© ABB n.v. - 1 - Solutions to harmonic problems

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

©AB
B n.
v. -
1-
Solutions to harmonic problems

©AB
B n.
v. -
2-
Solutions to harmonic problems
n Structural modificationsn Isolate harmonic sensitive loads from harmonic producing
n Use high pulse number drive configurations
n Use special transformer couplings
à Often only possible in design phase of the installation
à Not always possible for all non-linear loads
à May turn out to be very expensive with high space requirement (life cycle assessment)

©AB
B n.
v. -
3-
Solutions to harmonic problems
n Passive filters: reactor and capacitor in seriesn Offers ‘low’ impedance path
for harmonic component(s)
à Filtering efficiency depends on network parameters, hence filtering performance cannot be guaranteed
à Danger for overloadingà Difficult to extendà Danger for resonanceà Multiple branches required for filtering more than one harmonicà Large space requirementà Provides always capacitive power
à AC drives do not require capacitive powerà Generators may not cope with leading power factor
Frequencyω0
Serie
s im
peda
nce
R
Capacitive behaviour
Inductivebehaviour

©AB
B n.
v. -
4-
Variable speed motors: DPF and PF
0 5 10 15 20 25 30 35 40 45 500
100
200
300
400
500
600
PF
DPF
TimeSec0 5 10 15 20 25 30 35 40 45 50
0
0.2
0.4
0.6
0.8
1
Example: Acceleration of a motor controlled by an AC drive
Displacement power factor Power factor
Active power

©AB
B n.
v. -
5-
Solution to harmonic problems
n Series passive and active devicesAttempt to prevent the harmonics from flowing by imposing high series impedance at the harmonic frequencies
à Device is in series with the load: high quality bypass requiredà Affects the supply voltage value of the loadà Needs to be sized for the load rating (fundamental + harmonics)à Difficult to extend to higher powersà May lead to very high voltage distortion (‘current has to flow’)
LoadSupply Series device
idistortion

©AB
B n.
v. -
6-
Solution to harmonic problems
n ‘Low pollution’ AC drives:
U1V1W1
U1V1W1
L1
L2
L3
Supply
DC linkDiode bridge
rectifier
V1 V3 V5
V2V6V4
C
L +
-
Ud
L1
L2
L3
InverterSupply
V1 V3 V5
V2V6V4
C
L +
-
Ud
IGBT bridge
Inputfilter
Lor
LCL
Inverter

©AB
B n.
v. -
7-
Low pollution drive application area
n Low pollution drives can be used to control AC motors
n Low pollution drives are not used for applications that do not require the control of AC motors, e.g.n In 4-wire office applications (‘PQFK’-application area)n Control of DC motors (very high installed base)n …
M 3
Motor

©AB
B n.
v. -
8-
Low pollution drive application area
n Good low pollution drives (ABB):
‘THDI(%) < 5% of nominal drive rating’à At lower than nominal rating THDI may be (is) higher
à Beware of ‘bad’ clean drivesE.g.: High frequency ripple destroys components of the istallation
Current
Voltage

©AB
B n.
v. -
9-
Low pollution drives: conclusions
n Good low pollution drives do a good job in having a low harmonicsignature at nominal load
n However:- They do not solve the problems of the complete installation
- They are expensive when applied to all the loads
n Therefore:- Use them possibly for single large loads
- Filter the rest of the installation with an active filter

©AB
B n.
v. -
10-
Active filters:
Supply Load
Harmonics injection
Proposed solutions to overcome poor PQ in LV
©AB
B n.
v. -
11-
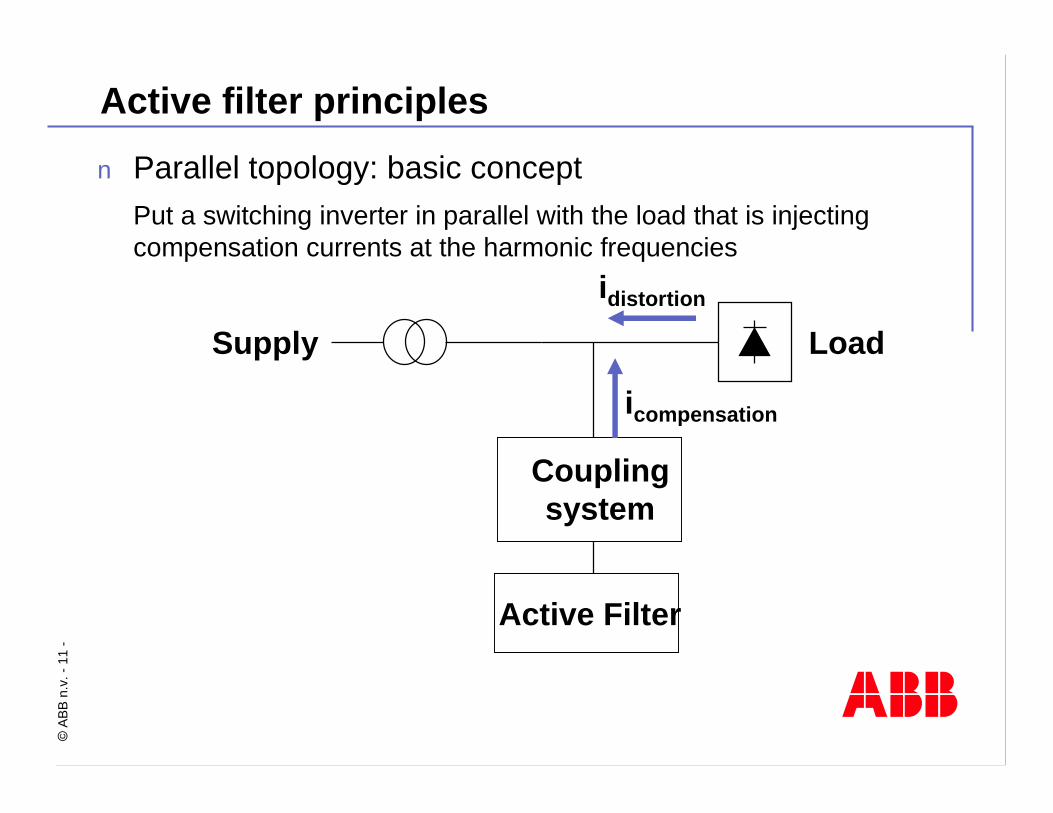
Active filter principles
n Parallel topology: basic conceptPut a switching inverter in parallel with the load that is injecting compensation currents at the harmonic frequencies
LoadSupply
Active Filter
idistortion
Couplingsystem
icompensation

©AB
B n.
v. -
12-
The ultimate solution to poor Power Quality
n ABB premium class Active Filters:
PQFK PQFM PQFI
Leading by excellence!
PQFS

©AB
B n.
v. -
13-
Modern Active Filter technology: Flexible answer to all problemsè Harmonic filtration up to high order
è Reactive power compensation
è Load imbalancecompensation
è Self-limiting
è Upgradeable
è Network monitor
è…PQF
-1 . 3
1 . 3
0 3 6 0
-1 .3
1 .3
0 3 60
-1 . 3
1 . 3
0 3 6 0
FeederFUNDAMENTAL ONLY
ONLY HARMONICS
The ultimate solution to poor Power Quality

©AB
B n.
v. -
14-
The ultimate solution to poor Power Quality
n ABB Active harmonic filtersn Filtering principle: cancellation of harmonics by equal and opposite
harmonic generation by an active filter device
-1 .3
1 .3
0 3 6 0
LOADCURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
-1. 3
1.3
0 36 0
ACTIVE FILTERCURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
-1 .3
1 .3
0 3 6 0
CLEANFEEDER
CURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
Wav
efor
ms
+=
Har
mon
ics

©AB
B n.
v. -
15-
How does an active filter work (1)
PWM Inverter (IGBT-based)
Line reactor
PWM reactor
Output filter
Control system

©AB
B n.
v. -
16-
How does an active filter work (2)?
Measurements
State of the art digital DSP system
PhysicalSignals
Power invertercontrol signals
• High filtering efficiency and reliability• Modern digital technology using multi-DSP systems and MicroController

©AB
B n.
v. -
17-
Highest ← PRIORITY → Lowest
Mode 1 Filtering to curve
Maximum filtering
Reactive compensation
Mode 2 Filtering to curve
Reactive compensation
Maximum filtering
Mode 3 Filtering to curve
Reactive compensation
Different modes of operation
Highest ← PRIORITY → Lowest
Mode 1 Filtering to curve
Maximum filtering
Reactive compensation
Mode 2 Filtering to curve
Reactive compensation
Maximum filtering
Mode 3 Filtering to curve
Reactive compensation
Reactive compensation: - none- dynamic (cosφ target)- static (constant Q)- Load balancing combined with reactive compensation

©AB
B n.
v. -
18-
n Best results up to high frequencies are obtained by usingclosed loop control systems
è Directly measure and controlharmonic current flowing to network
è Correction for system inaccuraciesè Can verify harmonics according to
regulation directlyè Can be used for power factor
targettingè Simple CT connection è Easy for future harmonic load
extensionsè Appropriate for local & global
compensation
Active filter control approaches
Distortionsource
ActiveActivefilterfilter
open loop
Active Active filterfilter
closed loop Distortionsource

©AB
B n.
v. -
19-
Active filter control approaches
Open loop systems:§ In open loop control, the sequence of commands in the program is
carried out irrespective of the consequences. For example, a teacher may set a class some work to do (the instructions) then leave the room.
Closed loop systems:§ In closed loop control, the teacher would set a class work to do,
then monitor their progress to make sure that it is done. If pupils stop working or misbehave then she would take action. The teacher observes the class, obtains feedback and takes appropriate action if the target is not being met.

©AB
B n.
v. -
20-
Open & Closed loop control: examplesOpen Loop systems§ Switch microwave on to defrost for 2 minutes. The turntable will turn
and the food be microwaved for 2 minutes irrespective of whether it is thoroughly defrosted or not.§ Program a toy robot to walk in a certain direction. It will follow all
instructions even if there is an obstacle in the way.§ Switch a sprinkler system on to water the garden at set times. The
garden will continue to be watered at these times even if it is pouring with rain.
Closed Loop systems§ Central heating systems § Ovensè A closed loop system is one that involves feedback to
ensure that set conditions are met

©AB
B n.
v. -
21-
n Open loop step responseè Transient responseè Steady state errorè Process may not run
n Closed loop step responseè Transient responseè No steady state errorè Process runs smoothly
Picture source: ‘Automatic Control Systems – B.C. Kuo’
Open and Closed loop response example

©AB
B n.
v. -
22-
LOADCURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
ACTIVE FILTERCURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
CLEANFEEDER
CURRENT
-2 0
0
2 0
4 0
1 5 7 1 1 1 3 1 7 1 9
+=
Active filter control approachesn Best results up to high frequencies are obtained by using
frequency domain control approach
è Dedicated optimizing controllers for each harmonic up to high order
è Individual harmonic selection capability for optimal use of resources
è In combination with closed loop control, allows to set up user requirementsfor each harmonic (e.g. standard targetting etc.)

©AB
B n.
v. -
23-
DVD Demonstration

Related Documents





![i .] APPROXIMATING HARMONIC FUNCTIONS 499€¦ · APPROXIMATING HARMONIC FUNCTIONS 499 THE APPROXIMATION OF HARMONIC FUNCTIONS BY HARMONIC POLYNOMIALS AND BY HARMONIC RATIONAL FUNCTIONS*](https://static.cupdf.com/doc/110x72/5f0873ba7e708231d42214c2/i-approximating-harmonic-functions-499-approximating-harmonic-functions-499-the.jpg)





