Sistem Mikrokontroler FE UDINUS 8 Maret 2013 Minggu ke 3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Sistem Mikrokontroler FE UDINUS
8 Maret 2013
Minggu ke 3
2
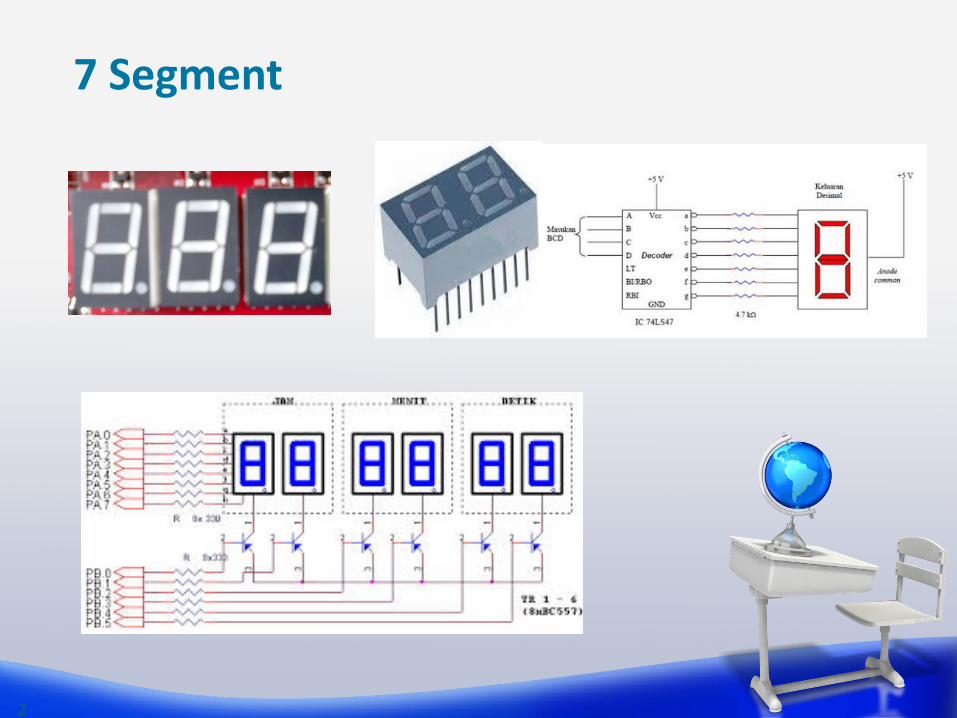
7 Segment

3
4

6
Contoh

PORTA=0x00; DDRA=0xFF;
PORTA=0xFF; DDRA=0xFF;

PORTA=0xFF; Output pada port A akan bernilai “1” PORTA=0x00; Output pada port A akan bernilai “0”
10
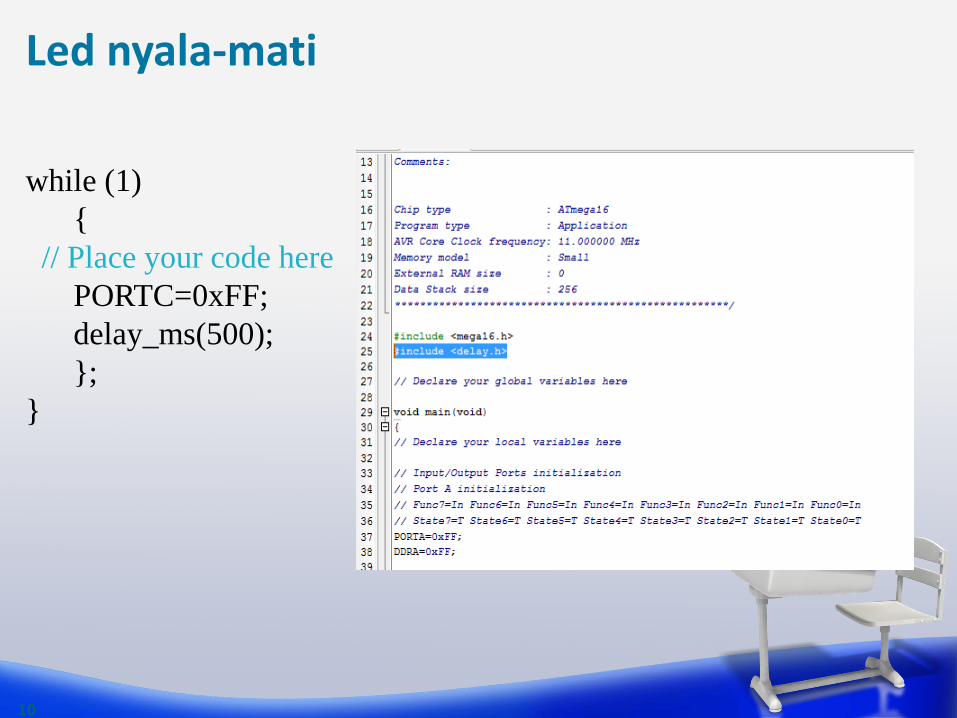
Led nyala-mati
while (1) { // Place your code here PORTC=0xFF; delay_ms(500); }; }
11
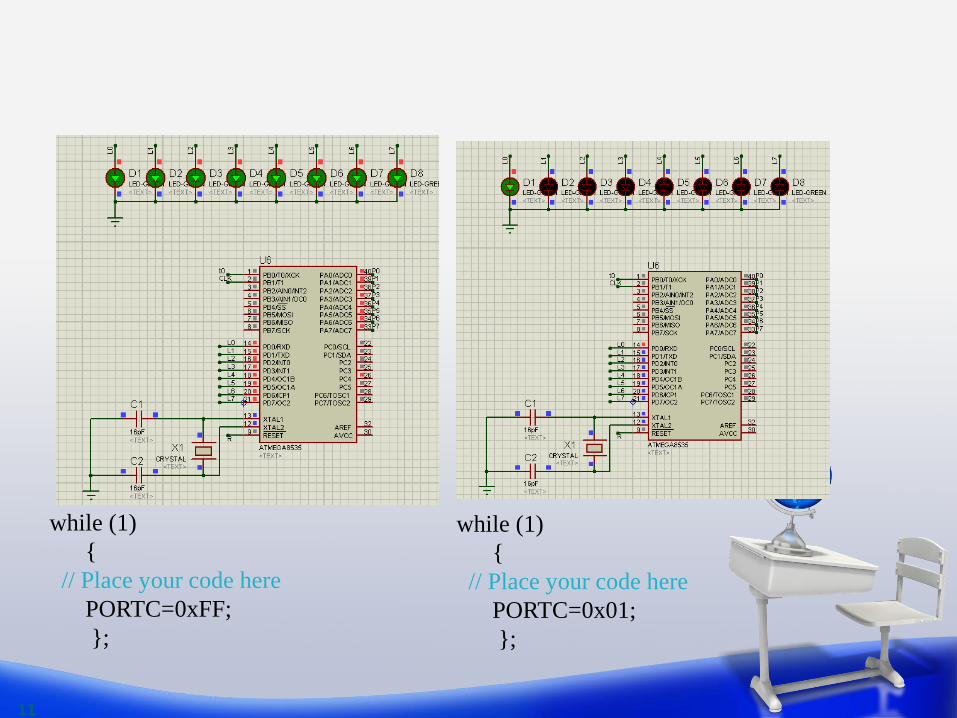
while (1) { // Place your code here PORTC=0xFF; };
while (1) { // Place your code here PORTC=0x01; };
12
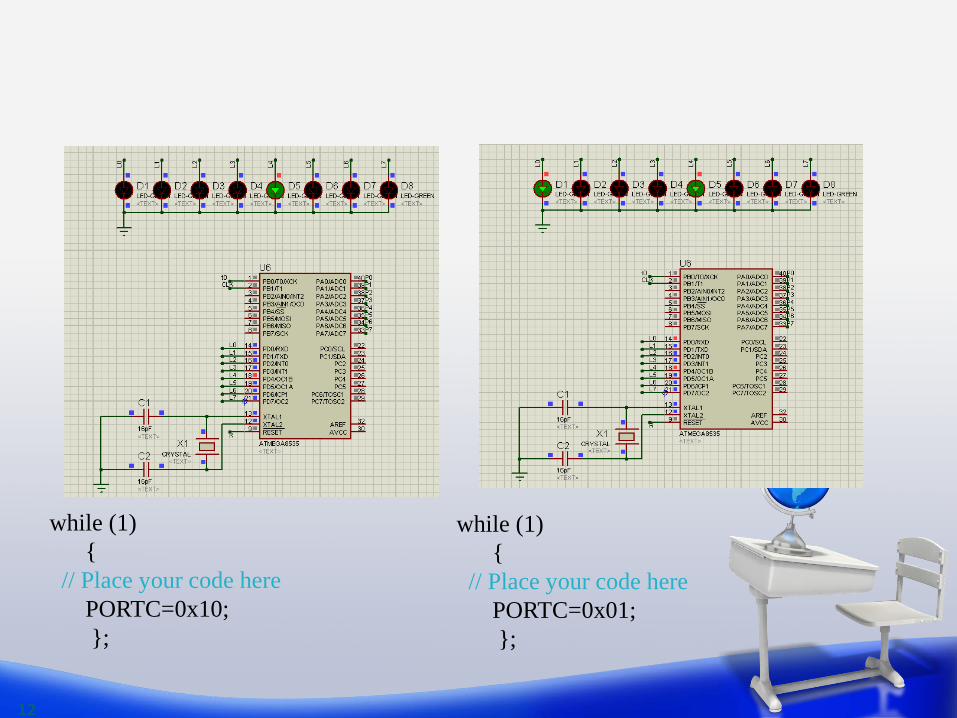
while (1) { // Place your code here PORTC=0x10; };
while (1) { // Place your code here PORTC=0x01; };
13
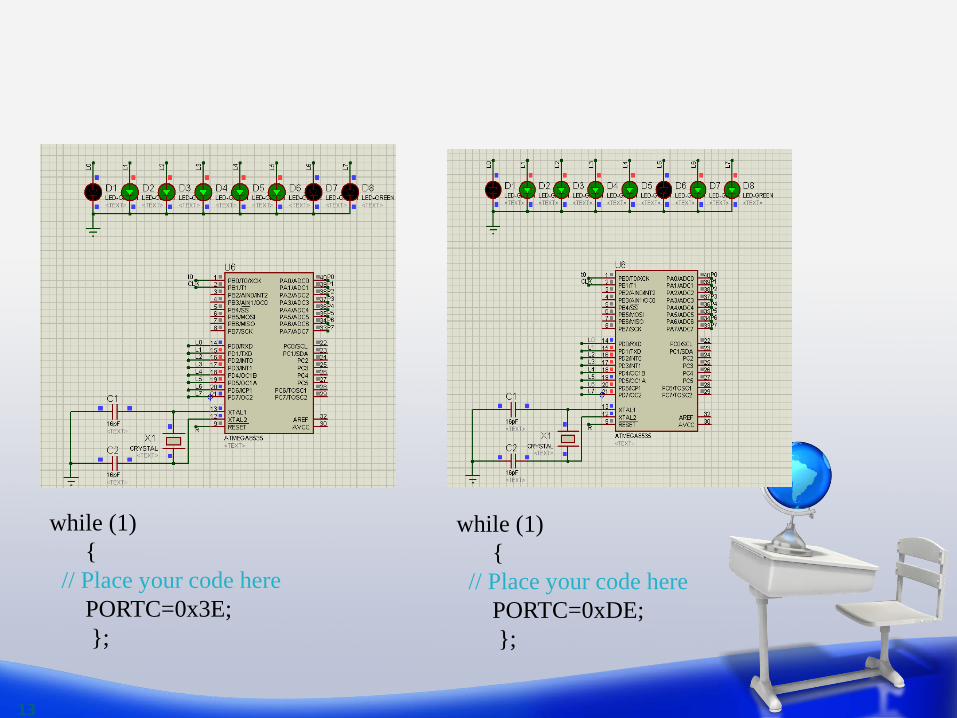
while (1) { // Place your code here PORTC=0x3E; };
while (1) { // Place your code here PORTC=0xDE; };

while (1) { PORTD=0x01; delay_ms(500); PORTD=0x02; delay_ms(500); PORTD=0x04; delay_ms(500); PORTD=0x08; delay_ms(500); PORTD=0x10; delay_ms(500); PORTD=0x20; delay_ms(500); PORTD=0x40; delay_ms(500); PORTD=0x80; delay_ms(500); };
while (1) { PORTD= 1; delay_ms(250); PORTD= 2; delay_ms(250); PORTD= 4; delay_ms(250); PORTD= 8; delay_ms(250); PORTD= 16; delay_ms(250); PORTD= 32; delay_ms(250); PORTD= 64; delay_ms(250); PORTD= 128; delay_ms(250); } };
while (1) { PORTD=0b00000001; delay_ms(100); PORTD=0b00000010; delay_ms(100); PORTD=0b00000100; delay_ms(100); PORTD=0b00001000; delay_ms(100); PORTD=0b00010000; delay_ms(100); PORTD=0b00100000; delay_ms(100); PORTD=0b01000000; delay_ms(100); PORTD=0b10000000; delay_ms(100); };
while (1) { /* if (kanan ==0b00000001) kanan = 0b10000000; // geser kekiri else kanan >>= 1; PORTD = kanan; delay_ms(100); */ if (kanan ==0b00000001) kanan = 0b10000000; //geser kekanan else kiri <<= 1; PORTD = kiri; delay_ms(100); }; }

while (1) { // Place your code here PORTD=PINA; }; }

while (1) { if(PINA.0==1) {PORTD=0x18;} if(PINA.1==1) {PORTD=0XFF;} if(PINA.2==1) {PORTD=0x42;} if(PINA.3==1) {PORTD=0x61;} } }

TERIMA KASIH
18
Related Documents











