Submitted to the 3rd IEEE International Conference on Multimedia Computing and Systems (ICMCS’96). Spatio-Temporal Indexing for Large Multimedia Applications Yannis Theodoridis * , Michael Vazirgiannis, Timos Sellis Computer Science Division Department of Electrical and Computer Engineering National Technical University of Athens Zographou, Athens, 157 73 GREECE phone: +30-1-7721402 fax: +30-1-7722459 e-mail: {theodor, mvazirg, timos}@cs.ntua.gr * Author to whom correspondence should be addressed.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Submitted to the 3rd IEEE International Conference on
Multimedia Computing and Systems (ICMCS’96).
Spatio-Temporal Indexing for Large Multimedia Applications
Yannis Theodoridis∗∗ , Michael Vazirgiannis, Timos Sellis
Computer Science Division
Department of Electrical and Computer Engineering
National Technical University of Athens
Zographou, Athens, 157 73 GREECE
phone: +30-1-7721402
fax: +30-1-7722459
e-mail: {theodor, mvazirg, timos}@cs.ntua.gr
∗ Author to whom correspondence should be addressed.

1
Spatio-Temporal Indexing for Large Multimedia Applications
Yannis Theodoridis, Michael Vazirgiannis, Timos Sellis
Computer Science DivisionDepartment of Electrical and Computer Engineering
National Technical University of AthensZographou, Athens, 157 73 GREECE
e-mail: {theodor, mvazirg, timos}@cs.ntua.gr
ABSTRACT: Multimedia applications usually involve a large number ofmultimedia objects (texts, images, sounds etc.). Spatial and temporalrelationships among these objects should be efficiently supported and retrievedwithin a multimedia authoring tool. In this paper we present several spatial,temporal and spatio-temporal relationships of interest and propose efficientindexing schemes, based on multi-dimensional (spatial) data structures, for largemultimedia applications that involve thousands of objects. Evaluation models ofthe proposed schemes are also presented as well as hints for the selection of themost appropriate one, according to the multimedia author’s requirements.
1. INTRODUCTION
A Multimedia Application (MAP) involves a variety of individual multimedia objects
presented according to the MAP scenario. The multimedia objects that participate in
the MAP, called actors, are transformed either spatially or temporally in order to be
presented according to author's requirements. Moreover the author has to define the
spatial and temporal ordering of actors within the application context and define the
relationships among them. Finally the way that the user will interact with the
application as well as the way that the application will treat application or system
events have to be defined.
It is evident that authoring complex MAPs that involve a large number of actors may
be a very complicated task, keeping in mind the large set of possible events that may
encounter in the application context and the number of actors as well as the various
potential combinations of these parameters. Typically we would expect the number of
actors and their relationships in the context of an MAP to be 104 as regards order of
magnitude. Taking in account the vast number of possible events and their

2
combinations as regards interaction, the amount of the entities that have to be managed
by the MAP authors is considerable.
Thus the need for an indexing scheme that will support the author to manage the large
number of actors and spatio-temporal relationships among them is required. Current
authoring tools do not provide such facilities. Sample requirements would include:
• which actors appear in the application at a specific time instance,
• what is the spatial layout (screen layout) at a specific time instance during the
application,
• what is the temporal layout of the application in terms of temporal intervals,
• what is the spatio-temporal relationship among a set of actors in the application (i.e.
“does actor A spatially overlap with actor B in the application?” or “which actors
temporally overlap with actor A?”)
In this paper we propose indexing schemes for large multimedia applications in order
to assist authors manage the large number of actors, have spatial and temporal layouts
of parts or of the entire application, answer queries regarding spatio-temporal
relationships among actors. As regards multimedia application modelling we are based
on previous research efforts [Vazi93, Vazi95a], while we exploit a set of complete
spatio-temporal operators for the description of the spatial and/or temporal
relationships between the actors [Vazi95c].
The proposed indexing schemes are based on the R-tree index [Gutt84] which is
widely used for indexing of spatial data in several applications, such as Geographic
Information Systems (GIS), CAD and VLSI design, etc. We adapt R-trees in order to
index either spatial, temporal or spatio-temporal occurrences of actors and
relationships between them. Moreover, we evaluate the proposed schemes against the
case of serial storage of actors and their spatio-temporal coordinates, giving also hints
to multimedia database designers in order to select the most efficient scheme according
to the requirements of MAP authors.
In the literature there is no previous work, according to our knowledge, on indexing
spatio-temporal characteristics of actors1 . Research has mainly focused on content-
based image indexing, i.e., fast retrieval of objects using their content characteristics
(color, texture, shape). For example, in [Falo94a] a system, called QBIC, that couples
several features from machine vision with fast indexing methods from the database area
1 In the rest of the paper we will use the terms actor and object interchangeably.
3
is proposed in order to support colour, shape and texture matching queries. Nearest-
neighbour queries (based on image content) are addressed in [Chiu94]. In general,
indexing of actors’ contents is an active research area while indexing of actors’ extends
in the spatio-temporal coordinate system sets a new direction.
The paper is organised as follows: Section 2 presents the underlying model for MAPs
of interest and the spatio-temporal relationships and operators among actors of a MAP
that need efficient support. In Section 3 we propose two indexing schemes, a simple
and a unified one, based on the R-tree spatial index in order to support these operators.
The analytical evaluation of the proposed schemes is presented in Section 4. We
conclude in Section 5 summarising our work and giving hints for future research.
2. MULTIMEDIA APPLICATION MODELLING
Modelling of MAPs is a matter of current research [Duda95, Hirz95]. As a part of our
research we have specified object-oriented models for multimedia applications. More
specifically, we have specified models for compositions of multimedia objects in MAPs
[Vazi95c] and models for representation of MAP interactive scenarios based on
events [Vazi95a, Vazi95b].
The life-cycle of a MAP, as regards authoring, involves the following phases:
• High Level Specification: In this phase the author defines the high level scenario of
the application. More specifically the overall spatial layouts (screens) and high level
functionality of the application is designed, independent of specific media content.
• Media content selection and transformation: In this phase the author must select
the specific media contents for the actors. The media content should go through a
transformation phase, so as to align high level specifications (spatial and temporal
layouts) to MAP. For instance, assume an image originally sized 300x200 pixels
that has to be resized to 150x100 pixels for the sake of an application. These
transformations may be spatial and/or temporal and should not alter the original
data files.
• Specific scenario definition: In this phase the specific scenario for each actor must
be defined. The scenario belongs to one of the following two categories: pre-
orchestrated (pre-defined spatial and temporal ordering of actors) or interactive
(the application flow is affected by events related to user, application or the
system). In both cases the requirement for complete representation of the spatio-
temporal ordering and relationships among actors arises.
4
In the past, the term “synchronisation” has been widely used to describe the temporal
ordering of actors in a MAP. A MAP specification should describe both temporal and
spatial ordering of actors in the context of the MAP. The spatial ordering (i.e.,
absolute position and spatial relationships among actors) issues have not adequately
been addressed. We claim that the term synchronisation is poor for MAPs, instead we
propose the term “composition” to represent both the temporal and the spatial
composition of actors. As “composition” we define the spatio-temporal ordering of
actors in the context of the MAP. Composition has spatial and temporal features and
must represent the corresponding relationships among the actors [Vazi95c].
A model for scenarios should cover both pre-orchestrated and event-based cases. The
general form of a scenario tuple (scenario fundamental unit) [Vazi95a] should
represent: the triggering event (simple or complex), stopping event, set of actions to be
executed, constraints to be fulfilled for the scenario to start its execution. As regards
the interactive scenario cases the author should define the events (simple or complex)
that will be consumed by the application and will trigger actions to be executed. These
actions are essentially composed presentations of media objects. The events may be
related to user interaction, system or application events [Vazi95b].
In this paper we focus on the pre-orchestrated case, since event-based (or interactive)
scenario cases include non-deterministic temporal and/or spatial occurrences of actors.
Though this is a matter of our future research.
2.1. Spatio-Temporal Relationships and Operators
As we have mentioned above, a crucial parameter for MAP development is the
specification of the spatial and temporal presentation specifications as well as
relationships among the participating actors. We present here a set of operators to
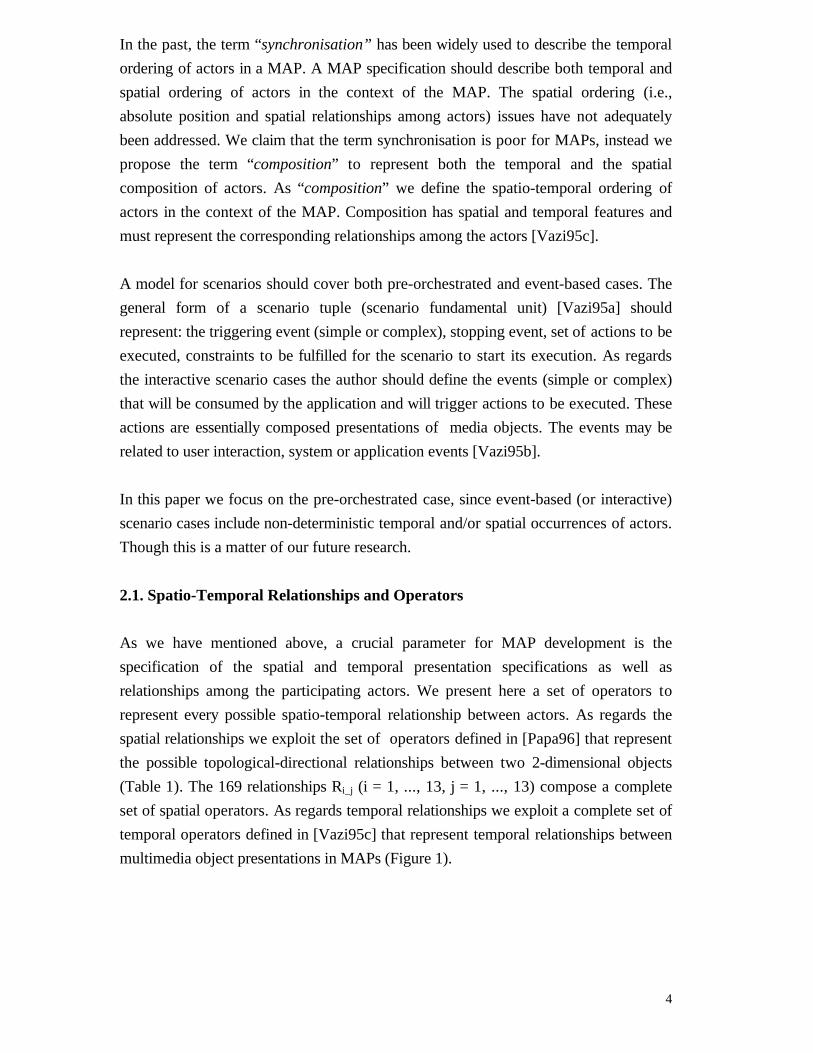
represent every possible spatio-temporal relationship between actors. As regards the
spatial relationships we exploit the set of operators defined in [Papa96] that represent
the possible topological-directional relationships between two 2-dimensional objects
(Table 1). The 169 relationships Ri_j (i = 1, ..., 13, j = 1, ..., 13) compose a complete
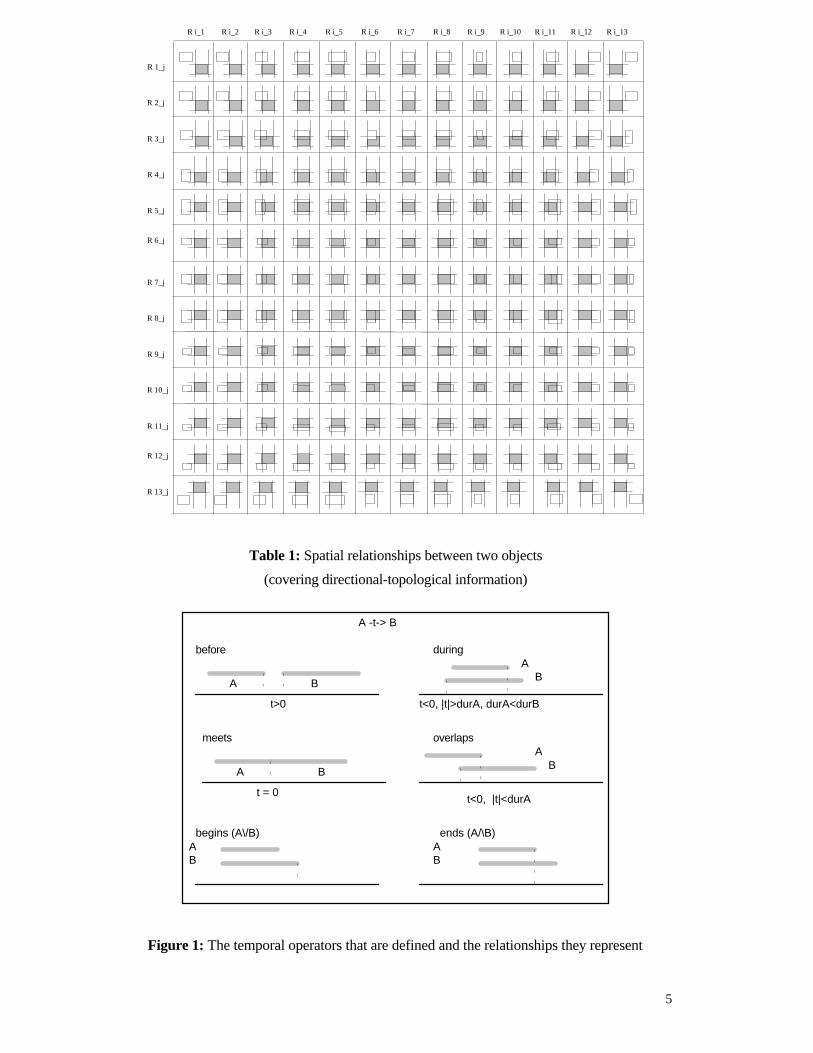
set of spatial operators. As regards temporal relationships we exploit a complete set of
temporal operators defined in [Vazi95c] that represent temporal relationships between
multimedia object presentations in MAPs (Figure 1).
5
R i_1 R i_2 R i_3 R i_4 R i_5 R i_6 R i_7 R i_8 R i_9 R i_10 R i_11 R i_12 R i_13
R 1_j
R 2_j
R 3_j
R 4_j
R 5_j
R 6_j
R 7_j
R 8_j
R 9_j
R 10_j
R 11_j
R 12_j
R 13_j
Table 1: Spatial relationships between two objects
(covering directional-topological information)
A -t-> B
t<0, |t|>durA, durA<durB
AB
t = 0
A B
t>0
A B
t<0, |t|<durA
AB
before during
meets overlaps
AB
begins (A\/B)AB
ends (A/\B)
Figure 1: The temporal operators that are defined and the relationships they represent

6
With this set of operators we can represent any spatio-temporal relationship among
actors. For instance, the following composition: “Image B to appear 3 seconds after
the image A, 4cm to the right and 5cm down the right bottom vertex of image A”
would be represented as the following composition tuple [Vazi95c]:
r1’ = A [(r 13_13 , v3, v2, 4, 5), ( -3->)] B
where r 13_13 is the corresponding spatial relationships (from Table 1), (-3->) is the
temporal relationship between the actors and v3, v2 are the named vertices of the
actors while (4,5) are their spatial distances on the two axes.
In the rest of the paper we are going to use the following spatial, temporal and spatio-
temporal relationships, as typical queries in order to illustrate the proposed indexing
schemes through these sample operators:
• spatial operators:
- overlap(p,q): returns the list of objects p that spatially overlap object q.
- above(p,q): returns the list of objects p that spatially lie above object q.
• temporal operators:
- during(p,q): returns the list of objects p that are temporally included in the
temporal interval that corresponds to the execution of object q.
- before(p,q): returns the list of objects p that are temporally executed before object
q.
• spatio-temporal operators:
- overlap_during(p,q): returns the list of objects p that spatially overlap object q
while its execution.
- overlap_before(p,q): returns the list of objects p that spatially overlap object q and
their execution ends before the beginning of execution of q.
- above_during(p,q): returns the list of objects p that spatially lie above object q
while its execution.
- above_before(p,q): returns the list of objects p that spatially lie above object q and
their execution ends before the beginning of execution of q.
We classify the above operators in two categories: inclusive (those that indicate spatial
or temporal overlapping or inclusion among actors) and exclusive (those that indicate
spatial or temporal disjointness among actors) ones. A general assumption is that
queries that involve inclusive operators are highly selective (i.e., the result is a limited
set of objects) while queries that involve exclusive operators indicate low selectivity
(i.e., the result is a large set of objects). We will also define in the next subsection a
7
sample MAP to use it as an example for illustration reasons as regards the indexing
schemes that will be proposed in Section 3.
2.2. An Example Multimedia Application
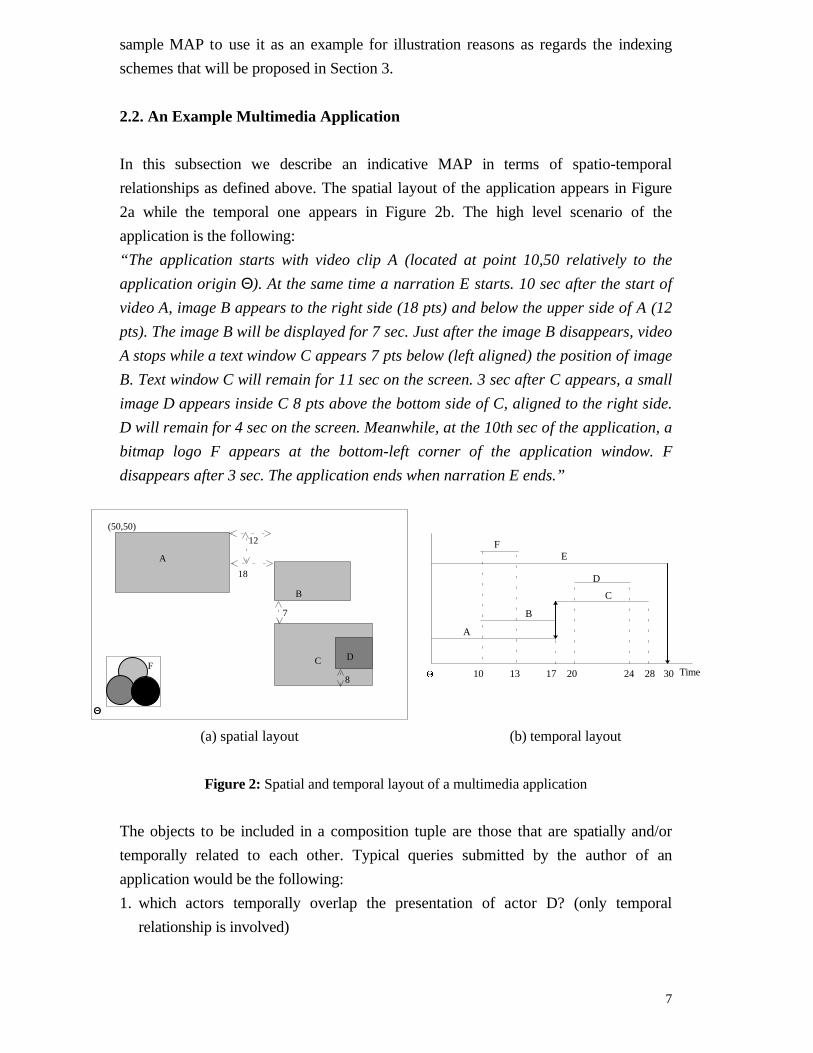
In this subsection we describe an indicative MAP in terms of spatio-temporal
relationships as defined above. The spatial layout of the application appears in Figure
2a while the temporal one appears in Figure 2b. The high level scenario of the
application is the following:
“The application starts with video clip A (located at point 10,50 relatively to the
application origin Θ). At the same time a narration E starts. 10 sec after the start of
video A, image B appears to the right side (18 pts) and below the upper side of A (12
pts). The image B will be displayed for 7 sec. Just after the image B disappears, video
A stops while a text window C appears 7 pts below (left aligned) the position of image
B. Text window C will remain for 11 sec on the screen. 3 sec after C appears, a small
image D appears inside C 8 pts above the bottom side of C, aligned to the right side.
D will remain for 4 sec on the screen. Meanwhile, at the 10th sec of the application, a
bitmap logo F appears at the bottom-left corner of the application window. F
disappears after 3 sec. The application ends when narration E ends.”
C D
B
7
8
18
12
A
ΘΘ
(50,50)
FTime
FE
D
A
10 13 17 20 24 28È
C
B
30
(a) spatial layout (b) temporal layout
Figure 2: Spatial and temporal layout of a multimedia application
The objects to be included in a composition tuple are those that are spatially and/or
temporally related to each other. Typical queries submitted by the author of an
application would be the following:
1. which actors temporally overlap the presentation of actor D? (only temporal
relationship is involved)
8
2. which actors spatially lie above actor D in the application window? (only spatial
relationship is involved)
3. which actors spatially overlap with actor D during its presentation? (spatio-temporal
relationship is involved)
4. what is the spatial layout of the screen on the 22nd sec of the application?
5. what is the temporal layout between the 10th and the 20th sec of the application?
In the next section we propose efficient indexing mechanism to support such queries in
a large multimedia application.
3. SPATIO - TEMPORAL INDEXING
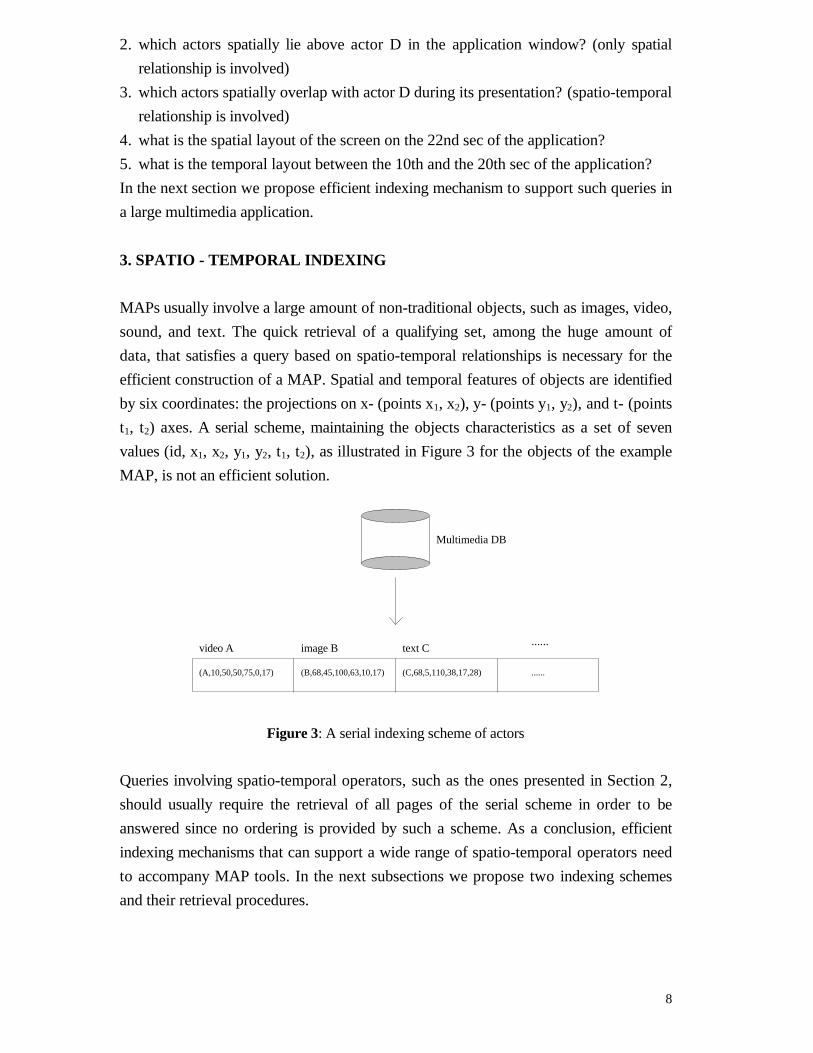
MAPs usually involve a large amount of non-traditional objects, such as images, video,
sound, and text. The quick retrieval of a qualifying set, among the huge amount of
data, that satisfies a query based on spatio-temporal relationships is necessary for the
efficient construction of a MAP. Spatial and temporal features of objects are identified
by six coordinates: the projections on x- (points x1, x2), y- (points y1, y2), and t- (points
t1, t2) axes. A serial scheme, maintaining the objects characteristics as a set of seven
values (id, x1, x2, y1, y2, t1, t2), as illustrated in Figure 3 for the objects of the example
MAP, is not an efficient solution.
Multimedia DB
(A,10,50,50,75,0,17) (B,68,45,100,63,10,17) (C,68,5,110,38,17,28) ......
video A image B text C......
Figure 3: A serial indexing scheme of actors
Queries involving spatio-temporal operators, such as the ones presented in Section 2,
should usually require the retrieval of all pages of the serial scheme in order to be
answered since no ordering is provided by such a scheme. As a conclusion, efficient
indexing mechanisms that can support a wide range of spatio-temporal operators need
to accompany MAP tools. In the next subsections we propose two indexing schemes
and their retrieval procedures.
9
3.1. A Simple Spatial and Temporal Indexing Scheme
A simple indexing scheme that could be able to handle spatial and temporal
characteristics of actors consists of two indexes:
• a spatial (two-dimensional) index for spatial characteristics (size and x- and y-
coordinates) of the objects and
• a temporal index for temporal characteristics (duration and start/stop time) of the
objects.
In the literature concerning the area of spatial databases, several data structures have
been proposed for the manipulation of spatial data (a survey can be found in
[Same89]). Among others, R-trees [Gutt84] and their variants [Sell87, Beck90] seem
to be the most efficient ones. On the other hand, the manipulation of temporal
information can be supported either by one-dimensional versions of the above data
structures (since all of them have been designed for n-dimensional space in general) or
by specialised temporal data structures, such as Segment Trees [Bent75] or Segment
R-trees [Kolo91].
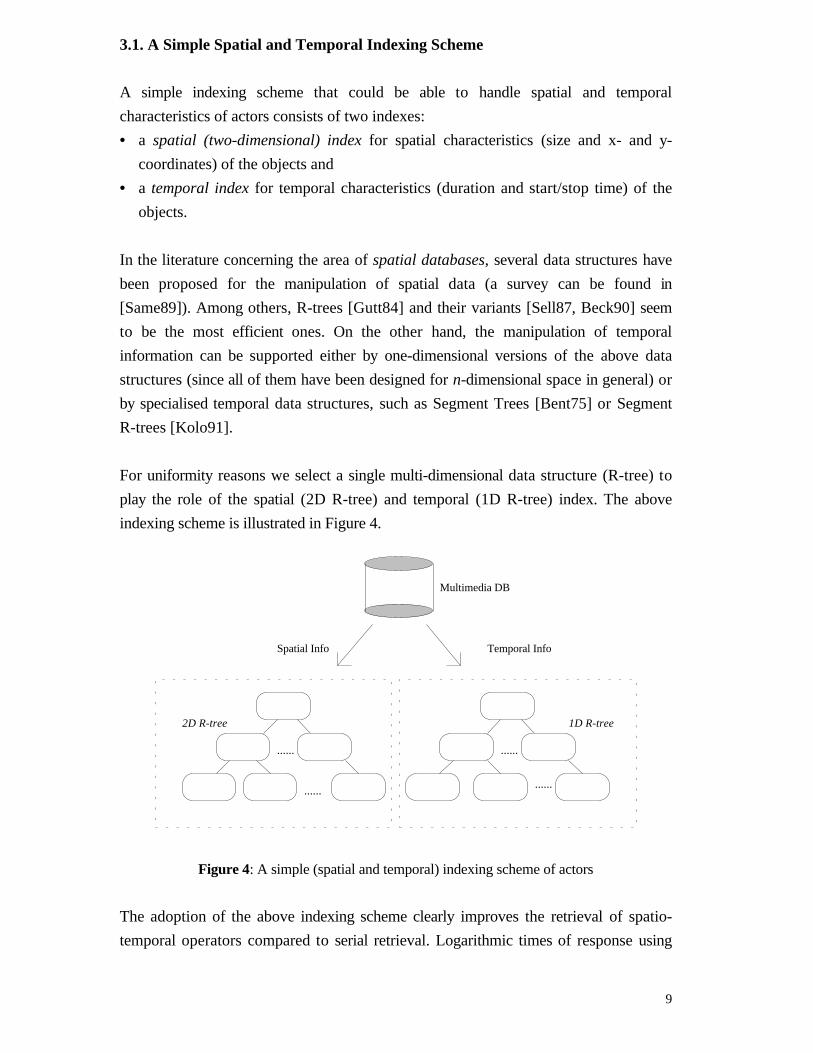
For uniformity reasons we select a single multi-dimensional data structure (R-tree) to
play the role of the spatial (2D R-tree) and temporal (1D R-tree) index. The above
indexing scheme is illustrated in Figure 4.
Multimedia DB
Spatial Info Temporal Info
2D R-tree 1D R-tree
......
............
......
Figure 4: A simple (spatial and temporal) indexing scheme of actors
The adoption of the above indexing scheme clearly improves the retrieval of spatio-
temporal operators compared to serial retrieval. Logarithmic times of response using
10
hierarchical tree indexes are always better than linear ones when no indexes are
present, especially when thousands or millions of objects are involved. Even for
complex operators where both indexes need to be accessed (e.g., for the
overlap_during operator) the cost of the two indexes’ response times is expected to be
lower than the cost of the serial retrieval.
A weak point of the above scheme has been already mentioned. The retrieval of objects
according to their spatio-temporal relationships (e.g., the overlap_during one) with
others, demands access to both indexes and, in a second phase, the computation of the
intersection set between the two answer sets. Access to both indexes is usually costly
and, in many cases, most of the elements of the two answer sets are not found in the
intersection set. In other words, most of the disk accesses to each index separately are
useless. To eliminate this problem, several techniques for spatial join, between two R-
trees for example, have been proposed [Brin93] and could be applied to our indexing
scheme. However, this solution is not applicable when two completely different
indexes are used (e.g. an R-tree for spatial information and a Segment Tree for
temporal information). A more efficient solution is the merging of the two indexes (the
spatial and the temporal one) in a unified mechanism. This scheme is proposed in the
next subsection.
3.2. A Unified Spatio-Temporal Indexing Scheme
In this subsection we propose a unified spatio-temporal indexing scheme that
eliminates the inefficiencies of the previous one and further improves the performance
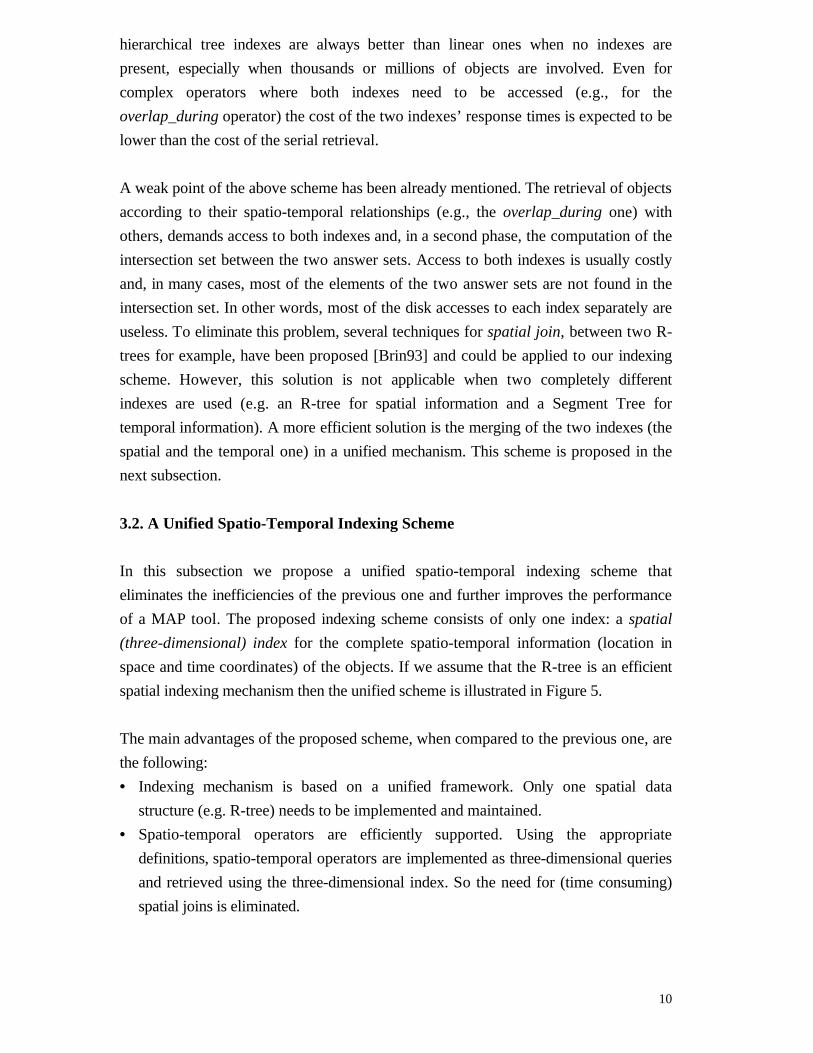
of a MAP tool. The proposed indexing scheme consists of only one index: a spatial
(three-dimensional) index for the complete spatio-temporal information (location in
space and time coordinates) of the objects. If we assume that the R-tree is an efficient
spatial indexing mechanism then the unified scheme is illustrated in Figure 5.
The main advantages of the proposed scheme, when compared to the previous one, are
the following:
• Indexing mechanism is based on a unified framework. Only one spatial data
structure (e.g. R-tree) needs to be implemented and maintained.
• Spatio-temporal operators are efficiently supported. Using the appropriate
definitions, spatio-temporal operators are implemented as three-dimensional queries
and retrieved using the three-dimensional index. So the need for (time consuming)
spatial joins is eliminated.
11
Multimedia DB
Spatio-Temporal Info
3D R-tree
......
......
Figure 5: A unified (spatio-temporal) indexing scheme of actors
The superiority of the second indexing scheme against the first one and, obviously, the
serial scheme on the retrieval of spatio-temporal operators will be formally proved in
Section 4 where analytical models that predict the performance of each scheme will be
presented. In the rest of the section we will present the retrieval process of such
operators when the unified indexing scheme is available within a multimedia
application tool.
3.3. Retrieval of Spatio-Temporal Operators Using R-trees
The majority of multi-dimensional data structures have been designed as extensions of
the classic alphanumeric index, B-trees. They usually divide the plane into appropriate
sub-regions and store these sub-regions in hierarchical tree structures. Multi-
dimensional objects are represented in the tree structure by an approximation instead
of their actual scheme, for simplicity and efficiency reasons2 .
When the MBRs of two objects are disjoint then we can conclude that the objects that
they represent are also disjoint. If the MBRs however share common points, no
conclusion can be drawn about the topological relation between the objects. For this
reason, spatial queries involve the following two-step strategy [Oren86]:
2 In this paper we examine spatial data structures based on the traditional approximation of Minimum
Bounding Rectangles (MBRs). MBRs are the most commonly used approximations in spatial data
structures because they need only 2n points - projections on the n axes - for the representation of a n-
dimensional object.

12
• Filter step: The tree structure is used to rapidly eliminate objects that could not
possibly satisfy the query. The result of this step is a set of candidates which
includes all the results and possibly some false hits.
• Refinement step: Each candidate is examined (by using computational geometry
techniques). False hits are detected and eliminated.
One of the most efficient hierarchical multi-dimensional data structures is called R-tree
[Gutt84]. It is a height-balanced tree, which consists of intermediate and leaf nodes.
The MBRs of the actual data objects are assumed to be stored in the leaf nodes of the
tree. Intermediate nodes are built by grouping rectangles (or hyper-rectangles, in
general) at the lower level. An intermediate node is associated with some rectangle
which encloses all rectangles that correspond to lower level nodes. In order to retrieve
objects that belong to the answer set of a spatio-temporal operator, with respect to a
reference object, we have to specify the MBRs that could enclose such objects and
then to search the intermediate nodes that contain these MBRs. This technique was
proposed and implemented in [Papa96] in order to support spatial operators of high
resolution (e.g. meet, contains) that are popular in GIS applications.
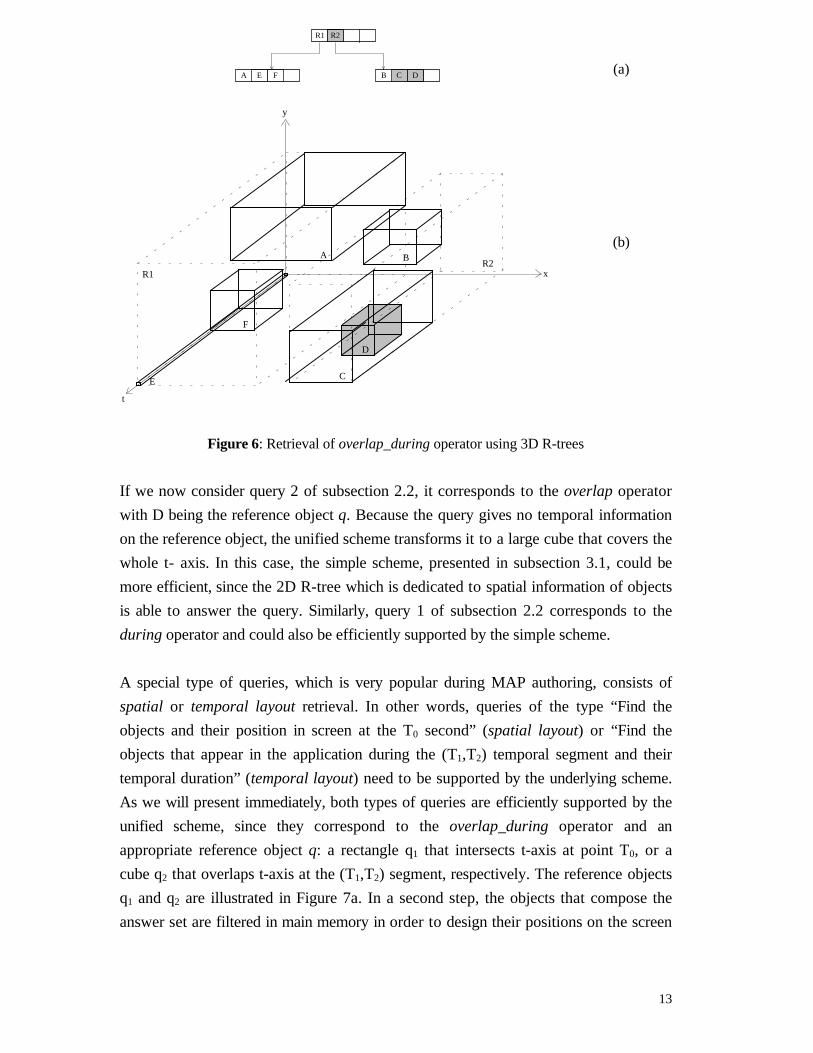
As an example, Figure 6 shows how the MBRs of Figure 2 are grouped and stored in
the 3D R-tree of our unified scheme. We assume a branching factor of 4, i.e., each
intermediate node contains at most four entries. At the lower level MBRs of objects
are grouped into two intermediate nodes R1 and R2, which in turn compose the root
of the index. If we consider query 3 of subsection 2.2, it corresponds to the
overlap_during operator with D being the reference object q. In order to answer this
query, only R2 is selected for propagation. Among the entries of R2, objects C and
(obviously) D are the ones that constitute the qualified answer set.
Note that only the right subtree of the R-tree index of Figure 6a was propagated in
order to answer the query. The rate of the accessed nodes heavily depends on the size
of the reference object q and, of course, the kind of the operator (more selective
operators result to smaller number of accessed nodes).
13
A E B
R1
F
R2
C D (a)
x
y
t
A B
C
D
F
E
R1R2
(b)
Figure 6: Retrieval of overlap_during operator using 3D R-trees
If we now consider query 2 of subsection 2.2, it corresponds to the overlap operator
with D being the reference object q. Because the query gives no temporal information
on the reference object, the unified scheme transforms it to a large cube that covers the
whole t- axis. In this case, the simple scheme, presented in subsection 3.1, could be
more efficient, since the 2D R-tree which is dedicated to spatial information of objects
is able to answer the query. Similarly, query 1 of subsection 2.2 corresponds to the
during operator and could also be efficiently supported by the simple scheme.
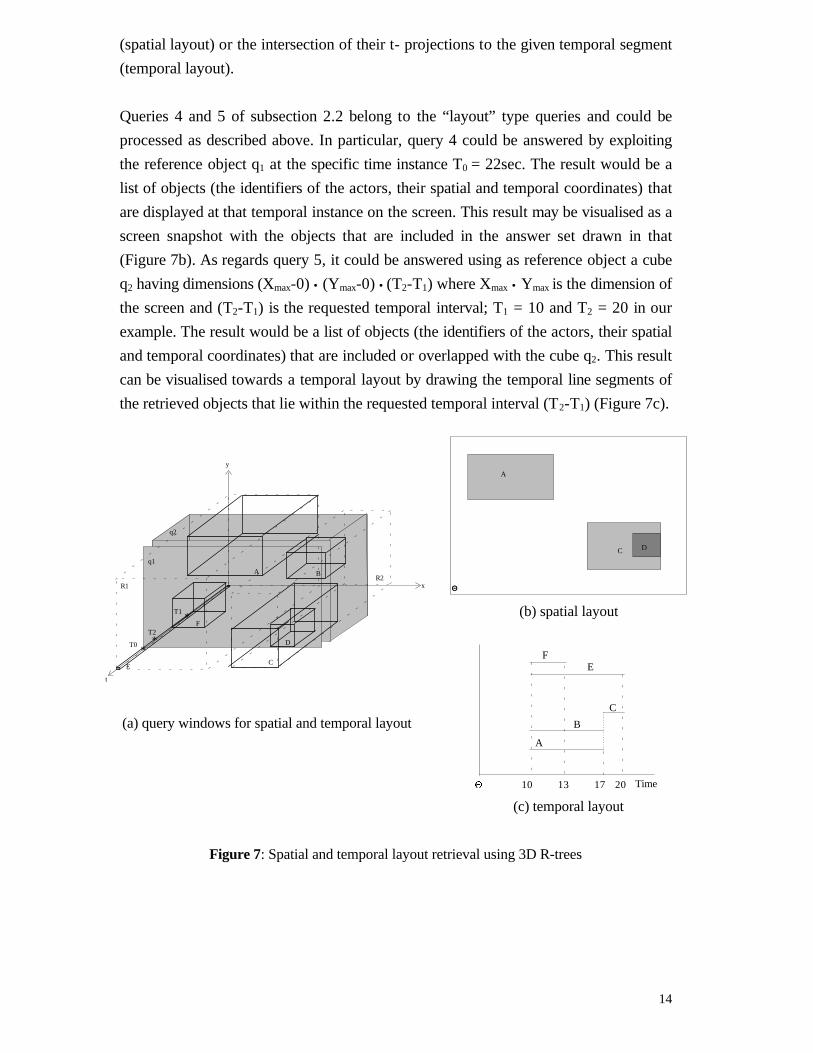
A special type of queries, which is very popular during MAP authoring, consists of
spatial or temporal layout retrieval. In other words, queries of the type “Find the
objects and their position in screen at the T0 second” (spatial layout) or “Find the
objects that appear in the application during the (T1,T2) temporal segment and their
temporal duration” (temporal layout) need to be supported by the underlying scheme.
As we will present immediately, both types of queries are efficiently supported by the
unified scheme, since they correspond to the overlap_during operator and an
appropriate reference object q: a rectangle q1 that intersects t-axis at point T0, or a
cube q2 that overlaps t-axis at the (T1,T2) segment, respectively. The reference objects
q1 and q2 are illustrated in Figure 7a. In a second step, the objects that compose the
answer set are filtered in main memory in order to design their positions on the screen
14
(spatial layout) or the intersection of their t- projections to the given temporal segment
(temporal layout).
Queries 4 and 5 of subsection 2.2 belong to the “layout” type queries and could be
processed as described above. In particular, query 4 could be answered by exploiting
the reference object q1 at the specific time instance T0 = 22sec. The result would be a
list of objects (the identifiers of the actors, their spatial and temporal coordinates) that
are displayed at that temporal instance on the screen. This result may be visualised as a
screen snapshot with the objects that are included in the answer set drawn in that
(Figure 7b). As regards query 5, it could be answered using as reference object a cube
q2 having dimensions (Xmax-0) • (Ymax-0) • (T2-T1) where Xmax • Ymax is the dimension of
the screen and (T2-T1) is the requested temporal interval; T1 = 10 and T2 = 20 in our
example. The result would be a list of objects (the identifiers of the actors, their spatial
and temporal coordinates) that are included or overlapped with the cube q2. This result
can be visualised towards a temporal layout by drawing the temporal line segments of
the retrieved objects that lie within the requested temporal interval (T2-T1) (Figure 7c).
x
y
t
A B
C
D
F
E
R1R2
T1
T2
q1
q2
T0
*
**
(a) query windows for spatial and temporal layout
C D
A
ΘΘ
(b) spatial layout
Time
FE
A
10 13 17 20È
C
B
(c) temporal layout
Figure 7: Spatial and temporal layout retrieval using 3D R-trees

15
On the other hand, the simple indexing scheme (consisting of two index structures) is
not able to give straightforward answers to the above layout queries, since information
stored in both indexes needs to be retrieved.
In this section we proposed two schemes for indexing of actors that appear in MAPs
and presented the retrieval procedure that concerns spatio-temporal operators on these
objects. In the next section both schemes will be analytically evaluated and compared
to each other. Their comparison will result to general conclusions on the advantages
and disadvantages of each solution.
4. ANALYTICAL EVALUATION OF THE INDEXING SCHEMES
We present an analytical model that estimates the performance of R-trees on the
retrieval of n-dimensional queries. The analytical formula is applicable to both indexing
schemes, if we keep in mind that the simple one consists of one 2D R-tree and one 1D
R-tree while the unified one consists of one 3D tree. Using this model we can estimate
the performance of both schemes and compare their efficiency using several spatio-
temporal operators.
4.1 Analysis of R-tree Performance
Most of the work in the literature has dealt with the expected performance of R-trees
for processing overlap queries i.e., the retrieval of data objects p that share common
area with a query window q [Page93, Falo94b, Theo95a]. More particularly, let N be
the total number of data objects indexed in a R-tree, D the density of the data objects
in the global space and f the average capacity of each R-tree node. If we assume that
the average size of a query window q is qii
n
=∏
1 then the expected retrieval cost (number
of disk accesses) of an overlap query using R-trees is [Theo95a]:
C qN
fD
f
Nqj j
j n
ii
n
j
N
ff
( )
log
= + ⋅ ⋅
+
==
+
∏∑1
1
11
1
(1)
where the average density of the R-tree nodes Dj at each level j is given by:
( )D
D
fj
j n
n
n
= +−
−
111
1
1 (2)
16
In other words, Dj can be computed recursively using D0 which denotes the density D
of the data MBRs. Qualitatively, this means that we can estimate the retrieval cost of
an overlap query based on the knowledge of the data set and the query window only.
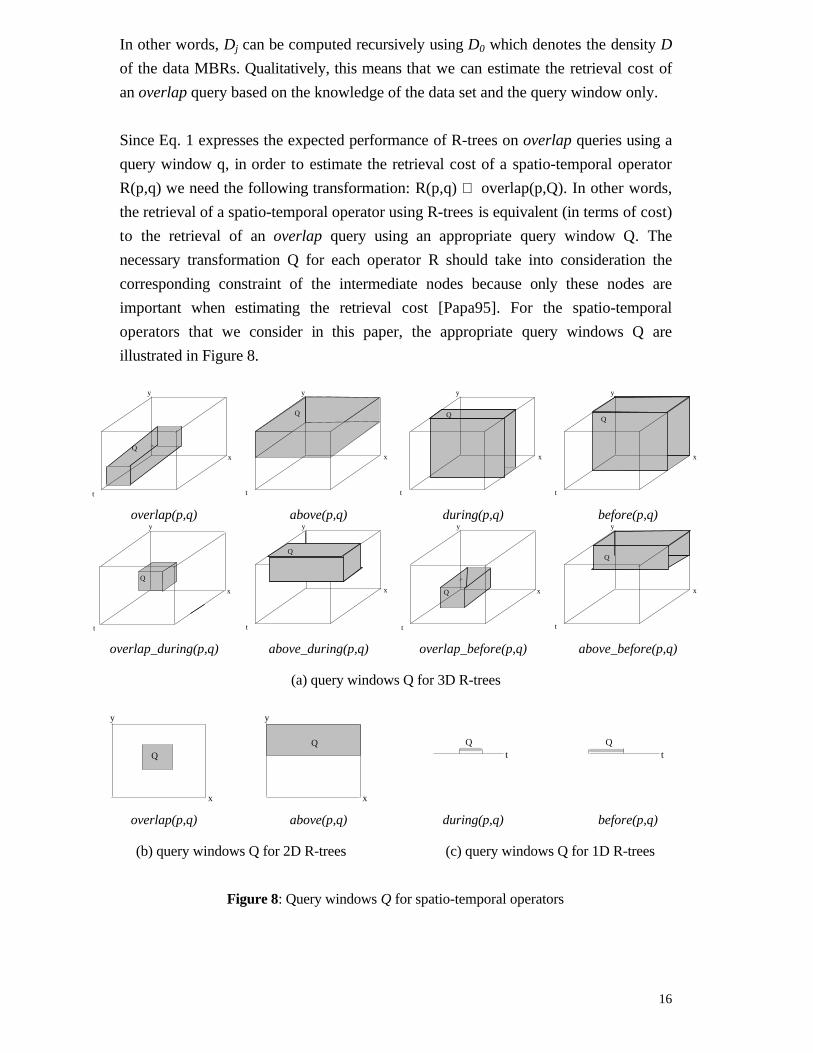
Since Eq. 1 expresses the expected performance of R-trees on overlap queries using a
query window q, in order to estimate the retrieval cost of a spatio-temporal operator
R(p,q) we need the following transformation: R(p,q) ⇒ overlap(p,Q). In other words,
the retrieval of a spatio-temporal operator using R-trees is equivalent (in terms of cost)
to the retrieval of an overlap query using an appropriate query window Q. The
necessary transformation Q for each operator R should take into consideration the
corresponding constraint of the intermediate nodes because only these nodes are
important when estimating the retrieval cost [Papa95]. For the spatio-temporal
operators that we consider in this paper, the appropriate query windows Q are
illustrated in Figure 8.
x
y
t
Qx
y
Q
t
x
y
Q
t
x
y
Q
t
overlap(p,q) above(p,q) during(p,q) before(p,q)
x
y
t
Q
x
y
t
Q
x
y
t
Q x
y
t
Q
overlap_during(p,q) above_during(p,q) overlap_before(p,q) above_before(p,q)
(a) query windows Q for 3D R-trees
x
y
Q
x
y
Qt
Qt
Q
overlap(p,q) above(p,q) during(p,q) before(p,q)
(b) query windows Q for 2D R-trees (c) query windows Q for 1D R-trees
Figure 8: Query windows Q for spatio-temporal operators
17
Figure 8a illustrates query windows Q (3D boxes) with respect to the eight operators
discussed, while Figures 8b and 8c illustrate query windows Q (2D rectangles and 1D
line segments, respectively) that correspond to spatial (overlap, above) and temporal
operators (during, before), respectively.
Using information from Figure 8 and Eq. 1 we can estimate the expected cost for the
query window Q, which equals to the expected cost C(R) for the retrieval of a spatio-
temporal operator R. The accuracy of the above analytical model has been already
evaluated on spatial relationships of varying selectivity (e.g., inside, near, northeast,
and combinations) in [Theo95b]. Intuitively, we assume that the unified scheme should
be the most efficient one when both spatial and temporal information are included in
the query while in the rest cases the simple scheme seems to be preferable. The
accuracy of these intuitive conclusions will be examined in the next subsection where
the above analytical model will be used to the analytical comparison of the proposed
schemes.
4.2 Analytical Comparison
In order to compare the efficiency of each scheme on the retrieval of spatio-temporal
operators we assumed a multimedia application including 10,000 actors of the
following distribution:
• a portion of 75% characterised by small projections on the three axes (x-, y-, t-) e.g.
text or video that cover a small space on the screen and last a short time interval,
• a portion of 15% characterised by zero projection on the two axes (x-, y-) and small
projection on the third axis (t-) e.g. sounds that cover zero space on the screen and
last a short time interval,
• a portion of 5% characterised by small projections on the two axes (x-, y-) and large
projection on the third axis (t-) e.g. heading titles or logos that cover a small space
on the screen and last a long time interval,
• a portion of 5% characterised by large projections on the two axes (x-, y-) and small
projection on the third axis (t-) e.g. full text or background patterns that cover a
large space on the screen and last a short time interval, and
The above distribution characterises, in general terms, a typical MAP and will be used
as the sample for the comparison of the two indexing schemes. Different distributions
of actors are also supported in a similar way by adapting their density D.
18
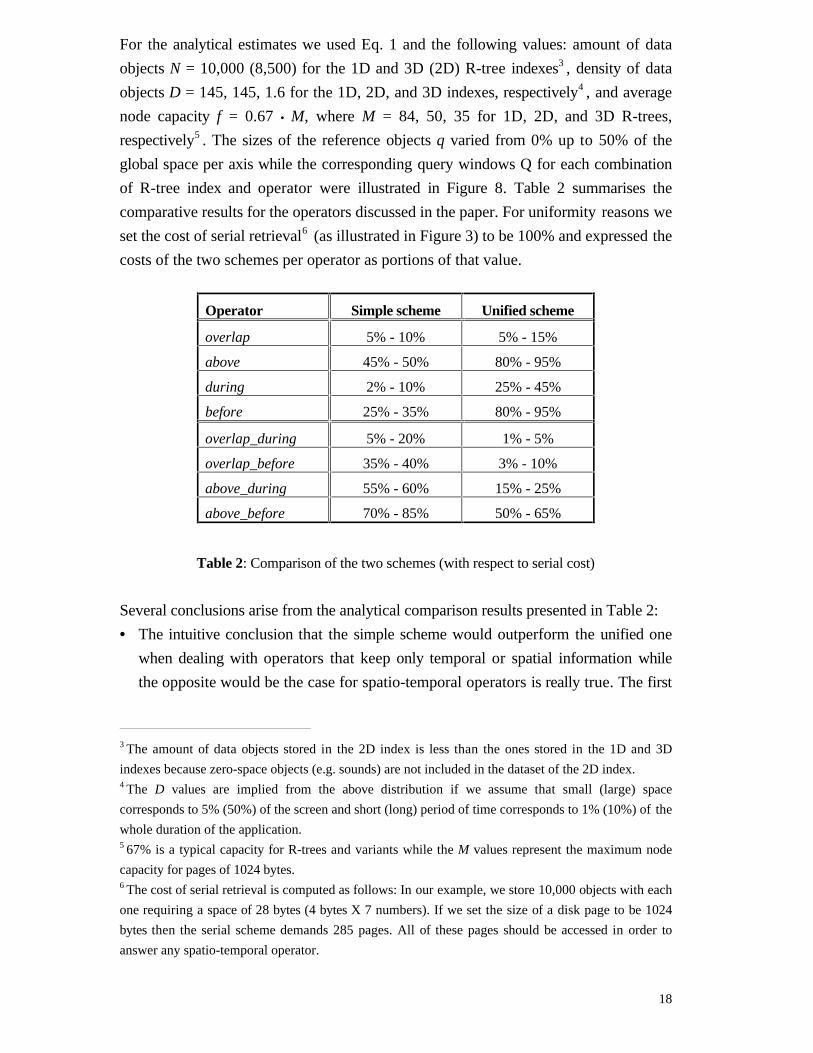
For the analytical estimates we used Eq. 1 and the following values: amount of data
objects N = 10,000 (8,500) for the 1D and 3D (2D) R-tree indexes3 , density of data
objects D = 145, 145, 1.6 for the 1D, 2D, and 3D indexes, respectively4 , and average
node capacity f = 0.67 • M, where M = 84, 50, 35 for 1D, 2D, and 3D R-trees,
respectively5 . The sizes of the reference objects q varied from 0% up to 50% of the
global space per axis while the corresponding query windows Q for each combination
of R-tree index and operator were illustrated in Figure 8. Table 2 summarises the
comparative results for the operators discussed in the paper. For uniformity reasons we
set the cost of serial retrieval6 (as illustrated in Figure 3) to be 100% and expressed the
costs of the two schemes per operator as portions of that value.
Operator Simple scheme Unified scheme
overlap 5% - 10% 5% - 15%
above 45% - 50% 80% - 95%
during 2% - 10% 25% - 45%
before 25% - 35% 80% - 95%
overlap_during 5% - 20% 1% - 5%
overlap_before 35% - 40% 3% - 10%
above_during 55% - 60% 15% - 25%
above_before 70% - 85% 50% - 65%
Table 2: Comparison of the two schemes (with respect to serial cost)
Several conclusions arise from the analytical comparison results presented in Table 2:
• The intuitive conclusion that the simple scheme would outperform the unified one
when dealing with operators that keep only temporal or spatial information while
the opposite would be the case for spatio-temporal operators is really true. The first
3 The amount of data objects stored in the 2D index is less than the ones stored in the 1D and 3D
indexes because zero-space objects (e.g. sounds) are not included in the dataset of the 2D index.4 The D values are implied from the above distribution if we assume that small (large) space
corresponds to 5% (50%) of the screen and short (long) period of time corresponds to 1% (10%) of the
whole duration of the application.5 67% is a typical capacity for R-trees and variants while the M values represent the maximum node
capacity for pages of 1024 bytes.6 The cost of serial retrieval is computed as follows: In our example, we store 10,000 objects with each
one requiring a space of 28 bytes (4 bytes X 7 numbers). If we set the size of a disk page to be 1024
bytes then the serial scheme demands 285 pages. All of these pages should be accessed in order to
answer any spatio-temporal operator.
19
four operators are more efficiently supported by the simple scheme while the cost of
the unified scheme is usually two or three times higher. The reverse situation
appears for the last four operators.
• Both schemes are much more efficient than the serial retrieval scheme. For the most
selective operators (overlap, during, overlap_during) the improvement is at a level
of one or even two orders of magnitude, compared to the serial cost. For the least
selective operators (above, before, above_before) the cost of the most efficient
scheme is a 1/4 up to 1/2 portion of the serial cost.
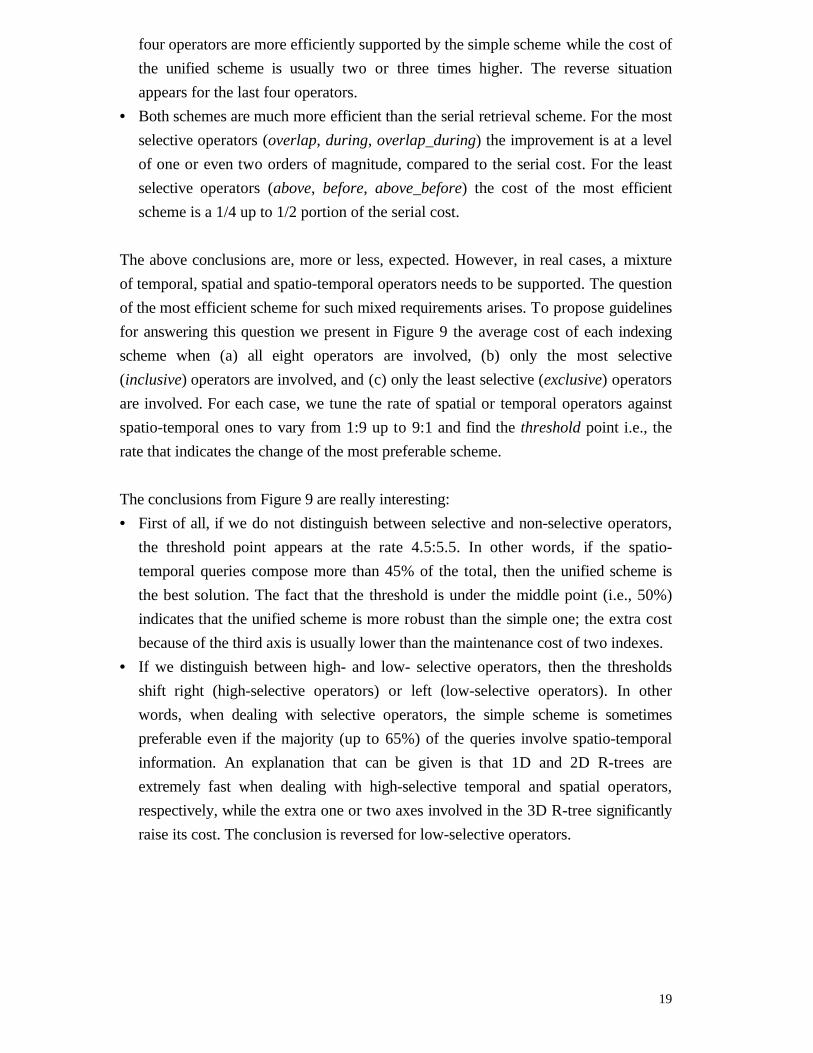
The above conclusions are, more or less, expected. However, in real cases, a mixture
of temporal, spatial and spatio-temporal operators needs to be supported. The question
of the most efficient scheme for such mixed requirements arises. To propose guidelines
for answering this question we present in Figure 9 the average cost of each indexing
scheme when (a) all eight operators are involved, (b) only the most selective
(inclusive) operators are involved, and (c) only the least selective (exclusive) operators
are involved. For each case, we tune the rate of spatial or temporal operators against
spatio-temporal ones to vary from 1:9 up to 9:1 and find the threshold point i.e., the
rate that indicates the change of the most preferable scheme.
The conclusions from Figure 9 are really interesting:
• First of all, if we do not distinguish between selective and non-selective operators,
the threshold point appears at the rate 4.5:5.5. In other words, if the spatio-
temporal queries compose more than 45% of the total, then the unified scheme is
the best solution. The fact that the threshold is under the middle point (i.e., 50%)
indicates that the unified scheme is more robust than the simple one; the extra cost
because of the third axis is usually lower than the maintenance cost of two indexes.
• If we distinguish between high- and low- selective operators, then the thresholds
shift right (high-selective operators) or left (low-selective operators). In other
words, when dealing with selective operators, the simple scheme is sometimes
preferable even if the majority (up to 65%) of the queries involve spatio-temporal
information. An explanation that can be given is that 1D and 2D R-trees are
extremely fast when dealing with high-selective temporal and spatial operators,
respectively, while the extra one or two axes involved in the 3D R-tree significantly
raise its cost. The conclusion is reversed for low-selective operators.
20
(a)
all operators involved
1:9 2:8 3:7 4:6 5:5 6:4 7:3 8:2 9:1
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
0
20
40
60
simple
AAAAAAAAunified
(b)
only the most selective
(inclusive) operators
involved
1:9 2:8 3:7 4:6 5:5 6:4 7:3 8:2 9:1
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAAAA
0
10
20
30
simple
AAAAAAAAAAAAunified
(c)
only the least selective
(exclusive) operators
involved
1:9 2:8 3:7 4:6 5:5 6:4 7:3 8:2 9:1
AAAAAAAA
AAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAA
0
50
100
simple
AAAAAAAAunified
Figure 9: Retrieval cost of the two indexing schemes (% of the serial cost)
The above conclusions make a clear evaluation of the two proposed indexing schemes
when various parameters (type of operators, rate of spatial and temporal operators
against spatio-temporal ones, selectivity of operators) are involved. It is a choice of the
multimedia database designer to select the most preferable solution, with respect to the
requirements of the MAP author.
5. CONCLUSION
In this paper we proposed a mechanism for management of actors in large multimedia
applications. This mechanism is based on indexing spatial and temporal presentation
features of the actors during the application. The two indexing schemes proposed are
based on the R-tree structure; the first scheme includes one 1D and one 2D R-tree that

21
index temporal and spatial characteristics of actors, respectively, while the second
scheme includes one 3D R-tree that indexes the spatio-temporal characteristics of
actors, considering time to be the third axis of the coordinate system. We evaluated the
two schemes against the “serial” scheme and presented guidelines that help one to
select the most appropriate solution.
Authoring complex MAPs that involve a large number of actors is a complicated task,
keeping in mind the large set of possible events that may encounter in the application
context and the number of actors as well as the various potential combinations of these
parameters. Thus the need for a scheme that will support the author to manage the
large number of actors and spatio-temporal relationships among them is required.
Current authoring tools do not provide such facilities. The mechanism we proposed
provides an actor management scheme to authors who can query, before application
execution, the application scenario for spatio-temporal relationships among actors (i.e.,
“does actor A spatially overlap with actor B in the application?” or “which actors
temporally overlap with actor A?”). Moreover, authors may request spatio-temporal
layouts of the application at specific spatial and/or temporal instances (i.e., “which
actors appear in the application at a specific time instance”, or “what is the spatial
layout (screen layout) at a specific time instance during the application”, or “what is
the temporal layout of the application in terms of temporal intervals”).
A limitation of our approach is that it does not support interactive scenarios due to the
non-deterministic spatial and temporal occurrences of the actors. However, the
proposed scheme could be further extended towards:
• indexing of interactive scenarios: the indexing scheme should be extended so as to
cover the case of interactive scenarios, where the spatio-temporal presence of an
actor depends on the occurrence of events.
• playout management based on the indexing scheme: the model we proposed could
be as well used during the execution phase of the scenario. In this case the
appropriate media would be quickly located on the basis of the scenario.
REFERENCES
[Beck90] N. Beckmann, H.-P. Kriegel, R. Schneider, B. Seeger, “The R*-tree: An
Efficient and Robust Access Method for Points and Rectangles”,
Proceedings of ACM SIGMOD International Conference on Management
of Data, 1990.
22
[Bent75] J.L. Bentley, “Multidimensional Binary Search Trees Used for Associative
Searching”, Communications of the ACM, vol. 18, pp. 509-517, 1975.
[Brin93] T. Brinkhoff, H.-P. Kriegel, B. Seeger, “Efficient Processing of Spatial
Joins using R-trees”, Proceedings of ACM SIGMOD International
Conference on Management of Data, 1993.
[Chiu94] T. Chiueh, “Content-Based Image Indexing”, Proceedings of the 20th
International Conference on Very Large Databases (VLDB), 1994.
[Duda95] A. Duda, C. Keramane, “Structured Temporal Composition of Multimedia
Data”, Proceedings of the 1st IEEE International Workshop for MM-
DBMSs, 1995.
[Falo94a] C. Faloutsos, W. Equitz, M. Flickner, W. Niblack, D. Petkovic, R. Barber,
“Efficient and Effective Querying by Image Content”, Journal of Intelligent
Information Systems, vol. 3, pp. 1-28, 1994.
[Falo94b] C. Faloutsos, I. Kamel, “Beyond Uniformity and Independence: Analysis of
R-trees Using the Concept of Fractal Dimension”, Proceedings of the 13th
ACM Symposium on Principles of Database Systems (PODS), 1994.
[Gutt84] A. Guttman, “R-trees: A Dynamic Index Structure for Spatial Searching”,
Proceedings of ACM SIGMOD International Conference on Management
of Data, 1984.
[Hirz95] N. Hirzalla, B. Falchuck, A. Karmouch, “A Temporal Model for
Interactive Multimedia Scenarios”, IEEE Multimedia Magazine, Fall 1995.
[Kolo91] C.P. Kolovson, M. Stonebraker, “Segment Indexes: Dynamic Indexing
Techniques for Multi-Dimensional Interval Data”, Proceedings of ACM
SIGMOD International Conference on Management of Data, 1991.
[Oren86] J. Orenstein, “Spatial Query Processing in an Object-Oriented Database
System”, Proceedings of ACM SIGMOD International Conference on
Management of Data, 1986.
[Page93] B.-U. Pagel, H.-W. Six, H. Toben, P. Widmayer, “Towards an Analysis of
Range Query Performance”, Proceedings of the 12th ACM Symposium on
Principles of Database Systems (PODS), 1993.
[Papa95] D. Papadias, Y. Theodoridis, T. Sellis, M. Egenhofer, “Topological
Relations in the World of Minimum Bounding Rectangles: a Study with R-
trees”, Proceedings of ACM SIGMOD International Conference on
Management of Data, 1995.
[Papa96] D. Papadias, Y. Theodoridis, “Spatial Relations, Minimum Bounding
Rectangles, and Spatial Data Structures”, International Journal of
Geographic Information Systems (to appear), 1996.
23
[Same89] H. Samet, “The Design and Analysis of Spatial Data Structures”, Addison-
Wesley, 1989.
[Sell87] T. Sellis, N. Roussopoulos, C. Faloutsos, “The R+-tree: A Dynamic Index
for Multidimensional Objects”, Proceedings of the 13th International
Conference on Very Large Databases (VLDB), 1987.
[Theo95a] Y. Theodoridis, T. Sellis, “On the Performance Analysis of Multi-
dimensional R-tree-based Data Structures”, Technical Report KDBSLAB-
TR-95-03, Knowledge and Database Systems Laboratory, National
Technical University of Athens, Greece, 1995.
[Theo95b] Y. Theodoridis, D. Papadias, “Range Queries Involving Spatial Relations:
A Performance Analysis”, Proceedings of the 2nd International Conference
on Spatial Information Theory (COSIT), 1995.
[Vazi93] M. Vazirgiannis, C. Mourlas, “An Object Oriented Model for Interactive
Multimedia Applications”, The Computer Journal, British Computer
Society, vol. 36(1), 1/1993.
[Vazi95a] M. Vazirgiannis, M. Hatzopoulos, “Integrated Multimedia Object and
Application Modeling Based on Events and Scenarios”, Proceedings of the
1st IEEE International Workshop for MM-DBMSs, 1995.
[Vazi95b] M. Vazirgiannis, T. Sellis, “Event and Action Representation and
Composition for Multimedia Application Scenario Modeling”, Technical
Report KDBSLAB-TR-95-08, Knowledge and Database Systems
Laboratory, National Technical University of Athens, 1995.
[Vazi95c] M. Vazirgiannis, Y. Theodoridis, T. Sellis, “Spatio-Temporal Composition
in Multimedia Applications”, Technical Report KDBSLAB-TR-95-09,
Knowledge and Database Systems Laboratory, National Technical
University of Athens, 1995.
Related Documents











