Simulation environment for Software Defined Radio with application to Wideband CDMA Master of Science Thesis in Electronic System Design by Weisheng Zhong Stockholm, January 2007 Supervisor: Svante Signell Jinliang Huang Examiner: Svante Signell

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Simulation environment for Software Defined Radio
with application to Wideband CDMA
Master of Science Thesis
in Electronic System Design
by
Weisheng Zhong
Stockholm, January 2007
Supervisor: Svante Signell
Jinliang Huang
Examiner: Svante Signell

ABSTRACT
Software Defined Radio (SDR) switches across various wireless air interfaces by using a
programmable and dynamically reconfigurable method and Wideband Code Division Multiple
Access (WCDMA) is a promising candidate to be adopted into SDR.
We implement WCDMA system in a SDR workbench in Matlab/Octave environment. Two
scenarios are considered in this thesis. In non-adaptive scheme, the Channel State Information
(CSI) is not known at the transmitter side. The signals are transmitted in a fixed rate and
modulation method. In adaptive scheme, the transmitter has complete and accurate knowledge of
the CSI so that adaptive modulation is applied to achieve high data rate transmission under a target
BER. The performance of WCDMA is examined in both flat Rayleigh fading and frequency
selective Rayleigh fading channel.
In an attempt to accelerate simulation speed in Matlab/Octave, mixed C++/Matlab and
C++/Octave programming is employed. It turns out that programming using C++/Matlab is more
efficient than the Matlab code only when the size of matrix is not larger than 25; the simulation
speed is slowed down by programming C++/Octave compared to Octave.
ii

Acknowledgments This thesis work was carried out at the School of Information and Communication
Technology (ICT), KTH.
I would like to thank my advisor Prof. Svante Signell for giving me this opportunity and the
valuable guidance and comments. I would also thank my advisor Jinliang Huang for always
offering suggestions and discussions throughout the thesis work.
I also would like to thank my parents for their consistent encouragement and support.
Specially, I want to take the opportunity and express my deepest regards to all my friends for
many great helps with my thesis research and graduate study.
iii

Contents Abstract ............................................................................................................................................ ii Acknowledgments........................................................................................................................... iii Contents ...........................................................................................................................................iv List of Figures ................................................................................................................................ vii List of Tables.................................................................................................................................. vii Abbreviations................................................................................................................................ viii Chapter 1 Introduction ......................................................................................................................1
1.1 WCDMA.......................................................................................................................1 1.2 Programming using Matlab/Octave ..............................................................................1 and C++.....................................................................................................................................1 1.3 Thesis Outline ...............................................................................................................3
Chapter 2 Overview of Previous Work .............................................................................................4
2.1 Introduction to Software Defined Radio .......................................................................4 2.2 3G air interface Fundamentals ......................................................................................4 2.3 Workbench Architecture................................................................................................8
Chapter 3 WCDMA Simulation......................................................................................................10
3.1 Characteristics.............................................................................................................10 3.1.1 Background .....................................................................................................10 3.1.2 Characteristics .................................................................................................10
3.2 Spreading and Despreading.........................................................................................11 3.2.1 Direct Sequence Spread spectrum...................................................................13 3.2.2 Pseudorandom Sequences (Spreading Codes) ................................................15
3.3 Multipath Radio Channel ............................................................................................16 3.4 Rake receiver...............................................................................................................17 3.5 WCDMA Simulation results in SDR-WB...................................................................21
3.5.1 Flat Fading Channel ........................................................................................21 3.5.1.1 Non-Adaptive Scheme .............................................................................21 3.5.1.2 Adaptive Scheme .....................................................................................22
3.5.2 Frequency Selective Fading Channel ..............................................................24 3.5.2.1 Frequency Selective Fading Channel with Non-adaptive Scheme...........25 3.5.2.2 Frequency Selective Fading Channel with Adaptive Scheme ..................26
Chapter 4 Programming using Matlab/Octave and C++.................................................................28
4.1 Introduction.................................................................................................................28 4.1.1 Matlab and Interface Function MEX file ........................................................28 4.1.2 Octave and Interface Function OCT file .........................................................29
iv

4.2 Methodlogy .................................................................................................................30 4.2.1 Performance Analysis......................................................................................30 4.2.2 MEX File Programming..................................................................................32 4.2.3 OCT File Programming...................................................................................32
4.3 Numerical Results .......................................................................................................33 4.3.1 Programming using Matlab and C++..............................................................33 4.3.2 Programming using Octave and C++..............................................................34
4.4 Conclusion ..................................................................................................................36 Chapter 5 Conclusions and Future Work ........................................................................................37
5.1 Conclusions.................................................................................................................37 5.2 Future Work ................................................................................................................37
Appendix A MEX FILE ...............................................................................................................38 Appendix B DLL FILE ................................................................................................................45 Bibliography ...................................................................................................................................49
v

List of Figures 2.1 System block diagram ..........................................................................................................8 2.2 Block diagrams of TX and RX ..............................................................................................9 3.1 Direct Sequence Spread Spectrum .....................................................................................13 3.2 Transmitted signals in DS-CDMA system ..........................................................................13 3.3 Power spectral density of baseband signal and SS signal .................................................14 3.4 Power spectral density of baseband SS signal and Noise ..................................................14 3.5 Power spectral density of baseband SS signal and Interference........................................15 3.6 Block diagram of a generalized feedback shift register with m stages...............................15 3.7 Fast Rayleigh fading as caused by multipath propagation ................................................163.8 A Spread Spectrum System with RAKE receiver ................................................................17 3.9 Rake Receiver Architecture with L branches......................................................................19 3.10 Performance comparation of the three combining methods ..............................................20 3.11 Average BER for BPSK and QPSK over a Rayleigh fading channel .................................22 3.12 Throughput of an adaptive system in a Flat Rayleigh fading channel ...............................23 3.13 Throughput of the adaptive system for different target BER ..............................................24 3.14 BER versus SNR over a frequency selective Rayleigh fading channel ...............................25 3.15 Comparison of BER versus SNR in Flat FC and FS fading channel .................................26 3.16 Throughput of adaptive system in a Frequency Selective fading channel..........................27 3.17 Throughput of the adaptive system for different target BER ..............................................27 4.1 Time spent on the functions ................................................................................................30 4.2 Time spent on the sub-lines ................................................................................................31 4.3 Time spent on the lines .......................................................................................................31 4.4 Time costs in the MATLAB multiplication with large matrix-size ......................................33 4.5 Time costs in the MATLAB multiplication with small matrix-size......................................34 4.6 Time costs in the OCTAVE multiplication with small matrix-size ......................................35 4.7 Time costs in the OCTAVE multiplication with large matrix-size ......................................35
vi

List of Tables 2.1 Main differences between WCDMA and GSM air interfaces...............................................5 2.2 Main differences between WCDMA and IS-95 air interfaces ..............................................6 2.3 A comparison of major physical layer operational parameters of WCDMA, CDMA2000
and TD-SCDMA standards ..................................................................................................7 3.1 Direct Sequence Spread Spectrum Diagram ......................................................................11
vii

Abbreviations 3G 3rd Generation 3GPP 3rd Generation partnership project AWGN Additive white Gaussian noise BER Bit error rate BPSK Binary phase shift keying CDMA Code division multiple access CLPCF Closed loop power control frequency CSI Channel State Information DS-CDMA Direct spread code division multiple access FDD Frequency Division Duplex FDMA Frequency division multiple access GSM Global System for Mobile Communications IID independent and identical distributed. IMT-2000 International mobile telephony, 3rd generation networks are referred
as IMT-2000 within ITU ISI Intersymbol Interference MIMO Multiple-input multiple-output OFDM Orthogonal Frequency Division Multiplexing OVSF Orthogonal variable spreading factor PCBC Pilot channel based coherent PSBC Pilot symbol based coherent QAM Quadrature amplitude modulation QoS Quality of service QPSK Quadrature phase shift keying SNR Signal to noise ratio TDD Time Division Duplex UMTS Universal mobile telecommunication services VSF Variable spreading factor TD-SCDMA Time division synchronous CDMA WCDMA Wideband CDMA, Code division multiple access
viii

Chapter 1
Introduction 1.1 WCDMA
The goal for the next generation of mobile communications system is to seamlessly provide a
wide variety of communication services to anybody, anywhere, anytime. The intended service for
next generation mobile phone users includes services like transmitting high speed data, video and
multimedia traffic as well as voice signals. The technology needed to tackle the challenges to
make these services available is popularly known as the Third Generation (3G) Cellular Systems.
The first generation systems are represented by the analog mobile systems designed to carry the
voice application traffic. The subsequent digital counterparts are known as second generation
cellular systems. Third generation systems mark a significant leap, both in applications and
capacity, from the current second generation standards. Whereas the current digital mobile phone
systems are optimized for voice communications, 3G communicators are oriented towards
multimedia message capability.
Third generation systems are designed for multimedia communication: person to person
communication can be enhanced with high quality images and video, and access to information
and services on public and private networks will be enhanced by the higher data rates and new
flexible communication capabilities of third generation systems. Nowadays, WCDMA technology
has emerged as the most widely adopted third generation air interface [3]. The principles of the
WCDMA will be introduced in detail in Chapter 3.
1.2 PROGRAMMING USING MATLAB/OCTAVE
AND C++
Today software is used to solve complex numerical problems in a wide variety of
1

environments. Therefore the software and the mathematical algorithms need to run on various
inhomogeneous hardware components, employing small specialized mobile devices as well as
high performance mainframes.
Interactive array languages such as Matlab and Octave have proven to be effective
development tools for numerical algorithms. Comparing with conventional languages, such as
C++, many programmers consider that using array languages is easier to prototype algorithms.
The main reason is the interactive nature of the language, which facilitates debugging and
analysis [4]. Another, in these languages it is not necessary to specify the dimension or type of
arrays. Though static typing decreases the probability of programming errors, the practice of
omitting types is a convenient feature to programmers. The third, these languages also offer a rich
set of functions and higher-level operators for matrix manipulation.
At the same time, however, the drawback is that interactive array languages are executed
with interpreters, which often makes programs inefficient. The interpreter is parsing the program,
allocating storage for variables dynamically, and determining at runtime which version of the
operations to invoke. This way type declared, which are omitted in Octave, are set dynamically at
runtime. In fact, most of the execution time is wasted doing work that could be done once before
deploying the software, at compile time.
Because of these downsides, interactive array languages are used only for the prototyping of
algorithms. Later the algorithm is re-implemented in a conventional language, such as C++.
An alternative would be to analyze and translate interactive array languages using the
interface functions to improve the efficient of the simulation environment.
MEX-Files are a way to call our custom C++ routines directly from MATLAB as if they were
MATLAB built-in functions. On Octave, it can also dynamically load and execute functions
written in C++. Octave can only directly call functions written in C++, but we can also load
functions written in other languages by calling them from a simple wrapper function written in
C++ [16]. We discussed the estimation on both of the two systems and a detailed result analysis
will be given in Chapter 4.
2

1.3 THESIS OUTLINE
The introduction of this workbench architecture, which is the basic simulation environment
for SDR is presented in Chapter 2. This architecture is based on the existed simulation
environment, but refined to fit the needs of this thesis.
The brief description of key characteristics of WCDMA system is provided in Chapter 3. In
this Chapter, the physical layer of the WCDMA system is described in detail. The WCDMA
simulation results in SDR-WB are also described in this chapter.
The improvement of the efficiency of the simulation workbench is discussed in Chapter 4.
Both Matlab and Octave have their own interface function of C++ program. We tried to call C
functions from Matlab and Octave in the simulation codes of MIMO-OFDM. The results are
shown and the analysis follows.
Finally Chapter 5 gives a conclusion and directions for further research.
3

Chapter 2
Overview of Previous Work 2.1 INTRODUCTION TO SOFTWARE DEFINED RADIO
Traditional communications systems have typically been implemented using custom
hardware solutions [1]. Even with a single communication system the hardware development
cycle is onerous. While multiple communications systems requirements are considered, both
silicon area and design validation are major inhibitors to commercial success.
Most radios are hardware defined with little or no software control, and they are fixed in
function for mostly consumer items for broadcast reception. They have a short life and are
designed to be discarded and replaced.
Software defined radio (SDR) is an exciting new field for the wireless industry; it is gaining
momentum and beginning to be included in commercial and defense products. The technology
offers the potential to revolutionize the way radios are designed, manufactured, deployed, and
used. SDR promises to increase flexibility, extend hardware lifetime, lower costs, and reduce time
to market [2].
The basic definition of SDR can be summarized like that: SDR is a kind of open system
structure which connects modular and standardized hardware units by way of bus to form a basic
platform and accomplish different wireless communication functions through the software control.
2.2 3G AIR INTERFACE FUNDAMENTALS
Analog cellular systems are commonly referred to as first generation systems. The digital
systems currently in use, such as GSM, PDC, CDMA-One (IS-95) and US-TDMA (IS-136), are
second generation systems. These systems have enabled voice communications to go wireless in
many of the leading markets, and customers are increasingly finding value also in other services,
4

such as text messaging and access to data networks, which are starting to grow rapidly. Now, the
third generation systems have been played an important role in the modern communication. As we
mentioned before, WCDMA technology has emerged as the most widely adopted third generation
air interface.
The main differences between the third and second generation air interfaces are described.
GSM and IS-95 (the standard for CDMA-One systems) are considered as the main second
generation air interfaces here [3].
Table 2.1 lists the main differences between WCDMA and GSM, and Table 2.2 lists the main
differences between WCDMA and IS-95. In this comparison only the air interface is considered.
Table 2.1 Main differences between WCDMA and GSM air interfaces
WCDMA GSM Carrier spacing 5MHz 200kHz Frequency reuse factor 1 1-18 Power control frequency 1500Hz 2Hz or lower Quality control Radio resource management
algorithms Network planning (frequency planning)
Frequency diversity 5MHz bandwidth gives multipath diversity with Rake receiver
Frequency hopping
Packet data Load-based packet scheduling Time slot based scheduling with GPRS
Downlink transmit diversity Supported for improving downlink capacity
Not supported by the standard, but can be applied
The differences in the air interface reflect the new requirements of the third generation
systems. For example, the larger bandwidth of 5 MHz is needed to support higher bit rates.
Transmit diversity is included in WCDMA to improve the downlink capacity to support the
asymmetric capacity requirements between downlink and uplink. Transmit diversity is not
supported by the second generation standards. The mixture of different bit rates, services and
quality requirements in third generation systems requires advanced radio resource management
algorithms to guarantee quality of service and to maximize system throughput. Also, efficient
support of non-real time packet data is important for the new services.
5

Table 2.2 Main differences between WCDMA and IS-95 air interfaces
WCDMA IS-95 Carrier spacing 5 MHz 1.25 MHz Chip rate 3.84 Mcps 1.2288 Mcps Power control frequency 1500 Hz, both uplink and
downlink Uplink: 800 Hz, downlink: slow power control
Base station synchronization Not needed Yes, typically obtained via GPS
Inter-frequency handovers Yes, measurements with slotted mode
Possible, but measurement method not specified
Efficient radio resource Yes, provides required quality of service
Not needed for speech only networks
Packet data Load-based packet scheduling Packet data transmitted as short circuit switched calls
Downlink transmit diversity Supported for improving downlink capacity
Not supported by the standard
The main differences between WCDMA and IS-95 are discussed below. Both WCDMA and
IS-95 utilize direct sequence CDMA. The higher chip rate of 3.84 Mcps in WCDMA enables
higher bit rates. The higher chip rate also provides more multipath diversity than the chip rate of
1.2288 Mcps, especially in small urban cells. Most importantly, increased multipath diversity
improves the coverage. The higher chip rate also gives a higher trunking gain, especially for high
bit rates, than do narrowband second generation systems.
Experiences from second generation air interfaces have been important in the development of
the third generation interface, but there are many differences, as listed above. In order to make the
fullest use of the capabilities of WCDMA, a deep understanding of the WCDMA air interface is
needed, from the physical layer to network planning and performance optimization.
However, an important problem with 3G is that it has added to the number of air interface
standards that needs to be supported by the infrastructure and terminal industry. Of the 3G
standards, the 3GPP Universal Mobile Telecommunications System (UMTS) is unlikely to be
universal and will be strongest in Europe. The 3GPP2 CDMA2000 standard and the TDMA based
GSM-EDGE systems will be successful in North and South America, while Japan has its own
WCDMA system similar to UMTS. The TD-SCDMA standard makes use of TDD synchronous
CDMA technology and offers several operational advantages. This standard has received the full
6

blessing of the Chinese government and will surely play a critical role in mobile communications
development in China as well as in the world.
A comparison of fundamental system parameters of WCDMA, CDMA2000 and
TD-SCDMA standards is given in Table 2.3 [4].
Table 2.3 A comparison of major physical layer operational parameters of W-CDMA, CDMA2000 and TD-SCDMA standards
WCDMA CDMA2000 TD-SCDMA Multiple Access DS-CDMA DS-CDMA/MC-CDMA TDMA/DS-CDMA CLPCF 1600Hz 800 Hz 200Hz Channel coding
Convolutional, RS, or turbo coding
Convolutional or turbo coding
Convolutional or turbo coding
Spreading code OVSF DL:Walsh, UL:M-ary Walsh mapping
OVSF
VSF 4…256 4…256 1…16 Carrier 2 GHz 2 GHz 2 GHz Modulation DL: QPSK, UL: BPSK DL: QPSK, UL: BPSK QPSK,
8-PSK (at 2 Mb/s) Bandwidth 5*2 MHz 1.25*2/3.75*2 MHz 1.6 MHz UL-DL spectrum Paired Paired Unpaired Chip rate 3.84 Mchips/s 1.2288/3.6864 Mchips/s 1.28 Mchip/s
Frame length 10 ms 20 ms, 5 ms 10 ms Interleaving periods
10/20/40/80 ms
5/20/40/80 ms
10/20/40/80 ms
Maximum data rate
2 Mb/s
2.4 Mb/s
2 Mb/s
Detection PCBC PSBC PSBC Inter-BS timing Asynchronous/synchronous Synchronous Synchronous
All of the 3G systems are potential SDR applications. Software radio offers the potential to
solve many of the problems caused by the proliferation of new air interfaces. Base stations and
terminals using SDR architectures can support multiple air interfaces during periods of transition
and be easily software upgraded. Intelligent SDR can detect the local air interface and adapt to suit
the need.
7

2.3 WORKBENCH ARCHITECTURE
In the previous work, we have an existed simulation environment. The workbench consists of
five parts: SOURCE, TX, CH, RX and SINK. These modules realize the most basic functions.
Signals to be transmitted generate inside SOURCE. TX defines the transmitters and RX defines
the receivers. Different channel models were defined in CH module. The Channel State
Information (CSI) can be transmitted from RX to TX through a feedback channel “CH_R”. Finally,
the received signals were demodulated and decoded in SINK module [5]. The system block
diagram is shown in Figure 2.1.
SOURCE TX CH RX SINK
CH_R
Figure 2.1. System block diagram
Inside each module, there are sub-modules that define sub-blocks. The block diagram of TX
and RX are shown in Figure 2.2: where BBU_T/BBU_R are the BaseBand Unit, SPU_T/SPU_R
are the Space Processing Unit, DRU_T/DRU_R are the Digital Radio Unit and ARU_T/ARU_R
are the Analog Radio Unit. The EAU_R is the Estimation and Adaptation Unit. Data bits are
encoded in the BBU_T block, and then fed into SPU_T, where baseband modulation is
accomplished. The outputs of SPU_T are OFDM modulated in DRU_T part if wideband
communication is chosen. More details about the workbench are introduced in [6].
TX
BBU_T SPU_T DRU_T ARU_T
8

RX
ARU_R DRU_R SPU_R BBU_R
EAU_R
Figure 2.2. Block diagrams of TX and RX
In this thesis, we did the physical layer simulation of WCDMA systems based on a SDR
environment. Here we set two m file dsencoder.m and dsdecoder.m in the SPU_T and SPU_R
modules. The function of the two files will be explained in Section 3.3.
9

Chapter 3
WCDMA Simulation This chapter introduces the principles of the WCDMA and analyzes the performance of the
WCDMA system. The main characteristics of the WCDMA are introduced in Section 3.1. The
concept of spreading and despreading is described in Section 3.2, followed by a presentation of
the multipath radio channel in Section 3.3 and Rake receiver in Section 3.4. The WCDMA
simulation results in wideband will be shown in Section 3.5.
3.1 CHARACTERISTICS
3.1.1 Background
One of the most promising approaches to 3G is to combine a Wideband CDMA (WCDMA)
air interface with the fixed network of GSM. Several proposal supporting WCDMA were
submitted to the International Telecommunication Union (ITU) and its International Mobile
Telecommunications for the year 2000 (IMT2000) initiative for 3G.
3.1.2 Characteristics
We present the main system design parameters of WCDMA in this section. Here we highlight
some of the items that characterize WCDMA [3].
WCDMA is a wideband Direct-Sequence Code Division Multiple Access (DS-CDMA)
system, i.e. user information bits are spread over a wide bandwidth by multiplying the user data
with pseudorandom (PN) sequence derived from CDMA spreading codes. In order to support very
high bit rates (up to 2 Mbps), the use of a variable spreading factor and multi-code connections is
supported.
The chip rate of 3.84 Mcps leads to a carrier bandwidth of approximately 5 MHz. DS-CDMA
10

systems with a bandwidth of about 1 MHz, such as IS-95, are commonly referred to as
narrowband CDMA systems. The inherently wide carrier bandwidth of WCDMA supports high
user data rates and also has certain performance benefits, such as increased multipath diversity.
Subject to its operating license, the network operator can deploy multiple 5 MHz carriers to
increase capacity, possibly in the form of hierarchical cell layers.
WCDMA supports highly variable user data rates, in other words the concept of obtaining
bandwidth on demand is well supported. The user data rate is kept constant during each 10 ms
frame. However, the data capacity among the users can change from frame to frame.
WCDMA supports two basic modes of operation: Frequency Division Duplex (FDD) and
Time Division Duplex (TDD). In the FDD mode, separate 5 MHz carrier frequencies are used for
the uplink and downlink respectively, whereas in TDD only one 5 MHz is timeshared between the
uplink and downlink. Uplink is the connection from the mobile to the base station, and downlink
is that from the base station to the mobile.
Table 3.1 summarizes the main parameters related to the WCDMA air interface.
Table 3.1. Main WCDMA parameters
Multiple Access Scheme DS-CDMA Duplex Scheme FDD/TDD Base station synchronisation Asynchronous operation Chip Rate 3.84 Mcps Carrier Spacing 4.4-5.2 MHz (200 kHz carrier raster) Frame Length 10ms Multirate concept Variable spreading factor and multicode Detection Coherent using pilot symbols or common pilotChannel Coding Scheme
Convolutional Code (rate 1/2 and 1/3 ) Turbo code
3.2 SPREADING AND DESPREADING
In 1985, the FCC (Federal Communications Commission) allocated three frequency bands
for a radio transmission technique known as spread spectrum communications, originally
developed by the military. This transmission technique has much greater immunity to interference
11

and noise compared to conventional radio transmission techniques. In addition, an increasing
number of users can use the same frequency. These rules are designed to drive usage towards local
data communications.
Spread spectrum is a modulation technique which increases the transmit signal bandwidth.
There are several benefits obtained in exchange for this increased bandwidth. First, spread
spectrum modulation mitigates the effect of inter-symbol interference (ISI) and narrowband
interference. The narrowband interference rejection also applies to hostile jamming signals, and
for that reason spread spectrum is often used in military systems. In addition, spread spectrum also
“hides” the signal beneath the noise floor. This property means that the transmitted signal is
another desirable property for military communication systems. Finally, spread spectrum
modulation can be used as a multiple access technique, which is the basis of the digital cellular
standard IS-95.
There are two common forms of spread spectrum: direct sequence (DS) and frequency
hopping (FH). Since direct sequence is more commonly used, we will focus on this technique. In
this section, the operation of direct sequence spread spectrum radio technology will be presented.
Conventional DS-CDMA systems offer several advantages in cellular environments
including easy frequency planning, high immunity against interference if a high processing gain is
used, and flexible data rate adaptation.
Besides these advantages, DS-CDMA suffers from several problems in multi-user wireless
communications systems with limited available bandwidth:
Multiple access interference (MAI)
As the number of simultaneously active users increases, the performance of the DS-CDMA
system decreases rapidly, since the capacity of a DS-CDMA system with moderate processing
gain (limited spread bandwidth) is limited by MAI.
Complexity
In order to exploit all multipath diversity it is necessary to apply a matched filter receiver
approximated by a rake receiver with sufficient number of arms. In addition, the receiver has to be
matched to the time-variant channel impulse response. Thus, proper channel estimation is
necessary. This leads to additional receiver complexity with adaptive receiver filters and a
considerable signaling overhead.
12

Single-/Multitone interference
In the case of single-tone or multi-tone interference the conventional DS-CDMA receiver
spreads the interference signal over the whole transmission bandwidth whereas the desired signal
part is despread. If this interference suppression is not sufficient, additional operations have to be
done at the receiver. Hence, this extra processing leads to additional receiver complexity.
3.2.1 Direct Sequence Spread spectrum
Figure 3.1 shows the process of a direct sequence spread spectrum system. A common
communication system that employs a wide bandwidth is a direct sequence spread spectrum (SS)
system. Its basic components are shown in the following figure. Information is encoded and
modulated by a PN sequence and transmitted over a bandwidth W.
ChannelEncoder Modulator Channel
DecoderDemodulatorChannel
PseudorandomPattern
Generator
PseudorandomPattern
Generator
Information
Sequence
Output
Data
Figure 3.1. Direct sequence Spread spectrum
The following Figure depicts the basic operations of spreading and despreading for a
DS-CDMA System.
Figure 3.2. Transmitted signals in DS-CDMA system
13

User data is here assumed to be a BPSK-modulated bit sequence. The spreading operation, in
this example, is the multiplication of each user data bit with a sequence of 8 code bits, called chips.
We assume this also for the BPSK spreading modulation and we can see that the resulting spread
signal has the same random appearance as the spreading code. In this case we would say that we
used a spreading factor of 8. This wideband signal would then be transmitted across a wireless
channel to the receiving end.
During despreading we multiply the spread user signal sequence, bit duration by bit duration,
with the very same 8 code chips as we used during the spreading of these bits. As shown, the
original user bit sequence has been recovered perfectly, provided we have (as shown in Figure 3.2)
also perfect synchronization between the spread user signal and the spreading code.
Figure 3.3. Power spectral density of baseband signal and SS signal
Figure 3.3 shows the power spectral density of baseband SS signal. A narrowband signal is
spread to a wideband signal over a broader portion of the radio frequency band, in order to utilize
the entire available bandwidth. Figure 3.4 shows the power spectral density of Basepass SS signal
after the interference of noise.
Figure 3.4. Power spectral density of baseband SS signal and Noise
14

Figure 3.5. Power spectral density of baseband SS signal and Interference
Figure 3.5 shows the power spectral density of baseband SS signal and Interference after
despreading. We can find that the part of noise which will interfere with the detector signal is the
detector noise that falls within the frequency region of the desired signal. Thus, this technique
makes the SS signal immune to interference
3.2.2 Pseudorandom Sequences (Spreading Codes)
The pseudorandom (PN) sequence is a binary sequence with an autocorrelation that
resembles, over a period, the autocorrelation of a random binary sequence. Its autocorrelation also
roughly resembles the autocorrelation of band-limited white noise. Although it is deterministic, a
PN sequence has many characteristics that are similar to those of random binary sequences, such
as having a nearly equal number of -1s and +1s, very low correlation between shifted versions of
the sequence, very low correlation between any two sequences, etc. The PN sequence is usually
generated using sequential logic circuits. A feedback shift register, which is diagrammed in Figure
3.6, consists of consecutive stages of two state memory devices and feedback logic.
FEEDBACK LOGIC
Stage1
Stage2
Stage3
Stagem
PN seqoutput
Clock
Figure 3.6. Block diagram of a generalized feedback shift register with m stages
15

Binary sequences are shifted through the shift registers in response to clock pulses, and the
output of the various stages are logically combined and fed back as the input to the first stage.
This shift register is called a linear PN sequence generator.
The initial contents of the memory stages and the feedback logic circuit determine the
successive contents of the memory. If a linear shift register reaches zero state at some time, it
would always remain in the zero state, and the output would subsequently be all 0s. Since there
are exactly nonzero states for an m-stage shift register, a sequence of period
generated by a linear feedback register is called a maximal length (ML) sequence.
12 −m 12 −m
3.3 MULTIPATH RADIO CHANNEL
Multipath radio propagation in the land mobile channel is characterized by multiple
reflections, diffractions and attenuation of the signal energy. These are caused by natural obstacles
such as buildings, hills, and so on.
0 1 2 3 4 5 6 7 8 9 1010-4
10-3
10-2
10-1
100Received field
Rec
eive
d fie
ld in
tens
ity
time
Figure 3.7. Fast Rayleigh fading as caused by multipath propagation
16

Figure 3.7 shows an exemplary fast fading pattern as would be discerned for the arriving
signal energy at a particular delay position as the receiver moves. We see that the received signal
power can drop considerably when phase cancellation of multipath reflections occurs.
3.4 RAKE RECEIVER
A DS spread-spectrum signal waveform is well matched to the multipath channel. In a
multipath channel, the original transmitted signal reflects from obstacles such as buildings and
mountains, and the receiver receives several copies of the signal with different delays. If the
signals arrive more than one chip apart from each other, the receiver can resolve them. Actually,
from each multipath signal’s point of view, other multipath signals can be regarded as interference
and are suppressed by the processing gain [7].
A further benefit is obtained, if the resolved multipath signals are combined using a RAKE
receiver. Thus, the signal waveform of CDMA signals facilitates use of multipath diversity.
Expressing the same phenomenon in the frequency domain means that the bandwidth of the
transmitted signal is larger than the coherence bandwidth of the channel and the channel is
frequency selective.
A RAKE receiver consists of correlators, each receiving a multipath signal. After despreading
by correlators, the signals are combined using, for example, maximal ratio combining. Because
the received multipath signals are fading independently, diversity order and thus performance are
improved.
The following Figure 3.8 illustrates a spread spectrum system with RAKE receiver.
Modulationg(t) X X
PN Generator tfcπ2cos
x(t)Data bits Channelh(t) + Demod Decision
Device
n(t)+I(t)
X
PN Generator
)(tsc )( τ−tsc
r(t)
Figure 3.8. A Spread Spectrum System with RAKE receiver
17

After spreading and modulation, the signal is transmitted and it passes through a multipath
channel, which can be modeled by a tapped delay line. The multipath components have different
delays and attenuation factors, and each of them correspondes to a different propagation path. It is
assumed that the receiver has perfect channel estimation.
The RAKE receiver has a receiver finger for each multipath component. In each finger, the
received signal is correlated by the spreading code, which is time-aligned with the delay of the
multipath signal.
After despreading, the signals are combined by MRC, where each signal is weighted by the
path gain. Because of transmitter or receiver movements, the scattering environment will change,
and thus, the delays and attenuation factors change as well.
Consider the case that the wideband signals are transmitted in a multipath environment. It is
regarded as a frequency selective channel which will be introduced in detail in section 3.5.2. As
we mentioned in section 3.2, the spreading codes are designed to have very low autocorrelation,
multipath components delayed by more than one chip duration are uncorrelated and appear as
resolvable paths in the model. Typically, WCDMA systems are designed to have several
resolvable paths within the multipath delay spread. At the same time, the delay spread must be
lower than the bit duration T. If the delay spread is larger than the bit duration T, then the data rate
is higher than the coherence bandwidth and ISI is introduced to the system. To avoid ISI, the data
rate should be maintained below the coherence bandwidth.
When the delay spread is lower than T and there are several delayed versions of the
transmitted code sequence with delay differences larger than Tc, they will have a low correlation
with the original code sequence. Thus, each of these delayed signals will appear at the receiver as
another uncorrelated user and will be ignored by the matched filter receiver of the desired signal.
However, spread spectrum signals are inherently resistant to multipath fading since multipath
components carry the information about the transmitted signal and they are independent. Thus, if
one of the multipath components is attenuated by fading, the other may not be and the receiver
could use unfaded components to make the decision. The WCDMA receiver that takes advantage
of the multiple paths to provide diversity is called a rake receiver.
The Rake receiver structure, shown in Figure 3.9, consists of a bank of correlators. Each of
them is used to detect separately one of the L strongest multipath components. This receiver is
18

basically a diversity receiver based on the fact that the multipath components in a WCDMA
system are uncorrelated if the relative delays are larger than the chip period. It uses the
autocorrelation properties of the code to coherently combine all multipath components.
X
X
)(tsc
)( 1−τtsc
)( 2τ−tsc
)( 1−− Lc ts τ
X
X
CoherentCombiner
DemodulatorData OutputReceived
Signal r(t)
Figure 3.9. Rake Receiver Architecture with L branches
Maximum Ratio Combining (MRC), Equal Gain Combining (EGC) and Selective Combining
(SC) are the three main combing methods. Although EGC is the most common, since it doesn’t
require knowledge of the multipath amplitudes.
As in other diversity receivers, the outputs from the correlators are weighted and added to
compute the estimate for the transmitted signal. Considering the three combining methods, the
mean value of the combining gain is shown in Figure 3.10. Observing that, EGC is just slightly
poorer than maximal ratio combining. For large values of L, we can see that there is about 1 dB
difference when compared to MRC. From the figure, we can see that MRC has the best combing
gain. If the MRC technique, which gives the highest reduction of fading, is used, the weighting
coefficient is the complex conjugate of the corresponding channel tap coefficient .*kk αα =
19

0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Com
bini
ng G
ain
Number of Path N
MRCEGCSC
Figure 3.10. Performance comparation of the three combining methods
Each multipath demodulator in the RAKE receiver is called a finger. In the original Rake
receiver [8] the delay between consecutive taps and the number of taps was fixed. These receivers
require a large number of taps in order to capture major multipath components. Modern receivers
have only a few Rake fingers and are capable of adjusting the tap positions. In this thesis, it is
assumed that there are 5 RAKE fingers and each of them is capable of adjusting the tap position.
A more detailed description of the RAKE receiver for the discrete-time multipath channel
model with unknown delays and amplitudes can be found in [9]. If we ignore the effects of
interference and synchronization errors, and we also assume a steep autocorrelation function
which equals zero for codes delayed by more than a chip time and one for codes within a chip
time, then performance of the RAKE receiver with L branches is identical to any other L-branch
diversity technique. Since these assumptions usually don’t hold in practice and spread spectrum is
more difficult to implement than other diversity techniques, spread spectrum is not usually used
for diversity alone. However, if spread spectrum signaling is chosen for its other benefits, such as
its multi-user or interference rejection capabilities, then L branch diversity comes almost for free.
[10]
20

3.5 WCDMA SIMULATION RESULTS IN SDR-WB
3.5.1 Flat Fading Channel
We know that a multipath fading channel having a delay spread much smaller than the
symbol duration is referred to a flat fading channel.
When the channel is flat fading, both the amplitude and the phase of the channel
multiplicative factor can be estimated at the receiver. The average symbol error probability is
obtained by averaging the conditional symbol error probability over all possible values of as Γ
, (3.1) γγγ dpPP ss )()(0 Γ
+∞
∫=
where is the instantaneous received SNR and Γ )(γΓp is the probability density function (pdf)
of the instantaneous SNR.
The amplitude of a fading channel is Rayleigh distributed. The average bit error probability
of BPSK is given by [11]
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
0
0
11
21
γγ
bP (3.2)
where 0γ is the average received SNR/bit.
3.5.1.1 Non-Adaptive Scheme
Firstly, let’s consider a non-adaptive scheme, where the Channel State Information (CSI) is
not known at the transmitter side. The signals are transmitted in a fixed rate and modulation
method. As shown in Equation 3.2, the average BER is a function of the mean SNR 0γ only. Here
the length of the spreading code is 127.
The average BER for BPSK is plotted in Figure 3.11. It is observed that the BER is
decreasing with the increasing SNR. The BER decreases slowly as compared to the performance
of the theoretical BER for BPSK in a Rayleigh fading channel given by Equation 3.2.
21

-10 -5 0 5 10 15 20 25 30 3510-5
10-4
10-3
10-2
10-1
100
SNR
BE
R
TheoreticalEmpirical.BPSK
Figure 3.11. Average BER for BPSK and QPSK over a Rayleigh fading channel
3.5.1.2 Adaptive scheme
Adapting transmission parameters according to the CSI can increase average throughput,
reduce required transmit power, or reduce error probability. We consider adaptation to enhance the
spectral efficiency.
The basic idea of adaptive system is to estimate the channel at the receiver and feed it back to
the transmitter, so that the transmission parameters can be adapted relatively to the CSI. Adaptive
modulation enables robust and spectrally efficient transmission over flat fading channels. In this
case, the transmitter has complete and accurate knowledge of the CSI so that adaptive modulation
can be applied to achieve high data rate transmission under a target BER.
To approach channel capacity, Gaussian signal has to be used. In reality, however, Gaussian
coding with continuous rate is unavailable and MQAM modulation with discrete modulation
orders is used instead.
When the full CSI is known at the transmitter side, a channel with high SNR can be assigned
with a high modulation order, whereas a channel with low SNR is assigned with a low modulation
order. No bits are loaded when the SNR is too low to carry.
22

0 5 10 15 20 25 30 35 401
2
3
4
5
6
7
8
9
10
11
SNR [dB]
Rat
e &
Thr
ough
put [
bps/
Hz]
CapacityCapacity CQAMThroughput
Figure 3.12. Throughput of an adaptive system in a Flat Rayleigh fading channel
Assuming a target BER, the optimum switching thresholds in order to maximize the spectral
efficiency are found for the transmission. The relationship between the modulation scheme and
various SNR can be found in details in [18].
In Figure 3.12, the performance of a DS-CDMA adaptive modulation system with the target
BER = 0.001 is plotted. The upper curve is the theoretic value of the channel capacity given by
Shannon theory and the middle curve is the spectral efficiency by using continuous MQAM
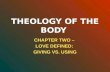
modulation [12]. The lower curve is the empirical spectral efficiency.
Limited to the modulation scheme of 64QAM, there is a leveling out of the practical
throughput while SNR larger than 25dB. It is also observed that there exists a large gap between
the channel capacity and the spectral efficiency, which is due to that Gaussian coding and infinite
coding length is assumed to achieve the capacity whereas uncoded discrete rate, MQAM
modulation, is applied in practice. CQAM, is a closer upper bound to the practical spectral
efficiency. The difference between them only comes from the rate continuity, which is not
achievable in practice.
23

-5 0 5 10 15 20 25 30 351
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
SNR [dB]
Rat
e &
Thr
ough
put [
bps/
Hz]
Throughput.TargetBER=0.01
Throughput.TargetBER=0.001
Figure 3.13. Throughput of the adaptive system for different target BER
Figure 3.13 shows the throughput versus SNR for different target BER. The higher the target
BER becomes, the higher the throughput will be.
3.5.2 Frequency Selective Fading Channel
If the transmitted signal has a bandwidth larger than the coherence bandwidth of the
channel , the channel can no longer be considered as a flat fading channel. In this case the
radio channel is regarded as a frequency selective channel. Given the symbol duration T and delay
spread , we can assume that T >> so that the ISI is negligible.
RB
mB
mT mT
The signal is transmitted through a multipath channel with different path gains. However,
each transmission of these signals can be considered as a transmission through a flat fading
channel.
Using the channel model for the frequency selective channel shown in Figure 3.10, we may
express the received signal as
(3.3) )()/()()(1
tnWitstctrL
ii +−= ∑
=
24

where W is the bandwidth of the signal and n(t) represents the AWGN. Therefore, the frequency
selective channel provides the receiver with up to L replicas of the transmitted signal, where each
signal component is multiplied by a corresponding channel tap weight , i=1, 2, …, L. )(tci
As introduced in section 3.3, in order to perform maximal ratio combining, it is necessary to
estimate the channel tap coefficients from the received signal. Here a RAKE demodulator
is used to collect all the signal components on all channel taps.
)(tci
3.5.2.1 Frequency Selective Fading channel with Non-adaptive scheme
Similarly to the flat fading channel, we assume that the transmitter and the receiver have
complete and accurate knowledge of the CSI.
The average BER is plotted for BPSK and QPSK in a frequency selective Rayleigh fading
channel is shown in Figure 3.14. As seen from the figure, the BER decreases with the increasing
SNR.
-10 -5 0 5 10 15 20 25 3010
-3
10-2
10-1
100
SNR [dB]
BE
R
Empirical.QPSKEmpirical.BPSK
Figure 3.14. BER versus SNR over a frequency selective Rayleigh fading channel
We also compared the BPSK and QPSK modulation in Flat Fading channel and Frequency
Selective fading channel, respectively. The number of paths L = 5 and the length of PN sequence
25

Lc = 127. The results are shown in Figure 3.15.
-10 -5 0 5 10 15 20 25 30 3510-3
10-2
10-1
100
SNR [dB]
BE
RBPSK.Flat FCQPSK.Flat FCBPSK.FS FCQPSK.FS.FC
Figure 3.15. Comparison of BER versus SNR in Flat FC and FS fading channel
We can see that with the same modulation, the BER in the frequency selective fading channel
is a little lower than that in flat fading channel. Since direct sequence (DS) waveforms have a wide
bandwidth, anytime that bandwidth exceeds the coherence bandwidth of the channel, the fading
tends to be frequency selective. Thus, a RAKE receiver can be used to enhance system
performance and decrease the BER with the same SNR.
3.5.2.2 Frequency Selective Fading channel with Adaptive scheme
In this section, the signal that transmitted through a Frequency Selective fading channel is
considered. In this channel model, a RAKE receiver with perfect CSI was assumed.
The result is shown in Figure 3.16. Similar with that in Flat Fading channel, the throughput
of an adaptive system with the target BER =0.001 is plotted. In the following figure, the upper
curve is the theoretic value of the system throughput and the middle curve is the theoretic value of
system capacity with CQAM. The lower curve is the empirical throughput. Compared with the
upper bound of system throughput, the empirical result is much less because of the QAM
modulation, without coding and a SNR loss.
26

-5 0 5 10 15 20 25 30 351
2
3
4
5
6
7
8
9
10
11
SNR [dB]
Rat
e &
Thr
ough
put [
bps/
Hz]
CapacityCapacity CQAMThroughput
Figure 3.16. Throughput of adaptive system in a Frequency Selective fading channel
Figure 3.17 shows the performance of the same system for different target BER. The
throughput increases with the increasing SNR. Comparing the two curves, we can see that the
higher the target BER, the lower the throughput.
-5 0 5 10 15 20 25 30 351
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
SNR [dB]
Rat
e &
Thr
ough
put [
bps/
Hz]
Throughput.TargetBER=0.01Throughput.TargetBER=0.001
Figure 3.17. Throughput of the adaptive system for different target BER
27

Chapter 4
Programming using
Matlab/Octave and C++ 4.1 INTRODUCTION
4.1.1 Matlab and Interface Function MEX file
MATLAB is a powerful tool in engineering field. However, it takes a long time to execute
because its nature is very slow in executing functions. In order to solve this problem, Mathworks
provides a toolbox to compile M-Files converting them to executable ones. Then we can write and
compile a script be executable whose extension is exe.
Functions could also be compiled to other executables called MEX-Files. MEX-Files in
Microsoft Windows have the dll extension. Now MATLAB can execute these functions very
quickly. MEX-Files in other operating systems have different extensions.
As we know, DLL is the abbreviation of Dynamic Link Library, and contains variables,
functions and classes which can be dynamically loaded by the operating system or in this case by
MATLAB. They can be executed very fast because they have been compiled.
The MATLAB M-Files are very good for putting functions or scripts together that run many
of MATLAB's fast Built-In functions. One of the advantages of these files is that they are never
compiled and can run in any system that is already running in MATLAB [13]. MATLAB achieves
so by interpreting each line of the M-File every time when running. This method of running the
code can make processing time very slow for complicated functions, especially those with many
loops, because every line within the loop will be interpreted as a new line. Good MATLAB code
avoids these things by using as many Built-In features and array operations as possible. However,
sometimes this is not enough.
28

MATLAB is capable of running C++ functions. The files that hold sources for these functions
are called MEX-Files. The mexFunctions are not intended to be a substitute for MATLAB's
Built-In operations. However, if you need to code many loops and other things, at which
MATLAB is not very good, mexFunction is a good choice. This feature also allows
system-specific Application Programming Interface (API) to be called to extend MATLAB's
abilities.
4.1.2 Octave and Interface Function OCT file
GNU Octave is a high-level language, primarily for numerical computations [14]. It provides
a convenient command line interface for solving linear or nonlinear problems numerically, and for
performing other numerical experiments by using a language that is compatible with Matlab. It
may also be used as a batch-oriented language.
The strength of Octave (as well as Matlab) is its short syntax for matrix operations. In fact it
is almost as readable and writable as the mathematical notation.
In some systems, such as Linux, Octave can dynamically load and execute C++ functions
[15]. Octave can only directly call functions written in C++, but we can also load functions written
in other languages by calling them from a simple wrapper function written in C++.
An OCT-File is a dynamical extension of the Octave interpreter, a shared library or shared
object in other words. The source files, that make up an OCT-File, are written in C++, and
therefore, conventionally, carry the extension cc. It is a means of writing an Octave function in a
compliable language like C++, rather than as a script file. This result is a significant acceleration
in the code.
Sometimes the performance of native Octave-code is not enough to tackle a problem.
Octave-code is interpreted, thus it is inherently slow when executing. In such a case moving from
M-code to compiled C++-code speeds up the execution by a factor of ten or more. The second
group of problems, where reverting to low-level code is necessary, is when interfacing with
foreign libraries or routines written in languages other than C++, most notably Fortran.
29

4.2 METHODOLOGY
4.2.1 Performance Analysis
Nowadays, software is used to solve complex numerical problems in a wide variety of
environments. Therefore the software and its mathematical algorithms need to be run in various
inhomogeneous hardware components.
Before we try and make any program to run faster, we first need to find out which bits of it
are executed slowly. Profiling the execution time of MATLAB code is easily achieved by adding
the commands [17]. The command is profile on before the start of the program, and profile viewer
after the codes end.
The profiling was run based on simulation of a MIMO-OFDM system. The three following
figures show the time spent on the functions and lines.
The function of line 190 and line 192 are the same base on the same simulation situation.
Line 192 is the existed code written by Matlab, and line 190 is rewritten by Matlab and c++.
Figure 4.1 shows the line 192 was the most time consuming part through the whole system. Thus,
we should first try to rewrite the Matlab code of the line 190.
Figure 4.1. Time spent on the functions
However, from the following figure, we can see that the line 190 consumes more time than
line 192. In our simulation environment, the programming using Matlab and C++ seems to be less
30

effective than Matlab programming.
In order to rewrite the Matlab code with C++, we need to rewrite three computation
algorithm codes. These computed codes are used to compute the multiplication between complex
matrices, complex number and complex matrices, and the addition between complex matrices.
Figure 4.2 shows the time spent on the three computation algorithm. It illustrates that the
computation between complex matrices took up the most time. Thus, first we should rewrite the
computation between complex matrices to increase the efficiency of the system.
Figure 4.2. Time spent on the lines
Figure 4.3. Time spent on the sub-lines
Analyzing the time spent in line 190, from the two figures above, we can see that commulz is
the most time consuming command in the written codes. This function is used for computing the
multiplication between two complex matrices. We will study the performance of this function in
the later sections.
31

4.2.2 MEX File Programming
The source code for a MEX-File consists of two distinct parts:
A computational routine that contains the code for performing the computations in the
MEX-File. Computations can be numerical computations, as well as inputting and outputting
data.
A gateway routine that interfaces the computational routine with MATLAB by the entry
point mexFunction and its parameters prhs, nrhs, plhs, nlhs, where prhs is an array of
right-hand input arguments, nrhs is the number of right-hand input arguments, plhs is an
array of left-hand output arguments, and nlhs is the number of left-hand output arguments.
The gateway calls the computational routine as a subroutine.
In the gateway routine, you can access the data in the mxArray structure and then manipulate
this data in the C computational subroutine. For example, the expression mxGetPr(prhs[0])
returns a pointer of type double * to the real data in the mxArray pointed to by prhs[0]. You can
then use this pointer like any other pointer of type double * in C. After calling your C
computational routine from the gateway, you can set a pointer of type mxArray to the data it
returns. MATLAB is then able to recognize the output from your computational routine as the
output from the MEX-File.
A detailed explanation of an example of MEX-Files is presented in the Appendix A. The file
commulz.c is used for computing the multiplication between two complex matrices. The file
comaddz.c is used for computing the addition between two complex matrices. The file
nummulcomz.c is used for computing the multiplication between a complex number and a
complex matrix.
4.2.3 OCT File Programming
Octave's dynamic linking features currently have the following limitations.
Dynamic linking only works on systems that support the GNU dynamic linker, dld.
Clearing dynamically linked functions doesn't work.
32

Octave uses a lot of memory if the dynamically linked functions are compiled to include
debugging symbols. This appears to be a limitation with dld, and can be avoided by not using
–g to compile functions that will be linked dynamically.
A detailed explanation of an example of OCT-Files is presented in the Appendix B. The file
mulocatcmat.cc is used for computing the multiplication between two complex matrices. The file
addoctcmat.cc is used for computing the addition between two complex matrices. The file
nmuloctcmat.cc is used for computing the multiplication between a complex number and a
complex matrix.
4.3 NUMERICAL RESULTS
4.3.1 Programming using Matlab and C++
The results of time in the MATLAB multiplication with different sizes of matrices are
presented in this section. Every point is averaged over 5000 realizations. The overloads of the
simulation in the two following figures are the same, and the difference is only the different sizes
of matrices.
50 100 150 200 250 300 350 400 450 50010-2
10-1
100
101
102
103
104
Size of Matrix
Tim
e
MatlabMatlab.C++
Figure 4.4. Time costs in the MATLAB multiplication with large matrix-size
33

The two figures show the performance of time costs in the matrix multiplication. Considering
the case when the matrix-size is very large, from Figure 4.4, we can see that the time spent by
using Matlab is less than that of using Matlab and C++.
5 10 15 20 25 30 35 40 45 5010-3
10-2
10-1
100
101
Size of Matrix
Tim
e
MatlabMatlab.C++
Figure 4.5. Time costs in the MATLAB multiplication with small matrix-size
Considering the case when the matrix-size is small, from the Figure 4.5, we can see that there
is a cross point of the two curves. It illustrates that the written code is efficient when the
matrix-size is small. However, as the matrix-size becomes larger, approximately 25, the existing
code in pure Matlab is more efficient.
4.3.2 Programming using Octave and C++
The two following figures show the average time spent on the matrix multiplication in
OCTAVE. The first figure considers the scenario with small matrix-size while the second one
considers large matrix-size.
The overloads of the simulation in the two following figures are the same, and the difference
is only the size of matrices. Figure 4.6 and Figure 4.7 show that programming using OCTAVE and
C++ will spend more time than programming only using OCTAVE. The larger the size of matrix
becomes, the larger the difference is.
34

0 5 10 15 20 25 30 35 40 45 5010-1.4
10-1.3
10-1.2
Size of Matrix
Tim
eOctaveOctave.C++
Figure 4.6. Time costs in the OCTAVE multiplication with small matrix-size
0 50 100 150 200 250 300 350 400 450 50010-2
10-1
100
101
Size of Matrix
Tim
e
OctaveOctave.C++
Figure 4.7. Time costs in the OCTAVE multiplication with large matrix-size
35

4.4 CONCLUSION
Through the figures above, we can see that the shown results are not the same as we thought
before. This is because that both Octave and Matlab link to external libraries to perform the matrix
and vector computations, and these libraries are directly highly optimized and probably faster than
anything we could use a simple Mex file. Maybe we could consider some other ways to increase
the efficiency, for example, by using the ATLAS project that is a library with OCTAVE focusing
on this area of the ongoing research.
36

Chapter 5
Conclusions and Future Work 5.1 CONCLUSIONS
In this thesis work, performance of the DS-CDMA communication system is presented by
using Matlab simulation environment. The performances of the system is expressed through
comparisons of the bit error rates (BER) that one obtained from different parameters of the signal,
channel model and implementation of the receiver. Both blind and adaptive scenarios are
considered. We also investigated the BER for the flat fading channel and frequency selective
fading channel. RAKE receiver is presented to solve ISI problem caused by multipath. So far, we
get some results as follow.
We tried to increase the efficiency of the Matlab code by combining Matlab/Octave with C++.
Although this goal was not reached, this project gives an insight to the simulation speed.
5.2 FUTURE WORK
The analysis of these different scenarios is discussed in the physical layer. In WCDMA
simulation, an interesting characteristic which could be taken into account is the Uplink and
Downlink scenarios. In addition, different spreading code and Multi-Carrier techniques should
also be considered. Furthermore, the simulations of CDMA2000 and TD-SCDMA based on this
workbench are also worth doing.
About the optimization of the codes, first we should find a profiler to analyze the efficiency
of the codes. A substantial amount of work still has to be done to implement this proposal. We
should find an efficient way to implement the improvement of the codes.
37

Appendix A MEX FILE
commulz.c /* In order to make a mex-function, you must include the "mex.h" library. This library contains all of the APIs that MATLAB provides.*/ #include "mex.h" void commulz(double *xr, double *xi, int m, double *yr, double *yi, int k, int n, double *zr, double *zi) { int i,j,l; zr[0]=0.0; zi[0]=0.0; for(i=0;i<m;i++) { for(j=0;j<n;j++) { for(l=0;l<k;l++) { *(zr+j*m+i)=*(zr+j*m+i)+*(xr+l*m+i)**(yr+j*k+l)-*(xi+l*m+i)**(yi+j*k+l); *(zi+j*m+i)=*(zi+j*m+i)+*(xr+l*m+i)**(yi+j*k+l)+*(xi+l*m+i)**(yr+j*k+l); } } } } /* Every MEX-File has the mexFunction entry point. There are four input parameters to the mexFunction which correspond to the way a function is called in MATLAB.*/ void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) { double *xr, *xi, *yr, *yi, *zr, *zi; int rows, cols, m, k, n;
38

/* Check the numbers of the input and output arguments. */ if (nrhs!=3) mexErrMsgTxt("Three inputs required."); if (nlhs>1) mexErrMsgTxt("Too many output arguments."); if (mxGetN(prhs[0])!=mxGetM(prhs[1])) mexErrMsgTxt("The vectors of Matrix 1 must be equal to the rows of Matrix 2."); /* Check if the first argument is Numeric. */ if (mxIsNumeric(prhs[0])==1) { xi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[0])==1) { xi = mxGetPi(prhs[0]); } /* Check if the second argument is Numeric. */ if (mxIsNumeric(prhs[1])==1) { yi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[1])==1) { yi = mxGetPi(prhs[1]); } /* Get the size of the input matrices. */ m = mxGetM(prhs[0]); k = mxGetN(prhs[0]); n = mxGetN(prhs[1]); /* Get real data elements of the input arguments. */ xr = mxGetPr(prhs[0]); yr = mxGetPr(prhs[1]);
39

rows = m; cols = n; /* Create output matrix. */ plhs[0] = mxCreateDoubleMatrix(rows,cols,mxCOMPLEX); /* Get real data elements and imaginary data elements of output arguments. */ zr = mxGetPr(plhs[0]); zi = mxGetPi(plhs[0]); commulz(xr,xi,m,yr,yi,k,n,zr,zi); return; }
40

comaddz.c #include "mex.h" void comaddz(double *xr, double *xi, int m, double *yr, double *yi, int n, double *zr, double *zi) { int i,j; zr[0]=0.0; zi[0]=0.0; for(i=0;i<m;i++) { for(j=0;j<n;j++) { *(zr+j*m+i)=*(xr+j*m+i)+*(yr+j*m+i); *(zi+j*m+i)=*(xi+j*m+i)+*(yi+j*m+i); } } } void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) { double *xr, *xi, *yr, *yi, *zr, *zi; int rows, cols, m, n; if (nrhs!=3) mexErrMsgTxt("Three inputs required."); if (nlhs>1) mexErrMsgTxt("Too many output arguments."); if (mxGetM(prhs[0])!=mxGetM(prhs[1])) mexErrMsgTxt("Both inputs must be in the same row."); if (mxGetN(prhs[0])!=mxGetN(prhs[1])) mexErrMsgTxt("Both inputs must be in the same vector.");
41

if (mxIsNumeric(prhs[0])==1) { xi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[0])==1) { xi = mxGetPi(prhs[0]); } if (mxIsNumeric(prhs[1])==1) { yi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[1])==1) { yi = mxGetPi(prhs[1]); } m = mxGetM(prhs[0]); n = mxGetN(prhs[0]); xr = mxGetPr(prhs[0]); yr = mxGetPr(prhs[1]); rows = m; cols = n; plhs[0] = mxCreateDoubleMatrix(rows,cols,mxCOMPLEX); zr = mxGetPr(plhs[0]); zi = mxGetPi(plhs[0]); comaddz(xr,xi,m,yr,yi,n,zr,zi); return; }
42

nummulcomz.c #include "mex.h" void nummulcom(double *xr, double *xi, int m, double *yr, double *yi, int n, double *zr, double *zi) { int i,j; zr[0]=0.0; zi[0]=0.0; for(j=0;j<n;j++) { for(i=0;i<m;i++) { *(zr+j*m+i)=*(xr)**(yr+j*m+i)-*(xi)**(yi+j*m+i); *(zi+j*m+i)=*(xr)**(yi+j*m+i)+*(xi)**(yr+j*m+i); } } } void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) { double *xr, *xi, *yr, *yi, *zr, *zi; int rows, cols, m, n; if (nrhs!=3) mexErrMsgTxt("Three inputs required."); if (nlhs>1) mexErrMsgTxt("Too many output arguments."); if (mxIsNumeric(prhs[0])==1) { xi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[0])==1) { xi = mxGetPi(prhs[0]); }
43

if (mxIsNumeric(prhs[1])==1) { yi = mxGetPr(prhs[2]); } if (mxIsComplex(prhs[1])==1) { yi = mxGetPi(prhs[1]); } m = mxGetM(prhs[1]); n = mxGetN(prhs[1]); xr = mxGetPr(prhs[0]); yr = mxGetPr(prhs[1]); rows = m; cols = n; plhs[0] = mxCreateDoubleMatrix(rows,cols,mxCOMPLEX); zr = mxGetPr(plhs[0]); zi = mxGetPi(plhs[0]); nummulcom(xr,xi,m,yr,yi,n,zr,zi); return; }
44

Appendix B DLL FILE
muloctcmat.cc /*The firrst line of the file includes declarations for all of Octave's internal functions that we will need. */ #include <octave/oct.h> /* The next line declares the function. */ DEFUN_DLD (muloctcmat, args, , "The multiplication of two complex matrices.") { octave_value_list retval; /* Get the value of the input matrices elements. */ const ComplexMatrix Am = args(0).complex_matrix_value(); const ComplexMatrix Bm = args(1).complex_matrix_value(); /* Get the size of the input matrices. */
int m = Am.rows(); int k = Am.cols(); int n = Bm.cols(); /* Create the output matrix. */ ComplexMatrix resAddm (m, n); /* Describe the computation algorithm of the function. */ for(int i = 0; i < m; i++) { for(int j = 0; j < n; j++) { resAddm(i,j).real() = 0.0; resAddm(i,j).imag() = 0.0; for(int l = 0; l < k; l++) {
45

resAddm(i,j).real() = resAddm(i,j).real() + Am(i,l).real() * Bm(l,j).real() - Am(i,l).imag() * Bm(l,j).imag(); resAddm(i,j).imag() = resAddm(i,j).imag() + Am(i,l).real() * Bm(l,j).imag() + Am(i,l).imag() * Bm(l,j).real(); } }
}
retval.append(resAddm); return retval; }
46

addoctcmat.cc #include <octave/oct.h> DEFUN_DLD (addoctcmat, args, , "The addition of two complex matrices.") { octave_value_list retval; const ComplexMatrix Am = args(0).complex_matrix_value(); const ComplexMatrix Bm = args(1).complex_matrix_value(); int m = Am.rows(); int n = Am.cols(); ComplexMatrix resAddm (m, n); for(int i = 0; i < m; i++) { for(int j = 0; j < n; j++) { resAddm(i,j).real() = Am(i,j).real() + Bm(i,j).real(); resAddm(i,j).imag() = Am(i,j).imag() + Bm(i,j).imag(); } } retval.append(resAddm); return retval; }
47

nmuloctcmat.cc #include <octave/oct.h> DEFUN_DLD (nmuloctcmat, args, , "The multiplication between complex number and complex matrix.") { octave_value_list retval; const Complex An = args(0).complex_value(); const ComplexMatrix Bm = args(1).complex_matrix_value(); int m = Bm.rows(); int n = Bm.cols(); ComplexMatrix resMulnm (m, n); for(int i = 0; i < m; i++) { for(int j = 0; j < n; j++) { resMulnm(i,j).real() = An.real() * Bm(i,j).real() - An.imag() * Bm(i,j).imag(); resMulnm(i,j).imag() = An.real() * Bm(i,j).imag() + An.imag() * Bm(i,j).real(); } } retval.append(resMulnm); return retval; }
48

Bibliography [1] John Glossner, Daniel Iancu, Jin Lu, Erdem Hokenek, and Mayan Moudgill, Sandbridge Technologies, Inc. “A Software-Defined Communications Baseband Design”, IEEE Communications Magazine, January 2003. [2] Paul Burns, “Software Defined Radio for 3G”, Artech.House, 2003. [3] Harri Holma and Antti Toskala, “WCDMA for UMTS, Radio Access For Third Generation Mobile Communications”, Third Edition, John Wiley & Sons, Ltd. [4] Hsiao-Hwa Chen, Changxin Fan and Willie W. Lu, “China’s Perspectives on 3G Mobile Communications and Beyond: TD-SCDMA Technology”, IEEE Wireless Communications, April 2002. [5] T.Eng and L.B.Milstein, “Coherent DS-CDMA performance in Nakagami multipath fading,” IEEE Trans. Commun., vol.43 pp.1134-1143, Mar. 1995. [6] Jinliang Huang, “A Matlab/Octave Simulation Environment for SDR with application to OFDM and MIMO”, Master thesis, Electronic System Design, Royal Institute of Technology, April, 2005. [7] Richard van Nee and Ramjee Prasad, “OFDM for wireless communication system”, Artech House, Boston London, 2002. [8] Price, R., and P.E.Green “A communication Technique for Multipath Channels,” Proc. IRE, vol.46, 1958, pp. 555-570. [9] G.L. Turin. “Introduction to spread spectrum antimultipath techniques and their application to urban digital radio,” IEEE Proceedings, Vol. 68, No. 3, pp. 328–353, March 1980. [10] Andrea Goldsmith, “Wireless Communication”, Stanford University, 2004. [11] John G. Proakis, “Digital communications”, Fourth Edition, McGraw-Hill, 2000. [12] S.T.Chung and A.J.Goldsmith, ”Degrees of freedom in adaptive modulation: A unified view”, IEEE Transactions on Communications, vol.49, no.9, pp. 1561-1571, Sept.2001. [13] Jason Laska, “Writing C Functions in MATLAB (MEX-Files)”, http://cnx.org/content/m12348/latest/ [14] About Octave, http://www.gnu.org/software/octave/about.html
49

[15] Octave_manual. [16] Jens Rücknagel, “An Octave Type Estimator – Essential Part of an Octave to C++ Compiler”, Master Thesis, Department of System and Control Theory Faculty of Computer Science and Automation Technical University Ilmenau, March, 2005 [17] “Improving performance in MATLAB”, http://www.enm.bris.ac.uk/staff/pjn/Programming/matlab.html [18] José F. Paris, M. del Carmen Aguayo-Torres, and José T. Entrambasaguas, “Optimum Discrete-Power Adaptive QAM Scheme for Rayleigh Fading Channels”, IEEE communications letters, VOL. 5, NO. 7, July 2001.
50
Related Documents