SoftMoW: A Dynamic and Scalable Software Defined Architecture for Cellular WANs
Jul 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


SoftMoW: A Dynamic and Scalable
Software Defined Architecture for Cellular
WANs Mehrdad Moradi† Li Erran Li⋆ Z. Morley Mao†
Bell Labs, Alcatel-Lucent⋆ University of
Michigan†
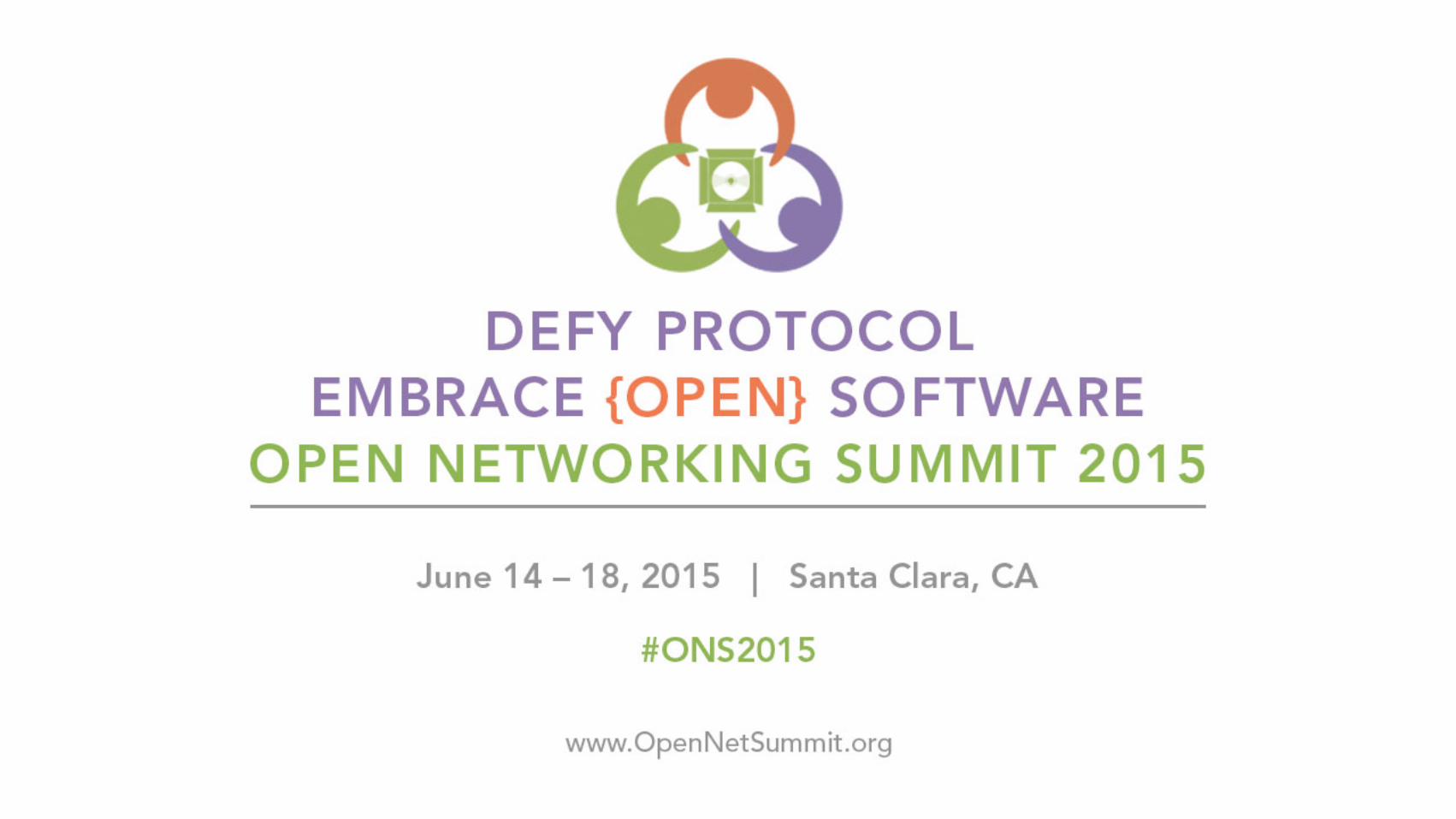
Current Mobile WANs • Organized into rigid and very large regions
• Minimal interactions among regions
• Centralized policy enforcement at PGWs
Two Regions 2
What about device-to-device?
Mobile WANs Problems • Suboptimal routing in large carriers
o Lack of sufficiently close PGW is a major cause of path inflation (Path Inflation,
[PAM’14])
• Lack of support for seamless inter-region mobility o Users crossing regions experience service interruption (DMM, Zuniga et.al., 2013)
• Scalability and reliability o The sheer amount of traffic and centralized policy enforcement
• Ill-suited to adapt to the rise of new applications o E.g., machine-to-machine (telehealth )
o All users’ outgoing traffic traverses a PGW to the Internet, even for reaching a user served by a close base station in a neighbor region
3

SoftMoW Motivation Question: How to make the packet core scalable, simple, and
flexible for tens of thousands of base stations and millions of
mobile users?
• Mobile networks should have fully connected core topology,
small logical regions, and more egress points
• Operators should leverage SDN to manage the whole network
with a logically-centralized controller: o Directs traffic through efficient network paths that might cross region boundaries
o Handles high amount of intra-region signaling load from mobile users
o Supports seamless inter-region mobility and optimizes its performance
o Performs network-wide application-based such as region optimization
4

SoftMoW Solution • Hierarchically builds up a network-wide control plane
o Lies in the family of recursive SDN designs (e.g. XBAR, ONS’13)
• In each level, abstracts both control and data planes and exposes a set of “dynamically-defined” logical components to the control plane of the level above. o Virtual Base stations (VBS), Gigantic Switches (GS), and Virtual Middleboxes (VMB)
5 Core Net
GS
Latency Matrix
Radio Net
VBS
Union of Coverage
Policy
VMB
Sum of capacitie
s

• New Dynamic Feature: In each level, the control logic
can modify its logical components for optimization
purposes o E.g., merge/spilt and move operations
6
SoftMoW Solution
GSW1
GSW2
GSW1
GSW2
VBS2
VBS3
VBS1
VBS1
VBS2
VBS3Move and Split
GSW1
GSW2
GSW3
Merge/Split

First Level-SoftMoW Architecture • Replace inflexible and expensive hardware devices (i.e., PGW, SGW) with
SDN switches
• Perform distributed policy enforcement using middle-box instances
• Partition the network into independent and dynamic logical regions
• A child controller manages the data plane of each regions
BS1BS2 BS3
BS5BS4 BS6
E1
E2 E3
E4
I1 MM
M M
M
MM
M
MM
Boundary
Child A
Agent ALocal Apps
Region A Region B
NIB
GS Rules &
ActionsEvents
1
2 3
54
6
7 8
9 10
Bootstrapping phase:
based on location and processing capabilities of
child controllers
7

Second Level-SoftMoW Architecture • A parent runs a global link discovery protocol
o Inter-region links are not detected by BDDP and LLDP
• A parent participates in the inter-domain routing protocol
• A parent builds virtual middlebox chains and egress-point policies, and dictates to GSs
M
2M
M
M
E4E3E2E1
Parent
I-Mobility Manager
Middlebox
Optimizer
Egress
SelectionRegion
Optimizer
I1
Internal
VBS1
Border
VBS1
Border
VBS2
Internal
VBS2
GS Protocol
-----
BGP
sessions
GSA GSBM
2M
M
M
NIB
BS1BS2 BS3
BS5BS4 BS6
E1
E2 E3
E4
I1 MM
M M
M
MM
M
MM
Boundary
Child A
Agent ALocal Apps
Region A Region B
NIB
GS Rules &
ActionsEvents
1
2 3
54
6
7 8
9 10
8

Hierarchical Traffic Engineering
BS1BS2 BS3
BS5BS4 BS6
E1
E2 E3
E4
I1 MM
M M
M
MM
M
MM
Boundary
Child A
Agent ALocal Apps
Region A Region B
NIB
GS Rules &
ActionsEvents
1
2 3
54
6
7 8
9 10
M
2M
M
M
E4E3E2E1
Parent
I-Mobility Manager
Middlebox
Optimizer
Egress
SelectionRegion
Optimizer
I1
Internal
VBS1
Border
VBS1
Border
VBS2
Internal
VBS2
GS Protocol
-----
BGP
sessions
GSA GSBM
2M
M
M
NIB
Latency (P1,E2)=300 Latency (P1,E4)=100
Web Voice GS Rules
9
• A parent pushes a global label into each traffic group
• Child controllers perform label swapping o Ingress point: pop the global label and push some local labels for intra-region paths
o Egress point: pop the local labels and push back the global label
Push W Pop W
Push W
Push W
Push W2 Push W1
Pop W2
Pop W
Pop W1

Time-of-day Handover Optimization E2
E1
Border
VBS1
GSA
M
3M
2M
M
E4E3
Border
VBS2
Internal
VBS2
GSBM
M M
GSA
Internal
VBS2
Border
VBS2
Internal
VBS1
Border
VBS1
1000300 2000Min Cut
Handover graph
10
BS1BS2 BS3
BS5BS4 BS6
E1
E2 E3
I1 MM
M M
M
MM
M
MM
Boundary
Region A Region B
Child B
1
2 3
54
6
7 8
9 10
Child A
New
Border
Old
Border
M
2M
M
M
E4E3E2E1
Parent
I1
Internal
VBS1
Border
VBS1
Border
VBS2
Internal
VBS2
GSA GSBM
2M
M
M
Q: How can an operator reduce inter-region handovers in peak hours?
Abstraction update
GS Rule: Move Border VBS1
coordination

Conclusion
SoftMoW:
• Brings both simplicity and scalability to the control
plane of very large cellular networks o decouples control and data planes at multiple levels ( focused only on
two levels here)
• Makes the deployment and design of network-wide
applications feasible o E.g., seamless inter-region mobility, time-of-day handover optimization,
region optimization, and traffic engineering
11

Questions!
12
Related Documents