Laboratorio di Calcolo B 6 Soluzione di sistemi di Soluzione di sistemi di equazioni differenziali equazioni differenziali Potreste avere l’impressione di non sapere nulla sulle equazioni differenziali, e di non averne mai incontrata una. In realtà questa impressione è sbagliata, perché la legge di Newton F = ma si può scrivere nella forma F(x(t),t) = mx’’(t) che mostra esplicitamente come si tratta in sostanza di una equazione differenziale del secondo ordine. Nel seguito ci riferiremo in modo esplicito alla risoluzione delle equazioni del moto, anche se i metodi illustrati sono di validità generale

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Laboratorio di Calcolo B 6
Soluzione di sistemi di Soluzione di sistemi di equazioni differenzialiequazioni differenziali
Potreste avere l’impressione di non sapere nulla sulle equazioni differenziali, e di non averne mai incontrata una. In realtà questa impressione è sbagliata, perché la legge di Newton
F = masi può scrivere nella forma
F(x(t),t) = mx’’(t)che mostra esplicitamente come si tratta in sostanza di una equazione differenziale del secondo ordine.Nel seguito ci riferiremo in modo esplicito alla risoluzione delle equazioni del moto, anche se i metodi illustrati sono di validità generale

Laboratorio di Calcolo B 7
Equazioni differenziali lineari Equazioni differenziali lineari Si tratta di equazioni del tipo:
dove x(t) è la funzione incognita e le an(t) sono funzioni note. In generale, un’equazione differenziale non possiede una singola soluzione (ovvero una singola funzione x(t) che la soddisfi), ma una famiglia di soluzioni. La soluzione appropriata per un dato problema è quella che rispetta le condizioni al contorno. Nel caso si stia studiando una evoluzione temporale, le condizioni al contorno sono date come i valori della funzione e delle sue derivate fino alla (n-1)-esima ad un dato istante (ad esempio per t=0).
0)()()()()()()()( )(210 =+++′′+′+ KK txtatxtatxtatxta n
n

Laboratorio di Calcolo B 8
Il metodo di Il metodo di EuleroEuleroConsideriamo un’ equazione del primo ordine:
cui è associata la condizione iniziale x(0) = x0.L’equazione medesima ci fornisce il valore della derivata prima (la velocità) al tempo t=0:
Se assumiamo che in un breve intervallo ∆t la velocità resti costante potremo scrivere, applicando la formula del moto rettilineo uniforme:
Questa relazione, nota la posizione iniziale x(0) ci fornisce x(∆t) al primo ordine. La procedura può essere iterata per ricavare x(t) a t generico. La precisione è modesta.
( )ttxftbtxtatx ),()()()()( =+=′
( )0),0()0( xfx =′
txfxtxxtx ∆+=∆′+=∆ )0,()0()0()( 00

Laboratorio di Calcolo B 9
La serie di La serie di TaylorTaylorPer chiarire che cose si intende con “ricavare x(t) al primo ordine” dobbiamo introdurre la serie di Taylor. Si può dimostrare che se una funzione f(x) e tutte le sue derivate sono continue in un intervallo vale la relazione
dove x e x0 sono punti generici dell’intervallo. In altre parole la serie di Taylor ci garantisce che la conoscenza del valore di una funzione e di tutte le sue derivate in un punto x0 è sufficiente a determinare il valore della funzione in un punto generico x.
K
K
+−+
++−′′+−′+=
nn xxxfn
xxxfxxxfxfxf
))((!1
))((21))(()()(
00)(
200000

Laboratorio di Calcolo B 10
Precisione degli sviluppi di Precisione degli sviluppi di TaylorTaylorSe applichiamo la serie di Taylor al nostro problema di estrapolare il moto di un corpo note la posizione e le sue derivate calcolate al tempo t=0, possiamo ottenere precisioni differenti troncando la serie in diverse posizioni.
Ordine Zero )()0()( tOxtx ∆+=∆
Si assume che la velocità sia nulla (cioè che la posizione resti costante)

Laboratorio di Calcolo B 11
Precisione degli sviluppi di Precisione degli sviluppi di TaylorTaylorSe applichiamo la serie di Taylor al nostro problema di estrapolare il moto di un corpo note la posizione e le sue derivate calcolate al tempo t=0, possiamo ottenere precisioni differenti troncando la serie in diverse posizioni.
Ordine Zero )()0()( tOxtx ∆+=∆
Primo Ordine )()0()0()( 2tOtxxtx ∆+∆′+=∆
Si assume che l’accelerazione sia nulla (cioè che la velocità resti costante)

Laboratorio di Calcolo B 12
Precisione degli sviluppi di Precisione degli sviluppi di TaylorTaylorSe applichiamo la serie di Taylor al nostro problema di estrapolare il moto di un corpo note la posizione e le sue derivate calcolate al tempo t=0, possiamo ottenere precisioni differenti troncando la serie in diverse posizioni.
Ordine Zero )()0()( tOxtx ∆+=∆
Primo Ordine )()0()0()( 2tOtxxtx ∆+∆′+=∆
Secondo Ordine )()0(21)0()0()( 32 tOtxtxxtx ∆+∆′′+∆′+=∆
Si assume che la derivata dell’accelerazione sia nulla (cioè che l’accelerazione resti costante)

Laboratorio di Calcolo B 13
Il metodo di Il metodo di RungeRunge--KuttaKuttaPer ottenere una precisione maggiore occorre eseguire uno sviluppo al secondo ordine:
Abbiamo però il problema di ricavare x’’(0).Sviluppiamo al prim’ordine x’(∆t/2):
da cui:
2)0(21)0()0()( txtxxtx ∆′′+∆′+=∆
2)0()0(
2txxtx ∆′′+′=
∆′
′−
∆′
∆=′′ )0(
22)0( xtxt
x

Laboratorio di Calcolo B 14
Il metodo di Il metodo di RungeRunge--KuttaKuttaSe sostituiamo nell’espressione al secondo ordine di x(∆t) otteniamo:
Il valore della velocità nel punto ∆t/2 può essere ricavato calcolando la posizione al prim’ordine con il metodo di Eulero ed utilizzando l’equazione differenziale:
)(2
)0()( 3tOttxxtx ∆+∆
∆′+=∆
∆
∆=
∆′
∆′+=
∆
2,
22
2)0()0(
2ttxftx
txxtx

Laboratorio di Calcolo B 15
Il metodo di Il metodo di RungeRunge--KuttaKuttaRiassumendo possiamo dire che il metodo di Runge-Kutta di ordine due consiste nell’eseguire una estrapolazione del primo ordine da x(0) a x(∆t/2), nel valutare la derivata x’(∆t/2) e nell’utilizzarla per ottenere una stima di x(∆t) esatta al secondo ordine.Vediamo la sequenza di calcolo:
)()0()(2,2
)0(
)0),0((
32
12
1
tOkxtx
tkxftk
xftk
∆++=∆
∆
+∆=
∆=Calcolo della derivata nel punto iniziale
Estrapolazione al primo ordine in ∆t/2 e calcolo della derivata
Estrapolazione al secondo ordine in ∆t

Laboratorio di Calcolo B 16
RungeRunge--KuttaKutta di ordine quattrodi ordine quattroEsiste un metodo di Runge-Kutta esatto al quart’ordine, del quale riportiamo solo la sequenza di calcolo, ma che è sempre conveniente usare:
)(6336
)0()(
),)0((2,
2)0(
2,
2)0(
)0),0((
54321
34
23
12
1
tOkkkkxtx
tkxftk
tkxftk
tkxftk
xftk
∆+++++=∆
∆+∆=
∆
+∆=
∆
+∆=
∆=

Laboratorio di Calcolo B 17
Soluzione di equazioni Soluzione di equazioni differenziali: riassuntodifferenziali: riassunto
x(0)
È nota la posizione iniziale (condizioni al contorno)

Laboratorio di Calcolo B 18
Soluzione di equazioni Soluzione di equazioni differenziali: riassuntodifferenziali: riassunto
x(0)Si usa l’equazione differenziale per calcolare la derivata prima nel punto iniziale
x’(0) = f(x(0),0)

Laboratorio di Calcolo B 19
Soluzione di equazioni Soluzione di equazioni differenziali: riassuntodifferenziali: riassunto
x(0) Si assume che la derivata prima resti costante, e si calcola lo spostamento nell’intervallo ∆t (al primo ordine)
x’(0)
x(∆t) = x(0) + x’(0)∆t
Laboratorio di Calcolo B 20
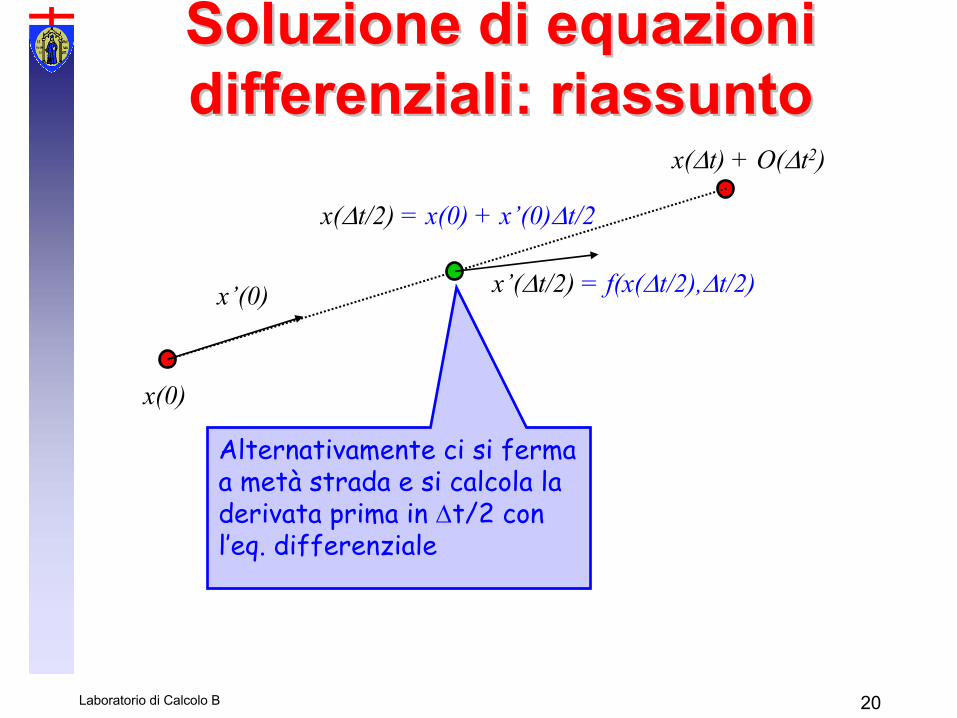
Soluzione di equazioni Soluzione di equazioni differenziali: riassuntodifferenziali: riassunto
x(0)
Alternativamente ci si ferma a metà strada e si calcola la derivata prima in ∆t/2 con l’eq. differenziale
x’(0)
x(∆t) + O(∆t2)
x(∆t/2) = x(0) + x’(0)∆t/2
x’(∆t/2) = f(x(∆t/2),∆t/2)

Laboratorio di Calcolo B 21
Soluzione di equazioni Soluzione di equazioni differenziali: riassuntodifferenziali: riassunto
x(0)
Sfruttando il fatto che
possiamo ricavare il valore della derivata seconda nel punto iniziale e quindi determinare la posizione a ∆t al secondo ordine
x’(0)
x(∆t) + O(∆t2)
x(∆t/2)
x’(∆t/2)
( )[ ])0(2/)/2()0( xtxtx ′−∆′∆=′′
x(∆t) = x(0) + x’(0)∆t + x’’(0)∆t2/2 +O(∆t3)

Laboratorio di Calcolo B 22
Sistemi di equazioni Sistemi di equazioni differenzialidifferenziali
Ci sono tre motivi per cui ci dobbiamo occupare di sistemi di equazioni differenziali e non di equazioni singole:
1) i problemi di dinamica del corpo rigido sono problemi vettoriali, per cui avremo tre equazioni per ciascuna delle componenti cartesiane;
2) i problemi interessanti da un punto di vista fisico coinvolgono più di un corpo, e quindi avremo tre equazioni vettoriali per ciascun corpo coinvolto;
3) l’equazione del moto è una equazione differenziale del secondo ordine, mentre noi abbiamo un metodo di soluzione per le equazioni del primo ordine.

Laboratorio di Calcolo B 23
Equazioni del secondo ordineEquazioni del secondo ordineUna equazione lineare del secondo ordine è del tipo:
Possiamo trasformare questa equazione in un sistema di due equazioni del primo ordine; basta porre
e si ottiene:
che è un sistema del primo ordine nelle variabili x(t) e v(t). Naturalmente, siccome ci sono due equazioni saranno necessarie due condizioni iniziali: x(0) e v(0).Il trucchetto funziona anche per gli ordini superiori.
( )ttxtxftctxtbtxtatx ),(),()()()()()()( ′=++′=′′
)()( tvtx =′
( )
=++=′=′
ttxtvftctxtbtvtatvtvtx
),(),()()()()()()()()(

Laboratorio di Calcolo B 24
Esercitazione in laboratorioEsercitazione in laboratorioIn laboratorio dovrete realizzare un programma per la soluzione di un generico problema del moto di N corpi in D dimensioni (con D = 1, 2 o 3). Questo programma potrà essere applicato a diversi problemi fisici interessanti.A scopo di esempio, e per verificare che tutto funzioni bene, la procedura di calcolo dovrà essere applicata al problema della determinazione, in due dimensioni, della traiettoria di un satellite attorno ad un pianeta assunto fermo.Dovrete anche realizzare il grafico della traiettoria del satellite.Nel seguito ci concentreremo nell’analisi dettagliata di questo problema, e specializzeremo un poco (ma non molto) la generica procedura valida per qualunque sistema di equazioni differenziali lineari.

Laboratorio di Calcolo B 25
Il calcolo della traiettoriaIl calcolo della traiettoriaIl problema che dobbiamo risolvere é:
che, come abbiamo visto, va riscritto nella forma:
Se abbiamo N corpi (i=1...N) e risolviamo il problema in tre dimensioni si tratta di un sistema di 2x3xN equazioni del primo ordine.Dobbiamo osservare che la quasi totalità dell’ interdipendenza tra le equazioni del sistema risiede nel termine di forza: la componente j-ma della forza che agisce sul punto i è funzione di tutte le componenti delle posizioni e delle velocità di tutti gli Ncorpi.
( )ttxtxtxtxFm
tx NNii
i ),(,),(),(,),(1)( 11r
Krr
Krrr ′′=′′
( )
=′
=′
ttxtxtvtvftv
tvtx
NNii
ii
),(,),(),(,),()(
)()(
11r
Krr
Krrr
rr

Laboratorio di Calcolo B 26
Soluzione del sistemaSoluzione del sistemaVisto che siamo capaci di risolvere una singola equazione differenziale, la soluzione di un sistema di molte equazioni non presenta particolari problemi. Di fatto il metodo che usiamo è rigidamente sequenziale, per cui si deve solo fare attenzione ad eseguire ogni passo del calcolo su tutte le equazioni prima di passare al passo successivo. Proviamo con il metodo di Runge-Kutta di ordine due.
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr

Laboratorio di Calcolo B 27
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 1Si calcola il valore
degli x’i(0)Banale: x’i(0) = vi(0)

Laboratorio di Calcolo B 28
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 2Si calcola il valore dei
v’i(0) usando l’equazione

Laboratorio di Calcolo B 29
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 3Si estrapolano xi e vi al primo ordine a ∆t/2 e si
calcola x’i(∆t/2)

Laboratorio di Calcolo B 30
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 4Si calcola v’i(∆t/2)

Laboratorio di Calcolo B 31
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 5Si calcola xi(∆t) al
secondo ordine in ∆t

Laboratorio di Calcolo B 32
Soluzione del sistemaSoluzione del sistema
)()0()()()0()(2,,
2)0(,,
2)0(
2)0(
)0),0(,,)0(),0(,),0(()0(
32
32
111
1112
12
1111
tOwvtvtOkxtx
tkxwvftwwvtk
xxvvftwvtk
iiiiii
iii
ii
NNiiii
∆++=∆∆++=∆
∆++∆=
+∆=
∆=∆=
rrrrrr
K
rr
Kr
rrrr
rr
rK
rrK
rrrrr
Passo 6Si calcola vi(∆t) al
secondo ordine in ∆t

Laboratorio di Calcolo B 33
Soluzione del sistemaSoluzione del sistemaIn conclusione, il calcolo della traiettoria di un sistema di N corpi in D dimensioni si riduce all’esecuzione iterativa di una sequenza di calcoli:
• La sequenza non dipende dallo specifico problema in esame, in quanto dipende solo dalla cinematica.
• La sequenza richiede il calcolo delle forze agenti su ogni corpo. Questa è la sola parte dove emergono le peculiarità della dinamica del sistema
• La sequenza va eseguita in parallelo su DxNequazioni. Di conseguenza è necessario manipolare vettori o matrici a DxN componenti.
Laboratorio di Calcolo B 34
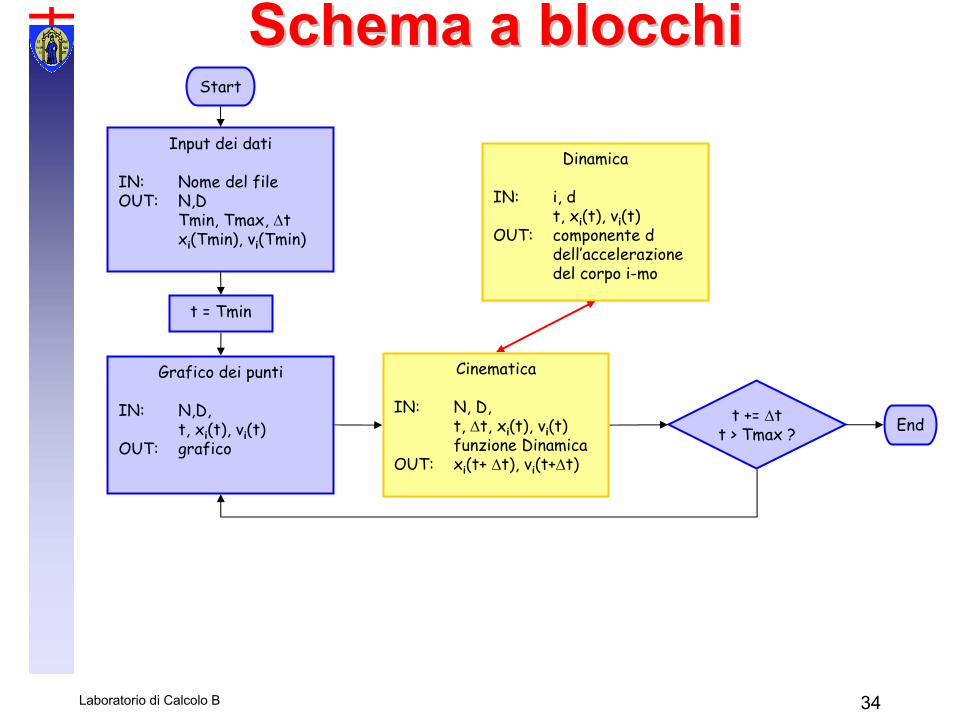
Schema a blocchiSchema a blocchi
Input dei dati
IN: Nome del fileOUT: N,D
Tmin, Tmax, ∆txi(Tmin), vi(Tmin)
Cinematica
IN: N, D,t, ∆t, xi(t), vi(t)funzione Dinamica
OUT: xi(t+ ∆t), vi(t+∆t)
Dinamica
IN: i, dt, xi(t), vi(t)
OUT: componente d dell’accelerazionedel corpo i-mo
Grafico dei punti
IN: N,D,t, xi(t), vi(t)
OUT: grafico
t += ∆tt > Tmax ? End
Start
t = Tmin

Laboratorio di Calcolo B 35
Manipolazione dei vettoriManipolazione dei vettoriIl programma deve manipolare vettori di DxNcomponenti; sia D che N possono variare, per cui è necessario allocare dinamicamente. Ci sono due soluzioni possibili:Soluzione 1: vettore di DxN componenti
Allocazionedouble *vect;vect = new double[N*D];
Loopint n,d;for (n=0; n<N; n++) {
for (d=0; d<D; d++) {vect[n*D + d] = ....
}}

Laboratorio di Calcolo B 36
Manipolazione dei vettoriManipolazione dei vettoriIl programma deve manipolare vettori di DxNcomponenti; sia D che N possono variare, per cui è necessario allocare dinamicamente. Ci sono due soluzioni possibili:Soluzione 2: matrice [N][D]
Allocazionedouble **vect;int n;vect = new double*[N];for (n=0; n<N; n++) {
vect[n] = new double[D];}
Loopint n,d;for (n=0; n<N; n++) {
for (d=0; d<D; d++) {vect[n] [d] = ....
}}

Laboratorio di Calcolo B 37
Manipolazione dei vettoriManipolazione dei vettori
vect[0]vect[1]vect[2]vect[3]vect[4]vect[5]vect[6]vect[7]vect[8]
Componenti x, y,zdel corpo 1
Componenti x, y,zdel corpo 2
Componenti x, y,zdel corpo 3
...
Soluzione 1: vettore di DxN componenti

Laboratorio di Calcolo B 38
Manipolazione dei vettoriManipolazione dei vettori
vect[0]vect[1]vect[2]vect[3]
vect[0][0]vect[0][1]vect[0][2]
Componenti x, y,zdel corpo 1
...
vect[1][0]vect[1][1]vect[1][2]
Componenti x, y,zdel corpo 2
vect[2][0]vect[2][1]vect[2][2]
Componenti x, y,zdel corpo 3
Soluzione 2: matrice [N][D]

Laboratorio di Calcolo B 39
Visualizzazione delle traiettorieVisualizzazione delle traiettoriePer visualizzare le traiettorie in due dimensioni si può utilizzare un oggetto di tipo TGraph:
TGraph(int n, double *x, double *y)che gia conoscete. Se ∆t è piccolo e la dimensione del marker pure (metodo SetMarkerSize) questa funzione disegna una linea continua lungo la traiettoria.Allo scopo di fare spettacolo, più che di capire il problema fisico, potete utilizzare il metodo
che consente lo spostamento dei punti, e quindi realizza una sorta di animazione del moto dei corpi lungo la traiettoria calcolata. Ricordate che, dopo la chiamata a SetPoint dovete chiamare il metodo Update di TCanvaso TPad per aggiornare il grafico. Se poi siete appassionati di effetti speciali potete creare un sistema di assi 3D con un oggetto di tipo TView e poi un grafico 3D con TPolyMarker3D.
SetPoint(int n, double *x, double *y)

Laboratorio di Calcolo B 40
Verifica della precisione di Verifica della precisione di calcolocalcolo
È chiaro, dalla trattazione generale sulla soluzione numerica delle equazioni differenziali, che la precisione è tanto migliore quanto più piccolo è ∆t. Il problema che si pone è quello di scegliere un valoresensato per l’incremento temporale.Una tecnica possibile consiste nel calcolare, ad ogni passo, l’energia totale del sistema. Tale energia dovrebbe rimanere costante. Se si individuano delle variazioni significa che la precisione è insufficiente (o che il sistema non è conservativo). In questo caso si può intervenire riducendo ∆t.

Laboratorio di Calcolo B 41
Schema a blocchi completoSchema a blocchi completo
Cinematica
IN: N, D,t, ∆t, xi(t), vi(t)funzione Dinamica
OUT: xi(t+ ∆t), vi(t+∆t)
Dinamica
IN: i, d, N, Dt, xi(t), vi(t)
OUT: componente d dell’accelerazionedel corpo i-mo
Grafico dei punti
IN: N,D,t, xi(t), vi(t)
OUT: grafico
t += ∆tt > Tmax ? End
Energia
IN: N, D∆t, t, xi(t), vi(t)
OUT: ∆t
Input dei dati
IN: Nome del fileOUT: N,D
Tmin, Tmax, ∆txi(Tmin), vi(Tmin)
Start
t = Tmin
Related Documents











