c 2014 г. А.А. ШЕВЛЯКОВ, (Институт проблем управления им. В.А. Трапезникова РАН, Москва) СТАБИЛИЗАЦИЯ ДВИЖЕНИЙ ВЕРТОЛЕТА ПО ВСЕМ ПЕРЕМЕННЫМ 1 Для уравнений, описывающих движение вертолета, решается зада- ча стабилизации положения равновесия. Применяются преобразование к нормальной форме, частичная линеаризация обратной связью и метод виртуальных выходов, что позволяет стабилизировать систему по всем переменным. 1. Введение Беспилотные летательные аппараты (БПЛА) являются важным объектом при- ложения результатов теории управления. Это связано, в первую очередь, с их воз- растающим количеством и все более важными задачами, которые приходится вы- полнять беспилотным аппаратам. В настоящий момент применяются БПЛА разных форм, размеров и компоновок. Выбор конструкции обусловлен решаемыми задачами и условиями применения. Наряду с другими используется традиционная вертолетная схема с двумя винтами: главным и хвостовым. При внедрении БПЛА возникает необходимость их оснащения автоматическими системами управления для обеспечения действий в автономном и полуавтономном режимах. Таким образом, актуальной является задача синтеза алгоритмов управле- ния для динамической системы. Для решения задач управления вертолетами и БПЛА вертолетного типа приме- няются разные подходы, в том числе функции Ляпунова и метод обратного хода, нечеткие модели [1], декомпозиция [2] и преобразование к нормальной форме [3]. 1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследо- ваний (проект №12-07-00329-а) и Министерства образования и науки Российской Федерации (согла- шение 14.В37.21.0370). 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
c© 2014 г. А.А. ШЕВЛЯКОВ,
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
СТАБИЛИЗАЦИЯ ДВИЖЕНИЙ ВЕРТОЛЕТА ПО ВСЕМ
ПЕРЕМЕННЫМ1
Для уравнений, описывающих движение вертолета, решается зада-
ча стабилизации положения равновесия. Применяются преобразование к
нормальной форме, частичная линеаризация обратной связью и метод
виртуальных выходов, что позволяет стабилизировать систему по всем
переменным.
1. Введение
Беспилотные летательные аппараты (БПЛА) являются важным объектом при-
ложения результатов теории управления. Это связано, в первую очередь, с их воз-
растающим количеством и все более важными задачами, которые приходится вы-
полнять беспилотным аппаратам. В настоящий момент применяются БПЛА разных
форм, размеров и компоновок. Выбор конструкции обусловлен решаемыми задачами
и условиями применения. Наряду с другими используется традиционная вертолетная
схема с двумя винтами: главным и хвостовым.
При внедрении БПЛА возникает необходимость их оснащения автоматическими
системами управления для обеспечения действий в автономном и полуавтономном
режимах. Таким образом, актуальной является задача синтеза алгоритмов управле-
ния для динамической системы.
Для решения задач управления вертолетами и БПЛА вертолетного типа приме-
няются разные подходы, в том числе функции Ляпунова и метод обратного хода,
нечеткие модели [1], декомпозиция [2] и преобразование к нормальной форме [3].1Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследо-
ваний (проект 12-07-00329-а) и Министерства образования и науки Российской Федерации (согла-
шение 14.В37.21.0370).
1
Важным режимом полета вертолета является висение в заданной точке, т.е. переме-
щение в точку и последующее сохранение неизменного положения и ориентации. В
связи с этим насущной задачей является получение управления, реализующего дан-
ный режим. В [3] система уравнений, описывающих движение вертолета, приводится
к нормальной форме [4] относительно некоторых заданных выходов. За счет этого
траектория системы стабилизируется по части переменных, остаются непогашенны-
ми колебания по углам тангажа и крена, что может привести к срыву выполнения
полетного задания. В случае если система является минимально-фазовой, то мето-
дом из [3] может быть достигнута стабилизация положения равновесия по всем пере-
менным. В противном случае стабилизация может быть трудной задачей. Одним из
способов решения этой задачи является метод виртуальных выходов, предложенный
в [5–7].
Основные результаты метода виртуальных выходов получены для систем со ска-
лярным управлением, для которых относительная степень выхода равна единице или
двум, и для систем с однородной векторной относительной степенью r = (1, . . . , 1),
r = (2, . . . , 2). В [8] некоторые из результатов обобщены на случай произвольной
относительной степени для систем со скалярным управлением.
В данной статье построен закон управления, стабилизирующий положение рав-
новесия системы, описывающей движение вертолета, по всем переменным. Исполь-
зованный метод позволил обойтись без применения линеаризации в окрестности по-
ложения равновесия.
2. Постановка задачи
Рассмотрим модель движения вертолета, заданную уравнениями:
(1)
r = V,
mV = F,
Ω = Dωb,
Jbωb = Mb − ωb × Jωb,
2

где × обозначает векторное произведение, r = (x, y, z) — радиус-вектор центра масс
в земной системе координат, Ω = (ψ, θ, γ) — углы Крылова ориентации вертолета,
ωb =
sin θ 0 1
cos γ cos θ sin γ 0
− sin γ cos θ cos γ 0
ψ
θ
γ
,
D =
0 sin γ
cos θcos γcos θ
0 cos γ − sin γ
1 − sin γ sin θcos θ
− cos γ sin θcos θ
.
В [9] приведены выражения для сил F и моментов Mb, действующих на вертолет,
учитывающие аэродинамические силы.
Задача состоит в том, чтобы стабилизировать положение равновесия (1), которое
описывается уравнениями:
V = 0,
F = 0,
Dωb = 0,
Mb − ωb × Jωb = 0.
Для решения этой задачи будет использоваться метод виртуальных выходов [5,6].
С этой целью приведем уравнения движения вертолета (1) к виду
(2) x = A(x) +m∑i=1
Bi(x)ui,
где x ∈ Rn, u = (u1, . . . , um)T ∈ Rm, A(0) = 0, A(x) = (a1(x), . . . , an(x))T,
B(x) = (B1(x), . . . , Bm(x)), Bj(x) = (b1j(x), . . . , bnj (x))T, j = 1,m, i = 1, n, ai(x),
bji (x) ∈ C∞(Ω),
Ω — открытое множество, содержащее положение равновесия x = 0.
Здесь и далее под аффинной системой будем понимать систему вида (2).
Заметим, что управления в (2) входят линейно, а в исходные уравнения – нелиней-
но. Действительно, физически обоснованным является выбор в качестве управлений
силы тяги главного винта T tr и хвостового винта Tmr, а также углы наклона глав-
ного винта α и β. Однако эти величины входят в выражения для сил и моментов,
3

действующих на вертолет, нелинейно. Чтобы рассматривать систему как аффинную,
осуществим динамическое расширение [4] и добавим к системе (1) уравнения
Tmr = u1, Ttr = u2, α = u3, β = u4.
(3)
r = V,
mV = F,
Ω = Dωb,
Jbωb = Mb − ωb × Jωb,
Tmr = u1,
T tr = u2,
α = u3,
β = u4.
Чтобы найти положение равновесия системы (3), силы и моменты, при которых
вертолет неподвижно висит в воздухе, необходимо решить систему:
(4)
F = 0,
Dωb = 0,
Mb − ωb × Jωb = 0.
Для упрощения зададим численные значения параметров вертолета. Эти параметры
взяты из [9] и не приводятся здесь из-за громоздкости. Одно из положений равнове-
сия, найденное с использованием системы Matlab, задается соотношениями:
r0x = 0, V 0
x = 0, ψ0 = 0, ω0bx = 0,
r0y = 0, V 0
y = 0, θ0 ≈ 0, 2068, ω0by = 0,
r0z = 0, V 0
z = 0, γ0 ≈ 0, 0642, ω0bz = 0,
Tmr0 ≈ 82, 4436, α0 ≈ −0, 2073,
T tr0 ≈ 4, 4828, β0 ≈ −0, 1171.
4
Сделаем замену переменных:
x1 = rx, x4 = Vx, x7 = ψ,
x2 = ry, x5 = Vy, x8 = θ − θ0,
x3 = rz, x6 = Vz, x9 = γ − γ0,
x15 = α− α0, x16 = β − β0,
x10 = ωbx, x13 = Tmr − Tmr0,
x11 = ωby, x14 = T tr − T tr0,
x12 = ωbz.
Данная замена является линейной и невырожденной в R16. Исследуемая система
примет вид:
(5)
x1 = x4 ,
x2 = x5 ,
x3 = x6 ,
x4,6 = 1m
[R(x7, x8, x9)F r
b (x13, x14, x15, x16) + F fus(x4, x5, x6) +G],
x7,9 = D(x7, x8, x9)x10,12 ,
x10,12 = J−1b [Mb(x4, x5, x6, x13, x14, x15, x16) − x10,12 × Jbx10,12] ,
x13 = u1 ,
x14 = u2 ,
x15 = u3 ,
x16 = u4 .
Здесь через xi,j обозначен вектор-столбец переменных (xi, xi+1, . . . , xj)T.
Рассмотрим задачу асимптотической стабилизации нулевого положения равно-
весия этой системы. Управление, решающее эту задачу, может реализовать режим
висения для вертолета. Будем искать управления в классе функций C∞(x) без огра-
ничений на величину. В качестве метода используем преобразование к нормальной
форме в смысле Исидори [4], что позволит обойтись без линеаризации системы в
окрестности положения равновесия. Нормальная форма для системы с векторным
5

управлением в общем виде выглядит так:
(6)
z11 = z1
2 , . . . , z1r1−1 = z1
r1,
z1r1
= f1(z, η) + g11(z, η)u1 + · · ·+ g1m(z, η)um,
. . .
zm1 = zm2 , . . . , zmrm−1 = zmrm ,
zmrm = fm(z, η) + gm1(z, η)u1 + · · ·+ gmm(z, η)um,
(7)
η1 = q1(z, η) + p11(z, η)u1 + · · ·+ p1m(z, η)um,
. . .
ηn−r = qn−r(z, η) + pm1(z, η)u1 + · · ·+ pmm(z, η)um,
y = (z11 , z
21 , . . . , z
m1 ),
где fi(0, 0) = 0, i = 1,m, q(0, 0) = 0, z = (z1, z2, . . . , zm), u = (u1, . . . , um), причем
матрица (gij(0, 0))i,j=1,m невырожденна. Числа ri, i = 1,m, называют относительной
степенью выходов y. Их смысл — порядок производной в силу системы от функ-
ции y, в которой появляется управление. Нормальная форма системы в указанном
смысле определена относительно некоторых выходов y. Выходами называются неко-
торые гладкие функции, зафиксированные для системы. Эти функции подбираются
так, чтобы для исследуемой системы удалось построить систему вида (6), (7). Для
заданной системы различный выбор выходов задает разные нормальные формы.
Рассмотрим случай p ≡ 0, т.е. систему, в которой в уравнения с η в левой части
не входит управление. Систему уравнений
(8) η = q(0, η)
называют уравнениями нулевой динамики (нулевой динамикой). Если ее положение
равновесия η = 0 асимптотически устойчиво, то аффинную систему (2) с виртуаль-
ным выходом y называют минимально фазовой (в точке x = 0). Положение равно-
весия системы в нормальной форме может быть стабилизировано по переменным z
выбором управления в виде линеаризации обратной связью, т.е.
(9) u = G−1 (−f −Kz) ,
где G — матрица, составленная из коэффициентов при управлении gij в системе (6),
(7), K — матрица коэффициентов обратной связи.
6

Управление (9) стабилизирует систему (6), (7) по части переменных z. При этом
стабилизируемость по переменным η зависит от свойств нулевой динамики. Если ну-
левая динамика асимптотически устойчива, то положение равновесия (z, η) = (0, 0)
является локально асимптотически устойчивым [4].
Не любой выбор выходов обеспечивает стабилизацию по всем переменным. Сле-
дует найти такие выходы, относительно которых система является минимально-
фазовой [5, 6].
Система (2) преобразуется к виду (6), (7) c помощью некоторой замены перемен-
ных (z, η) = Ψ(x). Если найдено стабилизирующее управление u(z, η), то, используя
эту замену, можно построить управление u(x), решающее исходную задачу.
3. Преобразование к нормальной форме
Выберем выходы, чтобы они имели однородную относительную степень ρ =
(2, 2, 2, 2), и был применим метод виртуальных выходов. Подбор осуществляется,
чтобы для исходной исследуемой системы построить систему (6), (7). Для этого по-
ложим
(10) z11 = x4, z
21 = x5, z
31 = x6, z
41 = D1x10,12.
Дифференцируя функции zi1, i = 1, 4, в силу системы (5), найдем
(11)
z1−32 = z1−3
1 = 1mR F r
b + 1mF fus + g ,
z42 = z4
1 =˙D1x10,12 + D1J
−1b [Mb − x10,12 × Jbx10,12],
где D1 – первая строка матрицы D. Тогда для преобразования системы к нормальной
форме можно сделать замену:
(12)
z11 = x4, z
21 = x5, z
31 = x6, z
41 = D1x10,12,
z1−32 = 1
mR F r
b + 1mF fus + g,
z42 =
˙D1x10,12 + D1J
−1b [Mb − x10,12 × Jbx10,12],
η1 = x1, η2 = x2, η3 = x3, η4 = x7, η5 = x8, η6 = x9, η7 = D2x10,12,
η8 = D3x10,12.
Операции по преобразованию к нормальной форме были выполнены с помощью
системы компьютерной алгебры Maple.
7

Запишем систему (5) в виде заготовки, т.е. с правой частью, зависящей от пе-
ременных z и x. Это удобно сделать, так как при таком подходе результирующее
управление, записанное с учетом (12), получится сразу в исходных переменных:
(13)
z1−32 = z1−3
1 = 1mR F r
b + 1mF fus + g,
z42 = z4
1 =˙D1x10,12 + D1J
−1b [Mb − x10,12 × Jbx10,12] ,
z1−32 = 1
m
˙R F r
b + 1mR (F r
b )′x13,16u+ 1m
˙F fus,
z42 =
¨D1x10,12 + 2
˙D1J
−1b [Mb − x10,12 × Jbx10,12]+
+D1J−1b [(Mb)
′x4,6
x4,6 + (Mb)′x13,16
u −
−x10,12 × Jbx10,12 − x10,12 × Jbx10,12] ,
η1−3 = x4−6 ,
η4 = D1x10,12 ,
η5−6 = D23x10,12 ,
η7−8 =˙D23x10,12 + D23J
−1b [Mb − x10,12 × Jbx10,12] .
Расположим новые переменные в порядке η1, η2, η3, z1,31 , η4, η5, η6, z4
1 , η7, η8, z1,32 , z4
2 ,
а старые – x1,16. Введем обозначение 1mRF r
b + 1mF fus = 1
mR(F r
b + R−1F fus) = 1mRF .
Матрица Якоби замены переменных в блочной форме имеет вид
∂ (z, η)
∂ (x)=
E 0 0 0 0
0 E 0 0 0
0 0 E 0 0
0 0 D′Ωx10,12 D 0
0 1mRF ′x4,6
1mR′ΩF 0 1
mRF ′x13,16
0 0 (z42)
′Ω (z4
2)′ω D1I
−1M ′x13,16
.
Из этой записи видно, что невырожденность матрицы Якоби равносильна невырож-
денности блочной матрицы D 0
0 1mRF ′x13,16
(z42)
′Ω D1I
−1M ′x13,16
,
а так как D невырожденна, то – невырожденности матрицы 1mRF ′x13,16
D1I−1M ′
x13,16
.
8
Матрица R невырожденна, следовательно, невырожденность этой матрицы равно-
сильна невырожденности матрицы F ′x13,16
D1I−1M ′
x13,16
.
Заметим, что для невырожденности последней матрицы достаточно, чтобы матрица
F ′x13,16 или D1I−1M ′
x13,16имела максимальный ранг. Проверка показывает, что матрица
Якоби замены координат невырожденна в точке
xi = 0, i = 1, 16,
и, следовательно, в некоторой ее окрестности.
4. Линеаризация обратной связью
ПустьG— матрица, составленная из коэффициентов при управлении gij в системе
(13).
Выберем управление
u(z, η) = G−1(z, η)(−f(z, η)−Kz),
где
f(z, η) = (f1(z, η), . . . , fm(z, η))T,
K = diag(K1, . . . , KM), Ki = (ki0, . . . , ki,ri−1), kij = const.
Система (13), замкнутая этим управлением, совпадает с системой уравнений
zi(ri) +Kiz
i = 0, i = 1,m,
которая асимптотически устойчива при соответствующем выборе постоянных kij. По-
строим управления системой в форме обратной связи, позволяющие компенсировать
возможные отклонения получаемой траектории от положения равновесия. Потребу-
ем, чтобы компоненты zi подчинялись дифференциальному уравнению
zi + ki1zi + ki2zi = 0, i = 1, 4,
9

где коэффициенты kij выбраны так, что корни характеристического уравнения рас-
положены в левой половине комплексной плоскости. Запишем все четыре уравнения
в векторной форме
z +K1z +K2z = 0.
Подставив z из уравнений (13), получим
f +Gu+K1z +K2z = 0,
откуда
Gu = −f −K1z −K2z
и
u = G−1 (−f −K1z −K2z) .
Чтобы стабилизировать переменные z системы (12), необходимо, чтобы уравнение
λ2 + k1λ+ k2 = 0
имело отрицательные действительные корни или комплексные корни (если они есть)
с отрицательными действительными частями. Для моделирования выбраны коэф-
фициенты обратной связи:
K1 =
−2 0 0 0
0 −2 0 0
0 0 −2 0
0 0 0 −2
,
K2 =
−1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 −1
.
При данном выборе коэффициентов имеем корни характеристического уравнения
λi = −1, i = 1, 4.
10

5. Метод виртуальных выходов
Численное моделирование показывает, что нулевая динамика системы (5) в нор-
мальной форме (12) не является асимптотически устойчивой, то есть система с вы-
ходами (10) не является минимально-фазовой. Чтобы стабилизировать положение
равновесия по всем переменным, применим метод виртуальных выходов. Приведем
некоторые результаты из работы [10] в общем виде.
Рассмотрим стационарную аффинную систему с векторным управлением
(14) x = A(x) +m∑i=1
Bi(x)ui,
где x ∈ Rn, u = (u1, . . . , um)T ∈ Rrm, A(x) = (a1(x), . . . , an(x))T, A(0) = 0, B(x) =
(B1(x), . . . , Bm(x)), Bj(x) = (b1j(x), . . . , bnj (x))T, j = 1,m, rank B(0) = m, m > 2, ai(x),
bij(x) ∈ C∞(Ω), Ω — открытое множество, содержащее положение равновесия x = 0.
Для аффинной системы (14) фиксируем некоторый векторный виртуальный вы-
ход
(15) y = h(x) = (h1(x), . . . , hm(x))T,
при котором векторная относительная степень системы (14), (15) в точке x = 0
равна ρ = (2, . . . , 2), где |ρ| = 2m, т.е. ρi = 2, i = 1,m. Пусть распределение
G = span B1, . . . , Bm инволютивно. Запишем систему (14), (15) в соответствующей
нормальной форме:
(16)
z11 = z1
2 ,
z12 = f1(z, η) + g11(z, η)u1 + · · ·+ g1m(z, η)um,
. . .
zm1 = zm2 ,
zm2 = fm(z, η) + gm1(z, η)u1 + · · ·+ gmm(z, η)um,
η = q(z, η),
y = (z11 , z
21 , . . . , z
m1 )T,
где f = (f1, . . . , fm)T, f(0, 0) = 0, q(0, 0) = 0, z = (z11 , z
12 , . . . , z
m1 , z
m2 )T.
Будем предполагать, что нормальная форма определена в точке (z, η) = (0, 0) и
матрица (gij(0, 0))i,j=1,m невырожденна.
11

Те о р ем а 1. [10] Пусть управления v1 = v1(η), v2 = v2(η) стабилизируют
положение равновесия η = 0 системы
(17) η = q(v1, v2, η)
и удовлетворяет условию
(18)dv1(η)
dt
∣∣∣η=q(v1(η),v2(η),η)
= v2(η).
Если система (16) с виртуальным выходом φ(z, η) = z1 − v1(η) имеет векторную
относительную степень (2, . . . , 2) в точке (z, η) = 0, то нулевая динамика, соот-
ветствующая виртуальному выходу φ, асимптотически устойчива в точке η = 0.
Нахождение управлений v1 = v1(η), v2 = v2(η), удовлетворяющих первым двум
условиям теоремы (1), представляет собой трудную задачу. Поэтому можно исполь-
зовать следующую теорему о линеаризации нулевой динамики.
Те о р ем а 2. Пусть система (16) с выходом y = z1 имеет относительную сте-
пень ρ = (2, . . . , 2) в точке (z, η) = (0, 0), а линеаризация подсистемы η = q(z1, z2, η)
системы (16) в окрестности точки (z, η) = (0, 0) имеет вид
η = Aη +B1z1 +B2z
2,
где z1, z2 ∈ Rm, η ∈ Rl, l = n− 2m, A = ∂q∂η
∣∣∣z=0,η=0
, B1 = ∂q∂z1
∣∣z=0,η=0
, B2 = ∂q∂z2
∣∣z=0,η=0
.
Если существует матрица K, такая что матрица E + KB2 невырожденна, а
управления:v1 = −Kη,
v2 = (E +KB2)−1K(B1K − A)η
стабилизируют положение равновесия η = 0 системы
η = Aη +B1v1 +B2v
2,
то система (16) c виртуальным выходом φ = z1 + Kη имеет векторную относи-
тельную степень ρ = (2, . . . , 2) в точке (z, η) = (0, 0), а система нулевой динамики,
соответствующая этому выходу, асимптотически устойчива в точке η = 0.
Таким образом, задача поиска нового выхода сводится к поиску матрицы K, ко-
торая удовлетворяет неравенству
R = (A−B1K +B2(E +KB2)−1(−KA+KB1K)) < 0.
12
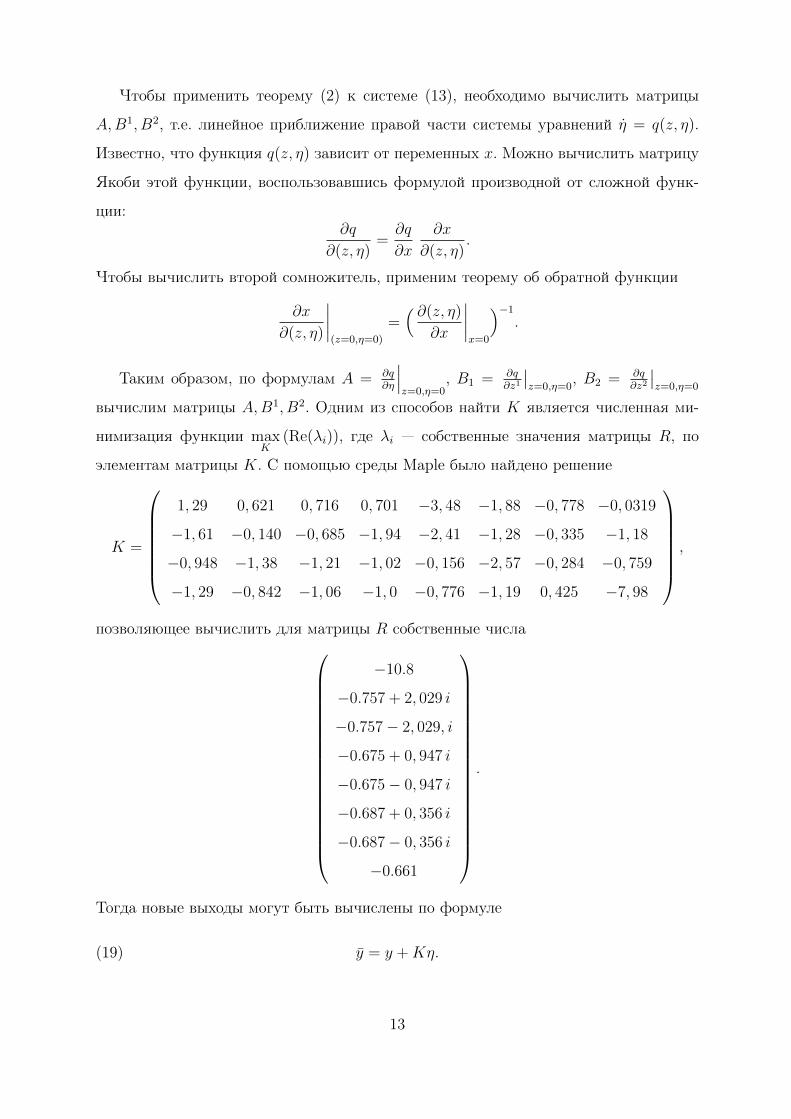
Чтобы применить теорему (2) к системе (13), необходимо вычислить матрицы
A,B1, B2, т.е. линейное приближение правой части системы уравнений η = q(z, η).
Известно, что функция q(z, η) зависит от переменных x. Можно вычислить матрицу
Якоби этой функции, воспользовавшись формулой производной от сложной функ-
ции:∂q
∂(z, η)=∂q
∂x
∂x
∂(z, η).
Чтобы вычислить второй сомножитель, применим теорему об обратной функции
∂x
∂(z, η)
∣∣∣∣(z=0,η=0)
=( ∂(z, η)
∂x
∣∣∣∣x=0
)−1
.
Таким образом, по формулам A = ∂q∂η
∣∣∣z=0,η=0
, B1 = ∂q∂z1
∣∣z=0,η=0
, B2 = ∂q∂z2
∣∣z=0,η=0
вычислим матрицы A,B1, B2. Одним из способов найти K является численная ми-
нимизация функции maxK
(Re(λi)), где λi — собственные значения матрицы R, по
элементам матрицы K. С помощью среды Maple было найдено решение
K =
1, 29 0, 621 0, 716 0, 701 −3, 48 −1, 88 −0, 778 −0, 0319
−1, 61 −0, 140 −0, 685 −1, 94 −2, 41 −1, 28 −0, 335 −1, 18
−0, 948 −1, 38 −1, 21 −1, 02 −0, 156 −2, 57 −0, 284 −0, 759
−1, 29 −0, 842 −1, 06 −1, 0 −0, 776 −1, 19 0, 425 −7, 98
,
позволяющее вычислить для матрицы R собственные числа
−10.8
−0.757 + 2, 029 i
−0.757− 2, 029, i
−0.675 + 0, 947 i
−0.675− 0, 947 i
−0.687 + 0, 356 i
−0.687− 0, 356 i
−0.661
.
Тогда новые выходы могут быть вычислены по формуле
(19) y = y +Kη.
13
Построим новую замену переменных:
z1−41 = y1−4,
z1−42 = ˙z1−4
1 ,
η = η.
Нормальная форма системы (5) будет иметь вид
(20)
z1−31 = z1−3
2 ,
z41 = z4
2 ,
z1−32 = f1−3(x) + g123(x)u ,
z42 = f4(x) + g4(x)u ,
˙η1−3 = x4−6 ,
˙η4 = D1x10,12 ,
˙η5−6 = D23x10,12 ,
˙η7−8 =˙D23x10,12 + D23J
−1b [Mb − x10,12 × Jbx10,12] .
Функции f(x) и g(x) вычислены с помощью системы Maple и не приводятся здесь
из-за громоздкости. Система (5), (19) является минимально-фазовой, т.е. ее нулевая
динамика является локально асимптотически устойчивой. После построения заме-
ны переменных, соответствующей выходам (19), переменные z могут быть стабили-
зированы линеаризацией обратной связью, т.е. достигается стабилизация нулевого
положения по всем переменным.
6. Результаты
Приведем графики переходного процесса, показывающие движение системы из
начального положения в положение равновесия. Достигнута стабилизация по всем
переменным (рис. 1—4).
Численное моделирование для различных начальных условий позволяет сделать
предположение о том, что система, замкнутая полученным управлением, устойчива
при начальных отклонениях от положения равновесия по углам ориентации верто-
лета менее 0,1 радиана.
Для сравнения приведем графики переменных нулевой динамики системы в нор-
мальной форме относительно выходов y = (x1, x2, x3, x7). Их вид позволяет предпо-
14
ложить, что положение равновесия нулевой динамики не является асимптотически
устойчивым (рис. 5 и 6).
7. Заключение
С помощью метода виртуальных выходов была решена задача стабилизации по-
ложения равновесия системы, описывающей движение вертолета. Исследованная си-
стема имеет самую большую размерность (16) из числа тех систем, к которым до
сих пор успешно применялся данный метод. В отличие от [3] учитываются аэродина-
мические силы, действующие на вертолет, рассматривается движение в трехмерном
пространстве, достигается стабилизация по всем переменным. Использование метода
виртуальных выходов позволило обойтись без применения линеаризации в окрест-
ности положения равновесия. При наличии подходящих программных траекторий
этот же подход может быть использован для их стабилизации, однако это затрудня-
ется тем, что новые выходы, относительно которых система является минимально-
фазовой, не имеют физического смысла (не соответствуют какой-либо переменной
состояния, а являются линейной комбинацией нескольких, часто всех, переменных
состояния).
СПИСОК ЛИТЕРАТУРЫ
1. Tanaka K., Ohtake H., Tanaka M., et al. A Takagi-Sugeno Fuzzy Model Approach
to Vision-Based control of a Micro Helicopter // Proc. 51st IEEE Conf. Decision and
Control (CDC). Maui, Hawaii, 2012. P. 6217–6222.
2. Isidori A. Robust Nonlinear Motion Control of a Helicopter // IEEE Trans. on
Automatic Control. 2003. V. 48. No. 3. P. 413–426.
3. Koo T.J, Sastry S. Output Tracking Control Design of a Helicopter Model Based on
Approximate Linearization // Proc. 37th IEEE Conf. Decision & Control. Tampa
(Florida, USA), 1998. V. 4. P. 3635–3640.
4. Isidori A. Nonlinear Control Systems. London: Springer-Verlag, 1995.
15
5. Крищенко А.П., Панфилов Д.Ю., Ткачев С.Б. Построение минимально-фазовых
аффинных систем //Дифф. уравнения. 2002. Т. 38. 11. С. 1483–1489.
6. Крищенко А.П., Панфилов Д.Ю., Ткачев С.Б. Глобальная стабилизация аффин-
ных систем с помощью виртуальных выходов // Дифф. уравнения. 2003. Т. 39.
11. С. 1503–1510.
7. Ткачев С.Б. Стабилизация неминимально фазовых аффинных систем с вектор-
ным управлением // Наука и образование. Электрон. журн. 2012. 10. URL:
http://technomag.edu.ru/doc/450613.html (дата обращения: 02.02.13). М: МГТУ
им. Н.Э. Баумана.
8. Шевляков А.А. Стабилизация аффинных систем с высоким индексом приводимо-
сти к квазиканоническому виду // Наука и образование. Электрон. журн. 2012.
9. URL: http://technomag.edu.ru/doc/467824.html (дата обращения: 02.02.13).
М.: МГТУ им. Н.Э. Баумана.
9. Gavrilets V., Mettler B., Feron E. Dynamic Model for a Miniature Aerobatic
Helicopter // MIT-LIDS report. 2003. No. LIDS-P-2580.
10. Ткачев С.Б. Стабилизация неминимально-фазовых аффинных систем методом
виртуальных выходов. Дисс. д-ра. физ.-мат. наук. М.: МГТУ им. Н.Э. Баумана,
2010.
16
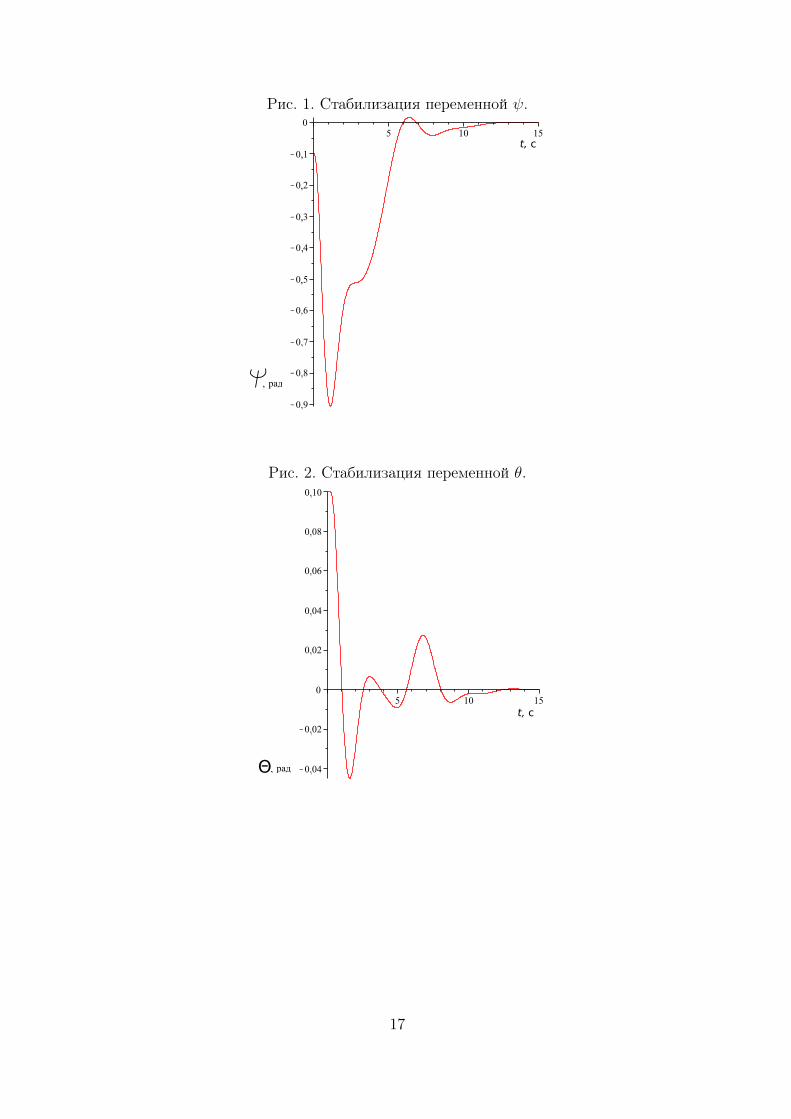
Рис. 1. Стабилизация переменной ψ.
t, с
Рис. 2. Стабилизация переменной θ.
t, с
Θ
17
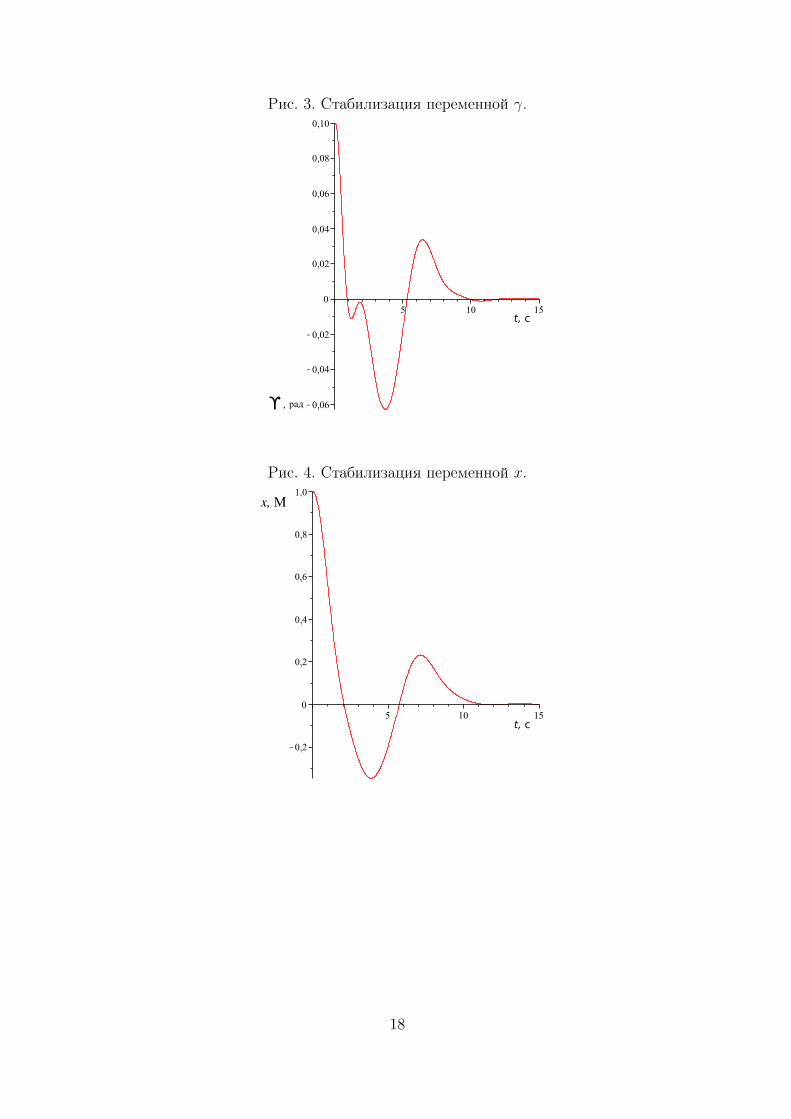
Рис. 3. Стабилизация переменной γ.
t, с
ϒ
Рис. 4. Стабилизация переменной x.
t, с
x, M
18
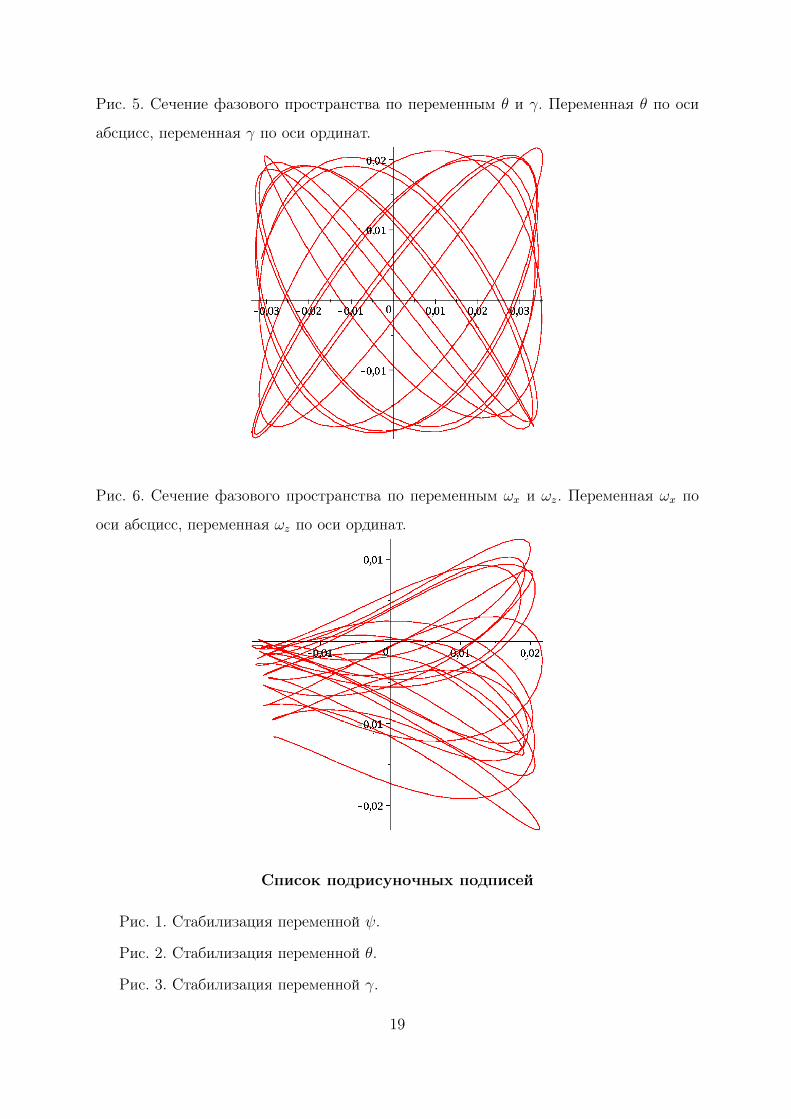
Рис. 5. Сечение фазового пространства по переменным θ и γ. Переменная θ по оси
абсцисс, переменная γ по оси ординат.
Рис. 6. Сечение фазового пространства по переменным ωx и ωz. Переменная ωx по
оси абсцисс, переменная ωz по оси ординат.
Список подрисуночных подписей
Рис. 1. Стабилизация переменной ψ.
Рис. 2. Стабилизация переменной θ.
Рис. 3. Стабилизация переменной γ.
19
Рис. 4. Стабилизация переменной x.
Рис. 5. Сечение фазового пространства по переменным θ и γ. Переменная θ по
оси абсцисс, переменная γ по оси ординат.
Рис. 6. Сечение фазового пространства по переменным ωx и ωz. Переменная ωx
по оси абсцисс, переменная ωz по оси ординат.
Шевляков А.А., Институт проблем управления им. В.А. Трапезникова РАН, и.о.
научного сотрудника, Москва, [email protected]
20
Related Documents











