SOUTH EASTERN KENYA UNIVERSITY DEPARTMENT OF PHYSICAL SCIENCES SPH 101: MECHANICS FIRST YEAR 1 ST SEMESTER JAN, 2013 Credit Hours: 3 Lecturer: Mr. Ngumbi, P.K Objective To provide fundamental aspects of mechanics and illustrate some of its basic phenomena Expected Learning Outcomes By the end of the course, the learner should be able to: • Describe unit and dimension of measurements and error analysis • State and prove the Newton’s laws of motion and state their applications in real life systems • Explain the conservation of energy and momentum and static equilibrium • Describe the plane motion and projectiles Course Assessment Examination - 70% CATs - 30% Total - 100% - References Halliday and resnik; (1988-). Fundamentals of physics. (3 rd ed.) N.Y. John Wiley. Mahendra K Verma; (2005). Introduction to Mechanics. University Press. Daniel Kleppner; (200). An Introduction to Mechanics; MC Graw Hill Science Engineering 1973- London Nelkon and parker; (1995). Advanced Level Physics. (7 th Ed.). Oxford: Heineman. U.S Department of war; (2005). Applied Physics For Airplane Mechanics . University Press. 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
SOUTH EASTERN KENYA UNIVERSITY
DEPARTMENT OF PHYSICAL SCIENCES
SPH 101: MECHANICS
FIRST YEAR 1ST SEMESTER JAN, 2013
Credit Hours: 3
Lecturer: Mr. Ngumbi, P.K
Objective
To provide fundamental aspects
of mechanics and illustrate some
of its basic phenomena
Expected Learning Outcomes
By the end of the course, the
learner should be able to:
• Describe unit and dimension
of measurements and error
analysis
• State and prove the Newton’s
laws of motion and state
their applications in real
life systems
• Explain the conservation of
energy and momentum and
static equilibrium
• Describe the plane motion and
projectiles
Course Assessment
Examination - 70%
CATs - 30%
Total - 100% -
References
Halliday and resnik; (1988-).
Fundamentals of physics. (3rd ed.)
N.Y. John Wiley.
Mahendra K Verma; (2005).
Introduction to Mechanics. University
Press.
Daniel Kleppner; (200). An
Introduction to Mechanics; MC Graw
Hill Science Engineering 1973-
London
Nelkon and parker; (1995).
Advanced Level Physics. (7th Ed.).
Oxford: Heineman.
U.S Department of war; (2005).
Applied Physics For Airplane Mechanics.
University Press.
1
COURSE CONTENT
1.0 Introduction
1.1. Units and Dimensions
1.1.1. Definitions
1.1.2. Basic units and
dimensions
1.1.3. Dimensional
analysis
1.1.4. Examples
1.2. Scalar and Vectors
1.2.1. Definition
1.2.2. Vector notation
and representation
1.2.3. Position vectors
1.2.4. Unit vectors
1.2.5. Vector operations
1.3. Composition and
resolution of coplanar
vector
2.0 Part II: Motion in 1-D
and 2-D
2.1 Introduction
2.2 Rectilinear motion
2.2.1 Distance and
displacement
2.2.2 Speed and
velocity
2.2.3 Position-time
graphs
2.2.4 Velocity-time
graphs
2.2.5 Acceleration
2.2.6 Relative velocity
2.3 Kinematic equations
2.4 Free fall
2.5 Projectile motion
3.0 Part III: Dynamics and
Statics
3.1 Force, Impulse.
3.2 Newton’s laws of motion
and their application.
3.3 Linear momentum and its
conservation.
3.4 Free body diagrams and
analysis
3.5 Moments, Couples, Torque
and Applications.
3.6 Center of gravity.
3.7 Work, Energy, Power,
Principle of conservation
of energy.
3.8 Elastic and inelastic
collision
2
3.9 Circular motion: Angular
velocity, angular
acceleration, rotation
with constant angular
acceleration.
3.10 Rotational motion of a
rigid body about a fixed
axis and Moments of
inertia.
3.11 Angular momentums and
its conservation.
Rotational kinetic energy.
3.12 Hydrostatics
3.12.1 Pressure in a
fluid.
3.12.2 Pressure gauges
3.12.3 Archimedes
Principle.
3.13 Hydrodynamics
3.13.1 Equation of
continuity
3.13.2 Bernouille’s
Principle
3.13.3 Applications
(Fluid flow, Pitot
tube, sprays)
3
AN OVERVIEW: INTRODUCTION
Definition of physics
Physics is defined as the study
of the laws that determine the
structure of the universe with
the reference to matter and
energy of which it consists.
Definition of mechanics
It is due study of the
interactions between matter and
the forces acting on matter.
There are three broad classes of
mechanics dealing with solid
bodies.
Kinematics- the study of motion
of bodies without reference to
the forces causing the motion
Dynamics- the study of motion
concerned with the action of
forces resulting in a change in
momentum.
Statics- the study concerned
with actional forces where there
is the change in momentum. i.e.
when a body is in equilibrium.
Physics and Units
It is a systematic study of the
laws. It is very closely
connected to measurements
For accurate reproducible
measurements, a frame of
reference is needed i.e. agreed
upon by every one.
These standard reference points
are called units. International
standard system currently in use
is the SI Units system. It is an
adaptation of the earlier mks
system
m-metre
k-kilogram
s-second
whereby four quantities are
added to the mks system to
produce the standard reference
system.
The table below compares the
first 3 basic quantities in four
stems
4
Quantity
System
SI mks scg Imperial
MASS kg kg g Poud (lb)

Measurements and Quantities
In physics we usually deal with
measurable quantities, for these
reasons unless dealing with
counting of parameters you will
be dealing with quantities.
A QUANTITY = A NUMBER + UNIT
Under the SI system of units,
the following are the seven
basic quantities measures
Derived Quantities
Any other quantities which could
be encountered can be derived
from the basic SI units. They
are hence referred to as derived
quantities and have derived
units.
Basic Units and Dimensions
The term dimension can be used
in two senses;
In the first sense, it refers to
the basic SI quantities; mass,
length, time, ….. etc.
In this sense it is said that
when any derived unit depends on
the rth power of the basic unit
it is said to be of r dimensions
in the basic unit.
Example
Therefore it
is said, area has two dimensions
in length.
Therefore it is said, area has
three dimensions in length.
We have a special type of
notation with units and
dimension involving i.e.
which refers to units
and or its dimensions in terms
5
Quantity SI Unit Abbr
e1 Mass Kilogram
me
kg
2 Length Metre m3 Time Second s4 Electric
current
Ampere A
5 Thermodynamic Kelvin K
of the basic units. This is
denoted in the following way for
the first three basic quantities
which we denote by the three
abbreviations M, L & T.
i.e.
When we express the derived
quantities, we express them
(usually) in terms of M, L & T
all together e.g.
These abbreviations can also be
used to represent the general
unit of the quantity in
question.
Hence
Thus
From this expression we should
see that the magnitude of area
is independent of mass and time
and depends only on the square
of the unit of length used.
Definition of dimensions
The dimensions of a physical
quantity are the powers which
the basic units must be raised
to express the quantity
completely.
Note on parameters ratios
Certain physical quantities are
measured by the ratio of two
similar quantities i.e. the two
similar quantities have the same
units and thus the quantity has
no units or dimensions e.g.
Strain, specific gravity,
Poisson’s ratio etc
The Dimension of Equation
(Dimensional analysis)
This is the relation stating the
units or dimensions of a derived
quantity in terms of the basic
units or dimensions. The
dimension of equation of a
quantity is found by expressing
6
it is in terms of other physical
quantities whose dimensions are
known.e.g.
or
So, the dimensions of ,
or
So, the dimensions of ,
In the SI system , .
So, in terms of basic units
In this way we can determine the
units of ant quantity which can
be expressed by a mathematical
relation.
Example
1. Show that the expression
is dimensionally
correct, where v represents
speed, acceleration, and
t a time interval.
2. Given that the equation
is dimensionally
correct and that and
have the dimensions of
length, determine the
dimensions of .
3. Hooke’s law states that the
force, F, in a spring
extended by a length is
given by . From
Newton’s second law ,
where is the mass and
is the acceleration,
calculate the dimension of
the spring constant .
4. The coefficient of thermal
expansion, of a metal
bar of length whose
length expands by when
its temperature increases
by is given by
7
. What are the
dimensions of ?
5. Suppose we are told that
the acceleration of a
particle moving with
uniform speed v in a circle
of radius r is proportional
to some power of r, say rn,
and some power of v, say vm.
How can we determine the
values of n and m?
Exercise .
Determine whether the following
equations are dimensionally
correct.
(a) The volume of a cylinder of
radius r and length h.,
.
(b) for an object with
initial speed u, (constant)
acceleration a and final speed v
after a time t.
(c) where E is energy, m
is mass and c is the speed of
light.
(d) , where c is the speed
of light, is the wavelength
and is the frequency
NB: Dimensional analysis is a
way of checking that equations
might be true. It does not prove
that they are definitely
correct.
SCALARS AND VECTORS
Definitions
At this level quantities can be
broadly separated into two types
Scalars:- a scalar is a quantity
which has magnitude but without
direction.
(e.g. Mass = 5 kg, Length = 1m
or Time = 2.5 s)
Vectors:-a vector is a quantity
which has both magnitude as well
as direction.
Consider length which is a
scalar (e.g. length of 1 m has
no direction). If we travel or
take this length in a particular
direction, then it becomes a8
vector. Examples of vector
include;
Displacement- distance travelled
in a particular direction e.g.
if you travel 100 metres east or
in any other direction this is a
vector.
Velocity- the rate of change of
displacement
Acceleration- the rate of change of
velocity e.t.c.
Mathematical Notation of Vectors
A vector being a quantity with
magnitude and direction, it can
be denoted in two ways
Graphically – using diagrams
Symbolically – using notation
Since a vector also includes
direction, it is important to
note that direction can only be
given with respect to a system
of reference. This system is
commonly referred to as the
coordinate system.
NB: (i) vector notation
A vector may be denoted by a
variable. There are special ways
of writing these variables. A
vector quantity A is written as
or . For our purpose we
shall denoted vector A as .
(a) Graphic Vectors I
Graphical description of vector
requires a frame of reference
especially for the vector
direction. The frame of
reference is the coordinate
system. There are three common
types:
Cartesian system
Cylindrical polar system
spherical polar system
We will only use the
system and although it is 3-
dimensional, one dimension
corresponds to a given direction
or along a straight line and two
dimensions correspond to a
plane.
In graphical method, a vector is
represented by a line with an
arrow at one end. The line is
9
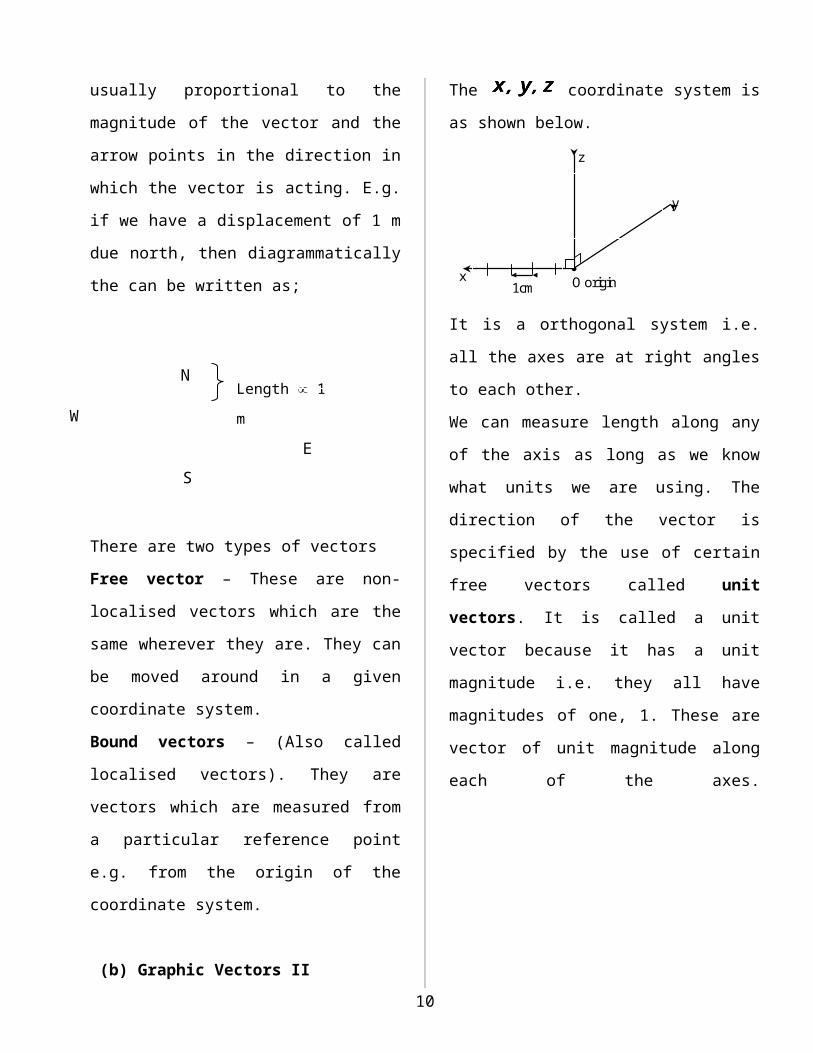
usually proportional to the
magnitude of the vector and the
arrow points in the direction in
which the vector is acting. E.g.
if we have a displacement of 1 m
due north, then diagrammatically
the can be written as;
There are two types of vectors
Free vector – These are non-
localised vectors which are the
same wherever they are. They can
be moved around in a given
coordinate system.
Bound vectors – (Also called
localised vectors). They are
vectors which are measured from
a particular reference point
e.g. from the origin of the
coordinate system.
(b) Graphic Vectors II
The coordinate system is
as shown below.
y
z
x
O origin 1cmy
It is a orthogonal system i.e.
all the axes are at right angles
to each other.
We can measure length along any
of the axis as long as we know
what units we are using. The
direction of the vector is
specified by the use of certain
free vectors called unit
vectors. It is called a unit
vector because it has a unit
magnitude i.e. they all have
magnitudes of one, 1. These are
vector of unit magnitude along
each of the axes.
10
Length ∝ 1
m
E
S
N
W
Distance between consecutive divisions ≡ 1 unit of length
z
x
y
k
i j
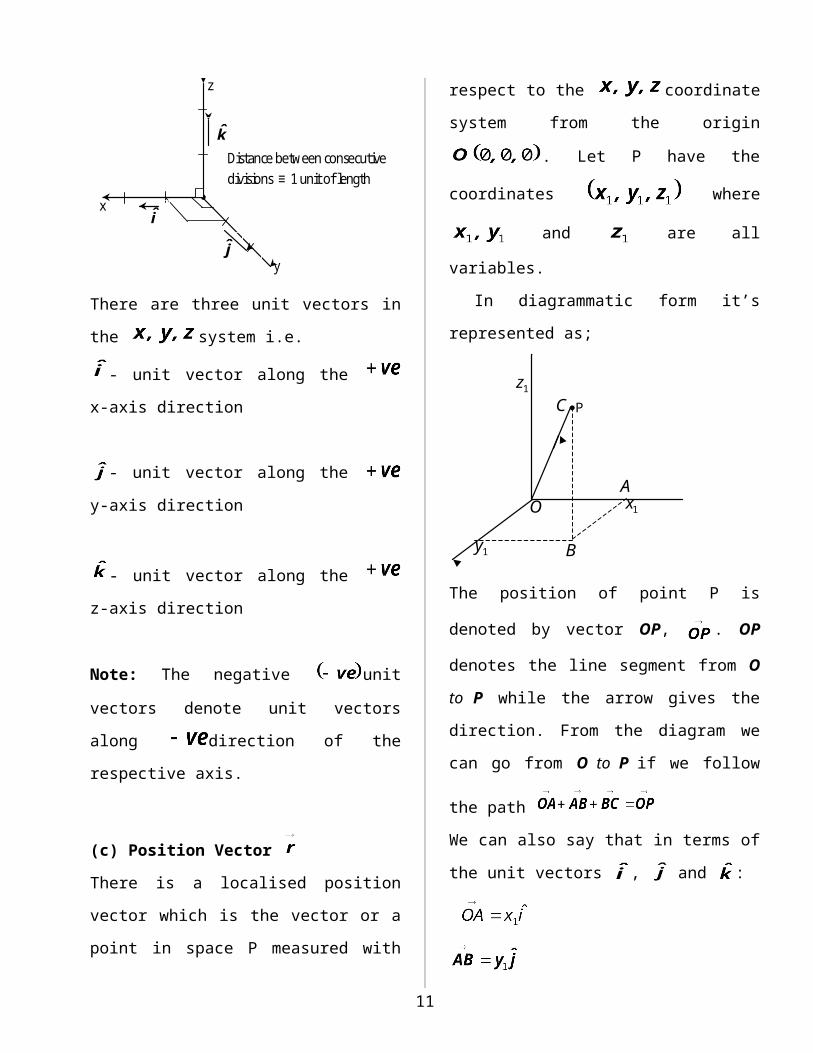
There are three unit vectors in
the system i.e.
- unit vector along the
x-axis direction
- unit vector along the
y-axis direction
- unit vector along the
z-axis direction
Note: The negative unit
vectors denote unit vectors
along direction of the
respective axis.
(c) Position Vector
There is a localised position
vector which is the vector or a
point in space P measured with
respect to the coordinate
system from the origin
. Let P have the
coordinates where
and are all
variables.
In diagrammatic form it’s
represented as;
P
1x
1y
1z
B
O A
C
The position of point P is
denoted by vector OP, . OP
denotes the line segment from O
to P while the arrow gives the
direction. From the diagram we
can go from O to P if we follow
the path
We can also say that in terms of
the unit vectors , and :
11

The position vector is generally
denoted (in most books as )
Symbolic Analysis
Components of a Vector.
Still refering to the same
diagram of OP, we can go from O
to P by travelling along or
parallel to the coordinate axis
i.e. by travelling distance; -
along the x-axis
- along the y-axis
- along the z-axis
The components of a vector are
the parts of the vector
travelled along a particular
coordinate axis. In this way a
three dimensional vector in
coordinate system is said
to have and components.
i.e.
the - components of
the - components of
the - components of
so that we can also describe the
component in the following i.e.
by using a subscript. e.g.
the - components of
the - components of
the - components of
so that it is also possible to
write as
Consider in 2-dimensions where P
has coordinates
But so,
Magnitude of Vectors
We have looked at the magnitude
of the part of a position
vector. These are the and
. We can now define the
magnitude of the total position
vector. The magnitude of OP is
simply the distance travelled
12

from O to P. i.e. It is denoted
by modulus of a vector
As , then or
Using Pythagoras theorem, we
can find the magnitude of in
both 3- and 2-dimensions.
In 3-dimensions
In 2-dimensions
But
and
so,
In 2-dimension, if OP makes an
angle with the x-axis, then
from trigonometry, it should be
apparent that,
or and
or
From which we get if we make the
coordinate variable the subject,
and
So in 2-dimension we can
further describe the position
vector in terms of as;
Unit Vectors
Vector quantities often are
expressed in terms of unit
vectors. A unit vector is a
dimensionless vector having a
magnitude of exactly 1. Unit
vectors are used to specify a
given direction and have no
other physical significance.
They are used solely as a
convenience in describing a
direction in space. It is
13

usually denoted by a hat or
caret. E.g. the unit vector
. If a vector has a unit
i.e , then it is also a
unit vector.
e.g. if , then the
unit vector is defined as
so as
then
Equality of Two Vectors
For many purposes, two vectors A
and B may be defined to be equal
if they have the same magnitude
and point in the same direction.
That is, only if and
if A and B point in the same
direction along parallel lines.
This property allows us to move
a vector to a position parallel
to itself in a diagram without
affecting the vector.
Vector Operations
Let there be vectors
Then the following are defined
Addition:
If
Then,
Grouping similar components and
operating on them accordingly
gives
Subs
tituting into both LHS and RHS
of components in terms of
component gives
For the equality to be true, the
coefficients of , and
must be equal. i.e.
14

Example
A particle undergoes three
consecutive displacements:
,
and
. Find the
components of the resultant
displacement and its magnitude.s
Example
A vector and
. Find the
values of m and n such that
.
Subtraction:
If
Note: subtraction of a vector is
the addition of a negative
vector
So we can rewrite as
The negative of a vector has the
same magnitude as the +ve vector
only that it acts on the
opposite direction. i.e. the
unit vectors are –ve. In
component form,
Grouping similar components on
RHS gives
Substituting into (2) in
component form gives
Which is only true if
Multiplication of a vector by a
scalar.
If
Where is a scalar
In component form we can write
(3) as
Simplifying the RHS gives
15

For this expression to be true,
the components on either side
must be equal to
Dot product (scalar product)
The dot product between two
vectors
and is denoted as and
is defined in the following
ways;
Definition 1
- the scalar and magnitude of
vector and
- the magnitude of vector
- the magnitude of vector
- the angle between and
Let us apply this definition to
the unit vector.
In this case (since unit
vectors have a unit magnitude.
In terms of the angle between
and in this case are parallel
vectors; such that the angle
between them is zero (0). i.e
.
So, or (since
)
so, from the sketch, ,
So, or (since )
It also follows that
It should be apparent that the
dot product of any two
perpendicular unit vector is
zero. Conversely,
Definition 2
16
Examples
17
Motion in 1-D and 2-D
Introduction
A body is said to be in motion
if it is continuously changing
its position w.r.t the
surrounding. E.g. a running
athlete, earth rotating round
the sun.
In our study of motion, we
describe the moving object as a
particle (point mass) regardless
of its size. This just means
that the object in question is
small in size compared to the
distance that it moves for the
times of interest.
The motion of a particle is
completely known if the
particle’s position in space is
known at all times.
A particles position is the
location of the particle w.r.t a
chosen reference point which is
considered to be the origin of
the coordinate system.
We shall describe motion in
terms of space and time while
ignoring the agents that caused
that motion. This portion of
classical mechanics is called
kinematics.
Motion in one dimension (linear
motion) and motion in two
dimensions (projectile motion) are
the subtitles of kinematics they
are also called as 1D and 2D
kinematics. Some mathematical
symbols, equations and graphics
will be used to show the
relations of basic concepts.
Types of motion
• Linear motion: A body is said
to be in linear motion if it
moves in a straight line
(rectilinear motion) or along
a curved path (curvilinear
motion).
• Rotational motion: Occurs when
a body stays in one place and
turns round about a fixed
18
axis. e.g. a fan, earth’s
rotation.
• Oscillatory: This is when a
body moves to and fro about a
mean position e.g. a pendulum.
Distance and Displacement
Distance is a scalar quantity
representing the interval
between two points. Measured in
metre
Displacement is a vector
quantity and can be defined as
distance between the initial
position to a final position
of an object. It must be the
shortest interval connecting the
initial and final points, which
is a straight line.
Changes in position are given by
changes in the value of and
written as .
The change in coordinate is
the displacement of the particle
and occurs over time interval
.
If a particle is moving, we can
easily determine its change in
position as it moves from an
initial position to a final
position .
Its displacement is given by
and written as
From this definition we see that
is positive if is greater
than and negative if is
less than . Displacements
have units of length (meters)
Speed and Velocity
Speed
Speed can be defined as “how
fast something moves” or it can
be explained more scientifically
as “the distance covered in a
unit of time” or rate of change
of distance. It is a scalar
quantity.
SI is
Velocity
19
This is the speed in a given
direction or simply the “rate of
change of displacement”.
Given that the displacement of a
body is and the time taken
is , then;
or SI is
NB: velocity can be:
Positive i.e. when the body
moves away from the reference
point or origin
Negative i.e. when the body
moves towards the reference
point or origin
Average and instantaneous
velocity
Average velocity for a particle
for the ratio of the particle’s
displacement to the time
interval during which that
displacement occurred: i.e
Average velocity tell us about
the average behavior of a body
during the given time interval.
Instantaneous velocity is the
velocity a body at a given
instant of time. It is gotten by
the gradient to the curve at the
point of interest.
It is given by
In the language of calculus,
instantaneous velocity is given
by the limit
.
This is a derivative of w.r.t
Examples
1. A particle moves along the x
axis. Its coordinate varies
with time according to the
expression where
is in meters and is in
seconds.
20
(a) Determine the
displacement of the
particle in the time
intervals and
(b) Calculate the average
velocity during these two
time intervals.
(c) Find the instantaneous
velocity of the particle at
2. A car travels 17 km due east,
then does a U-turn, and
travels 23 km due west.
(a) What total distance has the
car traveled?
(b) What is the total
displacement of the car?
(c) If the entire trip took 2.0
hours, determine the average
speed of the car.
(d) If the entire trip took 2.0
hours, determine the average
velocity of the car
3. If a car moves 150m to the
east and then 70m to the west,
calculate the average speed
and velocity of the car if the
travel takes10 seconds.
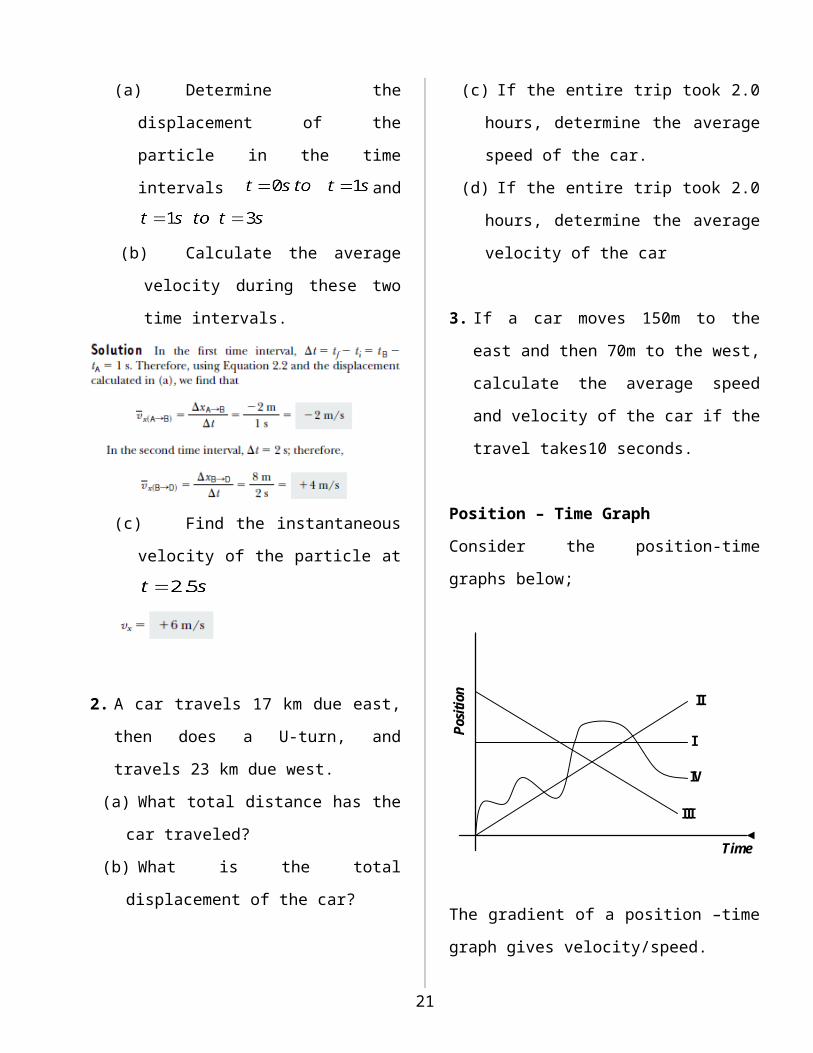
Position – Time Graph
Consider the position-time
graphs below;
II
I
III
IV
Time
Posit
ion
The gradient of a position –time
graph gives velocity/speed.
21
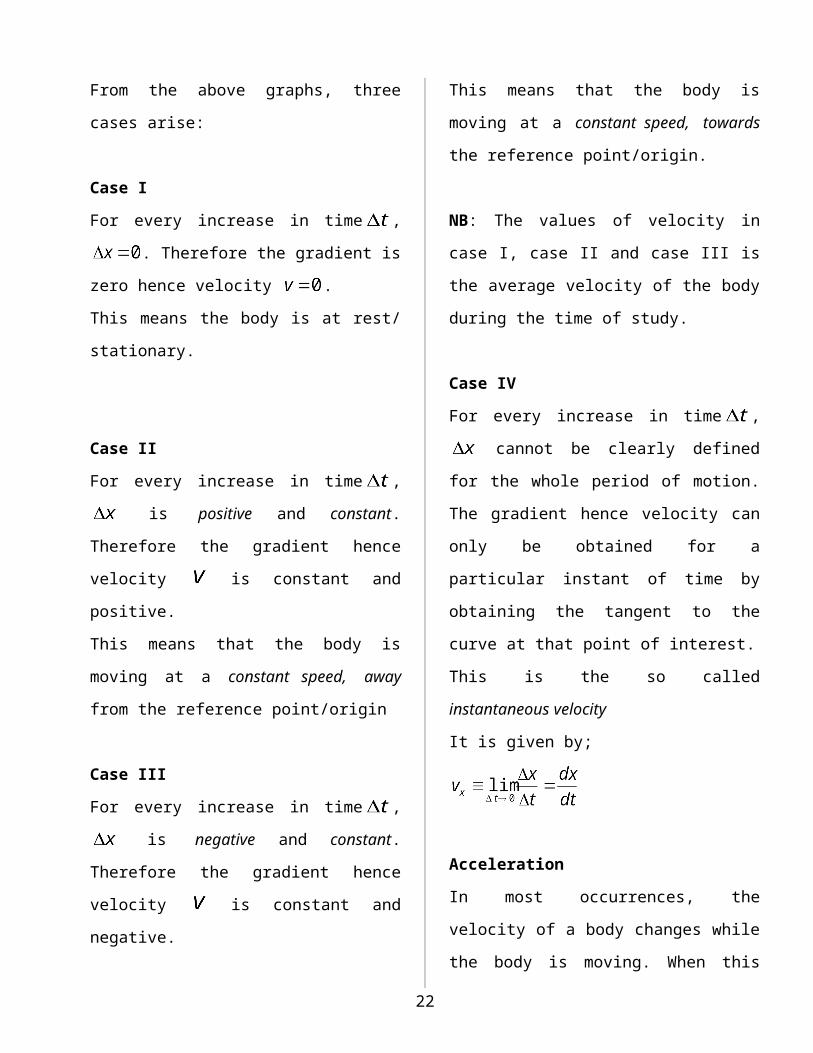
From the above graphs, three
cases arise:
Case I
For every increase in time ,
. Therefore the gradient is
zero hence velocity .
This means the body is at rest/
stationary.
Case II
For every increase in time ,
is positive and constant.
Therefore the gradient hence
velocity is constant and
positive.
This means that the body is
moving at a constant speed, away
from the reference point/origin
Case III
For every increase in time ,
is negative and constant.
Therefore the gradient hence
velocity is constant and
negative.
This means that the body is
moving at a constant speed, towards
the reference point/origin.
NB: The values of velocity in
case I, case II and case III is
the average velocity of the body
during the time of study.
Case IV
For every increase in time ,
cannot be clearly defined
for the whole period of motion.
The gradient hence velocity can
only be obtained for a
particular instant of time by
obtaining the tangent to the
curve at that point of interest.
This is the so called
instantaneous velocity
It is given by;
Acceleration
In most occurrences, the
velocity of a body changes while
the body is moving. When this
22
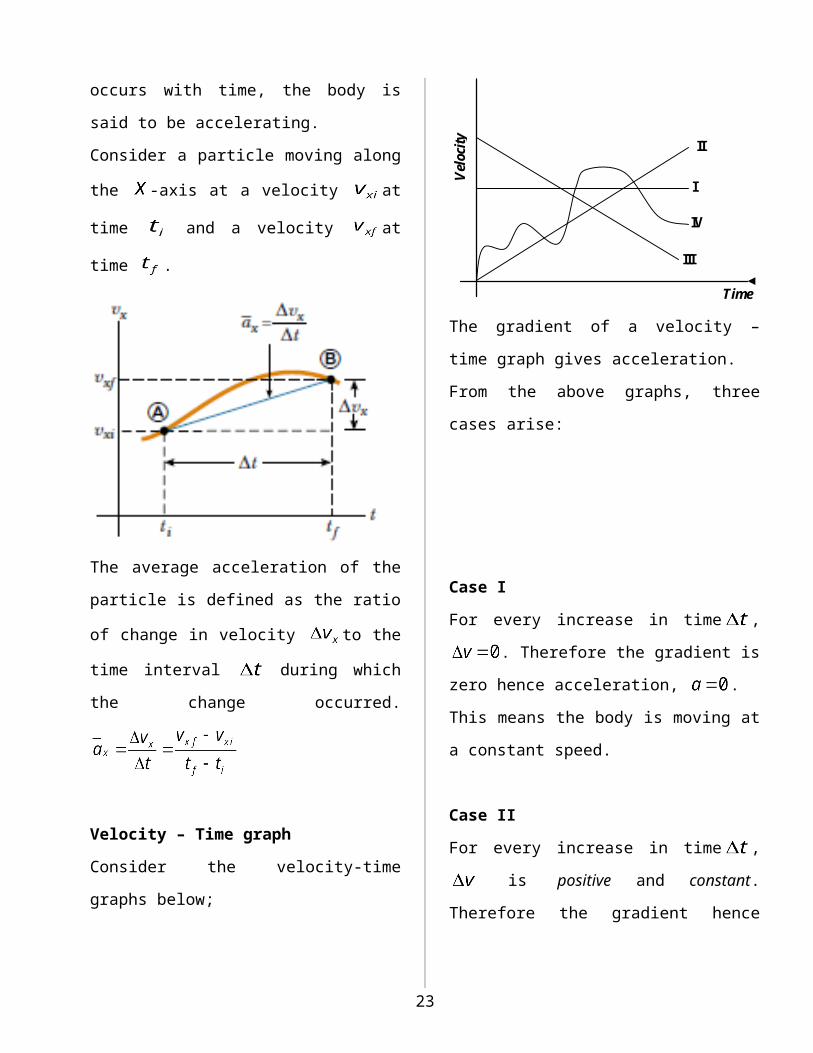
occurs with time, the body is
said to be accelerating.
Consider a particle moving along
the -axis at a velocity at
time and a velocity at
time .
The average acceleration of the
particle is defined as the ratio
of change in velocity to the
time interval during which
the change occurred.
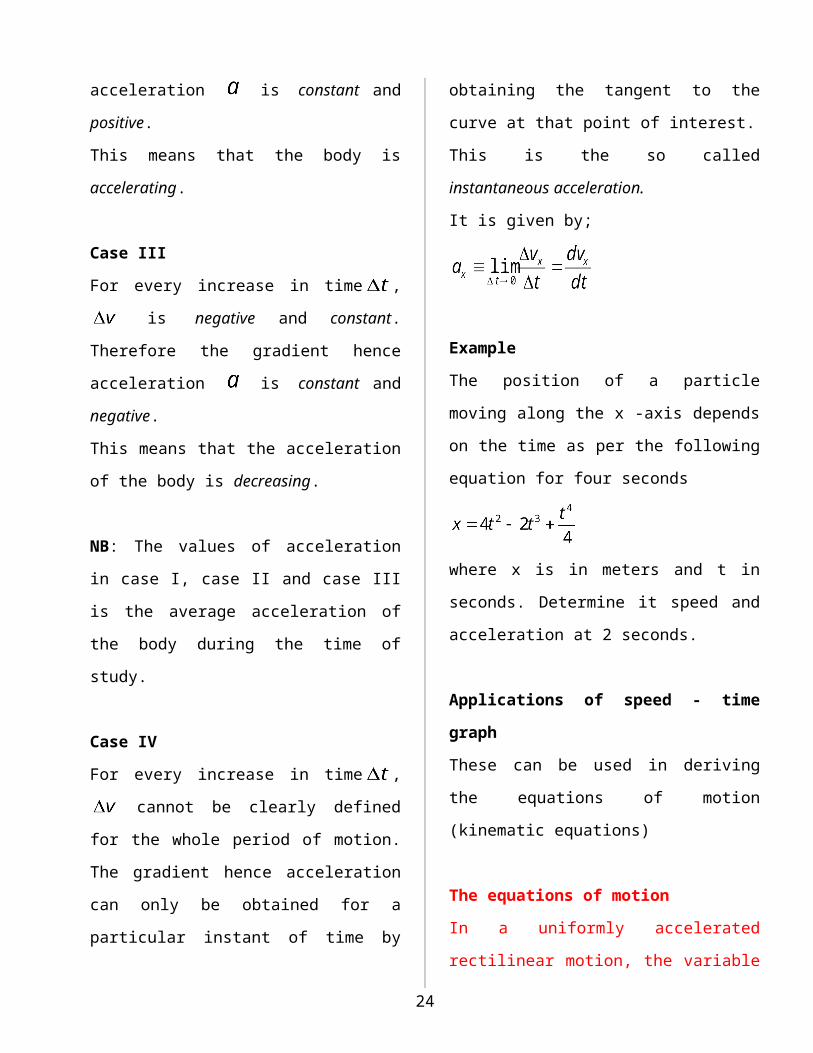
Velocity – Time graph
Consider the velocity-time
graphs below;
II
I
III
IV
Time
Velo
city
The gradient of a velocity –
time graph gives acceleration.
From the above graphs, three
cases arise:
Case I
For every increase in time ,
. Therefore the gradient is
zero hence acceleration, .
This means the body is moving at
a constant speed.
Case II
For every increase in time ,
is positive and constant.
Therefore the gradient hence
23
acceleration is constant and
positive.
This means that the body is
accelerating.
Case III
For every increase in time ,
is negative and constant.
Therefore the gradient hence
acceleration is constant and
negative.
This means that the acceleration
of the body is decreasing.
NB: The values of acceleration
in case I, case II and case III
is the average acceleration of
the body during the time of
study.
Case IV
For every increase in time ,
cannot be clearly defined
for the whole period of motion.
The gradient hence acceleration
can only be obtained for a
particular instant of time by
obtaining the tangent to the
curve at that point of interest.
This is the so called
instantaneous acceleration.
It is given by;
Example
The position of a particle
moving along the x -axis depends
on the time as per the following
equation for four seconds
where x is in meters and t in
seconds. Determine it speed and
acceleration at 2 seconds.
Applications of speed - time
graph
These can be used in deriving
the equations of motion
(kinematic equations)
The equations of motion
In a uniformly accelerated
rectilinear motion, the variable
24
quantities are time, velocity,
displacement and acceleration.
The equations of motion are
simple relations that exist
between these quantities.
The following are the three
equations of motion:
i.
ii.
iii.
Derivation of the First Equation
of Motion
Consider a particle moving along
a straight line with uniform
acceleration 'a'. At t = 0, let
the particle be at A and be
its initial velocity and time t,
v be its final velocity.
…………………… (i)
Second Equation of Motion
…….1
Average velocity can also be
written as
…….2
From equations (1) and (2)
……3
The first equation of motion is
Substituting the value of v in
equation (3), we get
……… (ii)
Third Equation of Motion
The first equation of motion is
.
. .. .. .. ……………………….….
(a)
25

………………………. (b)
………………….
(c)
From equation (b) and equation
(c) we get,
…………………...….. (d)
Multiplying equation (a) and
equation (d) we get,
…………… (iii)
Derivations of Equations of
Motion (Graphically)
First Equation of Motion
A
t time
velo
city
y B v
u C
D x O
Consider an object moving with a
uniform velocity in a straight
line. Let it be given a uniform
acceleration ‘ ’ at time
when its initial velocity is .
As a result of the acceleration,
its velocity increases to
(final velocity) in time .
Slope of the v - t graph gives the
acceleration of the moving
object.
Thus, acceleration = slope = AB
=
………….. (i)
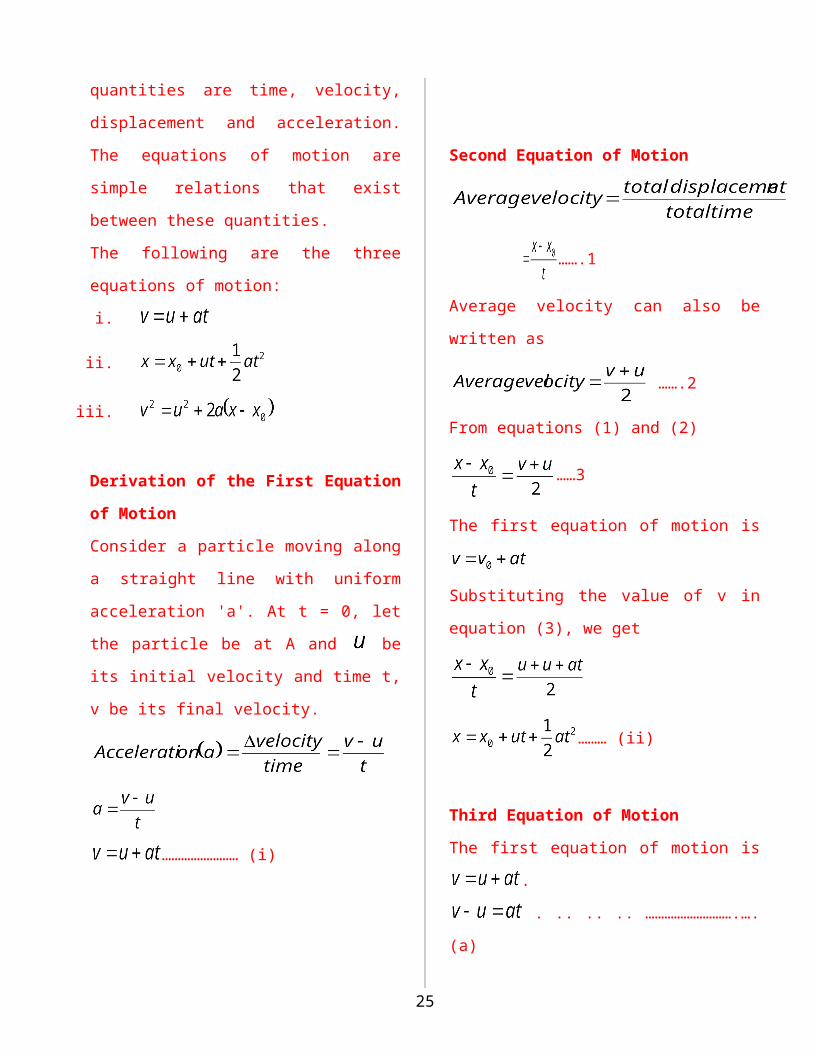
Second Equation of Motion
Let be the initial velocity
of an object and ' ' the
acceleration produced in the
body. The displacement in time
is given by the area enclosed
by the velocity-time graph for
the time interval 0 to t.
26
Distance travelled S = area ABDO
of the trapezium
S = area of rectangle ACDO +
area of DABC
(v = u + at in equation (i) of
motion; v - u = at)
……………………….. (ii)
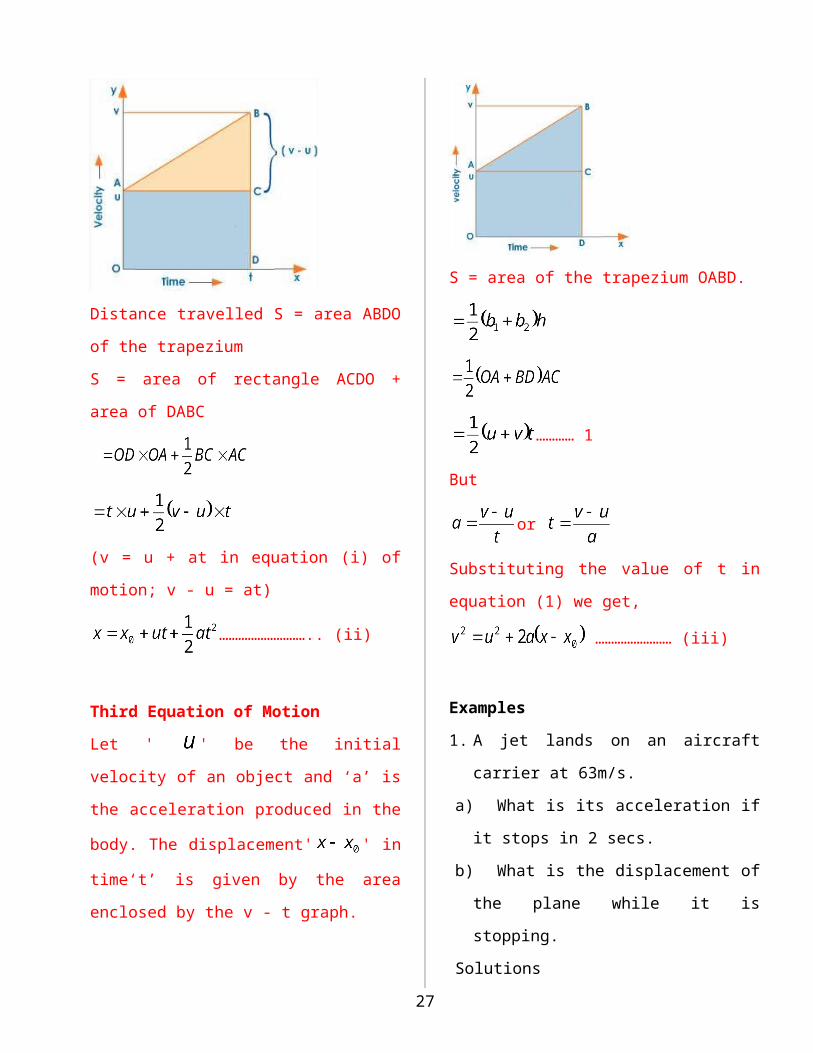
Third Equation of Motion
Let ' ' be the initial
velocity of an object and ‘a’ is
the acceleration produced in the
body. The displacement' ' in
time‘t’ is given by the area
enclosed by the v - t graph.
S = area of the trapezium OABD.
………… 1
But
or
Substituting the value of t in
equation (1) we get,
…………………… (iii)
Examples
1. A jet lands on an aircraft
carrier at 63m/s.
a) What is its acceleration if
it stops in 2 secs.
b) What is the displacement of
the plane while it is
stopping.
Solutions
27
2. A car traveling at a constant
speed of 45m/s passes a
trooper hidden behind a
billboard. One second after
the speeding car passes the
billboard, the trooper sets
out from the billboard to
catch it, accelerating at a
constant rate of 3m/s2. How
long does it take her to
overtake the car?
Relative Velocity
Relative velocity: Is the velocity of
one object relative to
another’s point of view
Reference Frame: The frame of
reference for the observer’s
point of view - the observer
will always be at rest in
his/her frame of reference.
Relative velocity of an object
moving relative to an observer
is determined by subtracting
vectors. i.e.
Consider two cars, car A moving
at velocities VA to the right
and car B moving at VB to the
left. VB
VA VAVA
Determine the velocity of
a) B relative to A
b) A relative to B
a) Here we find the velocity
that B appears to be moving
at when A is the frame of
reference (i.e to someone in
A)
Car B is in the opposite
direction of A hence its
velocity is negative.
28
b) Here we find the velocity
that A appears to be moving
at when B is the frame of
reference (i.e to someone in
B)
Car B is in the opposite
direction of A hence its
velocity is negative.
Example
Free Falling Bodies
A freely falling object is any
object moving freely under the
influence of gravity alone,
regardless of its initial
motion. Objects thrown upward or
downward and those released from
rest are all falling freely once
they are released. Any freely
falling object experiences
acceleration directed downward,
regardless of its initial
motion.
If we neglect air resistance and
assume that the free-fall
acceleration does not vary with
altitude over short vertical
distances, then the motion of a
freely falling object moving
vertically is equivalent to
motion in one dimension under
constant acceleration. The
equations of motion developed
for objects moving with constant
acceleration can be applied.
Down ward
motion
i.
ii.
iii.
Upward motion
29
i.
ii.
iii.
Examples
1. A stone thrown from the top of
a building is given an initial
velocity of 20.0 m/s straight
upward. The building is 50.0 m
high, and the stone just
misses the edge of the roof on
its way down, as shown in
Figure below. Using tA=0 as the
time the stone leaves the
thrower’s hand at position A,
determine the;
(a) Time at which the
stone reaches its maximum
height,
(b) Maximum height,
(c) Time at which the
stone returns to the height
from which it was thrown,
(d) Velocity of the stone
at this instant
Solution
a) Initial velocity=20 m/s
Final velocity=0
To calculate the time t B at which the
stone reaches maximum height, we
use equation
b)
c) When the stone is back at the height
from which it was thrown the y
coordinate is again zero.
This is a quadratic equation and so
has two solutions One solution is t=0
corresponding to the time the stone
starts its motion. The other solution is
t=4.08s which is the solution we are
after.
d) Velocity at t=4.08s
30
but
displacement at point of throw is
zero. Hence
+20m/s is the initial velocity of the
body moving upwards while -20m/s
is the velocity of the falling object at
the point of throw.
The body hits the point of throw with
a velocity equal in magnitude but
opposite in direction to the initial
velocity.
2. A ball thrown vertically
upward is caught by the
thrower after 20.0 s. Find
(a) the initial velocity
of the ball and,
(b) the maximum height it
reaches.
3. A ball is thrown vertically
upward from the ground with an
initial speed of 15.0 m/s.
(a) How long does it take
the ball to reach its
maximum height?
(b) What is its maximum
height?
(c) Determine the velocity
and acceleration of the
ball at t = 2.00 s.
4. A ball is dropped from rest
from a height h above the
ground. Another ball is thrown
vertically upward from the
ground at the instant the
first ball is released.
Determine the speed of the
second ball if the two balls
are to meet at a height h/2
above the ground.
5. A stone is dropped from the
top of a 95 m building. A
second stone is dropped 0.75 s
later. How far from the ground
is the second stone when the
first stone hits the ground?
31
6. A student through a stone
vertically upwards from the
base of a 51 m building at the
same time a second student on
the top of the building drops
a stone. If the two stones
collide 12 m from the ground,
what was the initial velocity
of the thrown stone?
7. A model rocket is launched
straight upward with an
initial speed of 50.0 m/s. It
accelerates with a constant
up-ward acceleration of 2.00
m/s2 until its engines stop at
an altitude of 150 m.
(a) What can you say about the
motion of the rocket after
its engines stop?
(b) What is the maximum height
reached by the rocket?
(c) How long after lift-off
does the rocket reach its
maximum height?
(d) How long is the rocket in
the air?
8. How long does it take to
travel 3.0 km if you are
traveling at a constant speed of
20 m/s?
9. A stone thrown vertically
downwards from the top of a
building at a velocity of
5.0m/s. this stone is observed
passing by a window that has a
height of 2.0 m. assuming that
the bottom of the window is 25
m from the ground, how long
does it take for the stone to
pass by the window
10. A ball is dropped from a
very high ledge.
a) how far does it travel in
the first 3.0 seconds?
b) how fast is it moving at
that time?
11. A car traveling at 40 m/s
hits the brakes when it sees a
red light 100 meters away.
What acceleration is required
32
in order for the car to stop
before it reaches the light?
12. A ball is thrown upwards at
23 m/s. How far up does it
go?
13. A ball which is thrown
straight upward reaches a
height of 26 meters. At what
speed was it thrown? How much
time elapses before it returns
to the point where it was
thrown?
14. A rocket speeds up
uniformly from 120 m/s to 160
m/s during a 10 second
interval. How far does it
travel during this time?
15. A ball is dropped over the
edge of a building. How fast
is the ball moving 2.0 seconds
after being dropped? v=19.6
m/s
16. A rock is dropped from a
bridge that is 28 meters above
a river. How long does it
take the rock to hit the
water? t=2.39 s
17. A lacrosse ball that is
thrown straight upwards
reaches a maximum height of
4.5 meters. At what speed was
it thrown? vo=9.39 m/s
18. A soccer player heads the
ball and sends it flying
vertically upwards at a speed
of 12.0 m/s. How high above
the players’ head does the
ball travel? d=7.35 m
19. A snow ball is thrown
upward at a speed of 27 m/s.
How high (above the position
from which it was thrown) is
the snow ball 3.5 seconds
later? Also, how fast is it
moving at that time? In what
33
direction? d=34.5m, v=7.3 m/s
down
20. A mis-hit golf ball flies
straight up in the air.
Exactly 4.0 seconds later it
lands right next to the tee.
How high up did the golf ball
go? d=19.6 m
21. A cliff diver on an alien
planet dives off of a 32 m
tall cliff and lands in a sea
of hydrochloric acid 1.20
seconds later. Assuming that
the extra-terrestrial’s
initial speed was zero, what
is the free fall acceleration
of this strange world? g =
44.4 m/s2
22. Two people are standing on
the edge of a building that is
42 meters high (back on
earth!). One person throws a
tennis ball straight downward
at a speed of 16 m/s. At the
same exact time, the other
person throws a tennis ball
straight upward at 16 m/s.
How long after the first
tennis ball lands will the
second tennis ball arrive at
the ground? t2-t1= (4.985 s) –
(1.719 s) = 3.27 s
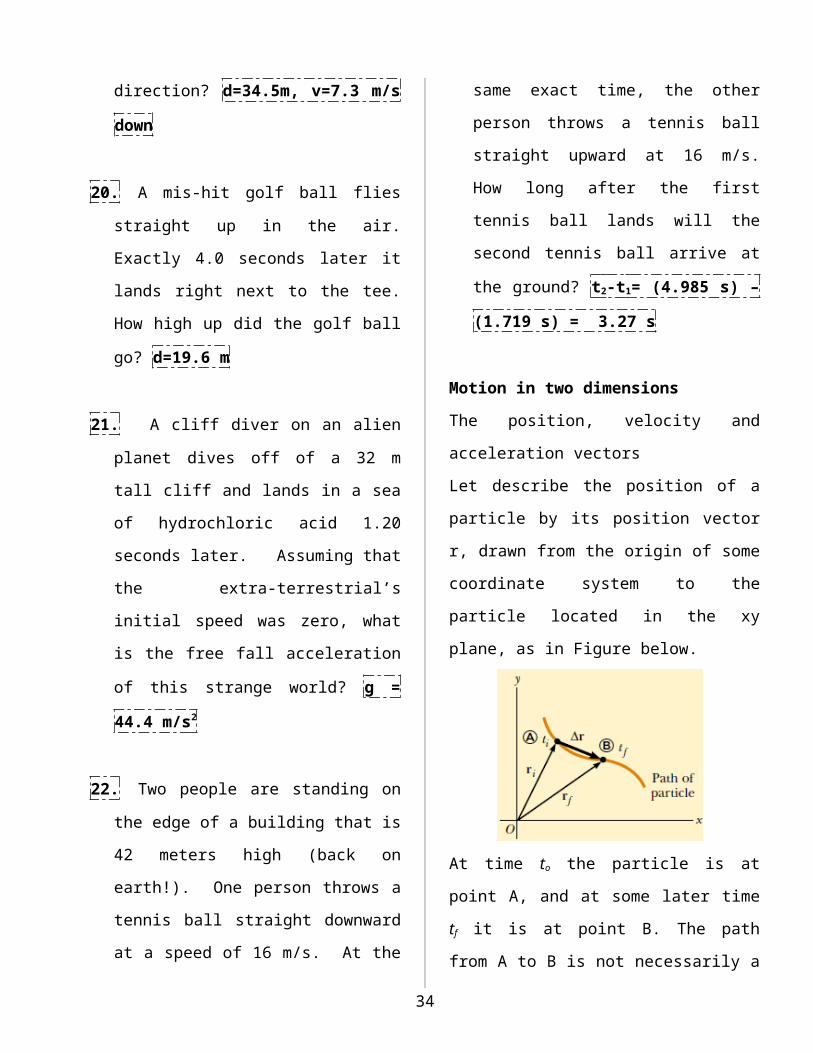
Motion in two dimensions
The position, velocity and
acceleration vectors
Let describe the position of a
particle by its position vector
r, drawn from the origin of some
coordinate system to the
particle located in the xy
plane, as in Figure below.
At time to the particle is at
point A, and at some later time
tf it is at point B. The path
from A to B is not necessarily a
34
straight line. As the particle
moves from A to B in the time
interval its position vector
changes from ro to rf.
displacement is a vector
quantity and the displacement of
the particle is the difference
between its final position and
its initial position. We now
formally define the displacement
vector for the particle as
being the difference between its
final position vector rf and its
initial position vector ro:
We define the velocity of a
particle during the time
interval as the displacement
of the particle divided by that
time interval:
Multiplying or dividing a vector
quantity by a scalar quantity
changes only the magnitude of
the vector, not its direction.
Because displacement is a vector
quantity and the time interval
is a scalar quantity, we
conclude that the average
velocity is a vector quantity
directed along .
The instantaneous velocity v is
defined as the limit of the
average velocity as
approaches zero:
That is, the instantaneous
velocity equals the derivative
of the position vector with
respect to time. The direction
of the instantaneous velocity
vector at any point in a
particle’s path is along a line
tangent to the path at that
point and in the direction of
motion. The magnitude of the
instantaneous velocity vector is
called the speed.
As a particle moves from one
point to another along some
path, its instantaneous velocity
vector changes from vo at time to
35
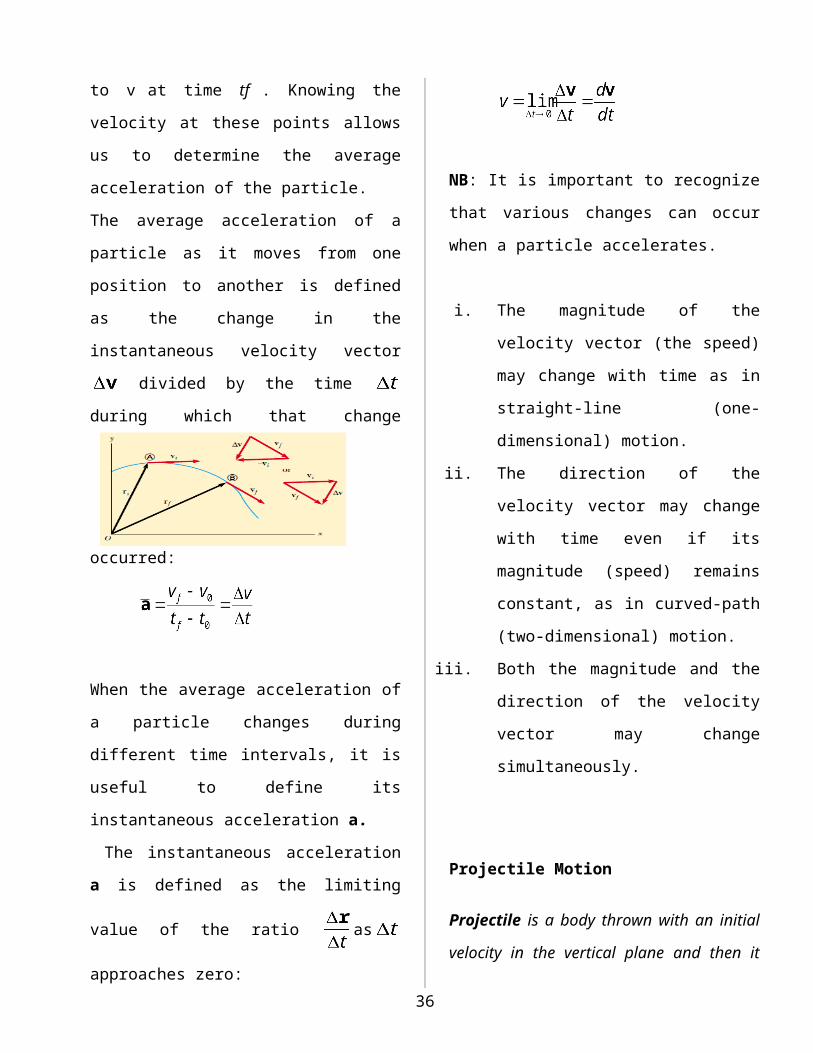
to v at time tf . Knowing the
velocity at these points allows
us to determine the average
acceleration of the particle.
The average acceleration of a
particle as it moves from one
position to another is defined
as the change in the
instantaneous velocity vector
divided by the time
during which that change
occurred:
When the average acceleration of
a particle changes during
different time intervals, it is
useful to define its
instantaneous acceleration a.
The instantaneous acceleration
a is defined as the limiting
value of the ratio as
approaches zero:
NB: It is important to recognize
that various changes can occur
when a particle accelerates.
i. The magnitude of the
velocity vector (the speed)
may change with time as in
straight-line (one-
dimensional) motion.
ii. The direction of the
velocity vector may change
with time even if its
magnitude (speed) remains
constant, as in curved-path
(two-dimensional) motion.
iii. Both the magnitude and the
direction of the velocity
vector may change
simultaneously.
Projectile Motion
Projectile is a body thrown with an initial
velocity in the vertical plane and then it
36
moves in two dimensions under the action
of gravity.
Its motion is called projectile
motion. The path of a projectile
is called its trajectory.
Examples: A golf ball in flight, a bullet
fired from a rifle and a jet of water from a
hole near the bottom of a water tank.
Projectile motion is a case of two-
dimensional motion. In dealing
with projectile motion two
assumptions are made
• The free fall acceleration g is constant
over the range of motion and is
directed down ward
• The effect of air resistance is negligible.
With these assumptions, we find
that the path of a projectile is
a parabola. To show that the
trajectory of a projectile is a
parabola, let us choose our
reference frame such that the y
direction is vertical and
positive is upward. Because air
resistance is neglected, we know
that and that
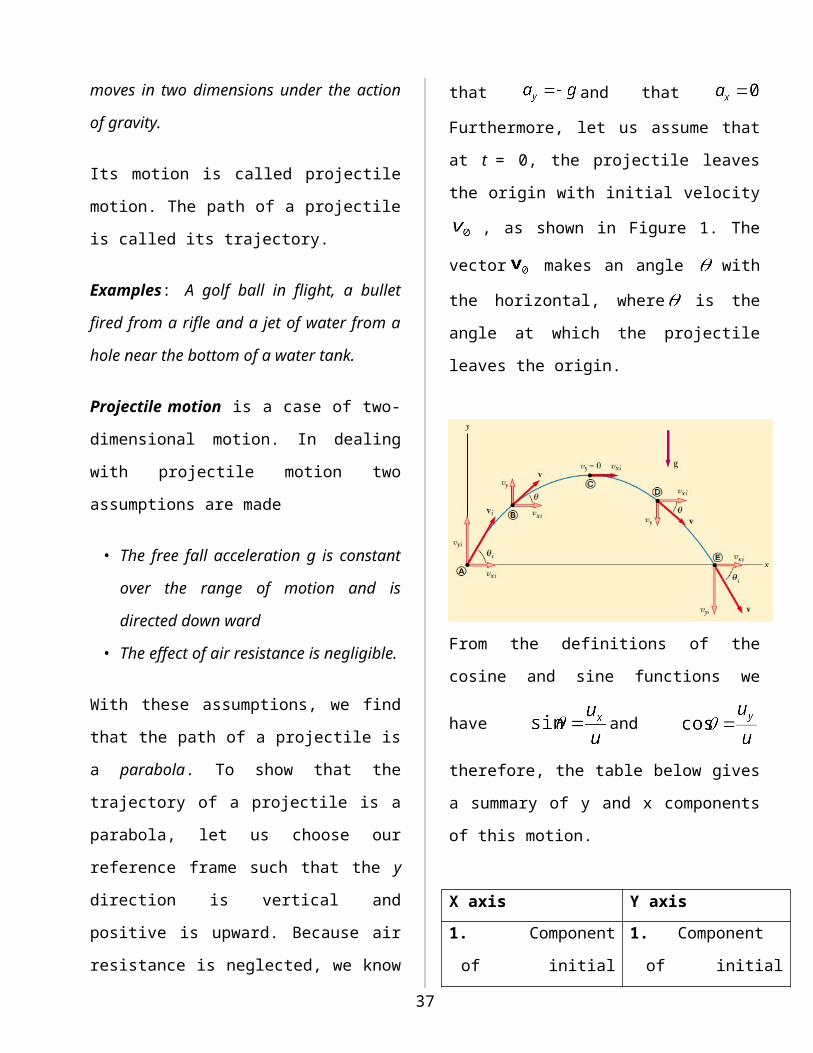
Furthermore, let us assume that
at t = 0, the projectile leaves
the origin with initial velocity
, as shown in Figure 1. The
vector makes an angle with
the horizontal, where is the
angle at which the projectile
leaves the origin.
From the definitions of the
cosine and sine functions we
have and
therefore, the table below gives
a summary of y and x components
of this motion.
X axis Y axis1. Component
of initial
1. Component
of initial
37
velocity along
x-axis.
velocity along
y-axis.
2. Velocity
component along
the x-axis at any
instant t.
This means that
the horizontal
component of
velocity does not
change throughout
the projectile
motion
2. Velocity
component
along the y-
axis at any
instant t.
3. Displacement
along x-axis at
any time t
3. Displacement
along y-axis
at any time t
Net velocity at any instant of
time t
………………………………2
Where is the
angle that the resultant
velocity (v) makes with the
horizontal at any instant?
Time to reach the maximum height
Angular Projectile motion is
symmetrical about the highest
point. The object will reach the
highest point in time . At the
highest point, the vertical
component of velocity becomes
equal to zero.
At
Time of Flight T
38
Angular Projectile motion is
symmetrical about the highest
point. The object will reach the
highest point in time .At
the highest point, the vertical
component of velocity becomes
equal to zero.
At
……………………………..3
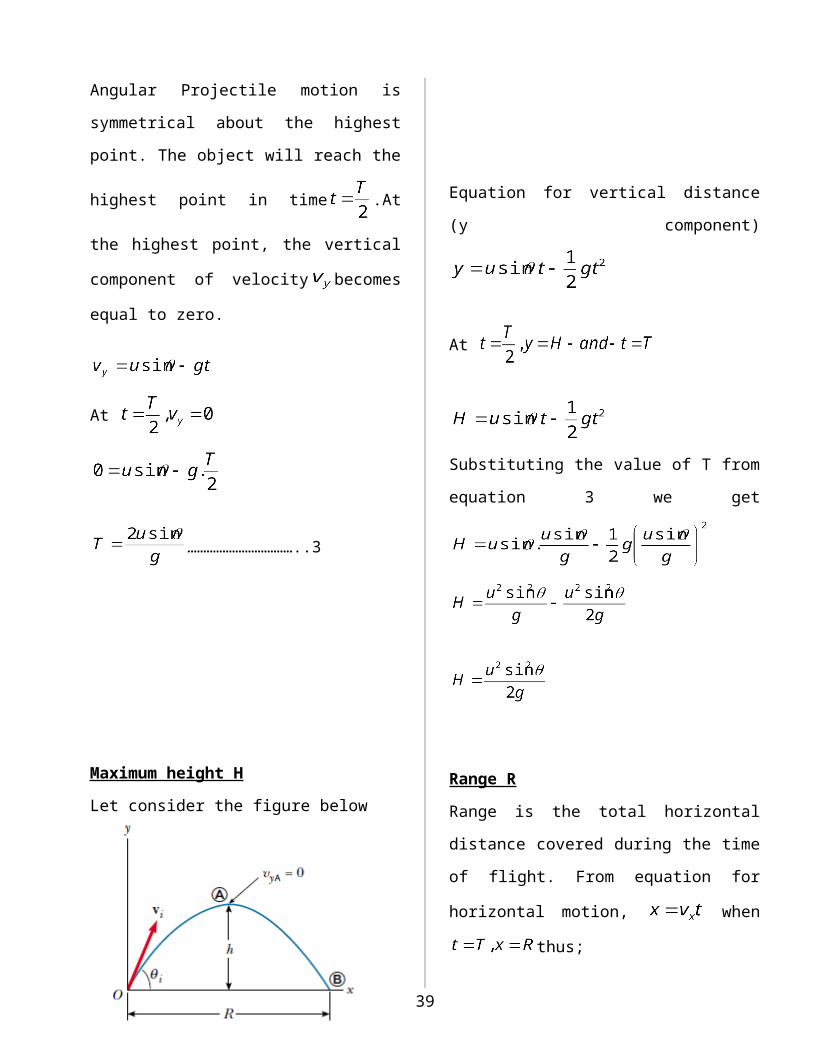
Maximum height H
Let consider the figure below
Equation for vertical distance
(y component)
At
Substituting the value of T from
equation 3 we get
Range R
Range is the total horizontal
distance covered during the time
of flight. From equation for
horizontal motion, when
thus;
39

Using the trigonometric identity
The maximum value of R from
Equation above is . This
result follows from the fact
that the maximum value of
is 1, which occurs when .
Therefore, R is a maximum when
. In addition, a point
having Cartesian coordinates (R,
0) can be reached by using
either one of two complementary
values of , such as 75° and 15°
as shown in the figure below. Of
course, the maximum height and
time of flight for one of these
values of are different from
the maximum height and time of
flight for the complementary
value.
Proof that the path of a
projectile is parabolic
If we start from the origin,
This gives
From , making t the
subject,
Substituting into
40

Equation of Trajectory (Path of
projectile)
Take the form
At any instant t
or
Also,
Substituting for t
From trigonometry,
or
……….1
This equation is of the form where 'a' and 'b are
constants. This is the equation
of a parabola. This equation of
motion is valid for launch
angles in the range .
Examples
1. A stone is thrown horizontally
at +15 m/s from the top of a
cliff that is 44 m high.
a) How long does the stone
take to reach the bottom
of the cliff?
b) How far from the base of
the cliff does the stone
strike the ground?
c) Sketch the trajectory of
the stone.
Solution
Known: Horizontal velocity, vx = +15 m/s
Initial height = 44 m
Initial vertical velocity, vy = 0 m/s
Vertical acceleration, g = -
9.8 m/s2
41
Unknowns: Time interval, t
Horizontal displacement,
x
If the initial height is 44 m,
then the vertical displacement
is y = -44 m
x = vx t and y = vy t + ½ gt2
a. y = vyo t + ½ gt2
with vyo = 0, y= ½ gt2
t2 = 2 y /g = 2 (-44 m)/ -9.8 m =
9.0 m/s2
hence t = 3.0 s
b. x = vx t
x = (+15 m/s) (3.0 s) = +45 m
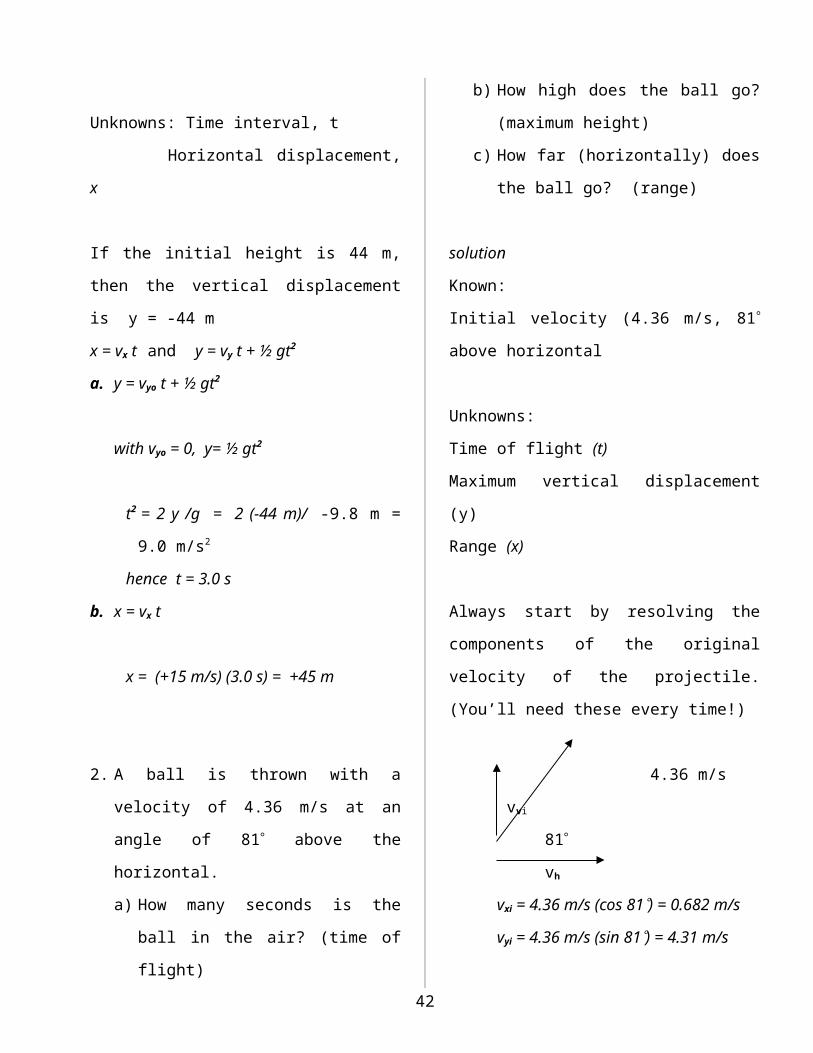
2. A ball is thrown with a
velocity of 4.36 m/s at an
angle of 81 above the
horizontal.
a) How many seconds is the
ball in the air? (time of
flight)
b) How high does the ball go?
(maximum height)
c) How far (horizontally) does
the ball go? (range)
solution
Known:
Initial velocity (4.36 m/s, 81
above horizontal
Unknowns:
Time of flight (t)
Maximum vertical displacement
(y)
Range (x)
Always start by resolving the
components of the original
velocity of the projectile.
(You’ll need these every time!)
4.36 m/s
vvi
81
vh
vxi = 4.36 m/s (cos 81) = 0.682 m/s
vyi = 4.36 m/s (sin 81) = 4.31 m/s
42
a. Calculate the time of flight.
Remember, the ball goes up,
then it comes down.
All we need to calculate is the
time for the ball to go up to
its maximum height and stop.
(The time it takes to come down
is the same!)
Let’s see… the ball starts out
going “up” at
vyi = 4.31 m/s.
It’s vyf = 0 m/s
It’s acceleration is always -9.8
m/s2.
Using g = (vyf – vyi)/t
we can solve for t by rearranging
the equation to
t = (vyf – vyi)/g or t = (0 – 4.31 )/g sec
Then t = 0.44 s
But… That’s only to go to the
maximum height. (Up only!)
For the entire trip:
2 (t) = 2 (.44 s) = 0.88 s
b. Calculate the maximum height
reached by the ball.
Let’s use an equation for
distance and acceleration.
Remember… this is just “up”. So
only use the 0.44 s for the “up”
trip.
y = vyi t + ½ gt2
y = vyi t + ½ gt2 = (4.31 m/s)
(0.44 s) + ½ (-9.8 m/s2) (0.44 s)2
y = + 0.95 m
d. Calculate the range (distance the ball
goes horizontally)
Since the ball has only constant
velocity horizontally, simply
use:
x = vx t
x = (0.682 m/s) (0.88 s)
x = 0.60 m
43
Why 0.88 s this time??? It’s
for the entire trip! Up and
Down!
Exercise
1. A cannon shoots a cannonball
horizontally off a cliff at
100m/s. The cannonball hits
the ground 150m away from the
base of the cliff. How high
was the cliff and with what
velocity did the cannonball
strike the ground?
2. A pelican flying along a
horizontal path drops a fish
from a height of 5.4m. The
fish travels 8 m horizontally
before it hits the water
below. What is the pelican’s
initial speed?
3. A rocket is launched at 100m/s
at an angle of 55˚ above the
ground. Find the total time
in the air, the rocket’s max
height and its range.
4. A ball is thrown with a speed
of 40m/s at an angle of 30°.
When the baseball is thrown
the fielder is 100m from the
plate. It is thrown from 1m
above the ground and caught
2.5m above the ground. With
what velocity should the
fielder have to run to make
the catch? At what distance
from the plate is the catch
made?
v = ?
5. A projectile is launched at an
angle of 30° and lands 60 m
away. What was its initial
speed?
6. A projectile is launched with
a speed of 40 m/s at an angle
44
of 60° from the top of a 30 m
cliff. Find the projectile’s
a. Max height
b. Total time in the air
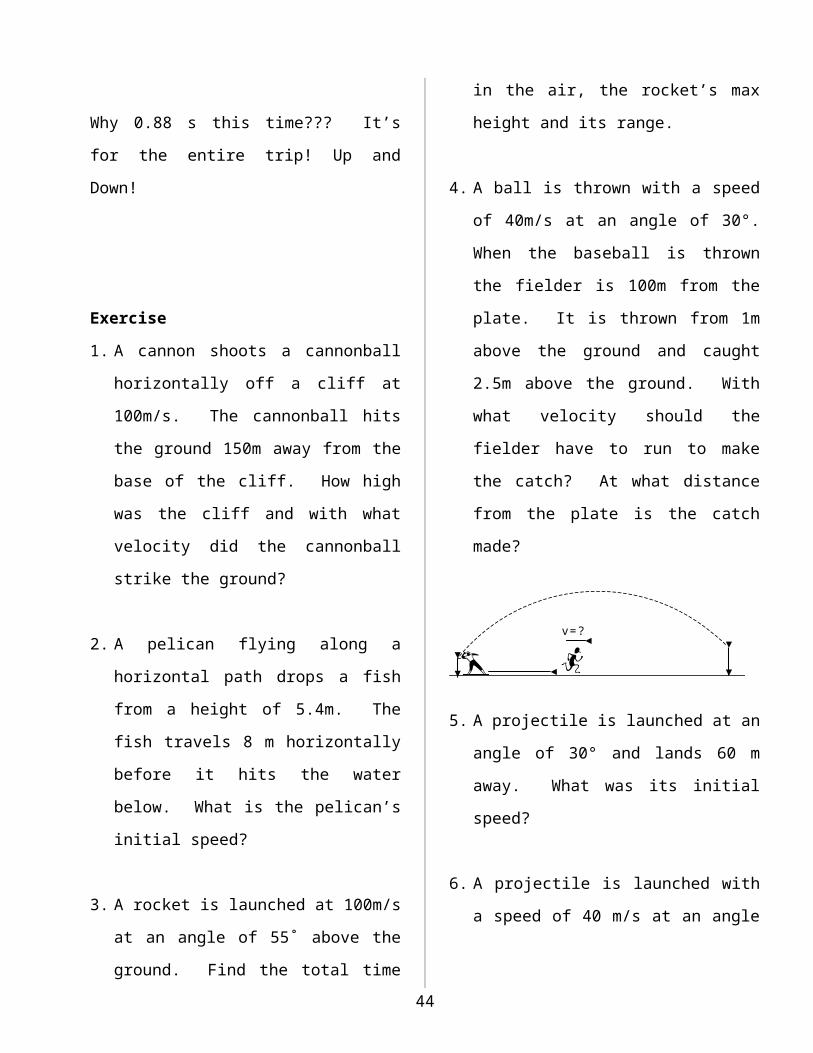
7. A ball is kicked towards a
fence from a point 32.0 m
away. The velocity of the
ball as it leaves the kicker’s
foot is 20.0 m/s at an angle
of 37.0 with the horizontal.
The top of the fence is 2.50
m. Air resistance is
negligible.
a) Find the time it takes for
the ball to reach the plane
of the fence.
b) Will the ball hit the
fence? If so, how far from
the top of the fence will
it hit? If not, how far
above the fence will it
pass?
8. The missile is launched at
150/s at an angle of 35˚ above
the horizon from 250 high.
a) Find the max height of the
missile.
b) Find the range if it is a
direct hit.
c) Find the velocity with
which it strikes the ship.
9. A missile is launched with a
velocity of 250m/s at an angle
of 45˚ above the ground.
a) Find d for direct hit
b) Show the missile clears the
cliff
c) Max height the missile
reaches
d) Find the projectile’s
velocity at 2sec
45
2 0 .0 m /s3 7 .0
3 2 .0 m
2 .5 0 m
Plane of fence
Related Documents


![Four Lectures on Wave Mechanics [ERWIN SCHRODINGER]](https://static.cupdf.com/doc/110x72/55cf9c7d550346d033aa0368/four-lectures-on-wave-mechanics-erwin-schrodinger.jpg)








