J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517 Sistem Otomasi Penggerak Kamera Dengan Motor Step Sebagai Alat Bantu Kalibrasi Alat Ukur Panjang 1,2 Adam, Irwan, 1 Adam W & 2 Irwan D. W. S. 1 Author Address 2 Author Address 1 Author E-mail 2 Author E-mail Abstract Alat ukur panjang merupakan alat yang digunakan untuk mengukur jarak antara dua titik dan mengukur pada kegiatan teknik maupun penelitian yang paling banyak dipakai dalam dunia industri maupun perdagangan. Sehingga, pengujian alat ukur panjang mutlak dibutuhkan untuk menjamin kebenaran alat ukur. Saat ini pengujian tera dan tera ulang alat ukur panjang yang ada di Pusat Pengembangan Sumber Daya Manusia Kemetrologian (PPSDMK) Bandung dilakukan dengan membandingkan alat ukur terhadap komparator standar. Pengamatan dilakukan menggunakan web-camera yang ditampilkan pada layar monitor. Kondisi kamera terpasang diam sehingga area pengamatan titik uji sempit, pemosisian kamera, dan pembacaan hasil uji harus dilakukan secara manual. Untuk meningkatkan mobilitas kamera, dalam projek akhir ini dibuat sistem otomasi penggerak kamera menggunakan motor step. Motor dikontrol menggunakan mikrokontroler, sehingga kecepatan motor dapat diatur untuk menempatkan kamera pada posisi yang diinginkan menggunakan antar muka yang yang dilengkapi dengan pengolahan citra sederhana sehingga dapat mendeteksi posisi skala dan menentukan posisi kamera. Berdasarkan hasil pengujian yang telah dilakukan, posisi kamera telah dapat dikontrol sehingga motor akan berhenti ketika kamera mendeteksi posisi skala standar, serta menampilkan citra gambar secara langsung. Karakteristik pengukuran selisih skala meliputi sensitivitas 0,095 mm/pixel, akurasi 96% dan presisi 98%.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
Sistem Otomasi Penggerak Kamera Dengan MotorStep Sebagai Alat Bantu Kalibrasi Alat Ukur
Panjang
1,2Adam, Irwan, 1Adam W & 2Irwan D. W. S.1Author Address2Author Address
1Author E-mail2Author E-mail
AbstractAlat ukur panjang merupakan alat yang digunakan untuk mengukur jarakantara dua titik dan mengukur pada kegiatan teknik maupun penelitianyang paling banyak dipakai dalam dunia industri maupun perdagangan.Sehingga, pengujian alat ukur panjang mutlak dibutuhkan untuk menjaminkebenaran alat ukur. Saat ini pengujian tera dan tera ulang alat ukurpanjang yang ada di Pusat Pengembangan Sumber Daya ManusiaKemetrologian (PPSDMK) Bandung dilakukan dengan membandingkan alat ukurterhadap komparator standar. Pengamatan dilakukan menggunakan web-camerayang ditampilkan pada layar monitor. Kondisi kamera terpasang diamsehingga area pengamatan titik uji sempit, pemosisian kamera, danpembacaan hasil uji harus dilakukan secara manual. Untuk meningkatkanmobilitas kamera, dalam projek akhir ini dibuat sistem otomasipenggerak kamera menggunakan motor step. Motor dikontrol menggunakanmikrokontroler, sehingga kecepatan motor dapat diatur untukmenempatkan kamera pada posisi yang diinginkan menggunakan antar mukayang yang dilengkapi dengan pengolahan citra sederhana sehingga dapatmendeteksi posisi skala dan menentukan posisi kamera. Berdasarkan hasilpengujian yang telah dilakukan, posisi kamera telah dapat dikontrolsehingga motor akan berhenti ketika kamera mendeteksi posisi skalastandar, serta menampilkan citra gambar secara langsung. Karakteristikpengukuran selisih skala meliputi sensitivitas 0,095 mm/pixel, akurasi96% dan presisi 98%.
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
Keywords: Alat ukur; control; web-camera; motor step; citra; pengukuran
1 IntroductionAlat ukur panjang merupakan salah satu alat yang banyakdigunakan dalam bidang perdagangan. Sehingga, perlu dilakukanpeneraan untuk memastikan kebenarannya sesuai dengan SK DirjenPDN No. 32 tahun 2010 tentang Syarat Teknis Alat Ukur Panjang[5].Pada saat pelaksanaan pengujian alat ukur panjang terutama banukur di Pusat Pengembangan Sumber Daya Manusia Kemetrologian(PPSDMK) Bandung dilakukan dengan metode komparasi antara alatukur yang diuji dengan meter standar. Pengamatan dilakukanmelalui kamera yang ditampilkan pada layar monitor. Penempatanserta pembacaan skala hasil pengukuran dilakukan secara manual.Hal ini berpotensi memungkinkan terjadinya kesalahan paralaks,sehingga bisa mengakibatkan kesalahan penghitungan, sudutpengamatan kamera atau penempatan posisi kamera. Posisi kamerayang diam mengakibatkan titik ujinya sempit. Sehngga, metodeyang digunakan saat ini menyita waktu dan tenaga yang cukupbesarPembuatan sistem penggerak kamera dengan menggunakan motor stepdengan program pengolah citra untuk menentukan posisi perhentiankamera serta mengukur jarak antara dua titik uji danmenghasilkan laporan kalibrasi alat ukur panjang terhadapstandar. Hal ini untuk meningkatkan kemampuan sistem, sehinggamembantu penguji dalam mengatur posisi kamera. Integrasipergerakan kamera dengan sistem pengolahan citra yang ditangkapkamera dapat mempermudah penguji menentukan posisi skala yangpaling tepat serta mempermudah penghitungan nilai jarak antaradua titik uji. Langkah ini dapat memperluas titik uji,meminimalisasi terjadinya kesalahan paralaks serta menghemat waktudan tenaga penguji.
2 KalibrasiKalibrasi adalah serangkaian kegiatan yang membentuk hubunganantara nilai yang ditunjukkan oleh instrumen ukur atau sistempengukuran, atau nilai yang diwakili oleh bahan ukur, dengannilai-nilai yang sudah diketahui yang berkaitan dari besaran
2
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
yang diukur dalam kondisi tertentu[1]. Tujuan kalibrasi adalahuntuk mengetahui ketertelusuran suatu alat ukur, mengetahuisimpangan alat ukur, serta menjamin alat ukur telah tertelusurdengan standar nasional maupun internasional. Hal ini akanbermanfaat untuk menjaga kondisi alat ukur agar tetap sesuaidengan spesifikasi dan mendukung sistem mutu di industri ataubidang lain yang berkaitan dengan alat tersebut.Kalibrasi panjang merupakan suatu pengujian ketertelusuranterhadap alat ukur panjang. Kalibrasi panjang ini dilakukandengan membandingkan alat ukur yang diuji dengan standar ujiyang juga disebut komparator. Teknis pengujian panjang yangdilakukan mengacu pada OIML R35[2] yang telah disesuaikanmetodenya pada SK Dirjen PDN No. 32 tahun 2010 tentang SyaratTeknis Alat Ukur Panjang[5].
3 Prinsip Dasar
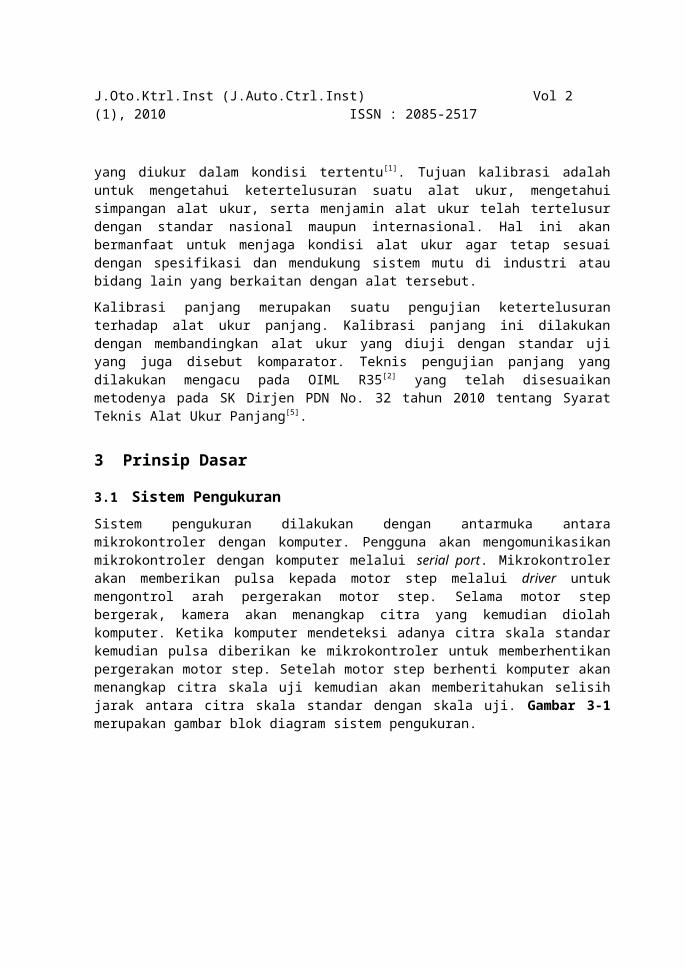
3.1 Sistem PengukuranSistem pengukuran dilakukan dengan antarmuka antaramikrokontroler dengan komputer. Pengguna akan mengomunikasikanmikrokontroler dengan komputer melalui serial port. Mikrokontrolerakan memberikan pulsa kepada motor step melalui driver untukmengontrol arah pergerakan motor step. Selama motor stepbergerak, kamera akan menangkap citra yang kemudian diolahkomputer. Ketika komputer mendeteksi adanya citra skala standarkemudian pulsa diberikan ke mikrokontroler untuk memberhentikanpergerakan motor step. Setelah motor step berhenti komputer akanmenangkap citra skala uji kemudian akan memberitahukan selisihjarak antara citra skala standar dengan skala uji. Gambar 3-1merupakan gambar blok diagram sistem pengukuran.
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
:
3.2 Motor Step
4
Pengguna Antarmuka
Mikrokontroller
Motor & Driver
Pergerakan Kamera
Citra/Sensor posisi
Gambar 3-1 Diagram Sistem Pengukuran
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
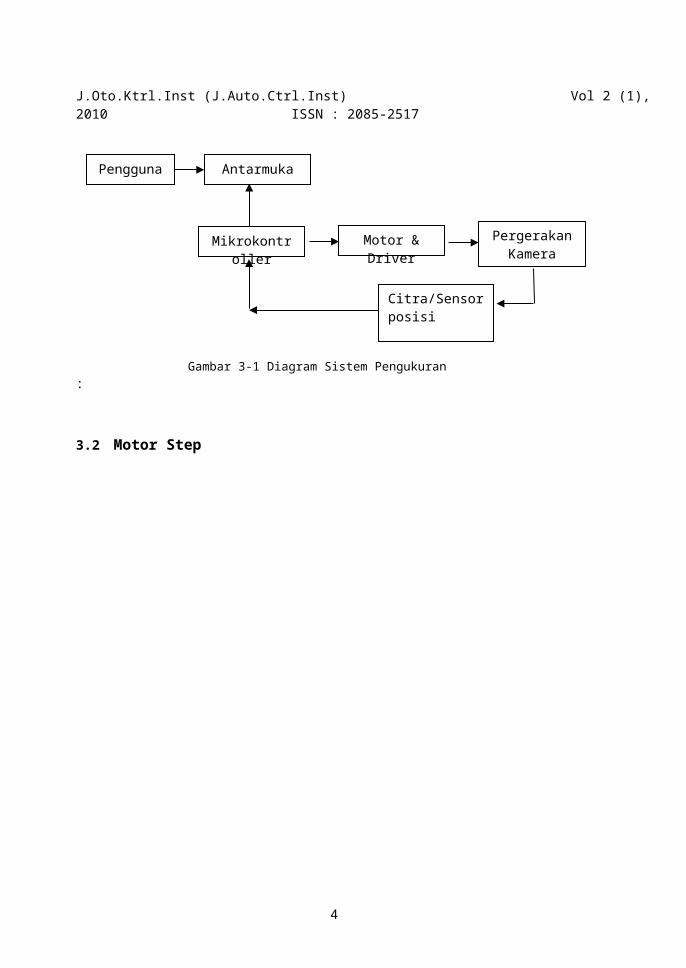
Motor step adalah perangkat mekanik elektrik, yang mengkonversipulsa listrik menjadi gerak putaran diskrit (gerak patah-patah).Motor step dapat berputar dengan langkah tetap dengan besarsudut tertentu. Besarnya sudut untuk tiap langkah bervariasiantara 0,9º hingga 90º. Motor step digunakan pada aplikasi yangmemerlukan perputaran pada sudut tertentu namun tidak memerlukanumpan balik dari sensor posisi. Sudut perpindahan dapatdiketahui dengan menghitung jumlah langkah yang dilakukan dalamsatu putaran[3]. Berdasarkan konstruksinya motor step dapat
dibedakan menjadi dua yaitu motor step magnet permanen dan motorstep reluktansi variable. Konstruksi dasar dari suatu motor stepdalam hal ini jenis magnet permanen, yang terdiri dari rotorberupa magnet permanen dan stator berupa elektromagnetditunjukkan pada Gambar 3-1.
3.3 Antar muka (Graphical User Interface, GUI)Antar muka merupakan perangkat yang mempermudah interaksi antarakomputer dengan pengguna untuk meningkatkan kinerja danproduktivitas penggunanya. Pembuatan antar muka menggunakanperangkat lunak Visual Basic. Visual Basic (VB) adalah salahsatu alat untuk membangun aplikasi di platform Windows. Dalampengembangan aplikasi, VB menggunakan pendekatan visual untukmerancang user interface dalam bentuk form, sedangkan untukpemrogramannya menggunakan bahasa Basic.
Gambar 3-2 Komponen Motor Step
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
3.4 Mikrokontroler
Mikrokontroler merupakan keseluruhan sistem komputer yang dibuatdalam satu chip atau disebut juga mikrokomputer yang terdiridari komponen utama komputer (CPU, RAM(Random Acces Memory),ROM(Read Only Memory), Port I/O) yang dikemas berupa IC digunakanuntuk tujuan tertentu[7].
Mikrokontroler yang digunakan pada proyek ini adalah ArduinoUNO. Mikrokontroler Arduino adalah mikrokontroller single-boardyang bersifat open source[6]. Selain itu mikrokontroler Arduinodipilih karena bahasa dalam Arduino yang relatif mudah dantersedia bootloader untuk mengupload program dari komputer. Dalamproyek ini mikrokontroler Arduino akan menggerakkan motor stepdengan memberikan kombinasi input sinyal digital yaitu High (1)atau Low (0) pada driver untuk mengaktifkan kumparan pada motorstep yang akan membuat pergerakan motor step secara clockwise ataucounterclockwise.
3.5 Motor Driver IC L 293D
Motor driver yang digunakan sebagai pengontrol motor step padaproyek akhir ini adalah IC L 293 D. IC L 293D terdiri 16 pinberupa input, output, vcc, ground, dan enable. Motor driver inimenggunakan rangkaian H-Bridge dua pasang yang masing-masingdikendalikan oleh dua enable. Pin enable berfungsi untukmengaktifkan motor yang menerima sinyal dari keluaran PWM padamikrokontroler. Pin input digunakan untuk input logika yang
6
Gambar 3-3 MikrokontrolerArduino
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
mengatur putaran motor. Vcc pin 8 merupakan sumber teganganuntuk motor sedangkan Vcc pada pin 16 untuk sumber tegangan IC.
3.6 Pengolahan Citra Digital
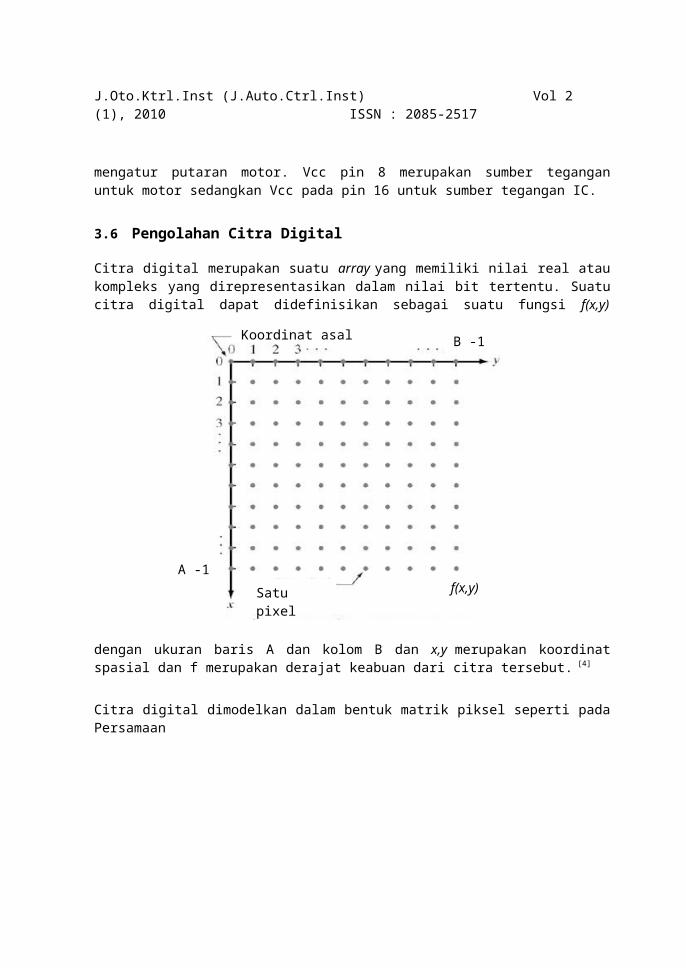
Citra digital merupakan suatu array yang memiliki nilai real ataukompleks yang direpresentasikan dalam nilai bit tertentu. Suatucitra digital dapat didefinisikan sebagai suatu fungsi f(x,y)
dengan ukuran baris A dan kolom B dan x,y merupakan koordinatspasial dan f merupakan derajat keabuan dari citra tersebut. [4]
Citra digital dimodelkan dalam bentuk matrik piksel seperti padaPersamaan
Koordinat asal
A -1
B -1
Satu pixel
f(x,y)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
f(x,y)=[ f(0,0) f(0,1 ) f(0,2) ⋯ f(0,B−1)f(1,0) f(1,1 ) f(1,2) ⋯ f(1,B−1)
⋮ ⋮ ⋮ ⋮ ⋮f(A−1,0) f(A−1,1 ) ⋯ ⋯ f(A−1,B−1)
](1)
Piksel merupakan irisan baris dan kolom. Posisi x,y pikseldisebut juga dengan picture element, atau pels
3.7 Analisis Citra Digital
Pada projek ini dilakukan objek tracking yang merupakan teknikuntuk melacak atau mendeteksi suatu objek yang diinginkan.Metode yang digunakan dalam pelaksanaannya adalah operasideteksi tepi dan garis dan segmentasi warna.
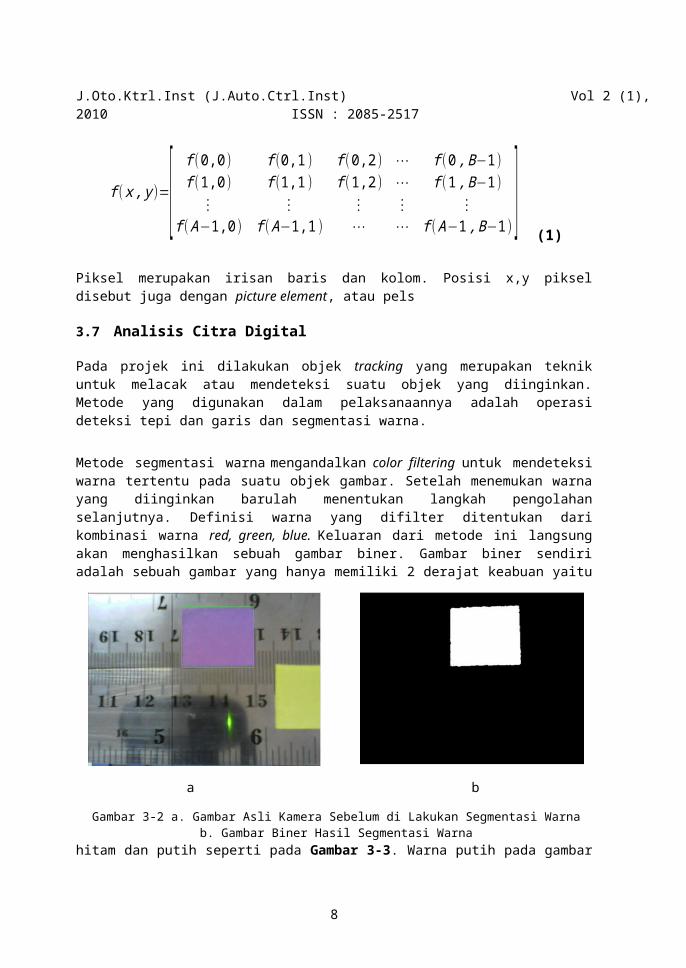
Metode segmentasi warna mengandalkan color filtering untuk mendeteksiwarna tertentu pada suatu objek gambar. Setelah menemukan warnayang diinginkan barulah menentukan langkah pengolahanselanjutnya. Definisi warna yang difilter ditentukan darikombinasi warna red, green, blue. Keluaran dari metode ini langsungakan menghasilkan sebuah gambar biner. Gambar biner sendiriadalah sebuah gambar yang hanya memiliki 2 derajat keabuan yaitu
hitam dan putih seperti pada Gambar 3-3. Warna putih pada gambar
8
a b
Gambar 3-2 a. Gambar Asli Kamera Sebelum di Lakukan Segmentasi Warnab. Gambar Biner Hasil Segmentasi Warna
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
adalah merupakan representasi dari sebuah piksel yang warnanyadiloloskan. Sedangkan warna hitam pada gambar merupakanrepresentasi dari piksel yang warnanya tidak diloloskan.
4 Rancangan Alat dan Implementasi
4.1 Perancangan Sistem Purwarupa Dudukan KameraSecara garis besar alat terdiri dari hardware dan software.Hardware berkaitan dengan kerja mekanik alat dan softwareberkaitan dengan pemrosesan gambar yang ditangkap. Alat bekerjadengan cara dikontrol melalui antarmuka komputer yang mengaksesmikrokontroler Arduino untuk memposisikan kamera pada titik uji.Kamera selanjutnya menangkap gambar titik uji yang kemudiandiproses. Pada sistem otomasi ini digunakan motor step. Motorstep digunakan untuk menggerakan kamera ke posisi yangdiinginkan. Posisi tersebut ditentukan oleh hasil pembacaancitra gambar dari webcam yang terpasang pada dudukan kamera.Kamera bergerak pada lintasan yang telah dirancang sehinggamemungkinkan untuk melakukan gerak empat arah. Berikut tahapanprinsip kerja alat :
- Pergerakan kamera dipicu oleh pengguna yang mengkoneksikanantara komputer dan mikrokontroller secara manual denganmemberikan input pulsa melalui button pada program VisualBasic. Hal ini dilakukan dengan menekan button arah.
- Sinyal dari button yang masuk ke mikrokontroler kemudiandieksekusi. Mikrokontroler memasok tegangan untukpenggerak motor step berupa tegangan DC 5 volt.
- Motor bergerak pada lintasan.- Kamera akan menangkap gambar dan mengirim citra gambar ke
processor komputer. Kemudian dari citra kamera yang dikirimke komputer gambarnya diolah sehingga diperoleh gambaryang diinginkan. Dari gambar tersebut diperoleh koordinatpiksel (x,y) sudut gambar. Hasil pengolahan tersebut akanmenghasilkan set point untuk menghentikan pergerakan pada
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
posisi yang diinginkan. Dari ujung ke ujung diukurkoordinat pikselnya kemudian dikonversi menjadi jarak.
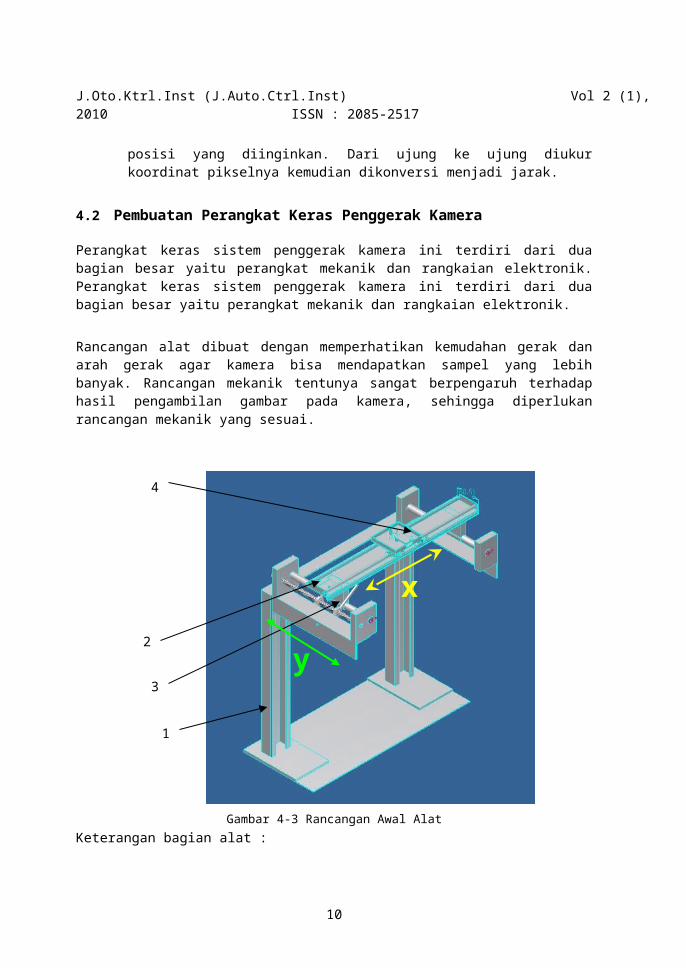
4.2 Pembuatan Perangkat Keras Penggerak Kamera
Perangkat keras sistem penggerak kamera ini terdiri dari duabagian besar yaitu perangkat mekanik dan rangkaian elektronik.Perangkat keras sistem penggerak kamera ini terdiri dari duabagian besar yaitu perangkat mekanik dan rangkaian elektronik.
Rancangan alat dibuat dengan memperhatikan kemudahan gerak danarah gerak agar kamera bisa mendapatkan sampel yang lebihbanyak. Rancangan mekanik tentunya sangat berpengaruh terhadaphasil pengambilan gambar pada kamera, sehingga diperlukanrancangan mekanik yang sesuai.
Keterangan bagian alat :
10
y
1
2
3
4
x
Gambar 4-3 Rancangan Awal Alat
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
1. Kerangka penyangga2. Shaft lintasan
3. Mur dan baut4. Dudukan kamera
Konstruksi di atas memungkinkan untuk membuat gerakan empat arahdengan pengontrol semi otomatis. Penggunaan motor step jugamemungkinkan untuk mengatur laju putaran serta jumlah step yangdiberikan, dan ketika motor berhenti otomatis dudukan akanberhenti seketika.Rangkaian elektronik pada projek akhir ini terdiri darimikrokontroler, driver dan motor. Motor yang digunakan membutuhkandaya 5 V sehingga input langsung diberikan melaluimikrokontroler. Untuk menggerakkan motor juga dibutuhkan ICL293d sebagai Motor Driver. Pada rangkaian ini mikrokontrolerterhubung ke IC sebagai input kemudian dari IC langsung terhubungke motor.
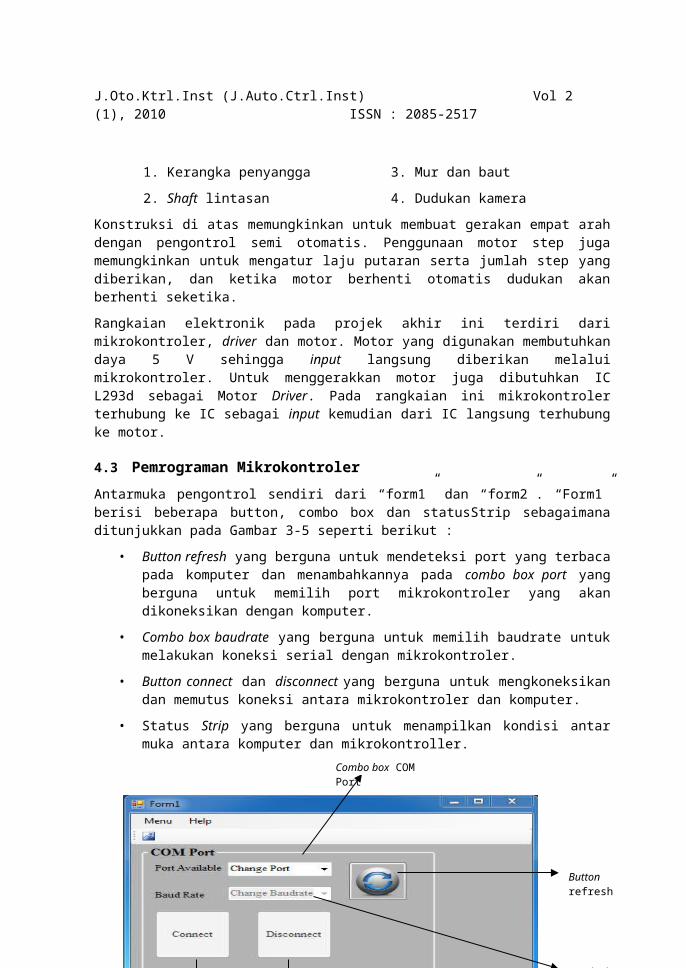
4.3 Pemrograman MikrokontrolerAntarmuka pengontrol sendiri dari “form1” dan “form2”. “Form1”berisi beberapa button, combo box dan statusStrip sebagaimanaditunjukkan pada Gambar 3-5 seperti berikut :
• Button refresh yang berguna untuk mendeteksi port yang terbacapada komputer dan menambahkannya pada combo box port yangberguna untuk memilih port mikrokontroler yang akandikoneksikan dengan komputer.
• Combo box baudrate yang berguna untuk memilih baudrate untukmelakukan koneksi serial dengan mikrokontroler.
• Button connect dan disconnect yang berguna untuk mengkoneksikandan memutus koneksi antara mikrokontroler dan komputer.
• Status Strip yang berguna untuk menampilkan kondisi antarmuka antara komputer dan mikrokontroller.
Combo box BaudRate
Button refresh
Combo box COM Port
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
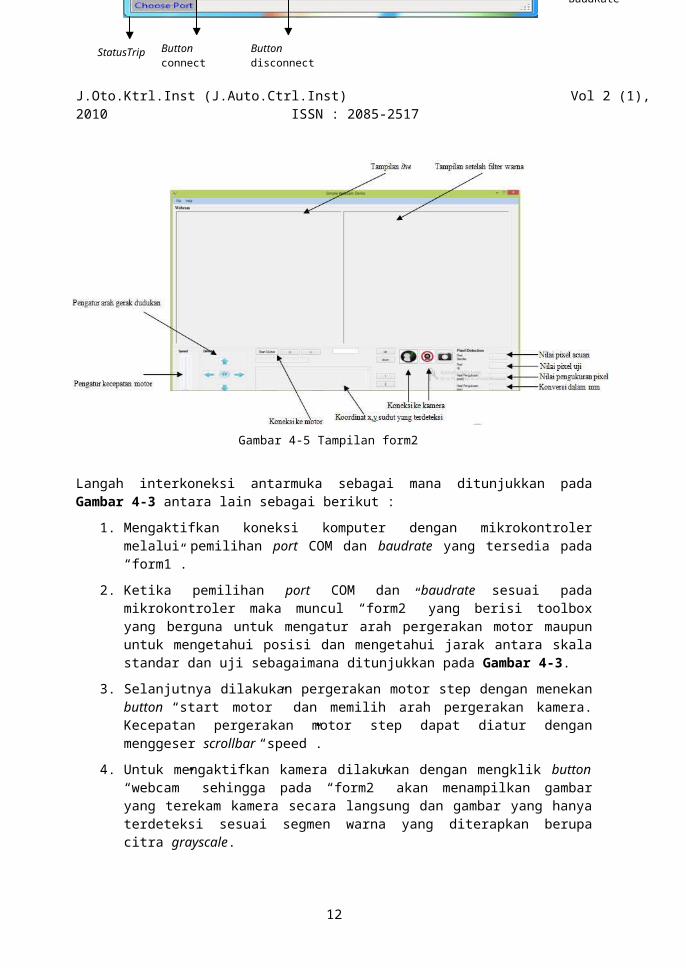
Langah interkoneksi antarmuka sebagai mana ditunjukkan padaGambar 4-3 antara lain sebagai berikut :
1. Mengaktifkan koneksi komputer dengan mikrokontrolermelalui pemilihan port COM dan baudrate yang tersedia pada“form1”.
2. Ketika pemilihan port COM dan baudrate sesuai padamikrokontroler maka muncul “form2” yang berisi toolboxyang berguna untuk mengatur arah pergerakan motor maupununtuk mengetahui posisi dan mengetahui jarak antara skalastandar dan uji sebagaimana ditunjukkan pada Gambar 4-3.
3. Selanjutnya dilakukan pergerakan motor step dengan menekanbutton “start motor” dan memilih arah pergerakan kamera.Kecepatan pergerakan motor step dapat diatur denganmenggeser scrollbar “speed”.
4. Untuk mengaktifkan kamera dilakukan dengan mengklik button“webcam” sehingga pada “form2” akan menampilkan gambaryang terekam kamera secara langsung dan gambar yang hanyaterdeteksi sesuai segmen warna yang diterapkan berupacitra grayscale.
12
Gambar 4-5 Tampilan form2
Combo box BaudRate
Button connect
Button disconnect
StatusTrip
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
5. Button kiri dan kanan digunakan untuk memposisikan garisbantu vertikal pada tampilan kamera secara live.
6. Motor step akan bergerak dan mendeteksi adanya objekpenanda standar yang berupa rectangle dan menampilkan keempatkoordinat titik ujung rectangle tersebut pada textboxt “x,y”.
7. Posisi garis bantu berperan terhadap posisi pandangankamera dalam mendeteksi objek. Ketika posisi garis bantuberhimpit dengan titik ujung rectangle (X3), maka komputerakan memberikan input pulsa ke mikrokontroler untukmemberhentikan motor step. Ketika motor step berhenti akanmenunjukkan deteksi yang lebih stabil dibandingkan denganketika bergerak.
8. Komputer selanjutnya mendeteksi obyek penanda skala ujiyang juga berupa rectangle dan menampilan keempat koordinattitik ujungnya pada textbox “x,y”.
9. Selanjutnya koordinat salah satu titik ujung rectangle yangdiletakkan berhimpit dengan skala uji (X0) ditampilkan padasebuah textbox “Posisi2” dan menyimpannya ke dalam suatuvariabel “Posisi2”.
10. Setelah variabel tersebut tersimpan selanjutnyamenekan button “1” untuk mendeteksi koordinat titik ujungskala yang standar yang dihimpitkan dengan skala padamistar dalam hal ini diperoleh koordinat (X3) dan disimpandalam variabel “Posisi1”. Selisih koordinat variabel“Posisi1” dan “Posisi2” menunjukkan jarak antara skalastandar dan uji yang dinyatakan dalam satuan piksel.
4.4 Pemrosesan Gambar dan Proses PengukuranPada perancangan program citra digital RGB diubah menjadi HSVkarena rentang RGB sangat luas, sedangkan dalam HSV nilai warnaberdasarkan Hue dibatasi dari 0-180. Dalam menentukan penandayang akan dikenali, diberikan rentang minimum dan maksimum nilaiHSV agar dapat memfilter citra objek yang spesifik yang sesuaidengan penanda yang diinginkan.Kemudian hasil citra HSV tersebut ditampilkan dengan format grayscale untuk memastikan bentuk (contour) objek yang akan dideteksi.
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
Dalam tampilan gray scale sesuai nilai rentang HSV, akan diperolehtampilan yang sesuai dengan contour objek. Pada tampilan gray scale ,objek yang sesuai dengan rentang nilai HSV yang ditentukan akanberwarna putih dan background ataupun objek lain yang tidakspesifik dengan rentang HSV yang ditentukan akan berwarna gelap(hitam).Setelah diperoleh contour yang sesuai dengan objek, maka luas areaobjek yang terdeteksi dibatasi untuk mencegah terdeteksinyaobjek yang berwarna serupa dengan objek yang ingin dideteksi.Luas area objek sebanding dengan jumlah piksel dalam objek yangterdeteksi. Selanjutnya dicari titik sudut kontur tersebut. Contour yang terdeteksi hanya yang berbentuk rectangle sehinggatitik pada rectangle harus ada empat. Setelah menemukan titikujung pada objek tersebut untuk memastikan bahwa contour tersebutadalah benar-benar berupa rectangle, maka diberikan batas nilaisudut antar tepi-tepi objek. Jika sudut antar tepi-tepi objekkurang dari 80 derajat atau lebih dari 100 derajat, maka objekdianggap bukan rectangle. Setelah didapat suatu objek rectangleberdasarkan kondisi-kondisi diatas, selanjutnya adalahmendeteksi penanda skala standar yang akan disimpan keempatkoordinat point-nya dalam objek rectangle yang telah terdeteksi.Untuk mendeteksi penanda skala uji digunakan penanda denganwarna yang berbeda jauh dari warna penanda skala standar. Dengandemikian, rentang HSV untuk penanda skala uji juga berbedasehingga perbedaan rentang HSV tersebut yang juga digunakanuntuk membedakan antara skala standar dan uji.Untuk menggerakkan motor, pada program dibuat suatu logika agarmotor step bergerak bila ada pulsa sebagai akibat penekanan padabutton arah. Motor step akan bergerak ke arah sesuai denganpenekanan button arah yang ditekan pengguna. Selanjutnya, kameraberjalan dan mendeteksi objek yang dimaksud. Ketika kameramenangkap koordinat garis bantu berhimpit dengan koordinat salahsatu point rectangle skala standar (X3), motor step akan berhenti. Untuk memastikan kebenaran koordinat antara garis bantu danpoint dari penanda rectangle, skala standar yang terdeteksi (X3)yang diperoleh dibandingkan dengan hasil pembacaan darihistogramBox yang tersedia dalam library OpenCv. Pembandingan
14
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
kebenaran dilakukan dengan meletakkan posisi mouse di ataskoordinat dari objek piksel yang diinginkan. Sehingga, deteksikesalahan penentuan koordinat, baik untuk garis bantu ataupunobjek yang ingin dideteksi lebih mudah. Saat semua kondisialgoritma pemrograman terpenuhi, program kemudian mendeteksipenanda skala uji dan mengambil koordinat titik ujung salah satuyang berhimpit dengan tepi skala mistar. Dari koordinat antarapenanda skala standar dan penanda skala uji akan diketahuiselisih koordinatnya yang kemudian dikonversi dalam skala (mm).
5 Data Dan AnalisisAlat yang dibuat berfungsi untuk mengukur pembacaan jarak duaskala berdasarkan citra yang ditangkap pada kamera untukmemperoleh hasil pembacaan citra digital yang berupa nilaipiksel menjadi nilai dalam satuan panjang (milimeter) denganbeberapa pengujian sebagai berikut :
• Dilakukan pengujian membandingkan jumlah piksel denganjarak sebenarnya secara manual. Selanjutnya daripembandingan tersebut diperoleh persamaan untukmengkonversi hasil selisih piksel.
• Untuk mengetahui karakteristik statik pengukuran dilakukanpengujian histerisis, linieritas, akurasi, danpresisi.List the nomenclature in alphabetical order.
5.1 Konversi Jumlah Pixel Menjadi Jarak (mm)Pengujian pertama dilakukan secara manual dengan caramembandingkan nilai piksel yang tertangkap pada kamera denganskala mistar yang berfungsi sebagai skala standar. Adapunlangkah kerjanya sebagai berikut :
1. Kamera dalam posisi diam2. Mistar diletakkan di depan kamera3. Komputer menjalankan aplikasi4. Selanjutnya pada tampilan kamera tampak garis bantu yang
dapat digeser posisinya seperti yang ditunjukkan padaGambar 5-1
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
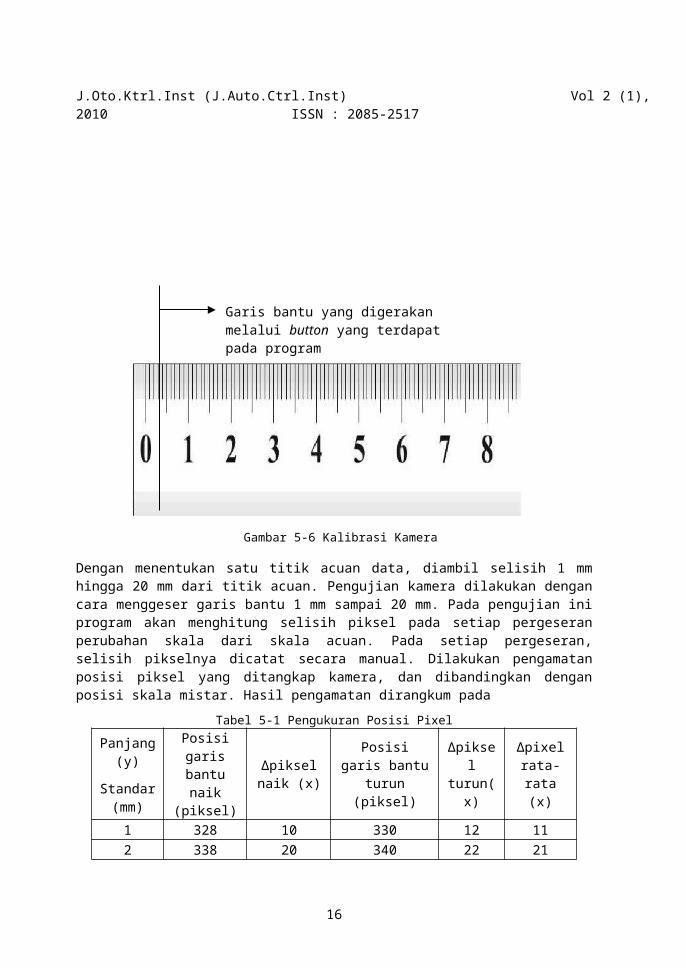
Dengan menentukan satu titik acuan data, diambil selisih 1 mmhingga 20 mm dari titik acuan. Pengujian kamera dilakukan dengancara menggeser garis bantu 1 mm sampai 20 mm. Pada pengujian iniprogram akan menghitung selisih piksel pada setiap pergeseranperubahan skala dari skala acuan. Pada setiap pergeseran,selisih pikselnya dicatat secara manual. Dilakukan pengamatanposisi piksel yang ditangkap kamera, dan dibandingkan denganposisi skala mistar. Hasil pengamatan dirangkum pada
Tabel 5-1 Pengukuran Posisi PixelPanjang(y)
Posisigarisbantunaik
(piksel)
∆pikselnaik (x)
Posisigaris bantu
turun(piksel)
∆piksel
turun(x)
∆pixelrata-rata(x)
Standar(mm)1 328 10 330 12 112 338 20 340 22 21
16
Garis bantu yang digerakan melalui button yang terdapat pada program
Gambar 5-6 Kalibrasi Kamera
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
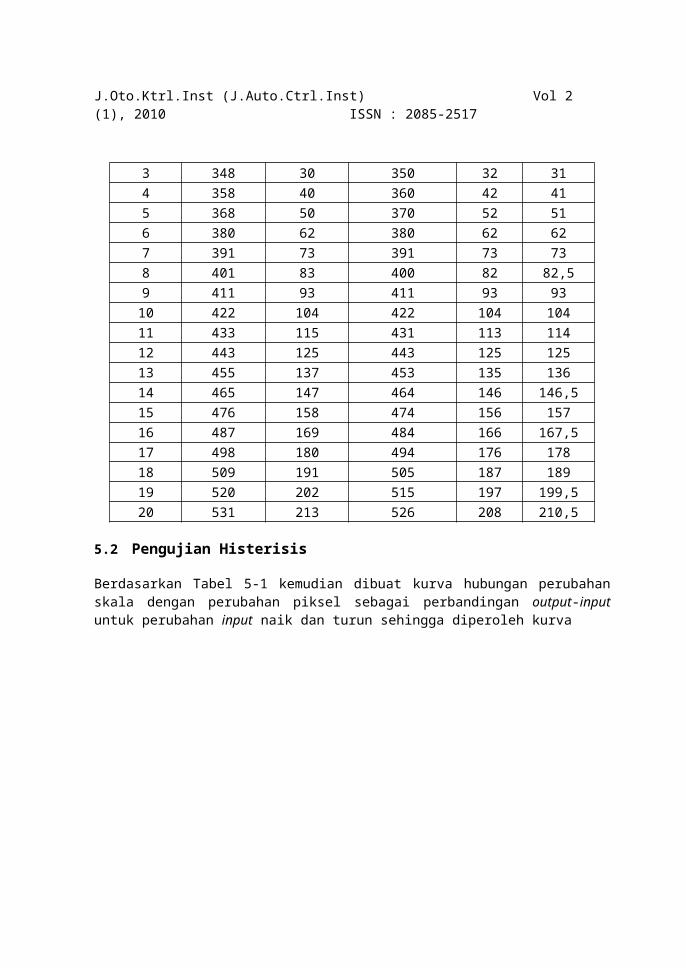
3 348 30 350 32 314 358 40 360 42 415 368 50 370 52 516 380 62 380 62 627 391 73 391 73 738 401 83 400 82 82,59 411 93 411 93 9310 422 104 422 104 10411 433 115 431 113 11412 443 125 443 125 12513 455 137 453 135 13614 465 147 464 146 146,515 476 158 474 156 15716 487 169 484 166 167,517 498 180 494 176 17818 509 191 505 187 18919 520 202 515 197 199,520 531 213 526 208 210,5
5.2 Pengujian Histerisis
Berdasarkan Tabel 5-1 kemudian dibuat kurva hubungan perubahanskala dengan perubahan piksel sebagai perbandingan output-inputuntuk perubahan input naik dan turun sehingga diperoleh kurva
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
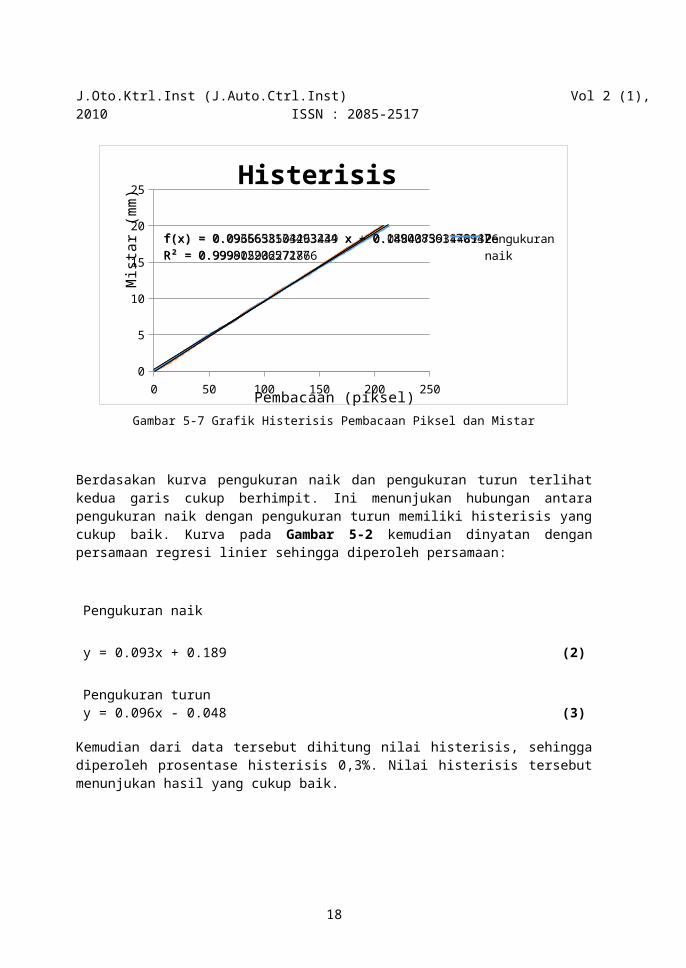
Berdasakan kurva pengukuran naik dan pengukuran turun terlihatkedua garis cukup berhimpit. Ini menunjukan hubungan antarapengukuran naik dengan pengukuran turun memiliki histerisis yangcukup baik. Kurva pada Gambar 5-2 kemudian dinyatan denganpersamaan regresi linier sehingga diperoleh persamaan:
Pengukuran naik
y = 0.093x + 0.189 (2)
Pengukuran turuny = 0.096x - 0.048 (3)
Kemudian dari data tersebut dihitung nilai histerisis, sehinggadiperoleh prosentase histerisis 0,3%. Nilai histerisis tersebutmenunjukan hasil yang cukup baik.
18
Gambar 5-7 Grafik Histerisis Pembacaan Piksel dan Mistar
0 50 100 150 200 2500
5
10
15
20
25
f(x) = 0.0966638503263449 x − 0.0484373934481326R² = 0.999905932271866f(x) = 0.0935653134493234 x + 0.189008561170947R² = 0.99981220657277
Pengukuran naik
HisterisisMi
star
(mm
)
Pembacaan (piksel)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
5.3 Pengujian Linieritas
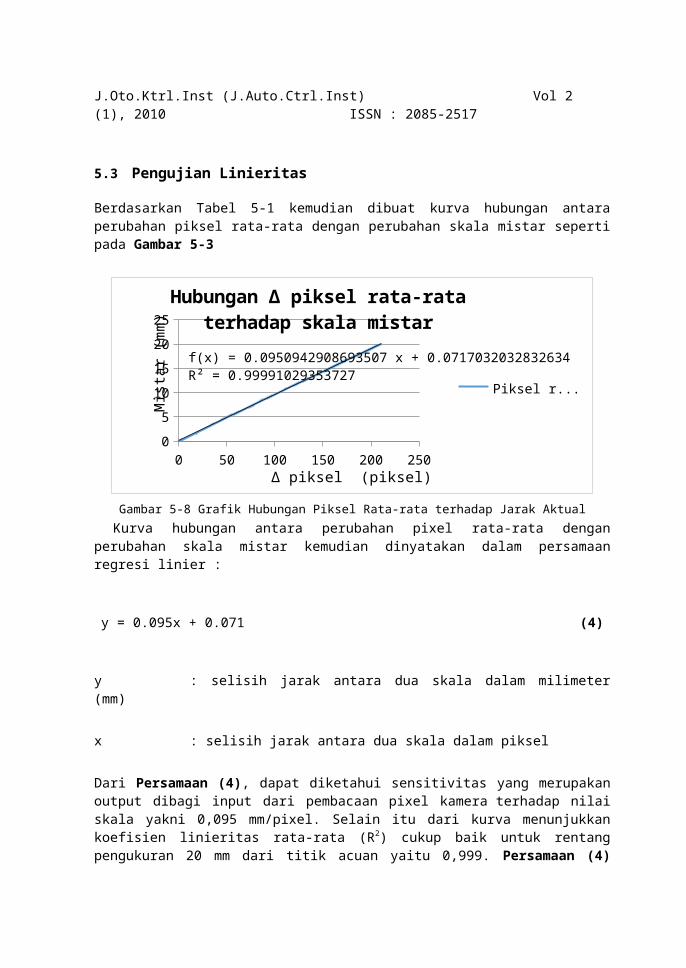
Berdasarkan Tabel 5-1 kemudian dibuat kurva hubungan antaraperubahan piksel rata-rata dengan perubahan skala mistar sepertipada Gambar 5-3
Kurva hubungan antara perubahan pixel rata-rata denganperubahan skala mistar kemudian dinyatakan dalam persamaanregresi linier :
y = 0.095x + 0.071 (4)
y : selisih jarak antara dua skala dalam milimeter(mm)
x : selisih jarak antara dua skala dalam piksel
Dari Persamaan (4), dapat diketahui sensitivitas yang merupakanoutput dibagi input dari pembacaan pixel kamera terhadap nilaiskala yakni 0,095 mm/pixel. Selain itu dari kurva menunjukkankoefisien linieritas rata-rata (R2) cukup baik untuk rentangpengukuran 20 mm dari titik acuan yaitu 0,999. Persamaan (4)
Gambar 5-8 Grafik Hubungan Piksel Rata-rata terhadap Jarak Aktual
0 50 100 150 200 2500510152025
f(x) = 0.0950942908693507 x + 0.0717032032832634R² = 0.99991029353727
Hubungan ∆ piksel rata-rata terhadap skala mistar
Piksel r...
Mist
ar (
mm)
∆ piksel (piksel)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
digunakan untuk mengkonversi hasil pembacaan program yang berupaselisih piksel menjadi besaran panjang dalam satuan milimeter.
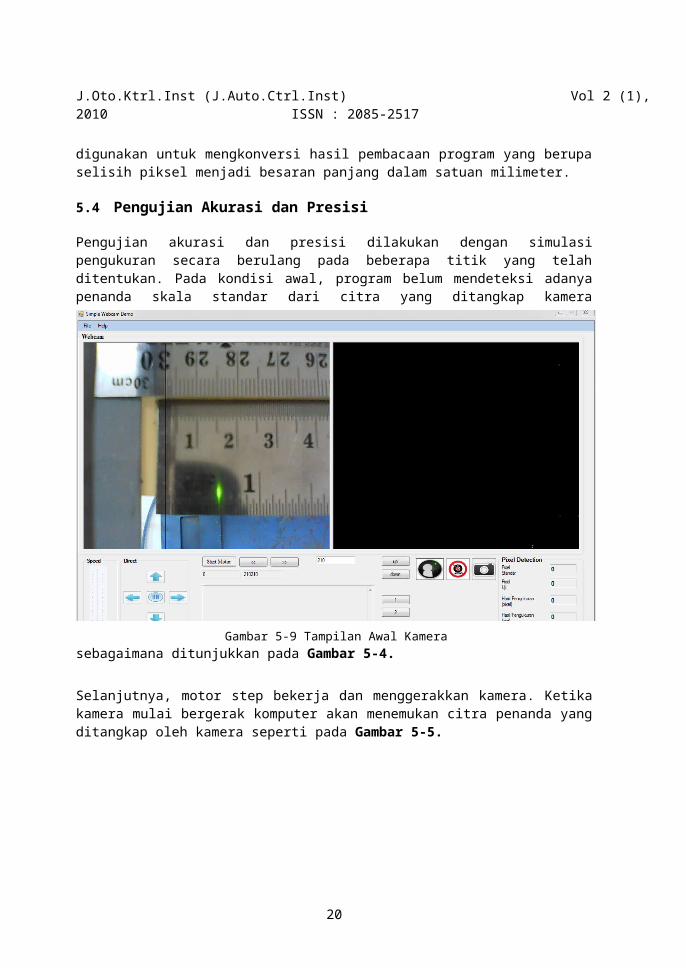
5.4 Pengujian Akurasi dan Presisi
Pengujian akurasi dan presisi dilakukan dengan simulasipengukuran secara berulang pada beberapa titik yang telahditentukan. Pada kondisi awal, program belum mendeteksi adanyapenanda skala standar dari citra yang ditangkap kamera
sebagaimana ditunjukkan pada Gambar 5-4.
Selanjutnya, motor step bekerja dan menggerakkan kamera. Ketikakamera mulai bergerak komputer akan menemukan citra penanda yangditangkap oleh kamera seperti pada Gambar 5-5.
20
Gambar 5-9 Tampilan Awal Kamera
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
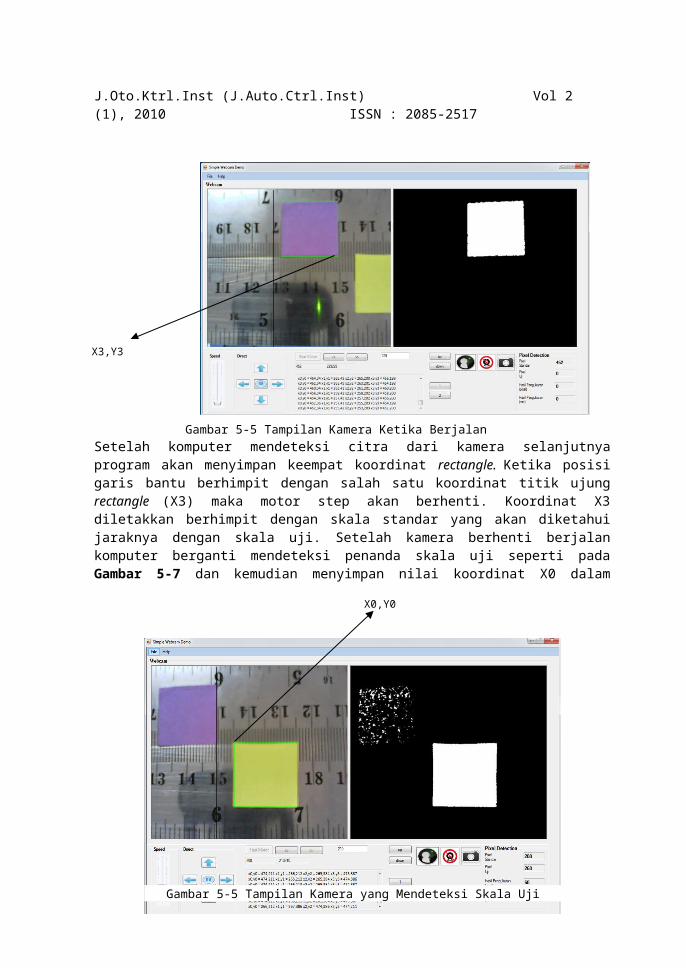
Setelah komputer mendeteksi citra dari kamera selanjutnyaprogram akan menyimpan keempat koordinat rectangle. Ketika posisigaris bantu berhimpit dengan salah satu koordinat titik ujungrectangle (X3) maka motor step akan berhenti. Koordinat X3diletakkan berhimpit dengan skala standar yang akan diketahuijaraknya dengan skala uji. Setelah kamera berhenti berjalankomputer berganti mendeteksi penanda skala uji seperti padaGambar 5-7 dan kemudian menyimpan nilai koordinat X0 dalam
X3,Y3
Gambar 5-5 Tampilan Kamera Ketika Berjalan
X0,Y0
Gambar 5-5 Tampilan Kamera yang Mendeteksi Skala Uji
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1),2010 ISSN : 2085-2517
variabel “Posisi2”. Selanjutnya pengguna menekan button “1”mengetahui koordinat titik acuan dan menyimpan kedalam variabel“Posisi1” .
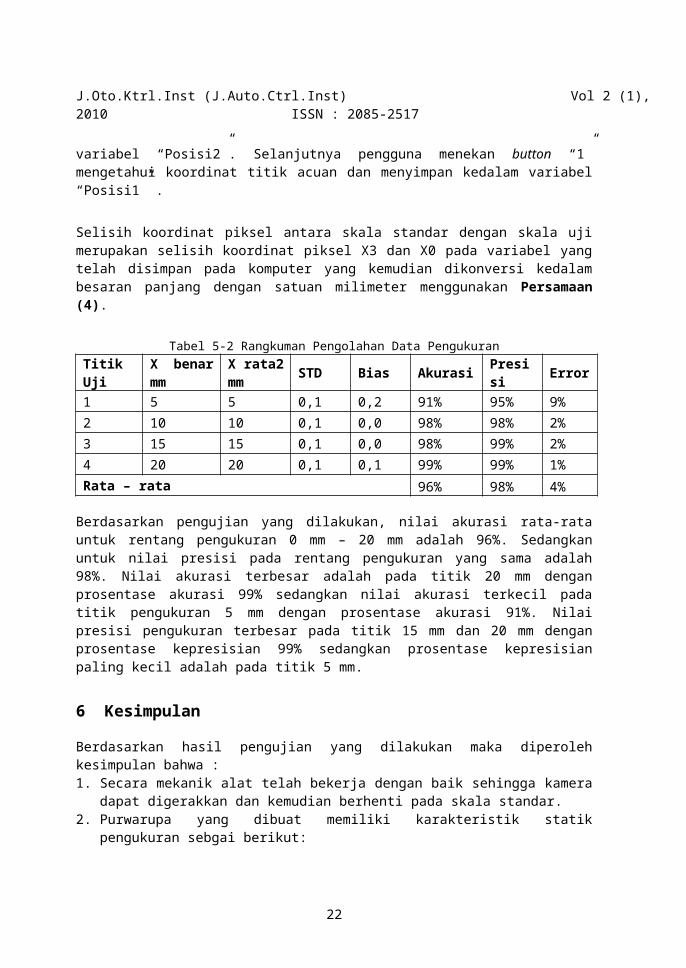
Selisih koordinat piksel antara skala standar dengan skala ujimerupakan selisih koordinat piksel X3 dan X0 pada variabel yangtelah disimpan pada komputer yang kemudian dikonversi kedalambesaran panjang dengan satuan milimeter menggunakan Persamaan(4).
Tabel 5-2 Rangkuman Pengolahan Data PengukuranTitikUji
X benarmm
X rata2mm STD Bias Akurasi Presi
si Error
1 5 5 0,1 0,2 91% 95% 9%2 10 10 0,1 0,0 98% 98% 2%3 15 15 0,1 0,0 98% 99% 2%4 20 20 0,1 0,1 99% 99% 1%Rata – rata 96% 98% 4%
Berdasarkan pengujian yang dilakukan, nilai akurasi rata-ratauntuk rentang pengukuran 0 mm – 20 mm adalah 96%. Sedangkanuntuk nilai presisi pada rentang pengukuran yang sama adalah98%. Nilai akurasi terbesar adalah pada titik 20 mm denganprosentase akurasi 99% sedangkan nilai akurasi terkecil padatitik pengukuran 5 mm dengan prosentase akurasi 91%. Nilaipresisi pengukuran terbesar pada titik 15 mm dan 20 mm denganprosentase kepresisian 99% sedangkan prosentase kepresisianpaling kecil adalah pada titik 5 mm.
6 Kesimpulan
Berdasarkan hasil pengujian yang dilakukan maka diperolehkesimpulan bahwa :1. Secara mekanik alat telah bekerja dengan baik sehingga kamera
dapat digerakkan dan kemudian berhenti pada skala standar.2. Purwarupa yang dibuat memiliki karakteristik statik
pengukuran sebgai berikut:
22
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 2 (1), 2010 ISSN : 2085-2517
Konversi perubahan piksel menjadi panjang diperoleh daripersamaan y = 0,095x – 0,071 dengan y adalah hasilpengukuran jarak, x adalah jumlah perubahan piksel.
Koefisien linieritas (R2) adalah 0,999 dan sensitivitas0,095mm/piksel.
Histerisis untuk pngukuran naik dan turun adalah 0,003.Akurasi rata-rata 96% dan presisi rata-rata 98%.
7 References[1] ISO/IEC Guide 17025:2005[2]OIMLR-35, "Material Measures of Length for General Use", OIML, 1980.[3]Kilian, Christopher. 2000. Modern Control Technology, Components and
Systems. Delmare.[4]Putra, Darma, 2010, Pengolahan Citra Digital, ANDI OFFSET,
Yogyakarta.[5]SK Dirjen PDN No.32 Tahun 2010 tentang Syarat Teknis Alat
Ukur Panjang dan Lampiran[6][Arduino] http://www.arduino.cc/ ( 17 Maret 2014)[7]Nur, Anna. 2010. Penggunaan Microcontroller Sebagai Pendeteksi Posisi
Menggunakan Sinyal GSM. http://www.portalgaruda.org/ ( 17 Maret2014 )
Related Documents











