Sistim komunikasi antar Sistim komunikasi antar robot dengan menggunakan robot dengan menggunakan wireless pada robot wireless pada robot swarm KRCI 2008 swarm KRCI 2008 Oleh: Oleh: Zainal Arif Zainal Arif 7105.030.017 7105.030.017 Pembimbing: Pembimbing: Akhmad Hendriawan ST

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Sistim komunikasi antar Sistim komunikasi antar robot dengan robot dengan
menggunakan wireless menggunakan wireless pada robot swarm KRCI pada robot swarm KRCI
20082008
Oleh:Oleh: Zainal Arif Zainal Arif
7105.030.0177105.030.017
Pembimbing:Pembimbing: Akhmad Hendriawan ST

Latar BelakangLatar Belakang

Latar BelakangLatar Belakang
SolusiSolusi
SolusiSolusi
PermasalahanPermasalahan
Bagaimana menentukan koordinasi posisi antar Bagaimana menentukan koordinasi posisi antar robot.robot.
Bagaimana robot mampu bekerja pada arena dengan Bagaimana robot mampu bekerja pada arena dengan bentuk ruangan yang berubah-ubah dengan berbagai bentuk ruangan yang berubah-ubah dengan berbagai halangan yang telah ditetapkan.halangan yang telah ditetapkan.
Bagaimana robot berkomunikasi dengan yang lain Bagaimana robot berkomunikasi dengan yang lain agar bisa menyelesaikan tugas dengan seefisien agar bisa menyelesaikan tugas dengan seefisien mungkin. mungkin.
Bagaimana menentukan konfigurasi hardware untuk Bagaimana menentukan konfigurasi hardware untuk mendukung komunikasi antar robot.mendukung komunikasi antar robot.
BATASAN MASALAHBATASAN MASALAH Robot hanya bekerja pada lapangan pertandingan dan sesuai Robot hanya bekerja pada lapangan pertandingan dan sesuai
dengan aturan Kontes Robot Cerdas Indonesia 2008 Divisi dengan aturan Kontes Robot Cerdas Indonesia 2008 Divisi Expert Expert Swarm.Swarm.
Jumlah robot sebanyak dua buah yang nantinya disebut robot A Jumlah robot sebanyak dua buah yang nantinya disebut robot A jika robot pertamakali berhasil menemukan bayi dan yang lain jika robot pertamakali berhasil menemukan bayi dan yang lain disebut robot B. disebut robot B.
Komunikasi yang terjadi antar robot adalah sbb:Komunikasi yang terjadi antar robot adalah sbb:– Koordinasi posisi start kedua robot.Koordinasi posisi start kedua robot.– Ada tidaknya lilin di suatu ruangan di lantai bawah.Ada tidaknya lilin di suatu ruangan di lantai bawah.– Pemberitahuan koordinasi terdekat dengan pintu tangga untuk naik Pemberitahuan koordinasi terdekat dengan pintu tangga untuk naik
ke lantai atas. ke lantai atas. – Pemberitahuan kepada robot B ketika robot A berhasil menemukan Pemberitahuan kepada robot B ketika robot A berhasil menemukan
bayi.bayi.– Pemberitahuan kepada robot B ruangan yang nantinya boleh di Pemberitahuan kepada robot B ruangan yang nantinya boleh di
masuki robot B di lantai atas.masuki robot B di lantai atas.– Pemberitahuan posisi pertemuan antar kedua robot ketika misi kedua Pemberitahuan posisi pertemuan antar kedua robot ketika misi kedua
robot selesai.robot selesai.
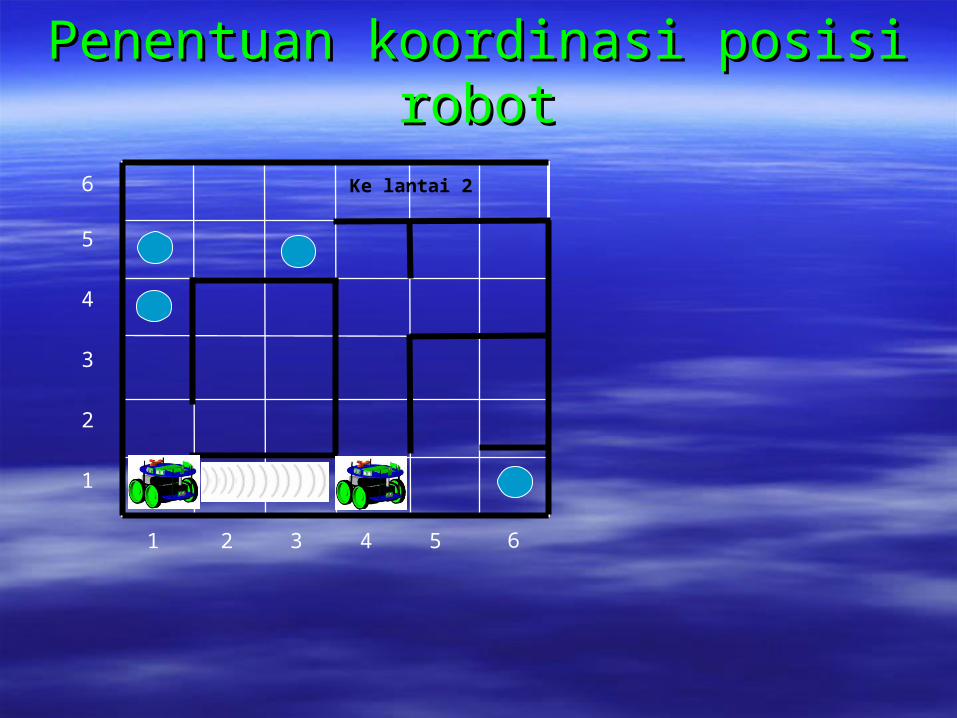
Penentuan koordinasi posisi robotPenentuan koordinasi posisi robot
Ke lantai 2
1 2 3 4 5 6
1
2
3
4
5
6
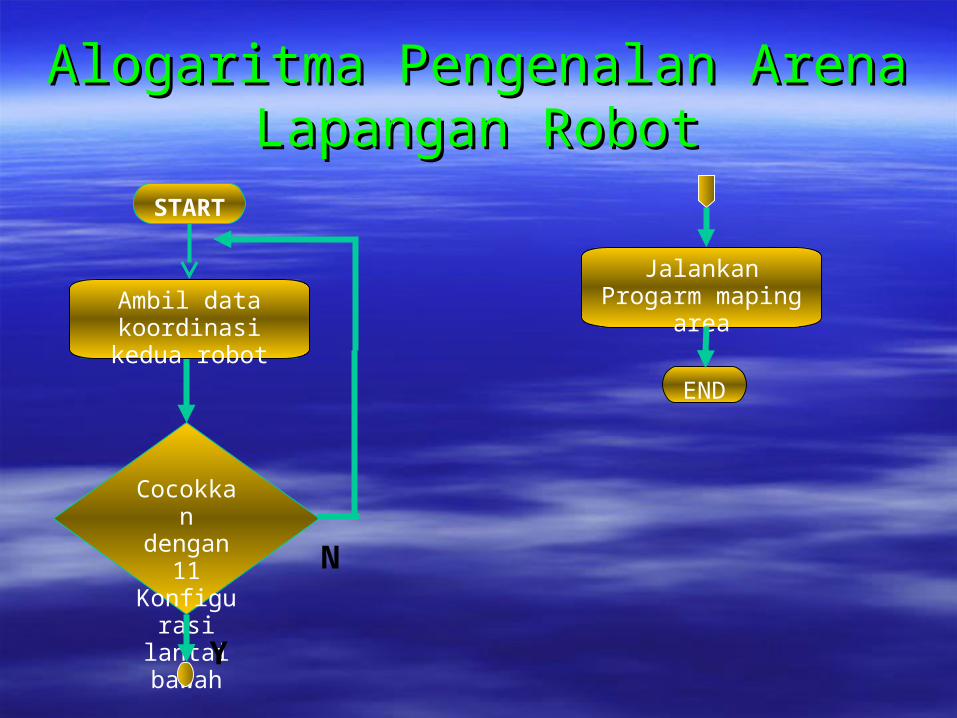
Alogaritma Pengenalan Arena Alogaritma Pengenalan Arena Lapangan RobotLapangan Robot
START
Cocokkan dengan 11 Konfiguras
i lantai bawah
N
Y
Ambil data koordinasi kedua
robot
Jalankan Progarm maping area
END
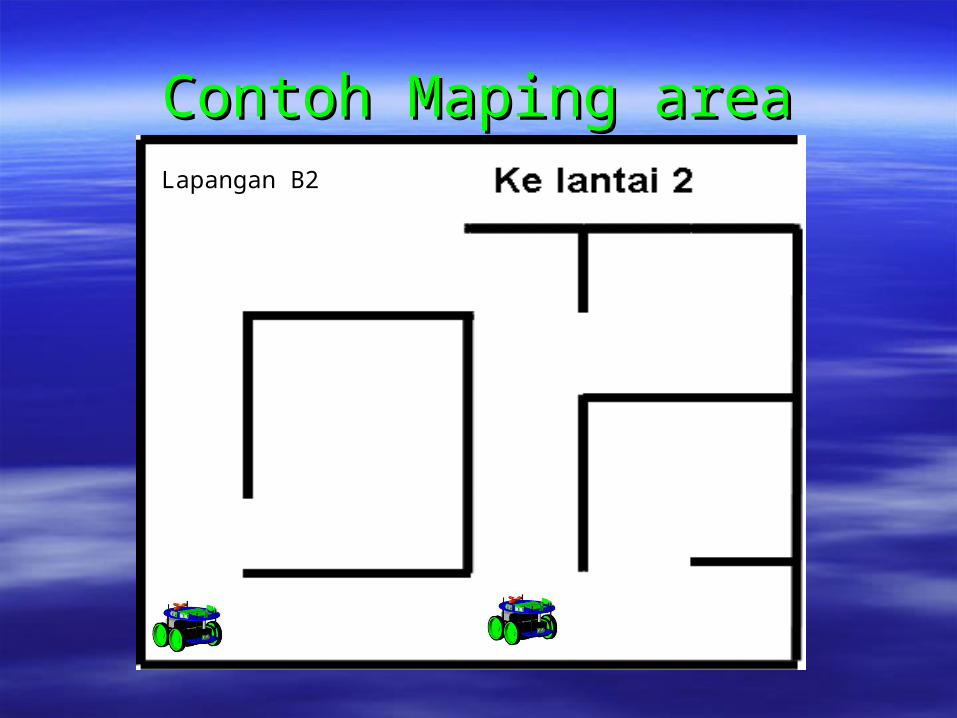
Contoh Maping areaContoh Maping areaLapangan B2

Ke lantai 2
1 2 3 4 5 6
1
2
34
5
6
PermasalahanPermasalahan
1.
Ke lantai 2
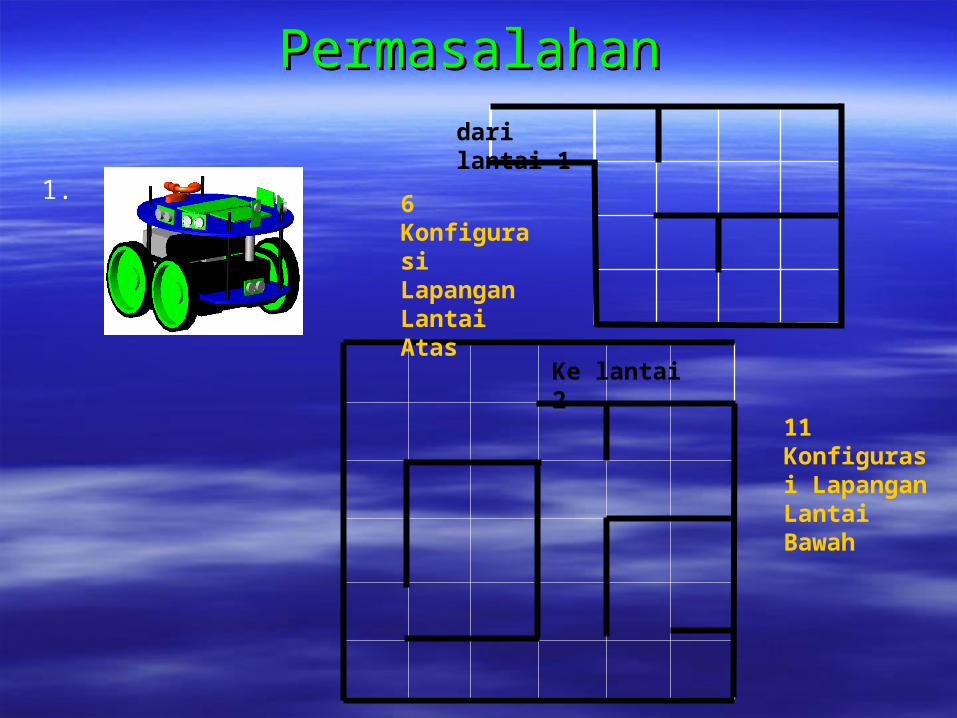
dari lantai 1
11 Konfigurasi Lapangan Lantai Bawah
6 Konfigurasi Lapangan Lantai Atas
PermasalahanPermasalahan
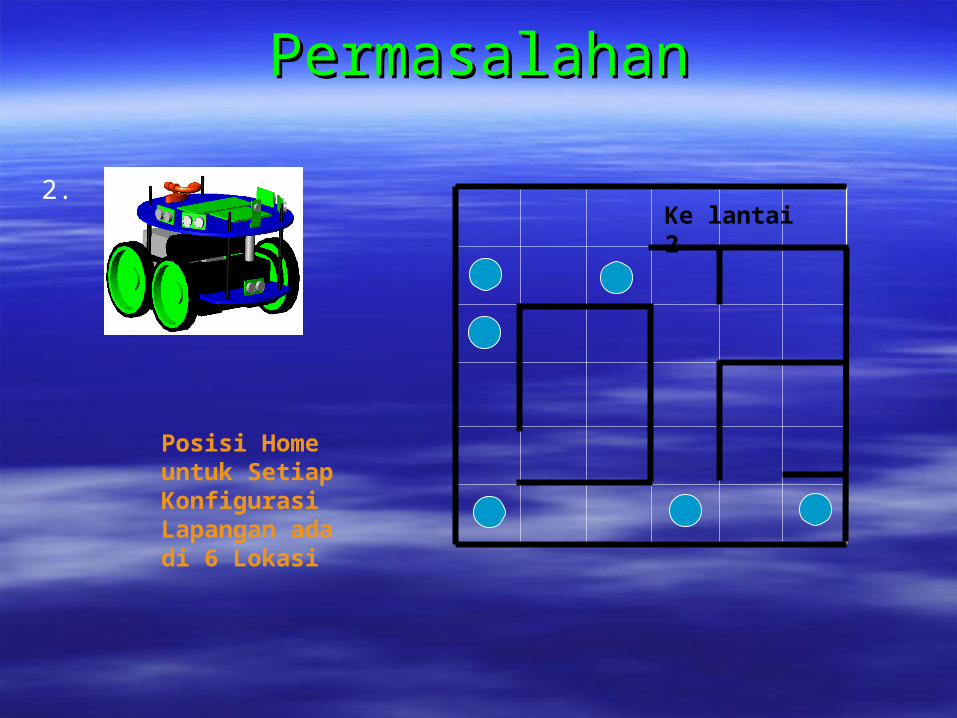
2.Ke lantai 2
Posisi Home untuk Setiap Konfigurasi Lapangan ada di 6 Lokasi
PermasalahanPermasalahan
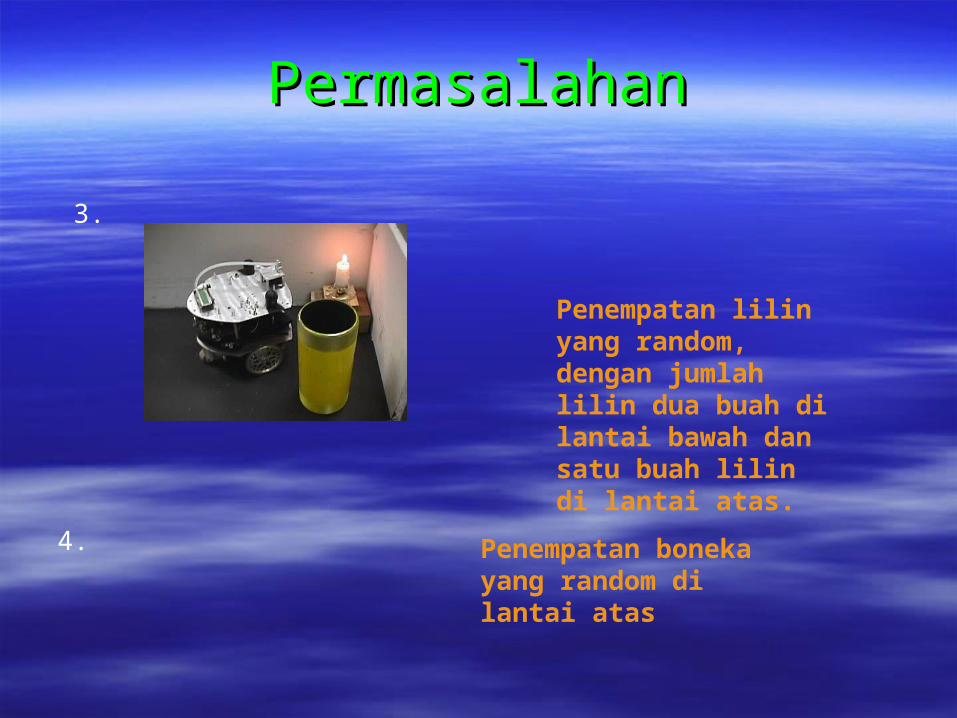
4.
Penempatan lilin yang random, dengan jumlah lilin dua buah di lantai bawah dan satu buah lilin di lantai atas.
Penempatan boneka yang random di lantai atas
3.
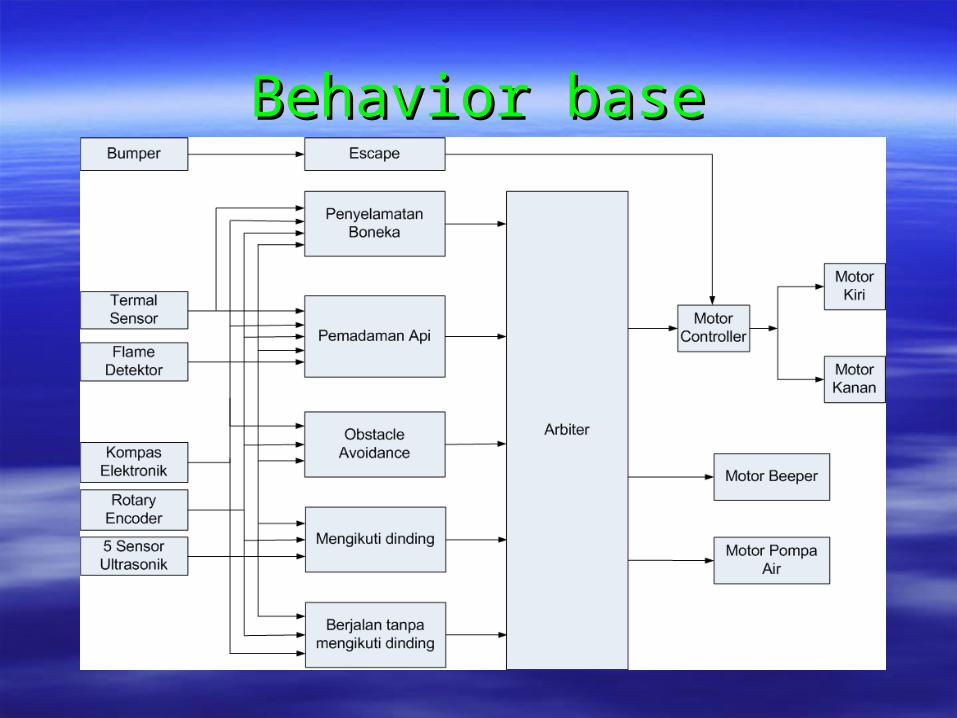
Behavior baseBehavior base

Terima KasihTerima Kasih
Related Documents