This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution and sharing with colleagues. Other uses, including reproduction and distribution, or selling or licensing copies, or posting to personal, institutional or third party websites are prohibited. In most cases authors are permitted to post their version of the article (e.g. in Word or Tex form) to their personal website or institutional repository. Authors requiring further information regarding Elsevier’s archiving and manuscript policies are encouraged to visit: http://www.elsevier.com/copyright

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
This article appeared in a journal published by Elsevier. The attachedcopy is furnished to the author for internal non-commercial researchand education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling orlicensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of thearticle (e.g. in Word or Tex form) to their personal website orinstitutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies areencouraged to visit:
http://www.elsevier.com/copyright

Author's personal copy
Stochastic modelling considering ionospheric scintillation effectson GNSS relative and point positioning
Heloısa Alves da Silva a,*, Paulo de Oliveira Camargo a, Joao Francisco Galera Monico a,Marcio Aquino b, Haroldo Antonio Marques a, Giorgiana De Franceschi c, Alan Dodson b
a Department of Cartography, Sao Paulo State University, Roberto Simonsen – 305, Presidente Prudente, SP, 19060-900, Brazilb Institute of Engineering Surveying and Space Geodesy (IESSG), University of Nottingham, University Park, Nottingham NG7 2RD, UK
c Istituto Nazionale di Geofisica e Vulcanologia (INGV), Via di Vigna Murata – 605, Roma, 00143, Italy
Received 14 April 2009; received in revised form 11 September 2009; accepted 12 October 2009
Abstract
Global Navigation Satellite Systems (GNSS), in particular the Global Positioning System (GPS), have been widely used for high accu-racy geodetic positioning. The Least Squares functional models related to the GNSS observables have been more extensively studied thanthe corresponding stochastic models, given that the development of the latter is significantly more complex. As a result, a simplified sto-chastic model is often used in GNSS positioning, which assumes that all the GNSS observables are statistically independent and of thesame quality, i.e. a similar variance is assigned indiscriminately to all of the measurements. However, the definition of the stochastic modelmay be approached from a more detailed perspective, considering specific effects affecting each observable individually, as for example theeffects of ionospheric scintillation. These effects relate to phase and amplitude fluctuations in the satellites signals that occur due to dif-fraction on electron density irregularities in the ionosphere and are particularly relevant at equatorial and high latitude regions, especiallyduring periods of high solar activity. As a consequence, degraded measurement quality and poorer positioning accuracy may result.
This paper takes advantage of the availability of specially designed GNSS receivers that provide parameters indicating the level of phaseand amplitude scintillation on the signals, which therefore can be used to mitigate these effects through suitable improvements in the leastsquares stochastic model. The stochastic model considering ionospheric scintillation effects has been implemented following the approachdescribed in Aquino et al. (2009), which is based on the computation of weights derived from the scintillation sensitive receiver tacking mod-els of Conker et al. (2003). The methodology and algorithms to account for these effects in the stochastic model are described and results ofexperiments where GPS data were processed in both a relative and a point positioning mode are presented and discussed.
Two programs have been developed to enable the analyses: GPSeq (currently under development at the FCT/UNESP Sao Paulo StateUniversity – Brazil) and PP_Sc (developed in a collaborative project between FCT/UNESP and Nottingham University – UK). Thepoint positioning approach is based on an epoch by epoch solution, whereas the relative positioning on an accumulated solution usinga Kalman Filter and the LAMBDA method to solve the Double Differences ambiguities. Additionally to the use of an improved sto-chastic model, all data processing in this paper were performed using an option implemented in both programs, to estimate, for eachobservable, an individual ionospheric parameter modelled as a stochastic process, using either the white noise or the random walk cor-relation models. Data from a network of GPS Ionospheric Scintillation and TEC Monitor (GISTM) receivers set up in Northern Europeas part of the ISACCO project (De Franceschi et al., 2006) were used in the experiments. The point positioning results have shownimprovements of the order of 45% in height accuracy when the proposed stochastic model is applied. In the static relative positioning,improvements of the order of 50%, also in height accuracy, have been reached under moderate to strong scintillation conditions. Theseand further results are discussed in this paper.� 2009 COSPAR. Published by Elsevier Ltd. All rights reserved.
Keywords: GNSS; GPS; Ionospheric scintillation; Receiver tracking models; Stochastic model; Relative and point positioning
0273-1177/$36.00 � 2009 COSPAR. Published by Elsevier Ltd. All rights reserved.
doi:10.1016/j.asr.2009.10.009
* Corresponding author. Tel.: +55 3229 5388; fax: +55 3229 5353.E-mail address: [email protected] (H.A. da Silva).
www.elsevier.com/locate/asr
Available online at www.sciencedirect.com
Advances in Space Research 45 (2010) 1113–1121

Author's personal copy
1. Introduction
Global Navigation Satellite Systems (GNSS), the Glo-bal Positioning System (GPS) in particular, have beenwidely used for high accuracy geodetic positioning. TheLeast Squares functional models related to the GNSSobservables have been more exhaustively studied than thecorresponding stochastic models, as the development ofthe latter is significantly more complex. A simplified sto-chastic model is normally used, which assumes that allthe GNSS observables are statistically independent andhave the same variance. In this paper, possible improve-ments to the stochastic model were investigated, in partic-ular with a view to account for the effects of ionosphericscintillation on the satellites signals. A new strategy toaccount for these effects was implemented and describedin Aquino et al. (2009), which is based on the receivertracking models of Conker et al. (2003). This strategywas employed in this paper in an attempt to mitigate theionospheric scintillation effects at high latitudes during aperiod of moderate to strong scintillation, on both relativeand point positioning modes. Data from two GPS Iono-spheric Scintillation and TEC Monitor (GISTM) receiverswas used in the experiments. These units have been set upin Svalbard, as part of the Ionospheric Scintillation ArcticCampaign Coordinated Observations (ISACCO) project(De Franceschi et al., 2006),
In order to account for the effects of scintillation on theGPS data processing two programs have been developed,which enable GPS data processing in both a relative anda point positioning mode, respectively: GPSeq (currentlyunder development at the FCT/UNESP Sao Paulo StateUniversity – Brazil) and PP_Sc (developed in a collabora-tive project between FCT/UNESP and Nottingham Uni-versity – UK). Whereas in Aquino et al. (2009) all datawere processed only in relative mode on an epoch by epochbasis and with no correction for the background iono-sphere, in this paper all data were processed in both relativeand point positioning modes, and with the estimation of anepoch-wise ionospheric parameter, which is individual toeach observable. In Section 2 brief details are given ofthe ionospheric parameter estimation, while in Section 3a brief description is presented on the estimation of thereceiver tracking errors through the models of Conkeret al (2003). Section 4 reviews the approach to improvethe stochastic model in the presence of ionospheric scintil-lation and results are discussed in Section 5. Section 6 con-tains the conclusions.
2. Estimation of ionospheric effects in the GNSS processing
The ionospheric parameter estimation in a relative senseis based on the Double Difference (DD) mathematicalmodel for the phase (D/rs
ij ) and pseudorange (DPDrsij ), con-
sidering stations i and j and satellites r and s, for each of thetwo GPS frequencies (L1 and L2). These epoch-wise iono-spheric residual effects can be modeled as a stochastic pro-
cess using correlation models such as white noise (Gelbet al., 1974). The least squares adjustment model using thisstrategy can be implemented with the introduction of a fic-titious observable (usually referred to as a pseudo-observa-ble) for the ionospheric residual of each DD observable.For each epoch, this pseudo-observable is introduced inthe adjustment along with the DD observables of codeand carrier phase on the L1 and L2 frequencies. In thiscase, a zero mean and an arbitrary standard deviation forthe pseudo-observable can be adopted (e.g. as in Bocket al. 1986; Odijk, 2002 and Liu 2001). To assign a plausiblestandard deviation to this pseudo-observable, an a priori
knowledge about the DD ionospheric residual effect isnecessary.
The Least Squares linearized mathematical model con-sidering the DD ionospheric residual as an unknownparameter, can be written as (Liu, 2001; Odijk, 2002):
D/rsijL1 ¼ Dqrs
ij � DIrsij þ DT rs
ij þ kL1DN rsijL1
D/rsijL2 ¼ Dqrs
ij � bDIrsij þ DT rs
ij þ kL2DN rsijL2
DPDrsijL1 ¼ Dqrs
ij þ DIrsij þ DT rs
ij ð1ÞDPDrs
ijL2 ¼ Dqrsij þ bDIrs
ij þ DT rsij
DIrsij ¼ 0
where
Dqrsij ¼ qr
i � qrj � qs
i þ qsj – DD geometric distance;
DT rsij – DD residual tropospheric;
DN rsij ¼ Nr
i � N rj � Ns
i þ Nsj – DD ambiguity;
DIrsij ¼ 0 – residual ionospheric pseudo-observable;
b ¼ f1
f2
� �2
; f 1 ¼ 1575:42 MHz f 2 ¼ 1227:6 MHz
The estimation of the ionosphere parameter in the pointpositioning case can be achieved in a similar manner. How-ever, the estimated parameter will be the slant ionospheredelay for each satellite/receiver path, as opposed to DDdelays. In this case, as there is no differentiation, a good ini-tial value for the pseudo-observable is required. In thispaper, these initial values were estimated from the Klobu-char model (Klobuchar, 1996) and were associated with astandard deviation chosen by the user.
3. Estimating the tracking errors
The strategy used to improve the stochastic model relieson the estimation of the tracking errors when the satellites’signals are subject to the occurrence of ionospheric scintil-lation. These errors are calculated based on the trackingmodels of Conker et al. (2003), which are then used toassign weights to the different satellites in view by the recei-ver antenna.
For details of the tracking models used in this paper thereader is referred to Conker et al. (2003). For the pseudo-ranges, their models calculate the variance of the output
1114 H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121

Author's personal copy
code tracking errors from a first order DLL for L1 GPScode and from a first order DLL for L2 semicodeless aidedby L1. For the variance of the output phase tracking error,they present models for two common types of PLL: a thirdorder L1 carrier PLL and a second order L1-aided L2 car-rier PLL, the latter also referred to as L2 semicodeless. Asan illustration of those models, according to that paper, thetracking error variances at the output of the receiver PhaseLocked Loop (PLL) for the GPS L1 carrier and at the out-put of the Delay Locked Loop (DLL) for the L1 C/A codeare described here. For the PLL it is given by:
r2PLL ¼ r2
/SL1þ r2
/T L1þ r2
/OSC; ð2Þ
where
r2/SL1
– phase scintillation variance for the L1 carrier;r2
/T L1– thermal noise variance for L1 carrier;
r2/OSC
– receiver/satellite oscillator noise variance(assumed to be equal to 0.1 rad).
The thermal noise variance of the L1 carrier is given by:
r2/T L1¼
BnL11þ 1
2gðc=n0ÞL1�CAð1�2S24ðL1ÞÞ
h iðc=n0ÞL1�CAð1� S2
4ðL1ÞÞ; ð3Þ
where
BnL1– L1 third-order PLL one-sided bandwidth, equal
to 10 Hz;g – pre-detection integration time, equal to 0.02 s forGPS;ðc=n0ÞL1�CA – Fractional form of signal-to-noise densityratio, equal to 100;1ðC=N0ÞL1�CA model valid only forS4(L1) < 0.707; loss of lock is assumed for greater valuesof S4.
Finally, the phase scintillation component for the L1 car-rier is given by:
r2/SL1¼ pT
kf p�1n sin ½2kþ1�p�p
2k
� � ; ð4Þ
where
T – spectral strength of the phase noise at 1 Hz;k – order of the PLL (3 for carrier L1);fn – loop natural frequency, 1.91 Hz for carrier L1;p – spectral slope of the phase power spectral density(PSD) for f >> f0, where f0 is the frequency correspond-ing to the maximum irregularity size in the ionosphere(1 < p < 2k).
The spectral parameters required for the computation inEq. (4) were obtained from high rate phase data availablefor all stations of the ISACCO project. For more detailson the retrieval of the spectral parameters from the highrate data the reader is referred to Aquino et al. (2009).
In turn, according to Conker et al. (2003), the trackingerror variance at the output of the DLL (Delay LockedLoop) for the L1 C/A code is given (in C/A code chips) by:
r2DLL ¼ r2
/sCA; ð5Þ
where, r2/sCA
is the thermal noise variance for carrier CAand is given by:
r2/sCA¼
BnCAd 1þ 1
gðc=n0ÞL1�CAð1�2S24ðL1ÞÞ
h i2ðc=n0ÞL1�CAð1� S2
4ðL1ÞÞ; ð6Þ
where
Bn – one-sided noise bandwidth;d – correlator spacing;(c/n0)L1-C/A – fractional form of signal-to-noise densityratio, equal to 100.1C/N0;g – predetection integration time, equal to 0.02 s; modelvalid only for S4(L1) < 0.707; loss of lock is assumed forgreater values of S4.
4. Stochastic modelling for gps and mitigation of scintillation
effects
It is usual practice in GPS data processing, either in apoint positioning or in a relative mode, to assume thatthe observations to all of the satellites are independentand of the same quality (same variance). This assumptionis not always realistic, in particular because the precisionof the GPS observations can vary depending on the envi-ronmental conditions prevailing at the time of the survey.For instance, under active ionospheric conditions, theinfluence of ionospheric perturbations (e.g. scintillations)that can degrade measurement quality is not accounted for.
The usual GPS data processing strategy for the pointpositioning (navigation) solution considers a stochasticmodel based on a weight matrix (the inverse of the covari-ance matrix) that is given by:
W ¼
1=r2CA
s1r1
0 0 0
0 1=r2CA
s2r1
0 0
0 0 . ..
0
0 0 0 1=r2CAsn
r1
26666664
37777775
ð7Þ
where, r2CA
sir1
, the observable variance for the receiver r1 and
the satellite si, is assumed to be the same for all satellite/re-ceiver pairs. This simplifies the form of the weight matrixinto an identity matrix multiplied by a constant factorequal to the inverse of the adopted variance, common toall satellite/receiver pairs. This is referred here as the ‘stan-dard’ stochastic model. In this paper the approach of Aqui-no et al. (2009) is used to mitigate the effects of ionosphericscintillation, by redefining these variances based on thetracking errors of Section 3, so that each satellite/receiver
H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121 1115
Author's personal copy
link is assigned its own individual variance (and conse-quently its own weight, given by the inverse of the vari-ance). Crucially, for the case of an active ionospherethese weights will be sensitive to the influence of iono-spheric scintillation.
The same approach is applied to the relative positioningcase, where the Double Difference (DD), covariance matrixðR/
DDsb;sir1;r2
Þ, considering the base satellite method, is given by:
R/DD
sb; sir1;r2
¼
ðr2/
sbr1 ;r2
þ r2/
sir1 ;r2
Þ r2/
sbr1 ;r2
� � � r2/
sbr1 ;r2
r2/
sbr1 ;r2
ðr2/
sbr1 ;r2
þ r2/
siþ1r1 ;r2
Þ � � � r2/
sbr1 ;r2
..
. ... . .
. ...
r2/
sbr1 ;r2
r2/
sbr1 ;r2
� � � ðr2/
sbr1 ;r2
þ r2/sn
r1 ;r2
Þ
266666664
377777775ð8Þ
where, r2/
sbr1 ;r2
¼ r2/
sbr1
þ r2/
sbr2
and r2/
sir1 ;r2
¼ r2/
sir1
þ r2/
sir2
are the
propagated variances of the single difference combination.The components r2
/sbrj
and r2/
sirjðj ¼ 1; 2Þ are the observables
variances related, respectively, to measurements betweenreceiver rj and satellites sb (base satellite) and si (ith satel-lite). These variances are calculated as the variances ofthe output carrier tracking errors, according to Eq. (2).
5. Results and analyses
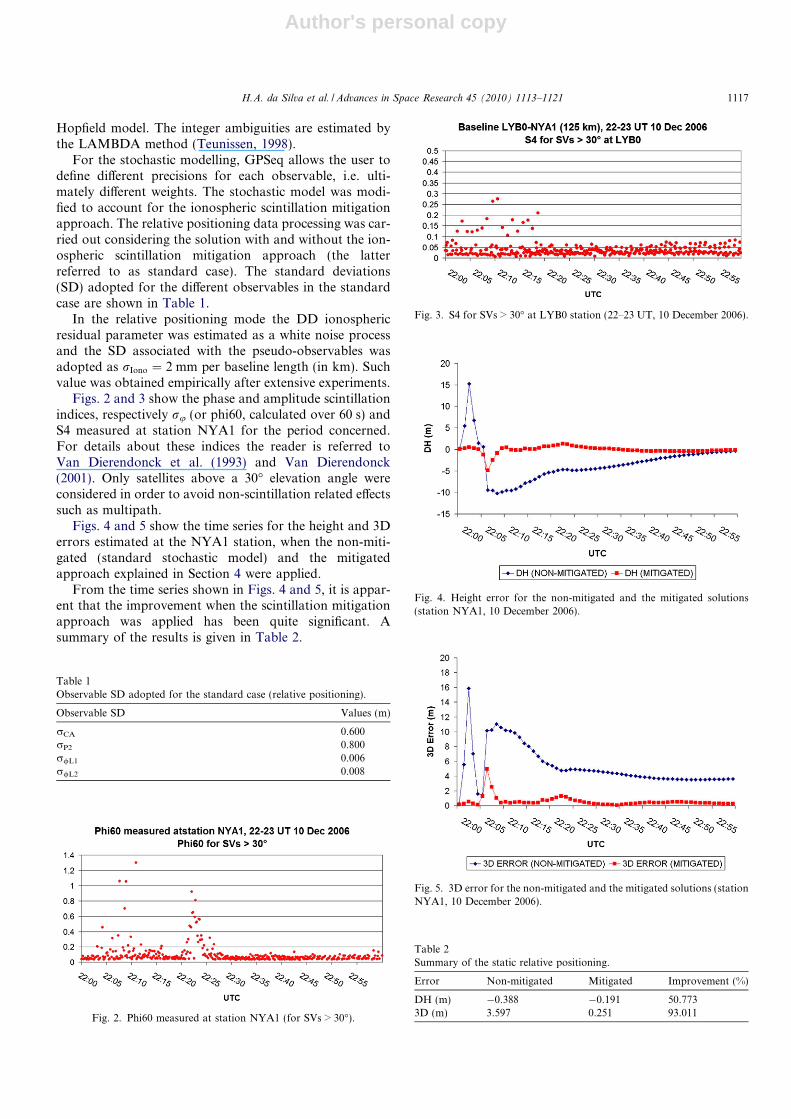
The experiments in this paper were based on data col-lected by two GISTMs receivers from the ISACCO project,
set up in Svalbard at stations LYB0 and NYA1 (Fig. 1).The data refers to 10 December 2006, during a 1-h periodbetween 22 and 23 UT. The baseline length between thesetwo stations is �125 km. This session corresponds to a per-iod of time where observed levels of scintillation in theregion were moderate to high. Solutions using the standardstochastic model (also referred to as ‘non-mitigated’) werecompared with those where the proposed mitigationapproach of Section 4 was applied to account for the effectsof ionospheric scintillation. The scintillation data requiredfor input in the models of Conker et al. (2003) wasobtained from the GISTM receivers.
5.1. Relative positioning
For the static relative positioning the GPSeq software(Section 1) was used. GPSeq allows GPS recursive dataprocessing using pseudoranges and carrier phase doubledifferences (DDs) simultaneously. Concerning the iono-sphere, the processing strategy was to estimate a DD iono-spheric parameter considering the original L1 and L2observables, as explained in Section 2. In this case, the ion-ospheric residual was estimated as a stochastic processusing the white noise correlation model and the introduc-tion of pseudo-observables with null values and associatedstandard deviation (Liu, 2001; Odijk, 2002). In the case ofthe troposphere (Eq. (1)), it was modelled using the
Fig. 1. Stations used in the experiments.
1116 H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121
Author's personal copy
Hopfield model. The integer ambiguities are estimated bythe LAMBDA method (Teunissen, 1998).
For the stochastic modelling, GPSeq allows the user todefine different precisions for each observable, i.e. ulti-mately different weights. The stochastic model was modi-fied to account for the ionospheric scintillation mitigationapproach. The relative positioning data processing was car-ried out considering the solution with and without the ion-ospheric scintillation mitigation approach (the latterreferred to as standard case). The standard deviations(SD) adopted for the different observables in the standardcase are shown in Table 1.
In the relative positioning mode the DD ionosphericresidual parameter was estimated as a white noise processand the SD associated with the pseudo-observables wasadopted as rIono ¼ 2 mm per baseline length (in km). Suchvalue was obtained empirically after extensive experiments.
Figs. 2 and 3 show the phase and amplitude scintillationindices, respectively ru (or phi60, calculated over 60 s) andS4 measured at station NYA1 for the period concerned.For details about these indices the reader is referred toVan Dierendonck et al. (1993) and Van Dierendonck(2001). Only satellites above a 30� elevation angle wereconsidered in order to avoid non-scintillation related effectssuch as multipath.
Figs. 4 and 5 show the time series for the height and 3Derrors estimated at the NYA1 station, when the non-miti-gated (standard stochastic model) and the mitigatedapproach explained in Section 4 were applied.
From the time series shown in Figs. 4 and 5, it is appar-ent that the improvement when the scintillation mitigationapproach was applied has been quite significant. Asummary of the results is given in Table 2.
Table 1Observable SD adopted for the standard case (relative positioning).
Observable SD Values (m)
rCA 0.600rP2 0.800r/L1 0.006r/L2 0.008
Fig. 2. Phi60 measured at station NYA1 (for SVs > 30�).
Fig. 3. S4 for SVs > 30� at LYB0 station (22–23 UT, 10 December 2006).
Fig. 4. Height error for the non-mitigated and the mitigated solutions(station NYA1, 10 December 2006).
Fig. 5. 3D error for the non-mitigated and the mitigated solutions (stationNYA1, 10 December 2006).
Table 2Summary of the static relative positioning.
Error Non-mitigated Mitigated Improvement (%)
DH (m) �0.388 �0.191 50.7733D (m) 3.597 0.251 93.011
H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121 1117
Author's personal copy
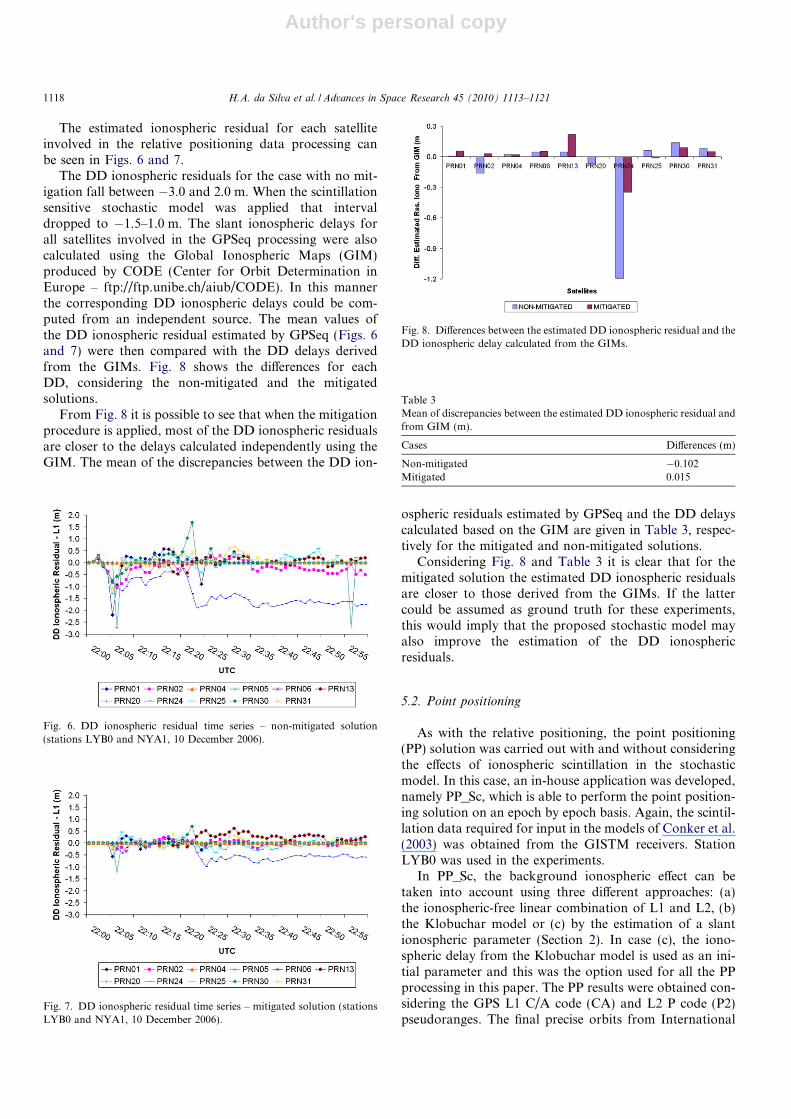
The estimated ionospheric residual for each satelliteinvolved in the relative positioning data processing canbe seen in Figs. 6 and 7.
The DD ionospheric residuals for the case with no mit-igation fall between �3.0 and 2.0 m. When the scintillationsensitive stochastic model was applied that intervaldropped to �1.5–1.0 m. The slant ionospheric delays forall satellites involved in the GPSeq processing were alsocalculated using the Global Ionospheric Maps (GIM)produced by CODE (Center for Orbit Determination inEurope – ftp://ftp.unibe.ch/aiub/CODE). In this mannerthe corresponding DD ionospheric delays could be com-puted from an independent source. The mean values ofthe DD ionospheric residual estimated by GPSeq (Figs. 6and 7) were then compared with the DD delays derivedfrom the GIMs. Fig. 8 shows the differences for eachDD, considering the non-mitigated and the mitigatedsolutions.
From Fig. 8 it is possible to see that when the mitigationprocedure is applied, most of the DD ionospheric residualsare closer to the delays calculated independently using theGIM. The mean of the discrepancies between the DD ion-
ospheric residuals estimated by GPSeq and the DD delayscalculated based on the GIM are given in Table 3, respec-tively for the mitigated and non-mitigated solutions.
Considering Fig. 8 and Table 3 it is clear that for themitigated solution the estimated DD ionospheric residualsare closer to those derived from the GIMs. If the lattercould be assumed as ground truth for these experiments,this would imply that the proposed stochastic model mayalso improve the estimation of the DD ionosphericresiduals.
5.2. Point positioning
As with the relative positioning, the point positioning(PP) solution was carried out with and without consideringthe effects of ionospheric scintillation in the stochasticmodel. In this case, an in-house application was developed,namely PP_Sc, which is able to perform the point position-ing solution on an epoch by epoch basis. Again, the scintil-lation data required for input in the models of Conker et al.(2003) was obtained from the GISTM receivers. StationLYB0 was used in the experiments.
In PP_Sc, the background ionospheric effect can betaken into account using three different approaches: (a)the ionospheric-free linear combination of L1 and L2, (b)the Klobuchar model or (c) by the estimation of a slantionospheric parameter (Section 2). In case (c), the iono-spheric delay from the Klobuchar model is used as an ini-tial parameter and this was the option used for all the PPprocessing in this paper. The PP results were obtained con-sidering the GPS L1 C/A code (CA) and L2 P code (P2)pseudoranges. The final precise orbits from International
Fig. 6. DD ionospheric residual time series – non-mitigated solution(stations LYB0 and NYA1, 10 December 2006).
Fig. 7. DD ionospheric residual time series – mitigated solution (stationsLYB0 and NYA1, 10 December 2006).
Fig. 8. Differences between the estimated DD ionospheric residual and theDD ionospheric delay calculated from the GIMs.
Table 3Mean of discrepancies between the estimated DD ionospheric residual andfrom GIM (m).
Cases Differences (m)
Non-mitigated �0.102Mitigated 0.015
1118 H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121
Author's personal copy
GNSS Service (IGS) (http://igscb.jpl.nasa.gov/compo-nents/prods_cb.html) were used in the data processing.
The a priori information regarding the standard devia-tion of the two observables used in the data processing isgiven in Table 4. The standard deviation associated withthe ionospheric pseudo-observable was rIono ¼ 0:1 m.
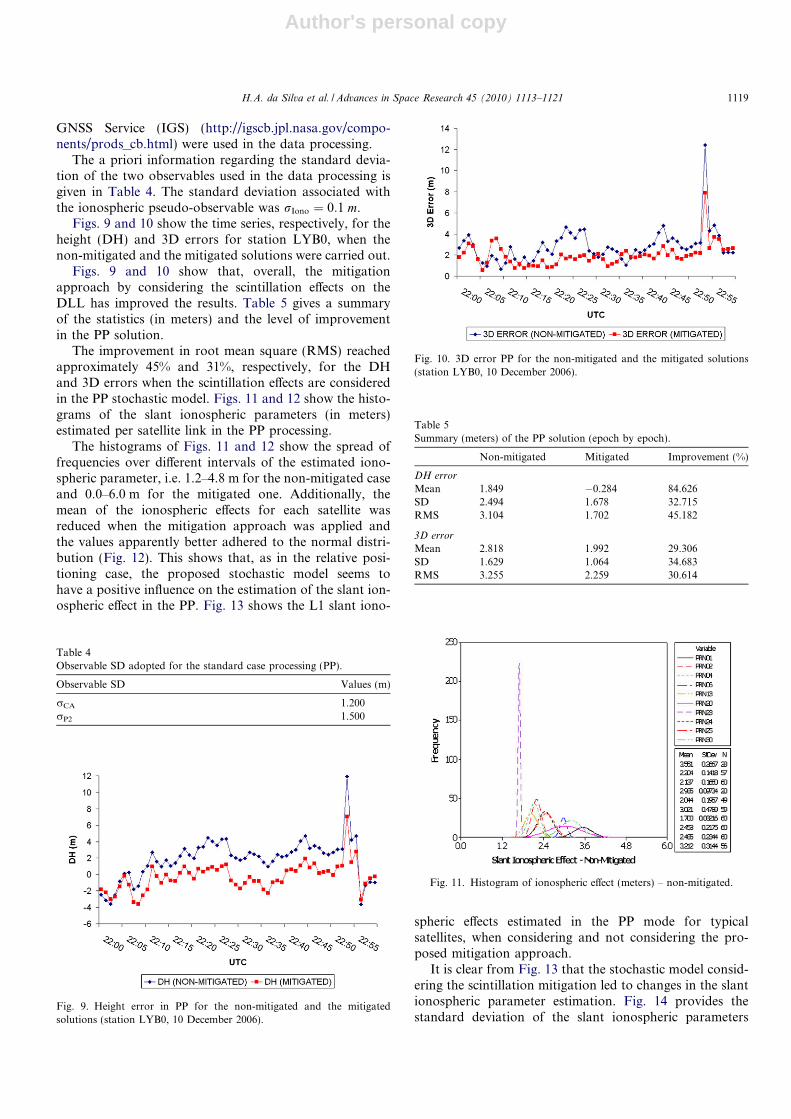
Figs. 9 and 10 show the time series, respectively, for theheight (DH) and 3D errors for station LYB0, when thenon-mitigated and the mitigated solutions were carried out.
Figs. 9 and 10 show that, overall, the mitigationapproach by considering the scintillation effects on theDLL has improved the results. Table 5 gives a summaryof the statistics (in meters) and the level of improvementin the PP solution.
The improvement in root mean square (RMS) reachedapproximately 45% and 31%, respectively, for the DHand 3D errors when the scintillation effects are consideredin the PP stochastic model. Figs. 11 and 12 show the histo-grams of the slant ionospheric parameters (in meters)estimated per satellite link in the PP processing.
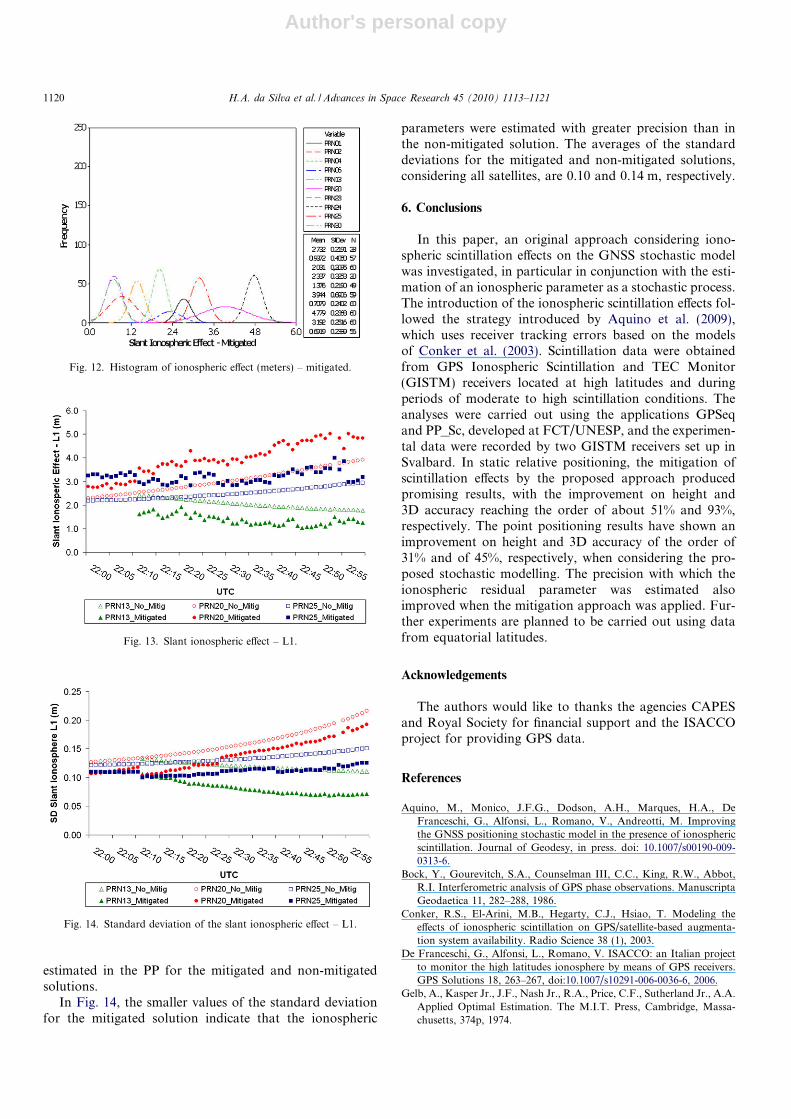
The histograms of Figs. 11 and 12 show the spread offrequencies over different intervals of the estimated iono-spheric parameter, i.e. 1.2–4.8 m for the non-mitigated caseand 0.0–6.0 m for the mitigated one. Additionally, themean of the ionospheric effects for each satellite wasreduced when the mitigation approach was applied andthe values apparently better adhered to the normal distri-bution (Fig. 12). This shows that, as in the relative posi-tioning case, the proposed stochastic model seems tohave a positive influence on the estimation of the slant ion-ospheric effect in the PP. Fig. 13 shows the L1 slant iono-
spheric effects estimated in the PP mode for typicalsatellites, when considering and not considering the pro-posed mitigation approach.
It is clear from Fig. 13 that the stochastic model consid-ering the scintillation mitigation led to changes in the slantionospheric parameter estimation. Fig. 14 provides thestandard deviation of the slant ionospheric parameters
Fig. 9. Height error in PP for the non-mitigated and the mitigatedsolutions (station LYB0, 10 December 2006).
Fig. 10. 3D error PP for the non-mitigated and the mitigated solutions(station LYB0, 10 December 2006).
Table 5Summary (meters) of the PP solution (epoch by epoch).
Non-mitigated Mitigated Improvement (%)
DH error
Mean 1.849 �0.284 84.626SD 2.494 1.678 32.715RMS 3.104 1.702 45.182
3D error
Mean 2.818 1.992 29.306SD 1.629 1.064 34.683RMS 3.255 2.259 30.614
Table 4Observable SD adopted for the standard case processing (PP).
Observable SD Values (m)
rCA 1.200rP2 1.500
Fig. 11. Histogram of ionospheric effect (meters) – non-mitigated.
H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121 1119
Author's personal copy
estimated in the PP for the mitigated and non-mitigatedsolutions.
In Fig. 14, the smaller values of the standard deviationfor the mitigated solution indicate that the ionospheric
parameters were estimated with greater precision than inthe non-mitigated solution. The averages of the standarddeviations for the mitigated and non-mitigated solutions,considering all satellites, are 0.10 and 0.14 m, respectively.
6. Conclusions
In this paper, an original approach considering iono-spheric scintillation effects on the GNSS stochastic modelwas investigated, in particular in conjunction with the esti-mation of an ionospheric parameter as a stochastic process.The introduction of the ionospheric scintillation effects fol-lowed the strategy introduced by Aquino et al. (2009),which uses receiver tracking errors based on the modelsof Conker et al. (2003). Scintillation data were obtainedfrom GPS Ionospheric Scintillation and TEC Monitor(GISTM) receivers located at high latitudes and duringperiods of moderate to high scintillation conditions. Theanalyses were carried out using the applications GPSeqand PP_Sc, developed at FCT/UNESP, and the experimen-tal data were recorded by two GISTM receivers set up inSvalbard. In static relative positioning, the mitigation ofscintillation effects by the proposed approach producedpromising results, with the improvement on height and3D accuracy reaching the order of about 51% and 93%,respectively. The point positioning results have shown animprovement on height and 3D accuracy of the order of31% and of 45%, respectively, when considering the pro-posed stochastic modelling. The precision with which theionospheric residual parameter was estimated alsoimproved when the mitigation approach was applied. Fur-ther experiments are planned to be carried out using datafrom equatorial latitudes.
Acknowledgements
The authors would like to thanks the agencies CAPESand Royal Society for financial support and the ISACCOproject for providing GPS data.
References
Aquino, M., Monico, J.F.G., Dodson, A.H., Marques, H.A., DeFranceschi, G., Alfonsi, L., Romano, V., Andreotti, M. Improvingthe GNSS positioning stochastic model in the presence of ionosphericscintillation. Journal of Geodesy, in press. doi: 10.1007/s00190-009-0313-6.
Bock, Y., Gourevitch, S.A., Counselman III, C.C., King, R.W., Abbot,R.I. Interferometric analysis of GPS phase observations. ManuscriptaGeodaetica 11, 282–288, 1986.
Conker, R.S., El-Arini, M.B., Hegarty, C.J., Hsiao, T. Modeling theeffects of ionospheric scintillation on GPS/satellite-based augmenta-tion system availability. Radio Science 38 (1), 2003.
De Franceschi, G., Alfonsi, L., Romano, V. ISACCO: an Italian projectto monitor the high latitudes ionosphere by means of GPS receivers.GPS Solutions 18, 263–267, doi:10.1007/s10291-006-0036-6, 2006.
Gelb, A., Kasper Jr., J.F., Nash Jr., R.A., Price, C.F., Sutherland Jr., A.A.Applied Optimal Estimation. The M.I.T. Press, Cambridge, Massa-chusetts, 374p, 1974.
Fig. 12. Histogram of ionospheric effect (meters) – mitigated.
Fig. 14. Standard deviation of the slant ionospheric effect – L1.
Fig. 13. Slant ionospheric effect – L1.
1120 H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121

Author's personal copy
Klobuchar, J.A. Ionospheric effects of GPS, in: Parkinson, B., Spilker, J.(Eds.), Global Positioning System: Theory and Applications. 4thPrinting, vol. 2. The American Institute of Aeronautics and Astro-nautics Inc. (Chapter 12), 1996.
Liu, G. C. Ionosphere Weighted Global Positioning System Carrier PhaseAmbiguity Resolution. M.Sc. Dissertation. Department of GeomaticsEngineering – The University of Calgary, Calgary, Alberta, Canada,2001.
Odijk, D. Fast Precise GPS Positioning in the Presence of IonosphericDelays. Ph.D. Dissertation. Faculty of Civil Engineering and Geosci-ences, Delft University of Technology, Delft, 2002.
Teunissen, P.J.G. GPS carrier ambiguity fixing concepts, in: Teunissen,P.J.G., Kleusberg, A. (Eds.), GPS for Geodesy, 2nd ed Springer-Verlag, Berlin, pp. 319–383, 1998.
Van Dierendonck, A.J. Measuring ionospheric scintillation effects fromGPS signals, in: Proceedings of 57th Annual Meeting of the Institute ofNavigation. Albuquerque, New Mexico, USA, pp. 391–396, 2001.
Van Dierendonck, A.J., Klobuchar, J., Hua, Q. Ionospheric scintillationmonitoring using commercial single frequency C/A code receivers, in:Proceedings ION GPS-93: Sixth International Technical Meeting ofthe Satellite Division of the Institute of Navigation. Salt Lake City,Utah, pp. 1333–1342, 1993.
H.A. da Silva et al. / Advances in Space Research 45 (2010) 1113–1121 1121
Related Documents











