SnoopyBot Team: Harsh Sharma Donny Yi

SnoopyBot Team: Harsh Sharma Donny Yi. Snoopy-Introduction A surveillance tank with web interface and a mounted webcam for live video feed Three different.
Dec 19, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

SnoopyBot
Team: Harsh Sharma Donny Yi

Snoopy-Introduction
A surveillance tank with web interface and a mounted webcam for live video feed
Three different modes of operation: Manual Route Capture Autonomous
Intruder detection

Snoopy-Applications
Security Home
Home users can access the website and watch the live video feed
Users can specify the routes for the robot to monitor in a house, if any new object/intruder is detected in the path, users will be notified
Public Places During closed hours, snoopy can monitor public places (i.e.
malls, secure locations) and alert the security if unusual activity is detected
Dangerous/Human Inaccessible Locations Snoopy can be used in manual mode to explore places not
suitable for humans

Snoopy-Performance Specifications
Major Components: Tankbot with DC motors HCS12 Microcontroller Ultra Sonic Range Finder (SRF-04) Infrared Motion Detector Sensor Two servo motors Cybiko Wireless Webcam with a built-in web server Wireless router And of course, a Personal Computer

Snoopy-Component Placement

Snoopy-Main Components details Webcam:Stream live video to the internet via built in
web server. Servomotors:Provide x and y axis movement to the
camera DC motors:Responsible for tank’s movement US range finder:Forward looking for
intruders/obstructions IR motion detection sensor:Intrusion detection Cybiko:Wireless communication between the tank and
the base station HCS12:Control the vehicle

Snoopy-Modes of Operation-Autonomous
Traverse pre-determined path while sensing for intruders
Upon sensing intruder, halt operation and alert the user
Provide live video feed at all timesValid moves are:Straight in unit
distances of 15 inches and right and left turns-restricted to 90 degrees

Snoopy-Autonomous Mode Operation

Snoopy-Autonomous Mode Operation(contd.)

Snoopy-Autonomous Mode Operation(contd.)

Snoopy-Modes Of Operation-Manual
The user has full control of vehicle and camera movement
Valid moves are:Straight in unit distances of 15 inches and right and left turns-restricted to 90 degrees
Provide live video feed at all timesIf obstruction is detected one unit
distance ahead, can’t move forward but turns are allowed

Snoopy-Modes Of Operation-Route Capture
The vehicle “learns” new routesMultiple routes can be storedRoute capture mode is an extension of
manual mode-every valid move made is captured in a “recipe”
Stores camera movements as well as vehicle movements

Snoopy-Implementation
Tank Movement:Facilitated by two independent DC motorsShaft-encoders ensure consistent operationMotors driven by HCS12 in conjunction with
H-bridgesCamera Movement:
Facilitated by two servomotors:one for x-coordinate and one for y-coordinate
Both servomotors controlled by the HCS12

Snoopy-Camera servo positions

Snoopy-Wireless communication
Serial Port communication
Custom development SDK
Built in wireless transceiver
High capacity NiMH 700 mAh rechargeable battery
It’s low-cost(CHEAP!!)

Snoopy-Range Finder
Ultrasonic range finder used for obstruction/intruder detection
placed in the front of the vehicle
Also responsible for detecting obstacles that can hinder the vehicle’s path
The sensor limit for detecting object is from 3cm to 3m

Snoopy-Range Finder

Snoopy-Range Finder
The input port or the ‘trigger’ input will be connected to port A (PA7) of the HCS12 board
A 100 us pulse needs to be applied to this port to activate the sensor
The output port of the sensor or echo port would be connected to port T (PT7) to perform pulse manipulation functions.

Snoopy-Beam Characteristic
o
o
8.74
41.375.8
5.6tan
21

Snoopy-Distance Timing

Snoopy-Motion Detection Sensor(MDS)
Once the vehicle is in a stationary position, the MDS is activated
if motion is detected by the MDS the system is notified
MDS is disabled/ignored until the MDS reaches its final position and has had enough time to come to a complete halt

Snoopy-H-Bridge Schematic

Snoopy-Overall System Interface

Snoopy-Overall System Flowchart
Web CommandEntered
Store CommandIn MYSQL
database in BS
BS applicationsends commandto Cybiko through
serial port.
BS-Cybikotransmits
command to V-Cybiko
V-Cybiko receivescommand
Command sentserially from V-Cybiko to HC12
HC12 ProcessesCommand
HC12 sends“cprocessed”
acknowledgementto V-Cybiko
V-Cybiko sendsacknowledgement
to BS-Cybiko
BS-Cybiko sendsacknowledgement
to BS serially
BS app markscommand as
processed in DB
BS ready for nextcommand

Snoopy High Level Components
Base Station Old Pentium Pro 200 Runs Debian Linux 3.0C++/Java for base station applicationRuns MYSQL and PHP serverRuns Apache to serve the GUI
Camera CommunicationWireless Router

Snoopy-High Level Components Cont.
MYSQL Store various routes and differentiates them with
unique route ID Each unique route consists of ordered sequence of
commands C++/Java
High Level language is used to bridge MYSQL to serial port as well as the overall logic of the system
PHP Used to produce dynamic web interface that ties
into the SQL database

Snoopy-GUI example

Snoopy-Web Interface Flowchart
Initial Page
Route Capture
Manual Mode
Choose RouteManual Mode
Execute
Delete/Add
Route Capture
Done
Execute
Choose Route
Add
Start/Restart/Pause
Done

Snoopy-Testing Strategy
Low level to high level component testing strategy Sensors-voltage characteristics, noise problems/filtering, power
consumption, testing under various environmental conditions Movement-reliable distance in varying power scenarios Wireless communication-reliable transmission and investigation of
interference problems Camera control-accurate and repeatable positions
Integration Ensure vehicle operates properly without wireless communication Integrate base station to vehicle communication Test high level to low level interface (PHP, SQL, C++ to com port of
the base station)

Snoopy-Power Consumption
Part Power Consumption Motors 160mW
68HC12 225 mW
US Sensor 200 mW
Camera 900ma * 5v = 4.5 watts
Motion Detector 200 mW
Phototransistor 100 mW
Total: 5.385 W
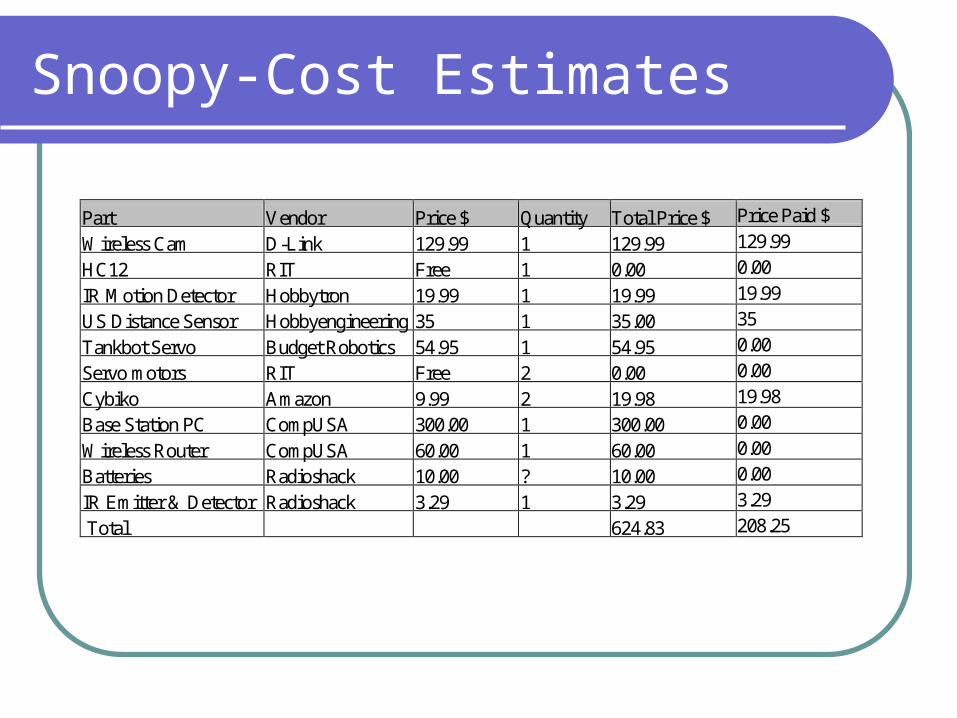
Snoopy-Cost Estimates
Part Vendor Price $ Quantity Total Price $ Price Paid $
Wireless Cam D-Link 129.99 1 129.99 129.99
HC12 RIT Free 1 0.00 0.00
IR Motion Detector Hobbytron 19.99 1 19.99 19.99
US Distance Sensor Hobbyengineering 35 1 35.00 35
Tankbot Servo Budget Robotics 54.95 1 54.95 0.00
Servo motors RIT Free 2 0.00 0.00
Cybiko Amazon 9.99 2 19.98 19.98
Base Station PC CompUSA 300.00 1 300.00 0.00
Wireless Router CompUSA 60.00 1 60.00 0.00
Batteries Radioshack 10.00 ? 10.00 0.00
IR Emitter & Detector Radioshack 3.29 1 3.29 3.29
Total 624.83 208.25

Snoopy-Timeline
ID Task Name Start Finish DurationDec 2004 Jan 2005
12/5 1/2 1/9 1/16 1/23 1/30
1 1d11/30/200411/30/2004Order All Parts
2 6d12/14/200412/7/2004Prepare Website
3 6d12/21/200412/14/2004GUI
4 14d1/7/200512/21/2004Assembly Code
5 6d1/14/20051/7/2005Integrate Project
6 18d2/8/20051/14/2005Testing
7 1d2/8/20052/8/2005Demo

Snoopy-Responsibilities
Harsh Sharma Sensor interface DC motor drive Servo motor
control Vehicle level
communication System Integration Testing
Donny Yi SQL database Serial interface Wireless
Communication Base Station
Configuration System Integration Testing

Thanks for your attention
Questions Comments Concerns?
Related Documents