Sistema para análisis de movimiento a partir de sensores cinemáticos. A.F.Orozco, L.Peñuela, J.F.Cardona, J.D.Aljure, V.Gómez Centro de Bioingeniería. Grupo de Investigación en Bioingeniería.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Sistema para análisis de movimiento a partir de sensores cinemáticos.
A.F.Orozco, L.Peñuela, J.F.Cardona, J.D.Aljure,
V.Gómez
Centro de Bioingeniería.
Grupo de Investigación en Bioingeniería.
CONTENIDO
• Introducción. • Materiales y métodos. • Dispositivo desarrollado. • Algoritmo. • Resultados. • Conclusiones.
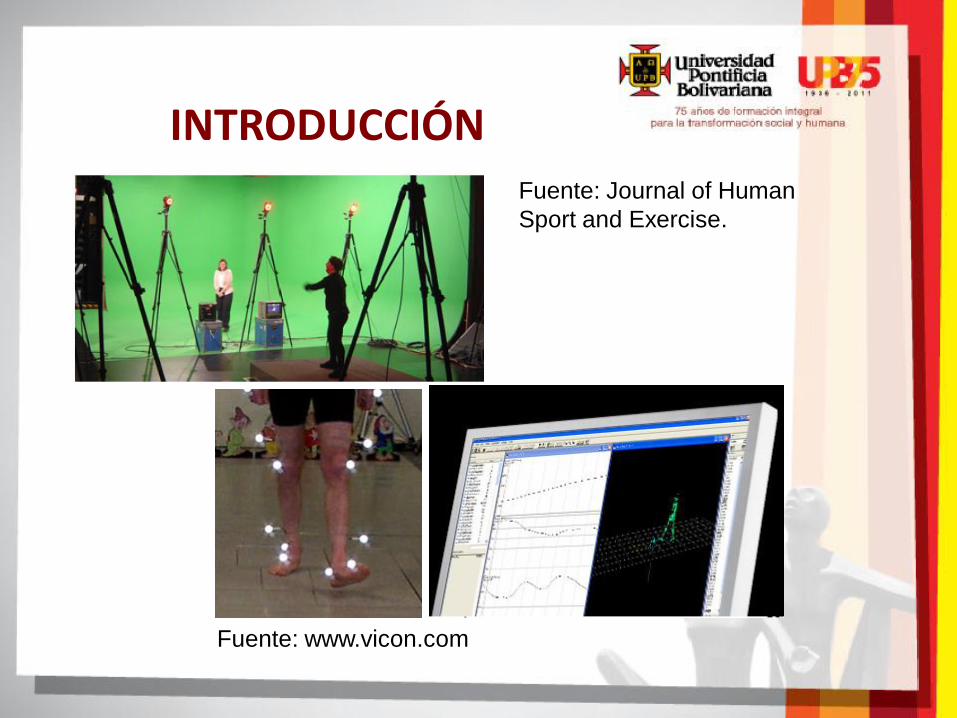
INTRODUCCIÓN Fuente: Journal of Human
Sport and Exercise.
Fuente: www.vicon.com

INTRODUCCIÓN
Fuente: Journal of Human Sport and Exercise.
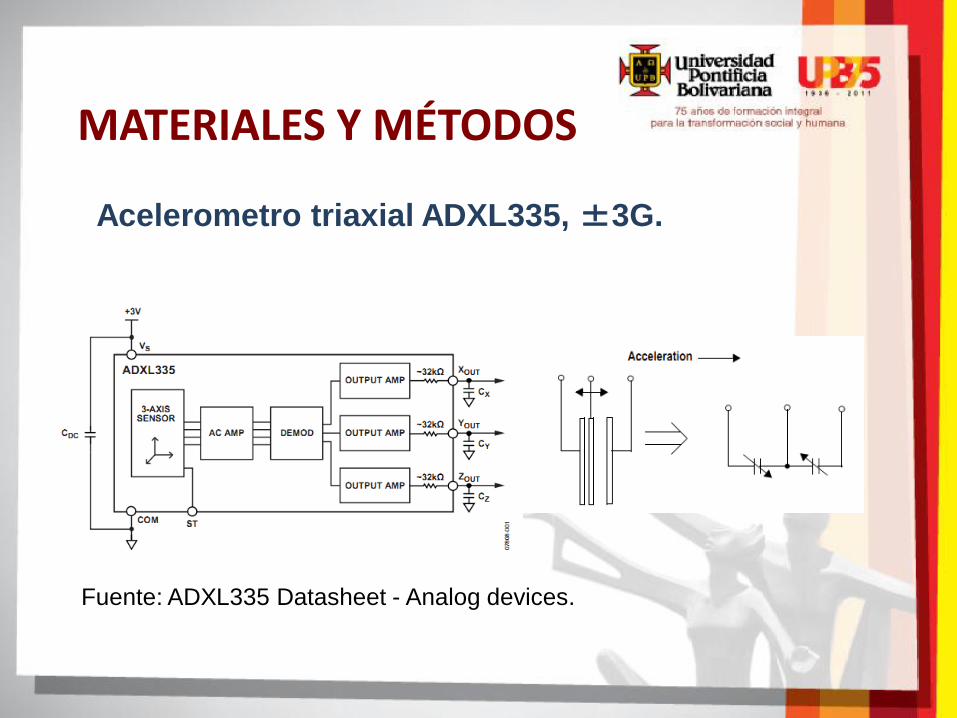
MATERIALES Y MÉTODOS
Acelerometro triaxial ADXL335, ±3G.
Fuente: ADXL335 Datasheet - Analog devices.
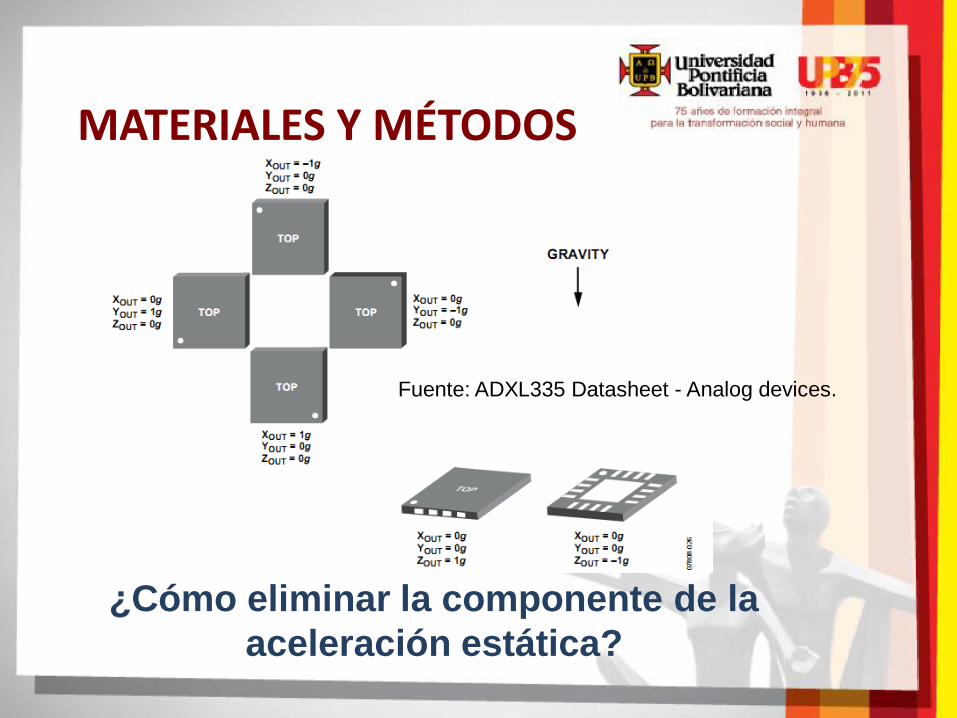
MATERIALES Y MÉTODOS
¿Cómo eliminar la componente de la
aceleración estática?
Fuente: ADXL335 Datasheet - Analog devices.
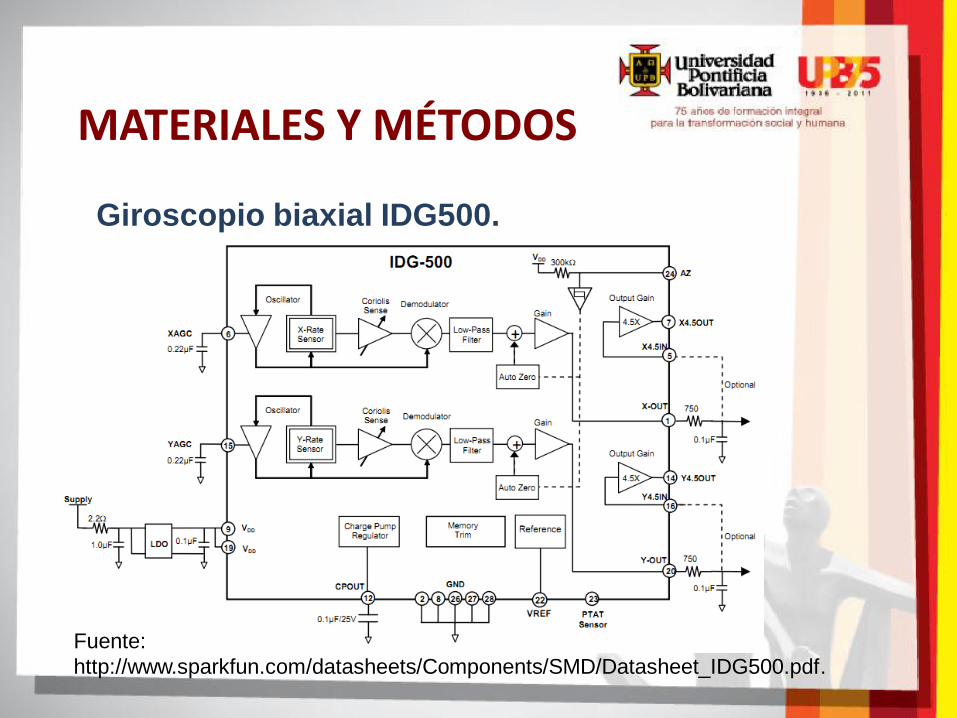
MATERIALES Y MÉTODOS
Giroscopio biaxial IDG500.
Fuente:
http://www.sparkfun.com/datasheets/Components/SMD/Datasheet_IDG500.pdf.
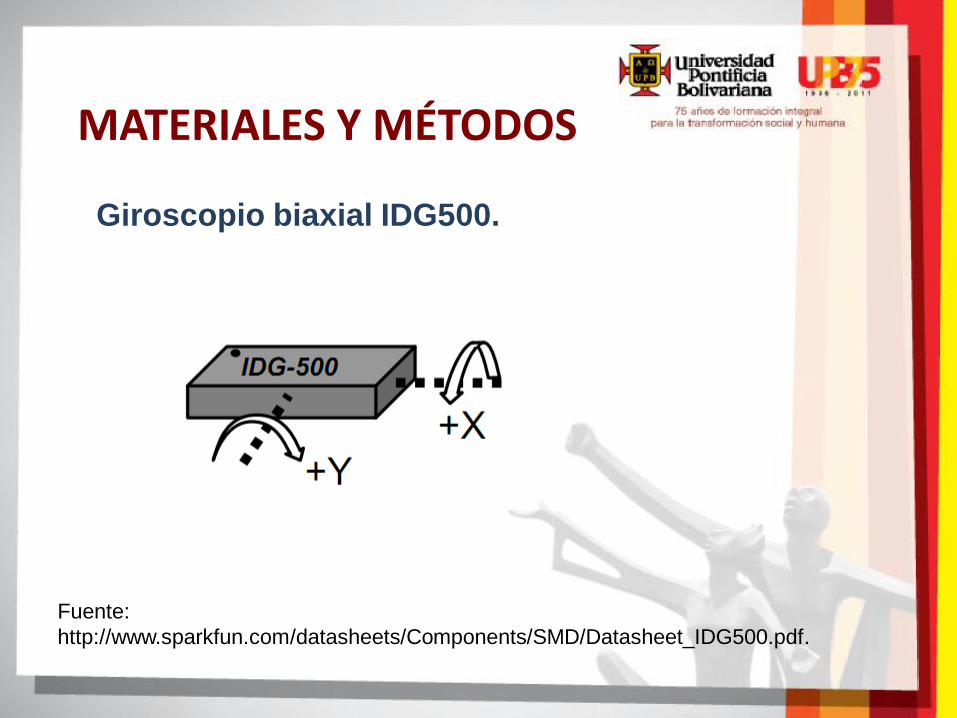
MATERIALES Y MÉTODOS
Giroscopio biaxial IDG500.
Fuente:
http://www.sparkfun.com/datasheets/Components/SMD/Datasheet_IDG500.pdf.

DISPOSITIVO DESARROLLADO
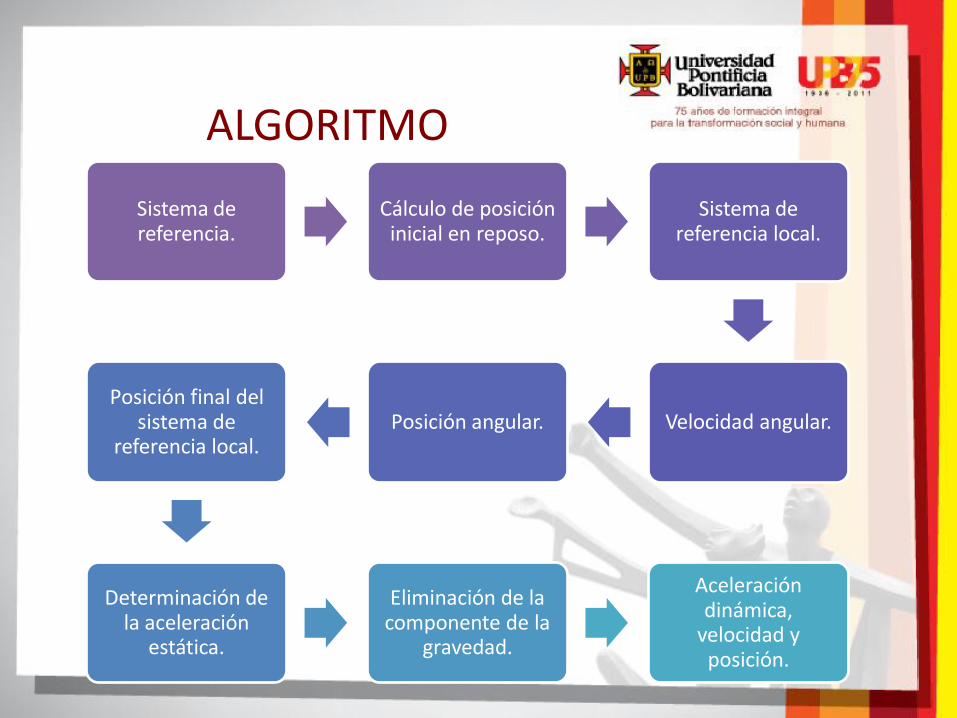
ALGORITMO
Sistema de referencia.
Cálculo de posición inicial en reposo.
Sistema de referencia local.
Velocidad angular. Posición angular. Posición final del
sistema de referencia local.
Determinación de la aceleración
estática.
Eliminación de la componente de la
gravedad.
Aceleración dinámica,
velocidad y posición.
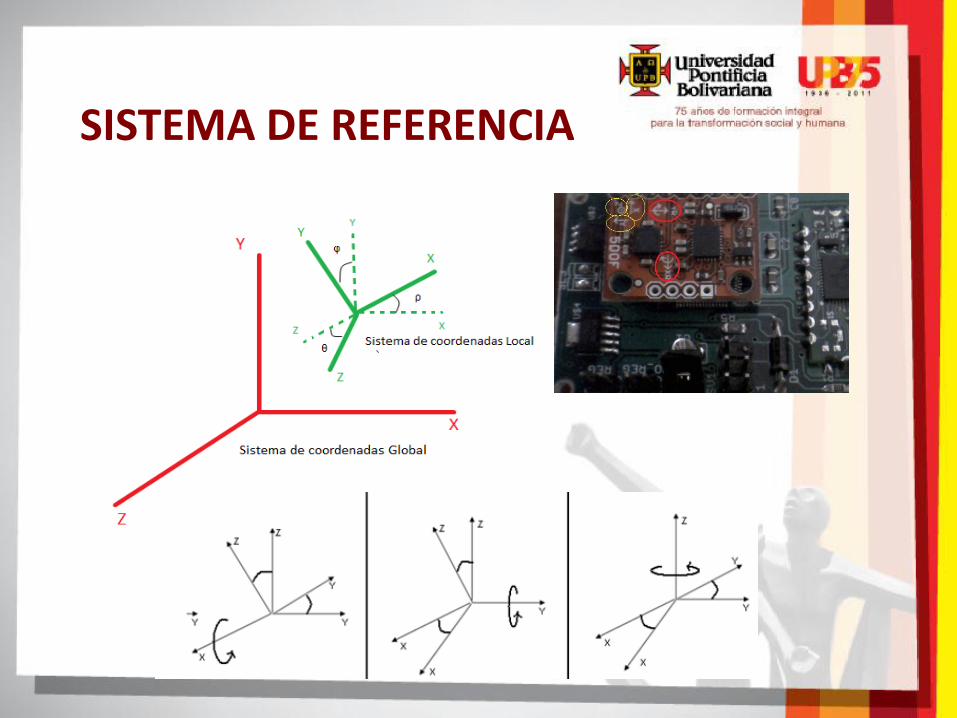
SISTEMA DE REFERENCIA
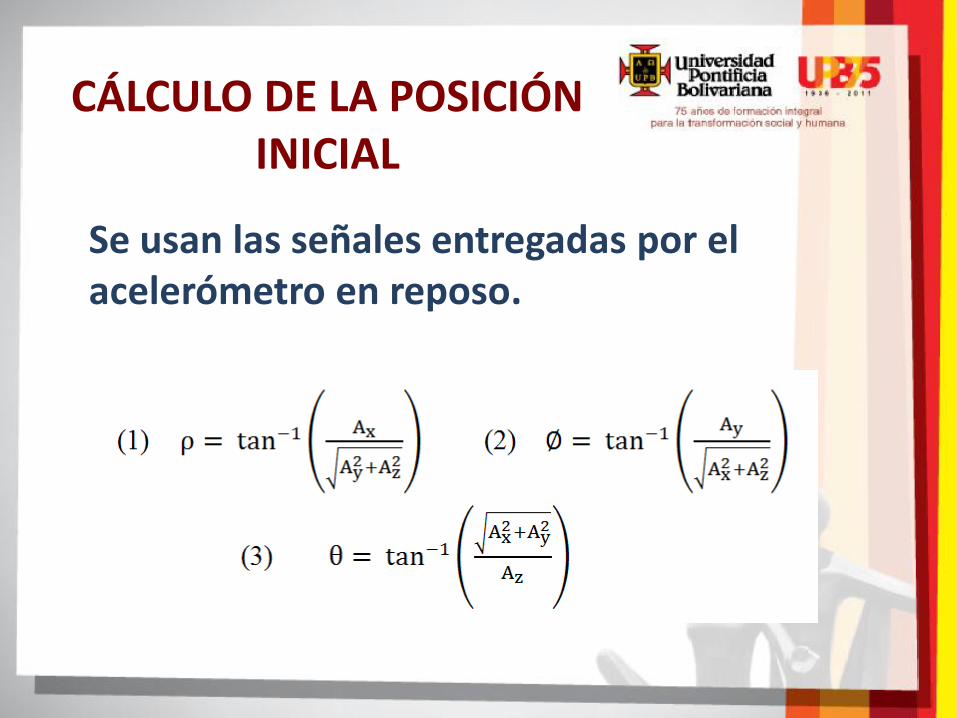
CÁLCULO DE LA POSICIÓN INICIAL
Se usan las señales entregadas por el acelerómetro en reposo.
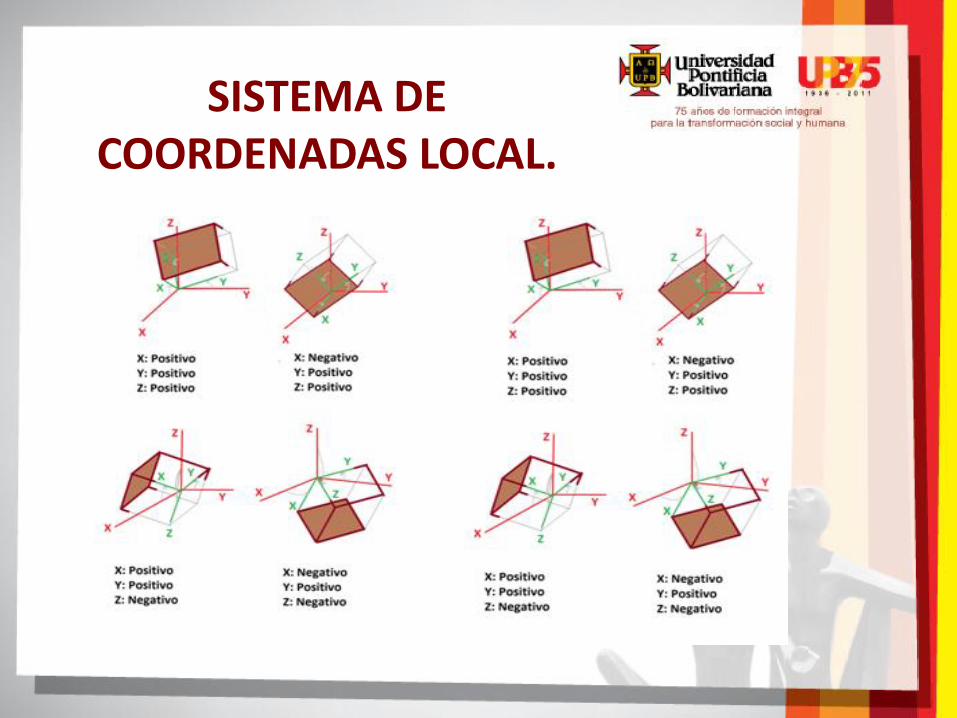
SISTEMA DE COORDENADAS LOCAL.
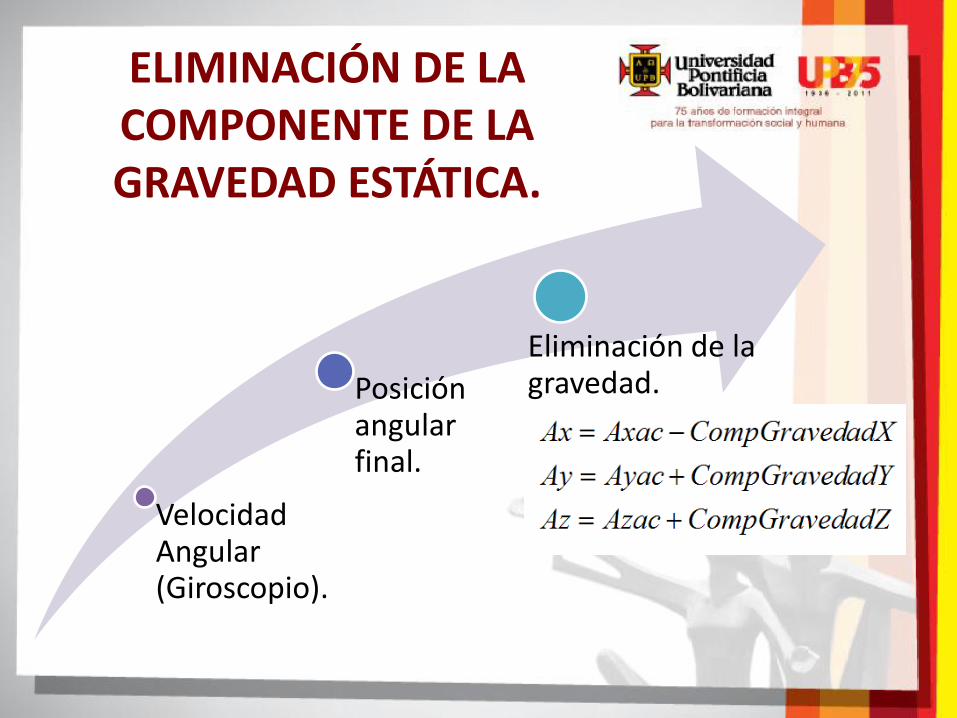
ELIMINACIÓN DE LA COMPONENTE DE LA GRAVEDAD ESTÁTICA.
Velocidad Angular (Giroscopio).
Posición angular final.
Eliminación de la gravedad.

RESULTADOS
Sistema de prueba
Medición de posición inicial
Variable Serie 1 Serie 2 Dato teórico
% error
Aceleración lineal (m/s²) 12.376 11.753 12.267 4.19
Frecuencia por
acelerómetros
(Hz)
1.123 1.133 1.078 5.10
Frecuencia por giroscopios
(Hz) 1.134 1.167 1.078 8.22
Datos de pruebas dinámicas
CONCLUSIONES • Para obtener la señal de aceleración lineal es necesario las
mediciones dadas por un acelerómetro triaxial y un giroscopio de tres
ejes.
• El acelerómetro es usado para la localización inicial del dispositivo en
reposo, dentro del sistema de referencia global, usándolo como
inclinómetro a partir de los datos de aceleración estática.
• El giroscopio es necesario para el cálculo de la ubicación del sistema
de referencia local durante la ejecución del movimiento.
• El algoritmo propuesto, una vez sea validado, permitiría obtener las
señales de aceleración, velocidad y posición lineal y la velocidad y
posición angular de un cuerpo durante la ejecución de un movimiento. A
partir de estas señales, es posible reproducir el movimiento del cuerpo e
implementar un sistema de captura de movimiento de bajo costo y
portátil.

AGRADECIMIENTOS
Sistema para análisis de movimiento a partir de
sensores cinemáticos.
GRACIAS
Related Documents











