LAPORAN PRAKTIKUM SISTEM PENGENDALIAN OTOMATIS SIMULASI PENGENDALIAN SUHU PADA PCT 13 DENGAN LABVIEW 2013 FRESI YULIANA PUTRI TIAS AJI 2414106010 Asisten Praktikum AFIF RACHMAN APRIYANTO 2411100052 Laboratorium Rekayasa Instrumentasi dan Kontrol

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
LAPORAN PRAKTIKUM SISTEM PENGENDALIAN OTOMATIS
SIMULASI PENGENDALIAN SUHU PADAPCT 13 DENGAN LABVIEW 2013
FRESI YULIANA PUTRI TIAS AJI2414106010
Asisten PraktikumAFIF RACHMAN APRIYANTO 2411100052
Laboratorium Rekayasa Instrumentasi dan Kontrol

Program Studi S-1Jurusan Teknik FisikaFakultas Teknologi IndustriInstitut Teknologi Sepuluh NopemberSurabaya 2015
LAPORAN PRAKTIKUM SISTEM PENGENDALIAN OTOMATIS
SIMULASI PENGENDALIAN SUHU PADAPCT 13 DENGAN LABVIEW 2013
FRESI YULIANA PUTRI TIAS AJI2414106010
Asisten Praktikum
AFIF RACHMAN APRIYANTO 2411100052
Laboratorium Rekayasa Instrumentasi dan KontrolProgram Studi S-1Jurusan Teknik FisikaFakultas Teknologi IndustriInstitut Teknologi Sepuluh NopemberSurabaya 2015
ABSTRAK
LabVIEW atau Laboratory Virtual InstrumentEnggineering Workbench adalah software yang dapatdiintegrasikan dengan plant sehingga dapat melakukancontrolling dari sebuah laptop.
Tunning controller merupakan kegiatan menentukannilai parameter kontroler (Kp, Ti, dan Td) untukmendapatkan respon control yang baik. Pada praktikum inimetode tunning controller yang digunakan adalah metodeZiegler-Nichols dan trial and error.
Berdasarkan percobaan yang telah dilakukan padapraktikum ini, didapatkan bahwa mode control yang tepatuntuk pengendalian level ialah mode control PI dengannilai Kp=36 dan Ti=30,4. Sedangkan mode control untukpengendalian suhu ialah PID dengan nilai parameterKp=20, Ti=0.08, dan Td=0.02.

aKata Kunci: D, I, P, Tunning controller,
ABSTRACTLabVIEW or Laboratory Virtual Instrument
Engineering Workbench is a software that can beintegrated with the plant so that it can perform thecontrolling from computer.
Tunning controller is an activity to determine thevalue of controller parameters (Kp, Ti and Td) to obtain agood control response. In this worklab the method oftuning controller that used is the Ziegler-Nichols and trialand error method.
Based on the experiments that have been conductedin this worklab, we found that the proper control mode tocontrol a levelis PI control mode with the value of Kp = 36and Ti = 30.4. While the proper mode control to controltemperature is PID control mode with value of parameterKp = 20, Ti = 0:08, and Td = 0:02.
Keywords: D, I, P, Tunning controller,

KATA PENGANTAR
Puji syukur ke hadirat Tuhan Yang MahaEsa atas berkat rahmat dan karunia-Nyasehingga Laporan Resmi Praktikum SistemPengendalian Otomatik “Simulasi PengendalianSuhu Pada Pct 13 Dengan Labview 2012” ini dapatterselesaikan tepat pada waktunya.
Dalam kesempatan kali ini penyusunmengucapkan terima kasih kepada:1. Asisten laboratorium Larinst yang telah
membimbing dalam pelaksanaan praktikum“Simulasi Pengendalian Suhu Pada Pct 13 DenganLabview 2013”.
2. Rekan-rekan yang telah membantuterlaksananya kegiatan praktikum ini.Penyusun menyadari bahwa banyak
kekurangan dalam pembuatan laporan ini baikdari segi materi maupun penyajian. Untuk itupenyusun mengharapkan kritik dan saran yangbersifat membangun.
Akhir kata penyusun berharap semogalaporan ini bermanfaat bagi penyusun sendirikhususnya dan pembaca pada umumnya.
Surabaya, 19 April 2015
Penyusun


DAFTAR ISI
ABSTRAK..................................iiiABSTRACT..................................iv
KATA PENGANTAR.............................vDAFTAR GAMBAR...........................viii
DAFTAR TABEL...............................xBAB I......................................1
1.1 Latar Belakang......................11.2 Permasalahan........................1
1.3 Tujuan..............................1BAB II.....................................2
2.1 Definisi Sistem Pengendalian........22.2 Metode Tunning Ziegler Nichols Dalam Desain Kontroler PID....................102.3 Labview 2013.......................12
2.3.1 FrontPanel.......................14BAB III...................................16
3.1 Peralatan..........................163.2 Prosedur Percobaan.................16

BAB IV....................................194.1 Analisis Data......................19
4.2 Pembahasan.........................28BAB V.....................................29
5.1 Kesimpulan.........................295.2 Saran..............................30
DAFTAR PUSTAKA............................31

DAFTAR GAMBARGambar 2. 1 Sistem pengendalian lup terbuka2Gambar 2. 2 Sistem pengendalian lup tertutup...........................................3Gambar 2. 3 Sistem Pengendalian lup tertutup...........................................5Gambar 2. 4 Sistem Pengendalian level cairansecara manual..............................6Gambar 2. 5 Sistem pengendalian level cairansecara otomatis............................6Gambar 2. 6 Sistem pengendalian digital....7Gambar 2. 7 Sistem pengendalian kontinyu..10Gambar 2. 8 Kurva S Analisa Grafis Ziegler Nichols...................................10Gambar 2. 9 Kharakteristik keluaran sistem dengan penambahan Kp......................11Gambar 2. 10 LabVIEW 2013.................13Gambar 2. 11 Front Panel..................14Gambar 2. 12 Block Diagram................15Gambar 2. 13 Controls dan Function Palletes..........................................15

Gambar 4. 1 Menentukan nilai Kc dengan cara trial and error...............................20Gambar 4. 2 Parameter PID.................21Gambar 4. 3 Grafik respon mode pengendalian P.........................................21Gambar 4. 4 Parameter PID.................22Gambar 4. 5 Grafik respon mode pengendalian PI........................................22Gambar 4. 6 Parameter PID.................23Gambar 4. 7 Grafik respon mode pengendalian PID.......................................23Gambar 4. 8 Grafik respon PI menggunakan metode trial and error....................24Gambar 4. 9 Mode Pengendalian P nilai Kc=15..........................................25Gambar 4. 10 Mode Pengendalian P nilai Kc=20..........................................25Gambar 4. 11 Mode Pengendalian PID: Kc, Ti, Td (20, 0.01, 0.01).......................26Gambar 4. 12 Mode Pengendalian P nilai Kc=25..........................................27Gambar 4. 13 Mode Pengendalian PID, nilai Kc,Ti,Td(20, 0.02, 0.08)..................27Gambar 4. 14 Mode Pengendalian PID, nilai Kc,Ti,Td(20, 0.08, 0.02)..................27


DAFTAR TABEL
Tabel 2. 1 Formula untuk mencari nilai Kp, Ti, dan Td................................11Tabel 2. 2 Formula untuk mencari nilai Kp, Ti, dan Td................................12
Tabel 4. 1 Parameter controller...........20

BAB I PENDAHULUAN
1.1 Latar Belakang1.2 Permasalahan
Permasalahan dalam praktikum kali iniadalah:1. Bagaimanakah konfigurasi hardware
National Instrument Field Point padapraktikum P2?
2. Bagaimanakah cara pemrogramman Labview2012?
3. Bagaimanakah peran mode Kontrol PIDsecara Real Time?
1.3 TujuanBerikut beberapa diantaranya tujuan
dari praktikum:1. Praktikan dapat mengetahui konfigurasi
hardware National Instrument FieldPoint yang digunakan untukmengendalikan besarnya suhu pada PCT13.
2. Praktikan dapat mengetahui carapemrogramman Labview 2012.
3. Praktikan dapat mengetahui peran modeKontrol PID secara Real Time.

BAB IIDASAR TEORI
2.1Definisi Sistem PengendalianSistem kendali dapat dikatakan sebagai
hubungan antara komponen yang membentuksebuah konfigurasi sistem, yang akanmenghasilkan tanggapan sistem yangdiharapkan. Jadi harus ada yangdikendalikan, yang merupakan suatu sistemfisis, yang biasa disebut dengan kendalian(plant).
Masukan dan keluaran merupakan variabelatau besaran fisis.Keluaran merupakan halyang dihasilkan oleh kendalian, artinya yangdikendalikan; sedangkan masukan adalah yangmempengaruhi kendalian, yang mengaturkeluaran. Kedua dimensi masukan dan keluarantidak harus sama.
Pada sistem kendali dikenal sistem lupterbuka (openloopsystem) dan sistem luptertutup (closedloopsystem). Sistem kendali lupterbuka atau umpan maju (feedforward control)umumnya mempergunakan pengatur (controller)serta aktuator kendali (controlactuator) yangberguna untuk memperoleh respon sistem yangbaik.Sistem kendali ini keluarannya tidakdiperhitungkan ulang oleh controller. Suatukeadaan apakah plant benar-benar telahmencapai target seperti yang dikehendaki

Pengatur
(controller)
Proses/Plant
masukan
keluaran
Kontroller Actuator(Control) Valve)
Plant(Tangki)
Sensor(LM-35)
Level Input Level Output+
-
masukan atau referensi, tidak dapatmempengaruhi kinerja kontroler.
Gambar 2. 1 Sistem pengendalian lup terbuka
Pada sistem kendali yang lain, yaknisistem kendali lup tertutup (closedloopsystem)memanfaatkan variabel yang sebanding denganselisih respon yang terjadi terhadap responyang diinginkan. Sistem seperti ini jugasering dikenal dengan sistem kendali umpanbalik.Aplikasi sistem umpan balik banyakdipergunakan untuk sistem kemudi kapal lautdan pesawat terbang.Perangkat sehari-hariyang juga menerapkan sistem ini adalahpenyetelan temperatur pada almari es, oven,tungku, dan pemanas air.

Gambar 2. 2 Sistem pengendalian lup tertutup
Dengan sistem kendali gambar 2.2, kitabisa ilustrasikan apabila keluaran aktualtelah sama dengan referensi atau masukanmaka input kontroler akan bernilai nol.Nilai ini artinya kontroler tidak lagimemberikan sinyal aktuasi kepada plant,karena target akhir perintah gerak telahdiperoleh. Sistem kendali loop terbuka dantertutup tersebut merupakan bentuk sederhanayang nantinya akan mendasari semua sistempengaturan yang lebih kompleks dan rumit.Hubungan antara masukan (input) dengankeluaran (output) menggambarkan korelasiantara sebab dan akibat proses yangberkaitan.
Masukan juga sering diartikan tanggapankeluaran yang diharapkan.Untuk mendalamilebih lanjut mengenai sistem kendalitentunya diperlukan pemahaman yang cukuptentang hal-hal yang berhubungan dengansistem kontrol. Oleh karena itu selanjutnyaakan dikaji beberapa istilah-istilah yangdipergunakannya.Istilah-istilah umum yangsering didengar dalam sistem pengendalianantara lain :

a.MasukanMasukan atau input adalah rangsangan dariluar yang diterapkan ke sebuah sistemkendali untuk memperoleh tanggapantertentu dari sistem pengaturan. Masukanjuga sering disebut respon keluaran yangdiharapkan.
b.KeluaranKeluaran atau output adalah tanggapansebenarnya yang didapatkan dari suatusistem kendali.
c.PlantSeperangkat peralatan atau objek fisikdimana variabel prosesnya akandikendalikan, msalnya pabrik, reaktornuklir, mobil, sepeda motor, pesawatterbang, pesawat tempur, kapal laut, kapalselam, mesin cuci, mesin pendingin (sistemAC, kulkas, freezer), penukar kalor(heatexchanger), bejana tekan (pressurevessel),robot dan sebagainya.
d.ProsesBerlangsungnya operasi pengendalian suatuvariabel proses, misalnya proses kimiawi,fisika, biologi, ekonomi, dan sebagainya.
e.SistemKombinasi atau kumpulan dari berbagaikomponen yang bekerja secara bersama-samauntuk mencapai tujuan tertentu.
f.Diagramblok

Kontroller Actuator(Control) Valve)
Plant(Tangki)
Sensor(LM-35)
Level Input Level Output+
-
Bentuk kotak persegi panjang yangdigunakan untuk mempresentasikan modelmatematika dari sistem fisik.Contohnyaadalah kotak pada gambar 2.1 atau 2.2.
g.FungsiAlih (TransferFunction)Perbandingan antara keluaran (output)terhadap masukan (input) suatu sistempengendalian. Suatu misal fungsi alihsistem pengendalian loop terbuka gambar2.1 dapat dicari dengan membandingkanantara output terhadap input. Demikianpula fungsi alih pada gambar 2.3.
h.Sistem Pengendalian Umpan Maju(openloopsystem)Sistem kendali ini disebut juga sistempengendalian lup terbuka .Pada sistem inikeluaran tidak ikut andil dalam aksipengendalian sebagaimana dicontohkangambar 2.1. Di sini kinerja kontrolertidak bisa dipengaruhi oleh inputreferensi.
i.Sistem Pengendalian Umpan BalikIstilah ini sering disebut juga sistempengendalian loop tertutup. Pengendalianjenis ini adalah suatu sistem pengaturandimana sistem keluaran pengendalian ikutandil dalam aksi kendali.

Sensor(LM-35)
Gambar 2. 3 Sistem Pengendalian lup tertutup
j.Sistem Pengendalian ManualSistem pengendalian dimana faktor manusiasangat dominan dalam aksi pengendalianyang dilakukan pada sistem tersebut. Peranmanusia sangat dominan dalam menjalankanperintah, sehingga hasil pengendalian akandipengaruhi pelakunya. Pada sistem kendalimanual ini juga termasuk dalam kategorisistem kendali jerat tertutup.Tanganberfungsi untuk mengatur permukaan fluidadalam tangki.Permukaan fluida dalam tangkibertindak sebagai masukan, sedangkanpenglihatan bertindak sebagaisensor.Operator berperan membandingkantinggi sesungguhnya saat itu dengan tinggipermukaan fluida yang dikehendaki, dankemudian bertindak untuk membuka ataumenutup katup sebagai aktuator gunamempertahankan keadaan permukaan yangdiinginkan.

Gambar 2. 4 Sistem Pengendalian level cairansecara manual
k.Sistem Pengendalian OtomatisSistem pengendalian dimana faktor manusiatidak dominan dalam aksi pengendalian yangdilakukan pada sistem tersebut.Peranmanusia digantikan oleh sistem kontroleryang telah diprogram secara otomatissesuai fungsinya, sehingga bisa memerankanseperti yang dilakukan manusia.Di duniaindustri modern banyak sekali sistemkendali yang memanfaatkan kontrolotomatis, apalagi untuk industri yangbergerak pada bidang yang prosesnyamembahayakan keselamatan jiwa manusia.

Gambar 2. 5 Sistem pengendalian level cairansecara otomatis
l.Variabel terkendali (Controlled variable)Besaran atau variabel yang dikendalikan,biasanya besaran ini dalam diagram kotakdisebut processvariable (PV). Level fluidapada bejana pada gambar 2.4 merupakanvariabel terkendali dari prosespengendalian. Temperatur pada gambar 2.5merupakan contoh variabel terkendali darisuatu proses pengaturan.
m.Manipulated variableMasukan dari suatu proses yang dapatdiubah -ubah atau dimanipulasi agarprocessvariable besarnya sesuai dengan setpoint(sinyal yang diumpankan pada suatu sistemkendali yang digunakan sebagai acuan untukmenentukan keluaran sistem kontrol).Masukan proses pada gambar 2.4 adalah lajualiran fluida yang keluar dari bejana ,

sedangkan masukan proses dari gambar 2.5adalah laju aliran fluida yang masukmenuju bejana. Laju aliran diatur denganmengendalikan bukaan katup.
n.Sistem Pengendalian DigitalDalam sistem pengendalian otomatisterdapat komponen -komponen utama sepertielemen proses, elemen pengukuran(sensingelement dan transmitter), elementcontroller(controlunit), dan finalcontrolelement (controlvalue).
Gambar 2. 6 Sistem pengendalian digital
o.Gangguan (disturbance)Suatu sinyal yang mempunyai k ecenderunganuntuk memberikan efek yang melawanterhadap keluaran sistem pengendalian(variabel terkendali).Besaran ini jugalazim disebut load.
p.Sensing element

Bagian paling ujung suatu sistempengukuran (measuringsystem) atau seringdisebut sensor.Sensor bertugas mendeteksigerakan atau fenomena lingkungan yangdiperlukan sistem kontroler. Sistem dapatdibuat dari sistem yang paling sederhanaseperti sensor on/off menggunakan limitswitch,sistem analog, sistem bus paralel, sistembus serial serta si stem mata kamera.Contoh sensor lainnya yaitu thermocoupleuntuk pengukur temperatur, accelerometeruntuk pengukur getaran, dan pressuregaugeuntuk pengukur tekanan.
q.TransmitterAlat yang berfungsi untuk membaca sinyalsensing element dan mengubahnya supayadimengerti oleh controller.
r.AktuatorPiranti elektromekanik yang berfungsiuntuk menghasilkan daya gerakan. Perangkatbisa dibuat dari system motor listrik(motor DC servo, moto r DC stepper,ultrasonic motor, linier moto, torquemotor , solenoid), sistem pneumatik danhidrolik. Untuk meningkatkan tenagamekanik aktuator atau torsi gerakan makabisa dipasang sistem gearbox atausprochetchain.
s.TransduserPiranti yang berfungsi untuk mengubah satu
bentuk energi menjadi energi bentuklainnya atau unit pengalih sinyal. Suatucontoh mengubah sinyal gerakan mekanismenjadi energi listrik yang terjadi padaperistiwa pengukuran getaran. Terkadangantara transmiter dan tranduserdirancukan, keduanya memang mempunyaifungsi serupa. Transduser lebih bersifatumum, namun transmiter pemakaiannya padasistem pengukuran.
t. Measurement VariableSinyal yang keluar dari transmiter, inimerupakan cerminan sinyal pengukuran.
u. Setting pointBesar variabel proses yang dikehendaki.Suatu kontroler akan selalu berusahamenyamakan variabel terkendali terhadapsetpoint.
v.ErrorSelisih antara set point dikurangivariabel terkendali. Nilainya bisa positifatau negatif, bergantung nilai setpoint danvariabel terkendali. Makin kecil errorterhitung, maka makin kecil pula sinyalkendali kontroler terhadap plant hinggaakhirnya mencapai kondisi tenang ( steadystate)
w.Alat Pengendali (Controller)Alat pengendali sepenuhnya menggantikanperan manusia dalam mengendalikan suatu

proses. Controller merupakan elemen yangmengerjakan tiga dari empat tahappengaturan, yaitu : membandingkan setpointdengan measurementvariable, menghitungberapa banyak koreksi yang harusdilakukan, danmengeluarkan sinyal koreksisesuai dengan hasil perhitungannya
x. Control UnitBagian unit kontroler yang menghitungbesarnya koreksi yang diperlukan.
y. Final Controller ElementBagian yang berfungsi untuk mengubahmeasurement variable dengan memanipulasibesarnya manipulated variable atas dasarperintah kontroler.
z.Sistem Pengendalian KontinyuSistem pengendalian yang ber jalan secarakontinyu, pada setiap saat respon sistemselalu ada.Pada gambar 2.7. Sinyal e(t)yang masuk ke kontroler dan sinyal m(t)yang keluar dari kontroler adalah sinyalkontinyu. (Eviandriani, 2010)[1]
Gambar 2. 7 Sistem pengendalian kontinyu
2.2Metode Tunning Ziegler Nichols DalamDesain Kontroler PID

Aspek yang sangat penting dalam desainkontroler PID ialah penentuan parameterkontroler PID supaya sistem closeloop memenuhi kriteria performansi yangdiinginkan. Hal ini disebut jugadengan tuning kontroler.
Terkadang pemodelan matematis suatuplant susah untuk dilakukan. Jika hal initerjadi maka perancangan kontroler PIDsecara analitis tidak mungkin dilakukansehingga perancangan kontroler PID harusdilakukan secara eksperimental.
a. Metode ke 1 (Metode Kurva)Ziegler– Nichols mengusulkan aturan
untuk menentukan nilai Kp, Ti dan Tdberdasarkan pada karakteristik tanggapanperalihan dari plant yang diberikan. Metodepertama Ziegler–Nichols menentukan nilaiKp, Ti, dan Td:
Gambar 2. 8 Kurva S Analisa Grafis ZieglerNichols
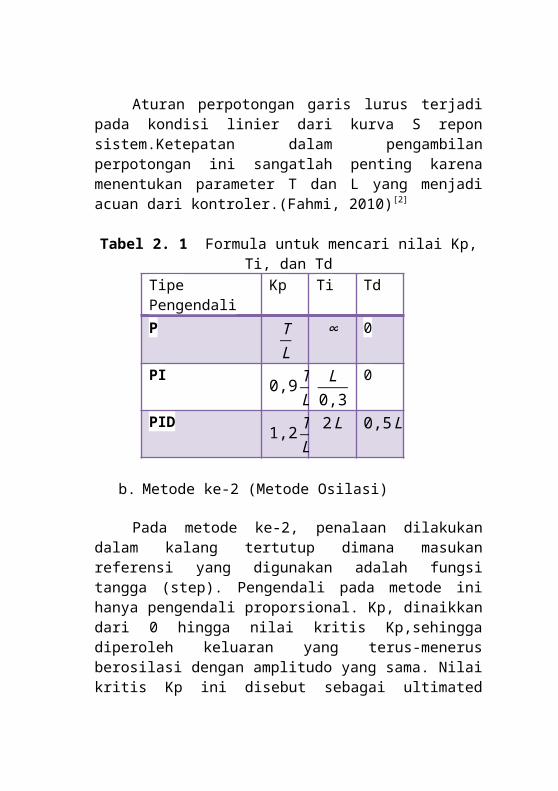
Aturan perpotongan garis lurus terjadipada kondisi linier dari kurva S reponsistem.Ketepatan dalam pengambilanperpotongan ini sangatlah penting karenamenentukan parameter T dan L yang menjadiacuan dari kontroler.(Fahmi, 2010)[2]
Tabel 2. 1 Formula untuk mencari nilai Kp,Ti, dan Td
TipePengendali
Kp Ti Td
P TL
∞ 0
PI 0,9 TL
L0,3
0
PID 1,2 TL
2L 0,5L
b. Metode ke-2 (Metode Osilasi)
Pada metode ke-2, penalaan dilakukandalam kalang tertutup dimana masukanreferensi yang digunakan adalah fungsitangga (step). Pengendali pada metode inihanya pengendali proporsional. Kp, dinaikkandari 0 hingga nilai kritis Kp,sehinggadiperoleh keluaran yang terus-menerusberosilasi dengan amplitudo yang sama. Nilaikritis Kp ini disebut sebagai ultimated
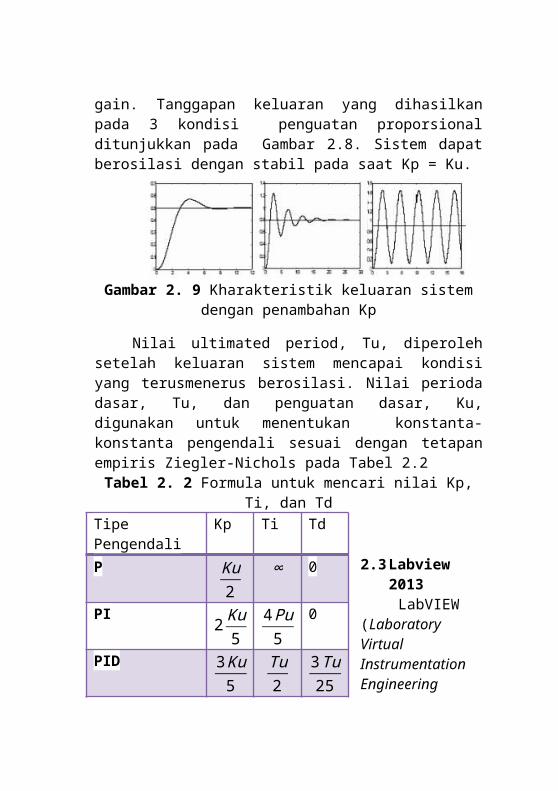
gain. Tanggapan keluaran yang dihasilkanpada 3 kondisi penguatan proporsionalditunjukkan pada Gambar 2.8. Sistem dapatberosilasi dengan stabil pada saat Kp = Ku.
Gambar 2. 9 Kharakteristik keluaran sistemdengan penambahan Kp
Nilai ultimated period, Tu, diperolehsetelah keluaran sistem mencapai kondisiyang terusmenerus berosilasi. Nilai periodadasar, Tu, dan penguatan dasar, Ku,digunakan untuk menentukan konstanta-konstanta pengendali sesuai dengan tetapanempiris Ziegler-Nichols pada Tabel 2.2Tabel 2. 2 Formula untuk mencari nilai Kp,
Ti, dan Td
2.3Labview2013LabVIEW
(LaboratoryVirtualInstrumentationEngineering
TipePengendali
Kp Ti Td
P Ku2
∞ 0
PI 2 Ku5
4Pu5
0
PID 3Ku5
Tu2
3Tu25

Workbench) adalah software pemrograman visualyang dikembangkan oleh NationalInstrument.Pengguna program cukup memasukkanlogic berupa icon-icon yang dirangkai sesuaialur logika pemrograman.Selain menggunakanicon, syntax berupa teks juga dapat digunakanuntuk memprogram dengan standard pemrogramanMathscript Language.
LabVIEW dapat digunakan untukpemrosesan dan visualisasi data dalam bidangakuisisi data, kendali instrumentasi sertaautomasi industri.Pertama kali dikembangkanoleh perusahaan National Instruments padatahun 1986. Perangkat lunak ini dapatdijalankan pada sistem operasi Linux, Unix,Mac OS X dan Windows. Labview yang digunakandalam tugas akhir ini yakni labview 2010seperti yang terlihat di Gambar 3.4(NI,2012)[3]
Gambar 2. 10 LabVIEW 2013
Program LabVIEW disebut dengan VirtualInstrumen (VI) karena beberapa tampilan danoperasi pada program LabVIEW menyerupaisuatu instrument seperti osiloskop danmultimeter. Setiap VI menggunakan fungsi-fungsi yang memanipulasi input dari userinterface atau sumber lain danmenampilkan informasi tersebut ataumemindahkan informasi tersebut ke file/komputer lain.
LabVIEW merupakan suatu bahasapemrograman berbasis grafis yang menggunakanicon sebagai ganti bentuk teks untukmenciptakan aplikasi.Berlawanan denganbahasa pemrograman berbasis text, di manainstruksi menentukan pelaksanaan program.Labview menggunakan pemrograman dataflow,yang mana alur data menentukan pelaksanaan(execution). Tampilan pada Labview menirukaninstrument secara virtual.
Membangun antarmuka pemakai denganmenggunakan satu set peralatan (tools) danobjek-objek. Antarmuka pemakai dikenalsebagai panel depan (front Panel). Selanjutnyamenambahkan kode menggunakan grafis yangmewakili fungsi untuk mengendalikan objekpanel muka. Diagram blok berisi kode ini.Dalam beberapa hal, diagram blok menyerupaisuatu flowchart( Herwins, 2012).

LabVIEW terdiri dari dua komponen, yaitu :1.Front panel, merupakan komponen tampilan
Labview.2.Block diagram, merupakan komponen logika
yang akan dieksekusi.
2.3.1 FrontPanelFront panel merupakan interface antara
pengguna (user) dengan program. Didalam frontpanel terdapat Kontrol (Input) dan Indikator(Output). Kontrol pada frontpanel dapat berupaknop, tombol, dial dan lainnya. Sedangkanuntuk indikator (Output) dapat berupa LED,grafik dan tampilan lainnya.
Gambar 2. 11 Front Panel
Kontrol menirukan input instrument danmenyuplai data ke diagram blok pada VI yangbersangkutan. Indikator menirukan instrumenkeluaran dan menampilkan data yang diperolehatau dihasilkan oleh diagram blok.2.3.2 Block Diagram

Setelah merancang front panel,menambahkan kode menggunakan grafis yangmewakili fungsi untuk mengendalikan obyek-obyek panel muka. Blok diagram berisisourcecode grafis. Obyek-obyek panel mukanampak seperti terminal pada diagram blok.Virtual Instrumen pada Gambar 3.6 menunjukkan beberapa obyek diagram blokseperti terminal-terminal, fungsi-fungsi,dan alur.
Gambar 2. 12 Block Diagram
Fungsi-fungsi yang dapat dilakukan olehLabVIEW terlihat pada controls palette dan functionpallete yang terdapat pada kedua komponenutama LabVIEW. Pada front panel, fungsi yangdapat dilakukan adalah fungsi-fungsitampilan seperti grafik, indikator numeris,array, string, kontrol numeris dan lain-lain.Sedangkan pada block diagram, fungsi yangdapat dilakukan adalah fungsi-fungsipemrograman seperti struktur, matematis,file I/O, probabilitas, analisis sinyal danlain-lain. (NI,2012)[3]

Gambar 2. 13 Controls dan Function Palletes

BAB IIIMETODOLOGI PERCOBAAN
3.1 PeralatanPeralatan yang digunakan pada
praktikum kali ini adalah:1. LABVIEW 2013 dan hardware National
Instrument Field Point2. Satu set PCT 13 + kabel penghubung
LM354. Rangkaian Triac5. Pompa sirkulasi air dingin
3.2 Prosedur Percobaan1. Labview diaktifkan dengan diklik
pada Labview 2013, kemudian blank VIdiklik untuk membuat front panel danblock diagram.
Gambar 3. 1 Tampilan Labview 2013
2. Front Panel Simulasi Temperatur danLevel Kontrol (real plant)ditampilkan.
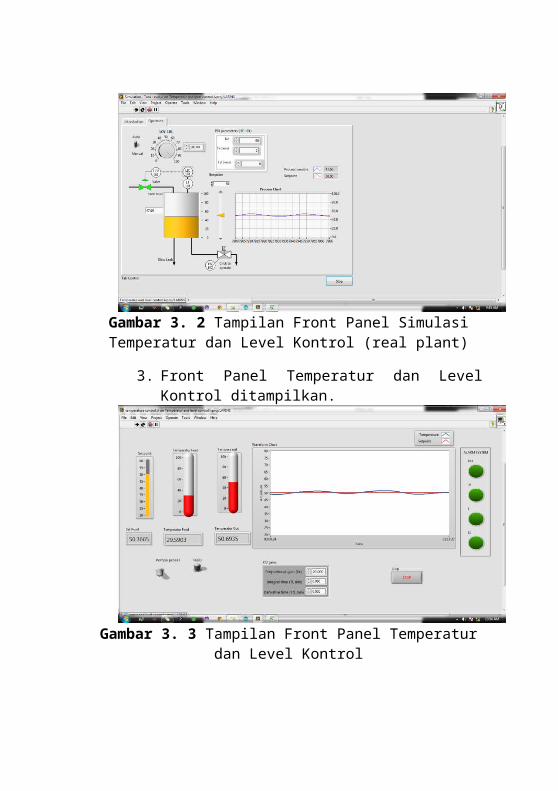
Gambar 3. 2 Tampilan Front Panel SimulasiTemperatur dan Level Kontrol (real plant)
3. Front Panel Temperatur dan LevelKontrol ditampilkan.
Gambar 3. 3 Tampilan Front Panel Temperaturdan Level Kontrol

4. Power supply dinyalakan agar pompadan heater bekerja.
5. Set point diatur sebesar 50 untukreal plant.
6. Set point diatur 45 dan 50 untuktemperatur control.
7. Nilai Kp, Ti dan Td diubah-ubahuntuk melakukan tuning pengendalian.
8. Respon sistem diamati dan dicatat(screenshoot).
9. Pengambilan data dilakukan sebanyak3 kali.

BAB IVANALISIS DATA DAN PEMBAHASAN
4.1 Analisis DataSebelum melakukan percobaan pada
plant real, praktikan melakukan simulasidengan menggunakan software Labview.Simulasi yang dilakukan ialahpengendalian level air menggunakanLabview. Pada percobaan ini dilakukan duabuah metode tunning. Yang pertamamenggunakan metode Ziegler-Nichols dan Trialand Error. Data percobaan yang didapatkanialah sebagai berikut:
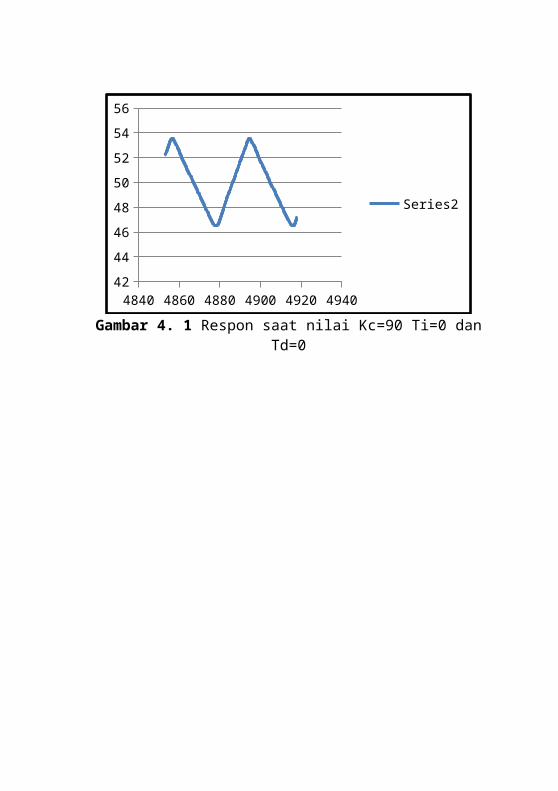
Praktikan menentukan nilai melaluipercobaan dengan mengubah nilai Kc darimulai 10-100 Ti=0 dan Td=0. Kemudianmengamati respon yang memiliki amplitudetetap atau mencari osilasi yang stabil(maksudnya jarak puncak ke setpoint=jaraklembah ke setpoint). Dan didapatkan nilaiKc=90.
4840 4860 4880 4900 4920 49404244464850525456
Series2
Gambar 4. 1 Respon saat nilai Kc=90 Ti=0 danTd=0

Gambar 4. 2 Menentukan nilai Kc denganmemasukkan nilai 10-100 dan mengamati
responnya.
Dari gambar 4.1 diperoleh besarnyaTu (Periode gelombang) yaitu 38.Selanjutnya kami melakukan tunningdengan menggunkan metode ke 2 Ziegler-Nichols sehingga diperoleh data sebagaiberikut:
Tabel 4. 1 Parameter controllerKp Ti Td
P 0,2∙Kc=0,2∙90=45- -PI 0,45∙Kc=0,45∙90=40,54Tu
5=4∙385
=30,4-

PID 0,6∙Kc=0,6∙90=54,4Tu2
=382
=19 3Tu25
=3∙3825
=4,56
Grafik respon yang dihasilkan padamode pengendalian P dengan menggunakanmetode Ziegler-Nichols
Gambar 4. 3 Parameter PID
Gambar 4. 4 Grafik respon mode pengendalianP
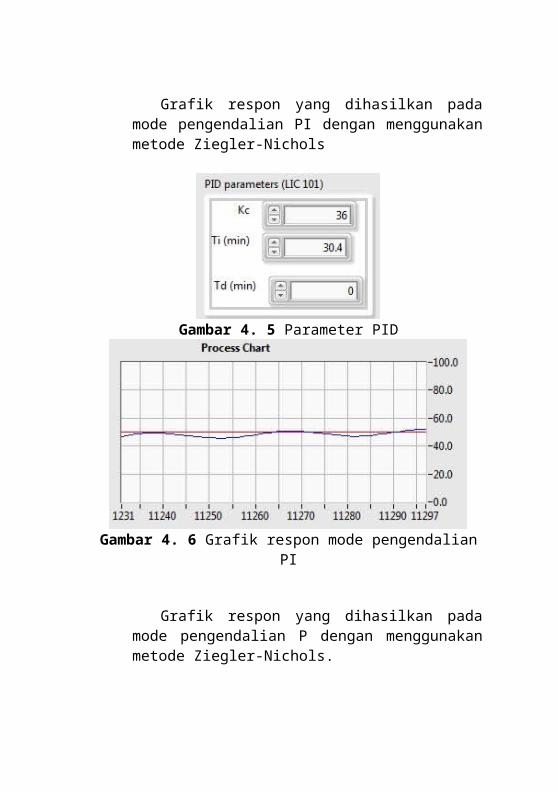
Grafik respon yang dihasilkan padamode pengendalian PI dengan menggunakanmetode Ziegler-Nichols
Gambar 4. 5 Parameter PID
Gambar 4. 6 Grafik respon mode pengendalianPI
Grafik respon yang dihasilkan padamode pengendalian P dengan menggunakanmetode Ziegler-Nichols.

Gambar 4. 7 Parameter PID
Gambar 4. 8 Grafik respon mode pengendalianPID
Sedangkan dengan menggunakan metodetrial and error data terbaik yang kamidapatkan beserta grafik responnya ialahsebagai berikut ; Kc,Ti,Td (5, 0.08, 0)

Gambar 4. 9 Grafik respon PI menggunakanmetode trial and error
Berdasarkan percobaan yang telahdilakukan yaitu pengendalian suhu padaPCT 13 menggunakan Labview 2012. Padapercobaan tunning dengan menggunakanmetode trial and error didapatkan datasebagai berikut:
Set Point45o C 50o C
Data Kc Ti Td Kc Ti Td1 15 0 0 25 0 02 20 0 0 20 0.0
20.08
3 20 0.10
0.10 20 0.08
0.02

Dan respon system yang didapatkanadalah sebagai berikut: Pada set point 45o C
Gambar 4. 10 Mode Pengendalian P nilai Kc=15
Gambar 4. 11 Mode Pengendalian P nilai Kc=20

Gambar 4. 12 Mode Pengendalian PID: Kc, Ti,Td (20, 0.01, 0.01)
Pada set point 50o C

Gambar 4. 13 Mode Pengendalian P nilai Kc=25
Gambar 4. 14 Mode Pengendalian PID, nilaiKc,Ti,Td(20, 0.02, 0.08)

Gambar 4. 15 Mode Pengendalian PID, nilaiKc,Ti,Td(20, 0.08, 0.02)
4.2 PembahasanUntuk melakukan tunning controller
dapat dilakukan dengan menggunakanberbagai metode. Beberapa metode yangtelah kami pelajari pada praktikum kaliini ialah metode Ziegler-Nichols danmetode trial and error. Berdasarkan analisadata yang telah praktikan lakukan,praktikan menyimpulkan bahwa dalammelakukan tunning controller nilai Kp,Ti, dan Td akan mempengaruhi respon suatusystem. Adakalanya suatu system controlhanya perlu menggunakan pengendalian Psaja, PI, PD, ataupun PID. Itu tergantung

pada system tersebut. Misalkan padapengendalian level yang telah kitalakukan, ternyata pengendalian yangpaling cocok ialah dengan menggunakanpengendalian PI. Walaupun sebenarnyamenggunakan pengendalian P saja sudahcukup tapi akan lebih baik jikamenggunakan pengendalian PI. Hal inidibuktikan dengan grafik respon padagambar 4.5 penambahan konstanta Timenyebabkan offset berkurang. Sedangkanpada pengendalian suhu, mode pengendalianterbaik ialah dengan menggunakanpengendalian PID. Hal ini dibuktikanmelalui grafik respon pada gambar 4.11untuk set poin 45o C dan grafik responpada gambar 4.14 untuk set point 50o C.PID ini cocok digunakan untukpengendalian suhu karena suhu memilikirespon yang lambat dan PID sendiriberfungsi untuk mempercepat reaksi sebuahsistem.

BAB VPENUTUP
5.1 KesimpulanBerdasarkan praktikum yang telah kami
lakukan, maka dapat kami simpulkan:1. Kp atau konstanta proporsional. Kp
berfungsi sebagai Gain atau penguat.Pada control proporsional keluarannyaialah hasil kali kontanta proporsionaldengan error. Jika nilai Kp kecil,kontroler proporsional hanya mampumelakukan koreksi kesalahan yangkecil, sehingga akan menghasilkanrespon sistem yang lambat. Jika nilaiKp dinaikkan, respon sistemmenunjukkan semakin cepat mencapaikeadaan mantap. Namun jika nilai Kpdiperbesar sehingga mencapai hargayang berlebihan, akan mengakibatkansistem bekerja tidak stabil, ataurespon sistem akan berosilasi.
2. Ti atau konstanta Integral. Padakontrol Integral dapat memperbaikisekaligus menghilangkan respon steady-state, namun pemilihan Ti yang tidaktepat dapat menyebabkan respontransien yang tinggi sehingga dapatmenyebabkan ketidakstabilan sistem.

Pemilihan Ti yang sangat tinggi justrudapat menyebabkan output berosilasikarena menambah orde system.
3. Td atau konstanta derivative. Denganmeningkatkan nilai Td, dapatmeningkatkan stabilitas sistem danmengurangi overshoot.
4. Pada percobaan simulasi pengendalianlevel menggunakan Labview. Modepengendali yang paling baik yaitumenggunakan mode pengendali PI dengannilai konstanta Kp=36 dan Ti=30,4.Pada pengendalian level penggunaanpengendali PI lebih cocok.
5. Pada percobaan simulasi pengendaliansuhu pada pct 13 dengan labview 2012.Mode pengendali yang paling baik yaitumenggunakan mode pengendali PID.Penambahan nilai Td diperlukan karenasuhu memiliki respon yang lambatsedangkan konstanta Td itu sendirimempunya fungsi salah satunya untukmeningkatkan stabilitas system danmenurunkan overshoot. Nilai konstantaKp=20 Ti=0.08 dan Td=0.02 menghasilkangrafik respon paling baik padapercobaan ini.
5.2 Saran

Saran yang dapat diberikanuntuk percobaan selanjutnyamengenai pengendalian suhumenggunakan PCT13 adalah harusdipastikan bahwa sensor suhu (LM35)pada modul telah terpasang denganbenar. Karena kesalahan pemasanganatau perubahan letak sensor dapatmempengaruhi pembacaan nilai. Halini dapat mempengaruhi responsystem yang terbentuk di softwareLabview.
DAFTAR PUSTAKA
[1] Laboratorium Instrumentasi Teknik Fisika,2014 “Modul Praktikum SistemPengendalianOtomatis”
[2] Wicaksono Handy. 2004. Analisa Performansi danRobustnessBeberapa Metode Tuning Kontroler PID pada Motor DC.
[3] Ogata, Katsuhiko, Modern Control Engineering,Prentice-Hall, Englewood Cliffs, NJ.

LAMPIRAN
Judul: Analisa Performansi dan Robustness Beberapa Metode Tuning Kontroler PID pada Motor DC.
Penulis: Handy Wicaksono
Review:Dari hasil simulasi, kontroler PID
dengan metode tuning Ziegler Nichols danCohen-Coon mempunyai performansi yang lebihbaik (rise time sekitar 0.1 s dansettling time di bawah 1 s) dari metodeDirect Synthesis (rise time dan settlingtime sebesar 5 s). Juga kedua metodetersebut memberikan Robustness sistem yanglebih baik, dengan phase margin 41.40 dan42.60, dibanding metode terakhir yangmemberikan phase margin 88.50. metodeDirect Synthesis memberikan performansiyang lebih baik (tanpa overshoot, rise timedan settling time sebesar 5 s), dibandingkedua metode lainnya (maximum overshoot:32%, rise time : 2.2s, dan settling timedi atas 8s). Jadi, untuk aplikasi nyatametode Direct Synthesis memberikan hasilyang jauh lebih baik dari kedua metode

lainnya. Beberapa metode tuning yang akandibahas di sini ialah Ziegler-Nichols,Cohen-Coon, dan Direct Synthesis. Denganmengimplementasikan kontroler PID pada motorDC, akan dianalisa performansi danRobustness dari system tersebut. Secara umummetode Ziegler-Nichols dan Cohen-Coonmemberikan performansi yang lebih baik (risetime sekitar 0.1s dan settling time di bawah 1s), jugaRobustness yang lebih baik (phase marginsekitar 400). Namun jika diberikanpendekatan nonlinier akibat keterbatasanmotor DC, metode Direct Synthesis memberikanperformansi yang jauh lebih baik
Kekurangan:Terlalu banyak metode yang dibahas sehingga tidak focus dan informasi yang diberikan pada tiap-tiap metode masih kurang maksimal.
Kelebihan:Jurnal ini memberikan cukup banyak informasimengenai metode tunning controller yaitu 3metode sekaligus. Metode Ziegler-nichols,Cohen-choon, dan Direct Synthetis. Sehingga

menambah pengetahuan pembaca bahwa adabanyak metode dalam melakukan tunningcontroller. Tidak hanya Ziegler-Nichols danCohen-choon saja yang selama ini palingpopular.
Related Documents











