Solutions Manual to Accompany Differential Equations for Engineers and Scientists By Y. Cengel and W. Palm III Solutions to Problems in Chapter One © Solutions Manual Copyright 2012 The McGraw-Hill Companies. All rights reserved. No part of this manual may be displayed, reproduced, or distributed in any form or by any means without the written permission of the publisher or used beyond the limited distribution to teachers or educators permitted by McGraw-Hill for their individual course preparation. Any other reproduction or translation of this work is unlawful. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful. Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Solutions Manual to Accompany Differential Equations for Engineers and Scientists
By Y. Cengel and W. Palm III
Solutions to Problems in Chapter One
© Solutions Manual Copyright 2012 The McGraw-Hill Companies. All rights reserved. No part of this manual may be displayed, reproduced, or distributed in any form or by any means without the written permission of the publisher or used beyond the limited distribution to teachers or educators permitted by McGraw-Hill for their individual course preparation. Any other reproduction or translation of this work is unlawful. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
CHAPTER 1
Section Review Problems
1-1C Mathematical modeling of physical problems encountered in various fields of science and
engineering requires the application of physical principles and laws by representing the rate of
changes in the dependent variables as derivatives. Therefore the mathematical formulations of
such problems result in differential equations. Consequently, we often use differential equations
instead of algebraic in order to investigate a wide variety of problems in sciences and
engineering.
1-2C Mathematical modeling of physical problems involves two significant steps: (i) All
variables affecting the physical phenomena are identified, reasonable assumptions and
approximations are made, and interdependence of these variables is studied. (ii) The relevant
physical principles and laws are applied, and the problem is formulated mathematically, usually
in the form of a differential equation.
1-3C In order to obtain an accurate model in the form of a differential equation for a given
problem, we should have an adequate knowledge about the nature of the problem, the variables
involved, appropriate simplifying assumptions, and applicable physical laws and principles
involved, as well as a careful analysis.
1-4C The simplifying assumptions are often used to make the physical model easier to solve.
However, a model solution that is not quite consistent with the observed nature of the problem
indicates that that the mathematical model used is too crude. In such cases, a more realistic
model should be prepared by eliminating one or more of the questionable assumptions imposed
in the simplifying the problem.
1-5 Let be vertical position of the parachute varying with time . We take the upward direction
to be positive. Applying Newton’s second law in the -direction we obtain , where is
the net force acting on the parachute, is the total mass of the parachute, and is the local
acceleration of the parachute. Since the parachute cruises at a constant velocity, the net force on
it has to be zero, i.e.,
, where is the drag force by air on
the parachute. Therefore the desired differential equation
with an initial
condition of
1-6 The rate of change of money with a constant interest rate was found in Eq. (1-6) to be
. In this case, the person withdraws money from his account at a constant rate of at the
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
same time. Therefore we should modify the above equation to account for this withdrawal such
that
.
1-7C A variable is a quantity which may assume various values during a study. If its value
remains unchanged during a study, it is called a constant. A variable whose value can be changed
arbitrarily is called an independent variable. On the other hand, a variable whose value depends
on the values of other variables and thus cannot be varied independently is called dependent
variable. For example, the density ( ) of an ideal gas (e.g., air) depends on its absolute
temperature ( ), absolute pressure , and the gas constant ( ). Therefore we can express this
relation mathematically as , where dependent variable or function, and and
are independent variables or arguments.
1-8C A function of is said to be continuous at a number if (i) the function is defined at that
number, (ii) the limit exists, and (iii) this limit is equal to the values of the function
at . That is, a function is continuous at if . A function that does not meet
these three conditions is said to be discontinuous.
1-9C In mathematics, partial derivative term is used for multivariable functions which are
depend on two or more independent variables. Partial derivative of a function represents the
derivative of that function with respect to one of its independent variable while holding the
other variables constant. Ordinary derivative term, on the other hand, is used to describe the
derivative of a function, which depends on only one independent variable.
1-10C In general, th derivative of a function is denoted by , where is a positive integer
and called order of the derivative. For example is second order derivative of . The term
“order” should not be confused with the degree of a derivative, which is power of the highest
order of derivative. For example is the fourth degree of the first order derivative of .
1-11C Yes it is. In other words,
⁄. Set , then , hence
, and
.
1-12 (a) is a continuous function for all in . (b) Since is continuous on , has to be positive so that be defined. Therefore is continuous in .
(c) is continuous for all except . Therefore it is continuous on .
(d)
is continuous for all except , and since the function is
not defined for these values.
1-13 (a) Given:
Solution:
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
(b) Given:
Solution:
c) Given:
Solution:
d) Given: √
Solution:
√ ( √ ) ( √ )
√
( √ )
1-14 (a) Given:
Solution: ∫
(b) Given:
;
Solution: ∫
[ ]
1-15C The main difference between an algebraic equation and a differential equation is that a differential equation involves derivatives of the dependent variables. An algebraic equation, on the other hand, is simply a mathematical relation between dependent and independent variables. 1-16C A differential equation which involves only ordinary derivatives of one or more dependent variables with respect to a single independent variable is called an ordinary differential equation, whereas a differential equation which involves partial derivatives of one or more dependent variables with respect to one or more independent variables is called partial differential equations. 1-17C The order of highest derivative in a differential equation indicates the order of the differential equation. 1-18C A differential equation is said to be linear if the dependent variable and all of its derivatives are of the first degree, and their coefficients depend on the independent variable only.
1-19 (a) (Linear, constant coefficient) (b) (Nonlinear, variable coefficient) (c) (Linear, variable coefficient) (d) (Linear, variable coefficient) (e) , dividing both sides by we obtain
, which is a third order nonlinear nonhomogeneous differential equation with constant coefficient.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-20C In order to obtain a unique solution to a problem, more than just the differential equation is
required. We need to specify some conditions (such as value of the function or its derivatives at
some value of the independent variable) so that forcing the solution to satisfy these conditions at
specified points will result in a unique solution. These conditions are called boundary conditions if
they are specified at two or more values of the independent variable.
1-21C In order to obtain a unique solution to a problem, more than just the differential equation is
required. We need to specify some conditions (such as value of the function or its derivatives at
some value of the independent variable) so that forcing the solution to satisfy these conditions at
specified points will result in a unique solution. These conditions are called initial conditions if all of
them are specified at same values of the independent variable. A differential equation accompanied
by a set of initial conditions is called an initial value problem, whereas a differential equation
accompanied by a set of boundary conditions is called a boundary value problem. For example
, is an initial value problem since both conditions are specified at the
same value of . , , , on the other hand, is a boundary value
problem since both conditions are specified at different value of , and . It should be noted
that the differential equation remained the same while the type of problem was changed.
1-22 Given: , and Solution: The first and second derivatives of are
, and . Then we have .
Therefore is a solution of the differential equation.
The first and second derivatives of is , and
. Then we have .
Therefore is a solution of the differential equation
1-23 Given: , and Solution: The first derivative of are
. Then we have
. Therefore is a solution of the differential equation.
The first derivative of is . Then we have
. Therefore is a solution of the differential equation.
1-24 Given: , and Solution: The first and second derivatives of are
, and . Then we have
. Therefore is a solution of the differential equation.
The first and second derivatives of are , and
. Then we have
. Therefore is a solution of the differential equation
1-25 Given: , and Solution: The first and second derivatives of are
, and . Then we
have . Therefore is a solution of the
differential equation.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
The first and second derivatives of are , and
. Then we have
. Therefore is a solution of the
differential equation
1-26C Some of the linear differential equations, have a single term which involve derivatives, and no terms which involve the unknown function as a factor, can be solved by direct integration. 1-27C Since the order of the differential equation is three, there will be three arbitrary constant in the solution. 1-28 (a) can be solved by direct integration. The solution is , where is an arbitrary constant. (b) can be solved by direct integration. The solution is ∫ ∫
, where is an arbitrary constant.
(c) cannot be solved by direct integration since it involves the integral of the unknown function ∫ . (d) can be solved by direct integration by rewriting it as . The
solution is ∫ ∫
, where is an arbitrary constant.
(e) can be solved by direct integration by rewriting it as ( )
. The solution is ∫ ∫
, √ ,
where is an arbitrary constant. 1-29C No. Not all functions are integrable. For example, is not integrable in closed form in
terms of basic functions.
1-30C With symbolic processing, a computer program solves equations and returns the solution in
symbolic form; that is, as a formula.
1-31C No. For example, using direct integration, the resulting integral might not be integrable.
End-of-Chapter Problems
1.1. Differential Equations in Sciences and Engineering
1-32 An analyst often finds himself/herself in a position to make a choice between a very accurate
but complex model, and a simple but less accurate model. The right choice is usually the simplest
model, which yield adequate results. Construction of very accurate but complicated models are
often not so difficult, however such models are usually difficult to solve and not preferable. At the
minimum, the mathematical model should reflect the essential features of the physical problem that
it represents.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1.2. How the Differential Equations Arise?
1-33 Let be vertical position of the rock varying with time . We take the upward direction to be
positive. Applying Newton’s second law in the -direction we obtain , where is the net
force acting on the rock, is the mass of the rock, and is the local acceleration of the rock. Hence,
we write
, where is the drag force by air on the rock. The desired
differential equation becomes
with an initial condition of
1-34 Let be vertical position of the rock varying with time . We take the downward direction to
be positive. Applying Newton’s second law in the -direction we obtain , where is the
net force acting on the object, is the mass of the object, and is the local acceleration of the
object. The net force on the object is , where is the spring constant. By Newton’s law
of motion, we obtain
or
with an initial condition of .
1-35 The conservation of energy principle requires that the decrease in energy content of the metal
object during a time period of equals to the total heat transfer from the metal object surface to
the surrounding fluid during the same time interval. Therefore we write or
dividing by
. Taking the limit as yields
. This is the desired
differential equation since it describes the variation of temperature with time. The given initial
condition can be expressed mathematically as .
1-36 The rate of change of is given by
.
1-37 The rate of change of is given by
, . Note that decreases with time as
.
1.3. A Brief Review of Basic Concepts
1-38C An equation can involve more than one independent variable. For example, the velocity
field of a fluid depends in general both spatial coordinates and time . Therefore we can
express the velocity field mathematically ), where and are independent
variables, and is the dependent variables. Similarly, an equation can involve more than one
dependent variable. For example, the conservation of mass principle applied to an
incompressible two-dimensional steady flow can be given by
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
where and are the velocity component in the - and -directions, respectively. Since this is a
two-dimensional flow, the dependent variables and are a function of independent variables
and , that is and .
1-39C The first derivative of a function is represented by and gives the slope of the
function, that is the “rate” at which the function is changing. The second derivative , on the
other hand, gives the rate at which the slope ( ) is changing, and the point of inflection.
1-40C The derivative of a function gives the slope of the function, that is the “rate” at which the
function is changing. Since the tangent line is parallel to the -axis at , its slope has to be
zero.
1-41C The derivative of a function gives the slope of the function. For the present case, the
tangent line makes an angle of with the -axis at . Since , we can say that
the slope at the given point is .
1-42C The derivative of a function gives the slope of the function, that is the “rate” at which the
function is changing. Since the tangent line is perpendicular to the -axis at , its slope is
infinity.
1-43C By differentiating (
) (
) , and dividing both sides by we
obtain
(
)
(
)
For an equality between
and (
)
, it is evident from above equation that the second term in
the right hand side should be zero. This can be provided if (
) or
, or both are
zero.
1-44C For a given function ,
may or may not be a function of depending functional
nature of the function. Set , then
. The first derivative of the given function is
not a function .
1-45C The ideal gas relation is given. (a) By differentiating both sides we obtain
By realizing that along the constant lines we get
constant. This can be
possible only if constant lines in the - diagram are straight lines. (b) It is clear from
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
the larger pressures will yield larger
ratios. Since
is the slope of , we can
conclude that high pressure lines are steeper than the low pressure lines.
1-46C Integral can be regarded as the inverse process of differentiation. Integral is widely used
in solving differential equations since solving a differential equation is essentially a process of
removing the derivatives from the equation.
In Problems 1-47 and 1-48, we are to determine the interval in which the given function is continuous. 1-47 (a) is a continuous function on
(b) √ is defined on [ and continuous in that interval
(c)
is continuous for all except for
(d)
is continuous on { }, where denotes set of reel numbers
1-48 (a) is continuous on (b) is continuous on
(c)
is continuous for all except for
(d)
. The condition will make the function discontinuous. Therefore
the function is continuous on { } 1-49 Given: van der Waals equation of state
Solution: From the given equation
[ ] constant
1-50 (a) satisfies the given condition
(b)
satisfies the given condition
(c) No elementary function can satisfy the given condition.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel
©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-51 (a) satisfies the given condition
(b) satisfies the given condition (c) No elementary function can satisfy the given condition.
1-52 Given: Solution: Since and are independent variables both derivatives are equal to each other.
1-53 (a) Given:
Solution:
(b) Given:
Solution:
(c) Given:
Solution:
1-54 (a) Given:
Solution:
(b) Given:
Solution:
(c) Given:
Solution:
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
In Problems 1-55 and 1-56, we are to determine the derivative of the given function
1-55 (a) Given:
Solution:
(b) Given: (there is misprint in the problem statement)
Solution:
c) Given:
Solution:
d) Given:
Solution:
1-56 (a) Given:
Solution:
(b) Given:
Solution:
c) Given:
Solution:
( ( ) )
d) Given:
√
Solution:
√
√
√
√ (
)
In Problems 1-57 through 1-59, we are to perform the given integration
1-57 (a) Given:
Solution: ∫ [
]]
[ ]
(b) Given: Solution: ∫[ ] ∫ ∫ ∫
∫
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-58 (a) Given:
Solution: ∫ [
]
∫
∫ ∫
(b) Given:
Solution: ∫[ ] ∫ ∫ ∫
[
]
c) Given:
Solution: ∫[ ] ∫
∫
d) Given: Solution: ∫[ ] ∫ ⏟
[ ]
∫
[ ]
1-59 (a) Given: Solution: ∫[ ] ∫ ∫ ∫
(b) Given:
Solution: ∫ [
]
∫
∫
∫
[ ] [
]
[
]
[ ]
[ ]
(c) Given:
Solution: ∫ [ ]
∫
∫ ∫
∫
[
]
[
]
[ ]
[ ]
[ ]
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
(d) Given:
Solution: ∫ [
]
∫ ⏟ [ ]
∫ ∫
1.4. Classification of Differential Equations
1-60C A linear differential equation of order can be expressed in the most general form as
A linear differential equation is said to be homogeneous as well if . For example is a linear homogeneous differential equation. 1-61C A differential equation is said to have constant coefficients if the coefficients of all terms which involve dependent variable or its derivatives are constant. However, if any of the terms with the dependent variable or its derivatives involve the independent variables as a coefficient, that equation is said to have variable coefficients. For example is a linear nonhomogeneous differential equation with constant coefficients since the coefficients of and are constant. 1-62C A linear differential equation of order can be expressed in the most general form as
Therefore the given relation, , is a first order, linear, and nonhomogeneous ordinary differential equation with constant coefficient. In Problems 1-63 and 64, we are to determine the order of the differential equation below, whether it is linear or nonlinear, and whether it has constant or variable coefficients 1-63 (a) (Linear, constant coefficient) (b) (Linear, variable coefficient) (c) (Linear, variable coefficient)
(d)
(Linear, constant coefficient)
(e) (Nonlinear, variable coefficient)
1-64 (a) or
(Linear, constant coefficient)
(b) (Linear, variable coefficient) (c) (Linear, variable coefficient)
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
(d) , dividing both sides by we obtain , which is a second order linear nonhomogeneous differential equation with variable coefficient.
(e) (Nonlinear, variable coefficient)
1.5. Solution of Differential Equations
1-65C In algebra, we usually seek discrete values that satisfy an algebraic equation such as
. When dealing with the differential equations, however, we seek functions that satisfy
the equation in a specified interval. For example satisfies the algebraic equation .
But the differential equation is satisfied by the function for any value of .
1-66C Any function which satisfies a differential equation on an interval is called a solution of the
differential equation. A solution which involves one or more arbitrary constants represents a family
of functions, which satisfy the differential equation is called a general solution of the equation.
1-67C Any function which satisfies a differential equation and involves the unknown function and
the independent variables only (no derivatives) is a solution of the differential equation. If the
unknown function can be expressed in terms of independent variable only, then the solution is
called explicit; otherwise, the solution the solution is said to be implicit. For example
is an explicit solution. The solution , on the other hand, is an implicit solution
since unknown function in this case cannot be expressed in terms of only.
In Problems 1-68 through 1-78, we are to show that the given functions are solutions of the given
differential equation.
1-68 Given: , and Solution: The first and second derivatives of are
, and . Then we
have ⁄ . Therefore is a solution of the
differential equation.
The first and second derivatives of are , and
. Then we have
. Therefore is a solution of the differential
equation
1-69 Given: , and
Solution: The first and second derivatives of are , and
. Then
we have . Therefore is a solution of the differential equation.
The first and second derivatives of are , and
. Then we
have . Therefore is a solution of the differential equation.
1-70 Given: ,
and
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
Solution: The first and second derivatives of
are
, and
. Then we have
(
) (
) (
) . Therefore is a solution of the differential
equation.
The first and second derivatives of
are
, and
. Then we
have (
) (
) (
) . Therefore is a
solution of the differential equation
1-71 Given: , , and Solution: The first and second derivatives of are
, and . Then we have
. Therefore is a solution of the differential equation.
The first and second derivatives of are , and
. Then we have . Therefore is a solution of the differential equation. The first and second derivatives of are
, and . Then we
have . Therefore is a solution of the differential equation.
1-72 Given: ,
,
and
Solution: The first and second derivatives of
are
, and
. Then we have
(
) (
) (
) . Therefore is a solution of the differential
equation.
The first and second derivatives of
are
, and
. Then we
have (
) (
) (
) . Therefore is a solution
of the differential equation
Since
, the differential equation is already satisfied by .
1-73 Given: , , and Solution: The first and second derivatives of are
, . Then we have
. Therefore is a solution of the differential
equation.
The first and second derivatives of are ,
. Then we
have ( ) ( ) . Therefore is a solution of
the differential equation.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
The first and second derivatives of are ,
. Then we have
. Therefore is a solution of the differential
equation.
1-74 Given: , √ and [ (√ ) √ ]
Solution: The first and second derivatives of √ are [ (√ )
√ √ ] , [ (√ ) √ √ ] . Then we have
( [ (√ ) √ √ ]) ( [ (√ ) √ √ ])
( √ ) . Therefore is a solution of the differential equation.
After laborious manipulations, the first and second derivatives of [ (√ ) √ ]
are found as
[( √ ) (√ ) ( √ ) √ ]
[( √ ) (√ ) ( √ ) √ ]
Then we have
( [( √ ) (√ ) ( √ ) (√ )])
( [( √ ) (√ ) ( √ ) (√ )])
( [ (√ ) √ ])
Therefore is a solution of the differential equation. 1-75 Given: , , and Solution: The first and second derivatives of are
, and . Then we
have . Therefore is a solution of the differential equation.
The first and second derivatives of are , and
. Then we have . Therefore is a solution of the differential equation. The first and second derivatives of are
, and . Then we have
. Therefore is a solution of the differential equation 1-76 The differential equation for this problem was determined in Example 1-1 to be , where is vertical distance of the rock from the ground. The appropriate initial conditions for this problem will be and . 1-77 The parachute cruises at a constant velocity of . By realizing that the net force acting on it is zero, the differential equation for this problem is , where is vertical distance of the rock from the ground. The appropriate boundary conditions for this problem will be and .
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1.6. Solving Differential Equations by Direct Integration
1-78C Since the order of the differential equation is five, there will be five arbitrary constant in the solution. In Problems 1-79 through 1-81, we are to determine if the given differential equation can be solved by direct integration. We also are to obtain the general solution of those that can. 1-79 (a) can be solved by direct integration. The solution, by performing successive two integrals, is , where and are arbitrary constants. (b) cannot be solved by direct integration since it involves a single term with the unknown function ; ∫ .
(c) can be solved by direct integration. ∫ ∫
. Integrating one more time, we obtain ∫ ∫(
) or
, where and are arbitrary constants.
(d) cannot be solved by direct integration since it involves a single term with the unknown function ; ∫ .
(e) can be solved by direct integration by rewriting it as
.
The solution is ∫ ∫ , √ . It is not possible to obtain
the unknown function since the integral ∫√ cannot be found in terms of elementary functions.
1-80 (a) can be solved by direct integration. The solution, by performing successive three integrals, is
, where , and are arbitrary constants. (b) cannot be solved by direct integration since it involves the integral of the unknown function ∫ . (c) can be solved by direct integration. The solution, by performing
successive three integrals, is
, where , and are arbitrary
constants (d) By performing successive two integrals we are left with ,
where and are arbitrary constants. The resulting differential equation cannot be solved by direct integration since it involves the integral of the unknown function ∫ .
(e) can be solved by direct integration by rewriting it as
. The solution is ∫ ∫ , √ . However the required two more integrals are not so easy to perform. Maple gives the following results:
> f:=sqrt(C1-4*exp(-2*x));
> int(f,x);
> int(f,x,x);
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-81 (a) can be solved by direct integration. The solution is
, where is
an arbitrary constant. (b) cannot be solved by direct integration since it involves the integral of the unknown function ∫ . (c) can be solved by direct integration. By performing successive two
integrals, we are left , and
, where and
are arbitrary constants. (d) cannot be solved by direct integration since it involves a single term with the unknown function ; ∫ .
(e) can be solved by direct integration by rewriting it as
.
The solution is ∫ ∫ , √ . It is not possible to
obtain the unknown function since the integral ∫√ cannot be found in terms of elementary functions. 1.7. Introduction to Computer Methods
1-82C Suppose we have a differential equation model of a vibratory system and we need to
determine the period of the oscillations. We can determine this from a plot of the solution by
measuring the time between peaks.
1-83C The error is
It can be calculated and plotted in MATLAB as follows: x=[0:0.001:0.6]; y=((x-sin(x))./sin(x))*100; plot(x,y,x,5*ones(size(x))),grid, ylabel('Error (%)'),… xlabel('Theta (rad)'),ginput(1) The plot is shown below. The ginput function gives the result rad.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-84 The function can be plotted in MATLAB as follows: t=[0:1:300]; V=(6-0.0215*t).^2; plot(t,V),xlabel('Time (s)'),… ylabel('Volume, V (cups)'),ginput(1) The plot is shown below. The volume reaches zero at approximately s.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel
©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
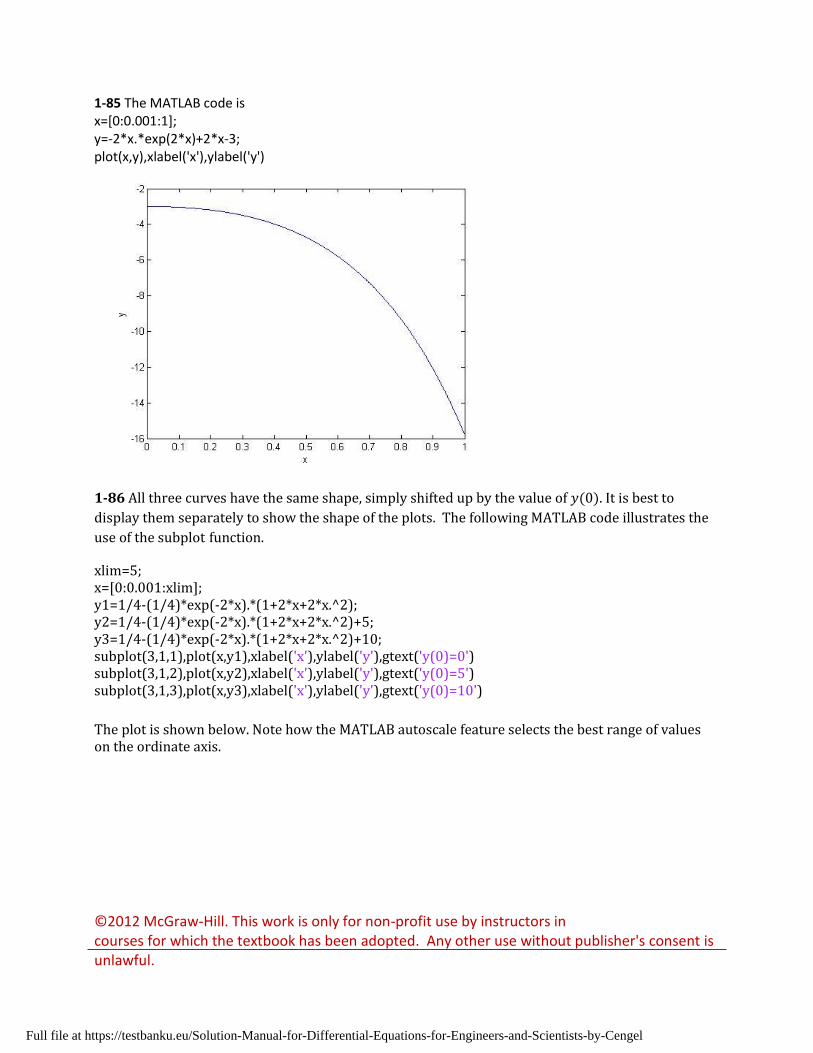
1-85 The MATLAB code is x=[0:0.001:1]; y=-2*x.*exp(2*x)+2*x-3; plot(x,y),xlabel('x'),ylabel('y')
1-86 All three curves have the same shape, simply shifted up by the value of . It is best to
display them separately to show the shape of the plots. The following MATLAB code illustrates the
use of the subplot function.
xlim=5; x=[0:0.001:xlim]; y1=1/4-(1/4)*exp(-2*x).*(1+2*x+2*x.^2); y2=1/4-(1/4)*exp(-2*x).*(1+2*x+2*x.^2)+5; y3=1/4-(1/4)*exp(-2*x).*(1+2*x+2*x.^2)+10; subplot(3,1,1),plot(x,y1),xlabel('x'),ylabel('y'),gtext('y(0)=0') subplot(3,1,2),plot(x,y2),xlabel('x'),ylabel('y'),gtext('y(0)=5') subplot(3,1,3),plot(x,y3),xlabel('x'),ylabel('y'),gtext('y(0)=10')
The plot is shown below. Note how the MATLAB autoscale feature selects the best range of values on the ordinate axis.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-87 We can compute the integral numerically using the MATLAB quad function as follows: sin_sq=@(x)sin(x.^2); I=quad(sin_sq,0,sqrt(2*pi)) The result is I = 0.4304. To evaluate the integral symbolically, we can use the MuPad as follows: int(sin(x^2),x=0..sqrt(2*PI)): float(%) The result is 0.4304077247.
1-88 We can compute the integral numerically using the MATLAB quad function as follows: integrand=@(x)sqrt(x.^4+5); I=quad(integrand,0,1) The result is I = 2.2796 . To evaluate the integral symbolically, we can use MuPad as follows: int(sqrt(x.^4+5),x=0..1): float(%) The result is 2.279625687.
1-89 Table 1-2 shows how to evaluate a definite integral. To evaluate an indefinite integral, modify
the commands given in Table 1-2 by deleting the limits 0, x or 0..x, but leaving the integration
variable x.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
(a) The answer is
[ ]
if , and
If .
(b) The answer is
1-90 Table 1-2 shows how to evaluate a definite integral. To evaluate an indefinite integral, modify
the commands given in Table 1-2 by deleting the limits 0, x or 0..x, but leaving the integration
variable x.
(a) The answer is
(b) The answer is
(c) The answer is
{[ ] } (d) The answer is
[ ] 1-91 Table 1-2 shows how to evaluate a definite integral. To evaluate an indefinite integral, modify
the commands given in Table 1-2 by deleting the limits 0, x or 0..x, but leaving the integration
variable x.
(a) The answer is
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
The symbolic processing programs often do not simplify their ansers, partly because it depends on
individual preferences. For, example, some would prefer the expression to
. Also, some
would prefer to combine the exponentials into a hyberbolic sine, as
(b) The answer is
[ ]
[ ]
Another form returned is
[ ]
(c) The answer is
[ ]
[ ]
(d) The answer is
Another form returned is
[ ]
1-92 If these problems can be solved by direct integration, the required integral will be an indefinite
integral, since no initial conditions are given. Table 1-2 shows how to evaluate a definite integral. To
evaluate an indefinite integral, modify the commands given in Table 1-2 by deleting the limits 0, or
0.. , but leaving the integration variable .
(a) Using direct integration,
∫ ∫
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
∫ ∫
The answer is
(b) Rearrange the equation as
This equation cannot be solved by direct integration since it is not possible to integrate the left side
without knowing . However, the more advanced methods of Chapter 5 give the solution in
terms of the special functions called Bessel’s functions.
(c) There is a misprint in the first printing of the text. The equation should be
This equation can be solved by direct integration as follows.
∫ ∫
Integrating one more time, we obtain
∫ ∫(
)
or
where and are arbitrary constants. (d) Rearrange the equation as
This equation cannot be solved by direct integration since it is not possible to integrate the left side
without knowing . However, the more advanced methods of Chapter 5 give the solution in
terms of the special functions called Airy’s functions.
(e) This equation can be solved partly by direct integration by rewriting it as
. The
solution is ∫ ∫ , √ . It is not possible to obtain the
unknown function in terms of elementary functions since the integral ∫√ cannot be found in terms of elementary functions.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-93 (a) The answer is
(b) Rearrange the equation as
This equation cannot be solved by direct integration since it is not possible to integrate the left side
without knowing . However, the more advanced computer methods of later chapters give the
following solution.
√
√
(√
)
√
(√
)
(c) Rearrange the equation as
∫ ∫
The answer is
(d) By performing successive two integrations we are left with , where and
are arbitrary constants. The resulting differential equation cannot be solved by direct integration
since it involves the integral of the unknown function ∫ . However, the more advanced computer
methods of later chapters give the following solution.
(e) The equation can be solved by direct integration by rewriting it as
The solution is
∫ ∫
√
However the required two more integrations are not so easy to perform. Maple gives the following
results:
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
> f:=sqrt(C1-4*exp(-2*x));
> int(f,x);
> int(f,x,x);
1-94 (a) Integrate both sides to obtain
∫ ∫
and
∫ ∫(
)
The answer is
These integrations can be easily performed with the standard symbolic programs.
(b) Rearrange the equation as
This equation cannot be solved by direct integration since it is not possible to integrate the left side
without knowing .
(c) Integrate both sides to obtain
∫ ∫
and
∫ ∫[ ]
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
The answer is
(d) Rearrange the equation as
This equation cannot be solved by direct integration since it is not possible to integrate the left side
without knowing .
(e) This equation can be solved by direct integration by rewriting it as
The solution is
∫ ∫
√
It is not possible to obtain the unknown function since the integral ∫√ cannot be found in terms of elementary functions. Review Problems In Problems 1-95 through 1-103, we are to determine the values of for which the given differential equation has a solution of the form 1-95 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since, , . Solving for gives and . (b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , Solving for gives .
(c) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since, , . Solving for gives and .
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
1-96 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these
derivatives in the given differential equation results in ( ) . Since,
, . Solving for gives and . (b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , Solving for gives .
(c) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these
derivatives in the given differential equation results in ( ) . Since,
, . Solving for gives and . 1-97 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives and . (b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , Solving for gives .
(c) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in
. Since , . Solving for gives
( √ ).
1-98 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives
(b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in
. Since , Solving for gives
( √ ).
(c) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in
. Since , . Solving for gives √ .
1-99 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives
(b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
derivatives in the given differential equation results in
. Since , Solving for gives
( √ ).
(c) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in
. Since , . Solving for gives ( √ )
1-100 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since ,
. Solving for gives
( √ )
(b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives .
1-101 (a) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since ,
. Solving for gives
( √ )
(b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since ,
. Solving for gives √ . 1-102 (a) Dividing both sides of the given equation by we get . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives
(b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since ,
. Solving for gives
( √ )
1-103 (a) Dividing both sides of the given equation by we get . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting these derivatives in the given differential equation results in . Since , . Solving for gives
√ (b) . The solution is in the form of . Taking the first and second derivatives of the proposed solution we obtain and . Substituting
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
these derivatives in the given differential equation results in . Since , . Solving for gives .
1-104 Given:
,
|
m/s, and .
Solution: Integrating the given differential equation twice we obtain
. By
inserting second initial condition,
Therefore we get
. The first initial condition, on the other hand, yields
|
,
then . Substituting the calculated values of and into the general solution, we obtain
. For seconds, the position of the rock will be
m.
1-105 Given:
, and
Solution: Since the parachute cruises at a constant velocity of , we can write
| .
Integrating the differential equation we obtain . The boundary condition requires that . Substituting into the general solution, we obtain . Since m at , m/s.
1-106 Given:
(
)
with
|
(due to thermal symmetry), and .
Solution: The differential equation can be arranged to give
(
)
Integrating the differential equation once we obtain
Thermal symmetry about the midpoint of the spherical body requires that
|
Therefore the differential equation takes the form
Integrating the differential equation one more time we obtain
Introducing the boundary condition yields
Substituting the calculated into the general solution of the differential equation we obtain
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
The temperature at the center is calculated to be
1-107 Given:
(
)
with
|
(due to thermal symmetry), and .
Solution: Multiplying both sides of the differential equation by and rearranging gives
(
)
Integrating the differential equation once we obtain
Thermal symmetry about the centerline of the spherical body requires that
|
Therefore the differential equation takes the form
Integrating the differential equation one more time we obtain
Introducing the boundary condition yields
Substituting into the general solution of the differential equation we obtain
Which is the desired solution for the temperature distribution in the wire as a function of . The temperature at the center is calculated to be
1-108 Given:
with BCs and
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
Solution: This is a second order linear homogeneous differential equation whose general solution can be obtained by direct integration twice such that
Applying the boundary conditions gives BC at
BC at
Substituting and into the general solution, the variation of temperature is determined to be
Maple solution: > restart: > with(DEtools): > T1:=80:T2:=10:L:=0.2: > ode := diff(T(x), x, x) = 0: > bcs := T(0) = T1, T(L) = T2: > dsolve({bcs, ode});
1-109 Given:
with
|
, and .
Solution: Rearranging the differential equation and integrating
where Integrating one more time
Applying the boundary conditions:
B.C. at
B.C. at
Substituting the and relations into the general solution of the differential equation give
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
which is the desired solution for the differential equation. The temperature at the insulated surface is then
Therefore the temperature at the insulated surface is . This problem can also be solved with Maple as follows: Maple solution > restart; > with(DEtools); > p := 0.2e-1; k := 30; To := 30; g := 7*10^4; L := .5: > ode := diff(T(x), x, x) = -g*exp(p*x)/k: > bcs := T(L) = To, (D(T))(0) = 0: > dsolve({bcs, ode}): > TEMP := unapply(dsolve({bcs, ode}), x); > evalf(TEMP(0));
1-110 (a) With ,
Thus
And
Thus
(b) Since
we have
∫
∫
Thus
]
and
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel

©2012 McGraw-Hill. This work is only for non-profit use by instructors in courses for which the textbook has been adopted. Any other use without publisher's consent is unlawful.
(c)
1-111 (a) With ,
Thus
and
and
Thus
and
√
√
(b) Since
we have
∫
∫
Thus
]
So
and
√
which is the desired result.
Full file at https://testbanku.eu/Solution-Manual-for-Differential-Equations-for-Engineers-and-Scientists-by-Cengel
Related Documents