Proceeding of the 2013 RSI/ISM International Conference on Robotics and Mechatronics February 13-15, 2013, Tehran, Iran 978-1-4673-5811-8/13/$31.00 ©2013 IEEE Simple Modeling of Approximate Turning Characteristics of Tracked Mobile Vehicles in Steady State Condition Majid M. Moghadam Tarbiat Modares University Tehran, Iran [email protected] Ramin Mardani Islamic Azad University Of Central Tehran,Iran [email protected] Moosa Daryanavard Tarbiat Modares University Tehran, Iran [email protected] Abstract— To investigate the behavior of tracked mobile robots or vehicles, first a mathematical model is developed to describe the physics of tracked vehicles. Then, the equations of motion are solved for radius of rotation in steady state condition using a numerical method. Results are compared with an ideal differentially-driven vehicle and notable similarities are observed. Further, few mathematical functions are developed to approximate turning characteristics of the vehicle in steady state condition on rigid ground. Forms of these functions are simple and can be used in real time control and motion planning of tracked vehicles. Finally, the results are compared with similar works in the area. Key words— Tracked mobile vehicle, kinematic robot control, motion planning, turning characteristics. I. INTRODUCTION Despite obvious control similarities, motion control methods used for differential wheel robots and its results cannot be directly used for tracked vehicles [1]. However in this research a simple formulation is proposed to use these results and methods for tracked vehicles. Moreover, results of this work can improve the speed of calculations in autonomous control and motion planning of tracked robots. Tracked mobile vehicles and robots have more advantages comparing with wheeled vehicles on rough terrain, and that is why they are used vastly in the fields like agricultural, military, mining, and even city services and rescue assistance [2]. Using of tracked vehicles continued for a long period without feeling any necessity to autonomous control and motion planning of these vehicles. Until last decay when more serious works done in this area. Due to the sophisticated behavior of tracked mobile vehicles, improvements advanced with a substantial delay compared with other types of vehicles [3]. Complication rises from the geometry of track, sinkage and slippage phenomena and soil behaviors, and moving in such unprepared terrain has its own difficulties [4]. Control and motion planning of tracked vehicles have been more successful on rigid grounds and in steady state condition; however, good works are done in different conditions and useful reviews have been published to gather the works done in this field [5]. A kinematic approach for tracked mobile robots is proposed in order to improve motion control and pose estimation [6]. The proposed solution is based on the fact that the instantaneous centers of rotation (ICRs) of treads on the motion plane with respect to the vehicle are dynamics- dependent, but they lie within a bounded area. Numerical analysis is developed here to calculate the steering properties of a rigid suspension tracked vehicle turning on soft terrain [7]. The developed numerical analysis is based on a method to solve a set of non-linear equations. The comparison between measured and calculated values shows that the numerical analysis can predict sinkage, slip ratios and turning radius within an error amount of 15% . A three-dimensional multi-body simulation model for simulating the dynamic behavior of tracked off-road vehicles was developed using the LMS-DADS simulation program [8]. The normal and tangential forces are calculated using classical soil mechanics equations, it was concluded that the influence of the track dynamics and the soil–link interaction on the vehicle dynamics can be better predicted with the newly developed model. II. NOMENCLATURE d width of vehicle, normal distance between the left and the right wheels or tracks. (m) a x x component of Acceleration of C.G of vehicle in local frame. (m/sec 2 ) a y y component of Acceleration of C.G of vehicle in local frame. (m/sec 2 ) b Length of vehicle, distance between the first and the last axes. (m) c 1 constant coefficient c 2 constant coefficient

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
Simple Modeling of Approximate Turning
Characteristics of Tracked Mobile Vehicles in Steady
State Condition
Majid M. Moghadam
Tarbiat Modares University
Tehran, Iran
Ramin Mardani
Islamic Azad University Of Central
Tehran,Iran
Moosa Daryanavard
Tarbiat Modares University
Tehran, Iran
Abstract— To investigate the behavior of tracked mobile robots
or vehicles, first a mathematical model is developed to describe
the physics of tracked vehicles. Then, the equations of motion
are solved for radius of rotation in steady state condition using a
numerical method. Results are compared with an ideal
differentially-driven vehicle and notable similarities are
observed. Further, few mathematical functions are developed to
approximate turning characteristics of the vehicle in steady state
condition on rigid ground. Forms of these functions are simple
and can be used in real time control and motion planning of
tracked vehicles. Finally, the results are compared with similar works in the area.
Key words— Tracked mobile vehicle, kinematic robot control,
motion planning, turning characteristics.
I. INTRODUCTION
Despite obvious control similarities, motion control
methods used for differential wheel robots and its results
cannot be directly used for tracked vehicles [1]. However in
this research a simple formulation is proposed to use these
results and methods for tracked vehicles. Moreover, results of this work can improve the speed of calculations in autonomous
control and motion planning of tracked robots.
Tracked mobile vehicles and robots have more advantages comparing with wheeled vehicles on rough terrain, and that is
why they are used vastly in the fields like agricultural, military,
mining, and even city services and rescue assistance [2].
Using of tracked vehicles continued for a long period
without feeling any necessity to autonomous control and
motion planning of these vehicles. Until last decay when more
serious works done in this area. Due to the sophisticated
behavior of tracked mobile vehicles, improvements advanced
with a substantial delay compared with other types of vehicles
[3]. Complication rises from the geometry of track, sinkage and
slippage phenomena and soil behaviors, and moving in such
unprepared terrain has its own difficulties [4].
Control and motion planning of tracked vehicles have been
more successful on rigid grounds and in steady state condition; however, good works are done in different conditions and
useful reviews have been published to gather the works done in
this field [5].
A kinematic approach for tracked mobile robots is
proposed in order to improve motion control and pose
estimation [6]. The proposed solution is based on the fact that
the instantaneous centers of rotation (ICRs) of treads on the
motion plane with respect to the vehicle are dynamics-
dependent, but they lie within a bounded area.
Numerical analysis is developed here to calculate the
steering properties of a rigid suspension tracked vehicle turning
on soft terrain [7]. The developed numerical analysis is based
on a method to solve a set of non-linear equations. The
comparison between measured and calculated values shows
that the numerical analysis can predict sinkage, slip ratios and
turning radius within an error amount of 15% .
A three-dimensional multi-body simulation model for
simulating the dynamic behavior of tracked off-road vehicles
was developed using the LMS-DADS simulation program [8].
The normal and tangential forces are calculated using classical soil mechanics equations, it was concluded that the influence of
the track dynamics and the soil–link interaction on the vehicle
dynamics can be better predicted with the newly developed
model.
II. NOMENCLATURE
d width of vehicle, normal distance between the left and the right wheels or tracks. (m)
ax x component of Acceleration of C.G of vehicle in local frame. (m/sec2)
ay y component of Acceleration of C.G of vehicle in local frame. (m/sec2)
b Length of vehicle, distance between the first and the last
axes. (m)
c1 constant coefficient
c2 constant coefficient

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
c3 constant coefficient
c4 constant coefficient
DDV Differentially Driven Vehicle
f friction force acting on wheels (N)
Ic instantaneous center of rotation
k number of total axes
m mass of vehicle (kg)
MG resultant moments about C.O.M (N.m)
MWD Multiple Wheels Drive model
N normal force acting on a wheel (N)
d width of vehicle, normal distance between the left and the
right wheels or tracks. (m)
r radius of each wheel, Radius of Driver sprocket or pulley (m)
V linear velocity of chain or belt relative to track. (m/sec)
Vx x component of absolute velocity of vehicle at wheel contact point (m/sec)
Vy y component of absolute velocity of vehicle at wheel contact point (m/sec)
x x position of a wheel contact point (m)
y y position of a wheel contact point (m)
angle between a line tangent to path at origin, and x direction (deg)
angular velocity of driver pulley. (rad/sec)
r angular velocity of right track driver pulley(rad/sec)
l angular velocity of left track driver pulley(rad/sec)
U lr /
V lr (rad/sec)
z angular velocity MWD vehicle. (rad/sec)
zdd angular velocity DDV vehicle. (rad/sec)
coefficient of friction.
III. THE MODEL
A tracked mobile vehicle has a special chain or belt which
is lying over ground and has a large contact area in contrast with wheeled vehicles like differentially drive robots which
theoretically touch the ground at only two points. Tracks have
a driver sprocket and some contact areas encounter greater
forces (Fig. 1).
The linear velocity of chain or belt relative to the track can
be calculated as follows:
rv (1)
Figure 1: schematic of a tracked mobile vehicle and its high pressure contacts
area.
Where:
v: is the linear velocity of chain or belt relative to track.
r: is the radios of drive sprocket and pulley
: is the angular velocity of sprocket or pulley.
High pressure points in a tracked mobile robot provide an
insight to replace the track with a wheeled drive vehicle which
has many driver wheels (and axes for each pair)(Fig 2).
Figure 2: Multiple Wheels Drive Model (MWD).
Let name the model “Multiple Wheels Drive” (MWD). It
is assumed that all wheels (or axes) are driver and rotate with
same angular velocity. Number of total axes in the model is
defined by k. for k=1 the model changes to be a “differentially
drive Vehicle” (DDV), and its behaviour must approach to
DDV when solving equations. Another way for the behaviour
of MWD to be approached to DDV; is to decrease distance
between first and last axes near to zero. This is checked later in
the paper.
Geometrical properties of model:
Geometrical properties of model can be defined with four
parameters which are represented in Fig. 3.
d: width of vehicle, Normal distance between left and right
wheels or tracks.
b: length of vehicle, Distance between first and last axes.
k: Number of total axes.
r: radios of each wheel, radios of the driver sprocket or
pulley.
Numerical values of each parameter, in the calculations,
can be read from the table below:
Table 1: Numerical values of parameters.
Param.
Name d b r k N
Value 0.5m 0.7m 0.05m 8 600 N 0.6
In table 1 N is the vehicle weight and is the effective
kinematic coefficient of friction.
Geometrical parameters of motion:

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
Figure 4: Geometrical parameters of motion.
In Fig. 4 the robot is moving in a circle with the center
specified by “Instantaneous center of rotation” in a steady state
manner. The direction is C.C.W and is positive so that
Angular velocity of right track sprocket is more than the left
one. That is:
lr (2)
IV. EQUATIONS OF MOTION
It is assumed that each wheel encounters a different normal
force with a horizontal force due to friction. The friction is in
the opposite direction of relative velocity between the track and
the ground and obeys coulomb’s law of friction. Figure 5
shows a wheel for which equations (3) to (6) is written.
Figure 5: friction forces acting on a wheel.
rel
rel
V
VNf
(3)
jVirVV yxrelˆˆ)(
(4)
In equation 4 is alternatively and for right and left tracks.
Also we have:
)2
(d
RV yzx (5)
)( xRV yzy (6)
xV and yV are components of absolute velocity of vehicle
at contact points as the vehicle is considered as a rigid body.
We have 3 equilibrium equations for plane motion and here
regarding figure 4 we can write:
2
zxxx mRmaf (7)
2
zyyy mRmaf (8)
0GM (9)
The force components xf and yf (and its moments) are
summed over wheels from wheel number 1 to wheel number
2k.
Unknown parameters in the figure 4 are ,,, yx RRR
and z which are related by two equations:
222
yx RRR (10)
y
x
R
Rtan (11)
So 3 unknown parameters remain to be solved using 3
equations of motion. After properly substituting equations (3)
to (6) into equations of motion (7 to 9), the system of equations
can be solved with some numerical methods to obtain yx RR ,
and z , taking r and l
as inputs or known parameters.
It also means that yx RR , and z are functions of two
variable namely ),( lrxx RR , ),( lryy RR
and ),( lrzz ; But it is shown later in this paper that
new variables can be defined instead of r and l
to make
these functions to be only of one variable.
Equations of motion are described in equations 7 to 9 and is
solved with “fsolve” command of “MATLAB” software.

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
“fsolve” command solves a system of nonlinear equations
based on Gauss-Newton, Levenberg-Marquardt, and large
scale method [8]. A simple program was written to solve these
equations using “fsolve”.
V. VALIDATION OF MODEL AND SOLVING METHOD
Two check points are available to make sure that the model
and the method of solving equations works properly and gives
reasonable answers. First it is tested that when b approaches to
zero, the MWD behaviour becomes similar to DDV. For the
second it is tested that the answers converge by increasing k.
These are shown in Figures 6 and 7.
Results shown in figures 6 and 7 give a relatively good
validation for the method of solving problem but for more
validation some experiments can be performed;
Another conclusion which can be made from fig 7 is that
picking k=8 is enough for our calculations. That is the case for
rest of graphs in this paper.
Figure 1: Ry of MWD model approaches to Rydd (in DDV model) as b
approach to zero.
Figure 2: Ry converges when k is increased.
VI. BEHAVIOUR OF DDV
In the case of k=1 or b=0, MWD’s behaviour converges
to DDV. Exact solution of DDV can be found analytically.
Considering Fig. 6 parameters yddR , xddR and zdd can be
written as functions of r and l
as follows (assuming no slip
condition):
lzddydd rd
R )2
( (12)
rzddydd rd
R )2
( (13)
Solving for yddR and zdd gives:
)( lrzddd
r (14)
2)1(
ddR
l
r
ydd
(15)
Figure 3: motion geometry of DDV.
Equations (14) and (15) shows that although zdd and
yddR are two variable functions but new variables like u and v
can be defined to make them functions of only one variable.
(Equations 16 and 17: )
l
ru
(16)
lrv (17)
Substituting into (14) and (15) gives:

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
vd
rzdd (18)
2)1(
d
u
dRydd
(19)
Figures 9 to 12 plots graph of equations 14, 15, 18 and 19.
These graphs are considered as ideal behavior and will be
compared with actual behavior of tracked vehicle or MWD.
The angular velocities of tracks are ranged from 1 to 20
rad/s resulting in a linear velocity ranged from 0.05 to 1 m/s
which is our actual robot velocity range. And also note that
calculations are done only where lr (Eq. 2).
Graph in figure 9 plots Rydd as a function of r and l
..
Figure 4: Rydd as a function of r and l
. See Eq. 15. The graph is valid
for lr . See Eq. 2.
Figure 5:
zdd as a function of r and
l . See Eq. 14. The graph is valid
forlr . See Eq. 2.
Figure 6: Rydd as a function of u. See Eq. 19.
Figure 7: zdd as a function of v. See Eq. 18.
Rydd approaches to infinity when r approaches to l
or u
in equation 16 approaches to one. Also in this condition (or when
v approaches to zero) zdd approaches to zero, this is the case
when robot moves on a straight line.
VII. COMPARISON OF IDEAL AND ACTUAL MODELS
Results of solving equations of motion for MWD model are plotted in figures 13 to 16. Compare these figures with the
exact solution for DDV represented in figures 9 to 12.

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
Figure 8: Ry as a function of
r and
l . It is qualitatively comparable with
figure 9.
Figure 9:
z as a function of r and
l . It is qualitatively comparable
with figure 10.
By comparing Fig. 13 with Fig. 9 it is concluded that Ry
behaves very similar to Rydd described with the equations 15
and 19. This tends us to use data in Fig 14 to plot Ry as a
function of u and then compare it with Fig.11. This is done in
Fig 15:
Figure 10: Ry behaves very similar to Rydd.
Direct and important conclusion taken from Fig. 15 is that
equation 19 can be used to approximate Ry adding some
constant to it. Two general suggestions are given in equations
20 and 21:
2)1(
111
ac
u
acRcR yddy
(20)
211
212)1(
cac
u
accRcR yddy
(21)
Equation 21 gives more accurate results for Ry.
Also in a same way by comparing Fig. 14 with Fig. 10 it
is concluded that z behaves very similar to zdd described
with the equations 14 and 18. The comparison is made Fig 16:
Figure 11: z behaves very similar to zdd .
The direct conclusion taken from Fig. 16 is that equation
18 can be used to approximate z adding some constant to it.
A suggestion is given in equations 22:
vcd
rc zddz 33 (22)
Note that Ry in Fig 15 is larger than Rydd everywhere in
the graph and z in Fig 16 is smaller than zdd every where too,
This is physically reasonable because frictional forces in a
tracked mobile vehicle make the act of turning more difficult
for it, and namely we can say:
11 c (23)
02 c (24)
13 c (25)
Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
For the model solved here, numerical values for constants
defined in equations 21 and 22 obtained as follows:
c1=1.60
c2=0.50 (26)
c3=0.63
Compatibility of results in Eq 26 with Eqs 23 to 25 is
another qualitative validation for the model and method of
solving equation used here.
The other unknown parameter which is remained to be
solved is . is zero for ideal DDV model and so
approximate formula for it, can not be obtained in the same
way we done for Ry and z . But naturally we can guess that
is a function of u or v just like Ry and z , so it is plotted
versus u and v in Figs 17 and 18 respectively.
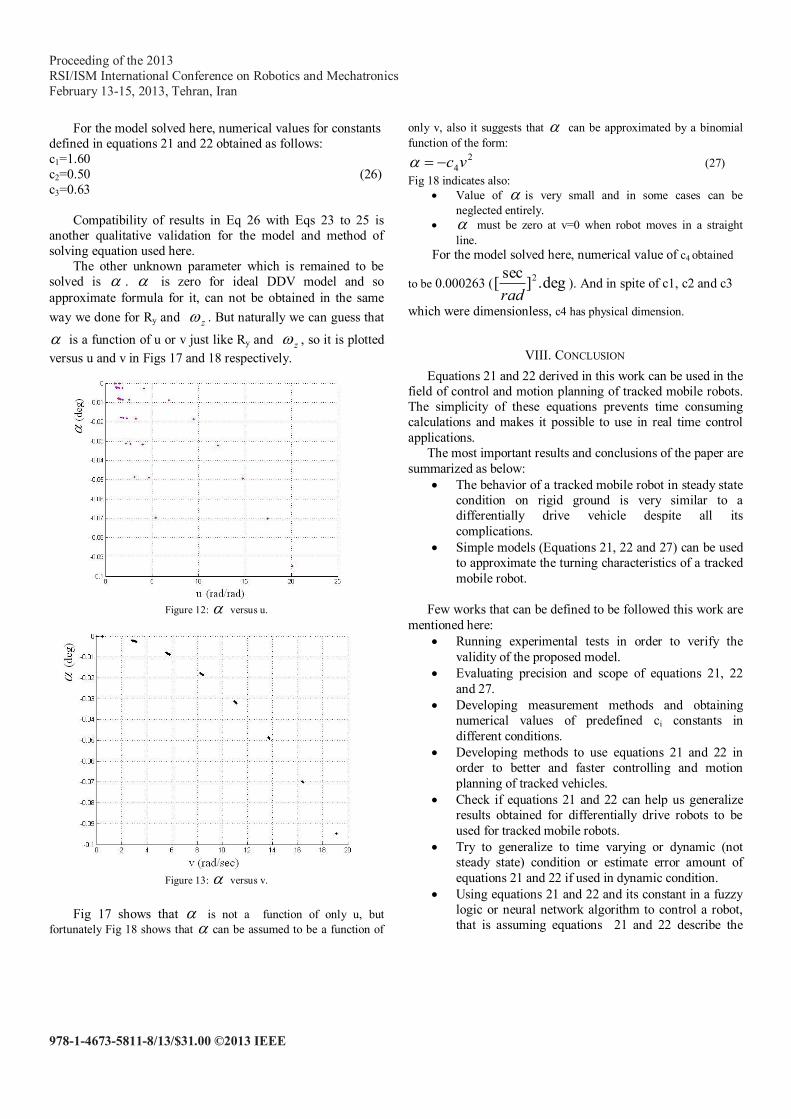
Figure 12: versus u.
Figure 13: versus v.
Fig 17 shows that is not a function of only u, but
fortunately Fig 18 shows that can be assumed to be a function of
only v, also it suggests that can be approximated by a binomial
function of the form: 2
4vc (27)
Fig 18 indicates also:
Value of is very small and in some cases can be
neglected entirely.
must be zero at v=0 when robot moves in a straight
line.
For the model solved here, numerical value of c4 obtained
to be 0.000263 ( deg.]sec
[ 2
rad). And in spite of c1, c2 and c3
which were dimensionless, c4 has physical dimension.
VIII. CONCLUSION
Equations 21 and 22 derived in this work can be used in the
field of control and motion planning of tracked mobile robots.
The simplicity of these equations prevents time consuming
calculations and makes it possible to use in real time control
applications.
The most important results and conclusions of the paper are
summarized as below:
The behavior of a tracked mobile robot in steady state
condition on rigid ground is very similar to a
differentially drive vehicle despite all its
complications.
Simple models (Equations 21, 22 and 27) can be used
to approximate the turning characteristics of a tracked
mobile robot.
Few works that can be defined to be followed this work are
mentioned here:
Running experimental tests in order to verify the
validity of the proposed model.
Evaluating precision and scope of equations 21, 22
and 27.
Developing measurement methods and obtaining
numerical values of predefined ci constants in
different conditions.
Developing methods to use equations 21 and 22 in
order to better and faster controlling and motion
planning of tracked vehicles.
Check if equations 21 and 22 can help us generalize
results obtained for differentially drive robots to be
used for tracked mobile robots.
Try to generalize to time varying or dynamic (not
steady state) condition or estimate error amount of
equations 21 and 22 if used in dynamic condition.
Using equations 21 and 22 and its constant in a fuzzy
logic or neural network algorithm to control a robot,
that is assuming equations 21 and 22 describe the

Proceeding of the 2013
RSI/ISM International Conference on Robotics and Mechatronics
February 13-15, 2013, Tehran, Iran
978-1-4673-5811-8/13/$31.00 ©2013 IEEE
motion of robot but, ci coefficient are dynamically
varying as robot moves.
REFERENCES
[1] Ramnَ Gonzalez , Mirko Fiacchini , José Luis Guzmin,
Teodoro ilamo, Francisco Rodriguez , Robust tube-based
predictive control for mobile robots in off-road conditions ,
Robotics and Autonomous Systems 59 (2011) 711–726
[2] Liang Ding, Haibo Gao , Zongquan Deng , Keiji
Nagatani , Kazuya Yoshida , Experimental study and analysis
on driving wheels’ performance for planetary exploration
rovers moving in deformable soil , Journal of Terramechanics
48 (2011) 27–45
[3] Alireza Pazooki a,n, SubhashRakheja a, DongpuCao ,
Modeling and validation of off-road vehicle ride dynamics ,
Mechanical Systems and Signal Processing 28 (2012) 679–695
[4] R.A. Irani , R.J. Bauer, A. Warkentin , A dynamic
terramechanic model for small lightweight vehicles with
rigid wheels and grousers operating in sandy soil , Journal
of Terramechanics 48 (2011) 307–318
[5] J.Y. Wong a,*, Wei Huang , ‘‘Wheels vs. tracks’’ – A
fundamental evaluation from the traction perspective , Journal
of Terramechanics 43 (2006) 27–42
[6] J. L. Martínez, A. Mandow, J. Morales, S. Pedraza, A.
García-Cerezo, Approximating Kinematics for Tracked Mobile
Robots, International Journal of Robotics Research, Vol. 24,
No. 10, 2005,867-878.
[7] J.Y. Wong, Wei Huang, “Wheels vs. Track” – A Fundumental Evaluation from the Traction Perspective,
Journal of Terramechanics, 43, 2006, 27–42.
[8] MATLAB (TR) R14 help file – optimization tool box,
Math Works INC, 1984-2012.
Related Documents











