a cooling system. Nonetheless, the
findings revealed that GT-Suite v2020 and v2021 lack a robust model to properly simulate the
interaction of coolant and air in certain sections of the circuit. In addition, the simulation model
failed to obtain a steady-state solution in some cases resulting in discrepancies between the
results from the test rig and the simulations.
In conclusion, it was found that 1D simulations are not an ideal way forward when individual
components of the cooling circuit are being considered, for example, the cooling plates, but are
much quicker and seem to be a promising method to get an overview on a system level.
Keywords: GT-Suite, CFD, 1D Simulations, Battery cooling, BEV Truck, Deaeration, Air
Traps

Sammanfattning
Fordonsindustrin drivs av målet att minska utsläppen och föroreningarna mot en mer hållbar
framtid och genomgår en snabb omställning mot batteridrivna elfordon. Övergången till
hållbara transporter går snabbt och nya tekniska lösningar erbjuds regelbundet för att möta de
framtida behoven av elfordon, inklusive batteridrivna lastbilar. Detta kräver kontinuerligt en
snabb utveckling av den batteri-elektriska lastbilen, tillsammans med kylsystemet. För att
validera kylsystemet är Scanias föredragna metoder testning och 3D-simuleringar. Dessa
tillvägagångssätt är dock tidskrävande och kan inte matcha takten i designen eller utvecklingen.
Denna avhandling behandlar implementeringen av att använda 1D-simuleringar (GT-Suite) för
att utföra kylvätskefyllningssimuleringar som ett effektivare tillvägagångssätt genom att
studera fyllningen av batterikylsystemet i en elektrisk lastbil och senare validera resultaten som
erhållits med en testrigg. I denna avhandling definierades olika fall, var och en lägga till mer
komplexitet till kretsen, och de undersökta parametrarna var påfyllningstiderna och platsen för
luftfällor. Slutligen utvecklades ett fall med en sluten krets och kör en kylvätskepump för att
studera möjligheterna att utforma snabbare deaerationstekniker för kretsen.
Arbetet i denna avhandling kan användas som ett exempel på hur fyllningssimuleringar kan
utföras med GT-Suite. Denna avhandling är en bra utgångspunkt och utforskar en enorm
potential i att använda 1D-simuleringar för att simulera kylvätske-luftinteraktionen i ett
kylsystem. Resultaten visade dock att GT-Suite v2020 och v2021 saknar en robust modell för
att korrekt simulera interaktionen mellan kylvätska och luft i vissa delar av kretsen. Dessutom
kunde simuleringsmodellen inte få en steady state-lösning i vissa fall vilket resulterade i
skillnader mellan resultaten från testriggen och simuleringarna.
Sammanfattningsvis konstaterades det att 1D-simuleringar inte är en idealisk väg framåt när
enskilda komponenter i kylkretsen övervägs, till exempel kylplattorna, men är mycket snabbare
och verkar vara en lovande metod för att få en översikt på systemnivå.
Nyckelord: GT-Suite, CFD, 1D-simuleringar, Batterikylning, BEV Truck, Deaeration, Air
Traps

Acknowledgement
We would like to express our sincere gratitude to everyone who has helped us through this
master thesis.
First and foremost, we would like to thank Harun Poljo, our supervisor at Scania CV AB, for
his patience and guidance throughout the thesis work. We would also like to thank Magnus
Hultén, our manager at Scania CV AB, for ensuring that we had all the necessary resources on
time and also making sure that the working environment was always comfortable.
Additionally, we would like to thank Mattias Strindlund and Stig Hildahl at Scania CV AB for
their support and guidance to help us with setting the test rig and for being very accommodating,
despite their tight schedules.
Furthermore, we would like to thank Brad Holcomb at Gamma Technologies, Inc for helping
us troubleshoot the problems encountered on GT-Suite as quickly as possible throughout the
thesis, despite different time zones.
Lastly, we would like to express our gratitude to the entire NMBW team for providing us with
a friendly and productive work atmosphere, as this thesis would not have been completed
without their inputs and support.
A special thanks goes to Justin Chiu, our supervisor and examiner at KTH, for his active interest
throughout the thesis.

Team Charter
The initial research of the topic was done by both the team members under the guidance of our Scania
supervisor Harun Poljo. The keywords of the research included 1D filling simulations, GT-Suite, Air
traps/bubbles. Following this, based on our competencies, the work was divided among the authors.
Since Xavier had a background in industrial engineering and experience in design and modelling, he
was responsible for the thesis sections requiring work on CATIA. With Kapil’s background in heat
transfer, thermodynamics, and CAE, he was responsible for simulating the modelled test rig on GT-
suite. Furthermore, the testing at Scania’s BEV cooling test rig was done together. Since the results of
simulations were dependent on each other’s work, the hypothesis was brainstormed together.
Both authors shared the responsibility of writing the report. Individual contributions of writing the report
are summed up in the following table:
Section Topic Author
1 Introduction Kapil Vaidya
2.1 Trucking Industry Xavier Navarro Palau
2.2 Introduction to Cooling Systems Xavier Navarro Palau & Kapil Vaidya
2.3 Main Components of a Cooling
System
Kapil Vaidya
2.4 ICE Trucks Xavier Navarro Palau
2.5 BEV Trucks Xavier Navarro Palau
2.6 Unique Components of the LT
Circuit
Xavier Navarro Palau
2.7 Air Traps Kapil Vaidya
2.8 Computational Fluid Dynamics
(CFD)
Kapil Vaidya
3.1 Auxiliary Test Rig Xavier Navarro Palau
3.2 Scania Test Rig Xavier Navarro Palau
3.3 GT-Suite Modelling Kapil Vaidya
4.1 Filling times Xavier Navarro Palau
4.2 Air traps Kapil Vaidya
5 Discussions Xavier Navarro Palau & Kapil Vaidya
6 Conclusion Xavier Navarro Palau & Kapil Vaidya
7 Future work Xavier Navarro Palau & Kapil Vaidya

i
Table of Contents
1 Introduction ...................................................................................................................... 1
1.1 Background ................................................................................................................. 1
1.2 Problem Definition ...................................................................................................... 1
1.3 Research Question ....................................................................................................... 2
1.4 Scope and Delimitations.............................................................................................. 2
1.5 Thesis Outline ............................................................................................................. 3
2 Literature Study and Theory .......................................................................................... 4
2.1 Trucking Industry ........................................................................................................ 4
2.2 Introduction to Cooling Systems ................................................................................. 5
2.2.1 Heat Transfer ....................................................................................................... 5
2.2.2 Types of Cooling Systems ................................................................................... 8
2.3 Main Components of a Cooling System ..................................................................... 9
2.4 ICE Trucks ................................................................................................................ 10
2.5 BEV Trucks ............................................................................................................... 11
2.6 Unique Components of the LT Circuit ...................................................................... 13
2.6.1 Battery Thermal Issues ...................................................................................... 14
2.7 Air Traps ................................................................................................................... 14
2.7.1 Two-phase fluid flow ......................................................................................... 15
2.8 Computational Fluid Dynamics (CFD) ..................................................................... 19
2.8.1 1D vs 3D CFD Simulations ............................................................................... 19
2.8.2 Equations Governing GT-Suite.......................................................................... 19
2.8.3 Discretisation in GT-Suite ................................................................................. 21
2.8.4 Pressure Drops ................................................................................................... 21
2.8.5 Flow connections ............................................................................................... 23
3 Methodology ................................................................................................................... 24
3.1 Auxiliary Test Rig ..................................................................................................... 24
3.1.1 Case Definitions ................................................................................................. 24
3.1.2 Experimental Setup ............................................................................................ 25
3.1.3 CAD Modelling ................................................................................................. 26
3.2 Scania Test Rig.......................................................................................................... 27
3.2.1 Case Definitions ................................................................................................. 27

ii
3.2.2 Experimental Setup ............................................................................................ 30
3.2.3 CAD Modelling ................................................................................................. 32
3.3 GT-Suite Modelling .................................................................................................. 34
3.3.1 Assumptions ....................................................................................................... 39
3.3.2 Components ....................................................................................................... 40
4 Results and Analysis ...................................................................................................... 44
4.1 Filling times............................................................................................................... 44
4.2 Air traps ..................................................................................................................... 47
4.2.1 Auxiliary Test Rig.............................................................................................. 47
4.2.2 Scania Test Rig .................................................................................................. 49
5 Discussions ...................................................................................................................... 59
5.1 Filling Times & Air Traps ......................................................................................... 59
5.1.1 Case 1 and 2 ....................................................................................................... 59
5.1.2 Case 3 and 4 ....................................................................................................... 59
5.1.3 Case 5 (Effects of airlocks moving through a water pump) .............................. 60
5.2 Limitations ................................................................................................................ 60
6 Conclusion ...................................................................................................................... 62
6.1 Research Question 1 .................................................................................................. 62
6.2 Research Question 2 .................................................................................................. 62
6.3 Research Question 3 .................................................................................................. 63
6.4 Research Contribution ............................................................................................... 63
7 Future work .................................................................................................................... 66
References ............................................................................................................................... 68
iii
List of Figures
Figure 2.1 Projected costs ICE truck vs BEC truck (Transport & Environment, 2017) ............ 5
Figure 2.2 ICE Cooling System (Based on ( (Lajunen, et al., 2018)) ...................................... 11
Figure 2.3 BEV Cooling System (Based on (Lajunen, et al., 2018)) ...................................... 12
Figure 2.4 Comparison ICE with BEV HT circuit .................................................................. 12
Figure 2.6 Sketches of flow regimes for two-phase flow in a vertical tube (Cheremisinoff &
Gupta, 1983) ............................................................................................................................ 17
Figure 2.7 Sketches of flow regimes for two-phase flow in a horizontal pipe (Cheremisinoff &
Gupta, 1983) ............................................................................................................................ 18
Figure 2.8 Discretisation in GT-Suite ...................................................................................... 21
Figure 3.1 Auxiliary Test Rig Scheme .................................................................................... 24
Figure 3.2 Horizontal Case Circuit .......................................................................................... 25
Figure 3.3 Vertical Case Circuit .............................................................................................. 25
Figure 3.4 Horizontal Case CAD Model ................................................................................. 26
Figure 3.5 Vertical Case CAD Model...................................................................................... 26
Figure 3.6 Straight Volumes for Horizontal Case ................................................................... 26
Figure 3.7 Hose in Vertical Case ............................................................................................. 27
Figure 3.8 Cases 1 and 2 Scheme ............................................................................................ 28
Figure 3.9 Cases 3 and 4 Scheme ............................................................................................ 29
Figure 3.10 Case 5 Scheme ...................................................................................................... 30
Figure 3.11 Cooling Inlet ......................................................................................................... 32
Figure 3.12 Cooling plate CAD Model (based on Appendix 1) .............................................. 32
Figure 3.13 Expansion Tank CAD Model ............................................................................... 33
Figure 3.14 GT-Suite Modelling Process ................................................................................ 34
Figure 3.15 An example of GT-SpaceClaim Model ............................................................... 35
Figure 3.16 An example of a GEM3D Model ......................................................................... 36
Figure 3.17 An example of a GT-ISE Model .......................................................................... 37
Figure 3.18 An example of a GT-POST View ........................................................................ 38
Figure 3.19 Two inlets in GT-ISE Model ................................................................................ 39
Figure 3.20 Coolant Pump ....................................................................................................... 40
Figure 3.21 Deaeration Split .................................................................................................... 40
Figure 3.22 Expansion Tank .................................................................................................... 40
Figure 3.23 T-Joint................................................................................................................... 41
Figure 3.24 End-Flow Claps .................................................................................................... 41
iv
Figure 3.25 Flowmeter in GT-ISE ........................................................................................... 41
Figure 3.26 Flowrate Measurement in GT-ISE ....................................................................... 42
Figure 3.27 Battery Cooling Plate in GT-ISE .......................................................................... 42
Figure 4.1 Experimental and Simulation Filling Times Corelation ......................................... 45
Figure 4.2 Experimental and Simulation Filling Times Corelation for Cases 1 and 2 ............ 45
Figure 4.3 Experimental and Simulation Filling Times Corelation for Cases 3 and 4 ............ 46
Figure 4.4 Volume of Coolant in Expansion Tank in Case 2, Test Run 1 ............................... 46
Figure 4.5 Volume of Coolant in Expansion Tank in Case 4, Test Run 1 ............................... 47
Figure 4.6 Horizontal Case Air Traps ...................................................................................... 48
Figure 4.7 Horizontal Case Simulation Results ....................................................................... 48
Figure 4.8 Vertical Case Air Trap............................................................................................ 48
Figure 4.9 Vertical Case Simulation Results ........................................................................... 48
Figure 4.10 Case 1, Test Run 1 Simulation Results ................................................................ 49
Figure 4.11 Case 1, Test Run 2 Simulation Results ................................................................ 49
Figure 4.12 Case 1, Test Run 3 Air Trap ................................................................................. 49
Figure 4.13 Case 1, Test Run 3 Simulation Results ................................................................ 50
Figure 4.14 Case 2, Test Run 1 Simulation Results ................................................................ 51
Figure 4.15 Case 2, Test Run 2 Simulation Results ................................................................ 52
Figure 4.16 Case 3, Test Run 1 Simulation Results ................................................................ 53
Figure 4.17 Case 3, Test Run 2 Simulation Results ................................................................ 53
Figure 4.18 Case 3, Test Run 3 Simulation Results ................................................................ 54
Figure 4.19 Case 4, Test Run 1 Simulation Results ................................................................ 55
Figure 4.20 Case 4, Test Run 2 Simulation Results ................................................................ 55
Figure 4.21 Case 4, Test Run 2 Pressures ................................................................................ 56
Figure 4.22 Case 4, Test Run 3 Simulation Results ................................................................ 57
Figure 4.23 Drop in the height of coolant level in the Expansion tank at Case 5 (13 L/min) . 58

v
List of Tables
Table 2.1 Table of basic flow patterns in vertical tubes .......................................................... 17
Table 2.2 Table of basic flow patterns in horizontal tubes. ..................................................... 18
Table 3.1 Total Volume in Auxiliary Test Rig ........................................................................ 27
Table 3.2 Flowrate readings ..................................................................................................... 31
Table 3.3 Main Component Volumes ...................................................................................... 33
Table 3.4 Total Volume in Scania Test Rig ............................................................................. 33
Table 3.5 Simulation Run Setup .............................................................................................. 37
Table 4.1 Filling Times for Scania Test Rig ............................................................................ 44
Table 4.2 Types of Flow in Case 1 .......................................................................................... 50
Table 4.3 Coolant Volume Measured in the Cooling Plates for Case 2, Test Run 1 ............... 51
Table 4.4 Types of Flow in Case 2 .......................................................................................... 52
Table 4.5 Types of Flow in Case 3 .......................................................................................... 54
Table 4.6 Coolant Volume Measured in the Cooling Plates for Case 4, Test Run 1 ............... 56
Table 4.7 Types of Flow in Case 4 .......................................................................................... 57

vi
Nomenclature
m: Boundary mass flux into volume, m = ρAu
m: Mass of volume
V: Volume
p: Pressure
ρ: Density
A: Cross-sectional flow area
h: Convective heat transfer coefficient
As: Surface area of convective heat transfer
Dh: Hydraulic diameter of the flow channel T∞: Ambient Temperature Ts: Surface Temperature
Abbreviation
AC: Air Conditioning
BEV: Battery Electric Vehicle
CAE: Computer-Aided Engineering
CFD: Computational Fluid Dynamics
GT-Suite: Gamma Technologies Suite
DoE: Design of Experiments
DC: Direct Current
HT: High Temperature
ICE: Internal Combustion Engine
LT: Low Temperature
MT: Medium Temperature
NPSH: Net Positive Suction Head
SEI: Solid Electrolyte Interphase

1
1 Introduction
1.1 Background
With rising temperatures across the world, global warming has become a severe threat and
poses various challenges to humankind. Automotive manufacturers have rapidly decided to
move from conventional fossil fuel-based vehicles to electric mobility to mitigate the damage.
In addition to this, more than 100 countries across the world have pledged to be carbon neutral
by 2050 and have laid down emphasis on reducing the reliance on fossil fuels in their political
framework (International Transport Forum, 2017). This will not only help in more efficient
energy transformation but, at the same time, also reduce CO2 emissions and lower emissions
from the transport sector. The ongoing research in this field is promising. New, more powerful
recharging batteries coupled with increased volatility of the oil markets will soon lead to
freedom from fossil fuel-based transportation. (Peters, et al., 2012)
This shift towards clean and sustainable mobility poses unique challenges for automotive
manufacturers as there needs to be a complete overhaul of technologies and components. A
battery pack is an essential component for the Battery Electric Vehicle (BEV) as it stores the
energy used by the vehicle. The electric motor is analogous to an engine in an Internal
Combustion Engine (ICE) vehicle. Therefore, to run this electric motor, a battery is
needed. During the vehicle's operation, the battery's temperature increases significantly,
resulting in reduced efficiency and power output. This reduced efficiency and power output is
also observed when the ambient temperature is lower than 15 degrees. In such circumstances,
the cooling system heats the batteries using the heater. Hence, a cooling system is necessary
to maintain the power output and maximise thermal management.
1.2 Problem Definition
The transition to sustainable transportation is happening at a rapid pace, and new technological
solutions are being continuously introduced to meet the future requirements for BEV trucks.
This constantly changes the requirements of the BEV and requires a continuous redesign of the
cooling system. The cooling system must be validated before it can be introduced to the
customer, and the most common method used by Scania are testing in the test rigs, 3D
Computational Fluid Dynamics (CFD) simulations or tests in prototype vehicles. These
methods are very costly, time-consuming or both. The test in test rigs require components that
can have long lead times, are difficult to change and are expensive. The prototype vehicles
have even longer lead times and are difficult to adjust at a later stage since they are dependent
on the entire vehicle.
3D CFD filling simulation on software like STARCCM+ takes a lot of time, and the simulation
cannot keep up with the current pace of design at Scania due to the time longer taken to
simulate. GT-Suite is a 1D CFD simulation software that could be a promising option since the
simulations are necessary and 1D simulations save time and resources.
2
1.3 Research Question
This thesis aims to answer the following question- “How does the 1D simulations of filling a
cooling system in Gamma Technologies Suite (GT-Suite) equal filling a cooling system in a
test rig?” for the following parameters:
• Coolant filling time
• Location of ait traps in the circuit
• The total volume of the circuit
To further specify the research question, a set of sub-questions are derived as follows:
1. What limitations could unique BEV components impose on 1D simulations?
2. How to remove the air trapped in the circuit?
1.4 Scope and Delimitations
• The focus of the thesis work is limited to the investigation of air traps and assessment of
filling simulation of coolant in the cooling circuit for battery BEV trucks. An important
assumption is that all the pipes used to model the cooling system were adiabatic pipes,
which is not always the case in real-world scenarios. This assumption simplifies the
simulation process.
• The thesis work focuses explicitly on 1D CFD for flow and pressure drop through
components during filling. This technique is typically used for complex structures to gain
precise knowledge about fluid flow and fluid properties and, in most cases, dealing with
cooling systems with several parts such as valves, pumps, and expansion tanks. A detailed
3D CFD simulation has been done for some parts within Scania, which is more accurate
but utilises higher computational time and cost.
• Model only the Low Temperature (LT) battery cooling circuit – The High Temperature
(HT) and Medium Temperature (MT) circuits that include air conditioning, cabin, power
electronics and the electric motor was overlooked.
• Due to a lack of detailed information, much more general and simple conditions will be
imposed on specific components.
• Uncertainties of measuring devices cannot be controlled. However, a general optimistic
value was used.
• An attempt to validate the results was made with a simplified test rig as there was no data
available previously at Scania, which focused on the LT circuit of the cooling system of
the BEV truck.

3
1.5 Thesis Outline
This thesis work has the following steps:
1. Plan the experimental tests and prepare two different circuits – An auxiliary circuit to
learn GT-Suite and a Scania test rig circuit
2. Perform experiments at both the test rigs to obtain and interpret the data.
3. Setup 1D simulations for the auxiliary circuit
4. Compare the results from 1D simulations to the physical tests performed at the rig.
5. Upon complete investigation, move on to the Scania test rig circuit and set up a 1D
simulation for it.
6. Investigate the results from the simulations and validate with the results obtained from
the Scania test rig.
7. Compile results from the study and suggest changes, improvements and drawbacks of
the study performed.

4
2 Literature Study and Theory This chapter introduces the objective and aims to provide a detailed background of the research
being done through this thesis work. The reader gets a comprehensive knowledge of GT-Suite
simulation's theory and introduces different equations used to calculate fluid properties. In
addition to this, it also gives an insight into the behaviour of fluids in closed volume.
2.1 Trucking Industry
The road freight network serves as an artery for the world economy. Therefore, it is closely
related to globalisation and economic growth within nations – as the country's economy grows,
so does the level of infrastructure and demand for commodities, both of which raise the demand
for freight. Historically, there has been a strong statistical relation between the Gross Domestic
Product (GDP) growth and the increase of the transport sector (International Transport Forum,
2017). Consequently, the road freight market has gained more importance, contributing to 18%
of total world oil consumption in 2015 and around one-third of global final energy demand of
transportation (Mulholland, et al., 2018).
For example, a significant amount of trucks, 92% in the United States (Burak, et al., 2017), run
on fossil fuels, producing CO2 emissions. Freight transport represents approximately slightly
below half of the transport emissions; however, the contribution is expected to rise dramatically
as emissions from road freight transport are projected to increase by 56% – 70% between 2015
and 2050 (International Transport Forum, 2017).
Emissions are expected to rise despite significant improvements in energy efficiency due to
expected significant growth in demand. Therefore, there is an increasing need for electrification
of transport, particularly heavy-duty road transportation. By getting higher levels of electric
trucks (around 95 %), it is possible to reduce CO2 emissions up to 90% (Liimatainen, et al.,
2019)
Some financial experts predict that electric trucks would be significantly cheaper to operate
than diesel trucks with an equal payload (Transport & Environment, 2017). The battery cost is
the main factor, which the International Council on Clean Transportation predicts that a battery
pack will cost around 100 $ per kW by 2030 (Wolfram & Lutsey, 2016). Figure 2.1 shows the
projected costs by 2025 of an ICE truck and a BEV truck with a battery capable of running 400
km.

5
Figure 2.1 Projected costs ICE truck vs BEC truck (Transport & Environment, 2017)
To reduce the vehicle maintenance cost and to maximise the vehicle’s longevity, a cooling
system is needed to heat or cool the components during its operation (Chastain, 2006).
The following sections introduce the theory behind heat transfer which is essential to
understand the different cooling systems. Furthermore, the technical differences between ICE
and BEV trucks concerning cooling are also explained.
2.2 Introduction to Cooling Systems
The primary role of the cooling system is to remove the heat from the components actively
exposed to high temperatures, thus avoiding local overheating. At the same time, it is
responsible for ensuring the optimum working temperature of the internal combustion engine
and multiple components within battery electric vehicles, which is essential to achieve the best
possible thermal efficiency (Śliwiński & Szramowiat, 2018). Section 2.2.1 introduces essential
types of heat transfer that help to understand the working of cooling systems.
2.2.1 Heat Transfer The transfer of thermal energy in the form of heat between physical systems is referred to as
heat transfer. Heat transfer always takes place from a higher temperature system to a lower
temperature system, and the heat transfer rate is determined by the difference in temperature
between the components and the medium across which the heat is transferred. Heat transfer is
divided into three basic modes:
Radiation
The energy produced by electromagnetic waves resulting from changes in the electromagnetic
structure of the atoms is referred to as radiation. As opposed to other modes of heat transfer,
radiation does not involve the use of a medium (Cengel, 2011). This type of heat transfer is
observed around the radiator of a vehicle. The Stefan-Boltzmann law defines the permissible
rate of radiation that can be emitted from a surface at absolute temperature. It is expressed by
the following equation:
��𝑚𝑎𝑥 = 𝜎𝐴𝑠𝑇𝑠4
Equation 1

6
A blackbody is an ideal surface that emits radiation equivalent to Stefan-Boltzmann constant
value (σ). The ratio between the actual and a blackbody is termed as the emissivity (ε).
Emissivity ranges between 0 and 1, and radiation emitted by real surfaces can be expressed by
�� = 𝜀 𝜎𝐴𝑠𝑇𝑠4
Equation 2
Where, σ= 5.67*10-8 W/m2K is the value of Stefan-Boltzmann’s constant
As is the surface area of radiative heat transfer
Ts is the absolute temperature of the object in kelvin (K)
Conduction
Conduction is the movement of energy from more energetic particles to neighboring less
energetic particles as a consequence of particle interaction caused by a temperature gradient.
The heat conduction process is influenced by the following factors: temperature gradient,
material cross-section, travel path length, and physical material characteristics. The
temperature gradient is a physical parameter that specifies the rate and direction of heat
transfer. Temperature flow will always be from hottest to coldest or from higher to lower
kinetic energy. Thermal transmission stops when the two temperature differences attain an
equilibrium state. The following equation is a one-dimensional representation of Fourier's law
of heat conduction.
��𝑐𝑜𝑛𝑑 = −𝑘𝐴𝑑𝑇
𝑑𝑥
Equation 3
Where: k is the thermal conductivity, [W/mK]
Silver, for example, has high thermal conductivity, whereas rubber is an insulator and has a
poor thermal conductivity (Teboho, et al., 2018)
Convection
Convection is a type of heat transfer in which energy is transferred between a solid surface and
a gas or a liquid. It incorporates both conduction and fluid motion effects. The velocity of the
fluid flow is directly proportional to the rate of convective heat transfer.
Convective heat transfer occurs in the cooling system when there is a temperature difference
between the wall surface temperature and the temperature of the coolant, for example, in the
cooling pipes. In this instance, the fluid creates a thermal boundary layer where convection
occurs. Fluid velocity is low at the pipe surface, and diffusion takes over. When travelling away
from the surface, bulk motion becomes more significant.
Newtons Law of Cooling is used to express convective heat transfer, and the heat transfer is
directly proportional to the temperature difference. This process is described in the form of the
equation shown below.
��𝑐𝑜𝑛𝑣 = ℎ𝐴𝑠(𝑇𝑠 − 𝑇∞)
Equation 4

7
Where: h is convective heat transfer coefficient, [W/m2]
As is surface area of convective heat transfer
T∞ is the ambient temperature Ts is the surface temperature
There are primarily two types of convection, natural and forced. Forced convection occurs
when fluid is forcibly moved over surfaces by external forces such as a pump, fan, or wind,
while natural convection occurs when fluid motion is induced by density difference due to
temperature variation, which causes buoyancy forces.
Heat transfer across pipes and heat exchangers is a typical occurrence in cooling systems. In
order to effectively find the rate of heat transfer, the heat transfer coefficient is measured. This
heat transfer coefficient is primarily determined using non-dimensional numbers such as
Prandtl (Pr), Nusselt (Nu), and Reynolds (Re) (Astakhov & Joksch, 2012).
The Prandtl number is a dimensionless quantity that correlates a fluid's viscosity with thermal
conductivity. It is an intrinsic property of a fluid that evaluates the relationship between a fluid's
momentum transfer (viscous diffusion rate) and thermal transport capacity (thermal diffusion
rate) (Rapp, 2017). The following equation can express it.
𝑃𝑟 =𝜇𝐶𝑝
𝑘
Equation 5
Where: Cp is the specific heat, [J/kg.K]
k is thermal diffusivity, [W/m.K]
μ is dynamic viscosity, [N.s/m2]
Reynolds number determines whether the flow is turbulent or laminar. It is the ratio of the
internal forces to the kinematic viscous forces and is expressed as the following.
𝑅𝑒 =𝑉𝐷ℎ
𝑣
Equation 6
Where: Dh is the hydraulic diameter of the flow channel
ν is kinematic viscosity (m2/s); ν = μ / ρ.
V is the flow velocity
A Reynolds number greater than 4000 indicates that the flow is turbulent, and less than 2300
indicates that the flow is laminar. Laminar flow occurs in pipes with smaller diameters, lengths
and at low flow rates, and turbulent flow is the opposite. The flow is a mixture of laminar, near
the edges and turbulent, in the centre of the pipe between a Reynolds number of 2300 and 4000.
This gradual change is termed as transitional flow.
8
2.2.2 Types of Cooling Systems Engine cooling systems are classified into two categories, air cooling systems and liquid
cooling systems. Air cooling systems were only used in older vehicles and except for some
modern motorcycles. Instead, nowadays, the liquid cooling system plays an essential role in
the automotive industry (Lin & Sundén, 2010).
Air-Cooling Systems
Air cooling systems are commonly used in motorcycle engines and aircraft engines. In these
systems, the heat created by the combustion in the engine cylinders is dissipated by air.
This type of cooling systems has a few advantages in comparison to the liquid cooling system
(Prudhvi, et al., 2013):
• The system is lighter since it does not have a radiator and pump.
• There are no leakages in the air-cooling system.
• It can be used at cold temperatures without the need for antifreeze.
However, the air-cooling systems have some disadvantages (Prudhvi, et al., 2013):
• It is less efficient than a liquid cooling system.
• The engine needs to be exposed directly to the air, as in motorcycles and aircraft.
Liquid Cooling Systems
In the liquid cooling systems, the coolant is usually a mixture of water and ethylene glycol.
The coolant absorbs the heat from the engine and is cooled in the radiator. After this, the coolant
is recirculated to the engine.
Sometimes, oil is also used in liquid cooling systems, especially in the engine and electric
motor. Oil, apart from cooling, also serves the following functions (Palmgren & Hjälm
Wallborg, 2015):
• It lubricates and protects components from corrosion.
• It cleans surfaces and transports pollution particles to the oil filter.
There are two types of liquid cooling system (Lin & Sundén, 2010):
Thermo Siphon System
The circulation of liquid in this system is done by a change in density produced by the
difference in temperatures. As a result, no pump is needed, and the coolant is circulated solely
due to density differences.
Pump Circulation System
In this type, a pump is used to circulate the coolant as was described in Convection in section
2.2.1.
The advantages of liquid cooling systems are (Prudhvi, et al., 2013):
• It dissipates the heat from the engine in a uniform way.
• The engine fuel consumption is improved by using this system.
• Using a liquid cooling system provides more freedom regarding the position of the
engine inside the vehicle.

9
• The liquid absorbs the noise; as a consequence, the engine is less noisy than air-cooled
engines.
On the other hand, the liquid cooling systems also have some disadvantages (Prudhvi, et al.,
2013):
• The quantity of coolant inside the system affects the efficiency of the cooling system.
• The pump consumes a considerable amount of power.
• If the system fails, the engine may suffer severe damage.
• The complexity and the cost of the liquid cooling system are more significant than in
the air-cooling system. Additionally, it requires further maintenance and care for the
components.
In this thesis, the circuit studied is based on a liquid cooling pump circulation system.
2.3 Main Components of a Cooling System
In this section, the main components of a cooling system are explained.
Pipes and Hoses
Pipes and hoses are used to link the various parts of a coolant system together and transport the
coolant mixture between these components. Hence, they should be designed in such a manner
as to be able to endure elevated pressures and temperatures which may exist in the coolant
system.
Hoses must be durable enough at lower ambient temperatures and should also endure sudden
vibrations in the cooling circuit. Furthermore, the pipes and hoses within the circuit should
have an appropriate radius not to allow unwanted pressure losses.
Expansion Tank
Usually, the expansion tank is positioned at the top of the cooling system containing air and
coolant.
The Expansion Tank or Accumulator serves several functions:
• It can be used to fill the coolant in the circuit.
• It provides an additional amount of coolant, which appears when the coolant
temperature rises and helps to retain a specific pressure in the system. If the pressure
exceeds the desired level, a pressure valve opens, letting out some air.
• It also acts as a deaeration device by providing a small flow to direct the air pockets out
of the system, thereby reducing the air in the circuit. This significantly improves the
cooling efficiency of the system.
Pump
The pump is used to drive the coolant through the cooling system. When the coolant passes
through multiple components in the system, the velocity changes due to the pressure losses.
The pump overcomes these pressure losses caused by different components. The electric pumps
are used in the BEV cooling system to maintain an adequately pressurised flow of coolant at
every operational speed. An advantage of using an electric pump is that the coolant flow can

10
be stopped entirely when not needed and offers a higher control precision., unlike mechanical,
where the pump speed depends on the engine speed.
Pump Cavitation
A phenomenon called cavitation occurs when air traps are formed on the suction side of the
pump, causing damage to the pump and rotor blades. Air pockets are mainly caused due
to insufficient Net Positive Suction Head (NPSH). or inadequate priming. Cavitation can
severely reduce the life of a pump, and the collapsing vapour bubbles inside the pump causes
the following problems (Xylem Applied Water Systems, 2015):
• It decreases the pumping capacity.
• Due to the decreased pumping capacity, the pump may not keep up with the incoming
flow, causing overflows.
• It causes excessive vibrations that may damage the rotating elements. For example, the
impeller collides with non-rotating elements, like the wear ring or plates, and can cause
bearing and seals to break before their expected end of life.
• Cavitation can also cause wetted components to be damaged due to contact with
imploding vapour bubbles. The energy generated when the vapour bubbles collapse
causes bits of metal to break off and collide with other moving parts.
Radiator
To dissipate heat efficiently, two radiators, one each for HT and LT circuits, are used. The
radiator for the HT circuit is larger due to higher temperatures within the circuit. A radiator is
a plate heat exchanger that uses metal plates to transfer heat between two fluids. This type of
heat exchanger offers a substantial advantage over the traditional heat exchanger in that the
fluids are subjected to a much greater surface area, so the fluids are dispersed across the plates.
This promotes heat transfer and significantly increases the rate of temperature change (Kakaç,
et al., 2002).
Radiator Fan
A fan is a critical part of the cooling system as it allows air to move through the core of the
radiator constantly. The air is driven into the radiator due to ram air when the vehicle is moving
at high speeds, and the fan supplies additional air flow, causing heat from the engine to
dissipate, cooling the fluid and, as a result, the battery, power electronics and the electric motor.
Electric fans used in the BEV trucks work with a sensor and engage according to the
temperature of the circuit, independent of the drive shaft.
2.4 ICE Trucks
The ICE trucks are powered by a heat engine in which fuel, usually gasoline or diesel, is used
for combustion. During combustion, the engine produces a lot of heat, and a cooling system is
needed. These systems typically feature a radiator, a radiator fan, a coolant pump, and a
thermostat valve, as shown in Figure 2.2, that dissipates the engine's waste heat through the
coolant fluid. The valve is a balancing device that ensures that the engine coolant temperature
stays within the specified range. The coolant fluid is typically a mixture of water and ethylene-
glycol that stays below its boiling point over the engine's entire operating range, including its
maximum heat load (Chastain, 2006).

11
Figure 2.2 ICE Cooling System (Based on ( (Lajunen, et al., 2018))
2.5 BEV Trucks
BEV trucks utilise electric motors and batteries instead of combustion and fuel to produce
power required to drive the vehicle. The battery is the most critical and complex part of an EV
(X-Engineer, 2021). Therefore, significant R&D costs are incurred during the development
of technical solutions which are capable of maintaining the optimum temperature of the
batteries.
Since the battery's working temperatures are different from the rest of the components, the
cooling system is generally formed by two different loops: the LT loop, including the battery
and the HT, including the electric motor, inverter, and power electronics in Figure 2.3.
12
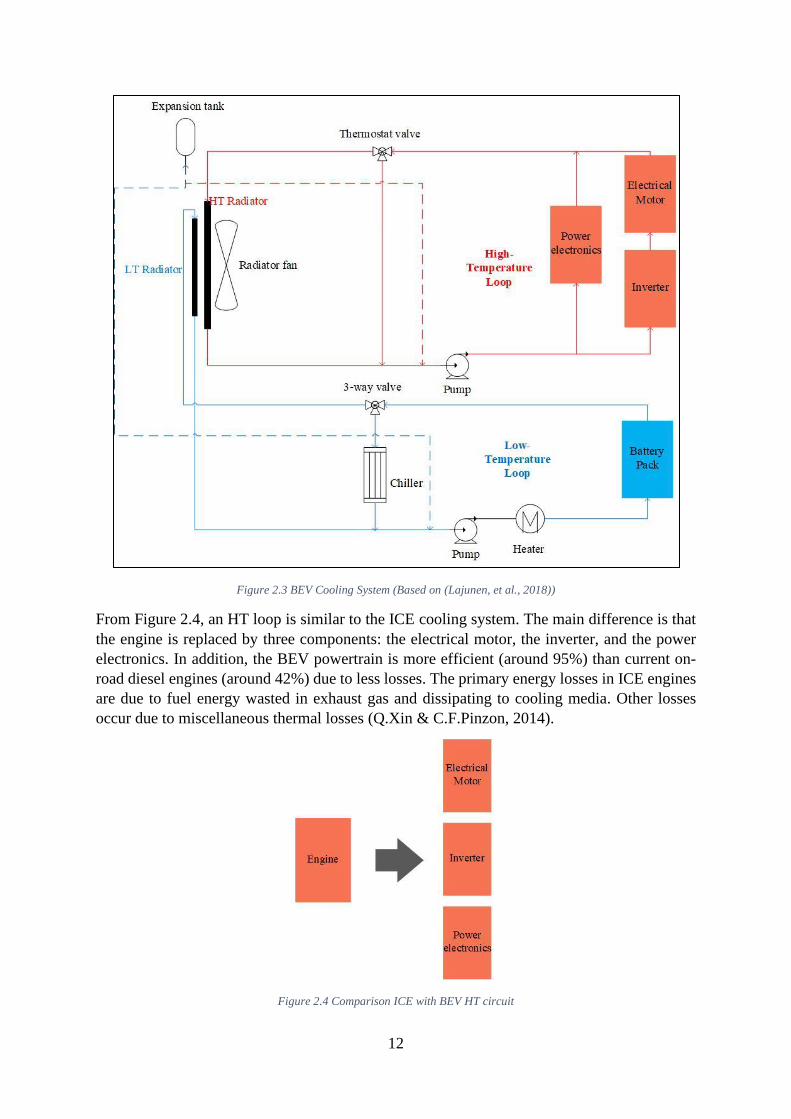
Figure 2.3 BEV Cooling System (Based on (Lajunen, et al., 2018))
From Figure 2.4, an HT loop is similar to the ICE cooling system. The main difference is that
the engine is replaced by three components: the electrical motor, the inverter, and the power
electronics. In addition, the BEV powertrain is more efficient (around 95%) than current on-
road diesel engines (around 42%) due to less losses. The primary energy losses in ICE engines
are due to fuel energy wasted in exhaust gas and dissipating to cooling media. Other losses
occur due to miscellaneous thermal losses (Q.Xin & C.F.Pinzon, 2014).
Figure 2.4 Comparison ICE with BEV HT circuit

13
As the thesis focuses on cooling the battery pack, the focal point of the following sections will
be the LT loop and its unique components.
2.6 Unique Components of the LT Circuit
The LT circuit contains the components explained in section 0, and some unique components
explained below.
Battery
A battery provides electrical energy to drive the motors, components, and other power
electronics within the vehicle. A battery pack found in vehicles consists of multiple cells
arranged in various configurations, like series, parallel or a combination of both. Currently,
Lithium-ion batteries are preferred due to their high charge density, longevity, and quicker
recharging capabilities (Miao, et al., 2019).
A battery pack in an EV is generally the most expensive component and could incur a huge
cost if it needs to be replaced prematurely. This is especially important to BEV trucks as these
vehicles are designed to run for long hauls, and it is necessary to minimise the downtime for
maintenance as this could affect the supply chain (Stringer & Park, 2020).
Battery Cooling Plates
Appropriate temperature control significantly increases the efficiency and operational lifetime
of battery packs used in BEV vehicles. Therefore, it is essential to provide an effective thermal
management system to prevent diverting energy from primary vehicle functions (Jaewan, et
al., 2019). Cooling for a battery pack can be provided with cooling plates using several internal
channels through which the coolant can be pumped, which is then carried away by the coolant
to the chiller or the radiator depending on the temperature, where it cools down and is then
recirculated in the circuit (Jarrett & Kim, 2011).
3-way Valve
The 3-way valve functions as an alternative to a thermostat, which controls the direction of the
coolant flow depending on the temperature of the coolant. Its primary purpose is to guide the
coolant towards the radiator's inlet or entirely bypass the radiator. The 3-way valve offers
higher flexibility with several control variables to manage the flow of the coolant and is easier
to operate compared to a thermostat. In addition to this, these valves can also be used with the
chiller to maximize the cooling system's effectiveness and cool the batteries when needed.
Chiller – Heat exchanger
A chiller is essentially a plate heat exchanger that allows the coolant in the LT circuit to
exchange heat with the refrigerant in the air conditioning circuit. A chiller in the cooling circuit
enables the Air Conditioning (AC) system to cool the batteries when there is no demand for
cabin heating or in case of extreme loads on the batteries. When the radiator in the LT cannot
cool the batteries on its own, especially during elevated loads at normal temperature and
pressure, the chiller can support this function by enabling the AC circuit to cool the batteries
(Dinakar & Rajeeve, 2016).

14
Heater
In lower or sub-zero temperatures, it is important to heat the coolant to warm the battery.
Modern high voltage heaters that can simultaneously achieve cabin and battery heating are
designed for Direct Current (DC) input voltages between 250 V and 500 V or even up to 800
V to facilitate faster battery charging (BorgWarner, 2020).
2.6.1 Battery Thermal Issues
As a battery is crucial for BEV trucks, it is particularly important to maintain the condition of
the battery, including its temperature. Temperature uniformity is also essential to maintain the
balance between cells in series strings. Temperature variations in the pack cause nonuniform
cell breakdown, affecting cell balance and lowering pack efficiency. The optimum range to get
the best performance of the battery is between 15 °C and 35 °C (Lajunen, et al., 2018).
Otherwise, permanent damage will be caused to the batteries.
The current carrying capacity during discharging reduces as the operating temperature
decreases (Li & Zhu, 2014). The reduced discharge capacity reduces the energy supplied by
the battery (Hu, et al., 2020). Furthermore, the cell resistance rises, limiting the battery's power
output (Hu, et al., 2020). Charging the battery at high voltages and low temperatures is likely
to cause lithium plating, which often results in substantial battery capacity fade (Li & Zhu,
2014). Lithium plating is the deposition of metallic lithium on the surface of the anode of
lithium-ion batteries (Zimmerman & Quinzio, 2010). Therefore, the battery is typically charged
at low voltages at low temperatures to prevent lithium plating, thereby significantly increasing
charge durations (Hu, et al., 2020).
If the battery reaches temperatures above 50 °C, its lifetime and charging efficiency are reduced
(Sato, 2001). Additionally, at high temperatures, the heat dissipation increases, causing thermal
runaway. In thermal runaway, the temperature keeps rising unless heat is dissipated faster than
generated when it reaches a temperature around 80 °C (Gao, et al., 2019). Thermal runaway
comprises many steps, each of which causes more significant damage to the battery cells. At
80 °C, the Solid Electrolyte Interphase (SEI) surface dissolves into the electrolyte. After the
SEI layer is decomposed, the electrolyte starts to react with the anode. This is an exothermal
reaction, which raises the temperature. In the second step, the elevated temperature (around
110 °C) allows organic solvents to degrade, resulting in the emission of hydrocarbon gases.
The gas increases pressure within the cells, and the temperature rises above the flashpoint.
However, because of the lack of oxygen, the gas does not ignite. Then, at 135°C, the separator
melts and short-circuits between the anode and cathode. Finally, the metal-oxide cathode
degrades at 200 ºC and releases oxygen, causing the electrolyte and hydrocarbon gases to ignite
(Feng, et al., 2018).
2.7 Air Traps
During filling, the air is displaced by the coolant towards the highest point in the circuit, i.e.
towards the expansion tank and eventually exiting to the atmosphere. The coolant passes
through many components in a circuit on its way to the expansion tank, resulting in locations
where airlocks can potentially be formed. On a component level, a higher number of cooling
channels may lead to higher chances of the formation of air traps. Air traps, also known as

15
airlocks, are large air bubbles formed by the accumulated air in the circuit that cannot be
released into the atmosphere (OARDS Automotive Hub, 2020). As the air density is less than
the coolant, the air traps are commonly formed in the highest points of the system (Evans
Cooling Systems Australasia, 2016).
The complexity of the LT loop can produce air traps inside the cooling circuit. Each of the
components is placed at different points in 3D space and are connected by hoses. This means
that there could be elevation differences between components and changes in geometries that
may lead to air traps. The low levels of coolant in that section can create an air trap acting as
an insulator for heat convection and decrease the cooling circuit's efficiency, especially near
the components that need to be cooled or heated (Evans Cooling Systems Australasia, 2016)
which can restrict the coolant flow in that section of a pipe.
2.7.1 Two-phase fluid flow
The interactive flow of two distinct phases, say air and water, with common interfaces in, for
example, a pipe is referred to as two-phase flow. The fact that two-phase flows can take several
different shapes and forms is one of the most difficult aspects of dealing with it. It is important
to consider the spatial distribution and velocities of the two phases in the flow channel in many
engineering fields. In order to classify flow pattern, two fundamental parameters of flow should
be understood, which are (White, 2010):
1. Flow Quality – When two-phase fluid flow is considered, a dimensionless fraction
called flow quality is used to represent the air flow inside the total flow. The following
equation defines the flow quality.
𝑥 =��𝑎
��𝑣+��𝑎=
𝑣𝑎𝐴𝑎𝜌𝑎
𝑣𝑎𝐴𝑎𝜌𝑎+ 𝑣𝑙𝐴𝑙𝜌𝑙
Equation 7
In this equation, the subscripts "a" and "v" represent the air and liquid phase,
respectively.
2. Flow rate – Volumetric flow rate, "Q" can be defined as the volume of the fluid, "V"
that flows through a cross-sectional area, "A" per unit time. The following equation
makes it easier to understand.
𝑄 =𝑉
𝑡= 𝐴
𝑑
𝑡
Equation 8

16
Where: 𝑑
𝑡 is the length of the volume of the fluid divided by the time taken for the fluid to
flow through its length.
Therefore,
𝑄 = 𝐴𝑣
Equation 9
Where: v is the velocity of the fluid
Both the flow quality and the flow rate are dependent on the type of fluid and pressure.
This section briefly explains and categorises the simultaneous flow of liquid water and gas
flowing through a duct or a pipe according to the flow direction relative to the gravitational
acceleration, i.e., vertical, or horizontal tubes. An illustration of the flow pattern in vertical
tubes is shown in Figure 2.5.
a. Flow Pattern in Vertical Tubes
i. Bubbly flow
In this type of flow, the liquid flow rate is high and causes air to break into bubbles,
but the rate is not high enough for the bubbles to get evenly dispersed throughout
the liquid phase. This flow results in bubbles concentrated at the top half of the tube
due to the buoyancy effect.
ii. Slug flow
At higher air velocities, bubbles tend to agglomerate and slugs similar to the
dimension of the tube are observed. Since these big gas slugs are split from one
another by liquid slugs, they induce significant pressure and liquid flow rate
variations. However, in some cases, even if the net movement of fluid is upward, a
downward flow can be seen near the tube wall, which can be attributed to the effects
of gravitational force.
iii. Churn flow
Churn flow, also known as froth flow, is a particularly distorted two-phase fluid
flow. When the velocity of a slug flow increases, the flow structure becomes
unstable. The appearance of a very thick and turbulent liquid layer, with the liquid,
often alternating up and down, characterizes churn flow. It is one of the least
understood gas-liquid flow regimes due to its almost unstable properties.
iv. Annular flow
Annular flow is observed at higher air velocities in which the liquid forms a
continuous film around the wall of the tube, and the gas flows in a continuous phase
in the centre of the tube. In this type of flow, the flow core can contain dispersed
liquid droplets.
17
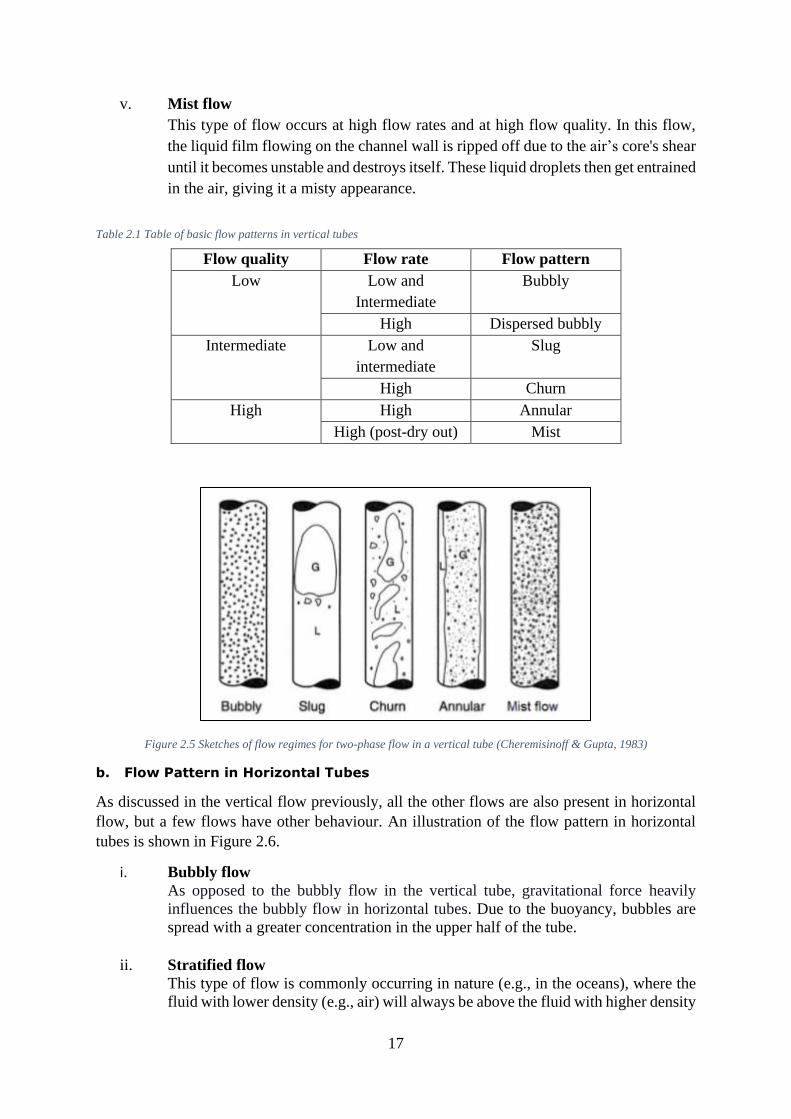
v. Mist flow
This type of flow occurs at high flow rates and at high flow quality. In this flow,
the liquid film flowing on the channel wall is ripped off due to the air’s core's shear
until it becomes unstable and destroys itself. These liquid droplets then get entrained
in the air, giving it a misty appearance.
Table 2.1 Table of basic flow patterns in vertical tubes
Figure 2.5 Sketches of flow regimes for two-phase flow in a vertical tube (Cheremisinoff & Gupta, 1983)
b. Flow Pattern in Horizontal Tubes
As discussed in the vertical flow previously, all the other flows are also present in horizontal
flow, but a few flows have other behaviour. An illustration of the flow pattern in horizontal
tubes is shown in Figure 2.6.
i. Bubbly flow As opposed to the bubbly flow in the vertical tube, gravitational force heavily
influences the bubbly flow in horizontal tubes. Due to the buoyancy, bubbles are
spread with a greater concentration in the upper half of the tube.
ii. Stratified flow
This type of flow is commonly occurring in nature (e.g., in the oceans), where the
fluid with lower density (e.g., air) will always be above the fluid with higher density
Flow quality Flow rate Flow pattern
Low Low and
Intermediate
Bubbly
High Dispersed bubbly
Intermediate Low and
intermediate
Slug
High Churn
High High Annular
High (post-dry out) Mist

18
(e.g., liquid water). If the air's velocity increases, the horizontal interface becomes
more disrupted, and waves can form. This flow regime is commonly referred to as
stratified-wavy flow.
iii. Plug or Slug flow1
When the velocity of the air is increased further, the flow could either be
characterized as plug flow, if the diameter of the bubbles is smaller than the tube or
slug flow, if the diameter of the bubbles formed is similar to that of the tube
Table 2.2 Table of basic flow patterns in horizontal tubes.
Figure 2.6 Sketches of flow regimes for two-phase flow in a horizontal pipe (Cheremisinoff & Gupta, 1983)
1 Plug flow model solver of GT-Suite is not the same as the plug flow of the two-phase fluid flow. In GT-Suite a
plug flow solver means that all the subvolumes are calculated sequentially for each element of the circuit.
Flow quality Flow rate Flow pattern
Low Low and
Intermediate
Bubbly
Low Stratified
Intermediate Stratified Wavy
Intermediate Low and
intermediate
Plug and Slug
High High Annular
High (post-dry out) Mist

19
2.8 Computational Fluid Dynamics (CFD)
Computational Fluid Dynamics is the method of calculating and simulating processes
involving heat transfer, fluid flow, and associated phenomena to solve a given problem using
various computational schemes and data structures. CFD equations are calculated by
discretising the domain into smaller sections called elements, which are then solved using
various numerical schemes. In general, this approach is used to produce results similar to those
provided by Computer-Aided Engineering (CAE) in structural mechanics. CFD is based on the
Navier-Stokes equations, which describes the behaviour of the majority of the single-phase
flows to solve the flow problems.
2.8.1 1D vs 3D CFD Simulations
a. 1D CFD Simulation
1D simulations attempt to improve system efficiency by assisting engineers in understanding
the interactions of the system's numerous components. There are a few steps involved in
developing a model for a system (Zhang, 2020):
1. Enter the required components and connect them.
2. Assign the appropriate physical models to the various components (for example,
simplified turbomachines/heat exchangers, pipes, flow resistance, pressure drops, etc.).
3. Enter the necessary physical model parameters
4. Run the simulation
Each component is simulated independently, with its own set of input and values. This
means that the model accurately depicts the system's performance since it considers the
interactions of the various components with one another.
b. 3D CFD Simulations
3D simulations depict the interaction of individual components with their environment,
whereas 1D simulations depict the overall design of a system and the interactions of its
components. As a result, a 1D simulation is ideal for improving the design of a complete
system, whereas a 3D simulation is ideal for finding the optimal design features of specific
components such as flow pattern around a blade or heat transfer with internal cooling air and
exterior hot gas. A 3D simulation may also be used to confirm the results of a 1D simulation,
such as pump cavitation prediction on an NPSH map (Zhang, 2020).
To cater to the requirements of this thesis, a software called GT-Suite, developed by Gamma
Technologies, was used for 1D CFD simulation. It is a commonly used tool among most major
vehicle manufacturers. This section explains the fluid flow in pipes through an internal network
calculated by GT-Suite.
2.8.2 Equations Governing GT-Suite
In GT-Suite, the solutions for the conservation equations of continuity, energy, and
momentum, also known as the Navier-Stokes equations, are calculated in one dimension (1D),
yielding results that are averaged around the direction of flow (Gamma Technologies, 2020).
These equations are:

20
Conservation of Continuity:
𝑑𝑚
𝑑𝑡= ∑ ��
𝑏𝑜𝑢𝑛𝑑𝑎𝑟𝑖𝑒𝑠
Equation 10
Conservation of Energy (Explicit Solver in GT-Suite):
𝑑(𝑚𝑒)
𝑑𝑡= −𝜌
𝑑𝑉
𝑑𝑡+ ∑ (��𝐻) − ℎ𝐴𝑠(𝑇𝑓𝑙𝑢𝑖𝑑 − 𝑇𝑤𝑎𝑙𝑙)
𝑏𝑜𝑢𝑛𝑑𝑎𝑟𝑖𝑒𝑠
Equation 11
Conservation of Enthalpy (Implicit Solver in GT-Suite):
𝑑(𝑝𝐻𝑉)
𝑑𝑡= 𝑉
𝑑𝑉
𝑑𝑡+ ∑ (��𝐻) − ℎ𝐴𝑠(𝑇𝑓𝑙𝑢𝑖𝑑 − 𝑇𝑤𝑎𝑙𝑙)
𝑏𝑜𝑢𝑛𝑑𝑎𝑟𝑖𝑒𝑠
Equation 12
Conservation of Momentum:
𝑑��
𝑑𝑡=
𝑑𝑝𝐴 + ∑ (𝑚𝐻) − 4𝐶𝑓𝑝𝑢|𝑢|
2
𝑑𝑥𝐴𝐷 − 𝐾𝑝(
12 𝑝𝑢|𝑢|)𝐴𝑏𝑜𝑢𝑛𝑑𝑎𝑟𝑖𝑒𝑠
𝑑𝑥
Equation 13
where:
m: Boundary mass flux into volume, m = ρAu
m: Mass of volume
V: Volume
p: Pressure
ρ: Density
A: Cross-sectional flow area
As: Heat transfer surface area
e: Internal energy + Kinetic energy per unit mass
H: Total specific enthalpy, H = e + p
ρ
h: Heat transfer coefficient
Tfluid: Fluid temperature
Twall: Wall temperature
u: Velocity at the boundary
Cf: Fanning friction factor
Kp: Pressure loss coefficient
D: Equivalent diameter
dx: Length of mass element in flow direction (discretization length)
dp: Pressure differential acting across dx
Time integration approaches are divided into two types (Gamma Technologies, 2020):

21
• Explicit: This type of integration is preferred when the wave dynamics are crucial, such
as engine air flows, acoustics and fuel injection systems. This method is not desirable
for simulations that run for longer than a minute as it focuses on accurate predictions
of pressure pulsations.
• Implicit: This type of integration is used in cooling systems, air conditioning and
lubrication when the Mach number is less than 0.3, and the wave dynamics are not an
essential parameter of consideration. This method is ideal for simulations that run in
the order of minutes.
2.8.3 Discretisation in GT-Suite
To accurately model the system, the system is discretised into several volumes called
computational cells where each flow split is represented by one volume and every pipe is
divided into single or more volumes. This type of discretization is known as a "staggered grid"
and a schematic shown in Figure 2.7. In this approach, the scalar variables like pressure,
temperature, density, enthalpy, internal energy are approximated to be uniform over each
volume. The vector variables such as rate of mass flow, velocity, etc., are calculated for each
cell boundary. The larger discretisation results in less accurate results, but the computational
time is significantly faster. Smaller discretisation results in higher accuracy but requires a much
longer computational time which increases exponentially as the discretisation is made finer.
Figure 2.7 Discretisation in GT-Suite
2.8.4 Pressure Drops
The difference in pressure between two points in a fluid-carrying network is referred to as
pressure drop. When frictional forces induced by the flow resistance act on a fluid as it passes
through the tube, a pressure drop occurs. The key determinants of fluid flow resistance are fluid
velocity through the pipe and fluid viscosity (Gamma Technologies, 2020).
Generally, pressure losses in pipes occur due to irregular cross-sections, bends, and tapers,
which can be accounted for by setting the pressure loss coefficient. GT-Suite handles the
pressure drops by adjusting three distinct parameters (Gamma Technologies, 2020):

22
Pressure Loss Coefficient
The pressure loss coefficient (Kp) is defined as:
𝐾𝑝 =𝑝1 − 𝑝2
12 𝜌𝑉1
2
Equation 14
Where: p2 is total pressure at inlet,
p1: Total pressure at outlet,
ρ: Inlet density and
V1=Inlet Velocity
By using the default option for pressure loss coefficient, an internal calculation of losses within
the cones and bends is performed by the software. This does not include the effects of wall
friction, which is calculated separately, as explained in the next section.
Friction losses
Flow losses within pipes caused by friction along the walls are automatically determined as a
function of Reynolds number and wall surface roughness using a Fanning friction factor.
The Moody Diagram, which represents the relationship between Reynolds number, wall
roughness, and the resulting friction factor, is mathematically determined by the implicit
Colebrook equation; however, for better solution speed, an explicit approximation of the
Colebrook equation is used (Cruz, et al., 2012). GT-Suite offers three options to have trade-
offs between speed and accuracy: simple, improved, and a third one that applies both the
improved friction and the bend loss model. The automatic choice selects one of the three for
all nodes and automatically selects the most appropriate method (Gamma Technologies, 2020).
Heat Transfer
A heat transfer coefficient quantifies heat transfer from fluids between the pipes and at the flow
split to their walls. A heat transfer coefficient is determined at each timestep using the velocity
of the fluid, thermophysical properties like thermal conductivity, viscosity, specific heat,
density, and wall surface roughness. In GT-Suite, the heat transfer coefficient of smooth pipes
can be calculated using the Colburn analogy, Dittus-Boelter, Gnielinski, or Sieder-Tate, with
the Colburn analogy being the default option. This correlation is represented by the following
equation (Gamma Technologies, 2020).
ℎ𝑔 = (1
2)𝐶𝑓𝜌𝑈𝑒𝑓𝑓𝐶𝑝𝑃𝑟(−
23
)
Equation 15

23
2.8.5 Flow connections
Physical components in GT-Suite are linked together by connections. These connections are
considered as a plane in which the momentum equation is solved to calculate the mass transfer
and the velocity. Different connections available are Orifice, Valve, Throttle, Pressure loss and
Annular loss (Gamma Technologies, 2020).
Orifice
An opening with a fixed or controllable diameter is referred to as an orifice. It is common to
have a majority of the flow components linked with an 'OrificeConn' connection and is
generally used to specify a flow restriction between two mating components. This flow
restriction is introduced by making the orifice diameter smaller than the component connected
to it (Gamma Technologies, 2020).
Pressure Loss Connection
It is easier to apply a known pressure loss as a function of mass or volumetric flow rate in
certain situations. For such instances, a pressure loss relation has been added to GT-Suite.
This relation can be used to enforce a known pressure loss in complex components such as heat
exchangers, where calculating/solving for the pressure loss is not preferred. This relation,
unlike the others, does not solve the momentum equation, and the solution is merely forced. In
addition to this, a time constant parameter is also provided to avoid mass flow rate fluctuations
and to keep the solution steady (Gamma Technologies, 2020).
Flowsplits
When a finite volume has multiple openings, the interactions cannot be accurately captured by
conventional one-dimensional treatment. In order to overcome this limitation and calculate the
conservation of momentum, flow splits are used. To calculate the momentum solution, the flow
split geometry is determined for each boundary by its expansion diameter (the diameter in
which the flow can spread after entering the flowsplit), characteristic length (the distance
between the boundary plane and the opposite side of the flowsplit) and by considering the
angles between the flows through the volume (Gamma Technologies, 2020).
The flow split solution is similar to the pipe solution such that the scalar quantities of the pipe
are calculated at the volume's centre. The momentum equation, on the other hand, is
calculated for each volume opening individually (Gamma Technologies, 2020).

24
3 Methodology This chapter presents the selected research strategy and data collection method used to answer
the research question. It also subsequently discusses the steps involved in the data interpretation
process and explains how different cases were set up to validate the experiments performed
Two different test rigs were built and studied in this project - auxiliary and Scania’s test rig.
The objective for the auxiliary test rig was to understand modelling and simulation using
CATIA V5 and GT-Suite. The Scania test rig was built to perform more realistic tests, as the
components used on it can be found in a truck. In both the test rigs, different cases were
designed to study the coolant and the air behaviour.
3.1 Auxiliary Test Rig
3.1.1 Case Definitions
The Auxiliary test rig was divided into two cases, Horizontal and Vertical. As shown in Figure
3.1 in blue, the Horizontal case was formed by two pipes placed horizontal (Volume 1 and
Volume 2). The main objective was to study the flow pattern in horizontal tubes, explained in
section b, during a filling. In the Vertical case, in red in Figure 3.1, Volume 2 was replaced
with a hose creating a loop before the expansion device. By creating the loop, some parts of
the hose are vertical allowing the authors to observe the flow pattern in vertical tubes, as
explained in section a.. All the hoses in the circuit were transparent in order to see how the
circuit was filled and detect any air trap.
Figure 3.1 Auxiliary Test Rig Scheme
25
3.1.2 Experimental Setup
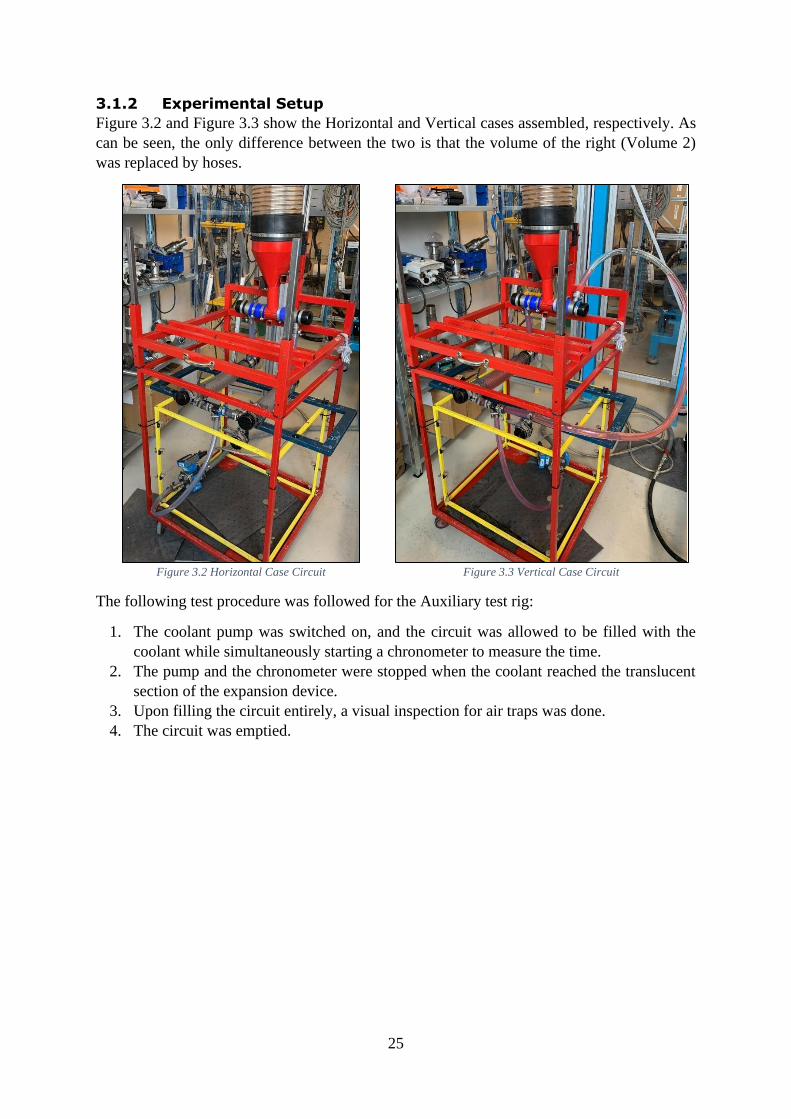
Figure 3.2 and Figure 3.3 show the Horizontal and Vertical cases assembled, respectively. As
can be seen, the only difference between the two is that the volume of the right (Volume 2)
was replaced by hoses.
Figure 3.2 Horizontal Case Circuit
Figure 3.3 Vertical Case Circuit
The following test procedure was followed for the Auxiliary test rig:
1. The coolant pump was switched on, and the circuit was allowed to be filled with the
coolant while simultaneously starting a chronometer to measure the time.
2. The pump and the chronometer were stopped when the coolant reached the translucent
section of the expansion device.
3. Upon filling the circuit entirely, a visual inspection for air traps was done.
4. The circuit was emptied.
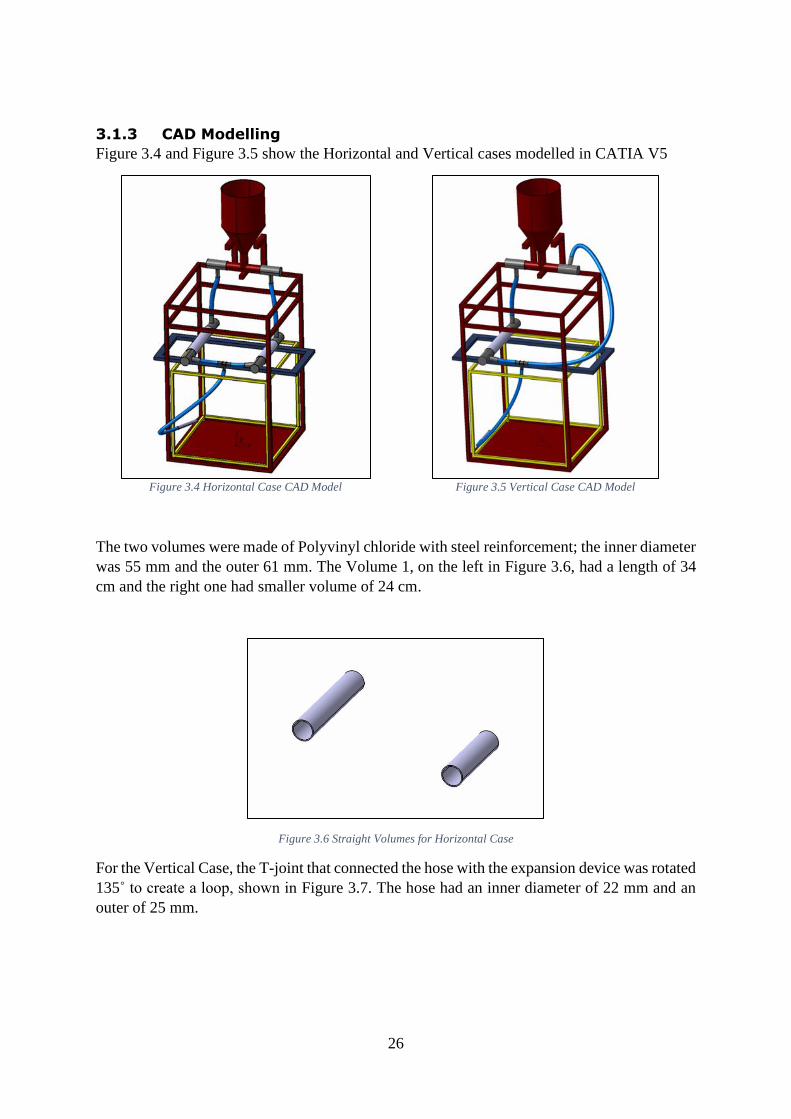
26
3.1.3 CAD Modelling
Figure 3.4 and Figure 3.5 show the Horizontal and Vertical cases modelled in CATIA V5
Figure 3.4 Horizontal Case CAD Model
Figure 3.5 Vertical Case CAD Model
The two volumes were made of Polyvinyl chloride with steel reinforcement; the inner diameter
was 55 mm and the outer 61 mm. The Volume 1, on the left in Figure 3.6, had a length of 34
cm and the right one had smaller volume of 24 cm.
Figure 3.6 Straight Volumes for Horizontal Case
For the Vertical Case, the T-joint that connected the hose with the expansion device was rotated
135˚ to create a loop, shown in Figure 3.7. The hose had an inner diameter of 22 mm and an
outer of 25 mm.
27
Figure 3.7 Hose in Vertical Case
In addition, Table 3.1 shows the total volume of each case calculated by CATIA V5.
Table 3.1 Total Volume in Auxiliary Test Rig
Case Volume [L]
Horizontal 19.659
Vertical 18.922
3.2 Scania Test Rig
3.2.1 Case Definitions
The Scania test rig was divided into five different cases to understand which unique BEV
components could affect the filling simulations. From Case 1 to Case 4, in each case, a new
Scania component was added to reflect the actual components used in the BEV truck, except
for Case 5, which was not a filling test
Case 1
The Scania Test Rig was built, starting with Case 1 as the simplest circuit formed by only the
bottom battery cooling plate, the expansion tank, and a flowmeter.
Case 2
In Case 2, three additional battery cooling plates were added on top of the plate used in Case 1
to the circuit to complete a battery cooling pack that would be found in a Scania BEV truck.
The following Figure 3.8 represents the schematics of Case 1 and Case 2

28
Figure 3.8 Cases 1 and 2 Scheme
Case 3
Case 3 was distinguished from Case 2 with an addition of a mixing line. The mixing line (also
referred to as a distribution line) is a component designed by Scania, which simultaneously
works as a junction from which the coolant is distributed to various components and a
deaeration device. The mixing line has a unique shape that facilitates the air trapped in the
circuit to reach the expansion tank through the static line, after which the air escapes o the
atmosphere. Thus, this device reduces the probability of air being recirculated in the cooling
circuit and battery cooling.
Case 4
Case 4 was formed by adding a pump to Case 3. This water pump recirculates the coolant in
the cooling circuit and the battery cooling plates, ensuring that the batteries work at the
optimum temperature during the truck’s operation.
The following Figure 3.9 represents the schematics of Case 3 and Case 4

29
Figure 3.9 Cases 3 and 4 Scheme
Case 5
Figure 3.10 represents Case 5, and the circuit layout was the same as Case 4. However, the
coolant pump which filled the coolant in the circuit was switched OFF, and the inlet valve was
closed. This was done to examine how the operation of the pump released the air by monitoring
the fluid level in the expansion tank.

30
Figure 3.10 Case 5 Scheme
3.2.2 Experimental Setup
The experimental procedure was the same as the auxiliary test rig but with the addition of a
flowmeter. A flowmeter was added to the circuit to read the coolant's flowrate and use it as an
input to GT-Suite. The ideal position to install the flowmeter would have been after the coolant
pump; however, this could not be done due to limitations in space and was placed after the
right cooling rod instead.
In every case, the test was run three times at three different flow rates to observe how the flow
affects the filling and the creation of air traps in the circuit. Since a rotational valve regulated
the coolant pump, it was challenging to have repeatability in flow rates between the test runs.
Table 3.2 presents the flowrate readings for every case and test run.
The battery cooling plates were not emptied every time due to difficulties in manually turning
over the plates each time after filling. However, to measure the volume of the coolant, the
cooling plates were emptied after Case 2, Test Run 1 and Case 4, Test Run 1. The following
procedure was used to empty the plates:
a. The clamps holding the battery cooling plates together with the cooling rods were loosened.
b. The battery cooling plates were then disconnected from the cooling rod and turned upside-
down, which allowed the coolant to drain from the inlet and the outlet ports into a beaker.
c. This process was carried out sequentially, starting from the top to the bottom cooling plate.
Despite best efforts, some amount of coolant was spilt every time this process was carried out
and could not be measured, which could lead to a significant source of error.

31
Case 1
1. The coolant pump was switched on, and the circuit was allowed to be filled with the
coolant while simultaneously starting a chronometer to measure the time.
2. The pump and the chronometer were stopped when the coolant reached the translucent
section of the expansion device.
3. Upon filling the circuit entirely, a visual inspection for air traps was done.
Case 2
The procedure was the same as in Case 1, and the volume of the coolant in the cooling plates
was measured after Test Run 1
Case 3
The procedure was the same as in Case 1
Case 4
The procedure was the same as in Case 1, and the volume of the coolant in the cooling plates
was measured after Test Run 1
Table 3.2 Flowrate readings
Case Test Run Flowrate [L/min]
1
1 18.9
2 15.4
3 8.1
2
1 15.0
2 12.7
3 12.6
3
1 15.7
2 12.5
3 10.4
4
1 16.3
2 12.3
3 7.1
Since the plates were not emptied in Case 2 (Test Run 2 and Test Run 3), an assumption was
made to accommodate this arrangement. Seven additional seconds were added to the total time
measured by the chronometer. This was assumed because seven seconds was the average time
to fill the cooling plates in Case 2.
Furthermore, another significant difference from the auxiliary test rig was the location of the
cooling inlet. In the auxiliary test rig, the coolant inlet was placed in the lowest point of the
circuit while, in the Scania test rig, it was located 106.098mm above the bottom-most cooling
plate, as shown in Figure 3.11.

32
Figure 3.11 Cooling Inlet
Case 5
As mentioned before, Case 5 was not a filling. Therefore, the test procedure for this case was:
1. After filling in case 4, the cooling inlet was unplugged, and the valve was closed.
2. The pump was turned on while simultaneously starting a chronometer to measure the
time.
3. Every 20 seconds, the volume of the coolant in the expansion tank was measured and
noted. It was determined that if there was air trapped in the circuit, then the coolant
volume in the expansion tank would drop as the air traps were removed. This behaviour
was observed for 6 minutes, after which the test was concluded.
This test was run twice, one with the pump at full speed (25 L/min) and the other at half speed
(13.3 L/min).
3.2.3 CAD Modelling
In the Scania test rig, all cases included the battery cooling plates, the expansion tank and the
flowmeter. These components were common to all the cases.
Only one cooling plate was modelled, shown in Figure 3.12 below, and was further duplicated.
The total capacity of one cooling plate was 0.503 L.
Figure 3.12 Cooling plate CAD Model (based on Appendix 1)

33
The expansion tank, Figure 3.13, had a total capacity of 11.2 L. Nevertheless, for safety
reasons, the expansion tank had to be filled between the MAX and MIN lines, corresponding
to 5.5 L and 3.8 L, respectively.
Figure 3.13 Expansion Tank CAD Model
The volumes of the main components from the Scania test rig are stated in the Table 3.3 below.
Table 3.3 Main Component Volumes
Component Volume [L]
Cooling Plate 0.503
Expansion Tank 5.500
Left Cooling Rod 0.553
Right Cooling Rod 0.515
Flowmeter 0.080
Mixing Line 2.049
Pump 0.031
Table 3.4 shows the total volume of each case. Case 5 is not included since it had the same
volume as Case 4. The differences in volumes in every case was due to the addition of a new
component.
Table 3.4 Total Volume in Scania Test Rig
Case Volume [L]
1 8.653
2 10.426
3 12.399
4 12.444
All the CAD models for each case are in Appendix 2.
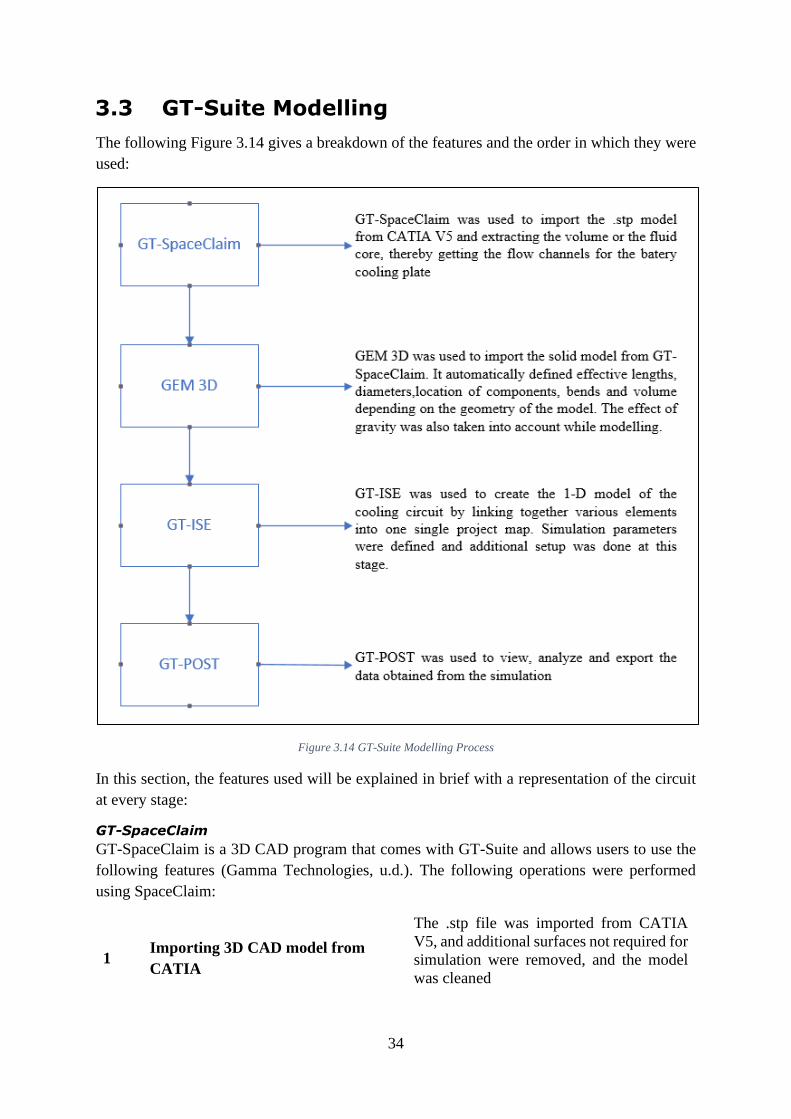
34
3.3 GT-Suite Modelling
The following Figure 3.14 gives a breakdown of the features and the order in which they were
used:
Figure 3.14 GT-Suite Modelling Process
In this section, the features used will be explained in brief with a representation of the circuit
at every stage:
GT-SpaceClaim
GT-SpaceClaim is a 3D CAD program that comes with GT-Suite and allows users to use the
following features (Gamma Technologies, u.d.). The following operations were performed
using SpaceClaim:
1 Importing 3D CAD model from
CATIA
The .stp file was imported from CATIA
V5, and additional surfaces not required for
simulation were removed, and the model
was cleaned
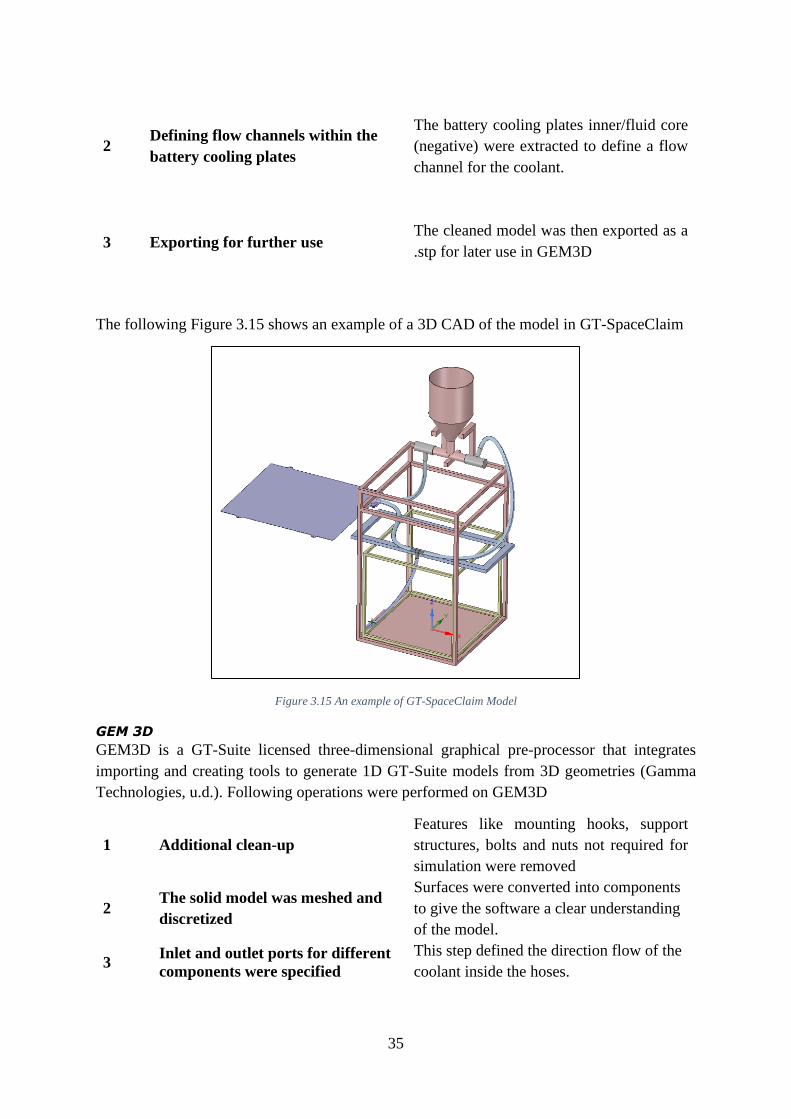
35
2 Defining flow channels within the
battery cooling plates
The battery cooling plates inner/fluid core
(negative) were extracted to define a flow
channel for the coolant.
3 Exporting for further use
The cleaned model was then exported as a
.stp for later use in GEM3D
The following Figure 3.15 shows an example of a 3D CAD of the model in GT-SpaceClaim
Figure 3.15 An example of GT-SpaceClaim Model
GEM 3D
GEM3D is a GT-Suite licensed three-dimensional graphical pre-processor that integrates
importing and creating tools to generate 1D GT-Suite models from 3D geometries (Gamma
Technologies, u.d.). Following operations were performed on GEM3D
1 Additional clean-up
Features like mounting hooks, support
structures, bolts and nuts not required for
simulation were removed
2 The solid model was meshed and
discretized
Surfaces were converted into components
to give the software a clear understanding
of the model.
3 Inlet and outlet ports for different
components were specified
This step defined the direction flow of the
coolant inside the hoses.

36
The 3D model was then converted into a 1D representation by exporting as a .gtsub file with
the following parameters:
1 Pipe Discretization Length
Specifies the length of each sub-element –
30mm was used.
2
Shell Discretization Lengths along
X, Y and Z directions
30mm was used
3
Flowsplit Acceptance ratio
Specifies the percentage of the cube’s
volume that must be present for the flow
split to be retained.- 50% was used
(Rudravajhala, 2018)
The following Figure 3.16 shows the 3D CAD of the model in GEM3D
Figure 3.16 An example of a GEM3D Model
GT-ISE (Integrated Simulation Environment)
GT-ISE is the primary interface for creating models, declaring simulation parameters, and
running simulations. It is an ecosystem in which different elements are brought onto a project
map and linked together to form an overall model (Gamma Technologies, u.d.).
The following steps were performed within GT-ISE:
1 Model and Setup A 1D circuit diagram representing the
coolant flow in the 3D model was set up
with all the components
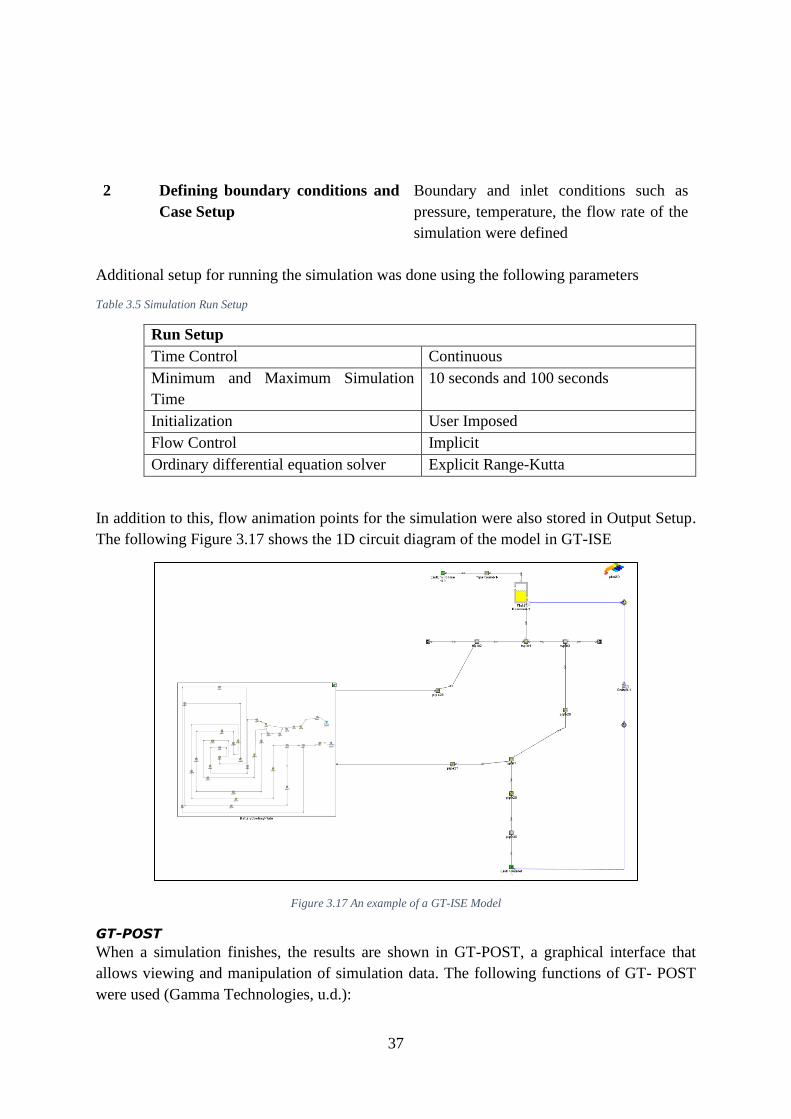
37
2
Defining boundary conditions and
Case Setup
Boundary and inlet conditions such as
pressure, temperature, the flow rate of the
simulation were defined
Additional setup for running the simulation was done using the following parameters
Table 3.5 Simulation Run Setup
Run Setup
Time Control Continuous
Minimum and Maximum Simulation
Time
10 seconds and 100 seconds
Initialization User Imposed
Flow Control Implicit
Ordinary differential equation solver Explicit Range-Kutta
In addition to this, flow animation points for the simulation were also stored in Output Setup.
The following Figure 3.17 shows the 1D circuit diagram of the model in GT-ISE
Figure 3.17 An example of a GT-ISE Model
GT-POST
When a simulation finishes, the results are shown in GT-POST, a graphical interface that
allows viewing and manipulation of simulation data. The following functions of GT- POST
were used (Gamma Technologies, u.d.):
38
1
Result viewing and analysis
Results from the simulation were viewed
and analysed.
Each component had a set of results, which
gave a better understanding and a detailed
insight into the flow properties through
various components
2
Exporting data to visualize the
results better
Additional plots, pictures and reports were
generated to store the data. In this thesis,
volumetric flow rate, pressure drops and
3D animation were stored using reports.
Some of these values were also exported to
a spreadsheet for computation on Microsoft
Excel
The following Figure 3.18 shows the 1D circuit diagram of the model in GT-POST
Figure 3.18 An example of a GT-POST View
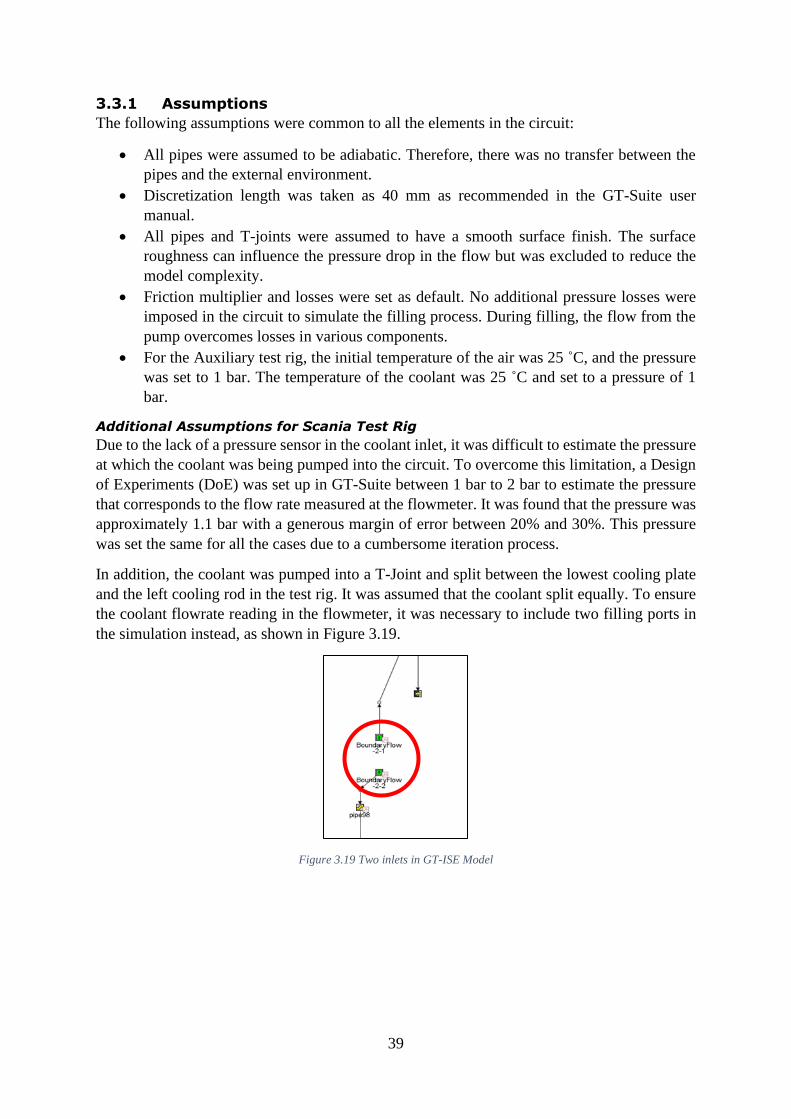
39
3.3.1 Assumptions
The following assumptions were common to all the elements in the circuit:
• All pipes were assumed to be adiabatic. Therefore, there was no transfer between the
pipes and the external environment.
• Discretization length was taken as 40 mm as recommended in the GT-Suite user
manual.
• All pipes and T-joints were assumed to have a smooth surface finish. The surface
roughness can influence the pressure drop in the flow but was excluded to reduce the
model complexity.
• Friction multiplier and losses were set as default. No additional pressure losses were
imposed in the circuit to simulate the filling process. During filling, the flow from the
pump overcomes losses in various components.
• For the Auxiliary test rig, the initial temperature of the air was 25 ˚C, and the pressure
was set to 1 bar. The temperature of the coolant was 25 ˚C and set to a pressure of 1
bar.
Additional Assumptions for Scania Test Rig
Due to the lack of a pressure sensor in the coolant inlet, it was difficult to estimate the pressure
at which the coolant was being pumped into the circuit. To overcome this limitation, a Design
of Experiments (DoE) was set up in GT-Suite between 1 bar to 2 bar to estimate the pressure
that corresponds to the flow rate measured at the flowmeter. It was found that the pressure was
approximately 1.1 bar with a generous margin of error between 20% and 30%. This pressure
was set the same for all the cases due to a cumbersome iteration process.
In addition, the coolant was pumped into a T-Joint and split between the lowest cooling plate
and the left cooling rod in the test rig. It was assumed that the coolant split equally. To ensure
the coolant flowrate reading in the flowmeter, it was necessary to include two filling ports in
the simulation instead, as shown in Figure 3.19.
Figure 3.19 Two inlets in GT-ISE Model
40
3.3.2 Components
This section explains the components used to build the model in GT-ISE.
Auxiliary Test Rig
1. Coolant Pump The pump introduced coolant to the circuit and was modelled using the 'EndFlowInlet'
template in GT-ISE from general flow components, which allows users to specify
different properties of coolant, for example, composition, temperature, and pressure.
Using this template, it is also possible to adjust the volumetric flow rate of the coolant.
In GT-Suite v2021, 'EndFlowInlet' was renamed to 'BoundaryFlow'. Here on, these
terms will be used interchangeably.
Figure 3.20 Coolant Pump
2. Deaeration split
To provide deaeration for the circuit, a small pipe was connected at the highest point in
the expansion tank, allowing the majority of the air trapped within the circuit to escape
back to the atmosphere.
Figure 3.21 Deaeration Split
3. Expansion Tank
The expansion tank was modelled using the 'FluidReservoir’ template. Since this was
done to simulate the filling process, the liquid volume was set as 0L. The
‘FluidReservoir’ template requires two distinct initial conditions of the fluid, one for
air and one for coolant. Here, the composition of air was set using the ‘air2’ template
which is used for non-combustible air. The coolant was set as a mixture of 50%
Ethylene Glycol and 50% Water. This template is called ’egl-5050’.
Figure 3.22 Expansion Tank

41
4. 3-way T-joint
The 3-way T-joints were modelled as flow splits using the template ‘FlowSplitTRight’
in GT ISE from general flow components. This template allows three ports to be
modelled for the T-joint. Port 1 and 2 represent the main line, and port 3 represents the
diameter of the perpendicular.
Figure 3.23 T-Joint
5. End-Flow Caps
To simulate the end of a pipe or a section that was capped off to the flow of the coolant,
a template called ‘EndFlowCap’ was used. In GT-Suite v2021, ‘EndFlowCap’ was
renamed to ‘BoundaryFlowCap’. Here on, these terms will be used interchangeably.
Figure 3.24 End-Flow Claps
6. Coolant and Air
The coolant was modelled using the ‘FluidInitialState’. This template allows the
initialisation of the flow of a fluid with pressure and temperature with humidity and
altitude.
Scania Test Rig
For the Scania test rig, he same components as the auxiliary test rig were modelled. In addition
to these, the flowmeter and the cooling plates were also modelled in GT-ISE.
The flowmeter was modelled using a 'PipeRound' template in GT-ISE from general flow
components. The pipe was modelled as a straight pipe without any bend. The flow meter used
in the test rig indicates the flowrate of the coolant from the pump, but in the case of the
modelling, the flowrate is controlled used the 'EndFlowInlet'.
Figure 3.25 Flowmeter in GT-ISE

42
The volumetric flowrate was measured in the orifices before and after the flowmeter,
highlighted in red in Figure 3.26.
Figure 3.26 Flowrate Measurement in GT-ISE
The cooling plate was modelled as a combination of different ‘PipeRound’ and ‘FlowSplit’,
as shown in Figure 3.27.
Figure 3.27 Battery Cooling Plate in GT-ISE
Case 5
In case 5, initially, during filling, the cooling rods had the flow in the same direction. However,
after the water pump was switched ON, the flow direction in one section reverses after filling.
This allows the coolant to be recirculated within the circuit. In order to account for this, three
new templates were used:
• SensorConn: Senses the volume of the coolant in the expansion tank.
• Switch: The switch receives a signal from the SensorConn and sends the signal to
‘SignalHold.’
• SignalHold: SignalHold retains the min/max value from the switch and sends it to an
‘ActuatorConn.’
• ActuatorConn: This template is used for an actuator for the ‘Switch’ that overrides the
initial input.
43
In this case, when the expansion tank was being filled, volume level signals were sent to the
‘SensorConn’, which passed the signals to the ‘Switch’. The ‘Switch’, depending on whether
the expansion tank was full or not, allowed the flow of coolant from the inlet. When the
expansion tank was full, a signal to stop the filling was sent to ‘EndFlowInlet’ and another to
start the pump.
This circuit setup needs additional fine-tuning to be ready to run and was therefore set as an
optional objective for the thesis work.
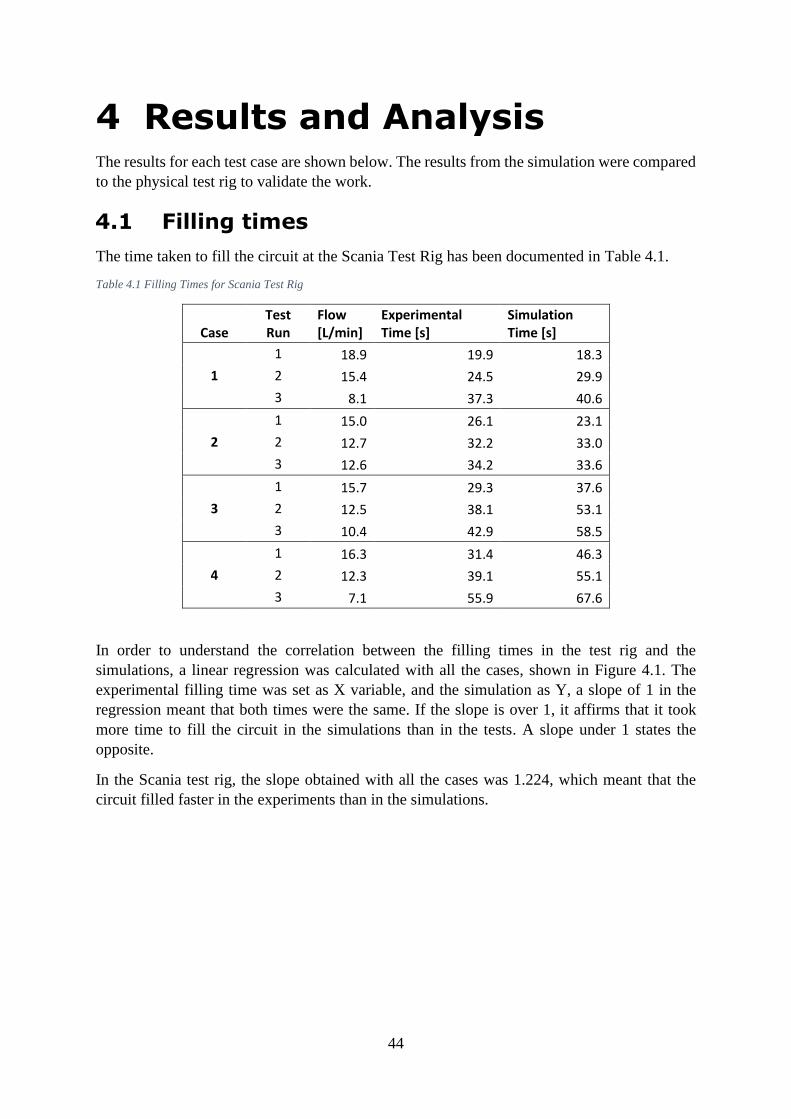
44
4 Results and Analysis The results for each test case are shown below. The results from the simulation were compared
to the physical test rig to validate the work.
4.1 Filling times
The time taken to fill the circuit at the Scania Test Rig has been documented in Table 4.1.
Table 4.1 Filling Times for Scania Test Rig
Case Test Run
Flow [L/min]
Experimental Time [s]
Simulation Time [s]
1
1 18.9 19.9 18.3
2 15.4 24.5 29.9
3 8.1 37.3 40.6
2
1 15.0 26.1 23.1
2 12.7 32.2 33.0
3 12.6 34.2 33.6
3
1 15.7 29.3 37.6
2 12.5 38.1 53.1
3 10.4 42.9 58.5
4
1 16.3 31.4 46.3
2 12.3 39.1 55.1
3 7.1 55.9 67.6
In order to understand the correlation between the filling times in the test rig and the
simulations, a linear regression was calculated with all the cases, shown in Figure 4.1. The
experimental filling time was set as X variable, and the simulation as Y, a slope of 1 in the
regression meant that both times were the same. If the slope is over 1, it affirms that it took
more time to fill the circuit in the simulations than in the tests. A slope under 1 states the
opposite.
In the Scania test rig, the slope obtained with all the cases was 1.224, which meant that the
circuit filled faster in the experiments than in the simulations.
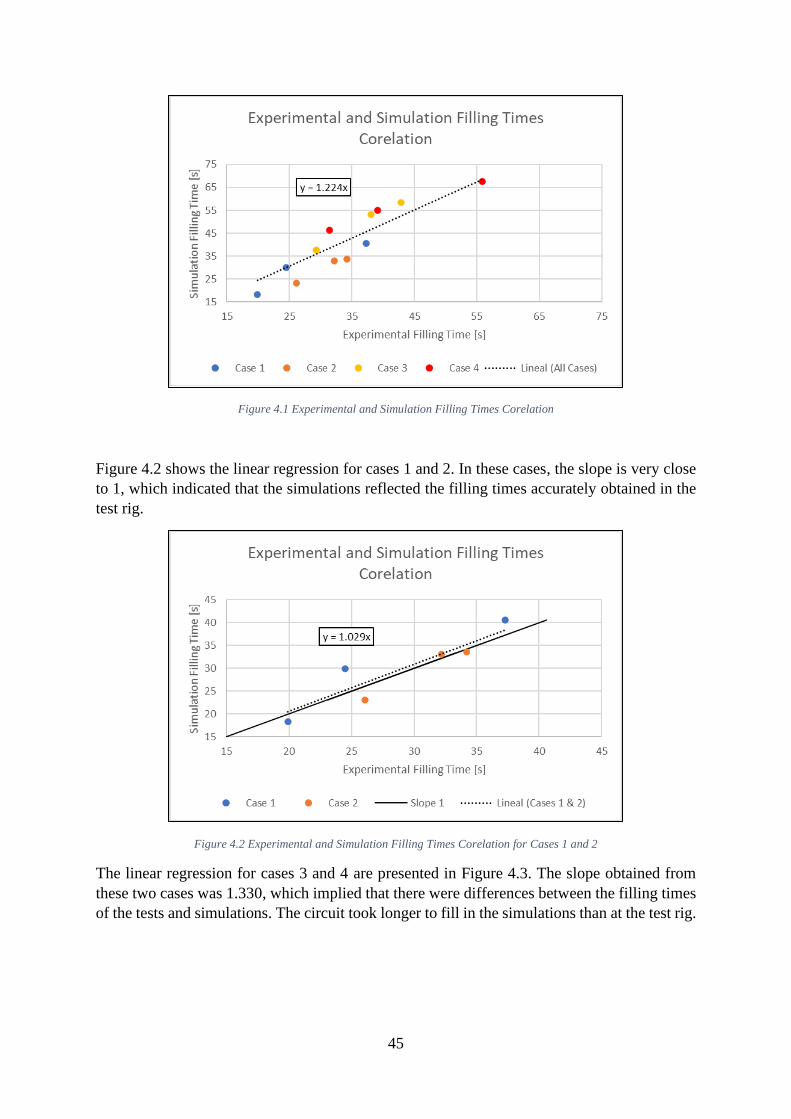
45
Figure 4.1 Experimental and Simulation Filling Times Corelation
Figure 4.2 shows the linear regression for cases 1 and 2. In these cases, the slope is very close
to 1, which indicated that the simulations reflected the filling times accurately obtained in the
test rig.
Figure 4.2 Experimental and Simulation Filling Times Corelation for Cases 1 and 2
The linear regression for cases 3 and 4 are presented in Figure 4.3. The slope obtained from
these two cases was 1.330, which implied that there were differences between the filling times
of the tests and simulations. The circuit took longer to fill in the simulations than at the test rig.
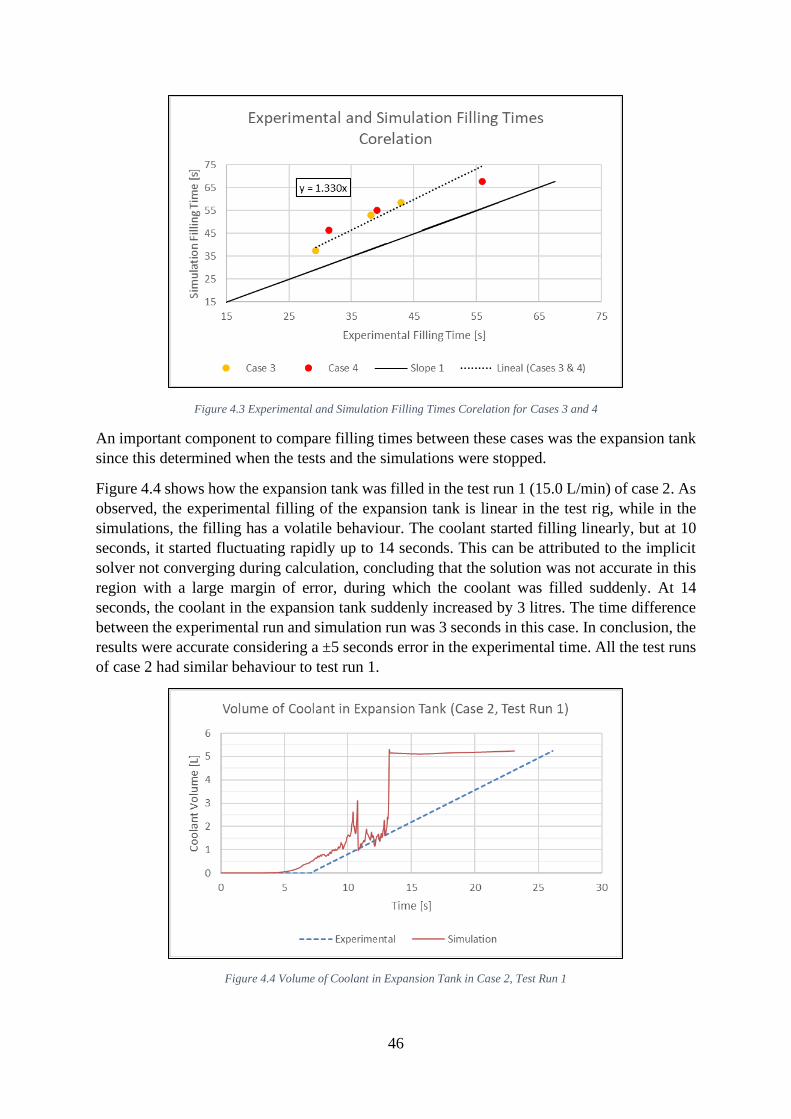
46
Figure 4.3 Experimental and Simulation Filling Times Corelation for Cases 3 and 4
An important component to compare filling times between these cases was the expansion tank
since this determined when the tests and the simulations were stopped.
Figure 4.4 shows how the expansion tank was filled in the test run 1 (15.0 L/min) of case 2. As
observed, the experimental filling of the expansion tank is linear in the test rig, while in the
simulations, the filling has a volatile behaviour. The coolant started filling linearly, but at 10
seconds, it started fluctuating rapidly up to 14 seconds. This can be attributed to the implicit
solver not converging during calculation, concluding that the solution was not accurate in this
region with a large margin of error, during which the coolant was filled suddenly. At 14
seconds, the coolant in the expansion tank suddenly increased by 3 litres. The time difference
between the experimental run and simulation run was 3 seconds in this case. In conclusion, the
results were accurate considering a ±5 seconds error in the experimental time. All the test runs
of case 2 had similar behaviour to test run 1.
Figure 4.4 Volume of Coolant in Expansion Tank in Case 2, Test Run 1

47
In the test run 1 (16.3 L/min) of case 4, plotted in Figure 4.5. The filling of the expansion tank
at the test rig is linear, similar to case 2. In the simulation, the expansion tank started filling
slowly before the test run. At approximately 27 seconds, the coolant stopped filling linearly
and was volatile until 40 seconds. This resulted in the coolant filling the expansion tank
suddenly, as explained in case 2 simulations. After this sudden filling, the expansion tank filled
linearly till the end. Comparing the experimental and simulation filling time, the expansion
tank filled 15 seconds earlier in the experimental run than the simulations.
Figure 4.5 Volume of Coolant in Expansion Tank in Case 4, Test Run 1
4.2 Air traps
4.2.1 Auxiliary Test Rig
Horizontal Case
Figure 4.6 shows the air traps observed in the horizontal case. The type of flow observed was
plug flow in volumes 1 and 2, and the bubbles accumulated at the top of the horizontal hoses.
These air traps always occurred at the same location, despite changing the flow rate and were
attributed to the circuit's geometry. However, as shown in Figure 4.7, GT-Suite failed to
simulate the air traps seen in Figure 4.6.
Upon further investigation, it was found that a 1D approach to flow simulation divides a length
of a pipe into different subvolumes defined by the discretisation length. Inside each subvolume,
the fluid is homogenous, with uniform properties and conditions inside the entire subvolume.
This means that a single subvolume contains a fluid mixture of a uniform quality rather than
tracking the individual bubble movements for a two-phase mixture.
In order to detect an air trap of this scale, a flow model to the pipe solution needs to be added
that tracks the fluid and vapour velocities separately which are not currently available in GT-
Suite.

48
Figure 4.6 Horizontal Case Air Traps
Figure 4.7 Horizontal Case Simulation Results
Vertical Case
The type of flow observed in the volume, in this case, was bubbly at first and completely free
of air when the expansion tank was filled. The only air trap was seen in the loop, which is
highlighted in Figure 4.8. This air trap was primarily due to the geometry of the hose, which
led to the coolant not reaching higher up and filling the circuit. This case was accurately
simulated by GT-Suite as there was only air in this section and not a two-phase mixture of both
coolant and air. The simulated air trap can be seen in Figure 4.9.
Figure 4.8 Vertical Case Air Trap
Figure 4.9 Vertical Case Simulation Results

49
4.2.2 Scania Test Rig
Case 1
In Test Run 1 and Test Run 2, air traps were neither observed in the test rig nor in the
simulations, as shown in Figure 4.10 and Figure 4.11
Figure 4.10 Case 1, Test Run 1 Simulation Results
Figure 4.11 Case 1, Test Run 2 Simulation Results
However, in the third run at 8.1 L/min, a big air trap was seen in the hose that connects the
flowmeter and the T-Joint in the test rig, shown in Figure 4.12.
Figure 4.12 Case 1, Test Run 3 Air Trap
This big air trap was not seen in simulation results, as shown in the hose highlighted in red in
Figure 4.13 at the test rig. GT-Suite flow solver utilizes a sequential flow model through every
pipe and orifice. This means the mass flow moves uniformly across each discretised sub-
volume when the system is balanced, and there is no separation of fluids within a sub-volume.
Whereas, in this test rig, a stratified flow was observed in some cases with coolant and air in
separate layers, which is challenging to capture in a 1D simulation. Predicting this in GT-Suite
poses a challenge because stratification between different fluid densities is not captured.

50
Figure 4.13 Case 1, Test Run 3 Simulation Results
Table 4.2 is derived from section 2.7.1 and summarizes the type of flow observed in case 1 at
the test rig:
Table 4.2 Types of Flow in Case 1
Test Run 1 - 18.9 L/min Bubbly flow at first, no air traps when filled
Test Run 2 - 15.4 L/min Bubbly flow at first, no air traps when filled
Test Run 3 - 8.1 L/min Plug flow in certain sections, some air traps
when filled
Due to the circuit's geometry and the coolant inlet location, it was assumed that the coolant in
the bottom plate was never removed and that it would have the highest amount of coolant. This
assumption showed consistent results and was verified by measuring the plates using the
process mention in 3.2.2 under subsection Case 1.
Case 2
In order to make the circuit more detailed and reflect the test rig, three additional cooling plates
were included in the model and simulated.
During simulating Case 2, it was noticed that GT-Suite does not have a robust model of liquid
flowing along the bottom of a pipe. This was especially pronounced when the three additional
cooling plates were added to the circuit, and the solver had difficulties in converging.
It was observed that the top cooling plate was not entirely filled in Test Run 1, as highlighted
in Figure 4.14. However, this could not be visually validated at the test rig due to the difficulties
mentioned in 3.2.2.
Table 4.3 shows the volume of coolant measured after Test Run 1.
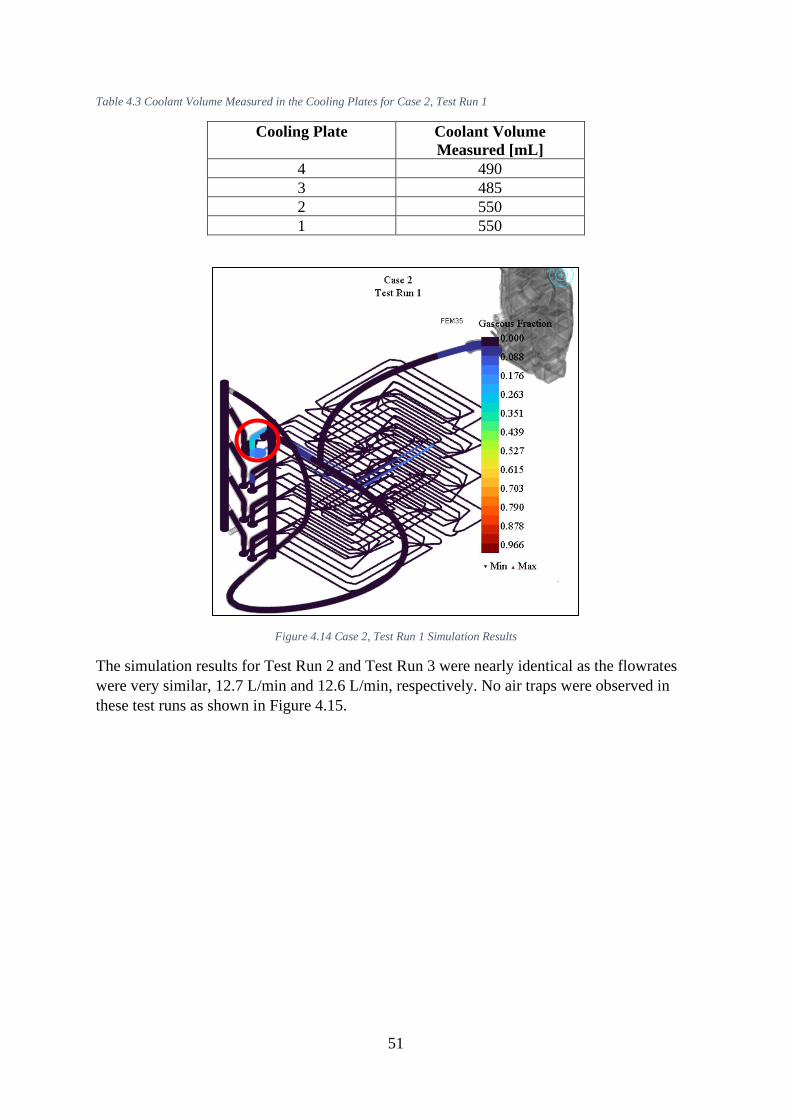
51
Table 4.3 Coolant Volume Measured in the Cooling Plates for Case 2, Test Run 1
Cooling Plate Coolant Volume
Measured [mL]
4 490
3 485
2 550
1 550
Figure 4.14 Case 2, Test Run 1 Simulation Results
The simulation results for Test Run 2 and Test Run 3 were nearly identical as the flowrates
were very similar, 12.7 L/min and 12.6 L/min, respectively. No air traps were observed in
these test runs as shown in Figure 4.15.
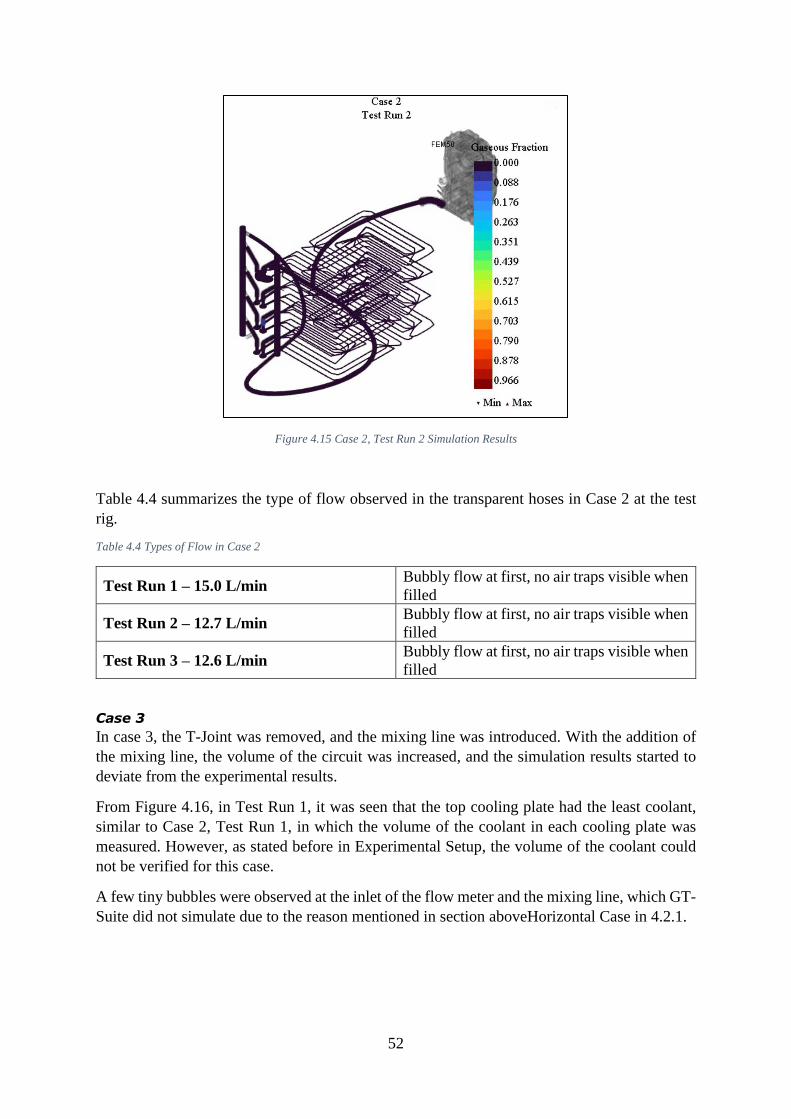
52
Figure 4.15 Case 2, Test Run 2 Simulation Results
Table 4.4 summarizes the type of flow observed in the transparent hoses in Case 2 at the test
rig.
Table 4.4 Types of Flow in Case 2
Test Run 1 – 15.0 L/min Bubbly flow at first, no air traps visible when
filled
Test Run 2 – 12.7 L/min Bubbly flow at first, no air traps visible when
filled
Test Run 3 – 12.6 L/min Bubbly flow at first, no air traps visible when
filled
Case 3
In case 3, the T-Joint was removed, and the mixing line was introduced. With the addition of
the mixing line, the volume of the circuit was increased, and the simulation results started to
deviate from the experimental results.
From Figure 4.16, in Test Run 1, it was seen that the top cooling plate had the least coolant,
similar to Case 2, Test Run 1, in which the volume of the coolant in each cooling plate was
measured. However, as stated before in Experimental Setup, the volume of the coolant could
not be verified for this case.
A few tiny bubbles were observed at the inlet of the flow meter and the mixing line, which GT-
Suite did not simulate due to the reason mentioned in section aboveHorizontal Case in 4.2.1.
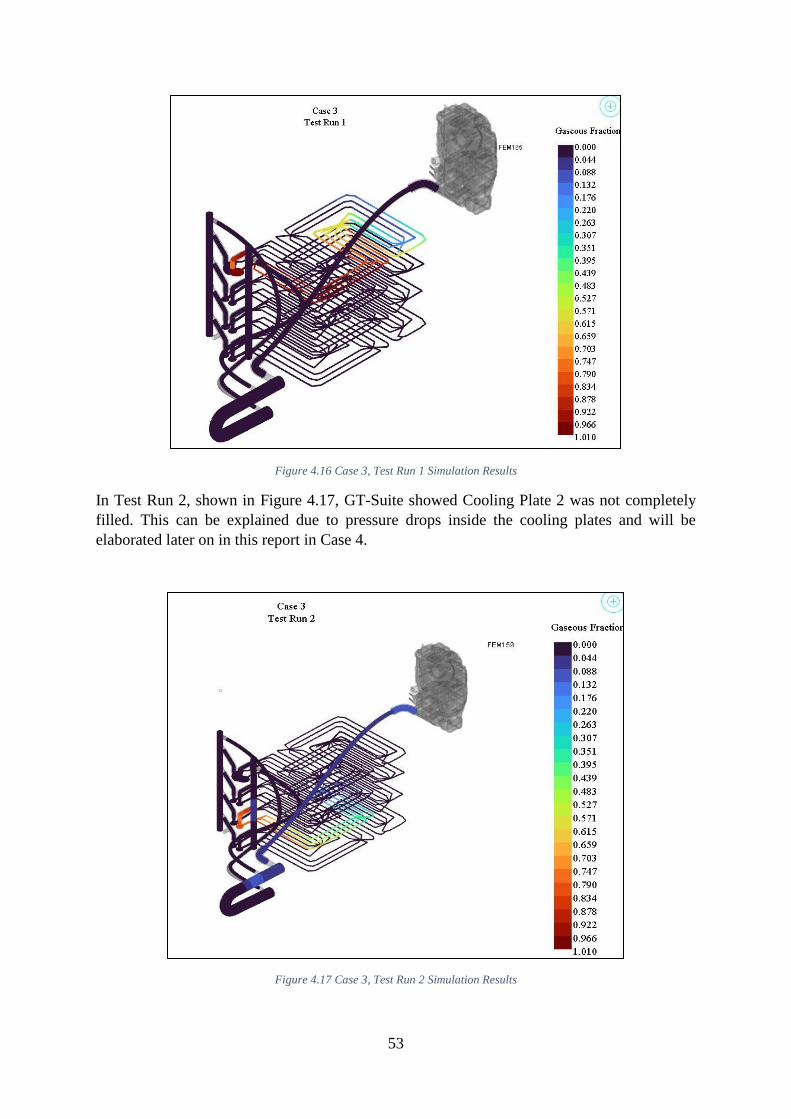
53
Figure 4.16 Case 3, Test Run 1 Simulation Results
In Test Run 2, shown in Figure 4.17, GT-Suite showed Cooling Plate 2 was not completely
filled. This can be explained due to pressure drops inside the cooling plates and will be
elaborated later on in this report in Case 4.
Figure 4.17 Case 3, Test Run 2 Simulation Results

54
In Test Run 3, shown in Figure 4.18, the simulation showed a higher air fraction inside the
mixing line. However, this was not possible to verify as the mixing line was made of steel. In
addition to this, the static line had a minimal amount of air. During filling at the test rig, it was
observed that the trapped bubbles continuously escaped through the mixing line to the
expansion tank.
Figure 4.18 Case 3, Test Run 3 Simulation Results
Table 4.5 summarizes the type flow observed in the transparent hoses in Case 3 at the test rig.
Table 4.5 Types of Flow in Case 3
Test Run 1 – 15.7 L/min Bubbly flow at first, no large air traps visible
when filled
Test Run 2 – 12.5 L/min Bubbly flow at first, no large air traps visible
when filled
Test Run 3 – 10.4 L/min Bubbly flow at first, no large air traps visible
when filled
Case 4
In case 4, the long hose was split into two smaller hoses with a pump in between both the hoses.
This pump was not switched on during the testing, but it added complexity to the circuit's
geometry.
The deviation seen in Case 3 continued in Case 4, with the simulation taking more time to fill
the circuit compared to the experimental test.
Similar to Case 2 and Case 3, the top cooling plate showed air traps in the simulation, shown
in Figure 4.19, and this was verified by emptying the coolant from the cooling plates using the
procedure mentioned in Experimental Setup.

55
Figure 4.19 Case 4, Test Run 1 Simulation Results
In the Test Run 2, shown in Figure 4.20, the Cooling Plate 2 was not entirely filled, similar to
Test Run 2 in Case 3. During the Test Run 2 in both cases, a slight pressure difference was
observed in the simulations between the inlet cooling rod and the inlet to the coolant plates.
Fluid always flows from higher pressure to lower pressure, and the inlet of the cooling plates
always had a higher pressure, causing an airlock, shown in Figure 4.21.
Figure 4.20 Case 4, Test Run 2 Simulation Results

56
Figure 4.21 Case 4, Test Run 2 Pressures
The inlet of the cooling plates was 19 mm, 12 mm less than the inlet of the cooling rod, which
meant that coolant flowed straight up instead of uniformly entering the cooling plates. When
the volumetric flow rate was high, the flow rate instantly dropped, and the coolant failed to
enter the inlet of the plate (Case 3, Test Run 2 and Case 4, Test Run 2). However, this was
incorrect, and it was experimentally found that plate 2 had a significantly higher volume of
coolant, as shown in Table 4.6.
Table 4.6 Coolant Volume Measured in the Cooling Plates for Case 4, Test Run 1
Cooling Plate Coolant Volume
Measured [mL]
4 485
3 473
2 550
1 550
The results from Test Run 3 were very similar to Test Run 3 in Case 3, as shown in Figure
4.22. The air traps were simulated in the mixing line and the top cooling plate, and it was
verified that the top cooling plate (plate 4 in 4.6) had less volume of coolant than in the other
plates. It should be noted that the method employed to measure the volume of the cooling plates
had a big margin of error, as stated in Experimental Setup.

57
Figure 4.22 Case 4, Test Run 3 Simulation Results
Table 4.7 summarizes the type flow observed in the transparent hoses in case 4 at the test rig:
Table 4.7 Types of Flow in Case 4
Test Run 1 – 16.3 L/min Bubbly flow at first, no air traps visible when
filled
Test Run 2 – 12.3 L/min Bubbly flow at first, no air traps visible when
filled
Test Run 3 – 7.1 L/min Plug flow in certain sections, some air traps
visible when filled
Case 5 (running the water pump)
• A circuit for simulating Case 5 was built on GT-ISE to start the water pump at half
speed when the filling stops; however, due to lack of time and software limitations, the
simulation for this case was not completed, only the experimental results were
documented, and a rough model is presented in the section.
For deaeration, an experimental test, Case 5, was built upon the already existing Case 4.
Following results were obtained from Case 5:
• Upon filling till the max line on the expansion tank, it was found that running the pump
reversed the direction of flow and recirculated the coolant to remove the air from the
circuit, which was not removed during filling.
• This led to a drop in the height of the coolant in the expansion tank. When the pump
was run at full speed (approximately 25 L/min), the coolant level had only dropped by
2 mm. At the pump’s half speed (approximately 13 L/min), the coolant had dropped
around 13 mm, as shown in Figure 4.23, which meant that the pump’s operation had
removed approximately 0.41 L trapped air from the circuit.

58
Figure 4.23 Drop in the height of coolant level in the Expansion tank at Case 5 (13 L/min)
• Furthermore, it was observed that larger air traps on passing through the pump were
dispersed as tiny air bubbles throughout the circuit (mist flow from section Flow
Pattern in Horizontal Tubes). This behaviour was predominant when the pump was
run at full speed.
• At the pump’s half-speed, the bubbly flow eventually merged to form a plug flow. This
led to bigger air bubbles being accumulated in the static line and eventually escaping
through the expansion tank during the operation of the pump.

59
5 Discussions
5.1 Filling Times & Air Traps
The expansion tank's port height plays a vital role and has to be carefully selected to avoid
errors during simulations. The air needs someplace to escape to, and this has to be defined
accurately, else the pressure builds up in the circuit, and the simulation fails to execute. It was
observed that GT-Suite gave a fatal error stating that pressure in a specific component is beyond
10,000,000 bar. However, upon discussing this issue with GT support staff, it was found that
port height was responsible for this error and not the component that was displayed in the error
message.
It was concluded that the current version of GT-Suite could not simulate mist flow or bubbly
flow accurately due to the reasons mentioned in section 4.2.1. Since Case 1 and Case 2 showed
similar characteristics and were discussed together. Likewise, Case 3 and Case 4 are also
discussed together due to similar results obtained from both the cases.
5.1.1 Case 1 and 2
• GT-Suite simulated Case 1 and Case 2 circuits better, and the filling time for both the
simulation and the physical test was similar. This was likely because case 1 and case 2
circuits were relatively easier to model in GT-Suite with fewer flowsplits and the
absence of a distribution line. A set of simplifications are made in GT-Suite to calculate
equations that are difficult to solve in 1D, as mentioned in section 2.8.5. As a result,
when the number of flowsplits increases, there is a possibility of reduced accuracy in
the results obtained.
• It was found that low flow rates of the coolant in the circuit attributed to plug flow in
some instances, such as in Case 1 Test Run 3, as summarized in Table 4.2
• In test run 1, case 2, a small air trap was simulated in the top cooling plate, and this was
experimentally verified by measuring the volume of fluid after that test run. At the same
time GT-Suite simulated that the Cooling Plate 3 was completely filled, however this
was incorrect, and it was experimentally proven to have air inside.
5.1.2 Case 3 and 4
• In both Case 3 and Case 4, the simulation results were similar to each other as the
geometry was almost identical, with the exception of a pump in Case 4. However, this
pump did not affect simulations as it was switched off.
• To have higher accuracy in simulations, it is advisable to have the coolant flow in a
single direction. There are higher chances of an airlock when the coolant enters the
cooling plates from both the inlet and outlet directions.
• Upon addition of other components such as the mixing line, three additional cooling
plates, the circuit was more complex in comparison to Case 1 and Case 2. This meant
that additional components that were modelled, which increased the number of
flowsplits and GT Suite struggled to simulate the cases accurately. However, there
could be multiple factors influencing the non-convergence of results and a detailed
study has to be done for different parameter to determine the root cause.

60
• In the simulations, it was observed that pressure drops caused the Cooling Plate 2 not
to be filled; however, after experimentally measuring the volume of the coolant after
the Test Run 1 in Case 4, it was found that GT-Suite simulated this incorrectly, and the
plate was entirely filled by coolant.
5.1.3 Case 5 (Effects of airlocks moving through a water pump)
One method of removing air in the BEV circuit was to run the coolant pump to displace the air
traps. This operation of the coolant pump can be replicated in GT-Suite. In the test rig, it was
observed that, at full speed of the pump, air traps moving through the coolant pump and created
‘mist flow’. When the pump was running at half speed, coolant and air formed ‘plug flow’ with
big air bubbles that were directed to the static line and, consequently, to the expansion tank
allowing a good deaeration.
GT-Suite cannot simulate mist flow due to the reasons mentioned in section 5.1. The mist flow
prevents deaeration due to the tiny bubbles not having time to accumulate at the mixing line
but instead, they were forced throughout the circuit. This is an issue because when the pumps
are turned off, there may be air left in the circuit and the next time the truck is in operation,
there will be airlocks or mist flow in the circuit, which could reduce the coolant-carrying
capacity of the circuit.
5.2 Limitations
Gamma Technologies is continually improving GT-Suite; it runs on a variety of operating
systems and comes in a variety of versions. This product, like any other large software product,
has inevitable glitches, challenges, and limitations.
Several shortcomings of the GT-Suite were discovered during this thesis work. As a result of
frequent communication with the Gamma Technologies support team, some complaints were
submitted, and it was found that a variety of issues encountered would be addressed in future
versions of the program.
In this section, various software issues that arose during the project would be discussed and
potential workarounds for some of them.
GEM 3D Limitation
To import the flow channels from the CAD model of the battery cooling plate, GT-SpaceClaim
was used. Furthermore, this solid was then saved as a .stp file and imported to GEM 3D. In
GEM 3D, the pipes were cut into different sections with their appropriate, effective diameters,
which changes the visual geometry to a ‘pipe with multiple bends’. In addition to this, in the
GEM3D v2020, there was no option to extract volume, which made it cumbersome and one
single flow channel had to be split into multiple sections. This limitation has been addressed in
v2021.

61
Inaccurate flow solver for certain situations
After communicating with GT-Suite support, it was found that the software does not have a
robust model of liquid flowing along the bottom of a pipe. Simply put, the air needs someplace
to go as the coolant is being added; otherwise, it will be trapped. GT is currently working on
this limitation and improving the solvers to depict the simulations accurately.
Limitations with stratified, plug and bubbly flow simulations
A 1D approach to flow simulation divides the length of pipe into different sub volumes,
typically between 5-50 mm in length. Inside each sub volume, the fluid is homogeneous, with
uniform properties and conditions inside the entire sub volume. For a two-phase mixture, this
means that a single sub volume contains a fluid mixture of a uniform quality rather than
tracking the individual bubble movements making it impossible to see air bubbles within the
coolant in the circuit. GT is researching how a stratified flow model could be added to their
pipe solution that could track the fluid and vapour velocities separately. However, this is not
available in the current version, v2021.
Air bubbles in the pipes cause an increase in Reynolds number, tending towards a turbulent
flow (Ezzat, et al., 2017). Reynolds number is an essential factor when calculating the heat
convection, and increased turbulence leads to a higher rate of convective heat transfer in the
case of high liquid flow quality. However, the sub-volumes contained a small amount of air
which could affect the heat convection, as the heat transfer coefficient is different for both air
and coolant.
Theoretically, mist flow means that there is air trapped within the liquid in the pipes, which
significantly reduces the cooling effectiveness of the system, as the air occupies space that
would instead be occupied by coolant. This leads to a risk of not achieving the desired cooling
levels in certain parts of the system or throughout the system and could adversely affect the
lifetime of the components, especially the battery packs. In such scenarios, there is a significant
cause of concern on relying only on 1D simulations on GT-Suite as GT-Suite gives a better
overview on a system level than on a component level, and therefore when simulations for
individual components are needed, the results should be validated through a 3D CFD
simulation software to check for discrepancies.
Complex CAD Design for simulations
It was discovered that a better CAD model for the battery cooling plates is necessary. A lot of
time was spent on cleaning the model and converting it to a solid, and despite best efforts, it
was a significant source of error as the inconsistent design (such as missing faces, edges, etc.)
leads to an incorrect volume of the flow channels when measured in CATIA and GT-Suite.
Case 5
Case 5 was built upon Case 4 to observe the airlocks moving throughout the circuit during the
operation of the water pump. However, this posed a challenge in GT-Suite as a flow split had
to be created to bypass the pump while filling as the ‘PumpFlow’ template, which sets a
constant flow rate in that section of the circuit but does not allow filling of adjacent subvolumes
if the flow rate is set to 0 L/min. This simulation model for this case was not finalised and
needs additional work.

62
6 Conclusion Through this research, it was found that there is a potential in using 1D CFD techniques to
simulate the coolant-air interaction in a cooling system. As mentioned earlier, this study was
conducted only for the lower temperature battery cooling circuit, which was a limited part of
the complete circuit. Due to this, no concrete recommendations can be made for other parts of
the circuit, but general estimations and a trend can be obtained by viewing the results of this
thesis work.
The work done during this thesis can be used as an example of what is possible in GT-Suite
and how can filling simulations be carried out with GT-Suite. While this study provides a good
initial point for validation, further study is necessary to test additional parts of the circuit with
a different setup to obtain more accurate results, as suggested in chapter 7. This will ensure
repeatability in the technique and build upon the previously done work to provide quick
solutions to the otherwise cumbersome task of building a new circuit.
6.1 Research Question 1
How well does the 1D simulations of filling a cooling system in Gamma Technologies Suite
(GT-Suite) equal filling a cooling system in a test rig?
From the results, it was found that GT-Suite can replicate the behaviour observed during testing
at both the auxiliary and the Scania test rig with some differences compared to the results
obtained from the physical experiments. This difference can be reduced by fine-tuning the
model further (by using accurate information from different sensors, modelling the geometry
accurately and increasing the discretisation). Nevertheless, from the results, it was found that
GT-Suite does not have a robust model yet to accurately simulate the interaction of coolant and
air in certain parts of the circuit, as mentioned in section 4. GT is currently working on
improving their model in the successive versions of the software.
6.2 Research Question 2
What limitations could unique BEV components impose on 1D simulations?
It was observed that upon the addition of the three cooling plates, the implicit solver in GT-
Suite struggled to converge, and the model failed to reach a steady-state solution for increasing
time in every case. This effect was especially pronounced in Case 3 and Case 4, upon the
addition of the mixing line and removing the T-Joint. It is suspected that the addition of these
components changed the overall dynamics of the circuit (an example of which is explained
with pressure drops in Test Run 2, Case 4) and increased the complexity of the geometry,
resulting in inaccurate results.

63
6.3 Research Question 3
To observe where the air is trapped in the circuit during filling and how can it be removed?
Air traps were observed in both the auxiliary and the Scania test rig. GT-Suite accurately
simulated air traps in the auxiliary test rig and this was because the coolant never reached that
section of the circuit. However, this test rig was only built to understand the working of GT-
Suite and to understand the relationship between the flow rate and the air traps created.
In the Scania test rig, small air traps were observed in Case 3 and Case 4 during filling. Case 5
focuses explicitly on deaeration, and it was found that the static line should have an increasing
angle with respect to the mixing line throughout its length to allow more air bubbles to escape
the circuit.
Different flow rates affect the deaeration and should be studied in detail to have a more robust
understanding of the behaviour of the fluid flowing through the circuit as suggested in section
7 as the experimental results showed that it is possible to have better deaeration at lower speeds
of the coolant pump.
Alternative methods were discovered theoretically, however, not performed experimentally.
These methods have been listed in section 7.
6.4 Research Contribution
1. This thesis work will help in increasing simulation done in R&D and reduce the
computation time it takes to perform simulations.
Currently, detailed 1D CFD simulations are limited to some components and only a few
departments within Scania. 1D CFD simulations on GT-Suite are easier and quicker to
perform than on 3D CFD software such as StarCCM+ or ANSA. 1D simulations can
allow the testing and design of the entire system as well as component level to some
extent to go hand in hand without delays.
2. Shorter lead time to launch BEV Trucks to reduce the carbon footprint of Scania’s
customers
The automotive industry is quickly racing towards implementing sustainable solutions,
including a rapid shift towards BEVs to reduce the carbon footprint, which can be
avoided if these trucks are brought into the market quicker. This thesis contributes to
three Sustainable Development Goals (United Nations, 2015):
64
• By 2030, upgrade infrastructure and
retrofit industries to make them
sustainable, with increased resource-use
efficiency and greater adoption of clean
and environmentally sound technologies
and industrial processes.
• Enhance scientific research, upgrade the
technological capabilities of industrial
sectors in all countries by 2030,
encouraging innovation and
substantially increasing the number of
research and development workers and
public, private research and
development spending
• By 2030, provide access to safe,
affordable, accessible, and sustainable
transport systems for all, improving road
safety, notably by expanding public
transport.
• By 2030, reduce the adverse per capita
environmental impact of cities,
including paying special attention to air
quality.
• Improve education, awareness-raising
and human and institutional capacity on
climate change mitigation, adaptation,
impact reduction and early warning.
• Integrate climate change measures into
strategies and planning.
3. Decreases the number and iterations of physical prototypes
1D CFD simulations can simulate the flow of coolant in the test rig instead of
manufacturing prototypes of the actual test rig. This provides cost and time-saving
opportunities and simultaneously avoids waste generation. Furthermore, it also
decreases the need for labour and allows for better resource optimisation

65
4. Less physical iterations required to a design approved (reduces labour, waste, and
resource optimisation)
A skeletal circuit with essential components can be designed on GT-Suite, and
additional components can be added to the circuit to make it more complex, eventually
including the entire cooling circuit.

66
7 Future work This thesis concludes with a validation that was carried out between the experimental testing
and the 1D CFD filling simulation using GT-Suite. The majority of the data, such as flowrates,
circuit geometry, was obtained from the test rig at Scania with additional input from GT-Suite
support staff to assist with the course of the work. This thesis work also provided insights into
the limitations in the entities used, and future research work can be to look into the limitations
and finding alternate strategies for 1D simulations.
The following is a list of recommendations from the authors of this thesis for an alternative
approach when reproducing the results of this thesis.
• A release valve that opens when air pressure exceeds a set threshold, especially before
pumps. It was observed that larger air traps on passing through the pump are dispersed
as small air bubbles throughout the circuit. This behaviour of the pump splitting the
large bubble into multiple smaller bubbles could be studied further in detail.
• The battery cooling plates and the mixing line in the test rig could be made of a much
more transparent material instead of aluminium to observe the air and coolant
interaction for testing.
• The battery cooling plates could be turned around, and the coolant flow could be against
gravity as it was very challenging to remove the coolant from the bottom plate once
filled.
• Due to difficulties in emptying the plates after every test run, a value of 7 seconds was
added to every subsequent filling test run; however, this was a very rough
approximation of the time it could take for different flow rates.
• The coolant could be filled from the lowest point in the circuit that is from the bottom-
most cooling plate instead. During this thesis work, it was observed that GT-Suite has
difficulties simulating the flow of coolant when it enters the circuit from two inlets.
Many times, this resulted in the implicit solver not converging, thereby reducing the
reliability of the results.
Scope of improvement
In order to obtain better simulation results from the circuit, the following areas of opportunities
were seen but could not be addressed either due to the limitation of time or due to limitations
of the software at its current version.
• A finer discretisation of components like flow channels inside the mixing line and
battery cooling plates in GEM3D will improve the accuracy of the results. The majority
of the components in this thesis work were set with a discretisation length of 30-40 mm.
• Additional fine-tuning of the 1D circuit diagrams can be done in GT-ISE to make it
easier to understand and have more data regarding the pressure drops at each section in
the battery cooling plates.
• An additional pressure sensor and flowmeter can be installed at the inlet to obtain the
data accurately. Due to the absence of a pressure sensor at the inlet, it was challenging

67
to find out the pressure of the coolant being pumped into the system; instead, the
volumetric flow rate for each case was experimentally found out and measured through
the flowmeter installed in a different section of the circuit.
• Alternate theories and hypotheses to analyse the pressure drops in cooling rods and the
battery cooling plates can be done
• Correlation between air traps and Reynolds number (turbulent or laminar flow).
• A vacuum pump can be used to remove air in production, but it is not used during
testing at test rigs. A vacuum pump should be introduced to the test rigs to prevent
airlocks, mist flow and observe this behaviour in a much more detailed manner.

68
References Astakhov, V. P. & Joksch, S., 2012. Environmentally friendly near-dry machining of metals.
In: Metalworking Fluids (MWFs) for Cutting and Grinding. s.l.:Woodhead Publishing, pp.
135-200.
BorgWarner, 2020. BorgWarner’s New High-Voltage Coolant Heaters are the First Choice
of Global OEMs, s.l.: s.n.
Burak, S., Tolga, E. & Omer, T., 2017. Does a battery-electric truck make a difference? –
Life cycle emissions, costs, and externality analysis of alternative fuel-powered Class 8
heavy-duty trucks in the United States. Journal of Cleaner Production, Volume 141, pp. 110-
121.
Cengel, Y. A., 2011. Heat and Mass Transfer.. s.l.:McGraw-Hill Education.
Chastain, J., 2006. Internal Combustion Engine Cooling Strategies: Theory and Test, s.l.: s.n.
Cheremisinoff, N. P. & Gupta, R., 1983. Handbook of fluids in motion. s.l.:Ann Arbor
Science.
Cruz, D. A., Coelho, P. M. & Alves, M. A., 2012. A Simplified Method for Calculating Heat
Transfer Coefficients and Friction Factors in Laminar Pipe Flow of Non-Newtonian Fluids.
Journal Of Heat Transfer-Transactions Of The Asme, 134(9).
Dinakar, P. & Rajeeve, G., 2016. Modelling and Simulation of Cooling , s.l.: Chalmers
Univeristy of Technology.
Evans Cooling Systems Australasia, 2016. DON’T BE FOOLED BY THE ‘AIR LOCK’.
[Online]
Available at: https://www.evanscoolants.com.au/news/dont-be-fooled-by-the-air-lock/
[Accessed 18 March 2021].
Ezzat, A. W., Abdullah, N. N. & Ghashim, S. L., 2017. Effect of Air Bubbles on Heat
Transfer Coefficient in Turbulent Convection Flow. Journal of Engineering, 23(1).
Feng, X. et al., 2018. Thermal runaway mechanism of lithium ion battery for electric
vehicles: A review. Energy Storage Materials, Volume 10, pp. 246-267.
Gamma Technologies, 2020. GT-Suite User Manual, s.l.: s.n.
Gamma Technologies, n.d. GEM3D Preprocessor. [Online]
Available at: https://www.gtisoft.com/gt-suite/productivity-tools/gem3d-preprocessor/
[Accessed 10 April 2021].
Gamma Technologies, n.d. GT-ISE (Integrated Simulation Environment). [Online]
Available at: https://www.gtisoft.com/gt-suite/productivity-tools/gt-ise-integrated-simulation-
environment/
[Accessed 10 April 2021].
Gamma Technologies, n.d. GT-POST. [Online]
Available at: https://www.gtisoft.com/gt-suite/productivity-tools/gt-ise-integrated-simulation-

69
environment/
[Accessed 10 April 2021].
Gamma Technologies, n.d. GT-SPACECLAIM. [Online]
Available at: https://www.gtisoft.com/gt-suite/productivity-tools/gt-spaceclaim-cad-model-
building-and-preparation/
[Accessed 10 April 2021].
Gao, Q. et al., 2019. An experimental investigation of refrigerant emergency spray on cooling
and oxygen suppression for overheating power battery. Journal of Power Sources, Volume
415, pp. 33-43.
Hu, X. et al., 2020. Battery warm-up methodologies at subzero temperatures for automotive
applications: Recent advances and perspectives. Progress in Energy and Combustion Science,
Volume 77.
International Transport Forum, 2017. ITF Transport Outlook, s.l.: OECD/ITF.
Jaewan, K., Jinwoo, O. & Hoseong, L., 2019. Review on battery thermal management system
for electric vehicles. Applied Thermal Energy, Volume 149, pp. 192-212.
Jarrett, A. & Kim, Y., 2011. Design optimization of electric vehicle battery cooling plates for
thermal performance. Journal of Power Sources, 196(23), pp. 10359-10368.
Kakaç, S., Liu, H. & Pramuanjaroenkij, A., 2002. Heat Exchangers. 3rd ed. Boca Raton:
CRC Press.
Kane, M., 2017. Efficiency Compared: Battery-Electric 73%, Hydrogen 22%, ICE 13%, s.l.:
s.n.
Lajunen, A., Yang, Y. & Emadi, A., 2018. Recent Developments in Thermal Managementof
Electrified Powertrains. TRANSACTIONS ON VEHICULAR TECHNOLOGY, 67(12).
Liimatainen, H., van Vliet, O. & Aplyn, D., 2019. The potential of electric trucks – An
international commodity-level analysis. Applied Energy, Volume 236, pp. 804-814.
Li, J. & Zhu, Z., 2014. Battery Thermal Management Systems of , s.l.: Chalmers Univeristy of
Technology.
Lin, W. & Sundén, B., 2010. Vehicle Cooling Systems for Reducing Fuel Consumption and
Carbon Dioxide: Literature Survey. SAE Technical Paper.
Miao, Y., Hynan, P., von Jouanne, A. & Yokochi, A., 2019. Current Li-Ion Battery
Technologies in Electric Vehicles and Opportunities for Advancements. Energies, 12(6), pp.
1074-1094.
Mulholland, E. et al., 2018. The long haul towards decarbonising road freight – A global
assessment to 2050. Applied Energy, Volume 216, pp. 678-693.
OARDS Automotive Hub, 2020. Top 5 Causes of Car Overheating: Read This and Save
Your Engine!. [Online]
Available at: https://oards.com/causes-of-car-overheating/
[Accessed 18 March 2021].
70
Palmgren, J. & Hjälm Wallborg, M., 2015. Improving engine oil cooler , s.l.: s.n.
Peters, A. et al., 2012. Electric mobility concepts and their significance for the economy,
society and the environment, s.l.: s.n.
Prudhvi, G., Vinay, G. & Suresh Babu, G., 2013. Cooling Systems in Automobiles & Cars.
International Journal of Engineering and Advanced Technology (IJEAT), 2(1).
Q.Xin & C.F.Pinzon, 2014. Improving the environmental performance of heavy-duty vehicles
and engines: key issues and system design approaches. s.l.:s.n.
Rapp, B. E., 2017. Fluids. In: Microfluidics: Modeling, Mechanics and Mathematics.
s.l.:Elsevier, pp. 243-263.
Rudravajhala, M., 2018. Evaluation of 1D and 3D CFD Simulation, Gothenburg:
CHALMERS UNIVERSITY OF TECHNOLOGY.
Sato, N., 2001. Thermal behavior analysis of lithium-ion batteries for electric and hybrid
vehicles. Journal of Power Sources, 99(1-2), pp. 70-77.
Śliwiński, K. & Szramowiat, M., 2018. Development of cooling systems for internal
combustion engines in the light of the requirements of modern drive systems. IOP
Conference Series: Materials Science and Engineering, 421(4).
Stringer, D. & Park, K., 2020. Why Building an Electric Car Is So Expensive, For Now, s.l.:
Bloomberg Green.
Teboho, C. et al., 2018. Thermal Conductivity of Graphite-Based Polymer Composites.
IntechOpen.
Transport & Environment, 2017. Electric truck's contribution to freight decarbonisation, s.l.:
s.n.
United Nations, 2015. The 17 Goals. [Online]
Available at: https://sdgs.un.org/es/goals
[Accessed 2 July 2021].
White, F. M., 2010. Fluid Mechanics. s.l.:McGraw-Hill Education.
Wolfram, P. & Lutsey, N., 2016. Electric vehicles: Literature review of technology costs and
carbon emissions, s.l.: International Council on Clean Transportation.
X-Engineer, 2021. [Online]
Available at: https://x-engineer.org/automotive-engineering/vehicle/electric-
vehicles/anatomy-of-a-battery-electric-vehicle-bev/
[Accessed 8 June 2021].
Xylem Applied Water Systems, 2015. Pump cavitation and how to avoid it, s.l.: s.n.
Zhang, T., 2020. When to Use 1D Vs. 3D Simulation. [Online]
Available at: https://blog.softinway.com/when-to-use-1d-vs-3d-simulation/
Zimmerman, A. H. & Quinzio, M. V., 2010. Lithium Plating in Lithium-Ion Cells. s.l., The
Aerospace Corporation.

Related Documents











