Vol. 41, No. 4, November 2007, pp. 470–483 issn 0041-1655 eissn 1526-5447 07 4104 0470 inf orms ® doi 10.1287/trsc.1060.0187 © 2007 INFORMS Solving the Capacitated Location-Routing Problem by a Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic Christian Prins, Caroline Prodhon Institute Charles Delaunay, FRE CNRS 2848, Université de Technologie de Troyes, BP 2060, 10010 Troyes Cedex, France {[email protected], [email protected]} Angel Ruiz Département opérations et systèmes de dècision, Faculté des sciences de l’administration, Université Laval, Québec, Canada G1K 7P4, [email protected] Patrick Soriano Méthodes quantitatives de gestion, École des hautes études commercioles (HEC-Montréal), 3000 chemin de la Côte-Sainte-Catherine, Montréal, Canada H3T 2A7, Centre interuniversitaire de recherche sur les réseaux d’entreprise la logistique et le transport (CIRRELT), [email protected] Roberto Wolfler Calvo Institute Charles Delaunay, FRE CNRS 2848, Université de Technologie de Troyes, BP 2060, 10010 Troyes Cedex, France, roberto.wolfl[email protected] M ost of the time in a distribution system, depot location and vehicle routing are interdependent, and recent studies have shown that the overall system cost may be excessive if routing decisions are ignored when locating depots. The location-routing problem (LRP) overcomes this drawback by simultaneously tackling loca- tion and routing decisions. This paper presents a cooperative metaheuristic to solve the LRP with capacitated routes and depots. The principle is to alternate between a depot location phase and a routing phase, exchanging information on the most promising edges. In the first phase, the routes and their customers are aggregated into supercustomers, leading to a facility-location problem, which is then solved by a Lagrangean relaxation of the assignment constraints. In the second phase, the routes from the resulting multidepot vehicle-routing problem (VRP) are improved using a granular tabu search (GTS) heuristic. At the end of each global iteration, informa- tion about the edges most often used is recorded to be used in the following phases. The method is evaluated on three sets of randomly generated instances and compared with other heuristics and a lower bound. Solutions are obtained in a reasonable amount of time for such a strategic problem and show that this metaheuristic outperforms other methods on various kinds of instances. Key words : location-routing problem; Lagrangean relaxation; granular tabu search History : Received: November 2005; revision received: June 2006; accepted: November 2006. Introduction Logistics costs often represent a large portion of com- pany expenses. To reduce them, depot location and vehicle routing are crucial choices. Most of the time, these two levels of decision are tackled separately, but, unfortunately, it has been shown that this strat- egy often leads to suboptimal solutions (Salhi and Rand 1989). The location-routing problem (LRP) inte- grates these two decision levels. As shown in Min, Jayaraman, and Srivastava (1998), most of the early published papers consider either capacitated routes or capacitated depots (Laporte, Norbert, and Taille- fer 1988; Chien 1993; Srivastava 1993), but not both. In general, the LRP is formulated as a determinis- tic node-routing problem (i.e., customers are located on nodes of the network). However, a few authors have studied stochastic cases (Laporte, Louveaux, and Mercure 1989; Chan, Carter, and Burnes 2001) and, more recently, arc routing versions (Ghiani and Laporte 2001; Labadi 2003). Albareda-Sambola, Díaz, and Fernández (2005) pro- pose a two-phase tabu search (TS) heuristic for the LRP with one single route per capacitated open depot. The algorithm consists of an intensification phase that optimizes the routes and a diversification phase that modifies the set of open depots. The method is tested on small instances only (at most 30 customers). Tuzun and Burke (1999) develop another two-phase TS, but for the LRP with capacitated routes and uncapacitated depots, that is, a depot may have as many routes as desired. The two phases are also dedicated to routing and location. The principle is to increase progressively the number of open depots until this deteriorates the 470

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Vol. 41, No. 4, November 2007, pp. 470–483issn 0041-1655 �eissn 1526-5447 �07 �4104 �0470
informs ®
doi 10.1287/trsc.1060.0187©2007 INFORMS
Solving the Capacitated Location-RoutingProblem by a Cooperative Lagrangean
Relaxation-Granular Tabu Search HeuristicChristian Prins, Caroline Prodhon
Institute Charles Delaunay, FRE CNRS 2848, Université de Technologie de Troyes, BP 2060,10010 Troyes Cedex, France {[email protected], [email protected]}
Angel RuizDépartement opérations et systèmes de dècision, Faculté des sciences de l’administration,
Université Laval, Québec, Canada G1K 7P4, [email protected]
Patrick SorianoMéthodes quantitatives de gestion, École des hautes études commercioles (HEC-Montréal),
3000 chemin de la Côte-Sainte-Catherine, Montréal, Canada H3T 2A7, Centre interuniversitairede recherche sur les réseaux d’entreprise la logistique et le transport (CIRRELT), [email protected]
Roberto Wolfler CalvoInstitute Charles Delaunay, FRE CNRS 2848, Université de Technologie de Troyes, BP 2060,
10010 Troyes Cedex, France, [email protected]
Most of the time in a distribution system, depot location and vehicle routing are interdependent, and recentstudies have shown that the overall system cost may be excessive if routing decisions are ignored when
locating depots. The location-routing problem (LRP) overcomes this drawback by simultaneously tackling loca-tion and routing decisions. This paper presents a cooperative metaheuristic to solve the LRP with capacitatedroutes and depots. The principle is to alternate between a depot location phase and a routing phase, exchanginginformation on the most promising edges. In the first phase, the routes and their customers are aggregated intosupercustomers, leading to a facility-location problem, which is then solved by a Lagrangean relaxation of theassignment constraints. In the second phase, the routes from the resulting multidepot vehicle-routing problem(VRP) are improved using a granular tabu search (GTS) heuristic. At the end of each global iteration, informa-tion about the edges most often used is recorded to be used in the following phases. The method is evaluatedon three sets of randomly generated instances and compared with other heuristics and a lower bound. Solutionsare obtained in a reasonable amount of time for such a strategic problem and show that this metaheuristicoutperforms other methods on various kinds of instances.
Key words : location-routing problem; Lagrangean relaxation; granular tabu searchHistory : Received: November 2005; revision received: June 2006; accepted: November 2006.
IntroductionLogistics costs often represent a large portion of com-pany expenses. To reduce them, depot location andvehicle routing are crucial choices. Most of the time,these two levels of decision are tackled separately,but, unfortunately, it has been shown that this strat-egy often leads to suboptimal solutions (Salhi andRand 1989). The location-routing problem (LRP) inte-grates these two decision levels. As shown in Min,Jayaraman, and Srivastava (1998), most of the earlypublished papers consider either capacitated routesor capacitated depots (Laporte, Norbert, and Taille-fer 1988; Chien 1993; Srivastava 1993), but not both.In general, the LRP is formulated as a determinis-tic node-routing problem (i.e., customers are locatedon nodes of the network). However, a few authorshave studied stochastic cases (Laporte, Louveaux,
and Mercure 1989; Chan, Carter, and Burnes 2001)and, more recently, arc routing versions (Ghiani andLaporte 2001; Labadi 2003).Albareda-Sambola, Díaz, and Fernández (2005) pro-
pose a two-phase tabu search (TS) heuristic for theLRP with one single route per capacitated open depot.The algorithm consists of an intensification phase thatoptimizes the routes and a diversification phase thatmodifies the set of open depots. The method is testedon small instances only (at most 30 customers). Tuzunand Burke (1999) develop another two-phase TS, butfor the LRP with capacitated routes and uncapacitateddepots, that is, a depot may have as many routes asdesired. The two phases are also dedicated to routingand location. The principle is to increase progressivelythe number of open depots until this deteriorates the
470

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 471
total cost. These authors report results for up to 200customers.Hereafter, the case with capacities on both depots
and routes will be referred to as the general LRP.Wu, Low, and Bai (2002) study the general LRPwith homogeneous or limited heterogeneous fleets.They divide the original problem into two subprob-lems: a location-allocation problem, where each routeis viewed as one single node whose demand isequal to the amount delivered by this route, anda vehicle-routing problem (VRP). Each subproblemis solved in a sequential and iterative manner bya simulated annealing algorithm with a tabu list toavoid cycling. They test their method on small- andmedium-size instances (from 12 to 85 customers, butmainly instances with 50 nodes). Prins, Prodhon, andWolfler Calvo (2005, 2006) also study the general LRP,but with a homogeneous and unlimited fleet. Theypropose a greedy randomized adaptive search proce-dure (GRASP) with a memory of the depots used dur-ing a diversification phase. This information guidesthe search of the most promising depots during anintensification phase. The method then ends with apostoptimization performed by a path-relinking algo-rithm. Results are given for up to 200 customers.A heuristic for a three-level general LRP includ-
ing factories, depots, and customers and a maxi-mum duration per route are developed by Brunsand Klose (1996). They propose an iterative “loca-tion first-route second” heuristic in which cost coef-ficients for serving customers from a depot are usedin the location phase and reestimated after each rout-ing phase. Hence, the location subproblem is solvedindependently using a Lagrangean heuristic based onthe relaxation of the capacity constraints. From theobtained assignment of customers, a tour constructionprocedure is executed and followed by an iterativetour improvement heuristic. The overall procedureiterates until the estimate of the cost coefficients is sta-bilized or a maximum number of iterations is reached.The heuristic is evaluated on instances having up to10 plants, 50 potential depots, and 100 customers.Barreto (2004b) develops a family of three-phaseheuristics based on clustering techniques. Clusters ofcustomers fitting vehicle capacity are formed in thefirst phase. A traveling salesman problem (TSP) issolved for each cluster in the second phase. Finally,in the third phase, the depots to be opened are deter-mined by solving a facility-location problem, in whichthe TSP cycles are aggregated into supernodes. Bar-reto also proposes a lower bound, which is reachedby the best heuristics on some small-scale instances(up to 36 customers and 5 depots).The present paper deals with the general LRP with
fixed costs whenever a depot or a route is opened.The objective is to determine the set of depots to
open and the routes originating from each of them tominimize a total cost comprised of the setup costs ofdepots and routes and the total variable cost of theroutes. Given that the problem is NP-hard, the useof an exact approach is inconceivable for the targetedlarge-scale instances. Therefore, the proposed methodis an approximate algorithm. It alternates between afacility-location phase, solved by a Lagrangean relax-ation approach, and a routing phase, handled by agranular tabu search (GTS). This basis scheme worksin synergy with a natural exchange of information.Nevertheless, some diversification is needed to escapefrom local optima. New solutions are built in a guidedprocedure using more and more information concern-ing the most promising edges while the algorithmmoves on. This further cooperation can be seen as abranching zero adding the most promising edges inthe solution. Moreover, to the best of our knowledge,this is the first time that a relaxation on the assign-ment constraints and a GTS are applied to LRP withina cooperative approach.The paper is organized as follows. Section 1 defines
the problem, introduces some required notation, andproposes an integer linear programming model. Thedepot-location phase solved by a Lagrangean relax-ation is then presented in §2, followed by a descriptionof the GTS in §3. Section 4 explains the cooperativestep linking these two basic components. To evaluatethe performance of the method, computational exper-iments are presented in §5. Some concluding remarksclose the paper.
1. Problem Definition andMathematical Model
The LRP studied in this paper is defined on acomplete, weighted, and undirected network G =�V �E�C�. V is a set of nodes comprised of a subset Iof m possible depot locations and a subset J = V \Iof n customers. The traveling cost between any twonodes i and j is given by cij . A capacity Wi and anopening cost Oi are associated with each depot sitei ∈ I . Each customer j ∈ J has a demand dj . A set Kof identical vehicles of capacity Q is available. Whenused, each vehicle incurs a fixed cost F and performsa single route. The total number of vehicles used (orroutes performed) is a decision variable.The following constraints must hold:• each demand dj must be served by one single
vehicle;• each route must begin and end at the same
depot, and its total load must not exceed vehiclecapacity;• the total load of the routes assigned to a depot
must fit the capacity of that depot.

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic472 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
The total cost of a route includes the fixed cost Fand the costs of traversed edges (variable costs). Theobjective is to find which depots should be openedand which routes should be constructed to minimizethe total cost (fixed costs of depots plus total vari-able cost of the routes). Euclidean instances like thoseconsidered in §5 correspond to a complete directedgraph G in which cij is the Euclidean distance betweennodes i and j .The problem can be modelled as a zero-one linear
program. The following Boolean variables are used:yi = 1 iff depot i is opened, fij = 1 iff customer j isassigned to depot i, and xjlk = 1 iff edge �j� l� is tra-versed from j to l in the route performed by vehiclek ∈K.
min z=∑i∈I
Oiyi +∑i∈V
∑j∈V
∑k∈K
cijxijk +∑k∈K
∑i∈I
∑j∈J
Fxijk� (1)
subject to∑k∈K
∑i∈V
xijk = 1 ∀ j ∈ J (2)
∑j∈J
∑i∈V
djxijk ≤Q ∀k ∈K (3)
∑j∈V
xijk −∑j∈V
xjik = 0 ∀k ∈K� ∀ i ∈ V (4)
∑i∈I
∑j∈J
xijk ≤ 1 ∀k ∈K (5)
∑i∈S
∑j∈S
xijk ≤ �S� − 1 ∀S ⊆ J � ∀k ∈K (6)
∑u∈J
xiuk+∑
u∈V \�j�
xujk ≤1+fij ∀ i∈ I�∀ j ∈ J �∀k∈K (7)
∑j∈J
djfij ≤Wiyi ∀ i ∈ I (8)
xijk ∈ �0�1� ∀ i ∈ V � ∀ j ∈ V � ∀k ∈K (9)
yi ∈ �0�1� ∀ i ∈ I (10)
fij ∈ �0�1� ∀ i ∈ I� ∀ j ∈ V (11)
The objective function (1) sums all the costs de-scribed before. Constraints (2) guarantee that everycustomer belongs to one and only one route and thateach customer has only one predecessor in the tour.Capacity constraints are satisfied through inequali-ties (3) and (8). Constraints (4) and (5) ensure thecontinuity of each route and a return to the depotof origin. Constraints (6) are subtour elimination con-straints. Constraints (7) specify that a customer canbe assigned to a depot only if a route linking them isopened. Finally, constraints (9), (10), and (11) state theBoolean nature of the decision variables.The LRP is obviously NP-hard because it reduces
to the well-known VRP when m = 1. It is muchmore combinatorial than the VRP because, in addition
to the partition of customers into routes and thesequencing of each route, it involves the selection ofopen depots and the assignment of routes to thesedepots. Therefore, only very small instances can besolved exactly by commercial linear programming(LP) solvers, and basic relaxations such as the linearrelaxation provide very weak lower bounds. A firstnontrivial bound for the LRP with capacitated routesand depots has been proposed only recently (Barreto2004b). Its quality has been proven on small instances,but the author reports no gap beyond 50 customersbecause it becomes too time consuming.Due to the size of the instances targeted in this
paper (up to 20 depot sites and 200 customers), anew metaheuristic is proposed. Searching a neigh-borhood that simultaneously allows opening or clos-ing depots, as well as moving customers, may bevery difficult and time consuming to handle. Thisis why we propose a solution procedure in whicheach global iteration performs one location phase (di-versification) and one routing phase (intensification).Therefore, the method alternates between these twophases, described, respectively, in §§2 and 3, andan exchange of information between these two com-ponents is applied to create a powerful cooperativeapproach, which is detailed in §4.
2. Location Phase Based onLagrangean Relaxation
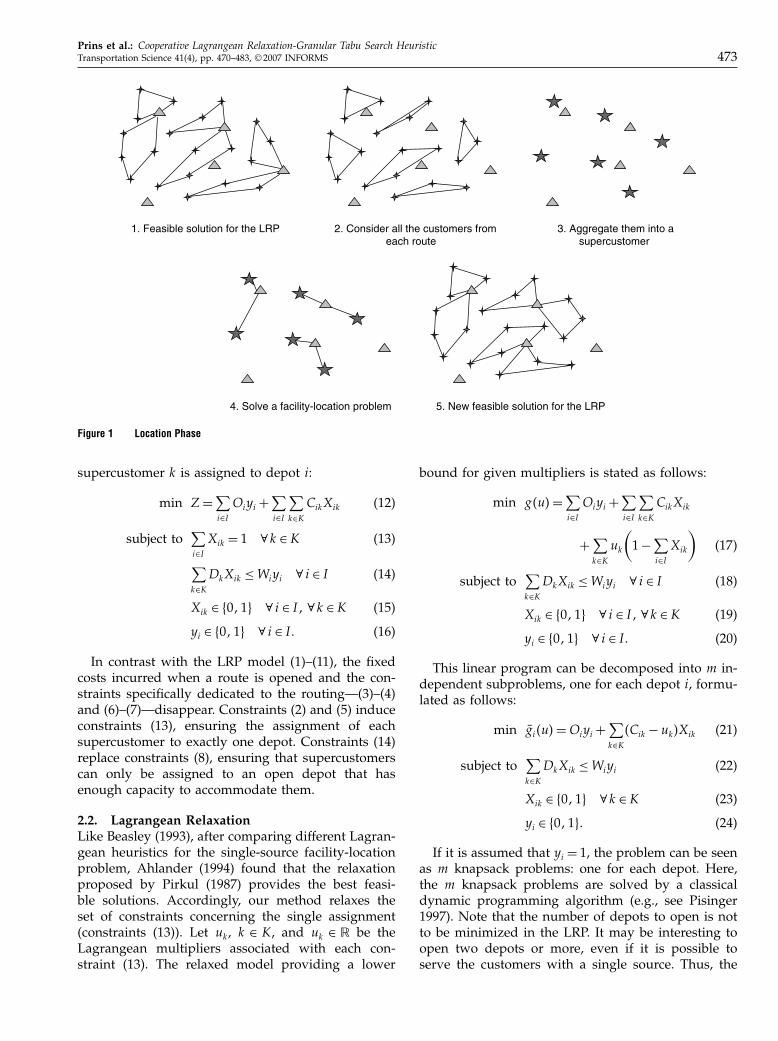
The location phase begins from a feasible solution,obtained either by a constructive heuristic (at the firstglobal iteration of the proposed algorithm) or result-ing from the previous routing phase (in the subse-quent iterations). From this solution, the customersfrom each route k and their demand are aggregatedinto one supercustomer k of demand Dk (Figure 1gives an example of aggregation of customers). Its dis-tance Cik to a depot i is computed as the minimuminsertion cost of this depot between two consecutivecustomers j and l of the original route as follows:
Cik = cij + cil − cjl
2.1. Facility-Location ProblemThe aggregation of routes into supercustomers resultsin a single-source capacitated facility-location prob-lem, where each supercustomer can only be servedfrom a single capacitated depot. Given a set ofm potential locations for source facilities (depots) anda set of supercustomers, the objective is to minimizethe total cost to open depots and assign the super-customers to them while respecting depot capacityconstraints. The problem can be modelled as follows,where the binary decision variables Xik equal one iff
Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 473
1. Feasible solution for the LRP 2. Consider all the customers fromeach route
3. Aggregate them into asupercustomer
4. Solve a facility-location problem 5. New feasible solution for the LRP
Figure 1 Location Phase
supercustomer k is assigned to depot i:
min Z =∑i∈I
Oiyi +∑i∈I
∑k∈K
CikXik (12)
subject to∑i∈I
Xik = 1 ∀k ∈K (13)
∑k∈K
DkXik ≤Wiyi ∀ i ∈ I (14)
Xik ∈ �0�1� ∀ i ∈ I� ∀k ∈K (15)
yi ∈ �0�1� ∀ i ∈ I (16)
In contrast with the LRP model (1)–(11), the fixedcosts incurred when a route is opened and the con-straints specifically dedicated to the routing—(3)–(4)and (6)–(7)—disappear. Constraints (2) and (5) induceconstraints (13), ensuring the assignment of eachsupercustomer to exactly one depot. Constraints (14)replace constraints (8), ensuring that supercustomerscan only be assigned to an open depot that hasenough capacity to accommodate them.
2.2. Lagrangean RelaxationLike Beasley (1993), after comparing different Lagran-gean heuristics for the single-source facility-locationproblem, Ahlander (1994) found that the relaxationproposed by Pirkul (1987) provides the best feasi-ble solutions. Accordingly, our method relaxes theset of constraints concerning the single assignment(constraints (13)). Let uk, k ∈ K, and uk ∈ � be theLagrangean multipliers associated with each con-straint (13). The relaxed model providing a lower
bound for given multipliers is stated as follows:
min g�u�=∑i∈I
Oiyi +∑i∈I
∑k∈K
CikXik
+∑k∈K
uk
(1−∑
i∈I
Xik
)(17)
subject to∑k∈K
DkXik ≤Wiyi ∀ i ∈ I (18)
Xik ∈ �0�1� ∀ i ∈ I� ∀k ∈K (19)
yi ∈ �0�1� ∀ i ∈ I (20)
This linear program can be decomposed into m in-dependent subproblems, one for each depot i, formu-lated as follows:
min gi�u�=Oiyi +∑k∈K
�Cik −uk�Xik (21)
subject to∑k∈K
DkXik ≤Wiyi (22)
Xik ∈ �0�1� ∀k ∈K (23)
yi ∈ �0�1� (24)
If it is assumed that yi = 1, the problem can be seenas m knapsack problems: one for each depot. Here,the m knapsack problems are solved by a classicaldynamic programming algorithm (e.g., see Pisinger1997). Note that the number of depots to open is notto be minimized in the LRP. It may be interesting toopen two depots or more, even if it is possible toserve the customers with a single source. Thus, the

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic474 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
approach can be adapted to solve instances wheredepots are uncapacitated by imposing a fictitiouscapacity equal to half the total demand of the super-customers when solving the knapsack problems.For given values of uk, the optimal solution (�yi and�Xik) of (17)–(20), which constitutes a lower bound for
(12)–(16), can be deduced from the optimal solutionsof the m knapsack problems by considering the val-ues gi, which can be seen as the reduced cost for eachdepot i. If it is negative, then depot i is open (�yi = 1)and the values of the �Xik, ∀k ∈ K are the ones foundby solving the knapsack problem for depot i (Xik).Otherwise, the depot i is closed, and the associated �yi
and �Xik, ∀k ∈K are obviously set to zero.
2.3. Subgradient OptimizationThe solution obtained with �yi and �Xik only yields alower bound to the original location problem becauseit may assign supercustomers to several depots,which is forbidden by the original constraints. To im-prove this lower bound, the Lagrangean multipliersare adjusted by a subgradient optimization in whichthe depots that are closest to the supercustomers arefavored at the beginning by initializing uk values to
uk =mini
�Cik� ∀k ∈K (25)
Each iteration of the subgradient optimization startsby solving (17)–(20) with the current values of uk,using the method described in §2.2. The resultingsolution is optimal for the original location problemif each supercustomer is assigned to a single depot,which means that it is feasible. Otherwise, we havea lower bound (lb). An upper bound (ub) can bededuced from lb by using the following repair proce-dure to deal with supercustomers that are split or leftunassigned. The knapsack problems deal with capac-ity constraints, and attention should mainly be paidto unassigned supercustomers. The repair procedureis inspired by the Lagrangean heuristic in Cortinhaland Captivo (2003). Let PDk be the set of depots towhich a supercustomer k is assigned. The first consid-ered supercustomers are the ones assigned to a singledepot (�PDk� = 1). Their assignment is already deter-mined and provides an initial subset of open depots(SOD). Then supercustomers with �PDk� > 1 are con-sidered. For such a supercustomer k, depots fromSOD∩PDk are considered and the nearest one chosen.The residual capacity of that depot is adjusted accord-ingly. If none is found, supercustomer k is assignedto the depot in PDk\�SOD ∩ PDk� with the largestnumber of supercustomers assigned to it in the solu-tion of (17)–(20). This depot is added to SOD. Finally,because of the capacity constraints, the unassignedsupercustomers (�PDk� = 0) are handled one by one indecreasing order of their demand. They are assigned
to their nearest depot from SOD with enough capac-ity. If none can serve the considered supercustomer,then the closed depot that has enough capacity toaccommodate it, and for which the total cost of open-ing plus assignment of the supercustomer is minimal,is opened and added to SOD.With the lower and upper bounds obtained, the
Lagrangean multipliers can be updated using Equa-tion (26). The step length t�q� at iteration q of thesubgradient optimization is given by (27). �ub is the best-known upper bound. (�q� is initially set to 1.5, halvedevery three consecutive iterations without improve-ment, and reset to its initial value when it becomessmaller than some predetermined ) or when �ub isimproved. d�q� is an m-vector in which d
�q�
k is definedby (28).
u�q�
k = u�q−1�k + t�q�d
�q�
k (26)
t�q� = (�q��ub − lb�d�q�� (27)
d�q�
k = 1−∑i∈I
X lbik ∀k ∈K (28)
The subgradient optimization continues until con-vergence occurs (lb= �ub or �d�q�� = 0) as the depots toopen as well as the assignment of the supercustomersare directly provided, or a predetermined number ofiterations LagrIt is reached, in which case the final fea-sible solution of the location problem is provided bythe best upper bound found (�ub).
2.4. From the Facility-Location Problem Solutionto the LRP Solution
The solution of the LRP is extracted from the solu-tion of the facility-location problem by disaggregat-ing supercustomers into routes and customers. In fact,the routes available at the beginning of the locationphase are kept, but the depots are removed. The newopen depots are inserted between two consecutivecustomers in each route assigned to them, to mini-mize the insertion cost of these depots. The principleof the location phase is illustrated in Figure 1.
3. Routing Phase with a GranularTabu Search
The routing phase, based on the GTS defined below, isintended as an intensification phase that optimizes theroutes without changing the set of open depots pro-vided by the last location phase, hence resulting in amultidepot VRP. However, all the customers assignedto one depot may be progressively moved to otherdepots and, ultimately, empty depots may be closed.Tabu search (Glover and Laguna 1997) is a local
search metaheuristic that performs the best availablemove in a given neighborhood even if it does not
Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 475
improve the current solution, enabling the search toescape from local optima. A tabu mechanism (e.g., alist of recent moves) is used to avoid loops result-ing from coming back to already visited solutions.The idea of granularity was introduced by Toth andVigo (2003). The list of possible moves in the neigh-borhood is restricted, removing elements that have noreal chance of belonging to the optimal solution. Thiscan be seen as an intensification mechanism. BecauseGTS searches a smaller neighborhood, it is faster thanthe original TS.Unlike the GTS proposed by Toth and Vigo (2003),
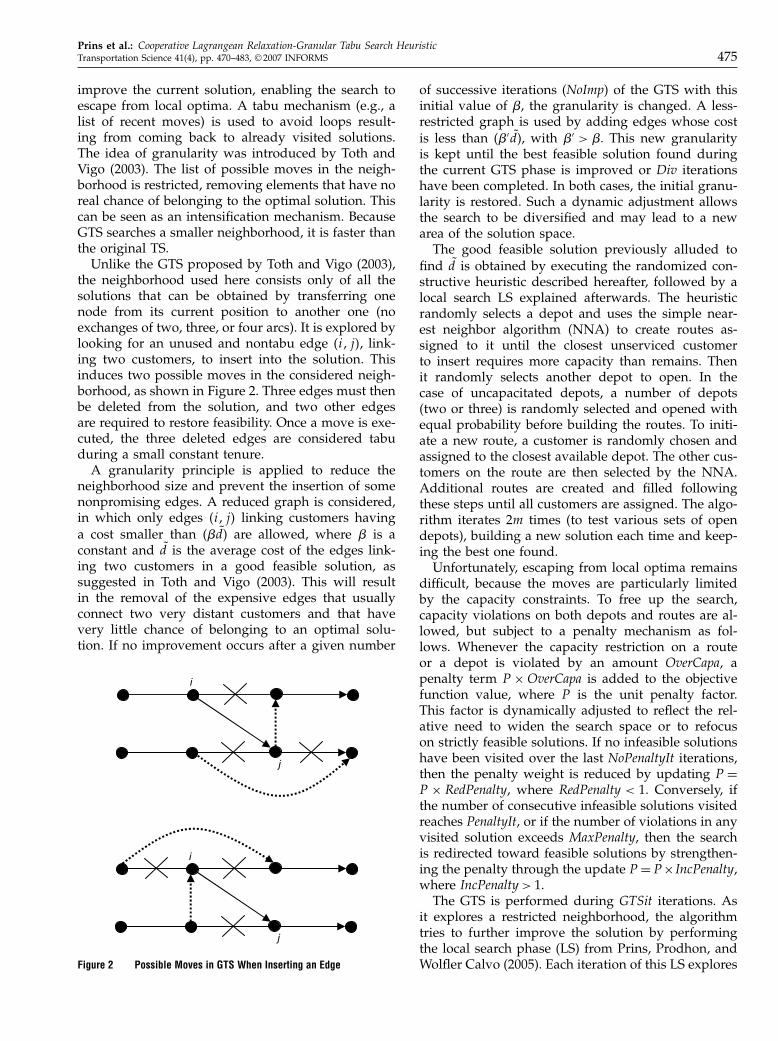
the neighborhood used here consists only of all thesolutions that can be obtained by transferring onenode from its current position to another one (noexchanges of two, three, or four arcs). It is explored bylooking for an unused and nontabu edge �i� j�, link-ing two customers, to insert into the solution. Thisinduces two possible moves in the considered neigh-borhood, as shown in Figure 2. Three edges must thenbe deleted from the solution, and two other edgesare required to restore feasibility. Once a move is exe-cuted, the three deleted edges are considered tabuduring a small constant tenure.A granularity principle is applied to reduce the
neighborhood size and prevent the insertion of somenonpromising edges. A reduced graph is considered,in which only edges �i� j� linking customers havinga cost smaller than (*d) are allowed, where * is aconstant and d is the average cost of the edges link-ing two customers in a good feasible solution, assuggested in Toth and Vigo (2003). This will resultin the removal of the expensive edges that usuallyconnect two very distant customers and that havevery little chance of belonging to an optimal solu-tion. If no improvement occurs after a given number
i
i
j
j
Figure 2 Possible Moves in GTS When Inserting an Edge
of successive iterations (NoImp) of the GTS with thisinitial value of *, the granularity is changed. A less-restricted graph is used by adding edges whose costis less than (*′d), with *′ > *. This new granularityis kept until the best feasible solution found duringthe current GTS phase is improved or Div iterationshave been completed. In both cases, the initial granu-larity is restored. Such a dynamic adjustment allowsthe search to be diversified and may lead to a newarea of the solution space.The good feasible solution previously alluded to
find d is obtained by executing the randomized con-structive heuristic described hereafter, followed by alocal search LS explained afterwards. The heuristicrandomly selects a depot and uses the simple near-est neighbor algorithm (NNA) to create routes as-signed to it until the closest unserviced customerto insert requires more capacity than remains. Thenit randomly selects another depot to open. In thecase of uncapacitated depots, a number of depots(two or three) is randomly selected and opened withequal probability before building the routes. To initi-ate a new route, a customer is randomly chosen andassigned to the closest available depot. The other cus-tomers on the route are then selected by the NNA.Additional routes are created and filled followingthese steps until all customers are assigned. The algo-rithm iterates 2m times (to test various sets of opendepots), building a new solution each time and keep-ing the best one found.Unfortunately, escaping from local optima remains
difficult, because the moves are particularly limitedby the capacity constraints. To free up the search,capacity violations on both depots and routes are al-lowed, but subject to a penalty mechanism as fol-lows. Whenever the capacity restriction on a routeor a depot is violated by an amount OverCapa, apenalty term P ×OverCapa is added to the objectivefunction value, where P is the unit penalty factor.This factor is dynamically adjusted to reflect the rel-ative need to widen the search space or to refocuson strictly feasible solutions. If no infeasible solutionshave been visited over the last NoPenaltyIt iterations,then the penalty weight is reduced by updating P =P × RedPenalty, where RedPenalty < 1. Conversely, ifthe number of consecutive infeasible solutions visitedreaches PenaltyIt, or if the number of violations in anyvisited solution exceeds MaxPenalty, then the searchis redirected toward feasible solutions by strengthen-ing the penalty through the update P = P × IncPenalty,where IncPenalty> 1.The GTS is performed during GTSit iterations. As
it explores a restricted neighborhood, the algorithmtries to further improve the solution by performingthe local search phase (LS) from Prins, Prodhon, andWolfler Calvo (2005). Each iteration of this LS explores

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic476 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
three neighborhoods, different from the one searchedin GTS, in the following given order. In all three cases,capacity constraints on depots and routes must berespected.• MOVE. One customer is shifted from its current
position to another position, in the same route or ina different route, which may be assigned to the samedepot or not.• SWAP. Two customers are exchanged. They may
belong to the same route or, if residual capacitiesallow it, to two distinct routes sharing one commondepot, or not.• OPT. This is an extended 2-opt procedure in
which two nonconsecutive edges are removed, eitherin the same route (this case is equivalent to the well-known 2-opt move; see Lin and Kernighan 1973) orin two distinct routes assigned to a common depot ornot. When they belong to different routes, there areseveral ways of reconnecting the trips. If they are fromdifferent depots, edges connecting the last customersof the two considered routes to their depot have tobe replaced to satisfy the constraint imposing that aroute must begin and finish at the same depot.The three neighborhoods can be searched in O�n2�.
At each iteration, LS performs the first improvingmove detected. It stops when no additional improve-ment is reached. As the routing phase does not mod-ify the set of open depots, the overall algorithmgoes back to a new phase of location, where theLagrangean relaxation is applied again.
4. The Whole Cooperative HeuristicThe approach proposed to solve the LRP uses prob-lem-specific knowledge. It deals with a depot loca-tion phase, obtained by aggregation of the customersbelonging to each route into supercustomers andsolved by Lagrangean relaxation (LR), and a rout-ing phase, handled by a GTS. The method is calledLRGTS. A natural cooperation steps in with no hier-archy. This synergy strengthens the method: The loca-tion phase provides a fixed set of open depots, andthe routing phase gives the supercustomers from theaggregation of the customers of each route. A globaliteration of the algorithm corresponds to solving bothphases. However, the basic scheme of the methodconverges too fast to a local optimum. Indeed, depotlocation strongly depends on the choice of the super-customers, and the routing (from which the super-customers come) is strongly determined by the depotlocation. Thus, a cooperative restart has to be intro-duced to provide further information and free up thesearch simultaneously.At the end of each global iteration, a frequency
counter is updated for each edge used and the con-vergence of the algorithm is checked. If the current
1: //Initialization2: Create a good solution S0 for GTS with a heuristic3: Create the granular graphs by using * and *′
4: NbRestart= 0 //Number of restarts executed5: Cbest =Cost�S0�
//Initialize the cost of the best solution with the cost of S06: Sbest = S0 //Initialize the best solution with S07: Clast =+� //Initialize the cost of the last global iteration8: Create the initial solution S of the cooperative
method9: //Main Loop10: repeat11: //Restart12: if (Cost�S�≥Clast) then13: Create new routes using edge frequencies14: LastCost=+�15: NbRestart=NbRestart+ 116: else17: Clast =Cost�S�18: end if19: //Location phase20: Create the supercustomers from S21: Operate the location step with Lagrangean relaxation22: Convert the supercustomers into routes to have a
feasible LRP solution S23: //Routing phase24: Apply GTS to S25: Apply LS to S26: //Memorization27: Update edge frequency for each edge used in S28: if �Cost�S� < Cbest) then29: Cbest =Cost�S�30: Sbest = S31: end if32: until (NbRestart>MaxRest)33: return(Sbest)
Figure 3 Overview of the Algorithm
solution has not been improved during the global iter-ation, a restart is applied and takes place before thebeginning of the location phase (see Figure 3). Thetrips resulting from the last routing phase are dis-carded and rebuilt by a heuristic in which the numberof edges 1 to connect customers is limited. The goal isto give some flexibility to the location phase by com-puting new trips (more numerous) that, once aggre-gated, give super customers with smaller demand.The heuristic builds a list L of edges sorted in decreas-ing frequency order and initializes U , the list of edgeslinking customers inserted into the trips, to an emptyset. Then, iteratively, the first elements of L (begin-ning with the most frequently used edges) are addedto U , provided that no fork is created (the degree ofeach customer node is at most two) and that the loadof each connected component of U does not exceedthe vehicle capacity. It stops either when �U � =1 orwhen no connected component can be extended with-out violating vehicle capacity. The resulting connectedcomponents in U provide the supercustomers forthe following location phase. However, to keep somediversity at each restart, each edge in L is consideredwith a given probability prob.

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 477
1 is initially set to a small value 1init in relationwith the maximum number of edges in a solution.Afterward, at each new restart, as the informationprovided by edge frequency counters becomes moreand more accurate, 1 increases by a factor g > 1. Thisprinciple can be seen as fixing an increasing numberof variables in each new solution. At the beginningof the algorithm, no edge frequency is available, sothe initial solution of the algorithm is built with NNAlimiting the load of routes to the maximal customerdemand.An overview of the method is given in Figure
3. The parameter MaxRest represents the number ofrestarts to perform used as the stopping criterion.With the diversification technique exploiting informa-tion on the most promising edges linking customers,the algorithm becomes more efficient and providesbetter solutions, as shown in the next section.
5. Computational StudyLRGTS is evaluated on three sets of randomly gener-ated Euclidean instances described in §5.1. The settingof the parameters, the three algorithms and the lower
Table 1 Results for the First Set with Capacitated Depots, with Gap to BKR
GRASP LRGTSBKR
n m � Q Cost Cost dep r t T Gap Cost dep r t T Gap
20 5 0 a 54�793 55,021 3 5 02 042 55,131 3 5 04 0.6220 5 0 b 39�104 39,104∗ 2 3 02 000 39,104∗ 2 3 02 0.0020 5 2 a 48�908 48,908∗ 3 5 01 000 48,908∗ 3 5 05 0.0020 5 2 b 37�542 37,542∗ 2 3 02 000 37,542∗ 2 3 01 0.0050 5 0 a 90�111 90,632 3 12 18 058 90,160 3 12 03 0.0550 5 0 b 63�242 64,761 2 6 18 240 63,256 2 6 10 0.0250 5 2 a 88�298 88,786 3 12 24 055 88,715 3 12 18 0.4750 5 2 b 67�340 68,042 3 6 25 104 67,698 3 6 18 0.5350 5 2’ a 84�055 84,055∗ 3 12 17 000 84,181 3 12 20 0.1550 5 2’ b 51�822 52,059 3 6 26 046 51,992 3 6 09 0.3350 5 3 a 86�203 87,380 2 12 23 137 86,203∗ 2 12 03 0.0050 5 3 b 61�830 61,890 2 6 20 010 61,830∗ 2 6 05 0.00
100 5 0 a 275�993 279,437 3 24 276 125 277,935 3 24 87 0.70100 5 0 b 214�392 216,159 3 12 232 082 214,885 3 11 83 0.23100 5 2 a 194�598 199,520 2 24 174 253 196,545 2 24 23 1.00100 5 2 b 157�173 159,550 2 11 224 151 157,792 2 11 33 0.39100 5 3 a 200�246 203,999 2 25 216 187 201,952 2 24 24 0.85100 5 3 b 152�586 154,596 2 11 203 132 154,709 2 12 29 1.39100 10 0 a 290�429 323,171 4 26 374 1127 291,887 3 26 141 0.50100 10 0 b 234�641 271,477 4 12 295 1570 235,532 3 12 140 0.38100 10 2 a 244�265 254,087 3 25 391 402 246,708 3 24 144 1.00100 10 2 b 203�988 206,555 3 11 298 126 204,435 3 11 101 0.22100 10 3 a 253�344 270,826 3 25 354 690 258,656 3 25 133 2.10100 10 3 b 204�597 216,173 3 11 398 566 205,883 3 11 108 0.63200 10 0 a 479�425 490,820 3 48 5175 238 481,676 3 47 620 0.47200 10 0 b 378�773 416,753 3 22 3791 1003 380,613 3 22 603 0.49200 10 2 a 450�468 512,679 3 49 5543 1381 453,353 3 48 603 0.64200 10 2 b 374�435 379,980 3 23 3674 148 377,351 3 23 769 0.78200 10 3 a 472�898 496,694 3 46 4248 503 476,684 3 47 772 0.80200 10 3 b 364�178 389,016 3 22 2902 682 365,250 3 22 733 0.29
Average 197�323 207,322 2.8 17.2 965 335 198,552 2.7 17.1 175 0.50
∗Solution cost is equal to the BKR.
bound used for comparisons are briefly presentedin §5.2. Tables of results are provided and discussedin §5.3. Subsection 5.4 provides further analysis aboutthe obtained solutions.
5.1. InstancesThe first set contains 30 LRP instances with capac-itated routes and depots, created for our previouswork on a multistart local search method (Prins, Prod-hon, and Wolfler Calvo 2004) and also used for aGRASP (Prins, Prodhon, and Wolfler Calvo 2005). Itcontains the largest instances with capacitated depots(200 customers) and is reused in this study to com-pare the performances of LRGTS with respect to thebest-known results (BKR) and GRASP. Its main char-acteristics are shown in Table 1: number of depotsm ∈ �5�10�, number of clients n ∈ �20�50�100�200�,vehicle capacity Q ∈ �70�150�, and number of clus-ters * ∈ �0�2�3�. The case *= 0 corresponds in fact toa uniform distribution of customers in the Euclideanplane. These instances in which all numbers are inte-ger were generated as follows. For given choices ofm, n, Q, and *, the customers’ locations are randomly

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic478 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
Table 2 Results for the Second Set with Capacitated Depots, with Gap to LB
CH GRASP LRGTSLB
n m Q Cost Cost Gap Cost dep r t Gap Cost dep r t Gap
21 5 6�000 4249∗ 4359 26 4296 2 5 11 4249∗ 2 4 0022 5 4�500 5851∗ 5915 11 5851∗ 1 3 00 5874 1 3 0427 5 2�500 3�0620∗ 3�0620∗ 00 3�0620∗ 2 4 00 3�0652 2 4 0129 5 4�500 5121∗ 5121∗ 00 5151 2 4 06 5121∗ 2 4 0032 5 8�000 5565 5717 27 5719 2 4 28 5846 2 4 5032 5 11�000 5043∗ 5114 14 5043∗ 1 3 00 5048 1 3 0136 5 250 4604∗ 4707 22 4604∗ 1 4 00 4765 1 4 3550 5 160 5494 5827 61 5991 3 8 91 5864 2 6 6775 10 140 7447 8863 190 8616 3 9 157 8635 3 10 16088 8 9�000�000 3564 3849 80 3569 2 8 01 3687 2 6 35
100 10 200 7886 8894 128 8616 3 9 93 8429 2 8 69134 8 850 — 6�2380 74 5�9651 4 11 27 5�8090 3 11 00150 10 8�000�000 43�4060 46�6427 75 44�6252 3 13 28 44�3863 3 14 23
Average 4�4430 4�7523 54 4�5691 2.2 6.5 34 4�5394 2.0 6.2 34
∗Proven optima.
chosen in the Euclidean plane, and the traveling costscij correspond to the distances, multiplied by 100 androunded up to the nearest integer. The two instanceswith 50 customers, * = 2′, contain two strongly sepa-rated clusters. Finally, the other data (demands, depotcapacities, and fixed costs) are selected. In particular,each demand follows a uniform distribution in inter-val {10, 20} and depot capacities are chosen in such away that at least two or three depots must be opened.The second set of 13 instances listed in Table 2 was
gathered by Barreto (2004b) in his thesis on cluster-ing heuristics for the LRP (see Barreto 2004a for siteto download). These files either come from the LRPliterature or are obtained by adding several depots toclassical VRP instances. Their traveling costs are equalto the Euclidean distances (not rounded), and allroutes are capacitated. Except in a few instances, alldepots also have a limited capacity. The table showsthat vehicle capacity and demands are sometimeshuge. The main interest of these instances resides inthe lower bounds given by Barreto and in the solu-tion values obtained by his heuristics. No other setenables an estimate of the deviation of algorithms tooptimality.The third set comprises 36 instances with uncapac-
itated depots designed by Tuzun and Burke (1999)to evaluate a TS. They use n ∈ �100�150�200�, m ∈�10�20�, Q = 150, and uniform demands in interval{1, 20}. As in the first set, spatial distribution of cus-tomers is controlled: There are zero, three, or five clus-ters (zero corresponding to a uniform distribution),and the percentage of customers P that belong to acluster is fixed at 75% or 100%. As in the second set,distances are not rounded.
5.2. Implementation, Parameters, and AlgorithmsCompared
Our earlier algorithm GRASP and the LRGTS arecoded in Visual C++ and have been tested on a DellPC Optiplex GX260, with a 2.4 GHz Pentium 4, 512MB of RAM, and Windows XP. The following parame-ters for LRGTS have been selected after a preliminarytesting phase in order to provide the best averagesolution values:• 1init = 3+ �n− k�× 0 25 with k =∑
j∈J dj/Q, max-imal number of restarts MaxRest= n/3;• location phase: g = 1 15, prob = 0 80, LagrIt =
200;• GTS phase: GTSit = n, * = 1 20, *′ = 1 85,
NoImp = 0 05n, Div = 0 20n, initial value of P =2*d/AvDem (AvDem being the average customer de-mand), NoPenaltyIt = 3, MaxPenalty = 3, PenaltyIt =0 08n, RedPenalty = 0 8, IncPenalty = 1 4, and a tabutenure equal to 0 15n.The GRASP described in Prins, Prodhon, and
Wolfler Calvo (2005) is based on an extended and ran-domized version of the Clarke and Wright savingsheuristic for the VRP: When two routes are merged,the new route may be reassigned to another depot,which can be closed or already open. The purpose ofthis heuristic is to provide good trial solutions, with afixed set of open depots, to the local search phase. Theresults are improved by adding a memory to diversifythe subsets of open depots and a postoptimizationbased on a path-relinking process.The source codes of the other two algorithms
(Tuzun and Burke 1999; Barreto 2004b) and of thelower bound presented in the sequel were not avail-able to us. Hence, our tables report the solution valuesand running times given by their authors.Barreto’s clustering heuristic (2004b) is in fact a
generic three-phase method that (1) builds clusters of

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 479
customers compatible with vehicle capacity, (2) solvesa TSP in each cluster, and (3) selects the open depotsand assigns the resulting TSP tours to them by solvinga single-source capacitated facility-location problem.Twenty-four versions are obtained by combining fourclustering methods and six proximity measures, andthe best solution is reported for each instance. Barretohas also obtained a lower bound (LB) by applying acutting-plane algorithm to a relaxed two-index inte-ger linear programming formulation of the LRP. Themachine used is not specified.The last method compared with LRGTS is a TS de-
signed specifically by Tuzun and Burke for the caseof uncapacitated depots (Tuzun and Burke 1999). Asa result of this assumption, these authors developed avery fast algorithm that solves a sequence of subprob-lems in which only 1�2�3 depots are open. Thisprocess stops when adding one more depot wouldresult in a degraded solution, and in general this hap-pens early. Apart from the limited number of sub-problems that must actually be solved in practice, thelocal search for each subproblem is very fast, becausethe moves may exchange the open/closed status oftwo depots, but without changing the number of opendepots that is fixed in each subproblem. Moreover,it is important to note that this fast algorithm is notapplicable to the first two sets of instances with capaci-tated depots. Tuzun and Burke report their results ona 266 MHz Pentium II PC (18 times slower than ourcomputer, according to Dongarra 2006).
5.3. Discussion of ResultsIn the following tables, for each instance, costs inboldface indicate which method obtains the best re-sult, and times T are given in seconds. The costs re-ported as BKR are the best-known results. They havebeen obtained during testing phases of our methods,including LRGTS, using various parameters. The gapsbetween each method and a bound taken as reference(either BKR—Tables 1 and 3—or the lower bound—Table 2) are given in percentage. The numbers of de-pots and routes opened in the solution are reported,respectively, in columns dep and rt.
5.3.1. First Set. Table 1 provides a comparison be-tween LRGTS and our earlier method GRASP withthe BKR on the 30 instances from the first set. Aster-isks mean that solution cost is equal to the BKR.Thanks to the granularity system (see §5.4), LRGTS
is by far the fastest method, nearly 5.5 times fasterthan GRASP, while finding a best solution for 26 ofthe 30 instances and reaching 5 times the BKR. Itsbetter average solution quality can be explained byits robustness, which results from the use of specificknowledge about the problem, while the GRASP isa generic method with independent iterations. How-ever, GRASP is as good as LRGTS on the smallest
instances (n = 20), but its deviation to BKR exceeds10% on four large instances (n= 100 and 200).
5.3.2. Second Set. In Table 2, LRGTS is comparedwith GRASP and with the clustering heuristics CHand lower bound LB from Barreto. Asterisks indi-cate proven optima. The Gap columns correspond todeviations to LB in percentage, except for the next-to-last instance (n = 134 and m = 8) without lowerbound, where they give deviations to the best method(LRGTS).Both LRGTS and GRASP outperform Barreto’s
cocktail of 24 clustering heuristics and achieve almostthe same costs on average (gap around 3%). This con-firms the observation done on the first set: GRASPseems to work better on small instances, frequent inthe second set, while LRGTS is more efficient on largeones.The comparison with LB does not permit a con-
clusion about the quality of the obtained solutions,except on small instances, when the lower bound isproven optimal. On some large instances, the devia-tion may exceed 6% for all heuristics. Nevertheless, itis difficult to know whether the optimum is closer tothe LB or to the best heuristic.Running times are not provided for each instance
because of lack of space. In fact, all approximate meth-ods require less than one second for up to 50 cus-tomers. For n > 100, each clustering heuristic needsnearly one second (but 24 such heuristics are exe-cuted). When n < 100, LRGTS runs in less than sixseconds and GRASP in less than 24 seconds. On thetwo last (and largest) instances, LRGTS needs 13 and31 seconds, respectively, versus 50 and 156 secondsfor GRASP. Therefore, the GRASP gives slightly betterresults on average, but at the expense of a computa-tional effort quadrupled, compared with LRGTS.
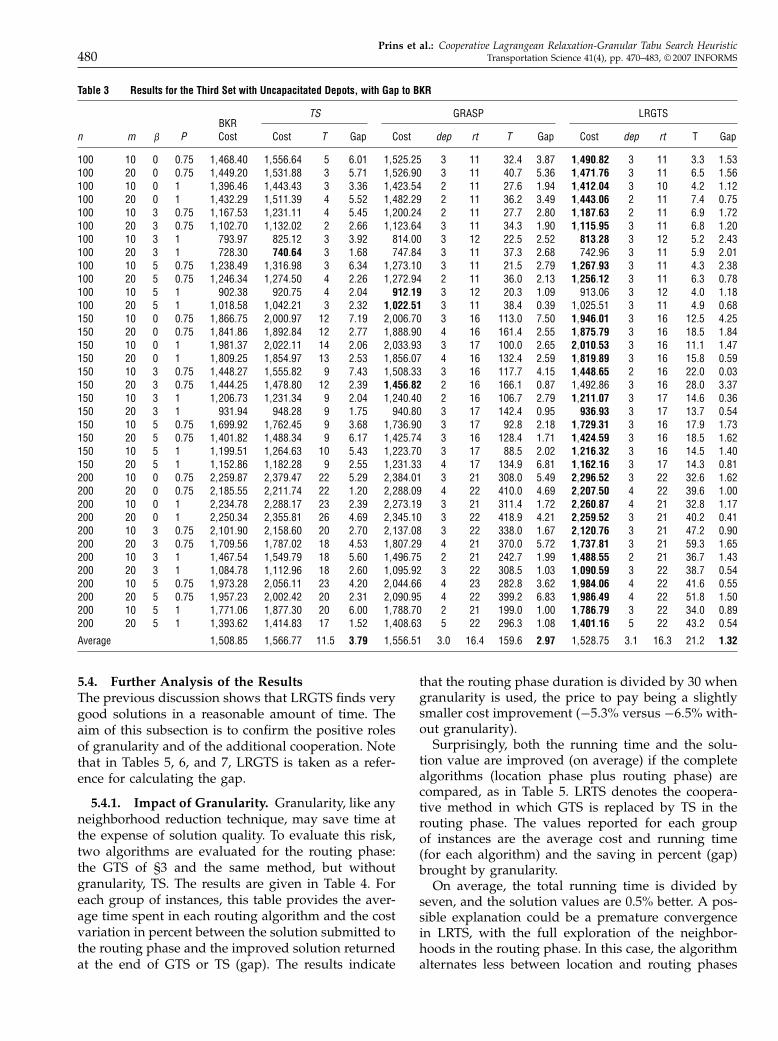
5.3.3. Third Set. Table 3 compares LRGTS withGRASP and with Tuzun and Burke’s TS. LRGTS ap-pears to be the most efficient method (gap of 1.32%with BKR, while TS and GRASP achieve 3.79% and2.97%, respectively); that is remarkable because itis not tailored for the special case of uncapacitateddepots. Of course, TS is much faster (reported timesare not scaled), but remember that it applies a strategy(progressive incrementation of the number of opendepots) and a local search that are no longer valid forthe capacitated case. Furthermore, TS has an averagegap more than two times higher than the one obtainedusing LRGTS, and it never provides the best cost.More precisely, its gap to BKR is always above 1%.Anyway, the larger duration of LRGTS is still reason-able for a strategic optimization problem that doesnot need to be solved every day. It is also interest-ing to notice that VRP literature reports much largerrunning times for VRP instances of 200 customers.
Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic480 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
Table 3 Results for the Third Set with Uncapacitated Depots, with Gap to BKR
TS GRASP LRGTSBKR
n m � P Cost Cost T Gap Cost dep rt T Gap Cost dep rt T Gap
100 10 0 075 1�46840 1�55664 5 601 1�52525 3 11 324 387 1�49082 3 11 33 153100 20 0 075 1�44920 1�53188 3 571 1�52690 3 11 407 536 1�47176 3 11 65 156100 10 0 1 1�39646 1�44343 3 336 1�42354 2 11 276 194 1�41204 3 10 42 112100 20 0 1 1�43229 1�51139 4 552 1�48229 2 11 362 349 1�44306 2 11 74 075100 10 3 075 1�16753 1�23111 4 545 1�20024 2 11 277 280 1�18763 2 11 69 172100 20 3 075 1�10270 1�13202 2 266 1�12364 3 11 343 190 1�11595 3 11 68 120100 10 3 1 79397 82512 3 392 81400 3 12 225 252 81328 3 12 52 243100 20 3 1 72830 74064 3 168 74784 3 11 373 268 74296 3 11 59 201100 10 5 075 1�23849 1�31698 3 634 1�27310 3 11 215 279 1�26793 3 11 43 238100 20 5 075 1�24634 1�27450 4 226 1�27294 2 11 360 213 1�25612 3 11 63 078100 10 5 1 90238 92075 4 204 91219 3 12 203 109 91306 3 12 40 118100 20 5 1 1�01858 1�04221 3 232 1�02251 3 11 384 039 1�02551 3 11 49 068150 10 0 075 1�86675 2�00097 12 719 2�00670 3 16 1130 750 1�94601 3 16 125 425150 20 0 075 1�84186 1�89284 12 277 1�88890 4 16 1614 255 1�87579 3 16 185 184150 10 0 1 1�98137 2�02211 14 206 2�03393 3 17 1000 265 2�01053 3 16 111 147150 20 0 1 1�80925 1�85497 13 253 1�85607 4 16 1324 259 1�81989 3 16 158 059150 10 3 075 1�44827 1�55582 9 743 1�50833 3 16 1177 415 1�44865 2 16 220 003150 20 3 075 1�44425 1�47880 12 239 1�45682 2 16 1661 087 1�49286 3 16 280 337150 10 3 1 1�20673 1�23134 9 204 1�24040 2 16 1067 279 1�21107 3 17 146 036150 20 3 1 93194 94828 9 175 94080 3 17 1424 095 93693 3 17 137 054150 10 5 075 1�69992 1�76245 9 368 1�73690 3 17 928 218 1�72931 3 16 179 173150 20 5 075 1�40182 1�48834 9 617 1�42574 3 16 1284 171 1�42459 3 16 185 162150 10 5 1 1�19951 1�26463 10 543 1�22370 3 17 885 202 1�21632 3 16 145 140150 20 5 1 1�15286 1�18228 9 255 1�23133 4 17 1349 681 1�16216 3 17 143 081200 10 0 075 2�25987 2�37947 22 529 2�38401 3 21 3080 549 2�29652 3 22 326 162200 20 0 075 2�18555 2�21174 22 120 2�28809 4 22 4100 469 2�20750 4 22 396 100200 10 0 1 2�23478 2�28817 23 239 2�27319 3 21 3114 172 2�26087 4 21 328 117200 20 0 1 2�25034 2�35581 26 469 2�34510 3 22 4189 421 2�25952 3 21 402 041200 10 3 075 2�10190 2�15860 20 270 2�13708 3 22 3380 167 2�12076 3 21 472 090200 20 3 075 1�70956 1�78702 18 453 1�80729 4 21 3700 572 1�73781 3 21 593 165200 10 3 1 1�46754 1�54979 18 560 1�49675 2 21 2427 199 1�48855 2 21 367 143200 20 3 1 1�08478 1�11296 18 260 1�09592 3 22 3085 103 1�09059 3 22 387 054200 10 5 075 1�97328 2�05611 23 420 2�04466 4 23 2828 362 1�98406 4 22 416 055200 20 5 075 1�95723 2�00242 20 231 2�09095 4 22 3992 683 1�98649 4 22 518 150200 10 5 1 1�77106 1�87730 20 600 1�78870 2 21 1990 100 1�78679 3 22 340 089200 20 5 1 1�39362 1�41483 17 152 1�40863 5 22 2963 108 1�40116 5 22 432 054
Average 1�50885 1�56677 11.5 379 1�55651 3.0 16.4 1596 297 1�52875 3.1 16.3 212 132
5.4. Further Analysis of the ResultsThe previous discussion shows that LRGTS finds verygood solutions in a reasonable amount of time. Theaim of this subsection is to confirm the positive rolesof granularity and of the additional cooperation. Notethat in Tables 5, 6, and 7, LRGTS is taken as a refer-ence for calculating the gap.
5.4.1. Impact of Granularity. Granularity, like anyneighborhood reduction technique, may save time atthe expense of solution quality. To evaluate this risk,two algorithms are evaluated for the routing phase:the GTS of §3 and the same method, but withoutgranularity, TS. The results are given in Table 4. Foreach group of instances, this table provides the aver-age time spent in each routing algorithm and the costvariation in percent between the solution submitted tothe routing phase and the improved solution returnedat the end of GTS or TS (gap). The results indicate
that the routing phase duration is divided by 30 whengranularity is used, the price to pay being a slightlysmaller cost improvement (−5 3% versus −6 5% with-out granularity).Surprisingly, both the running time and the solu-
tion value are improved (on average) if the completealgorithms (location phase plus routing phase) arecompared, as in Table 5. LRTS denotes the coopera-tive method in which GTS is replaced by TS in therouting phase. The values reported for each groupof instances are the average cost and running time(for each algorithm) and the saving in percent (gap)brought by granularity.On average, the total running time is divided by
seven, and the solution values are 0.5% better. A pos-sible explanation could be a premature convergencein LRTS, with the full exploration of the neighbor-hoods in the routing phase. In this case, the algorithmalternates less between location and routing phases

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 481
Table 4 Impact of Granularity on Routing
n m GTS T TS′ T
First set20 5 −91 00 −104 0050 5 −78 01 −88 09
100 5 −41 08 −47 148100 10 −26 11 −33 232200 10 −16 60 −25 3165
Average −50 16 −59 711
Second set≤50 5 −85 00 −101 02≤150 ≤10 −57 25 −71 418
Average −74 10 −90 162
Third set100 10 −61 13 −74 226100 20 −56 12 −66 160150 10 −50 53 −62 974150 20 −44 43 −56 1001200 10 −39 108 −52 3541200 20 −43 135 −57 4120
Average −49 61 −61 1670
Average −53 35 −65 1058
before performing a restart, and the solution space isless explored.
5.4.2. Impact of Restarts. In addition to the nat-ural cooperation realized by the alternation betweenthe two phases, the restarts based on statistics aboutthe most used edges are expected to diversify thesearch.Table 6 shows what happens when restarts are sup-
pressed, using the same indicators as in Table 5: theresulting algorithm is more than five times faster, but
Table 5 Impact of Granularity on Global Solution
n m LRGTS T LRTS T GAP
First set20 5 45,171 03 45,428 03 0550 5 74,254 11 75,264 21 15
100 5 200,636 46 200,949 181 01100 10 240,517 128 242,350 355 08200 10 422,488 683 421,862 3732 −02
Average 175 859 06
Second set≤50 5 8427 01 85034 03 15≤150 ≤10 10�4541 106 10�50508 484 11
Average 42 188 14
Third set100 10 1�18079 46 1�19038 253 07100 20 1�17589 63 1�19031 204 11150 10 1�59365 154 1�60211 1045 06150 20 1�45203 181 1�44782 1116 −03200 10 1�98959 375 1�98062 3732 −04200 20 1�78051 455 1�76734 4350 −07
Average 212 1783 02
Average 170 1170 05
Table 6 Impact of Restarts
n m LRGTS T No coop T Gap
First set20 5 45,171 03 45,171 04 0.050 5 74,254 11 74,445 11 0.3
100 5 200,636 46 200,922 42 0.1100 10 240,517 128 240,539 108 0.0200 10 422,488 683 423,421 562 0.2
Average 175 146 0.1
Second set≤50 5 84274 01 84927 01 1.3≤150 ≤10 10�4540 106 10�37831 92 0.5
Average 42 36 1.0
Third set100 10 1�18079 46 1�19035 43 0.8100 20 1�17589 63 1�18338 65 0.5150 10 1�59365 154 1�59486 128 0.1150 20 1�45203 181 1�45265 165 0.1200 10 1�98959 375 1�99132 319 0.1200 20 1�78051 455 1�78644 352 0.3
Average 212 179 0.3
Average 170 143 0.4
the cost increases by 3.6% on average, thus provingthe importance of diversifying the search.In Table 7, which still uses the same indicators,
LRGTS is compared with a version using restarts,but without the additional cooperation based on edgestatistics. Each restart is based on a heuristic that cre-ates a new route by randomly selecting one customerand completing the route using the NNA. This blinddiversification is sufficient to improve the results ofthe version without restarts (compare with Table 6),
Table 7 Impact of Using Information on the Edges
n m LRGTS T No coop T Gap
First set20 5 45,171 03 45,171 04 0.050 5 74,254 11 74,445 11 0.3
100 5 200,636 46 200,922 42 0.1100 10 240,517 128 240,539 108 0.0200 10 422,488 683 423,421 562 0.2
Average 175 146 0.1
Second set≤50 5 84274 01 84927 01 1.3≤150 ≤10 10�4540 106 10�37831 92 0.5
Average 42 36 1.0
Third set100 10 1�18079 46 1�19035 43 0.8100 20 1�17589 63 1�18338 65 0.5150 10 1�59365 154 1�59486 128 0.1150 20 1�45203 181 1�45265 165 0.1200 10 1�98959 375 1�99132 319 0.1200 20 1�78051 455 1�78644 352 0.3
Average 212 179 0.3
Average 170 143 0.4
Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search Heuristic482 Transportation Science 41(4), pp. 470–483, © 2007 INFORMS
n/200
n/50
n/20
nn/2n/3
n/4n/5n/6
n/7
n/8n/9
n/10
0 10 20 30 40 50 60 70
Time in seconds
Gap
in p
erce
nta
ge
5.0
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
Figure 4 Impact of Number of Restarts (MaxRest )
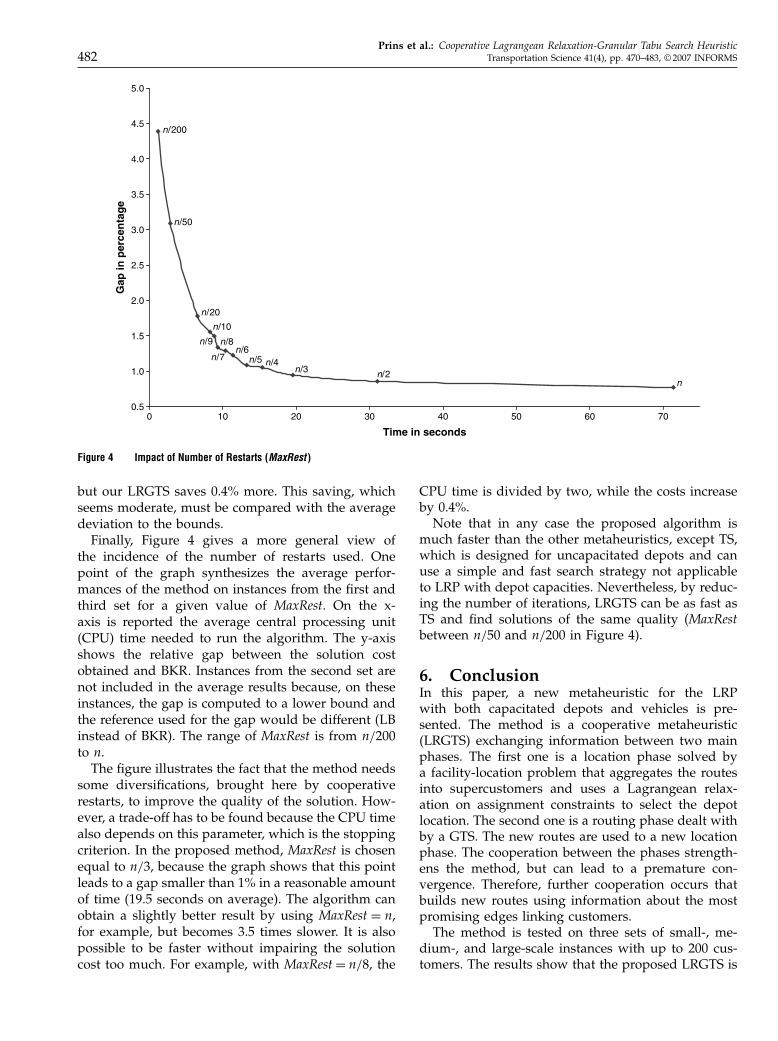
but our LRGTS saves 0.4% more. This saving, whichseems moderate, must be compared with the averagedeviation to the bounds.Finally, Figure 4 gives a more general view of
the incidence of the number of restarts used. Onepoint of the graph synthesizes the average perfor-mances of the method on instances from the first andthird set for a given value of MaxRest. On the x-axis is reported the average central processing unit(CPU) time needed to run the algorithm. The y-axisshows the relative gap between the solution costobtained and BKR. Instances from the second set arenot included in the average results because, on theseinstances, the gap is computed to a lower bound andthe reference used for the gap would be different (LBinstead of BKR). The range of MaxRest is from n/200to n.The figure illustrates the fact that the method needs
some diversifications, brought here by cooperativerestarts, to improve the quality of the solution. How-ever, a trade-off has to be found because the CPU timealso depends on this parameter, which is the stoppingcriterion. In the proposed method, MaxRest is chosenequal to n/3, because the graph shows that this pointleads to a gap smaller than 1% in a reasonable amountof time (19.5 seconds on average). The algorithm canobtain a slightly better result by using MaxRest = n,for example, but becomes 3.5 times slower. It is alsopossible to be faster without impairing the solutioncost too much. For example, with MaxRest= n/8, the
CPU time is divided by two, while the costs increaseby 0.4%.Note that in any case the proposed algorithm is
much faster than the other metaheuristics, except TS,which is designed for uncapacitated depots and canuse a simple and fast search strategy not applicableto LRP with depot capacities. Nevertheless, by reduc-ing the number of iterations, LRGTS can be as fast asTS and find solutions of the same quality (MaxRestbetween n/50 and n/200 in Figure 4).
6. ConclusionIn this paper, a new metaheuristic for the LRPwith both capacitated depots and vehicles is pre-sented. The method is a cooperative metaheuristic(LRGTS) exchanging information between two mainphases. The first one is a location phase solved bya facility-location problem that aggregates the routesinto supercustomers and uses a Lagrangean relax-ation on assignment constraints to select the depotlocation. The second one is a routing phase dealt withby a GTS. The new routes are used to a new locationphase. The cooperation between the phases strength-ens the method, but can lead to a premature con-vergence. Therefore, further cooperation occurs thatbuilds new routes using information about the mostpromising edges linking customers.The method is tested on three sets of small-, me-
dium-, and large-scale instances with up to 200 cus-tomers. The results show that the proposed LRGTS is

Prins et al.: Cooperative Lagrangean Relaxation-Granular Tabu Search HeuristicTransportation Science 41(4), pp. 470–483, © 2007 INFORMS 483
able to improve more than 80% of the values obtainedeither by heuristics or metaheuristics. This is alsotrue when depots are uncapacitated, although it iscompared to a TS specially tailored for this partic-ular case of the LRP. Furthermore, even if its goodperformance is especially noticeable on large scaleinstances, LRGTS is able to find optimal solutions onsmall instances by reaching the lower bound com-puted by Barreto (2004b). These good results can beexplained by the use of problem-specific knowledgethat in addition leads to a fast algorithm. Moreover,the CPU times can be modulated at the price of aslight variation of the solution costs.
AcknowledgmentsThe authors would like to thank the referees for their help-ful and careful remarks, which have helped improve thequality of the paper. This research is partially supported bythe Conseil Regional de Champagne-Ardenne (Champagne-Ardenne District Council) and by the European Social Fund.
ReferencesAhlander, F. 1994. The capacitated facility location problem with
single sourcing. Unpublished doctoral dissertation, LinkopingUniversity, Sweden.
Albareda-Sambola, M., J. A. Díaz, E. Fernández. 2005. A compactmodel and tight bounds for a combined location-routing prob-lem. Comput. Oper. Res. 32(3) 407–428.
Barreto, S. S. 2004a. Home page of Sérgio Sautos Barreto. http://sweet.ua.pt/iscf143.
Barreto, S. S. 2004b. Análise e Modelização de Problemas delocalização-distribuição [Analysis and modelling of location-routing problems]. Unpublished doctoral dissertation, Univer-sity of Aveiro, Campus Universitário de Santiago, 3810-193Aveiro, Portugal.
Beasley, J. E. 1993. Lagrangean heuristics for location problems. Eur.J. Oper. Res. 65 383–399.
Bruns, A., A. Klose. 1996. A “locate first-route second” heuristicfor a combined location-routeing problem. U. Zimmermann,U. Derigs, W. Gaul, R. H. Mohring, K. P. Schuster, eds. Opera-tions Research Proceedings. Springer, Braunschweig, Germany.
Chan, Y., W. B. Carter, M. D. Burnes. 2001. A multiple-depot,multiple-vehicle, location-routing problem with stochasticallyprocessed demands. Comput. Oper. Res. 28 803–826.
Chien, T. W. 1993. Heuristic procedures for practical-sized uncapac-itated location-capacitated routing problems. Decision Sci. 24(5)995–1021.
Cortinhal, M. J., M. E. Captivo. 2003. Upper and lower bounds forthe single source capacitated location problem. Eur. J. Oper. Res.151 333–351.
Dongarra, Jack J. 2006. Performance of various computers usingstandard linear equations software. Technical Report CS-89-85,University of Tennessee.
Ghiani, G., G. Laporte. 2001. Location-arc routing problems.OPSEARCH 38 151–159.
Glover, F., M. Laguna. 1997. Tabu Search. Kluwer Academic Pub-lishers, Boston, MA.
Labadi, N. 2003. Problèmes tactiques et stratégiques en tournées surarcs [Tactical and strategic problems on arc routing]. Unpub-lished doctoral thesis, University of Technology of Troyes,France.
Laporte, G., F. Louveaux, H. Mercure. 1989. Models and exact solu-tions for a class of stochastic location-routing problems. Eur. J.Oper. Res. 39 71–78.
Laporte, G., Y. Norbert, S. Taillefer. 1988. Solving a family of multi-depot vehicle routing and location-routing problems. Trans-portation Sci. 22(3) 161–167.
Lin, S., B. W. Kernighan. 1973. An effective heuristic algorithm forthe traveling salesman problem. Oper. Res. 21 498–516.
Min, H., V. Jayaraman, R. Srivastava. 1998. Combined location-routing problems: A synthesis and future research directions.Eur. J. Oper. Res. 108 1–15.
Pirkul, H. 1987. Efficient algorithm for the capacitated concentratorlocation problem. Comput. Oper. Res. 14 197–208.
Pisinger, D. 1997. A minimal algorithm for the 0-1 knapsack prob-lem. Oper. Res. 45 758–767.
Prins, C., C. Prodhon, R. Wolfler Calvo. 2004. Nouveaux algorithmespour le problème de localisation et routage sous contraintes decapacité. A. Dolgui, S. Dauzère-Pérès, eds. MOSIM ’04, Vol. 2.Lavoisier, Ecole des Mines de Nantes, France, 1115–1122.
Prins, C., C. Prodhon, R. Wolfler Calvo. 2005. A reactive GRASPand path relinking algorithm for the capacitated location rout-ing problem. CD Proc. Internat. Conf. Indust. Engrg. SystemsManagement, Marrakech, Morocco, May.
Prins, C., C. Prodhon, R. Wolfler Calvo. 2006. Solving the capaci-tated location-routing problem by a GRASP complemented bya learning process and a path relinking. 4OR—Quart. J. Oper.Res. 4(3) 221–238.
Salhi, S., G. K. Rand. 1989. The effect of ignoring routes when locat-ing depots. Eur. J. Oper. Res. 39 150–156.
Srivastava, R. 1993. Alternate solution procedures for the locating-routing problem. OMEGA Internat. J. Management Sci. 21(4)497–506.
Toth, P., D. Vigo. 2003. The granular tabu search (and its applica-tion to the vehicle routing problems. INFORMS J. Comput. 15(4)333–346.
Tuzun, D., L. I. Burke. 1999. A two-phase tabu search approach tothe location routing problem. Eur. J. Oper. Res. 116 87–99.
Wu, T. H., C. Low, J. W. Bai. 2002. Heuristic solutions to multi-depotlocation-routing problems. Comput. Oper. Res. 29 1393–1415.
Related Documents











