Stiffness of mooring lines and performance of floating breakwater in three dimensions Eva Loukogeorgaki * , Demos C. Angelides Division of Hydraulics and Environmental Engineering, Department of Civil Engineering, Aristotle University of Thessaloniki, University Campus, Thessaloniki 54124, Greece Received 10 June 2005; received in revised form 1 December 2005; accepted 16 December 2005 Available online 10 March 2006 Abstract In the present paper, the performance of a moored floating breakwater under the action of normal incident waves is investigated in the frequency domain. A three-dimensional hydrodynamic model of the floating body is coupled with a static and dynamic model of the mooring lines, using an iterative procedure. The stiffness coefficients of the mooring lines in six degrees of freedom of the floating breakwater are derived based on the differential changes of mooring lines’ tensions caused by the static motions of the floating body. The model of the moored floating system is compared with experimental and numerical results of other investigators. An extensive parametric study is performed to investigate the effect of different configurations (length of mooring lines and draft) on the performance of the moored floating breakwater. The draft of the floating breakwater is changed through the appropriate modification of mooring lines’ length. Numerical results demonstrate the effects of the wave characteristics and mooring lines’ conditions (slack-taut). The existence of ‘optimum’ configuration of the moored floating breakwater in terms of wave elevation coefficients and mooring lines’ forces is clearly demonstrated, through a decision framework. q 2006 Elsevier Ltd. All rights reserved. Keywords: Coastal engineering; Floating breakwater; Mooring lines; Stiffness; Damping; Effectiveness; Performance; Decision framework 1. Introduction Floating breakwaters present an alternative solution to conventional fixed breakwaters and can be effectively used in coastal areas with mild wave environment conditions. Poor foundation or deep-water conditions as well as environmental requirements, such as phenomena of intense shore erosion, water quality and aesthetic considerations advocate the application of such structures. Floating breakwaters have many advantages compared to the fixed ones, e.g. absence of negative environmental impacts, flexibility of future exten- sions, mobility and relocation ability, lower cost and ability of a short time transportation and installation. As a result of all these positive effects, many types of floating breakwaters have been developed as described by McCartney [17]. However, the most commonly used type of floating breakwaters is the one that consists of rectangular pontoons connected to each other and moored to the sea bottom with cables or chains. A moored floating breakwater should be properly designed in order to ensure effective reduction of the transmitted energy and, therefore, adequate protection of the area behind the floating system. This design objective is subjected to the following constraints: (a) non-failure of the mooring lines and (b) non-failure of the floaters themselves and their inter- connections. The satisfaction of the above design objective and the corresponding constraints represents the overall effective performance of a moored floating breakwater. A brief review of the design process for floating breakwaters and the related design criteria, with respect to wave effects is provided by Isaacson [7]. Isaacson and Baldwin [8] provide a review of the analysis of moored floating structures in currents and waves, with an emphasis on moored floating breakwaters. With regard to the hydrodynamic analysis of the floating body, linear two-dimensional models describing the complete hydrodynamic problem (diffraction and radiation) have been developed by Isaacson and Nwogu [11], Isaacson [6], Isaacson and Bhat [9], Williams and Abul-Azm [23], Bhat and Isaacson [2], Sannasiraj et al. [20], Williams et al. [24] and Lee and Cho [14]. Most of these models are based on the finite element method (FEM) or the boundary integral equation method (BIEM) utilizing Green’s theorem, while Lee and Cho [14] use the element-free Galerkin method. Isaacson and Nwogu [11] Applied Ocean Research 27 (2005) 187–208 www.elsevier.com/locate/apor 0141-1187/$ - see front matter q 2006 Elsevier Ltd. All rights reserved. doi:10.1016/j.apor.2005.12.002 * Corresponding author. Tel.: C30 2310 995877; fax: C30 2310 995740. E-mail address: [email protected] (E. Loukogeorgaki).

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Stiffness of mooring lines and performance of floating
breakwater in three dimensions
Eva Loukogeorgaki *, Demos C. Angelides
Division of Hydraulics and Environmental Engineering, Department of Civil Engineering, Aristotle University of Thessaloniki,
University Campus, Thessaloniki 54124, Greece
Received 10 June 2005; received in revised form 1 December 2005; accepted 16 December 2005
Available online 10 March 2006
Abstract
In the present paper, the performance of a moored floating breakwater under the action of normal incident waves is investigated in the frequency
domain. A three-dimensional hydrodynamic model of the floating body is coupled with a static and dynamic model of the mooring lines, using an
iterative procedure. The stiffness coefficients of the mooring lines in six degrees of freedom of the floating breakwater are derived based on the
differential changes of mooring lines’ tensions caused by the static motions of the floating body. The model of the moored floating system is
compared with experimental and numerical results of other investigators. An extensive parametric study is performed to investigate the effect of
different configurations (length of mooring lines and draft) on the performance of the moored floating breakwater. The draft of the floating
breakwater is changed through the appropriate modification of mooring lines’ length. Numerical results demonstrate the effects of the wave
characteristics and mooring lines’ conditions (slack-taut). The existence of ‘optimum’ configuration of the moored floating breakwater in terms of
wave elevation coefficients and mooring lines’ forces is clearly demonstrated, through a decision framework.
q 2006 Elsevier Ltd. All rights reserved.
Keywords: Coastal engineering; Floating breakwater; Mooring lines; Stiffness; Damping; Effectiveness; Performance; Decision framework
1. Introduction
Floating breakwaters present an alternative solution to
conventional fixed breakwaters and can be effectively used in
coastal areas with mild wave environment conditions. Poor
foundation or deep-water conditions as well as environmental
requirements, such as phenomena of intense shore erosion,
water quality and aesthetic considerations advocate the
application of such structures. Floating breakwaters have
many advantages compared to the fixed ones, e.g. absence of
negative environmental impacts, flexibility of future exten-
sions, mobility and relocation ability, lower cost and ability of
a short time transportation and installation. As a result of all
these positive effects, many types of floating breakwaters have
been developed as described by McCartney [17]. However, the
most commonly used type of floating breakwaters is the one
that consists of rectangular pontoons connected to each other
and moored to the sea bottom with cables or chains.
0141-1187/$ - see front matter q 2006 Elsevier Ltd. All rights reserved.
doi:10.1016/j.apor.2005.12.002
* Corresponding author. Tel.: C30 2310 995877; fax: C30 2310 995740.
E-mail address: [email protected] (E. Loukogeorgaki).
A moored floating breakwater should be properly designed
in order to ensure effective reduction of the transmitted energy
and, therefore, adequate protection of the area behind the
floating system. This design objective is subjected to the
following constraints: (a) non-failure of the mooring lines and
(b) non-failure of the floaters themselves and their inter-
connections. The satisfaction of the above design objective and
the corresponding constraints represents the overall effective
performance of a moored floating breakwater.
A brief review of the design process for floating breakwaters
and the related design criteria, with respect to wave effects is
provided by Isaacson [7]. Isaacson and Baldwin [8] provide a
review of the analysis of moored floating structures in currents
and waves, with an emphasis on moored floating breakwaters.
With regard to the hydrodynamic analysis of the floating body,
linear two-dimensional models describing the complete
hydrodynamic problem (diffraction and radiation) have been
developed by Isaacson and Nwogu [11], Isaacson [6], Isaacson
and Bhat [9], Williams and Abul-Azm [23], Bhat and Isaacson
[2], Sannasiraj et al. [20], Williams et al. [24] and Lee and Cho
[14]. Most of these models are based on the finite element
method (FEM) or the boundary integral equation method
(BIEM) utilizing Green’s theorem, while Lee and Cho [14] use
the element-free Galerkin method. Isaacson and Nwogu [11]
Applied Ocean Research 27 (2005) 187–208
www.elsevier.com/locate/apor

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208188
and Bhat [1] properly modified a two-dimensional hydrodyn-
amic model in order to take into account the effect of finite
floating body length. Isaacson and Garceau [10] investigated
the response of a freely floating breakwater by superposing
two-dimensional solutions for the diffracted and radiated
waves and compared this simplified approach with three-
dimensional results. Three-dimensional analysis of a V-shaped
floating breakwater, moored in a three point mooring held by
buoys, has been implemented by Briggs et al. [3].
As far as the mooring lines, the effect of them on the
response of the floating breakwater is modeled through the
incorporation of the stiffness coefficients of the mooring lines
in the hydrodynamic model and the appropriate modification
of the hydrodynamic equations. Williams and Abul-Azm [23]
and Williams et al. [24] modified the hydrodynamic equations
by using appropriate values of the mooring lines’ stiffness
coefficients. On the contrary, Sannasiraj et al. [20] and Lee
and Cho [14] derived analytically the stiffness coefficients of
the mooring lines for taut and slack conditions, respectively,
using the basic catenary equation for the cable equilibrium.
However, in those investigations, the derivations of the
stiffness coefficients were restricted to two dimensions
(stiffness coefficients in sway, heave and roll modes only),
following the procedure given by Jain [12]; furthermore, it
was assumed that the stiffness components remain unaffected
by the motions of the structure, i.e. the stiffness values are
calculated at the initial equilibrium position. It should be also
noted that Sannasiraj et al. [20] conducted two-dimensional
experiments in order to validate their theoretical model. The
simplified approach of Jain [12] for the calculation of the
mooring lines’ stiffness coefficients has been also used by
Daghigh et al. [4], who investigated the effect of different
design aspects of the mooring lines on the dynamic behavior
of floating bridges and performed a parametric study in order
to select the optimum mooring lines’ condition in terms of the
horizontal forces on the mooring lines and the forces on the
anchor.
The non-linear behavior of the mooring lines was taken
into consideration by Bhat and Isaacson [2] by performing an
iterative coupled procedure between a hydrodynamic model
and a mooring analysis model in terms of convergence of the
steady drift forces only. An iterative coupling procedure was
also implemented by Loukogeorgaki and Angelides [16], who
studied the effect of mooring lines on the performance of
floating breakwaters in three dimensions. In that work, the
drag damping of the mooring lines was also taken into
account and, therefore, the convergence procedure was
implemented in terms of both the steady drift forces and
the response of the floating breakwater; furthermore, the
geometrical stiffness coefficients of the mooring lines on the
horizontal plane only, according to Triantafyllou et al. [22],
were taken into account. A similar geometric mooring lines’
stiffness matrix (3!3) has been also derived by Kreuzer and
Wilke [13], based on the modification of mooring lines
geometry, due to external wave loads, and on the correspond-
ing changes of mooring lines’ forces (not moments) in x, y
and z directions.
The objective of the present paper, where the dynamic
response and the protection effectiveness of a moored floating
breakwater is investigated in frequency domain under the
action of regular waves, is twofold. The first objective is the
integrated modeling and analysis of the dynamic behavior of
the moored floating breakwater in three dimensions. This is
achieved with a three-dimensional model of the hydrodynamic
analysis of the floating body coupled with a model of the static
and dynamic analysis of the mooring lines; an appropriate
iterative procedure is used, in terms of the steady drift forces
and the response of the floating breakwater. The floating body
analysis is based on three-dimensional panel method utilizing
Green’s theorem. With regard to the analysis of the mooring
lines, special attention is given to the computation of mooring
lines’ stiffness and drag damping imposed on the floating body.
Specifically, the derivation of the complete (6!6) stiffness
matrix of the mooring lines, which represents the second
objective of the present work, is implemented. The stiffness
coefficients of the mooring lines are derived in six degrees of
freedom, based on the differential changes of mooring lines’
tensions caused by the static motions of the floating body. This
enables the calculation of the stiffness of the floating structure
in its static mean position, under the action of the steady drift
forces. Finally, an extensive parametric study is performed in
order to investigate: (a) the performance of the moored floating
system for various wave conditions and various configurations
(length of the mooring lines and draft) of the floating
breakwater, and (b) the effect of the vertical stiffness of the
mooring lines on the dynamic behavior of the floating moored
system. Based on the results of this parametric study a Decision
Framework is introduced, which enables the selection of the
‘optimum’ configuration of the floating breakwater in terms of
the wave elevation coefficients and mooring lines’ forces.
2. Derivation of equations of mooring lines’ stiffness
coefficients
2.1. General assumptions—geometry definition
The excitation of second order steady drift forces on a
moored floating body results to static translational and
rotational displacements relatively to its initial equilibrium
position. These static displacements induce modifications of
the initial configuration of the mooring lines and consequently
they lead to changes of their static tensions. The final new
equilibrium position of the floating body depends on the
stiffness of the mooring lines, which is a function of
the changes of the static tensions of the mooring lines. In the
present formulation, the coefficients of the mooring lines’
stiffness matrix are assumed to depend on the floating body’s
static equilibrium position. Their derivation is implemented in
three dimensions and is based on the differential changes of the
static tension Tst and the static angle f at the top of the mooring
lines.
Fig. 1 shows the definition of some basic quantities that are
used in the present analysis. Three coordinate systems are
introduced. OXYZ (Fig. 1a) is the floating body coordinate

(ZP)
(a) (b)
θ
lY lx’
(XA ,YA)
lX
(XP ,YP)
O X
Y
Z
Tst
H
V z
o
l
lx’
lz’
x
lZ
(ZA) O X
Y
Z
X’
Z’
Zo
Xo
YoθX
θY
θZ
Ο’
Y’
ω
Fig. 1. (a) Coordinate systems—definitions of basic quantities. (b) Static displacements—displaced coordinate system.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 189
system at the initial (in the absence of any external static loads)
equilibrium position. Its origin O coincides with the center of
T Z
cos qY cos qZ sin qX sin qY cos qZKcos qX sin qZ cos qX
cos qY sin qZ sin qX sin qY sin qZ Ccos qX cos qZ cos qX
Ksin qY sin qX cos qY cos qX
264
ϕbot
Xa
o
H
VTst
ϕ
Xtot (=l x’)
L2
Ltot
L1
x
z
lz’
l
Fig. 2. Geometry of a mooring line
gravity of the floating body. O 0X 0Y 0Z 0 (Fig. 1b) is the floating
body coordinate system at the final, displaced due to the static
movements of the floating body, equilibrium position. Finally,
oxz (Fig. 1a) is defined as the local coordinate system of each
mooring line. The geometry of a typical mooring line is shown
in Fig. 2.
The translational and rotational displacement vector X of
the center of gravity of the floating body and the vector Fst
of the steady drift forces can be written, respectively, in form of
matrices as
XT Z Xo Yo Zo qX qY qZ
� �(1)
FTst Z FstX FstY FstZ MstX MstY MstZ
� �(2)
where Xo, Yo, Zo are the displacements of the center of gravity,
while qX, qY, qZ are the rotations of the floating body around the
axes X, Y and Z, respectively. In the same manner, FstX, FstY,
FstZ, MstX, MstY, MstZ are the steady drift forces and moments in
X, Y and Z directions, respectively.
The position vectors of the fairlead of the mooring line in
OXYZ and O 0X 0Y 0Z 0 coordinate systems are related to each
other by the following linear transformation
Uf ZTU0f CX0 (3)
where UTf Z[XP YP ZP] is the position vector of the fairlead of
the mooring line with respect to OXYZ, while (U0f )TZ
[XPO YPO ZPO] is the same position vector with respect to
O 0X 0Y 0Z 0. (X 0)TZ[Xo Yo Zo] is the translational displacement
vector. The matrix T is the rotational-transformation matrix,
which takes the form:
sin qY cos qz Csin qX sin qZ
sin qY sin qzKsin qX cos qZ
cos qY
375 (4)
The position of the anchor is assumed to be unaffected by
the static displacements of the floating body. Therefore, the
position vector of the anchor of each mooring line with respect
to OXYZ is defined as:
UTa Z XA YA ZA
� �(5)
As previously mentioned, the static displacements of the
floating body result to modifications of the initial geometry of
each mooring line, and consequently, to changes of its static

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208190
tension. Therefore, for a mooring line with specific character-
istics, i.e. submerged weight, total length, elasticity modulus,
effective diameter and initial pretension placed in a specific
water depth, any changes of its static tension Tst and of its static
angle f are considered to be a function of the length l of the
chord (see Figs. 1a and 2). Specifically
Tst Z TstðlðlX ;lY ;lZÞÞ (6)
fZfðlðlX ;lY ;lZÞÞ (7)
with laZla(Xo, Yo, Zo, qX, qY, qZ) and aZX or Y or Z.
In the above equations, lX, lY, lZ are the projection of the
length l of the chord in OXYZ. Based on the definitions in
Fig. 1a, the following relations hold for the projections of the
length l in oxz (Eq. (8)) and OXYZ (Eq. (9)) axes, respectively:
l0x
l0z
" #Z
XPKXA
ZPKZA
" #Z
l cos u
l sin u
" #(8)
lX
lY
lZ
264
375Z
XAKXP
YAKYP
ZAKZP
264
375ZK
l0xcos q
l0xsin q
l0z
2664
3775ZK
l cos u cos q
l cos u sin q
l sin u
264
375(9)� �
ðFmÞT Z ðfXÞm ðfY Þm ðfZÞm ðMXÞm ðMY Þm ðMZÞm 0
ðFmÞT Z ðH cos qÞm ðH sin qÞm ðVÞm ðMXÞm ðMY Þm ðMZ
�ðFmÞ
T Z ðT cos f cos qÞm ðT cos f sin qÞm ðT sin fÞm ðMX
�
2.2. Derivation of differential changes of l, u and q due tostatic displacements
The quantities l, u and q (see Fig. 1a) fully describe the
position of the fairlead relative to the anchor of each
mooring line in the static equilibrium position of the system
(floating body—mooring lines). Therefore, it is initially
required to derive the differential changes of these
quantities, due to the translational and rotational displace-
ments, before proceeding to the derivation of the mooring
lines’ stiffness coefficients.
The differential changes of l, u and q with respect to Xo, Yo,
Zo, qX, qY and qZ can be expressed in a matrix form as follows
vl
vXo
vl
vYo
vl
vZo
vu
vXo
vu
vYo
vu
vZo
vq
vXo
vq
vYo
vq
vZo
26666666664
37777777775Z
cosu cos q cosu sin q sinu
Ksinu cos q
lK
sinu sin q
l
cosu
l
Ksin q
l cosu
cos q
l cosu0
2666666664
3777777775(10a)
vl
vqi
vu
vqi
vq
vqi
26666666664
37777777775Z
kj cosu cos qCkm cosu sin qCkn sinu
kn cosuKkm sinu sin qKkj sinu cos q
l
km cos qKkj sin q
l cosu
2666666664
3777777775
(10b)
where iZ1 for qX, iZ2 for qY and iZ3 for qZ, jZ0, 3, 6, mZ1,
4, 7 and nZ2, 5, 8 for qX, qY and qZ, respectively. The terms kj,
km and kn are given by Eqs. (A1)–(A3) in Appendix A.
2.3. Derivation of the stiffness matrix of the mooring lines
The stiffness matrix Kij for a system of M mooring lines is
defined as
K ZXM
mZ1
Km ZXM
mZ1
KvFm
vX(11)
where Km is the stiffness matrix of mooring line m, X is the
translational and rotational vector as defined by Eq. (1). Fm is
the vector of the reaction forces and the corresponding reaction
moments that the mooring line m exercises on the floating
body:
Þm�0
Þm ðMY Þm ðMZÞm�
(12)
The moments (MX)m, (MY)m and (MZ)m are defined as the
cross product of the position vector r and the vector Fm using
Eq. (13)
ðMXÞm
ðMY Þm
ðMZÞm
264
375Zr!Fm Z
�����i j k
ðXPKXoÞm ðYPKYoÞm ðZPKZoÞm
ðH cos qÞm ðH sin qÞm ðVÞm
�����(13)
where ði, ðj, ðk are the unit vectors in X, Y, Z, respectively.
For a mooring line m each one of the coefficients Kmij
expresses the differential changes of the force or moment that is
exercised on the mooring line in the direction i due to the
differential translational or rotational static displacements of
the floating body in j direction. Thus, the coefficients Kmij will
be equal to the negative differential changes of the reaction
forces and moments on the floating body; this is expressed in
Eq. (11) by the minus sign.
Based on the above and on Eqs. (10a) and (10b), the
stiffness coefficients Kmij are derived. The detailed stiffness
equations are included in Appendix B (Eqs. (B1)–(B37)).
It should be mentioned that one of the main characteristics
of the matrix Km is that Kmij ZKm
ji for i, jZ1, 2, 6, i.e. the matrix
is symmetric for the differential changes of the forces (fX)m,
(fY)m and the moment (MZ)m of the mooring line in the
horizontal plane X–Y due to the horizontal static displacements

Fig. 3. Geometry of a moored floating breakwater and definition of basic
quantities.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 191
Xo, Yo and qZ. This is not observed for the rest of the off-
diagonal coefficients of the stiffness matrix. According to
Irvine [5], the catenary configuration of the mooring lines and
the existence of the sag introduce geometric non-linearity.
Therefore, the differential changes of the forces (fX)m, (fY)m and
the moment (MZ)m of the mooring line m in the horizontal plane
X–Y due to the static displacements Zo, qX and qY are different
than the differential changes of the force (fZ)m, and the
moments (MX)m, (MY)m of the mooring line m in the vertical
planes X–Z, Y–Z due to the static displacements Xo, Yo and qZ.
In the limiting case when the sag tends to zero, i.e. the
mooring lines become very taut and the lift-off length tends to
be equal to the length l of the chord, the effect of the geometric
non-linearity is negligible and the stiffness matrix Km becomes
fully symmetric [5]. This could be confirmed using the
equations that have been previously derived for the mooring
lines’ stiffness coefficients, by setting uZf.
2.4. Static equilibrium and numerical solution
The static configuration and the static tensions, forces and
angles of each mooring line are calculated using the equations
of the elastic catenary as described in Triantafyllou [21]. The
static configuration of a mooring line is described in its two-
dimensional vertical x–z plane. The differential changes dTst/dl
and df/dl depicted in the equations of (B1)–(B37) are then
calculated using the appropriate finite difference scheme.
Following the procedure as described by Triantafyllou et al.
[22], the new equilibrium position of the moored floating body
and the corresponding mooring lines’ stiffness coefficients at
this position can be determined by the solution of the following
system of equations
ðKKÞX ZKF ZKðFst CFmoorÞ0KFX
ZKðFst CFmoorÞ (14)
where Fmoor is the matrix of the net reaction forces and net
reaction moments that are exercised from the mooring lines on
the floating body at the new static position, Fst is defined in Eq.
(2) and KF is equal to KK. At this point, it should be
mentioned that Eq. (14) expresses the forces and displacements
that are exercised on the floating body. Therefore, matrix KF is
used in order to take into account the differential changes of the
reaction forces and moments that are exercised from the
mooring lines on the floating body.
The solution of Eq. (14) is implemented through an iterative
procedure until convergence is achieved in terms of the static
displacements of the moored floating structure [22].
3. Numerical models for the analysis of the performance
of a moored floating breakwater
The analysis of the performance of a moored floating
breakwater consists of two components: (a) the numerical
model of the hydrodynamic analysis of the floating body and
(b) the numerical model of the static and dynamic analysis of
the mooring lines. The geometry of a typical moored, single-
pontoon, rectangular-section floating breakwater and the
definition of some basic quantities that are used for its
hydrodynamic analysis are shown in Fig. 3. The coordinate
system OXYZ has been defined in Fig. 1a. It should be
mentioned that for the hydrodynamic analysis of the floating
body its origin is placed on the free water level.
In the following sections, the two components of the
analysis of the performance of a moored floating breakwater
are described.
3.1. Hydrodynamic analysis of the floating body
The hydrodynamic analysis of the floating body subjected to
regular waves is conducted in the frequency domain and is
based on a three-dimensional linear wave diffraction theory.
In this linear analysis, the floating breakwater is assumed to
undergo small oscillations in all six degrees of freedom
corresponding to surge (x1), sway (x2), heave (x3), roll (x4),
pitch (x5) and yaw (x6) as shown in Fig. 3.
The response of the floating body xj, jZ1,., 6 is given by
the solution of the following system of Eq. (15)
X6jZ1
Ku2ðMij CAijÞC iuðBij CBEijÞC ðCij CKijÞ
� �xj
ZFi; with i Z 1;.;6 (15)
where u is the wave excitation frequency, Mij are the
coefficients of the mass matrix of the body, Aij and Bij are the
coefficients of the added mass matrix and radiation damping
matrix, respectively, and Cij are the coefficients of the
hydrostatic and gravitational matrix. BEij are the coefficients
of the damping matrix caused by an external source (i.e. drag
damping of the mooring lines and viscous damping) and Kij are
the coefficients of the external stiffness matrix caused by the
mooring lines.
The coefficients Kij and BEij are imported in the model with
an iterative procedure described below. The coefficients BEij of
the external damping matrix include two components: the
damping coefficients BEðDÞij , due to the drag damping of the
mooring lines, and the damping coefficients BEðVÞij , due to
viscous damping attributed to the separation effects at the sharp
corners of the floating body. The BEðVÞij coefficients are

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208192
determined using the following empirical relationship
BEðVÞij Z 2z
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðMij CAijÞCij
p; with i Z j Z 3;4;5 (16)
where z is the damping ratio. According to Bhat [1], a value of
z equal to 2.5% is the most representative in the case of a
rectangular floating breakwater.
The solution of the boundary value problem is based on the
three-dimensional panel method utilizing Green’s theorem
with the appropriate boundary conditions as described by Lee
and Newman [15] and Newman [19]. The steady drift forces
are determined using the momentum conservation [18].
The response of the floating body in each degree of freedom
is expressed in terms of the response amplitude operator (Eq.
(17))
RAOj Zxj
A; with j Z 1;.;6 (17)
where A is the amplitude of the incident wave.
The effectiveness of the floating breakwater is expressed in
terms of the wave elevation coefficients in front, Kf, and
behind, Kb, the floating breakwater. These coefficients vary
with the location (X, Y) and are given by the following Eq. (18)
Kf ZhðX;YÞ
Afor Y!0 Kb Z
hðX;YÞ
Afor YO0 (18)
where h(X, Y) is the wave elevation at (X, Y) due to diffracted
and radiated waves.
More details of the hydrodynamic model are given in
Loukogeorgaki and Angelides [16].
3.2. Static and dynamic analysis of the mooring lines
The static analysis of the mooring lines includes the
determination of: (a) the initial static configuration of the
mooring lines under the action of the initial pretension and
in the absence of any external loads (initial equilibrium
position) as well as the corresponding static tensions; (b) the
new position (steady offset) of the moored system as
defined through the displacement vector XT (Eq. (1)) under
the action of wave and current induced steady drift forces,
and the corresponding net forces and net moments that are
exercised on the floating body by the mooring lines (at the
initial equilibrium position these forces and moments are
equal to zero in case of symmetry of the mooring lines); (c)
the static configuration and the static tensions of the
mooring lines at the new position; and (d) the coefficients
Kij due to the changes of the static tensions of the mooring
lines resulting from the displacements due to the external
static loads. The mooring lines’ stiffness coefficients are
calculated using Eqs. (B1)–(B37) and they represent a full
6!6 matrix.
XC Z
x1cosða1ÞKx6cosða6ÞYP Cx5cosða5ÞZP x1sinða1ÞKx6sin
x2cosða2ÞCx6cosða6ÞXPKx4cosða4ÞZP x2sinða2ÞCx6sin
x3cosða3ÞKx5cosða5ÞXP Cx4cosða4ÞYP x3sinða3ÞKx5sin
264
The steady drift forces are calculated in the hydrodynamic
model using the momentum conservation. Consequently, the
vector Fst of the steady drift forces (Eq. (2)), as well as the
translational and rotational displacement vector X of the center
of gravity of the floating body (Eq. (1)) include only the
horizontal components, i.e. FstX, FstY, MstZ and Xo, Yo, qZ,
respectively. The rest elements ofFst andX are set equal to zero.
Additionally, the projection of the length l of the chord on
Z-axis lZ is not modified due to the absence of vertical
translational and rotational displacements. Therefore, Eqs. (6)
and (7) are simplified as follows
Tst Z TstðlðlX ;lY ÞÞ (19)
fZfðlðlX ;lY ÞÞ (20)
with laZla(Xo, Yo, qZ) and aZX or Y.
Finally, the simplified Eqs. (A4)–(A6) are used for the terms
kj (jZ0,3,6,) km (mZ1,4,7) and kn (nZ2,5,8).
The dynamic analysis of the mooring lines enables the
calculation of: (a) the dynamic tensions Tdyn at the new
equilibrium position and (b) the determination of the damping
coefficients BEðDÞij .
The dynamic tensions are calculated assuming that a
sinusoidal excitation, resulting from the motions of the floating
body, is imposed on the fairlead of each mooring line at the new
static equilibrium position. Detailed description of the
determination of the dynamic tensions can be found in
Triantafyllou [21] and Triantafyllou et al. [22]. With regard to
the drag damping coefficients, these are obtained by linearizing
the hydrodynamic drag force using an equivalent linearization
technique for the case of a harmonic excitation [22].
Generally, the damping coefficients BEðDÞij of a mooring line
are defined as the ratio of the reaction force or moment in
direction i, due to a motion xj and in phase with the velocity _xi,
to the velocity _xj. In this work, the coefficients BEðDÞij with iZj
are calculated, while the ones with isj are assumed equal to
zero. Initially, the complex motion amplitudes xd, zd of the top
of each mooring line at the new static equilibrium position are
calculated in the x, z directions of the local coordinate system
oxz of the mooring lines, due to the sinusoidal motions (RAOj,
jZ1,., 6) of the floating body; also the resulting dynamic
tensions and angles are calculated. Small rotations are
assumed.
The real and imaginary parts of the motion amplitudes of the
top of a mooring line due to the motions of the floating body
can be written in a matrix form in the global coordinate system
as
XC Z
XCR XCI
YCR YCI
ZCR ZCI
264
3750
ða6ÞYP Cx5sinða5ÞZP
ða6ÞXPKx4sinða4ÞZP
ða5ÞXP Cx4sinða4ÞYP
375 (21)

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 193
where xj are the amplitudes of the sinusoidal motions RAOj and
aj is the phase of the motion xj.
The real and imaginary parts of the complex motions xd, zdof a mooring line can be then determined by analyzing the
elements of matrix XC in the oxz plane and are defined as
Q ZQXR QXI
QZR QZI
" #
ZXCRcosðqfÞCYCRsinðqfÞ XCIcosðqfÞCYCIsinðqfÞ
ZCR ZCI
" #
(22)
where qf is the angle of each mooring line on X–Y at the new
static equilibrium position.
Consequently, the amplitudes xd, zd are:
xd ZffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiQ2
XR CQ2XI
qzd Z
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiQ2
ZR CQ2ZI
q(23)
The terminal impedances Sxx, Sxz, Szx, Szz of a mooring line
can be defined in the following way [22]
Sxx Sxz
Szx Szz
" #$
xd
zd
� �Z
Fx
Fz
" #(24)
where Fx, Fz are the excitation forces in x, z directions. The real
and imaginary parts of the terminal impedances are next
evaluated as functions of the static and the dynamic tension and
angle at the top of each mooring line [22]. Then, the above
quantities are properly analyzed in the X, Y, Z directions in the
OXYZ coordinate system resulting to complex reaction forces,
Sxdi, Szdi iZ1,2,3 and moments Sxdi, Szdi iZ4,5,6 at and around
the corresponding axes. The subscripts xd and zd denotes
forces and moments due to the amplitudes xd and zd,
respectively. For Sxdi iZ1,., 6 we have
SxdZ
SRxd1 SI
xd1
SRxd2 SI
xd2
SRxd3 SI
xd3
SRxd4 SI
xd4
SRxd5 SI
xd5
SRxd6 SI
xd6
2666666666664
3777777777775
Z
SRxxcosðqfÞ SI
xxcosðqfÞ
SRxxsinðqfÞ SI
xxsinðqfÞ
SRzx SI
zx
SRxxsinðqfÞZPKSR
zxYP SIxxsinðqfÞZPKSI
zxYP
SRzxXPKSR
xxcosðqfÞZP SIzxXPKSI
xxcosðqfÞZP
SRxxsinðqfÞXPKSR
xxcosðqfÞYP SIxxsinðqfÞXPKSI
xxcosðqfÞYP
2666666666664
3777777777775
(25)
where R and I denote real and imaginary parts. The same holds for
Szdi by replacing in Eq. (25) SRxx, SR
zx, SIxx and SIzx with SR
xz, SRzz, SIxz and
SIzz, respectively.
Finally, the amplitudes of the reaction forces Si, iZ1,., 6
and the phases bi of them are defined as follows:
Si ZffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiSRxdi CSR
zdi
� �2C SI
xdi CSIzdi
� �2qwith i Z 1;.;6 (26)
bi Z tanK1 SIxdi CSI
zdi
SRxdi CSR
zdi
with i Z 1;.;6 (27)
The reaction forces and moments Si that are in phase with
the velocity _xi are used to evaluate the damping coefficients.
The procedure described above is repeated for each mooring
line and the final damping coefficients BEðDÞij that are used in the
hydrodynamic model are equal to the sum of all mooring lines’
damping coefficients. The final relations for the calculation of
the coefficients BEðDÞij are
BEðDÞij Z
XM
mZ1
j Smi $cosðb
mi KajKp=2Þ
� �j
u$xj
; i Z j Z 1;.;6
(28)
where Smi is the amplitude of the dynamic reaction force or
moment of mooring line m and bmi is the phase of Sm
i .
3.3. Iterative coupling procedure
The two previously presented numerical models are coupled
using an iterative procedure shown in Fig. 4 as described by
Loukogeorgaki and Angelides [16]. In the first cycle of
iterations, the hydrodynamic analysis of the floating body is
conducted assuming that Kij and BEij are equal to zero. The
steady drift forces F1st (FstX, FstY and MstZ) and the RAO1
j are
calculated and then imported in the static and dynamic analysis
model of the mooring lines. Next, the coefficients K1ij and BEðDÞ1
ij
are evaluated in the mooring lines’ model and are then
imported in the hydrodynamic model of the floating body,
starting the second cycle of iterations. The coefficients BEðVÞij
are also imported in the hydrodynamic model at this stage of
the iteration cycles. Eq. (15) is modified and new RAO2j and
consequently new steady drift forces F2st are calculated. The
procedure is repeated until convergence is achieved in terms of
the following convergence criteria (Eqs. (29) and (30))
FNstKFNK1
st %10K4 (29)
RAONj KRAONK1
j %10K4 (30)
where N is the number of iteration cycles.
The final values of FNst and RAO
Nj are imported once more in
the mooring lines’ static and dynamic model to calculate the
final steady offset of the fairleads of the mooring lines and the
final static and dynamic tensions of the mooring lines.
Additionally, the values of the wave elevation coefficients
are calculated with the hydrodynamic model.
4. Comparison with experimental and theoretical results
The numerical models described above are compared to the
experimental and the numerical results of Sannasiraj et al. [20]

Fig. 4. Iterative coupling procedure [16].
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208194
and the numerical results of Lee and Cho [14]. The
experiments of Sannasiraj et al. [20] refer to the case of a
floating breakwater with a single rectangular-section pontoon
moored with four mooring lines as shown in Fig. 3. The length
Lf and the width B of the floating breakwater are equal to 3.78
and 0.4 m, respectively, while its draft dr is equal to 0.1 m. The
lift-off length L1 of each mooring line is fixed at twice the water
depth, i.e. L1Z4.7 m, while the initial angle q of each mooring
line on the X–Y plane, with respect to the X-axis, is 908. The
water depth d is equal to 2.35 m. The regular wave height H is
equal to 0.05 m, while the frequency range is 0.3–1.5 Hz. The
wave direction is normal to the longitudinal dimension Lf of the
floating breakwater, i.e. bZ908 (Fig. 3).
The numerical model of Sannasiraj et al. [20] is based on
finite element method (FEM), while Lee and Cho [14] use the
element-free Galerkin method (EFGM). Both numerical
models are two-dimensional. Additionally, a basic assumption
in both models is that the stiffness coefficients of the mooring
lines remain unaffected by the motions of the floating structure
and the stiffness values are calculated at the initial equilibrium
position.
At this point, it should be noted that the conditions of the
experiment, i.e. the small amplitude of the incident regular
wave, result to small values of the steady drift forces and
consequently, to an almost unaffected initial equilibrium
position of the floating breakwater for the frequency range
examined. Therefore, the stiffness coefficients (Eqs. (B1)–
(B37)) were also computed at the initial equilibrium position;
however, a few number of iterations was required in order to
accommodate for the drag damping of the mooring lines.
Fig. 5 shows the comparison of the computed RAOj, jZ2, 3,
4 in sway, heave and roll, as a function of the normalized wave
frequency u2B/2g, with the numerical and experimental results
of Sannasiraj et al. [20] and the numerical results of Lee and
Cho [14]. For the case of sway response (Fig. 5a) the results of
the present numerical model are in a very good agreement with
the corresponding experimental ones. At around u2B/2gZ0.4 a
rapid increase of the values of the computed RAO2 is observed,
that coincides with the corresponding experimental value at
this frequency. The occurrence of this rapid increase is
attributed to the strong coupling between sway and roll
which is introduced by the mooring lines and the occurrence of
roll resonance at this frequency range (see Fig. 5c).
With regard to heave response (Fig. 5b), the computed
values of RAO3 for u2B/2g between 0.5 and 1.0 are lower than
the ones of the other two numerical models; however, they are
closer to the experimental values of RAO3. The inclusion of
viscous damping BEðVÞij and mooring lines’ drag damping BEðDÞ
ij
in the present numerical models explains these differences.
Similarly, the computed values of RAO4 (Fig. 5c) are closer to
the experimental values than the results of the other two
numerical models, while resonance is observed at a bit higher
u2B/2g value.
5. Results and discussion
The two numerical models and the iterative coupling
procedure (Fig. 4) described above are used to perform an
extensive parametric study; the purpose is to investigate the
performance of a moored floating breakwater for various wave
conditions and various configurations (length of the mooring
lines and draft) of the floating breakwater. The modification of
the initial configuration of the floating breakwater through the
procedure described below, results to modifications of the
stiffness and the damping of the mooring lines that affect
directly the performance of the floating breakwater. The results

0
0.5
1
1.5
2
2.5
RA
O4(
rad/
m)
RA
O3(
m/m
)
RA
O2(
m/m
)
(a)
(c)
(b)FEM (San.)Experiment(San.)EFGM(Lee)Present
0
0.2
0.4
0.6
0.8
1
1.2
1.4FEM (San.)Experiment(San.)EFGM(Lee)Present
0 0.5 1 1.5 2
0 0.5 1 1.5 20 0.5 1 1.5 2
0
5
10
15
20
25
30
35
40
ω2B/2g
ω2B/2gω2B/2g
FEM (San.)Experiment(San.)EFGM(Lee)Present
Fig. 5. Comparison of computed RAOj (jZ2, 3, 4) as a function of u2B/2g.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 195
of this parametric investigation are compared with the
corresponding ones of the parametric work presented in
Loukogeorgaki and Angelides [16]. The application of Eqs.
(B1)–(B37) for the determination of mooring lines stiffness
coefficients and, therefore, the inclusion of the effect of the
stiffness of the mooring lines in the vertical planes X–Z and Y–Z
represents the major differences between the two parametric
investigations.
A floating breakwater with characteristics LfZ20 m, BZ4 m, HfZ1.5 m and dr1Z0.77 m is used as the ‘base case’ for
this study. The floating breakwater is anchored to the seabed
through a symmetric mooring system, which consists of four
identical mooring lines as shown in Fig. 3. Their submerged
weight is equal to 191.25 N/m, their breaking tension Tbreak is
equal to 400 kN, while the product of elasticity modulus E
with the effective cross sectional area A is equal to 342!103 kN. The initial angle q of each mooring line on the X–Y
plane, with respect to the X-axis, is 458. The water depth is
equal to dZ10 m. The incident wave angle b is taken equal to
908. This normal wave direction results to floating break-
water’s motions only in three degrees of freedom, i.e. sway,
heave and roll. Nineteen wave frequencies were totally
examined, so that the beam to wavelength ratio (B/L) varies
from 0.1 to 1.5.
Modification of the initial configuration (initial Ltot and
consequently dr) of the ‘base case’ floating breakwater is
achieved through the reduction of the initial mooring lines’
total length Ltot, which leads to a simultaneous increase of the
initial draft of the ‘base case’, and therefore, to the increase of
the initial buoyancy exercised on the floating breakwater [16].
This additional buoyancy should be picked up by the mooring
lines. Consequently, mooring lines undergo modifications in
their initial static configuration, as well as stretching, which
lead to larger initial pretension and larger stiffness of the
mooring lines, as well as to different drag damping coefficients.
Based on the above procedure four configurations, Ci, were
examined as shown in Table 1. This table contains, also, the
values of the quantities (Ltot, L1, L2) that have been properly
modified to achieve the respective configurations, as well as the
values of the quantities (dr, additional buoyancy, V, H, Tst
and f) that are affected by the changes of the initial total length
of the mooring lines.
The modification of the initial static configuration of the
mooring lines through the procedure described above enables
the transition from the slack to the taut condition of the
mooring lines and the investigation of the effect of these
conditions on the performance of the floating breakwater.
Configuration 1 corresponds to the slack condition of the

Table 1
Characteristics of cases examined
Configuration
no. (Ci)
dri (m) Ltoti (m) L1i (m) L2i (m) DLi (m)a Additional
buoyancy (kN)
Additional
V (kN)bH (kN)b Tst (kN) f (8)
C1 (base case) 0.77 30 20 10 0 0 0 3.27 5.03 49.6
C2 0.78 28.98 28.98 0 1.02 8.04 2.01 8.74 10.51 33.7
C3 0.80 28.66 28.66 0 1.34 24.12 6.03 20.83 23.05 25.3
C4 0.85 28.59 28.59 0 1.41 64.33 16.08 50.77 54.54 21.4
a DLiZLtot(base case)KLtoti.b Under pretension conditions and in the absence of any external static loads.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208196
mooring lines where the initial static angle is fbotZ0 and the
initial length on the bottom is L2s0. On the contrary,
configurations 3 and 4 correspond to the taut condition of the
mooring lines where fbots0 and L2Z0. Configuration 2
represents the limiting case where fbot as well as L2 are equal to
zero.
5.1. Mooring lines stiffness and drag damping
Figs. 6 and 7 show the variation of the non-dimensional
stiffness coefficients K22, K33, K44 and K23 (K32) for the various
configurations examined, as a function of the non-dimensional
ratio B/L, where L is the wavelength. Fig. 6b and c contain also
the variation of the non-dimensional coefficients C33 and C44
due to hydrostatic and gravitational forces.
The variation of the stiffness coefficients with B/L for a
specific configuration is attributed to the variation of the steady
drift forces with B/L, which affects the final static equilibrium
position of the floating breakwater. Furthermore, the values of
these coefficients increase as draft increases for each B/L,
0 0.5 1 1.50
0.5
1
1.5
B/L
K22
/(ρg
Lf2 )
0 0.50
0.2
0.4
0.6
0.8
1
1.2
B/L
K44
/(ρg
Lf4 )
x 10-2
x 10-3
C3: Scale values x 10C4: Scale values x 100
(a)
C4: Scale values x 1
(c)
Fig. 6. Stiffness coefficients as a function o
especially for configurations C3 and C4, which correspond to
the taut condition of the mooring lines. With regard to the
comparison of the stiffness coefficients K33, K44 with the
corresponding ones due to hydrostatic and gravitational forces
(Fig. 6b and c), for the configurations C1 and C2 the values of
K33 and K44 are much lower than the values of C33 and C44.
This is not observed for the cases of C3 and C4, where the
coefficients K33 and K44 have either larger values than the
corresponding ones of C33 and C44 or lower but comparable
values with them. Therefore, it is concluded that, as the draft
increases and the configuration of the mooring lines is modified
from the slack to the taut condition, the stiffness on the vertical
planes of the mooring lines affects more significantly the
overall vertical stiffness of the floating breakwater.
It should be noted that the combination of all the above
results leads to the conclusion that the transition from the slack
to the taut condition modifies the system of the floating
breakwater to a stiffer one. Additionally, the values of C33 for
all the configurations examined differ slightly; the same holds
for the values of C44. This is attributed to the rather small
0 0.5 1 1.50
1
2
3
3.5
B/L
K33
/ρgL
f2 )
1 1.5
C1C2C3C4C1BC2BC3BC4B*
x 10-3
C3: Scale values x 10C4: Scale values x 100C
33 for all Ci: Scale values x 100
0
(b)
*B denotes buoynacy
f B/L for the configurations examined.

0 0.5 1 1.5–20
–15
–10
–5
0
5x 10–4
B/L
K23
(K32
)/(ρ
gLf)
C1K23
C1K32
C2K23
C2K32
C3K23
C3K32
C4K23
C4K32
C3, C4: Scale values x 100
2
Fig. 7. K23 and K32 as a function of B/L for the configurations examined.
0 0.5 1 1.5
C1C2
C1C2
0
1
2
3
4
5x 10–3
0 0.5 1 1.50
0.1
0.2
0.3
0.4
B/L
B33
/(
ρLf ω
)E
(D)
3 B
33
/(ρL
f ω)
E(D
)3
Fig. 9. BEðDÞ33 as a function of B/L for the configurations examined.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 197
increase of the draft compared to the ‘base case’. Conse-
quently, any modifications of the dynamic behavior of the
moored floating breakwater for the various configurations
should be primarily considered as an effect of the mooring lines
stiffness and drag damping.
Finally, Fig. 7 shows the variation of the off-diagonal terms
K23 and K32. It is obvious that as the draft increases the values
of K23 and K32 tend to become equal, i.e. the stiffness matrix of
the mooring lines tends to become symmetric. The same holds
for the rest of the off-diagonal terms. This is expected because
the increase of the draft follows the decrease of the total length
of the mooring lines Ltot that also leads to more taut mooring
lines. The above fact is in absolute accordance with one of our
previous statements that when the mooring lines become very
taut and the lift-off length tends to be equal to the length l of the
chord, the effect of the geometric non-linearity is negligible
and the stiffness matrix K becomes fully symmetric.
The variation of mooring lines’ drag damping is shown in
Figs. 8–10. This damping depends upon the response of the
C1C2
C1C2
0
2
4
6
8
0
0.005
0.01
0.015
0.02
0.025
B22
/(
ρLfω
)
0 0.5 1 1.5
0 0.5 1 1.5B/L
x 10–4
E(D
)3
B22
/(
ρLfω
)E
(D)
3
Fig. 8. BEðDÞ22 as a function of B/L for the configurations examined.
floating body. Furthermore, the terminal impedances, which
are used to calculate the damping coefficients, depend on both
the Tst and the Tdyn. Therefore, the explanation of the damping
variations has to be based on the variation of the response
quantities and the variation of the tensions of the mooring lines
presented in Sections 5.2 and 5.3, respectively. The variation of
the coefficient BEðDÞ22 (Fig. 8) is discussed in detail below, while
similar considerations can be used to explain the variation of
BEðDÞ33 and BEðDÞ
44 .
Specifically, the occurrence of roll resonance at B/LZ0.3
for C1 and at B/LZ0.4 for C2 (see Fig. 13) does not result to an
increase of BEðDÞ22 for these configurations although Tdyn
increases (see Fig. 14). This is attributed to the phase difference
ðbmi KajKp=2Þ that tends to p/2 at these B/L values, and
consequently, results to the decrease of BEðDÞ22 . The peak value at
B/LZ0.4 for C1 is attributed to the fact that Sxd2 and Szd2 are
B 44E(D
) /( ρL f5
)
B 44E(D
) /( ρω
ωL f5
)
C1C2
C1C2
0 0.5 1 1.5
0 0.5 1 1.5
B/L
0
2
4
6x 10–5
0
1
2
3x 10–4
Fig. 10. BEðDÞ44 as a function of B/L for the configurations examined.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208198
close in phase leading to larger value of BEðDÞ22 compared to the
one at B/LZ0.3. The same holds at B/LZ0.85 and B/LZ0.9.
The increase of BEðDÞ22 for C2 at B/LZ0.3 is attributed to heave
resonance (see Fig. 12). For the case of C3, a very small
increase of the value of BEðDÞ22 is observed at B/LZ0.8 where
roll resonance occurs. As far as the configuration C4, the small
increase of BEðDÞ22 at B/LZ0.4, as well as at B/LZ1.2 and 1.3 are
attributed to the decrease of the sway velocity.
Finally, it should be noted that as the draft increases, the
damping coefficients increase, which is expected, as the
floating system becomes stiffer and the mooring lines have
larger Tst (see Fig. 14), resulting to larger terminal impedances
Sxx, Sxz, Szx, Szz.
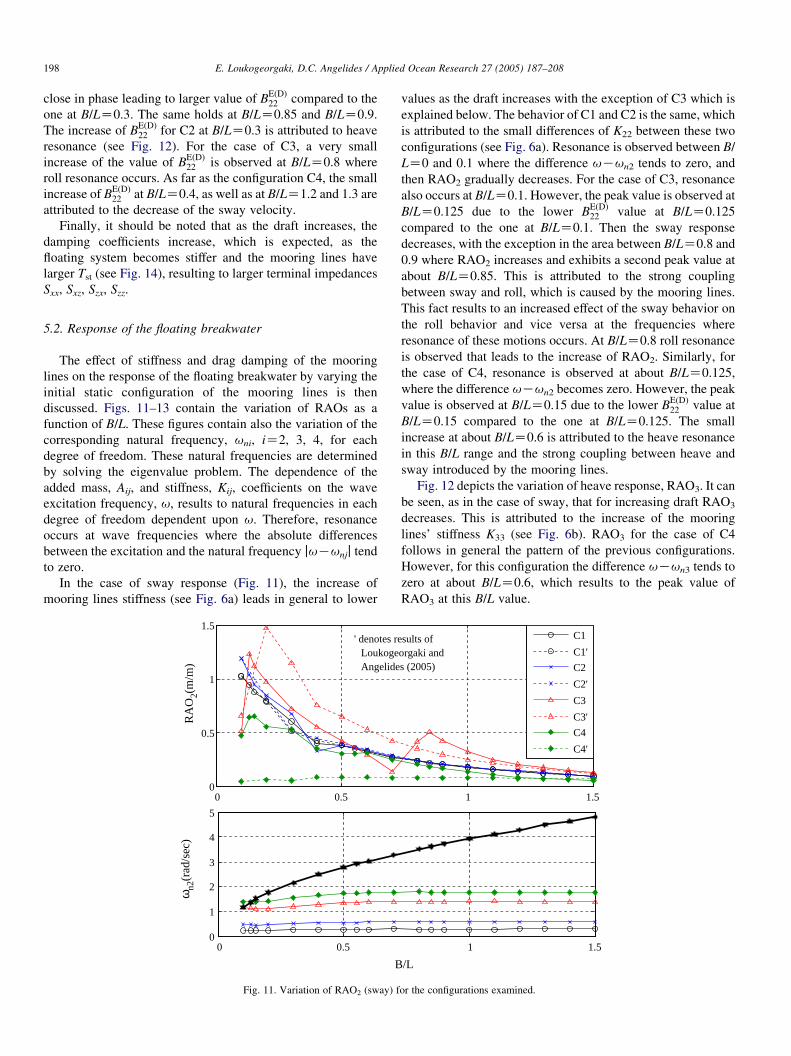
5.2. Response of the floating breakwater
The effect of stiffness and drag damping of the mooring
lines on the response of the floating breakwater by varying the
initial static configuration of the mooring lines is then
discussed. Figs. 11–13 contain the variation of RAOs as a
function of B/L. These figures contain also the variation of the
corresponding natural frequency, uni, iZ2, 3, 4, for each
degree of freedom. These natural frequencies are determined
by solving the eigenvalue problem. The dependence of the
added mass, Aij, and stiffness, Kij, coefficients on the wave
excitation frequency, u, results to natural frequencies in each
degree of freedom dependent upon u. Therefore, resonance
occurs at wave frequencies where the absolute differences
between the excitation and the natural frequency juKunjj tend
to zero.
In the case of sway response (Fig. 11), the increase of
mooring lines stiffness (see Fig. 6a) leads in general to lower
0 0.50
0.5
1
1.5
RA
O2(
m/m
)
0 0.50
1
2
3
4
5
B
ωn2
(rad
/sec
)
' denotes reLoukoge
Angelide
Fig. 11. Variation of RAO2 (sway) f
values as the draft increases with the exception of C3 which is
explained below. The behavior of C1 and C2 is the same, which
is attributed to the small differences of K22 between these two
configurations (see Fig. 6a). Resonance is observed between B/
LZ0 and 0.1 where the difference uKun2 tends to zero, and
then RAO2 gradually decreases. For the case of C3, resonance
also occurs at B/LZ0.1. However, the peak value is observed at
B/LZ0.125 due to the lower BEðDÞ22 value at B/LZ0.125
compared to the one at B/LZ0.1. Then the sway response
decreases, with the exception in the area between B/LZ0.8 and
0.9 where RAO2 increases and exhibits a second peak value at
about B/LZ0.85. This is attributed to the strong coupling
between sway and roll, which is caused by the mooring lines.
This fact results to an increased effect of the sway behavior on
the roll behavior and vice versa at the frequencies where
resonance of these motions occurs. At B/LZ0.8 roll resonance
is observed that leads to the increase of RAO2. Similarly, for
the case of C4, resonance is observed at about B/LZ0.125,
where the difference uKun2 becomes zero. However, the peak
value is observed at B/LZ0.15 due to the lower BEðDÞ22 value at
B/LZ0.15 compared to the one at B/LZ0.125. The small
increase at about B/LZ0.6 is attributed to the heave resonance
in this B/L range and the strong coupling between heave and
sway introduced by the mooring lines.
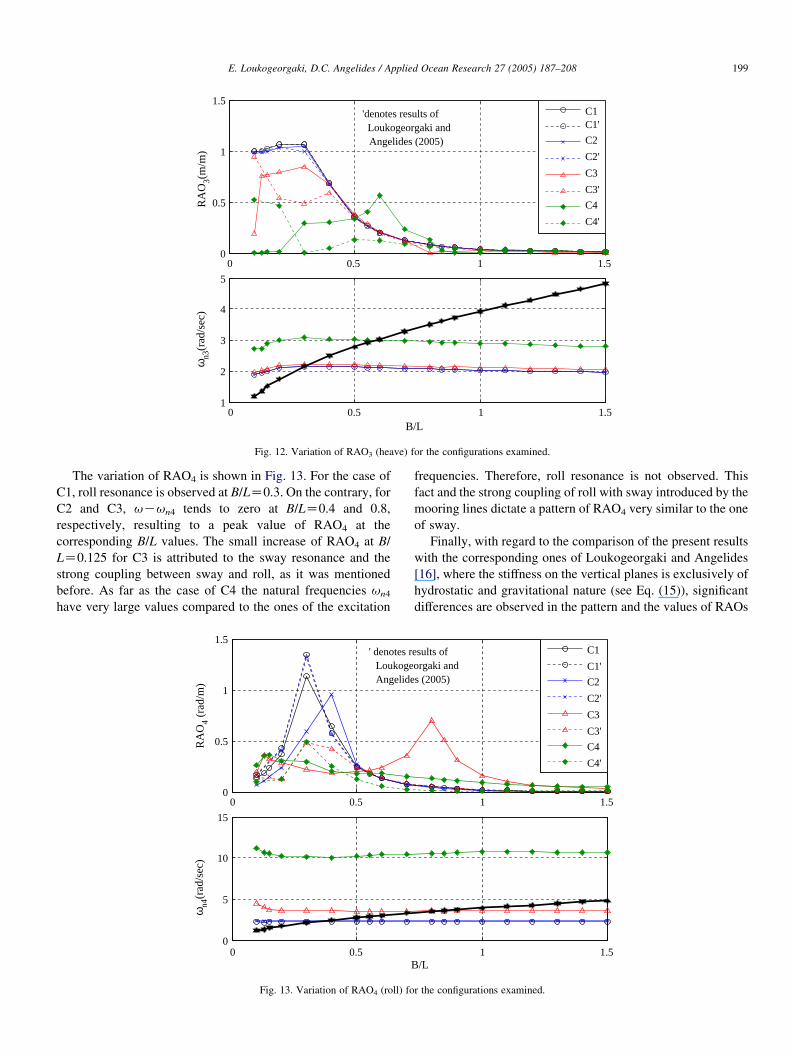
Fig. 12 depicts the variation of heave response, RAO3. It can
be seen, as in the case of sway, that for increasing draft RAO3
decreases. This is attributed to the increase of the mooring
lines’ stiffness K33 (see Fig. 6b). RAO3 for the case of C4
follows in general the pattern of the previous configurations.
However, for this configuration the difference uKun3 tends to
zero at about B/LZ0.6, which results to the peak value of
RAO3 at this B/L value.
1 1.5
1 1.5
/L
C1
C1'
C2
C2'
C3
C3'
C4
C4'
sults oforgaki ands (2005)
or the configurations examined.
0 0.5 1 1.50
0.5
1
1.5
RA
O3(
m/m
)
0 0.5 1 1.51
2
3
4
5
B/L
ωn3
(rad
/sec
)
C1C1'
C2
C2'
C3
C3'
C4
C4'
'denotes results of Loukogeorgaki and
Angelides (2005)
Fig. 12. Variation of RAO3 (heave) for the configurations examined.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 199
The variation of RAO4 is shown in Fig. 13. For the case of
C1, roll resonance is observed at B/LZ0.3. On the contrary, for
C2 and C3, uKun4 tends to zero at B/LZ0.4 and 0.8,
respectively, resulting to a peak value of RAO4 at the
corresponding B/L values. The small increase of RAO4 at B/
LZ0.125 for C3 is attributed to the sway resonance and the
strong coupling between sway and roll, as it was mentioned
before. As far as the case of C4 the natural frequencies un4
have very large values compared to the ones of the excitation
0 0.5
0 0.5
0
0.5
1
1.5
RA
O4
(rad
/m)
0
5
10
15
ωn4
(rad
/sec
)
' denotes rLoukogeAngelide
Fig. 13. Variation of RAO4 (roll) fo
frequencies. Therefore, roll resonance is not observed. This
fact and the strong coupling of roll with sway introduced by the
mooring lines dictate a pattern of RAO4 very similar to the one
of sway.
Finally, with regard to the comparison of the present results
with the corresponding ones of Loukogeorgaki and Angelides
[16], where the stiffness on the vertical planes is exclusively of
hydrostatic and gravitational nature (see Eq. (15)), significant
differences are observed in the pattern and the values of RAOs
1 1.5
1 1.5B/L
C1
C1'
C2
C2'
C3
C3'
C4
C4'
esults oforgaki ands (2005)
r the configurations examined.

0 0.5 1 1.50
2
4
6
8
10
Ten
sion
s (K
N)
0 0.5 1 1.50
5
10
15
20
25
B/L
Ten
sion
s (K
N)
Ten
sion
s (K
N)
Ten
sion
s (K
N)
0 0.5 1 1.50
50
100
150
200
0 0.5 1 1.50
100
200
300
400
B/L
Tst
Tst'
Tdyn
Tdyn'
Ttot
s
s
s
s
' denotes results of Loukogeorgakiand Angelides (2005)
C3
C2
C1
C4
Fig. 14. Variation of Tst, Tdyn and Ttot at the top of mooring line 1.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208200
for C3 and C4. Therefore, it is obvious that through the
transition from the slack to the taut condition of the mooring
lines the vertical stiffness of them affects more significantly the
dynamic response of the floating breakwater.
5.3. Static and dynamic forces of mooring lines
The performance of the mooring lines is defined in terms of
the static, Tst, and the dynamic, Tdyn, tensions at the top
(fairlead) of the mooring lines. The mooring lines that are
placed in the front part of the floating breakwater represent the
most heavily loaded ones under the action of waves in the
normal direction (see Fig. 3). Due to symmetry, the values of
Tst, Tdyn and total tension TtotZTstCTdyn are considered only
for mooring line 1 in Fig. 14.
The variation of Tst with B/L for a specific configuration
follows the variation of the steady drift forces. The dynamic
tensions exhibit large values at the low frequency range (up to
B/LZ0.4) for C1 and C2, where RAOs resonance occurs. The
same holds for C3. Additionally, the occurrence of the roll
resonance at higher values of B/L, for this configuration, results
to the appearance of large values of Tdyn in the range of
0.8%B/L%0.9. Finally, for C4, Tdyn exhibits larger values up
to B/LZ0.6, where the RAOs show larger values, especially for
heave; then a gradual decrease of Tdyn follows. The letter ‘s’ on
each of the subplots of Fig. 14 denotes the occurrence of
snapping (Tst!Tdyn). For the cases of this investigation,
snapping occurs only for C3 at the low frequency range and
at B/LZ0.8 and 0.9 where Tdyn exhibits maximum values. The
increased values of Tst in combination with the lower RAOs
compared to the corresponding ones for the case of C3 explains
the avoidance of snapping phenomena for C4. Finally, it should
be noted that for all configuration cases the total tension Ttot
depicts values lower than Tbreak.
Comparing the presented results with the corresponding
ones of Loukogeorgaki and Angelides [16], differences are
observed for the case of C2 for the values of Tdyn at the low
frequency range, due to differences of RAO4 and the
occurrence of roll resonance at B/LZ0.4 (see Fig. 13). Finally,
the remarkable differences between the responses (all RAOs)
of the cases C3 and C4 of this work and the results included in
Loukogeorgaki and Angelides [16] (see Figs. 11–13) lead to
different variations of Tdyn as well.
5.4. Effectiveness of the floating breakwater
The effectiveness of the moored floating breakwater is
investigated in terms of Kb and Kf coefficients (Eq. (18)). The
wave elevation was calculated for all configurations and for all
frequencies considered in the middle of the floating breakwater
(XZ0 m) at a line perpendicular to it with Y varying between
K2.5 %Y%K40 m in front of the breakwater and
2.5 %Y%40 m behind of, it according to the coordinate
system shown in Fig. 3. It is considered that the wave elevation
at this area is representative for the estimation of the
breakwater’s effectiveness. For each frequency and each
configuration, the wave elevation due to diffraction only and
due to both diffraction and radiation (complete problem) was
calculated.
Results are presented for four properly selected frequencies
in order to have a detailed and integrated description of the
effect of the configuration’s modification of the ‘base case’ on
the effectiveness of the floating breakwater in the low
(B/L%0.4), middle (0.5%B/L%0.9) and high
(1.0%B/L%1.5) wave frequency range. Specifically, results
are presented for B/LZ0.125 and 0.3 (low frequency range
(LFR), Figs. 15 and 17a), for B/LZ0.7 (middle frequency

Fig. 15. Variation of Kb with Y (XZ0 m) for (a) B/LZ0.125 and (b) B/LZ0.3 (LFR).
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 201
range (MFR), Figs. 16a and 17b) and for B/LZ1.3 (high
frequency range (HFR), Fig. 16b).
From these figures, it is obvious that the wave elevation
coefficients resulting from diffracted waves ðKdf ;K
db Þ are almost
the same for all configurations. Therefore, it is easily concluded
that the variations of Kb and Kf among the various
configurations are attributed to the modification of the radiated
waves associated with the changes of the stiffness and the drag
damping of the mooring lines.
Fig. 16. Variation of Kb with Y (XZ0 m) for (a)
Consider initially the variation of Kb in the LFR, where most
of resonance phenomena occur (Fig. 15). The first two
configurations have very similar patterns due to the very
similar values of RAOs for these B/L values. However, for B/
LZ0.3, C2 shows quite lower values, due to the absence of roll
resonance. Configurations C3 and C4 show lower values for Kb
and, therefore, are more effective compared to the ‘base case’.
For the case of B/LZ0.125 this is attributed: (a) to the fact that
RAO2 and RAO4 are out of phase, which leads to lower values
B/LZ0.7 (MFR) and (b) B/LZ1.3 (HFR).

Fig. 17. Variation of Kf with Y (XZ0 m) for (a) B/LZ0.3 (LFR) and (b) B/LZ0.7 (MFR).
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208202
of radiated waves compared to the case of C1, although their
values are higher, and (b) to the lower values of RAO3. In a
similar manner, the lower values for B/LZ0.3 for these
configurations are attributed to the lower values of RAOs.
Additionally, for B/LZ0.3, a different pattern is observed for
C3 and C4 which follows the pattern of Ktd. The different
(negative) phase differences of the radiated waves with respect
to the incident wave explain this different pattern.
The combination of the above interpretations leads to the
conclusion that C3 and C4 could be considered as the most
effective cases at B/LZ0.125 and 0.3, over a wider range of
locations considered along the portion of the Y-axis. However,
one should also consider two constraints for the selection of
the ‘optimum configuration’ regarding the performance of the
mooring lines. The first one refers to the values of Tst and Tdyn
exercised at the top of the mooring lines, while the second one
is related with the values of Vbot. It is obvious that the increase
of the draft leads to the increase of Vbot, because the initial
fbot increases. For the case of B/LZ0.125 snapping is
observed (Fig. 14) for C3. Consequently, C4 could be
considered as better solution compared to the ‘base case’
for this B/L value. For B/LZ0.3 snapping is not observed for
either C3 or C4. Therefore, configuration C3 is considered
most preferable for this B/L value, as it has lower value of
Vbot.
As far as the coefficient Kf (Fig. 17a), larger values are
observed as the draft increases for each specific B/L value.
Exception represents C4 for B/LZ0.3; for this B/L value, C4
shows larger values of Kb close to the breakwater which results
to lower values of Kf. The pattern of Kf for all configurations is
the same and only phase differences are observed. This can be
explained as follows. The pattern of Kdf is quite intense,
whereas the pattern of the wave elevation coefficient in front
due to radiated waves is smoother and of lower values
compared to Kdf . Therefore, the radiated waves can only
contribute to the values and not the pattern of Kf. The increase
of the draft leads to decrease of the floating breakwater’s
response (except for RAO2 and RAO4 at B/LZ0.125 for C3
and RAO4 at B/LZ0.125 for C4, see Figs. 11 and 13) and to
reduction of the effect of the radiated waves. Consequently, this
results to increase of the Kf values, which approach the values
of Kdf .
With regard to the case of B/LZ0.7 (MFR), Kb coefficient
(Fig. 16a) for C3 and C4 show lower values compared to the
‘base case’. In fact, Kb for C3 exhibits lower values than the
ones for C4, which are closer to the values of Kdb . This is
attributed to the lower values of RAO2 and RAO3 at this B/L
value. Taking into consideration the constraints for the
selection of the ‘optimum’ configuration, as described before,
the avoidance of snapping phenomena at this B/L value leads to
the conclusion that C3 represents the ‘optimum’ case for B/LZ0.7. As far as the coefficient Kf (Fig. 17b), the intense variation
of Kdf due to diffracted waves, results to values of Kf close to Kd
f
for all configurations examined.
Finally, Fig. 16b includes the variation of Kb for B/LZ1.3
(HFR). C1 and C2 show very similar values, while C3 follows
the pattern of the two previous configurations with increased
values. This is attributed to the higher values of RAOs for C3
compared to the responses of the first two configurations. On
the contrary, C4 shows lower values and closer to the values of
Kdb . Therefore, configuration C4 is considered as the ‘optimum’
one for this frequency range, because the increased effective-
ness of the floating breakwater and the satisfactory perform-
ance of the mooring lines (i.e. avoidance of snapping

Fig. 18. Kb and Kf contours for: (a) C1 and B/LZ0.125, (b) C4 and B/LZ0.125, (c) C1 and B/LZ0.7 and (d) C3 and B/LZ0.7.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 203
phenomena see Fig. 14) are both satisfied. The variations of Kf
coefficients for these values of B/L are similar to the variation
of Kf at B/LZ0.7 and therefore, they are not included in the
present work.
At this point, it should be noted that for all B/L cases the
values of Kb coefficients for C1 and C2 are very similar with
the corresponding ones described by Loukogeorgaki and
Angelides [16], as shown in Figs. 15 and 16. However, for
C3 and C4 different values and different behavior are observed.
This is attributed to the differences in RAOs for these
configurations, due to the inclusion of the vertical stiffness in
the present work, as explained in Section 5.2.
Finally, Fig. 18 contains contours of Kb and Kf in a large
area in front and behind the breakwater for B/LZ0.125
(Fig. 18a and b) and B/LZ0.7 (Fig. 18c and d). Fig. 18a and c
correspond to the ‘base case’, whereas Fig. 18b and d
correspond to C4 and C3, respectively. The larger effectiveness
of C4 for B/LZ0.125 and C3 for B/LZ0.7 in a wide area
behind the breakwater can be easily observed, while Kf in the
front area shows a more intense variation.
5.5. Decision framework for the effective performance
of the floating breakwater
The results presented in the previous subsections support the
need for a decision process that should be implemented in order
to select the ‘optimum’ configuration (expressed with Ci) of the
floating breakwater for a specific wave environment (expressed
with B/L values). A configuration Ci (length of mooring lines
and draft) is considered as the ‘optimum’ one when it satisfies:
(a) the objective of effective performance of the floating
breakwater, i.e. effective reduction of the transmitted energy in
the area behind the floating breakwater and (b) the constraints
of the mooring lines that confine the objective of the effective
performance of the floating breakwater, i.e. failure of mooring
lines and snapping occurrence (primary constraints) and
minimization of the vertical force at the bottom (secondary
constraint). It should be mentioned that the term ‘optimum’ is
not used with reference to any mathematical optimization
process; it simply refers to the best feasible configuration of the
floating breakwater compared to the initial one.

Table 2
Decision framework—relation of B/L and ‘optimum’ Ci for effective performance of a floating breakwater
2829
30
0.750.80.850
0.5
1
1.5
Ltot (m)dr (m)
B/L
LFR
MFR
HFRLFR-MFR transition
MFR-HFR transition
Fig. 19. ‘Optimum’ draft and ‘optimum’ mooring lines length of all the
frequency ranges.
E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208204
Based on these considerations, a decision framework is
introduced, as shown in Table 2 that relates the wave
environment (INPUT) with the final ‘optimum’ selected
configuration of the floating breakwater (OUTPUT) through
a specific decision process, which is described below. At this
point, it should be emphasized that the proposed decision
framework, generally, presents an alternative design approach
for moored floating structures. It can be applied in cases where
there is a necessity to modify the dynamic characteristics of
them, through the modification of the static and dynamic
characteristics of the mooring lines. The final overall target is
to optimize the performance of the system. The INPUT and the
OUTPUT of this framework could remain the same. However,
the rest of its components (design objectives—constraints) can
be properly adjusted, so that they can present the conditions,
the characteristics and the design targets of a specific case.
In Section 5.4, this framework has been already used in
order to select the ‘optimum’ configuration for specific,
properly selected, B/L values. The application of the same
decision process for the rest of B/L values (see Table 2) results
to the determination of a relation between the wave
environment (LFR, MFR, and HFR), investigated in the
present work, and the configuration of the floating breakwater.
Initially, for each B/L value, configurations Ci are selected
considering only the effectiveness of the floating breakwater as
the selection criterion (Stage 1). Then, the constraints of the
mooring lines are taken into consideration (Stage 2). In cases
where a configuration Ci, which has been considered as the best
case in Stage 1, does not satisfy one of the two primary
constraints, it is rejected and the subsequent configuration Ci
determined in Stage 1 is selected. This Ci could be either a
configuration that has been considered as better solution versus
C1 (see for example B/LZ0.1 in Table 2) or the initial
configuration C1 (see for example B/LZ0.8 in Table 2). On the
contrary, in cases where the primary two constraints are both
satisfied, the vertical force at the bottom (minimum value)
represents the critical factor for the selection of the ‘optimum’
configuration (see for example B/LZ0.3 in Table 2). The

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 205
combination of these items results to the final decision for the
‘optimum’ configuration (Stage 3).
The final decision points derived in Table 2 are graphically
presented in three dimensions (Fig. 19). Each configuration is
represented by the value of dri and the value of the required Ltoti
of the mooring lines for achieving the corresponding draft for
each B/L value. It is easily concluded that the initial
configuration C1 of the floating breakwater should be modified
in the low and high frequency range, as well as for some
intermediate frequencies in the middle frequency range. On the
contrary, in the transition frequency ranges (LFR–MFR and
MFR–HFR) the initial configuration C1 represents the
‘optimum’ one.
6. Conclusions
The performance of a moored floating breakwater is
theoretically investigated under the action of normal regular
waves. Special attention is given to the effect of different
configurations of the mooring lines and, consequently, to
the effect of stiffness and damping of the mooring lines on the
dynamic response and on the protective effectiveness of
the floating breakwater. A three-dimensional model of the
hydrodynamic analysis of the floating body is coupled with a
model of the static and dynamic analysis of the mooring lines,
using an appropriate iterative procedure in terms of the steady
drift forces and the dynamic response of the floating break-
water. The stiffness coefficients of the mooring lines are derived
in the six degrees of freedom of the floating breakwater, based
on the differential changes of mooring lines’ tensions caused by
the static motions of the floating body. Furthermore, an
extensive parametric study has been presented. The initial
configuration of a ‘base case’ floating breakwater is altered
through the appropriate modifications of the mooring lines’
length, which affect directly mooring lines’ stiffness and
damping. The main conclusions from this study are as follows:
1. The modification of the initial configuration of the floating
breakwater through the modification of the length of the
mooring lines affects the stiffness and drag damping of the
mooring lines, and consequently, the dynamic response and
the effectiveness of the floating breakwater.
2. The transition from the slack to the taut condition leads to
the increase of the stiffness of the mooring lines imposed on
the floating breakwater. Additionally, through this tran-
sition, the stiffness of the mooring lines on the vertical
planes affects more significantly the overall vertical
stiffness of the floating breakwater and consequently, its
overall performance.
3. Intense modification of the dynamic response of the floating
breakwater is observed through the transition from the slack
to the taut condition, while stronger coupling between the
degrees of freedom is also introduced. In the case of taut
mooring lines, the resonance of the vertical motions (heave
and roll) is shifted at higher frequencies.
4. The small change of the draft of the floating breakwater
leads to a similar wave diffracted field for all the
configurations investigated. Therefore, any changes on
the effectiveness of the floating breakwater are attributed to
the modification of the response of the floating breakwater
and thus, to the modification of the stiffness and damping of
the mooring lines for the configurations examined.
5. The transition from the slack to the taut condition of the
mooring lines results to a significant increase of the
effectiveness of the floating breakwater for the whole
frequencies examined (even in the low frequency range).
The increase of the protective effectiveness of the floating
breakwater is gradually reduced towards higher frequencies
(50% increase of effectiveness in the LFR, 20% in the MFR
and 10–15% for the HFR). Exceptions represent the
transitional stages (LFR–MFR and MFR–HFR).
6. Existence of ‘optimum’ configuration is demonstrated for
the wave frequencies range considered. The selection of the
‘optimum’ configuration is based on a decision process that
is adopted in order to ensure: (a) effective reduction of the
transmitted energy behind the breakwater and (b) satisfac-
tion of the constraints associated with the mooring lines.
7. A decision framework is finally introduced that relates the
wave environment (INPUT) with the final ‘optimum’
selected configuration of the floating breakwater (OUT-
PUT) through a specific decision process. This framework
could form the basis for the development of a control system
that addresses effectiveness target of the floating breakwater
and simultaneously the constraints introduced by the
mooring lines.
Acknowledgements
The authors would like to thank the reviewers for their
valuable comments and suggestions on the final manuscript.
Furthermore, they would like to acknowledge the financial
support of the Hellenic General Secretariat for Research and
Technology (GSRT) and the European Social Fund (ESF)
through the Operational Programme ‘Competitiveness’ (Op.
Pr. Comp).
Appendix A. Definition of kj, km and kn terms
The following relations are derived for the terms kj, km and
kn:
(a) qX rotation (jZ0, mZ1 and nZ2)
kjZ0 ZKvlx
vqX
Zðsin qX sin qZ Ccos qX sin qY cos qZÞYPO
C ðKsin qX sin qY cos qZ Ccos qX sin qZÞZPO
(A1a)
kmZ1 ZKvly
vqX
Zðcos qX sin qY sin qZKsin qX cos qZÞYPO
Kðcos qX cos qZ Csin qX sin qY sin qZÞZPO
(A1b)

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208206
knZ2 ZKvlzvqX
Z ðcos qX cos qY ÞYPOKðsin qX cos qY ÞZPO
(A1c)
(b) qY rotation (jZ3, mZ4 and nZ5)
kjZ3ZKvlxvqY
ZKðsinqY cosqZÞXPO
CðsinqX cosqY cosqZÞYPOCðcosqX cos qY cosqZÞZPO
(A2a)
KmZ4Zvly
vqY
ZKðsinqY sinqZÞXPOCðsinqX cosqY sinqZÞYPO
CðcosqX cosqY sinqZÞZPO (A2b)
knZ5ZKvlz
vqY
ZKðcosqY ÞXPOKðsinqX sinqY ÞYPO
KðcosqX sinqY ÞZPO (A2c)
(c) qZ rotation (jZ6, mZ7 and nZ8)
kjZ6ZKvlx
vqZ
ZKðsinqZ cosqY ÞXPOKðcosqX cosqZ
CsinqX sinqY sinqZÞYPO
CðKcosqX sinqY sinqZ
CsinqX cosqZÞZPO (A3a)
kmZ7ZKvly
vqZ
ZðcosqZ cosqY ÞXPOCðsinqX sinqY cosqZ
KcosqX sinqZÞYPOCðsinqX sinqZ
CcosqX sinqY cosqZÞZPO (A3b)
knZ8ZKvlzvqZ
Z0 (A3c)
The above equations can be simplified in case of horizontal
forces and moment by setting ZoZqXZqYZ0 as following:
kjZ0ZsinqZZPO (A4a)
kmZ1ZKcosqZYPO (A4b)
knZ2ZYPO (A4c)
kjZ3ZcosqZZPO (A5a)
kmZ4ZsinqZZPO (A5b)
knZ5ZKXPO (A5c)
kjZ6ZsinqZXPOKcosqZYPO (A6a)
kmZ7ZcosqZXPOKsinqZYPO (A6b)
knZ8Z0 (A6c)
Appendix B. Equations of the stiffness coefficients
(a) Stiffness coefficients K1j (jZ1,., 6)
Km11ZK
vðfXÞm
vXo
ZKvH cosq
vXo
ZKvT cosfcosq
vXo
0
Km11ZAcos2qCB sin2qKC cos2q (B1)
Km12ZðAKBKCÞsinqcosq (B2)
Km13ZDcosq sinu (B3)
Km14ZDðk0cosucosqCk1cosu sinqCk2sinuÞcosq
KB sinqðk1cosqKk0sinqÞ (B4)
Km15ZDðk3cosucosqCk4cosu sinqCk5sinuÞcosq
KB sinqðk4cosqKk3sinqÞ (B5)
Km16ZDðk6cosucosqCk7cosu sinqCk8sinuÞcosq
KB sinqðk7cosqKk6sinqÞ (B6)
(b) Stiffness coefficients K2j (jZ1,., 6)
Km21ZKm
12 (B7)
Km22ZA sin2qCBcos2qKC sin2q (B8)
Km23ZD sinq sinu (B9)
Km24ZDðk0 cosucosqCk1 cosu sinqCk2 sinuÞsinq
CBcosqðk1 cosqKk0 sinqÞ (B10)
Km25ZDðk3 cosucosqCk4 cosu sinqCk5 sinuÞsinq
CBcosqðk4 cosqKk3 sinqÞ (B11)
Km26ZDðk6 cosucosqCk7 cosu sinqCk8 sinuÞsinq
CBcosqðk7 cosqKk6 sinqÞ (B12)
(c) Stiffness coefficients K3j (jZ1,., 6)
Km31ZE cosqcosu (B13)
Km32ZE sinqcosu (B14)

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208 207
Km33ZE sinu (B15)
Km34ZEðk0 cosucosqCk1 cosu sinqCk2 sinuÞ (B16)
Km35ZEðk3 cosucosqCk4 cosu sinqCk5 sinuÞ (B17)
Km36ZEðk6 cosucosqCk7 cosu sinqCk8 sinuÞ (B18)
(d) Stiffness coefficients K4j (jZ1,., 6)
Km41ZðYPKYoÞK
m31KðZPKZoÞK
m21 (B19)
Km42ZðYPKYoÞK
m32KðZPKZoÞK
m22 (B20)
Km43ZðYPKYoÞK
m33KðZPKZoÞK
m23 (B21)
Km44ZTstðk1sinfKk2cosf sinqÞCðYPKYoÞK
m34KðZPKZoÞK
m24
(B22)
Km45ZTstðk4sinfKk5cosf sinqÞCðYPKYoÞK
m35KðZPKZoÞK
m25
(B23)
Km46ZTstðk7sinfKk8cosf sinqÞCðYPKYoÞK
m36KðZPKZoÞK
m26
(B24)
(e) Stiffness coefficients K5j (jZ1,., 6)
Km51ZðZPKZoÞK
m11KðXPKXoÞK
m31 (B25)
Km52ZðZPKZoÞK
m12KðXPKXoÞK
m32 (B26)
Km53ZðZPKZoÞK
m13KðXPKXoÞK
m33 (B27)
Km54ZTstðk2cosfcosqKk0sinfÞCðZPKZoÞK
m14KðXPKXoÞK
m34
(B28)
Km55ZTstðk5cosfcosqKk3 sinfÞCðZPKZoÞK
m15KðXPKXoÞK
m35
(B29)
Km56ZTstðk8cosfcosqKk6sinfÞCðZPKZoÞK
m16KðXPKXoÞK
m36
(B30)
(f) Stiffness coefficients K6j (jZ1,., 6)
Km61ZKm
16 (B31)
Km62ZKm
26 (B32)
Km63ZðXPKXoÞK
m23KðYPKYoÞK
m13 (B33)
Km64ZTstcosfðk0sinqKk1cosqÞCðXPKXoÞK
m24KðYPKYoÞK
m14
(B34)
Km65ZTstcosfðk3sinqKk4cosqÞCðXPKXoÞK
m25KðYPKYoÞK
m15
(B35)
Km66ZTstcosfðk6sinqKk7cosqÞCðXPKXoÞK
m26KðYPKYoÞK
m16
(B36)
In the above equations, the terms A–E are given as follows:
AZdTst
dlcosucosf BZTst
cosf
lcosu
CZTst
df
dlsinfcosu DZ
dTst
dlcosfKTst
df
dlsinf
EZdTst
dlsinfCTst
df
dlcosf
(B37)
References
[1] Bhat S. Performance of twin-pontoon floating breakwaters. PhD thesis,
Department of Civil Engineering, University of British Columbia,
Vancouver, Canada; 1998.
[2] Bhat S, Isaacson M. Performance of twin-pontoon floating break-
water. In: ISOPE 1998, eighth international conference of offshore
and polar engineering Montreal, Canada, vol. 3; May 24–29, 1998. p.
584–90.
[3] Briggs M, Ye W, Demirbilek Z, Zhang J. Comparison of hydrodynamic
parameters for a floating breakwater. In: First international symposium on
‘monitoring of breakwaters’, ASCE, Madison, WI, USA; September 8–
10, 1999. p. 37–51.
[4] Daghigh M, Paein Koulaei RT, Seif MS. Mooring system design and
optimization for floating bridge of Urmia Lake. In: OMAE2002-28343
21st international conference on offshore mechanics and arctic
engineering, Oslo, Norway; June 23–28, 2002. p. 1–8.
[5] Irvine HM. Cable structures. Cambridge, MA: MIT Press; 1981.
[6] Isaacson M. Hydrodynamic coefficients of floating breakwaters. In: 11th
Canadian hydrotechnical conference, Fredericton, Canada, vol. 1; June 8–
11, 1993. p. 485–94.
[7] Isaacson M. Wave effects on floating breakwaters. In: Canadian coastal
conference, Vancouver, Canada, vol. 1; May 4–7, 1993. p. 53–66.
[8] Isaacson M, Baldwin J. Moored structures in waves and currents. Can
J Civ Eng 1996;23(2):418–30.
[9] Isaacson M., Bhat S. Analysis of Moored Floating Breakwaters.
In: Annual conference of the Canadian Society for Civil
Engineering, Edmonton, Canada, vol. 1; May 29–June 1, 1996.
p. 610–19.
[10] Isaacson M., Garceau N. Wave propagation past long floating break-
waters. 13th Canadian hydrotechnical conference, Sherbrooke, Canada,
vol. 1, May 27–30, 1997. p. 3–10.
[11] Isaacson M, Nwogu O. Wave loads and motions of long structures in
directional seas. J Offshore Mech Arct Eng ASME 1987;109(2):
126–32.
[12] Jain RK. A simple method of calculating the equivalent stiffnesses in
mooring cables. Appl Ocean Res 1980;2:139–42.
[13] Kruezer E, Wilke U. Dynamics of mooring systems in ocean engineering.
Arch Appl Mech 2003;73:270–81.

E. Loukogeorgaki, D.C. Angelides / Applied Ocean Research 27 (2005) 187–208208
[14] Lee J, ChoW. Hydrodynamic analysis of wave interactions with a moored
floating breakwater using the element-free Galerkin method. Can J Civ
Eng 2003;30(4):720–33.
[15] Lee C-H, Newman JN. Computation of wave effects using the panel
method. In: Chakrabarti S, editor. Numerical models in fluid-structure
interaction, Preprint. Southampton: WIT Press; 2004.
[16] Loukogeorgaki E, Angelides DC. Effect of mooring lines on floating
breakwaters performance. In: ISOPE 2005, 15th international conference
of offshore and polar engineering, Seoul, Korea, 2005.
[17] McCartney M, Bruce L. Floating breakwater design. J Waterway Port
Coastal Ocean Eng 1985;111(2):304–17.
[18] Newman JN. The drift force and moment on ships in waves. J Ship Res
1967;11:51–60.
[19] Newman JN. Marine hydrodynamics. Cambridge, MA: MIT Press;
1977.
[20] Sannasiraj SA, Sundar V, Sundaravadivelu R. Mooring forces and motion
responses of pontoon-type floating breakwaters. Ocean Eng 1998;25(1):
27–48.
[21] Triantafyllou MS. Preliminary design of mooring systems. J Ship Res
1982;26(1):25–35.
[22] Triantafyllou MS, Bliek A, Shin H. Static and fatigue analysis of mutli-
leg mooring systems. Technical report.: MIT Press; 1986.
[23] Williams AN, Abul-Azm AG. Dual pontoon floating breakwater. Ocean
Eng 1997;24(5):465–78.
[24] Williams AN, Lee HS, Huang Z. Floating pontoon breakwaters. Ocean
Eng 2000;27(3):221–40.
Demos C. Angelides is a Professor of Civil Engineering at the University of
Thessaloniki, Greece with teaching and research responsibilities on analysis,
design and construction of marine structures. He was Director of the Hydraulics
and Environmental Engineering Division 2002–2004. Currently, he is the
Chairman of the Civil Engineering Department of the Aristotle University of
Thessaloniki. Previously, he was with McDermott International, Inc., in the
USA, having several engineering and management positions. He received his
Dipl. Ing. Degree in Civil Engineering from the Aristotle University of
Thessaloniki, Greece, and his S.M. and PhD both from the Civil Engineering
department of the Massachusetts Institute of Technology (MIT). He delivered
invited lectures in several organizations in the USA and Europe. He
participated in conferences and has published several papers in journals,
chapters in books, and a book. He is a member of several scientific and
professional societies. He is included in Who’s Who publications of the
Marquis Publications Board.
Eva Loukogeorgaki is a research assistant in the Department of Civil
Engineering of the Aristotle University of Thessaloniki, Greece, currently
pursuing her doctoral degree on ‘Control of moored floating breakwaters for
increasing their efficiency and minimizing the failure of the mooring system’.
She holds a Dipl. Ing. in Civil Engineering from the Aristotle University of
Thessaloniki. Prior to pursuing her graduate studies, she has worked in analysis,
design and construction supervision of several civil engineering projects. She is
a registered Professional Engineer in Greece.
Related Documents











